1. Introduction
Rechargeable lithium-ion (Li-ion) batteries have recently become attractive for applications in electric vehicles (EVs) because of their high energy density, high power density, long cycle life, and low self-discharge [
1]. Battery cells are connected in series and parallel to satisfy the requirements of high-power applications for EVs because of the insufficient voltage and capacity of a single cell. To maintain optimum battery performance and avoid potential safety hazards, the battery management system (BMS) has become an essential part of a battery pack. The most important function of the BMS is to estimate state of charge (SOC), which is provided to drivers to show remaining mileage, improve power distribution efficiency, and extend the expected life span of batteries [
2,
3]. However, a major disadvantage of the lithium iron phosphate (LiFePO
4) battery is its poor low-temperature performance that is mainly attributed to its intrinsic low electronic conductivity [
4] and the slow diffusion of Li ions [
5,
6], which make accurate modeling of the dynamic behavior of the battery difficult. Consequently, accurately estimating SOC remains challenging and problematic under a wide ambient temperature range.
A wide variety of techniques have been proposed to estimate SOC, and each one has its relative merits. According to literature [
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24], we divide the most commonly used methods into two major categories according to the selected battery model,
i.e., black box- and state-space-model-based on SOC estimation methods. These two types of methods are described as follows.
Black box-model-based methods, including those based on artificial neural networks, fuzzy logic optimization, and support vector machines (SVMs), have been used to estimate SOC online. Kang
et al. [
7] presented a new radial basis function neural network model to eliminate the degradation effect of a battery on the SOC estimation accuracy of the original trained model. Feng
et al. [
8] proposed a fuzzy logic method to estimate the dynamic SOC of lead acid battery online. Juan
et al. [
9] employed SVMs to estimate the SOC of a high-capacity LiFeMnPO
4 battery from an experimental data set. However, the good performance of these methods depends strongly on previously measured training data at selected operating conditions and the suitable training method based on minimum fitting error. In addition, the model training process imposes a heavy computational load and requires a large data set. Consequently, the reliability and applicability of these SOC estimators are subject to challenge.
The methods based on the state-space model with nonlinear filtering algorithms can be further categorized into two types, namely, SOC- and open-circuit voltage (OCV)-based estimators, depending on the variables taken as the state vector. The Kalman filter (KF) technique is commonly selected for state-space estimation because of the advantages of its close-loop nature and capability to regulate estimation error range dynamically. In the SOC-based estimator, SOC that is directly taken as the state vector of the KF algorithm has been widely studied in literature [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. Plett is among the pioneers and representatives who used the KF algorithm to estimate the state vector of a battery state-space model. In his three-paper series [
10,
11,
12], the extended KF (EKF) was applied to estimate the SOC of Li-ion polymer battery (LiPB) based on various battery models. Subsequently, Plett proposed the sigma-point KF, which outperforms EKF in nonlinear estimation applications, to estimate the SOC of LiPB in the latter two papers [
13,
14]. In addition, other nonlinear KF techniques, such as unscented KF [
15,
16], particle filter (PF) [
17], and unscented PF [
18], are widely used to estimate SOC. However, the performance of the SOC-based algorithm has two major flaws. First, the variables of system noise, such as mean value as well as relevance and covariance matrices, should be known in advance. Second, this method strongly depends on the precision of the battery model. Xiong
et al. [
19] used an adaptive EKF (AEKF)-based method to estimate SOC online. This technique improves estimation accuracy by adaptively updating the process and measurement noise covariance. Xing
et al. [
20] considered the temperature dependence of the relationship between OCV and SOC and presented an SOC estimation method based on a temperature model incorporated with an OCV–SOC–temperature table. However, the accuracy of this model at low temperature is obviously less than that at high temperature because battery model parameters are identified with off-line data. The different operating conditions that result in model parameter variances are ignored. In addition, the large error is partially caused by applying the simplified Rint model, which exhibits poor performance at low temperature because of the omission of the relaxation effect.
