
Minimization of Cogging Force in Fractional-Slot Permanent Magnet Linear Motors with Double-Layer Concentrated Windings


Abstract
:1. Introduction
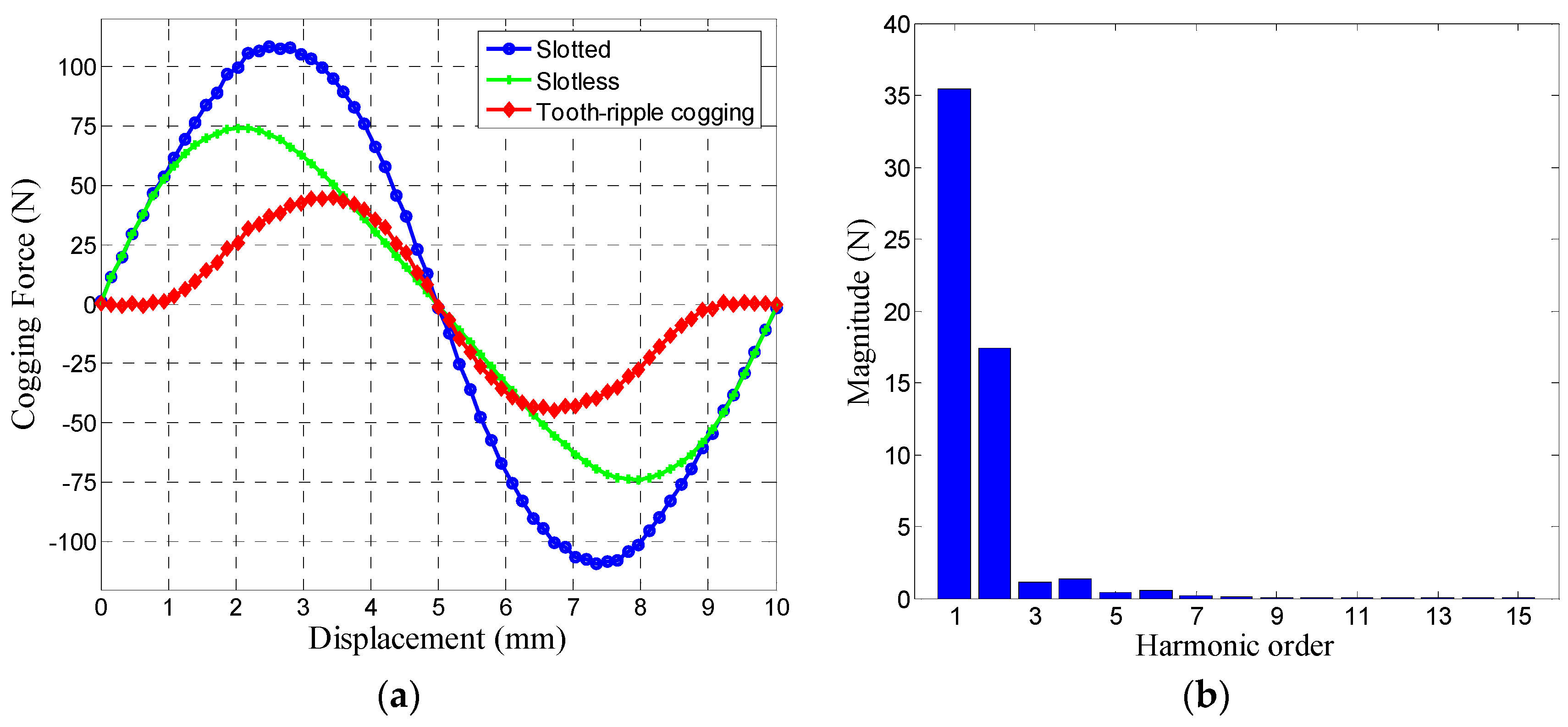
