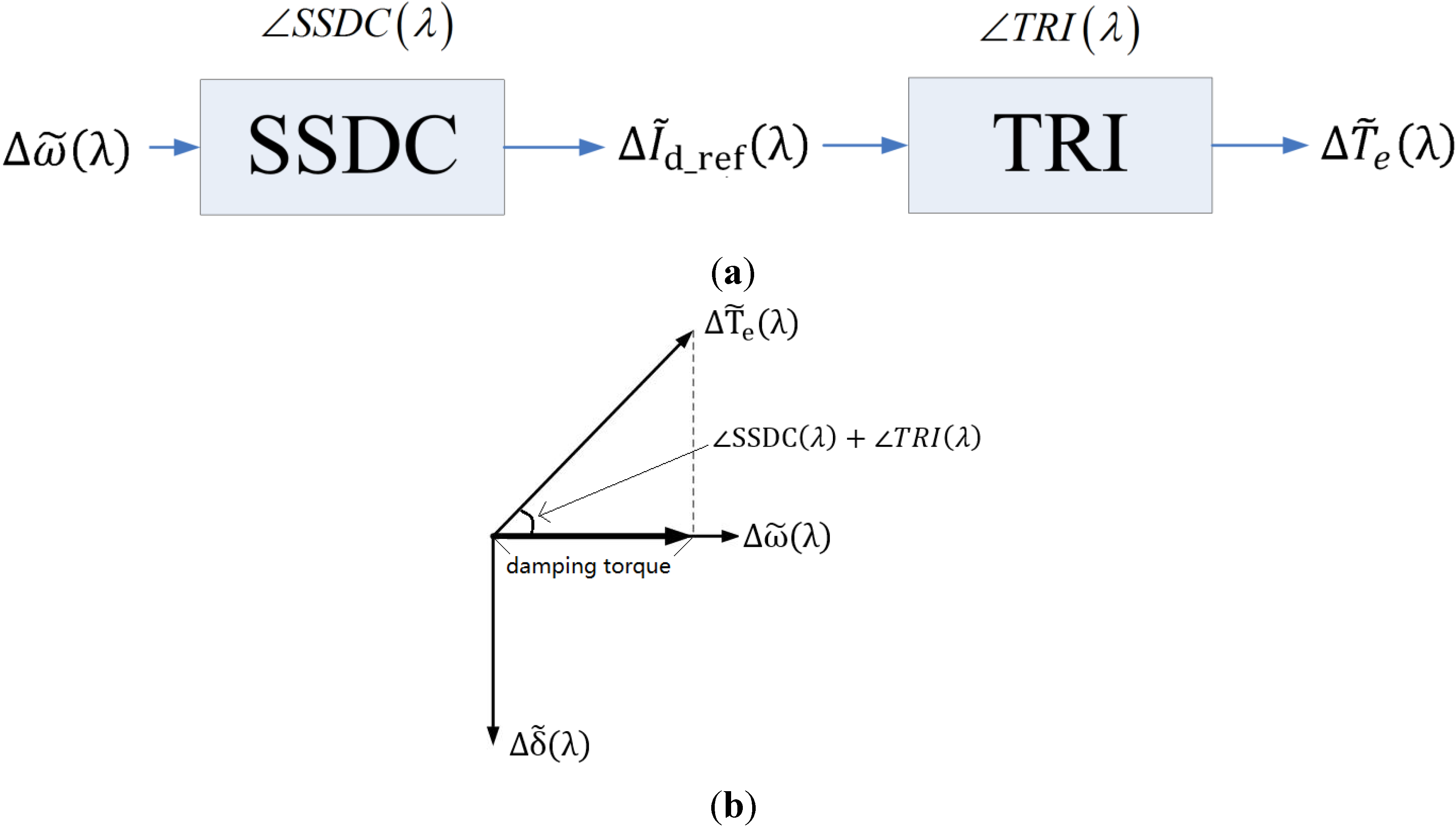
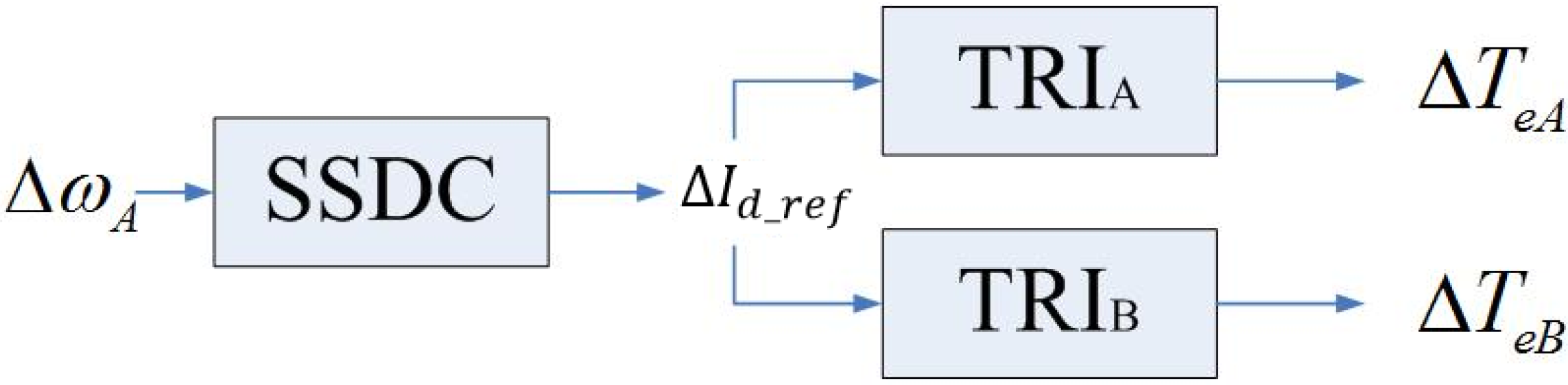
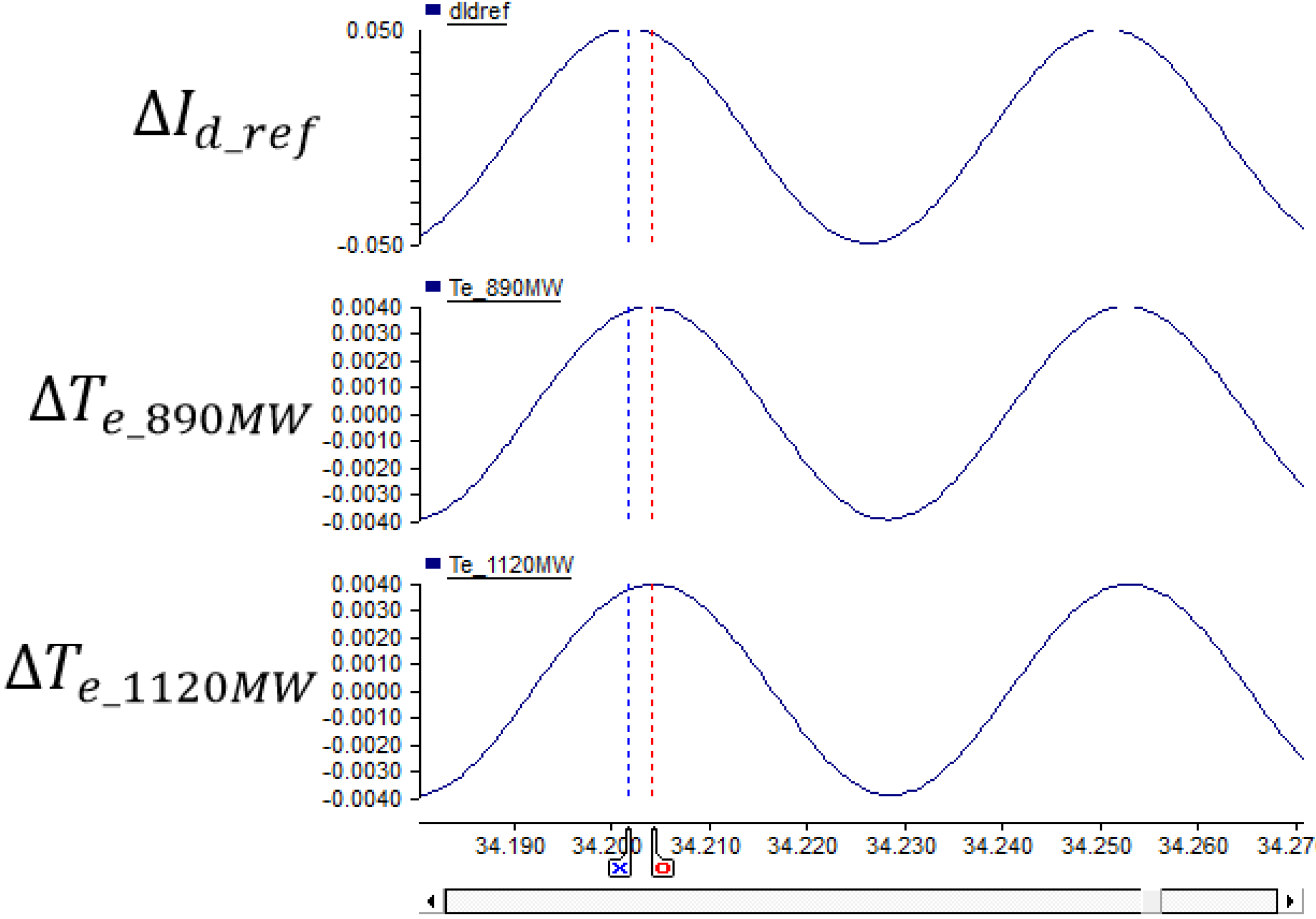
Assume that there are two generators operating in parallel in the system, which we denote as Generator A and Generator B. Suppose Generator A has a mechanical natural frequency . When SSO occurs, the speed deviation of Generator A will contain the component, , of this frequency. Correspondingly, the SSDC will output a current reference signal . It should be noted that this current reference signal will not only induce an additional electrical torque, , of frequency on Generator A. Simultaneously, it will induce an additional electrical torque, of the same frequency on Generator B. If Generator B has no mechanical natural frequency close to (within 0.3 Hz, for instance), then we can believe that has no obvious effect on shaft oscillation of Generator B. On the other hand, if Generator B happens to have a natural frequency close to , special attention should be paid to the interaction between the two generators.