To overcome the second flaw of SOC-based algorithms, online parameter identification methods have been proposed to update model parameters in real time. OCV-based estimators achieve SOC inference by using the intrinsic relationship of a battery between SOC and some model parameters such as OCV. Xiong
et al. [
21,
22] employed the AEKF algorithm to estimate model parameters and infer SOC. Plett and Pei
et al. [
12,
23] proposed the dual EKF algorithm to conduct a training-free battery parameter/state estimation based on an equivalent circuit model. A common drawback of the aforementioned methods is the omission of cell parameter variances under different temperatures. The methods have also been verified under a narrow set of scenarios without considering different temperatures and loading profiles. The conventional relationship of OCV–SOC is frequently established at room temperature [
24,
25]. However, the relationship varies with differences in temperature and presents various results when a battery is operating at other ambient temperatures. In addition, the effects of overpotential and hysteresis are generally ignored during the process of establishing the relationship. The aforementioned factors lead to remarkable errors in inferring SOC under various temperatures.
This study presents an SOC estimator for Li-ion batteries. The estimator is based on an adaptive online identification of its OCV according to a novel relationship map of OCV
PI–SOC–temperature (OCV
PI–SOC–T) for application in EVs under various temperatures. This paper is organized as follows.
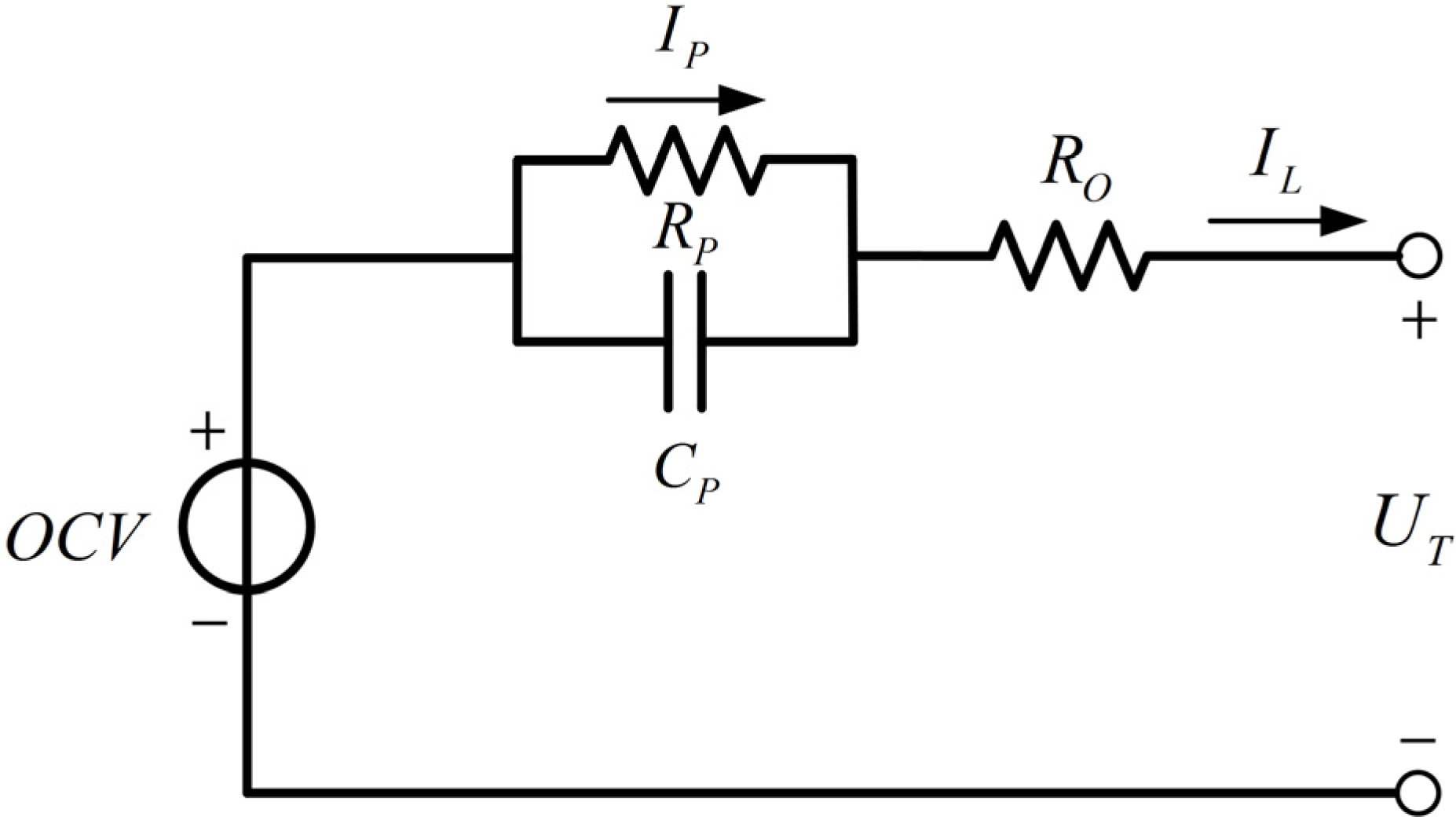
Section 2 describes the structure and discrete state-space formulation of the selected equivalent circuit battery model. In
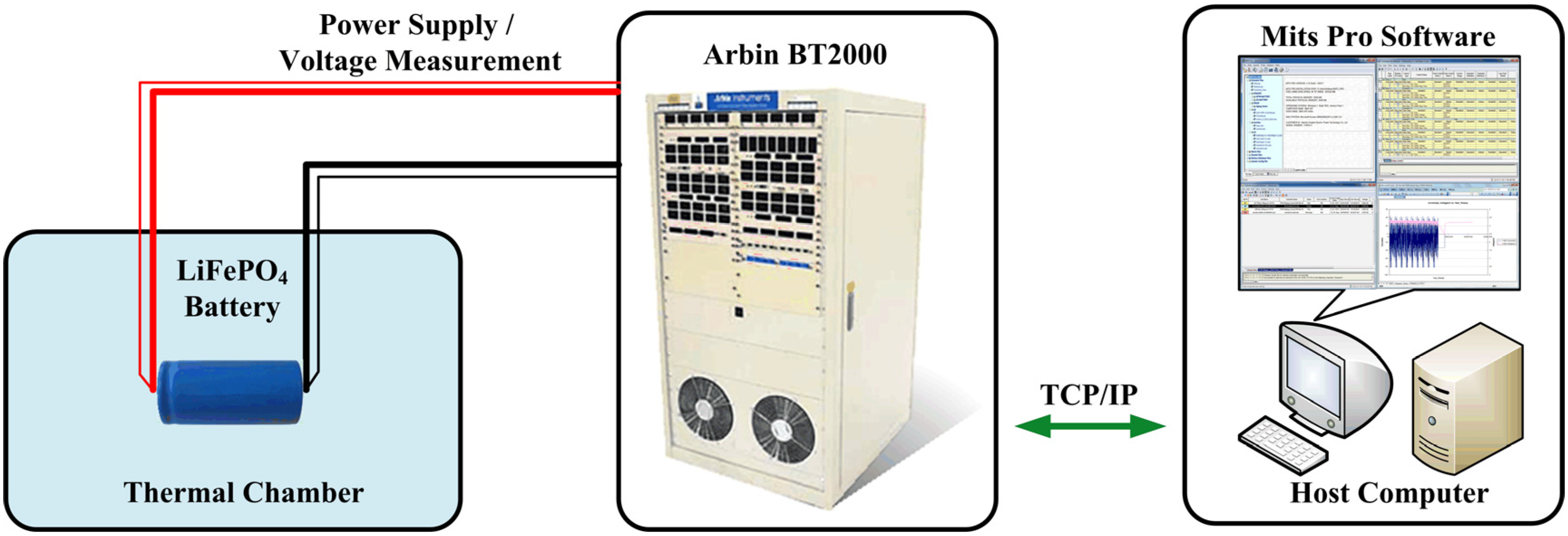
Section 3, the implementation flowchart of the online parameter identification method is proposed based on the review of the adaptive joint EKF (AJEKF). To verify the proposed approach, a 3.3 V/5 Ah LiFePO
4/graphite battery is used to execute a series of characteristic tests. The experiment procedure is described in
Section 4. The simulations and experiments are discussed in
Section 5 to validate the accuracy and reliability of the proposed method on estimating battery parameters. In
Section 6, SOC estimation is conducted according to the OCV
PI–SOC–T map, and effectiveness and adaptability are validated and compared with conventional estimation methods that use OCV
VR–SOC–T and OCV
GT–SOC–T maps. Finally,
Section 7 concludes the paper.