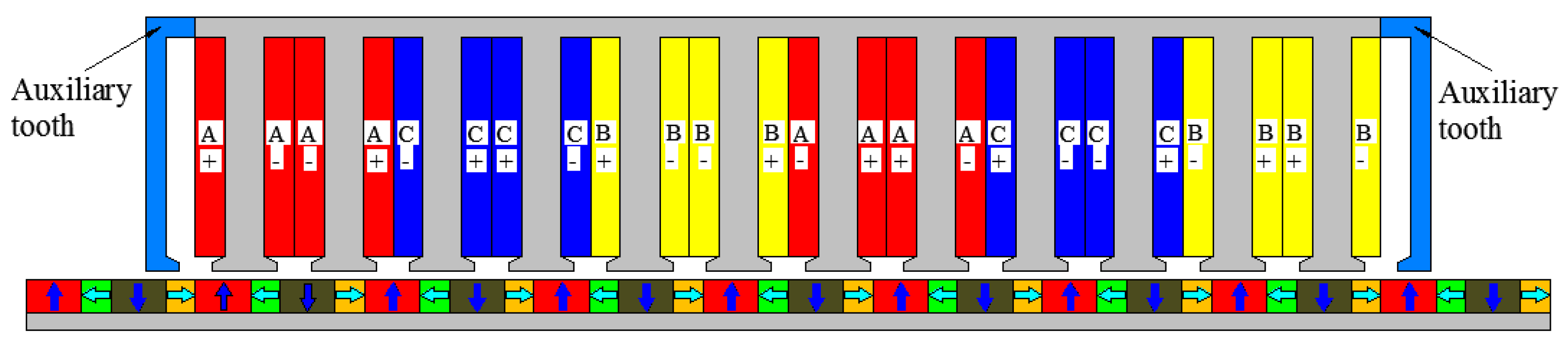
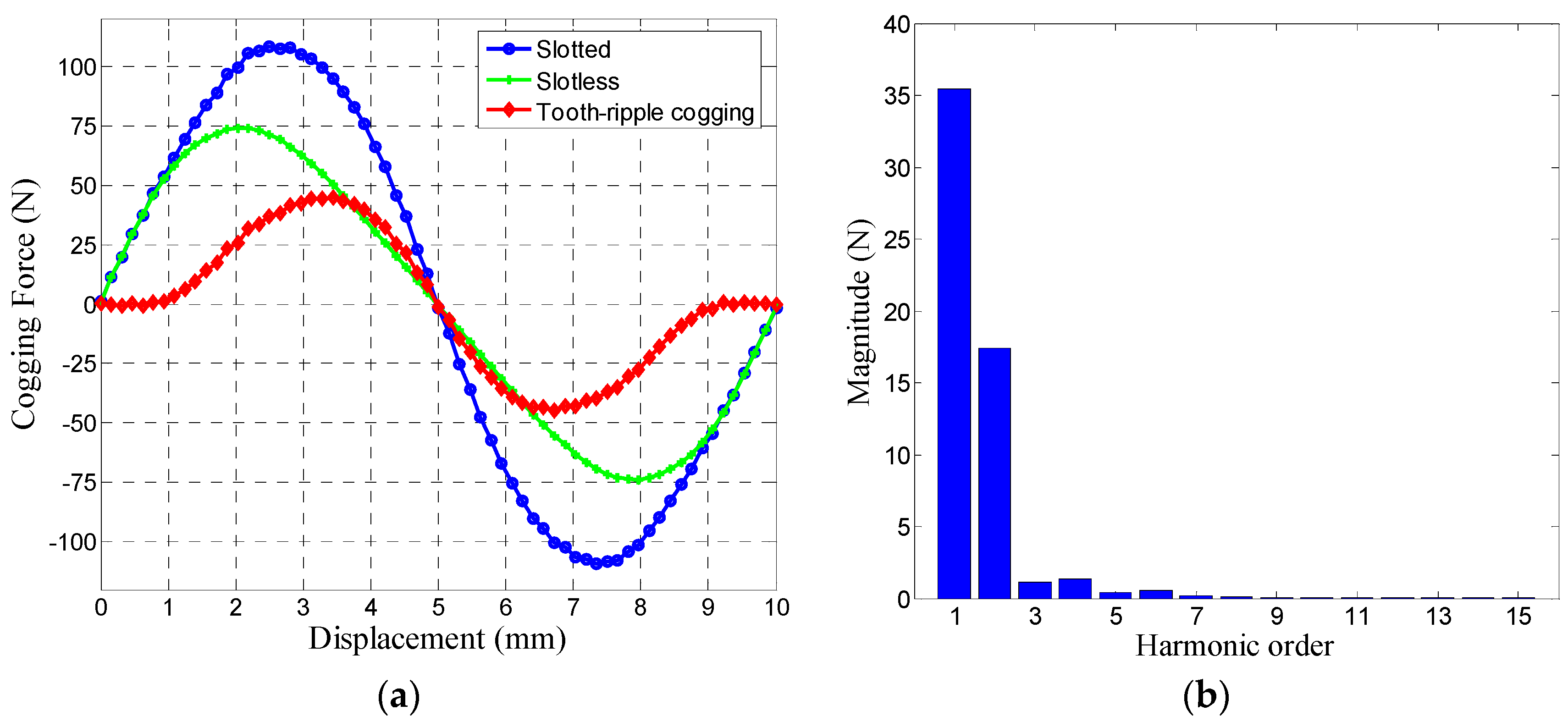
2. Tooth-Ripple Cogging Force in the Double-Layer Concentrated-Winding Design