Now assume that the two generators have the common mechanical natural frequency of
. For clarity, phase relationship of key variables in this situation is shown in
Figure 3. In
Figure 3,
is the output signal of SSDC.
and
are the phase differences between the additional electrical torques induced on the generators,
and
, and
and
are the speed deviations of the two generators under the common natural frequency. From
Figure 3, it is clear that the phase difference of
and
is
, which is almost constant and depends on the configuration of the electrical system. Then, the question arises that whether or not the phase difference of the speed deviations,
and
, is also constant. If it is not so, obviously the SSDC cannot be guaranteed to provide a positive damping for the two generators simultaneously. Hence the phase difference of the speed deviations of the two generators under their common mechanical natural frequency is the subject we are going to treat.
Figure 3.
Phase relationship of key variables concerned in double-generator SSDC design.
3.1. Shaft Oscillation Characteristic of Double Generators Having a Common Mechanical Natural Frequency
For double identical generators operating in parallel, eigenvalue analysis results will show that under each common natural frequency of the generators, there are two oscillation modes in which both generators will participate, namely, a common-mode and an anti-mode. In common-mode, the masses in each generator shaft oscillate in-phase. Common-mode reflects the interaction between the outer electrical system and the two generators. On the other hand, in anti-mode, the masses in each generator shaft oscillate out-of-phase. Anti-mode reflects the native interaction between the two generators [
10].
If our main attention is on the torsional characteristic of the shaft systems of the generators, we can briefly treat the electrical system as ‘electrical springs’ [
10]. That is to say, we will approximately have
, from the classical power-angle equation that
, or
. Also, under a natural frequency
of a generator shaft, from the perspective of the outer system, the generator shaft can be viewed as a single equivalent mass in connection with a single equivalent ‘mechanical’ spring. The inertia,
, of the equivalent mass is called the modal inertia and we have
where
are the inertias of the real masses in the shaft and
and
are the mode shapes of the corresponding mode [
13]. The stiffness coefficient of the equivalent ‘mechanical’ spring,