3. Online Estimation of Model Parameters
To guarantee the accurate online identification results of the state and the parameters of the battery model, a reasonable mathematical algorithm is necessary. Online identification suffers from strong nonlinearity, which can be observed from any battery model parameter that has a nonlinear relationship with SOC. In addition, uncertainties attributed to the predetermined variables of system noise, such as mean value, pertinence, and covariance matrix, result in remarkable errors and divergence. The adaptive nonlinear filtering algorithm based on the selected model was developed by exploiting KF and adapted to concurrently estimate both state and parameters. Thus, the AJEKF algorithm was chosen, which can provide an effective means to estimate the state and parameters of a system simultaneously.
3.1. AJEKF Algorithm
KF is a mathematical technique that provides an efficient recursive means to estimate the states of a process to minimize the mean squared error [
10]. Given that KF is only available for linear systems, EKF uses a linearization process at each time step to approximate a nonlinear system through the first-order Taylor series expansion [
19].
The JEKF method, which is based on EKF, was presented by Wan
et al. in 2001 [
27]. This algorithm augments the state vector of a system with its parameters and uses EKF on an augmented system with large matrix operations. The filter has been applied extensively to estimate both state and parameters. The dynamics of the state and parameters within a joint filter are combined to create an augmented system as follows:
where
denotes the parameters that are essentially constant, but may change slowly over time by some driving processes, modeled by a process
of a small fictitious “noise”. To simplify notation, we refer to the vector that comprises the present state and parameters as
and the equation that combines the dynamics of the state and parameters as
. The discrete-time state-space equations are rewritten as follows:
Given that the augmented model of the system and the parameter dynamics are defined, we apply the EKF method. However, a drawback of this method is that the covariances of the process and the measurement noise should be known in advance. In practice, this approach fails to ensure its performance if the initial noise information is inappropriate. Thus, the application of an AJEKF that employs the covariance matching approach to realize robust online identification is discussed in this section.
AJEKF adds further innovation to the algorithm by using the innovation sequence of the filter. The innovation allows parameters
and
to be estimated and updated iteratively from the following equations [
28]:
where
is the innovation covariance matrix based on the innovation sequence
within a moving estimation window with size
.
The calculation steps of the AJEKF algorithm are shown in
Table 1, where
is the Kalman gain matrix;
is defined as the difference between observation
and predicted observation
;
represents an estimation value; and
and
represent prior and posteriori estimation values, respectively. The rest of the steps are similar to those of the standard EKF, but with larger matrix operations.
Table 1.
Summary of AJEKF for estimating state and parameters.
Table 1.
Summary of AJEKF for estimating state and parameters.
| Nonlinear state-space models a: |
| or |
| |
| Definitions: |
| |
| Initialization: |
| For k = 0, set |
| |
| |
| Computation: |
| For k = 1, 2, …; compute: |
| State estimation time update: |
| Error innovation: |
| Error covariance time update: |
| Adaptive law-covariance matching: |
| , |
| Kalman gain matrix: |
| State estimation measurement update: |
| Noise and error covariance measurement update: |
| , |
3.2. Implementing AJEKF on the Battery Model
To estimate the state and parameters of the battery model in the AJEKF framework, state and parameter vectors must be confirmed in the algorithm. The activation polarization current
IP, which depends on both previous short-time information and the present input, is taken as the state vector. All parameters in the battery model, which may not be directly determined through knowledge of the measured input/output of the system and have a slow rate of change, are taken as the parameter vector of the system. State vector
and parameter vector
are defined as follows:
Terminal voltage is selected as the measured system output, and . Battery load current can be regarded as exogenous input .