3. Elimination of the 1st-Order Harmonic Cogging Force
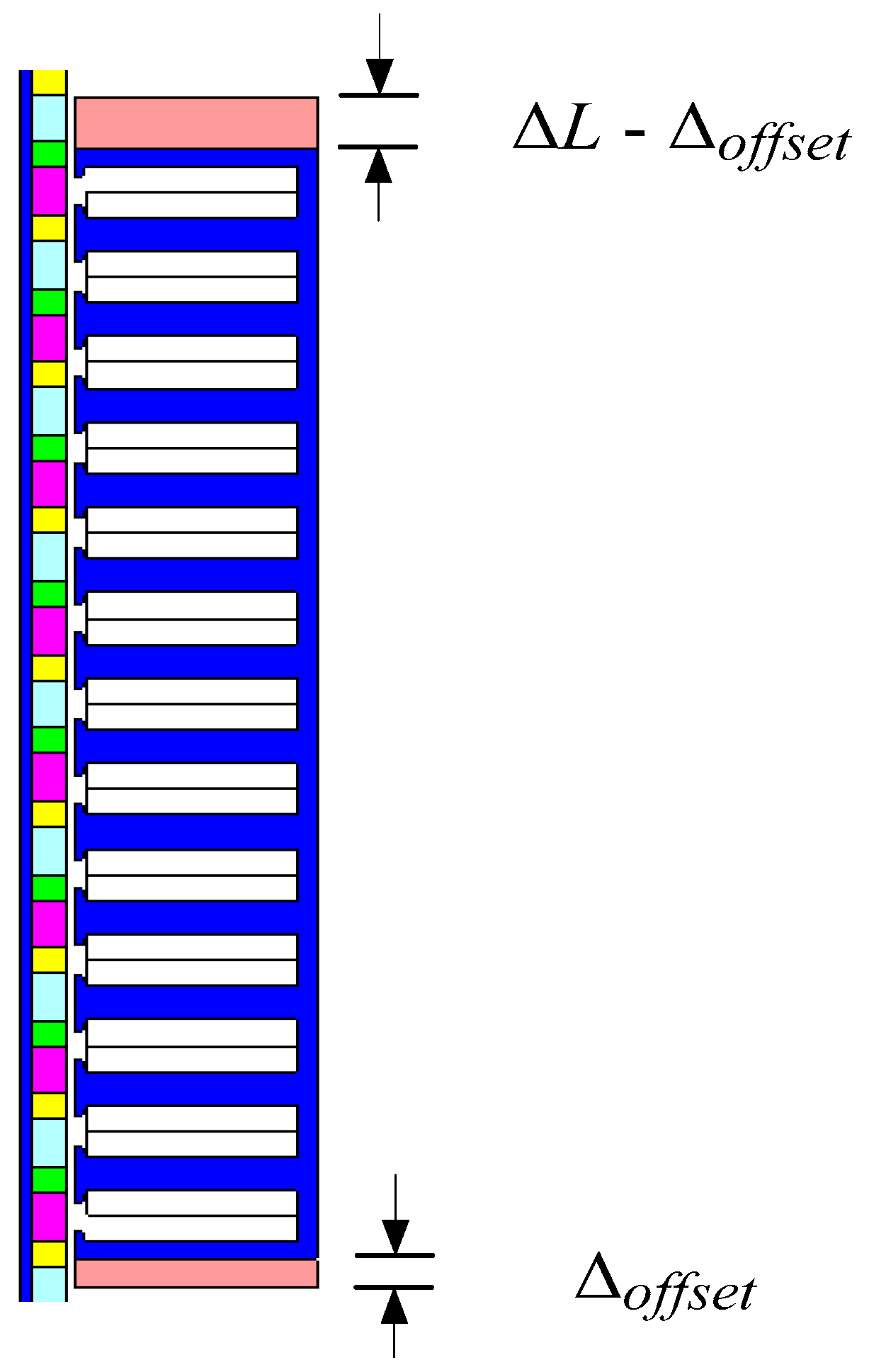
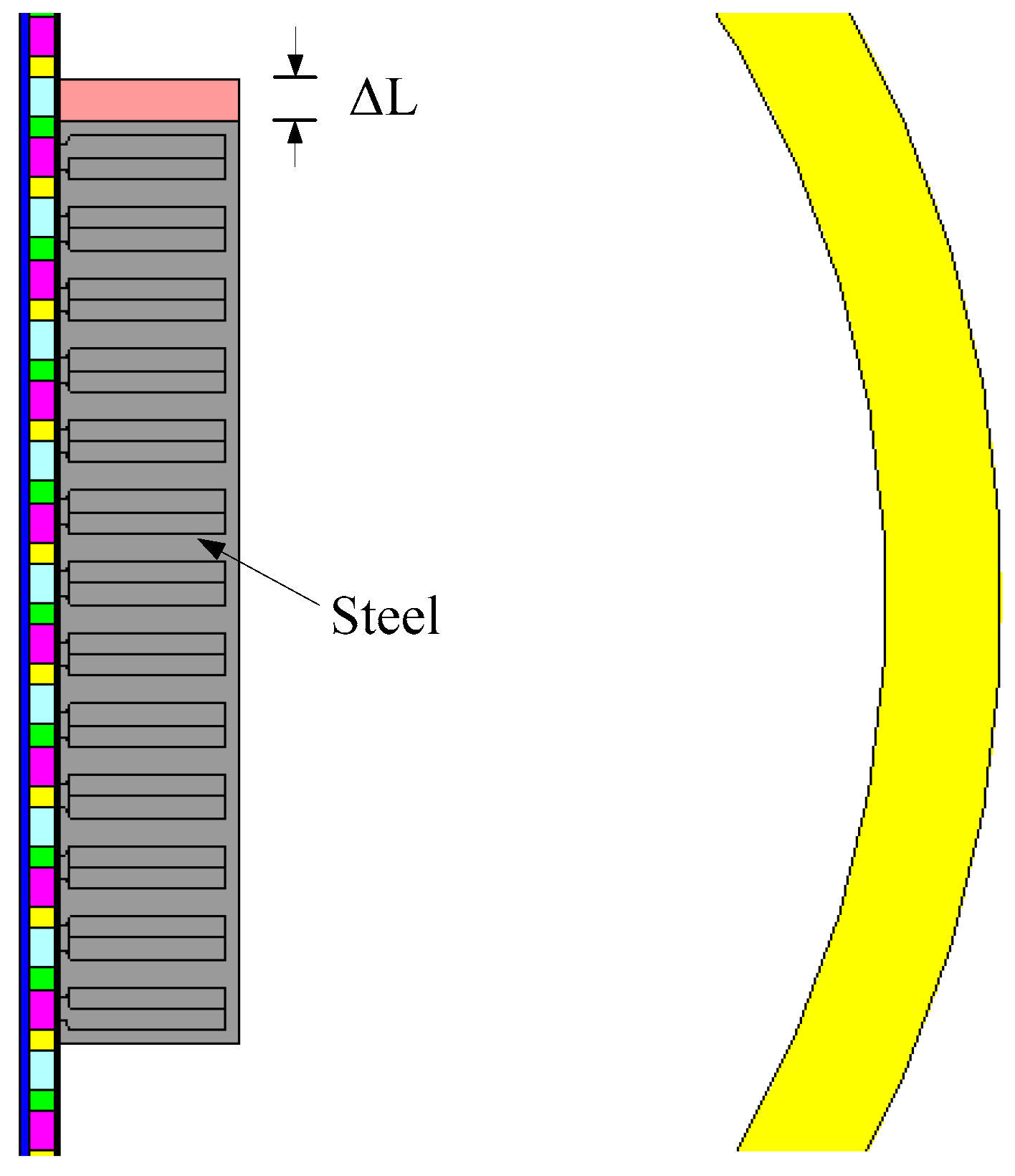
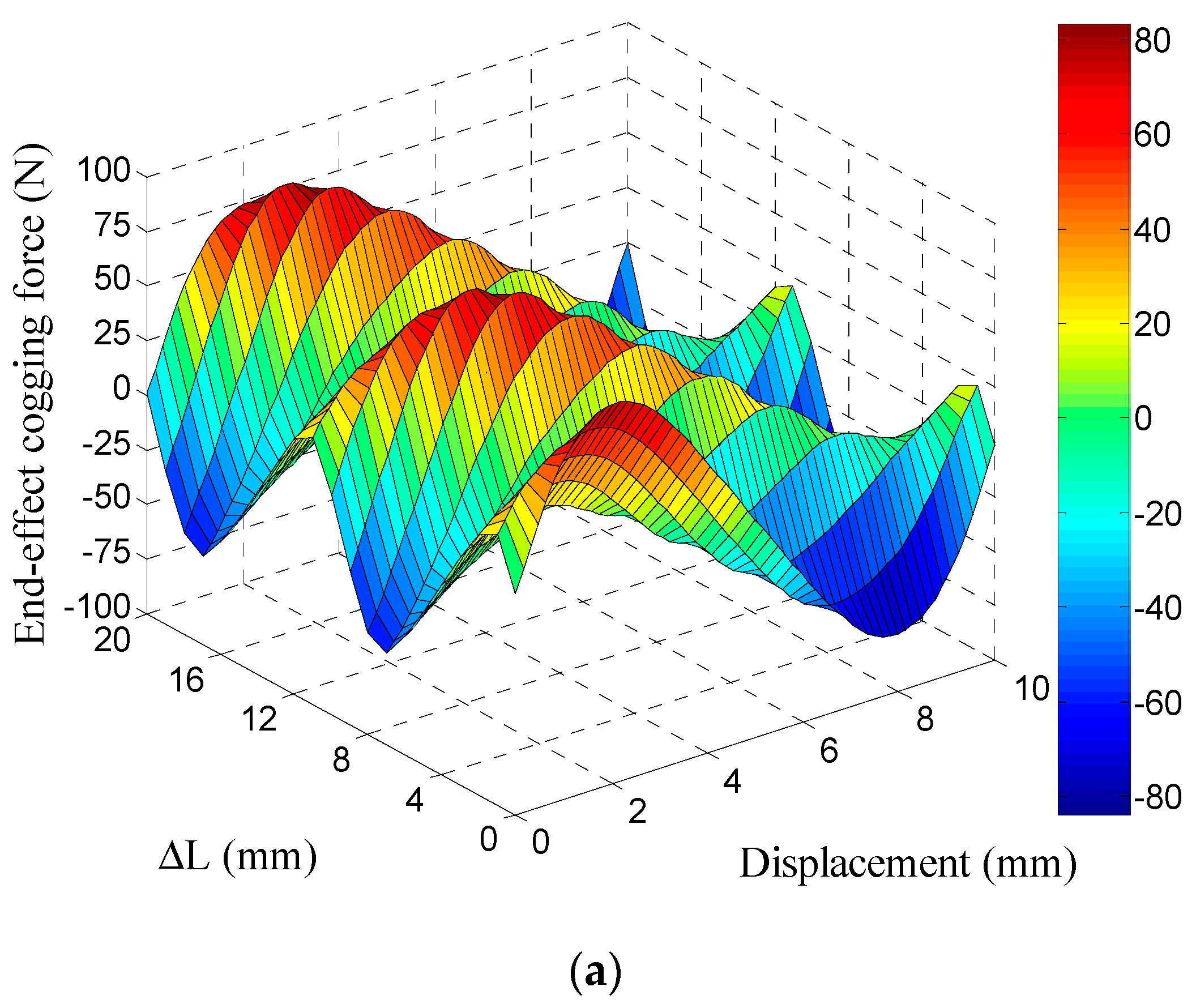
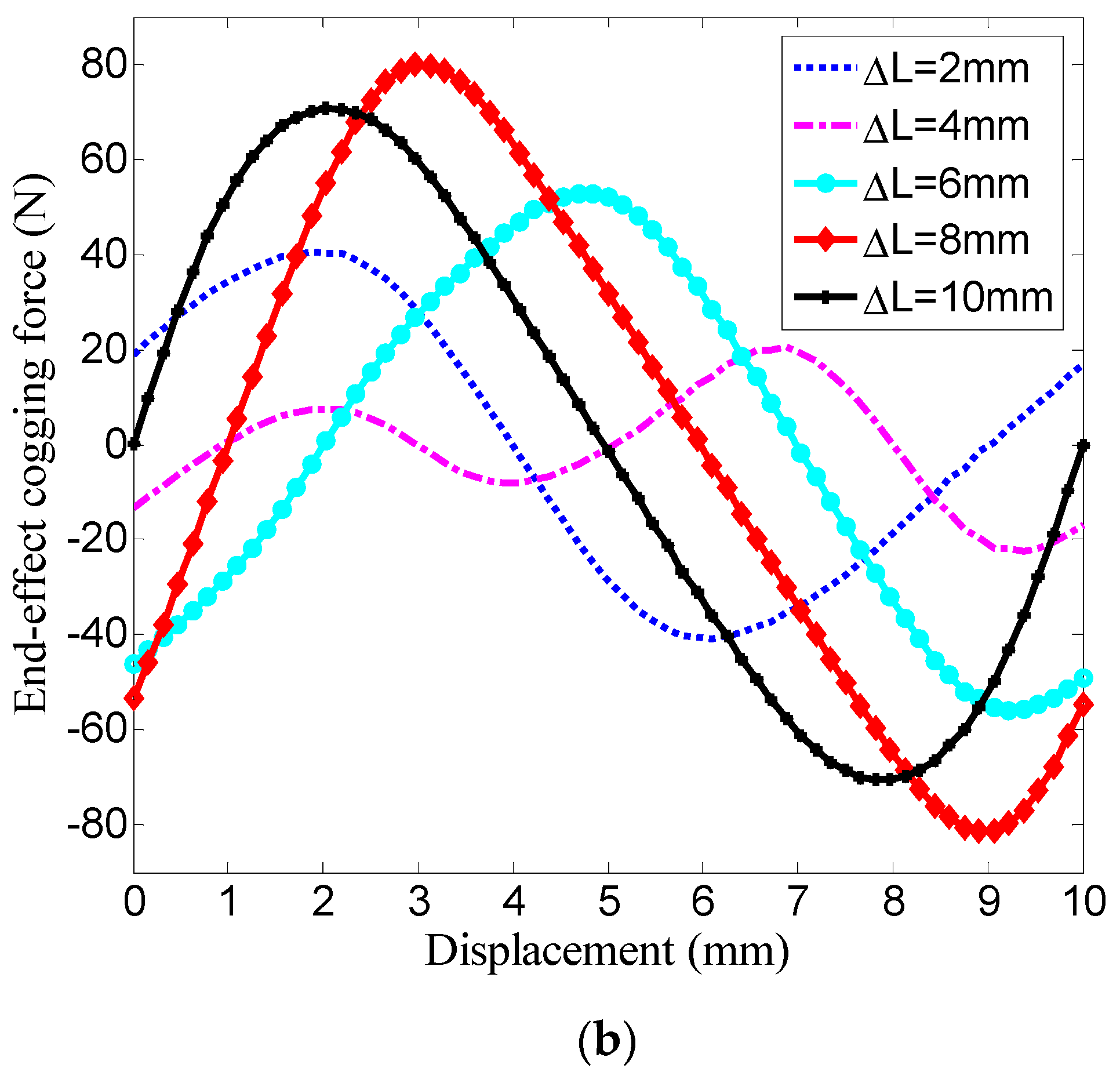