, can be calculated from the relationship that
, where
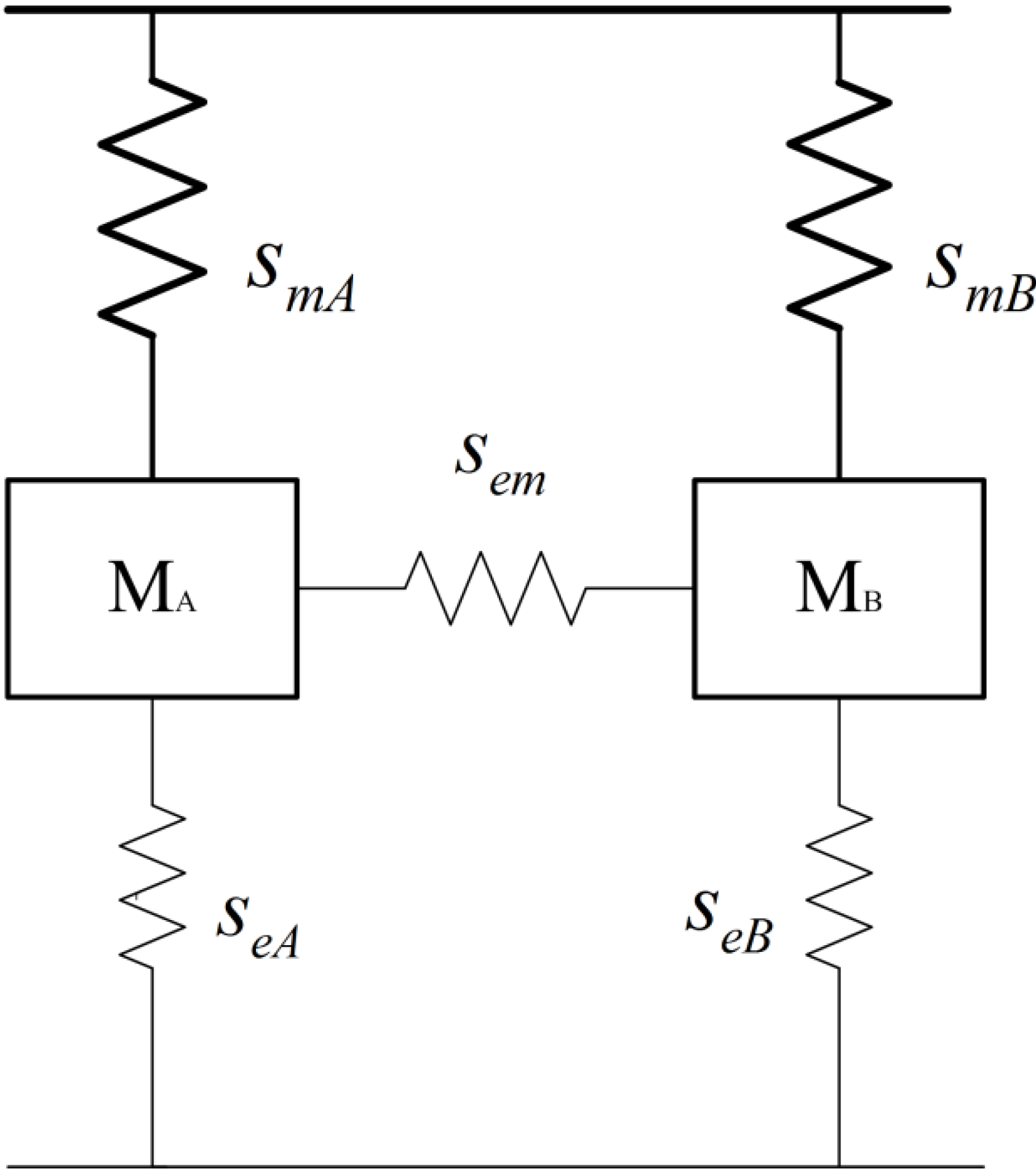
is the natural frequency. Combing the equivalent electrical system and the equivalent mechanical system, under the common mechanical natural frequency of the generators, the whole system can be represented by a simplified mechanical equivalent, shown in
Figure 4. In
Figure 4,
and
are respectively the modal inertias of generator A and generator B under their common natural frequency, and
and
are the corresponding equivalent modal mechanical stiffness coefficients.
,
and
are the equivalent electrical stiffness coefficients, whose magnitudes are well separated with those of mechanical ones from observation of typical values, namely,
. Hence, “electrical springs” have little impact on the mechanical natural frequencies and the modal shapes of the generator shafts.
Figure 4.
Mechanical equivalent of double-generator system.
Figure 4.
Mechanical equivalent of double-generator system.
Now, we analyze situations with two non-identical generators operating in parallel. Denoting the common natural frequency of the two generators as
, we have:
The state equation of the system is:
where
and
are the power angle deviations of the two generators. Considering
, Equation (2) can be simplified to:
With Equations (1) and (3), we can verify that this equivalent system has two oscillation modes, whose frequencies and modal shapes are:
And:
From above analysis, we verify that for systems with two non-identical generators operating in parallel, under their common mechanical natural frequency, there still exists a common-mode and an anti-mode. It should be pointed out that by the common-mode, we merely mean that the generator masses, instead of all the masses, in the two generator shafts oscillate in-phase. Similar meaning also applies to anti-mode. Moreover, from the modal shape of the anti-mode, , it can be seen that in this mode, the oscillation amplitudes of the two generator masses are reversely in proportion to the corresponding modal inertia. The physical interpretation of this phenomenon is that the anti-mode reflects the native interaction of the two generators through the “electrical spring”, . Hence, the restoring torques the two generator masses experience in oscillation have the same magnitude, so that the oscillation amplitudes as well as the angular accelerations of the two generators will be reversely in proportion to the corresponding modal inertias.