The state-space equation can be expressed as follows:
In addition,
consists of the OCV, ohmic voltage, and activation polarization voltage. The system measurement equation is as follows:
Each time step
and
, which are respectively the derivation matrices of
and
with respect to system state vector
, are calculated as follows:
6. Online SOC Estimation and Verification
Based on the accurate and reliable online estimation of OCV (one of the parameters in the battery model), online SOC estimation can be realized by using the predetermined off-line OCV–SOC relationship. However, the OCV based on online identification includes a part of the concentration polarization and hysteresis. In addition, the intrinsic relationship of the battery between SOC and OCV is dependent on ambient temperature, which results in errors in estimating SOC. To address these problems, the resulting OCVs in the DST test were used to build the OCVPI–SOC–T relationship map according to a unique SOC point, whereas the FUDS test was used to validate SOC estimation performance.
6.1. Establishing the OCV–SOC Relationship at Different Temperatures
By definition, OCV is the battery voltage under equilibrium conditions,
i.e., voltage when no current is flowing in or out of the battery; hence, no reaction occurs inside the battery [
21]. In another interpretation based on electrochemistry, OCV is the same as the electromotive force (EMF), which is defined by the equilibrium potential difference between positive and negative electrodes when oxidation–reduction reaction rates are equal at the electrodes, and charge transfer and mass transport processes are in dynamic equilibrium [
31]. Based on these two definitions, two mainstream methods for determining OCV, namely, voltage relaxation (VR) [
24,
25] and coulomb titration (CT) [
31,
32], have been discussed in literature. The VR-based method can determine OCV–SOC relationship by resting the battery for a suitable period after charging or discharging (if the temperature is low, then the required rest period is long) under specific SOC intervals. Although a long test time is necessary to obtain a perfect OCV–SOC curve, the OCV values after charging are higher than those after discharging even at the same SOC inference, which accounts for the occurrence of hysteresis during charge and discharge. To ignore the effect of hysteresis, the OCV is generally simplified as the mean value of the charge and discharge curves. For the CT-based approach, the battery is charged and discharged with the same low C-rate current, and the terminal voltage of the cell is considered as a close approximation of the real equilibrium. Given that the polarization and hysteresis effects excited in the cell are neglected, the OCV curve is defined as the average value of the charge and discharge curves.
Unlike sophisticated battery models, such as the enhanced self-correcting model in [
11], the model selected in this study mainly excludes concentration polarization and hysteresis terms. Given the good performance in estimating terminal voltage in the previous section, concentration polarization and hysteresis data were embedded into the results of model parameters to a certain degree. Strictly speaking, the OCV based on online identification includes a part of the concentration polarization and hysteresis, which is defined as parametric identification-based OCV (OCV
PI). Consequently, SOC estimations based on OCV
VR–SOC and OCV
CT–SOC introduce system errors caused by concentration polarization and hysteresis.