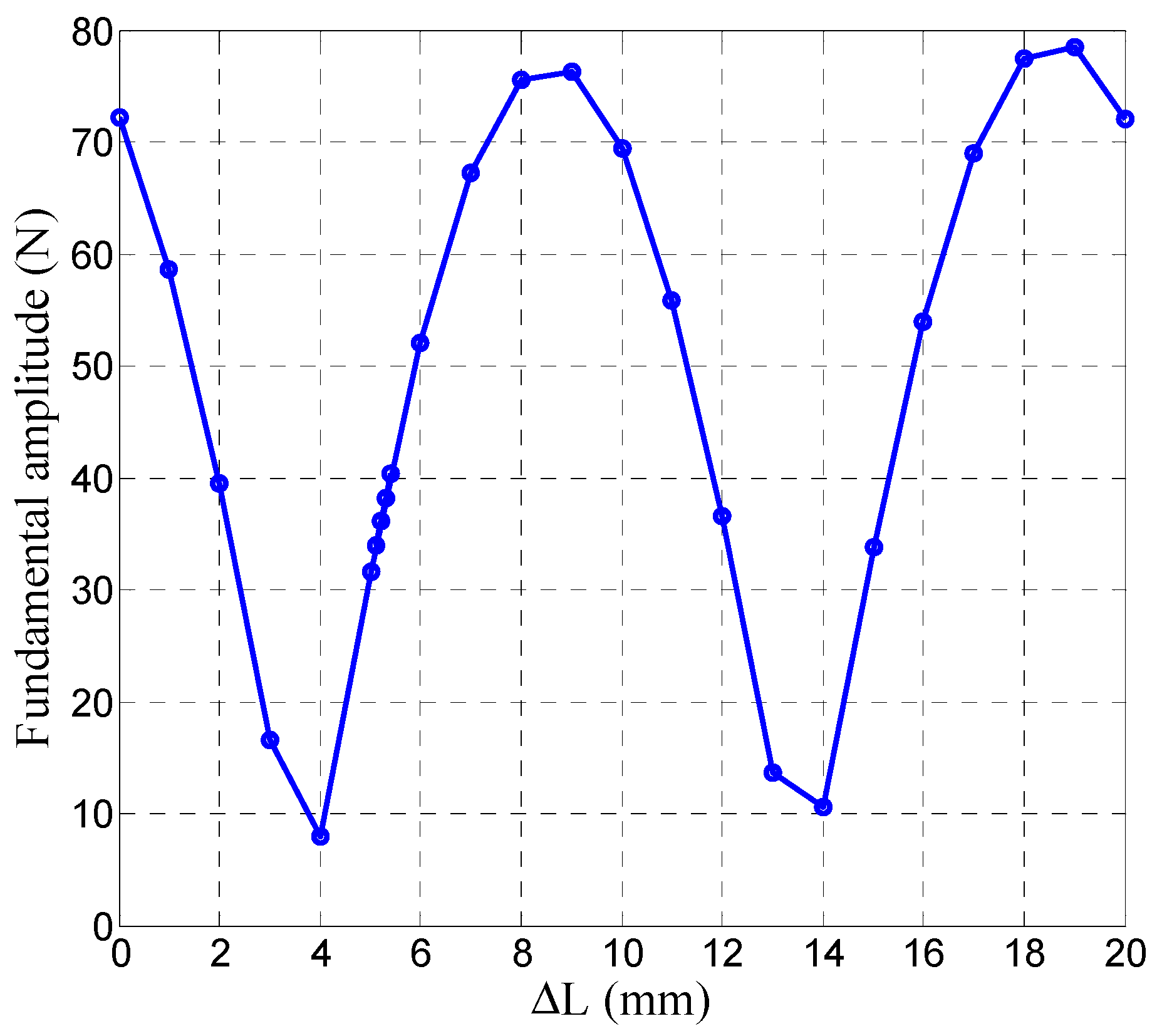
3.1. Influence of the Armature Core Length on the End-Effect Cogging Force
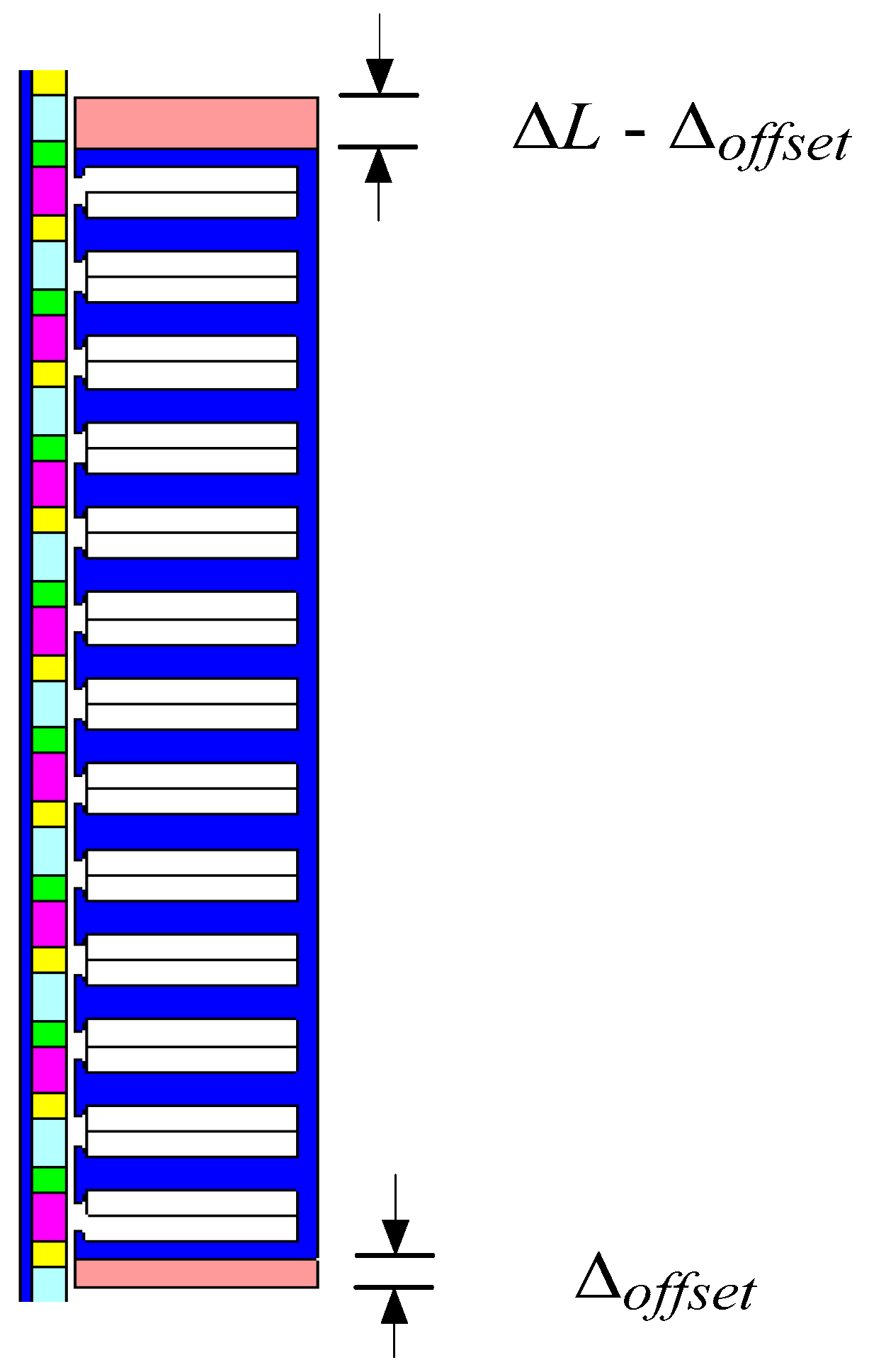