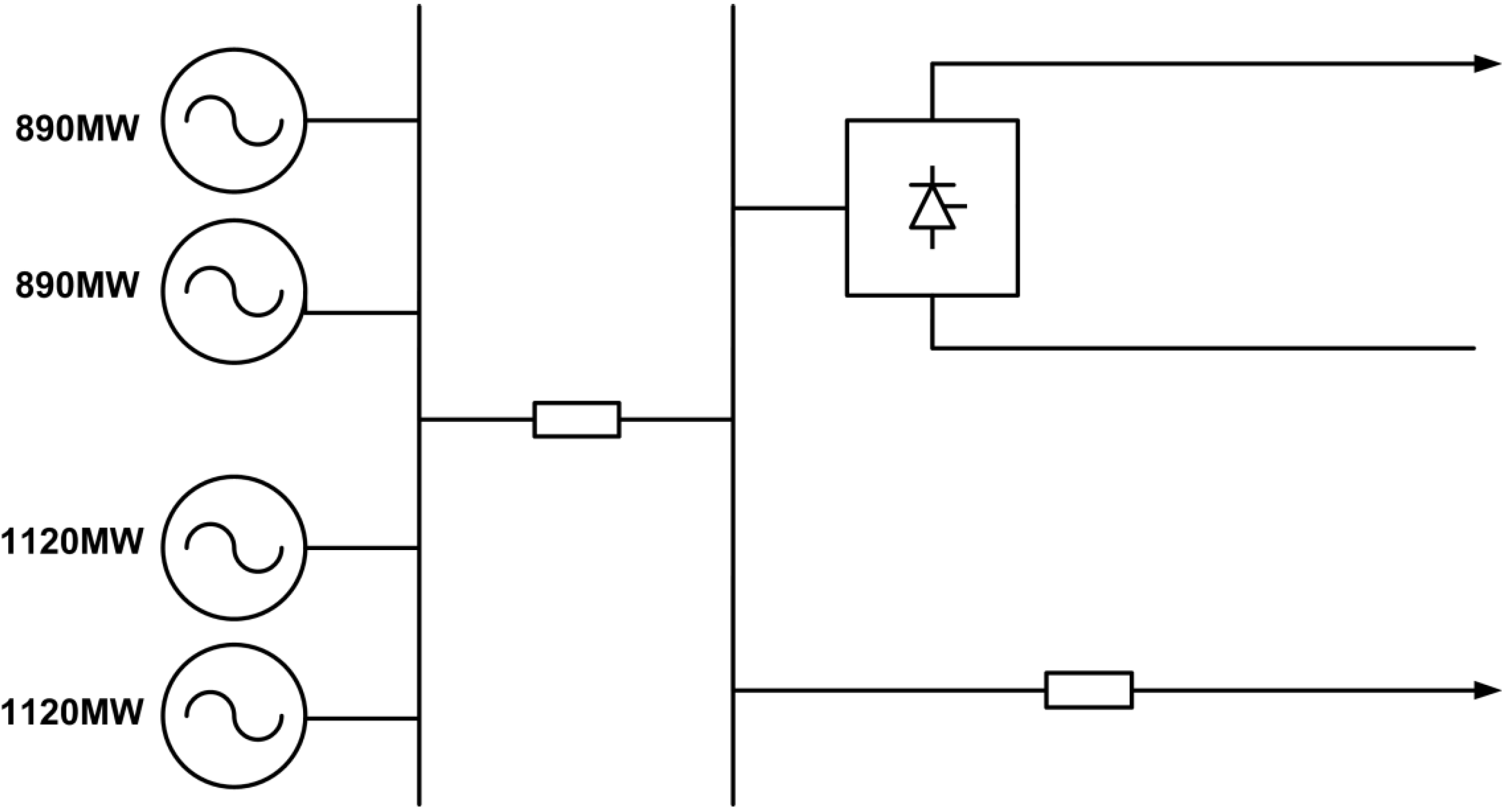
Now we take system #2 of the IEEE SSO second benchmark model (SBM) [
13] as an example to verify the above analysis. In this system, there are two non-identical generators operating in parallel. Generator A (600 MVA), with four masses in its shaft, has mechanical natural frequencies of 24.65 Hz, 32.39 Hz and 51.10 Hz. Generator B (700 MVA), with three masses in its shaft, has mechanical natural frequencies of 24.65 Hz and 44.99 Hz. It can be seen that the two generators, though non-identical, share the common natural frequency of 24.65 Hz. The detailed mechanical data of the shaft system of the generators are shown in
Table 1 and
Table 2. The modal inertias of the generators under their common natural frequency, 24.65 Hz, are shown in
Table 3. This example is representative and we now calculate its modal shapes.
Table 1.
Mechanical data for Generator A.
Table 1.
Mechanical data for Generator A.
| Mass | Inertia lbm∙ft2 | Damping lbf∙ft∙sec/rad | Spring Constant in lbf∙ft/rad |
|---|
| Exciter | 1383 | 4.3 | 4.39e6 |
| Generator | 176,204 | 547.9 | 97.97e6 |
| Low-pressure turbine | 310,729 | 966.2 | 50.12e6 |
| High-pressure turbine | 49,912 | 155.2 | – |
Table 2.