Nevertheless, the preceding analyses are enlightening. If we establish the relationship between SOC and OCV using OCV
PI, then we may expect an accurate SOC estimation result. Considering this finding, we proposed a novel OCV–SOC relationship (
i.e., OCV
PI–SOC), which could be developed by combining the online identification of OCV with the true SOC. In this study, true SOC was calculated via coulomb counting based on the load current profiles and coulomb efficiency map. In addition, the initial values of the parameters were set in small offsets based on the results in
Section 5, which ensures an adequate short convergence process. For example,
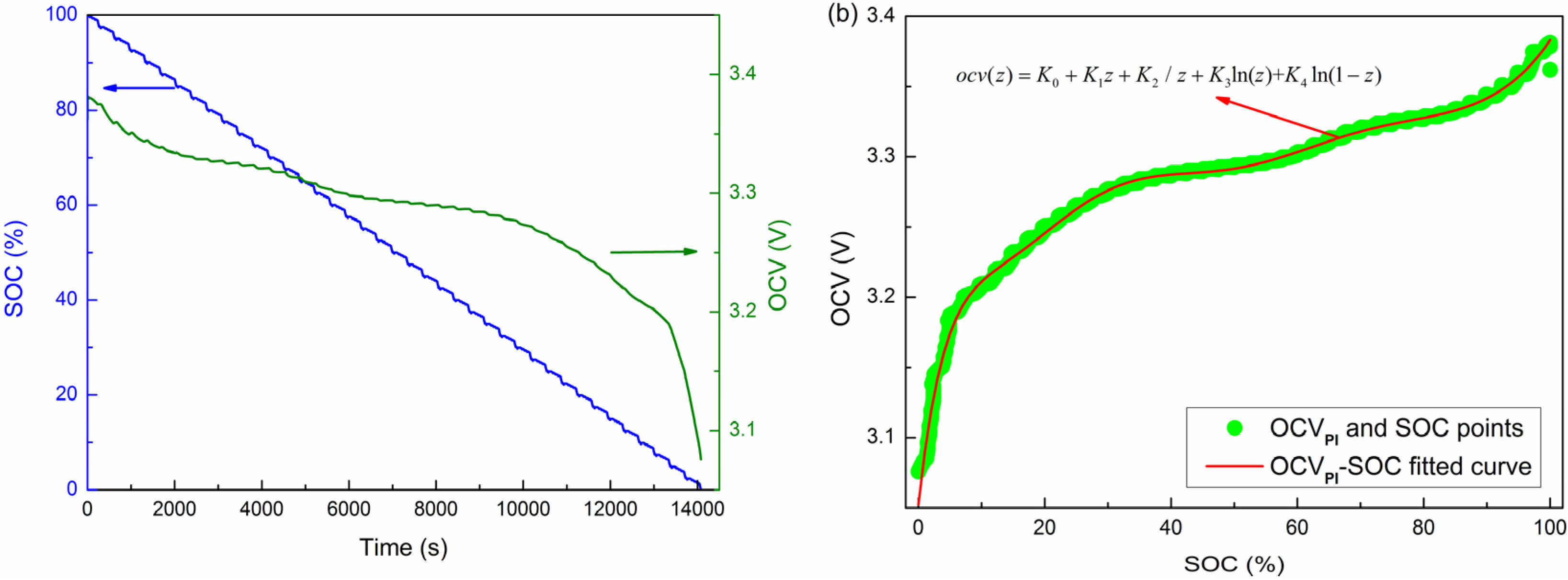
Figure 22a illustrates the online identification of the OCV and the true SOC curves in the DST test at 40 °C. Meanwhile, the scatter plot of OCV and SOC data points as dependent and independent variables, respectively, is depicted in
Figure 22b. The points are substantially nonlinear, and a mathematical description for the electrochemical model in [
11,
19] fitted to the data captures the basic trend in the data.
where
is the SOC.
are the four polynomial coefficients that must fit the OCV–SOC curve. The fitted curve is shown in
Figure 22b.
We have discussed how to develop OCV
PI–SOC only at one specific temperature. Considering the temperature dependence of OCV
PI–SOC curves, the parameters of the OCV function in Equation (18) are represented by a continuous polynomial of temperature (three order), as follows:
where
is the ambient temperature ranging from 0 °C–40 °C.
are the four polynomial coefficients that must fit the OCV
PI–SOC–T relationship map, which is plotted in
Figure 23.
Figure 22.
Establishing OCVPI-SOC relationship in the DST test at 40 °C: (a) online identification of the OCV and the true SOC and (b) the scatter plot and fitted curve of OCVPI and the true SOC.