3.2. Phase Adjustment by Offsetting the Auxiliary Core
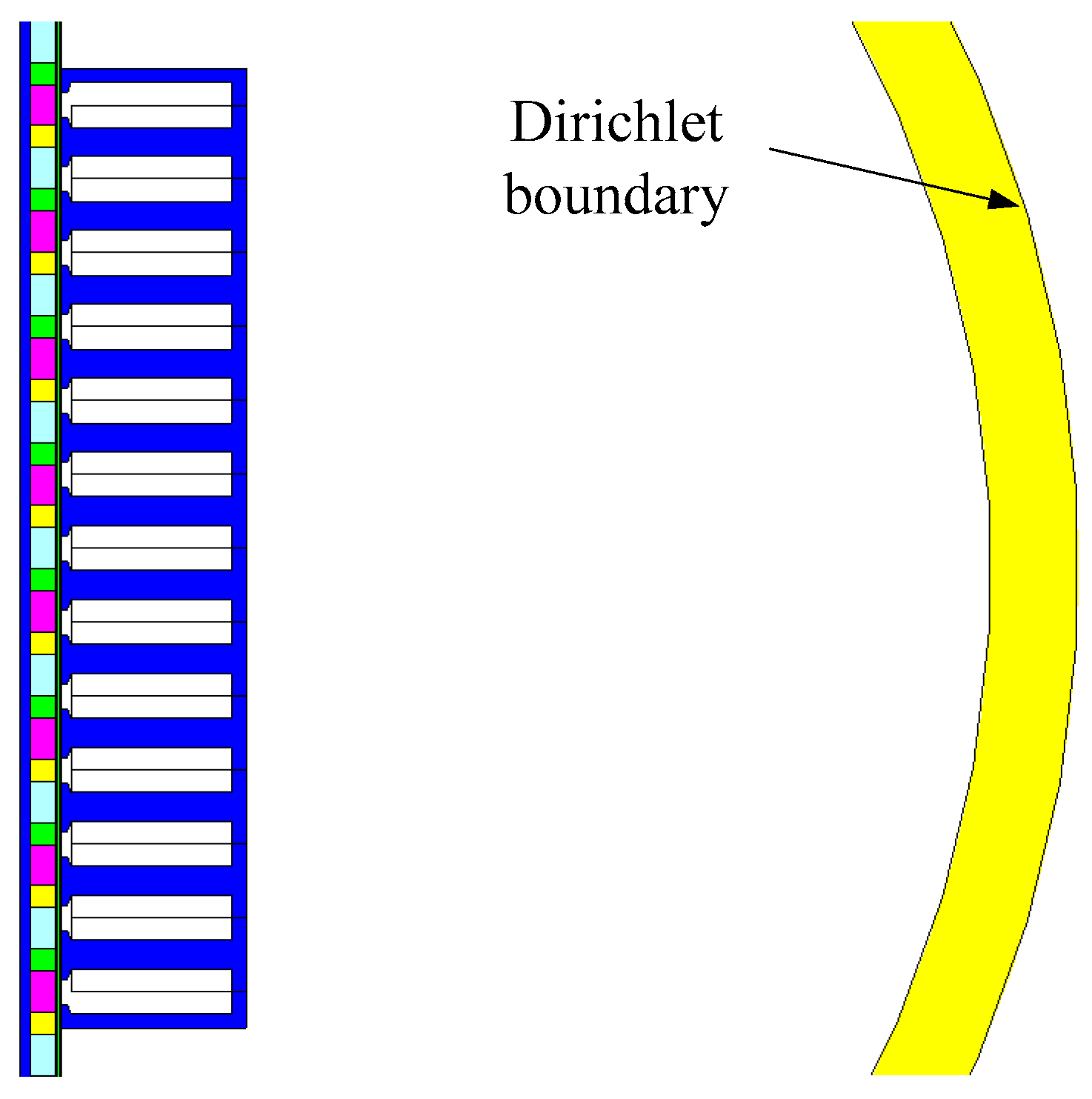
3.3. Validations
4. Elimination of the 2nd-Order Harmonic Cogging Force
4.1. Analytical Analysis
- (1).