Mechanical data for Generator B.
Table 2.
Mechanical data for Generator B.
| Mass | Inertia lbm∙ft2 | Damping lbf∙ft∙sec/rad | Spring Constant in lbf∙ft/rad |
|---|
| Generator | 334,914 | 208.2 | 156.1e6 |
| Low-pressure turbine | 370,483 | 230.4 | 198.7e6 |
| High-pressure turbine | 109,922 | 68.38 | – |
Table 3.
Modal inertias of the generators under their common natural frequency.
Table 3.
Modal inertias of the generators under their common natural frequency.
| Generator | Modal Inertia (p.u.) | Rated Capacity (MVA) |
|---|
| A | 1.55 | 600 |
| B | 2.495 | 700 |
As has been pointed out, the equivalent electrical stiffness coefficients, , and , whose magnitudes are well separated with those of mechanical ones, have no great impact on the modal shapes of the system. Approximately, in our calculation, we take (, are the terminal voltage magnitudes of the two generators and , are the leakage reactances of their transformers) and .
With the data above we can obtain the state equations of this system and carry out eigenvalue analysis to calculate the frequency and mode shape of each oscillation mode. The calculation result is shown in
Table 4. In
Table 4, each row represents the right-eigenvector of an oscillation mode, which is also the mode shape of the corresponding mode. As the eigenvalues and eigenvectors appear in conjugate pairs, only those with a positive imaginary part are displayed. From the first and second row of
Table 4, it can be seen that there are both a common-mode and an anti-mode, in which both generators participate, under the shared natural frequency of the two generators. The frequencies of common-mode and anti-mode are near to each other. The first row of
Table 4 corresponds to the common-mode, whose eigenvector reveals that the generator masses of the two generator shafts oscillate almost in-phase. The second row of
Table 4 corresponds to the anti-mode, whose eigenvector reveals that the generator masses of the two generator shafts oscillate almost out-of-phase. Apart from the above two modes, the remaining three modes are all the natural modes of one of the generators. As the frequencies of those three modes are well separated with each other, it can be seen from their eigenvectors that only the corresponding generator participates in oscillation.
Table 4.
Eigenvalue result of the equivalent double-generator system.
Table 4.
Eigenvalue result of the equivalent double-generator system.
| Eigenvalue | Frequency/Hz | Mode Shape (right-eigenvector) |
|---|
| Masses in Generator A | Masses in Generator B |
|---|
| | | | | | |
|---|
| −0.03 + j155.2 | 24.7 | 0.500 + j0.000 | 0.127 + j0.000 | −0.366 + j0.000 | −0.479 + j0.000 | 0.400 + j0.006 | 0.234 + j0.003 | −0.394 − j0.006 |
| −0.04 + j157.0 | 25.0 | 0.596 + j0.000 | 0.141 + j0.000 | −0.434 + j0.000 | −0.573 + j0.000 | −0.215 + j0.003 | −0.124 + j0.002 | 0.217 + j0.003 |
| −0.05 + j203.6 | 32.4 | −0.890 + j0.000 | 0.252 + j0.000 | −0.194 + j0.000 | −0.327 + j0.000 | −0.002 + j0.000 | 0.000 + j0.000 | 0.003 + j0.000 |
| −0.03 + j282.8 | 45.0 | 0.000 + j0.000 | 0.000 + j0.000 | −0.001 − j0.000 | −0.004 + j0.000 | 0.933 + j0.000 | −0.350 − j0.000 | 0.081 + j0.000 |
| −0.05 + j321.1 | 51.1 | 0.000 − j0.000 | −0.001 + j0.000 | 0.010 − j0.000 | −1.000 + j0.000 | −0.000 + j0.000 | 0.000 − j0.000 | −0.000 + j0.000 |
For the anti-mode, we obtain that the oscillation amplitude ratio of the two generators is:
On the other hand, referring to
Table 3, the ratio of the modal inertias of the two generators under the common natural frequency is:
Thus, the conclusion that in anti-mode, the oscillation amplitudes of the two generators masses are reversely in proportion to the corresponding modal inertias is basically valid. The reason why there is an error is that the equivalent electrical stiffness coefficients, , , and the modal damping coefficients slightly influence the frequencies and modal shapes of the oscillation modes.
In reference [
11], it is shown that the phase relationship and relative amplitude of the generator masses in common-mode and anti-mode are also very dependent on the presence of series capacitors, especially when the electrical natural frequency matches the mechanical one. This is because under this condition, the magnitude of the electrical damping coefficient may become very large and have a noticeable impact on the oscillation modes of the system. In this paper, however, we mainly treat systems without series capacitors so that a resonance condition will not occur. Hence the statement that the electrical system has no great impact on the oscillation modal shapes can be considered reasonable.