Figure 22.
Establishing OCVPI-SOC relationship in the DST test at 40 °C: (a) online identification of the OCV and the true SOC and (b) the scatter plot and fitted curve of OCVPI and the true SOC.
Figure 23.
OCVPI–SOC–T relationship map.
Figure 23.
OCVPI–SOC–T relationship map.
For computations involving SOC, the final relationship map of OCVPI–SOC–T was digitized at 201 × 41 points (SOC interval 0.5%, temperature interval 1 °C) and stored in a table. Linear interpolation was used to search for the values in the table.
6.2. Verifying SOC Estimation
To verify the generality of the OCVPI–SOC–T relationship map built by the DST profile, a FUDS test with a sophisticated dynamic current profile was performed. In addition, the OCVVR–SOC–T and OCVCT–SOC–T relationship maps were used to compare the estimations and validate the effectiveness of the proposed OCV–SOC relationship. Furthermore, the verification experiment for SOC estimation was conducted from 0 °C–40 °C at an interval of 10 °C. This test aimed to evaluate the adaptability of the estimation method under different temperatures.
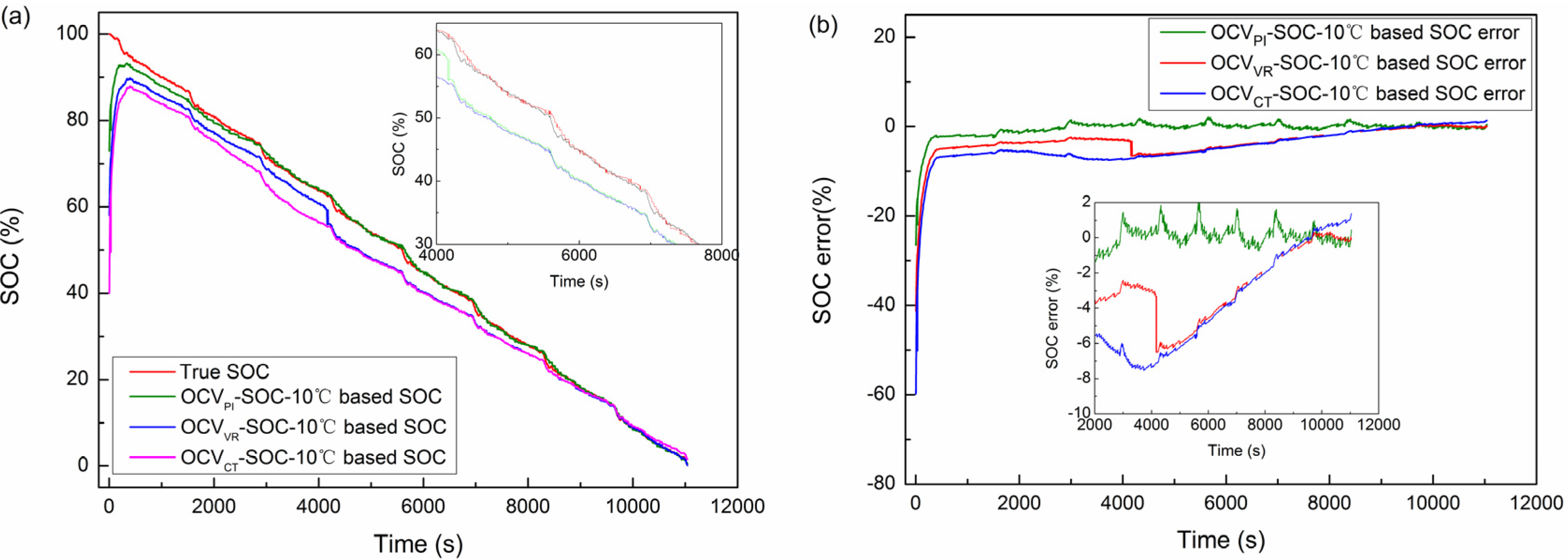
Figure 24 shows the estimation results for SOCs and SOC errors in the DST test at 40 °C.