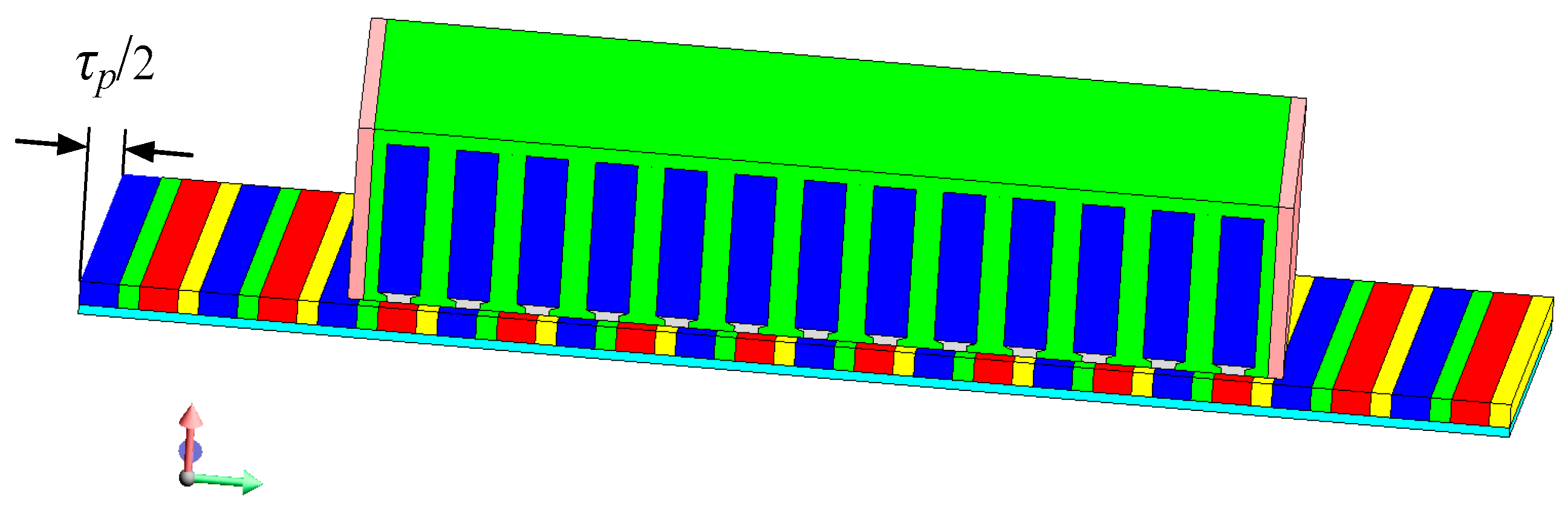
- When n = 2, 4, 6, ..., sin(nπ/2) = 0, which means that the even-order components of the cogging forces can be eliminated by skewing the magnets by τp/2.