In addition, we mention that for situations of two identical generators operating in parallel, as the modal inertias of the two generators under each common natural frequency are the same, the oscillation amplitudes of the two generator masses in each anti-mode are also the same, which can be regarded as a special case of the above reversely proportional relationship.
3.2. Phase Relationship of the Speed Deviation Signals of Two Generators Operating in Parallel Under Their Common Natural Frequency
As has been shown, the phase relationship of the speed deviation signals of the generators under their common natural frequency is a key consideration for SSDC design. For two generators operating in parallel, under their common natural frequency there exist both a common-mode and an anti-mode. In the actual oscillation, the speed deviation signal will be the addition of both of these two modes. If the anti-mode is hardly excited, the speed deviations will contain mostly the common-mode component, and the speed deviation signals of the two generators will be in-phase. On the other hand, if the common-mode is hardly excited, the speed deviations will contain mostly the anti-mode component, and the speed deviation signals of the two generators will be out-of-phase. More generally, however, if both the common-mode and the anti-mode are simultaneously excited, then there will be an uncertain phase relationship between the speed deviation signals of the two generators.
As we know, the extent to which mode k of a system is excited depends on:
where
is the left eigenvector corresponding to mode
k and
is the initial value of the state variables of the system [
14].
For situations where two identical generators, generator A and generator B, operating in parallel, and assume that they deliver the same power, then for anti-mode k of the system, we have:
and:
Apparently, now , namely, the anti-mode of this system would not be excited. This is exactly the reason why in this system, the speed deviation signals of the two generators will be in-phase.
If the two identical generators do not deliver the same power, then Equations (9) and (10) will hold not exactly but approximately, so that in this situation we have ; namely, the anti-modes will be excited slightly. Hence the speed deviation signals of the two generators will almost be in-phase.
Finally, for situations of two non-identical generators operating in parallel, the parameters of the generators are no longer the same; the oscillation amplitudes of the shaft masses in the anti-mode may be different and even the number of shaft masses of the two generators may differ. As a result, Equations (9) and (10) will no longer hold and we have ; namely, the anti-mode of the system may be excited. As the extent to which the common-mode and the anti-mode are excited is uncertain, the phase relationship of the speed deviation signals of the two generators will also be uncertain.
In reference [
10], it is shown that when two identical generators operate in parallel, the speed deviation signals of the two generators will be in-phase and the two generators can be represented by a single equivalent generator. In reference [
15], it is shown that if the two identical generators do not deliver the same power, then there will be a slight phase difference, which is generally no more than 40°, between the speed deviation signals of the two generators. These observations are consistent with the above analysis we have made. In this paper, whether there will be a definite phase relationship between the speed deviation signals of the generators, regardless of whether they are identical or non-identical, is demonstrated to be dependent on the extent to which the anti-mode of the system is excited.
In addition, there is one more issue to mention. The frequencies of the common-mode and the corresponding anti-mode will be very close but not exactly the same. Hence, when the common-mode component and the anti-mode component are added, a phenomenon called ‘beat’ will arise, namely, the amplitude of the resultant signal will oscillate at a very low frequency. This phenomenon is common. For instance, we may sometimes observe that the amplitude of a decaying oscillation can temporarily increase even though there is no negative damping in the system. In SSDC design, most attention is paid to the phase relationship of the signals, and the ‘beat’ phenomenon does not have a noticeable impact.
3.3. SSDC Design Based on Mode Separation
As has been demonstrated in
Section 3.2, for systems with two non-identical generators operating in parallel, the phase relationship of the speed deviation signals of the two generators under their common natural frequency is uncertain. However, as has been shown in the beginning of this section, if the phase relationship of the speed deviation signals of the generators is uncertain, it can hardly be guaranteed that the SSDC is capable of providing a positive damping for all the generators simultaneously. Hence, simply taking the original speed signals of the generators as the input signal of SSDC is infeasible.
The reason why there is an uncertain phase relationship between the speed deviation signals of the generators is that during the oscillation, the common-mode and the anti-mode are simultaneously excited. As the anti-mode represents the local interaction of the two generators, it does not couple with the HVDC system. Hence, under the impact of the mechanical damping of the generator shafts, the anti-mode is inherently stable. That is to say, only the common-mode may be influenced by the HVDC system and become unstable. Hence, in the input signal of SSDC, we can eliminate the anti-mode component and only reserve the common-mode component, so that the anti-mode and the common-mode are separated and the SSDC is used for common-mode damping. As in the common-mode, the speed deviation signals of the generators have the definite in-phase relationship; it is totally possible that the SSDC can provide positive damping for all the generators simultaneously.