Figure 24a shows the estimated SOCs for the three OCV–SOC–40 °C relationship maps (
i.e., OCV
PI–SOC–40 °C, OCV
VR–SOC–40 °C, and OCV
CT–SOC–40 °C). The SOC estimation errors between the estimations and the true SOC are given in
Figure 24b. As shown in
Figure 24, the estimated SOC based on the OCV
PI–SOC–40 °C relationship map traces the trajectory of the true SOC accurately. By using the OCV
VR–SOC–40 °C and OCV
CT–SOC–40 °C relationship maps, a large negative deviation from the true SOC was observed. This result was attributed to two reasons. First, the effects of concentration polarization and hysteresis were not included in the two relationship maps, which resulted in OCV
VR and OCV
CT that are larger than OCV
PI in the same SOC. Second, LiFePO
4 batteries exhibit a flat OCV curve in large SOC ranges and a long charge/discharge voltage plateau. Thus, even a small deviation from OCV inference causes a large fluctuation in the estimated SOC.
Figure 24.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 40 °C: (a) SOC and (b) SOC error.
Figure 24.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 40 °C: (a) SOC and (b) SOC error.
Figure 25,
Figure 26,
Figure 27 and
Figure 28 show the comparative profiles of SOCs and SOC errors using the three different OCV–SOC–T relationship maps in the FUDS test from 30 °C–0 °C. The statistical analysis of SOC errors is shown in
Table 2. When the OCV
PI–SOC–T relationship map was selected to estimate SOC overall operating temperatures, the maximum error and the root mean square (RMS) error were less than 4.02% and 2.24%, respectively. Moreover, the errors of the estimated SOC increase as temperature decreases because the accuracy of voltage estimation at low temperature is slightly less than that at high temperature, as mentioned in
Section 5. The large voltage estimation error at low temperature is partially embedded into the result of OCV identification at low temperature. By using the OCV
VR–SOC–T and OCV
CT–SOC–T relationship maps, the maximum and RMS errors were both larger than those based on the OCV
PI–SOC–T map at each temperature because of the large voltage of concentration polarization and hysteresis at low temperature.
Figure 25.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 30 °C: (a) SOC and (b) SOC error.
Figure 25.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 30 °C: (a) SOC and (b) SOC error.
Figure 26.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 20 °C: (a) SOC and (b) SOC error.
Figure 26.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 20 °C: (a) SOC and (b) SOC error.
Figure 27.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 10 °C: (a) SOC and (b) SOC error.
Figure 27.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 10 °C: (a) SOC and (b) SOC error.
Figure 28.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 0 °C: (a) SOC and (b) SOC error.
Figure 28.
Estimated comparison using the three different OCV–SOC–T relationship maps in the FUDS test at 0 °C: (a) SOC and (b) SOC error.
Table 2.
List of statistics of SOC estimation errors with different OCV–SOC–T relationship maps.
Table 2.
List of statistics of SOC estimation errors with different OCV–SOC–T relationship maps.
| Temperature (°C) | Maximum Error (%) | RMS Error (%) |
|---|
| OCVPI-SOC-T | OCVVR-SOC-T | OCVCT-SOC-T | OCVPI-SOC-T | OCVVR-SOC-T | OCVCT-SOC-T |
|---|
| 40 °C | 1.3403 | 4.9674 | 5.4576 | 0.6408 | 2.6458 | 3.1622 |
| 30 °C | 1.4709 | 5.2423 | 6.0818 | 0.6823 | 2.3449 | 3.6874 |
| 20 °C | 1.6288 | 5.9237 | 6.6250 | 0.8019 | 2.6858 | 4.0969 |
| 10 °C | 2.4455 | 6.5152 | 7.5307 | 1.2857 | 3.3993 | 4.6280 |
| 0 °C | 4.0177 | 8.8833 | 9.4587 | 2.2417 | 5.7586 | 5.5920 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