- (2).
- The magnitudes of the other harmonic cogging-forces can be brought down with a factor (2/nπ).
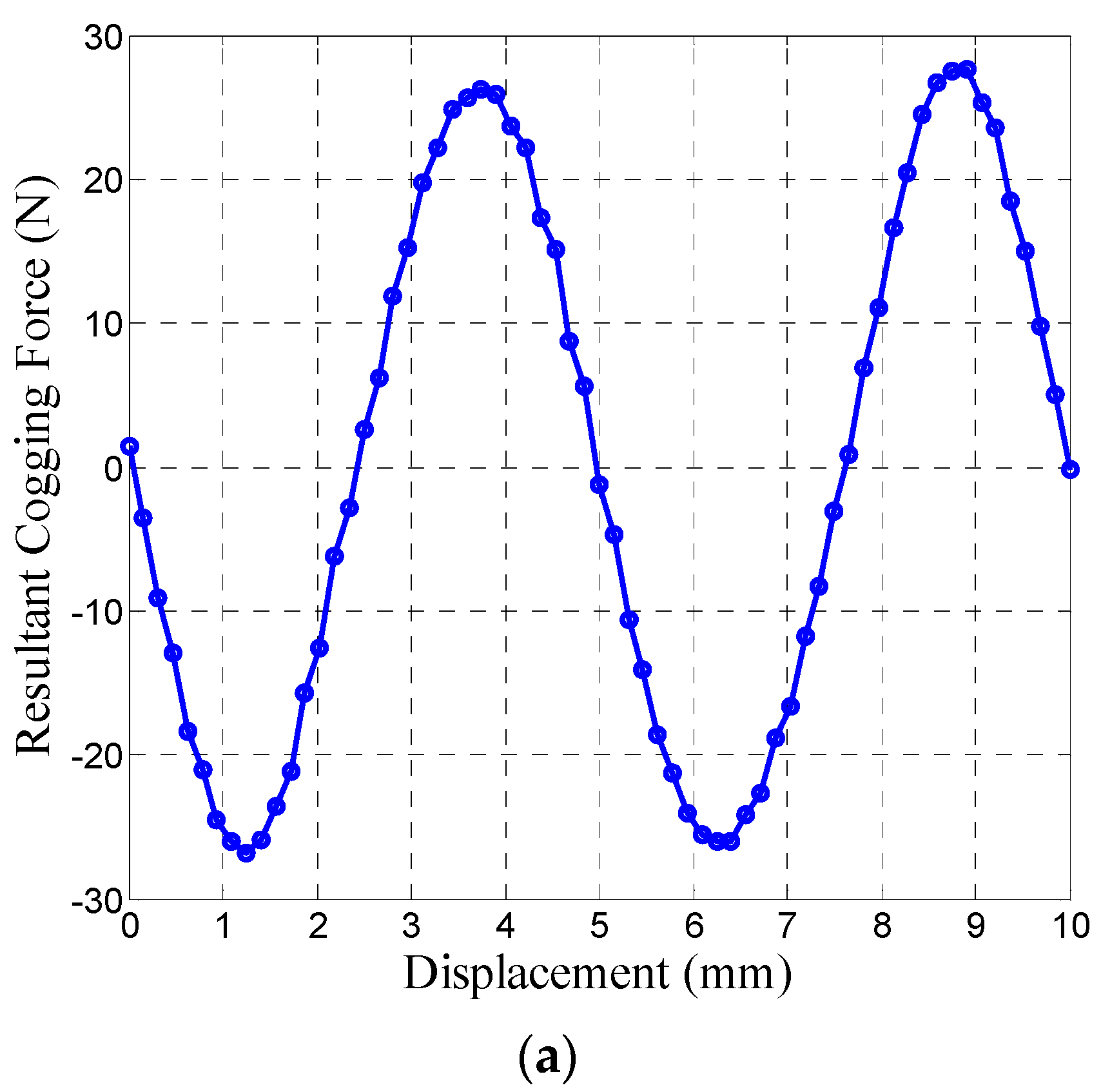