As has been demonstrated in
Section 3.1, in anti-mode, the oscillation amplitudes of the generators are reversely in proportion to their modal inertias. Denoting the modal inertias of the generators under their common natural frequency as
and
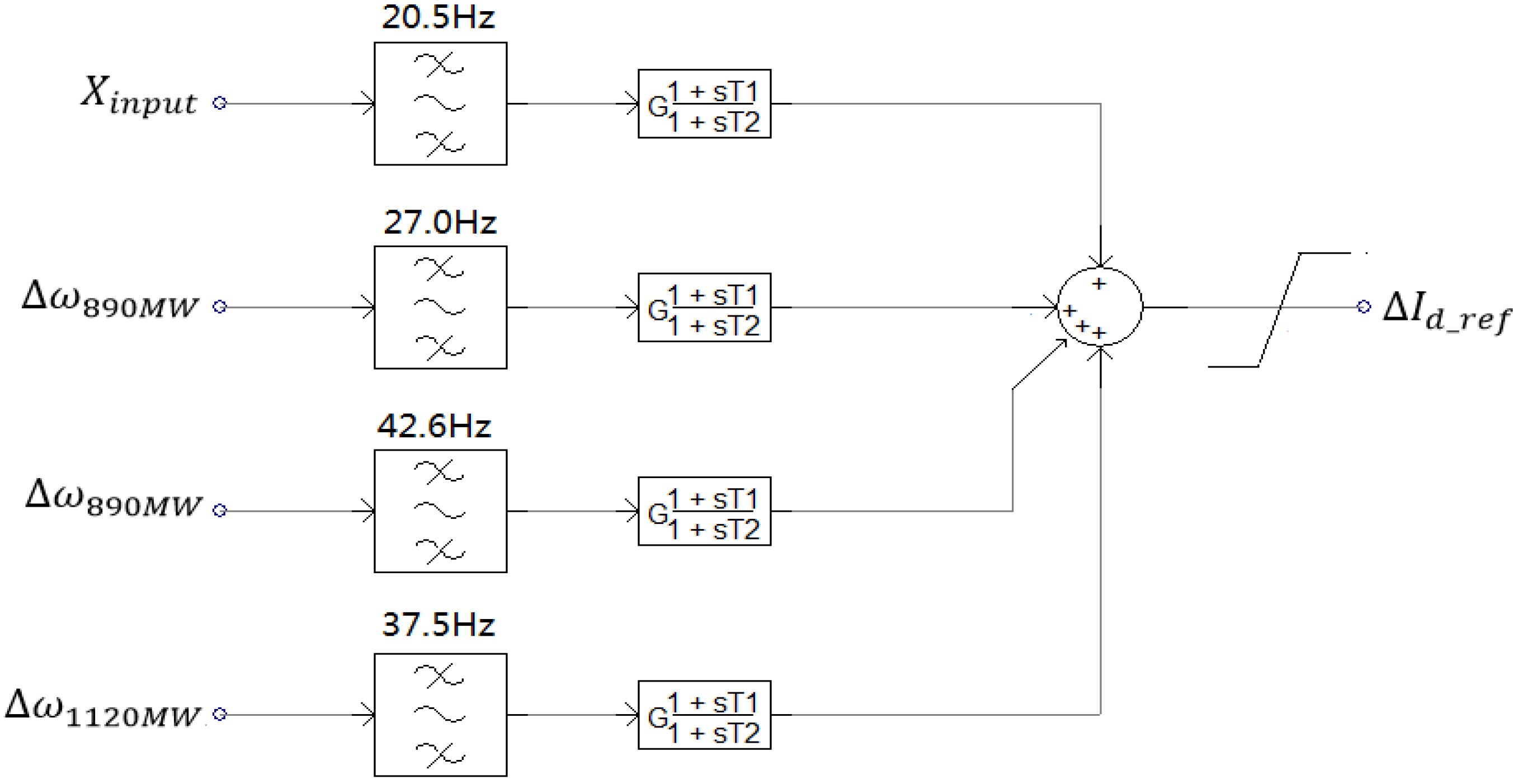
, then the input signal of the SSDC can be taken as:
where
is the coefficient for normalization, in case that a large gain in the signal may bring adverse effect to the system stability. In this input signal, the anti-mode component under the common natural frequency of the generators will be almost eliminated and the common-mode component will be reserved. Apart from the common natural frequency, the oscillation components of the other natural frequencies of the generators are also reserved in their speed deviation signals.
Admittedly, the relationship that the oscillation amplitudes of the generators in anti-mode are reversely in proportion to their modal inertias does not hold exactly. Hence, in the input signal of SSDC, the anti-mode component cannot be eliminated totally. However, the common-mode component will be the dominant part so that the in-phase relationship of the speed deviation signals of the generators will not get be influenced much.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