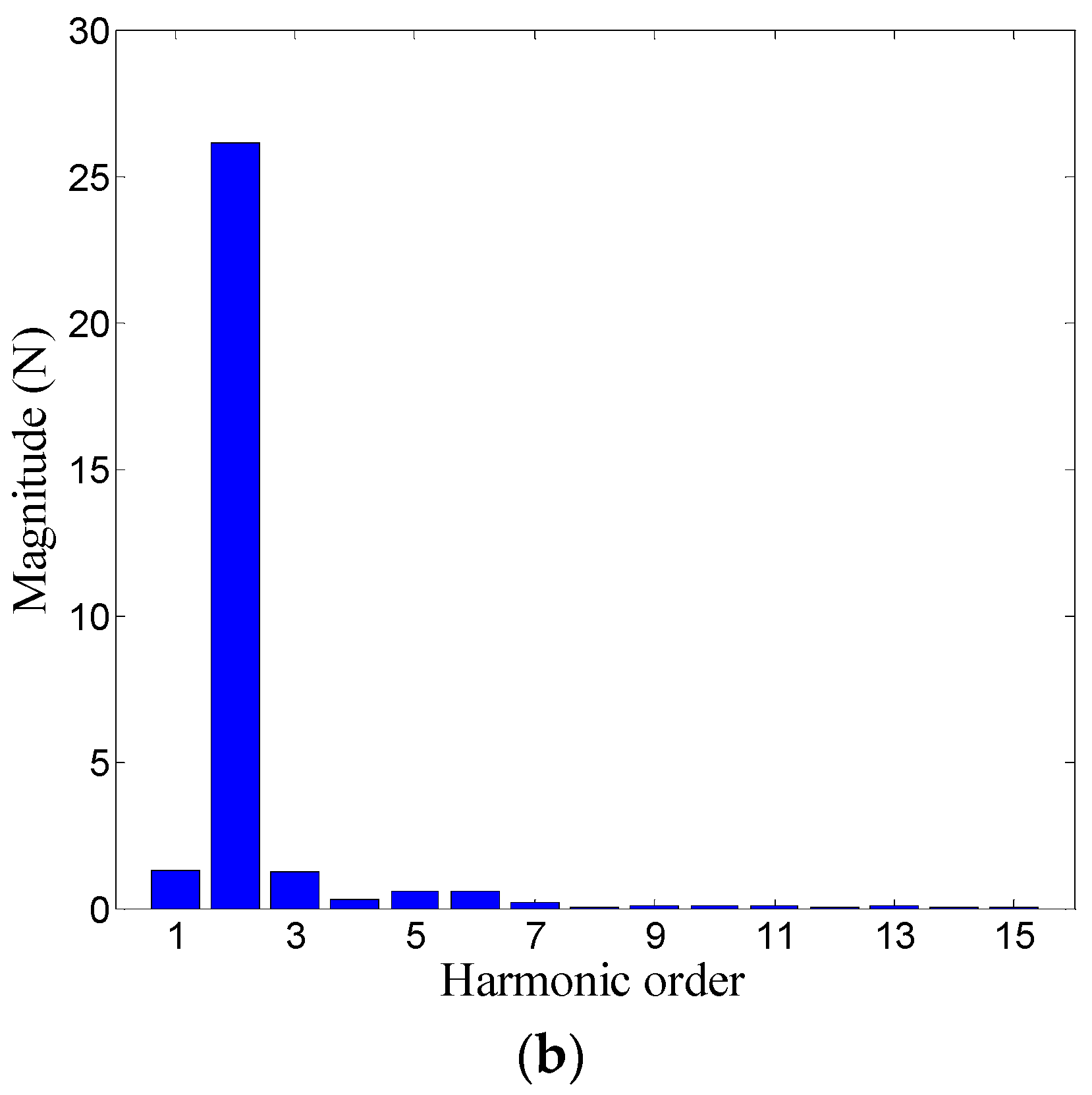
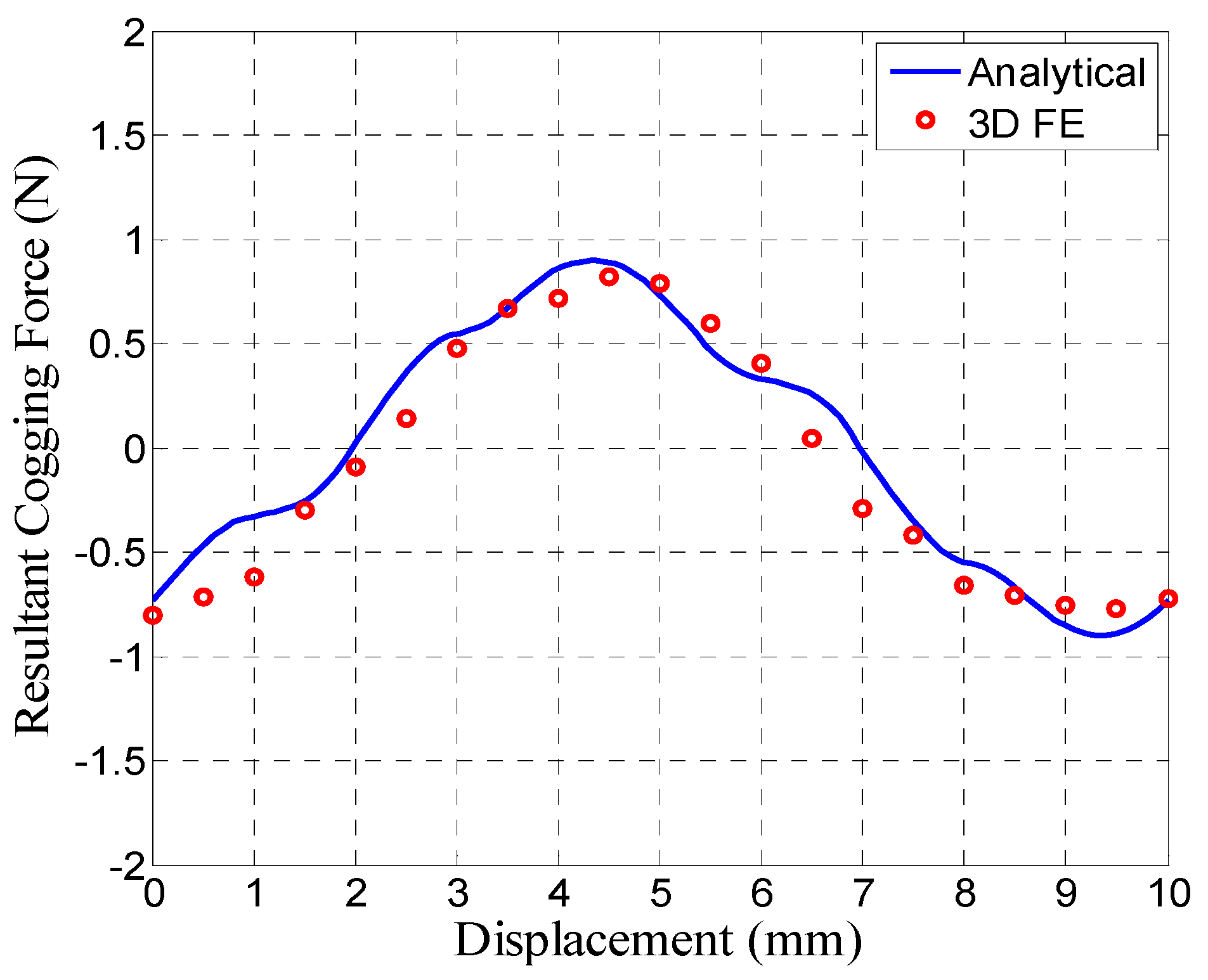
4.2. Validations
5. Practical Considerations
5.1. Skewing Magnets by τp—A High Price
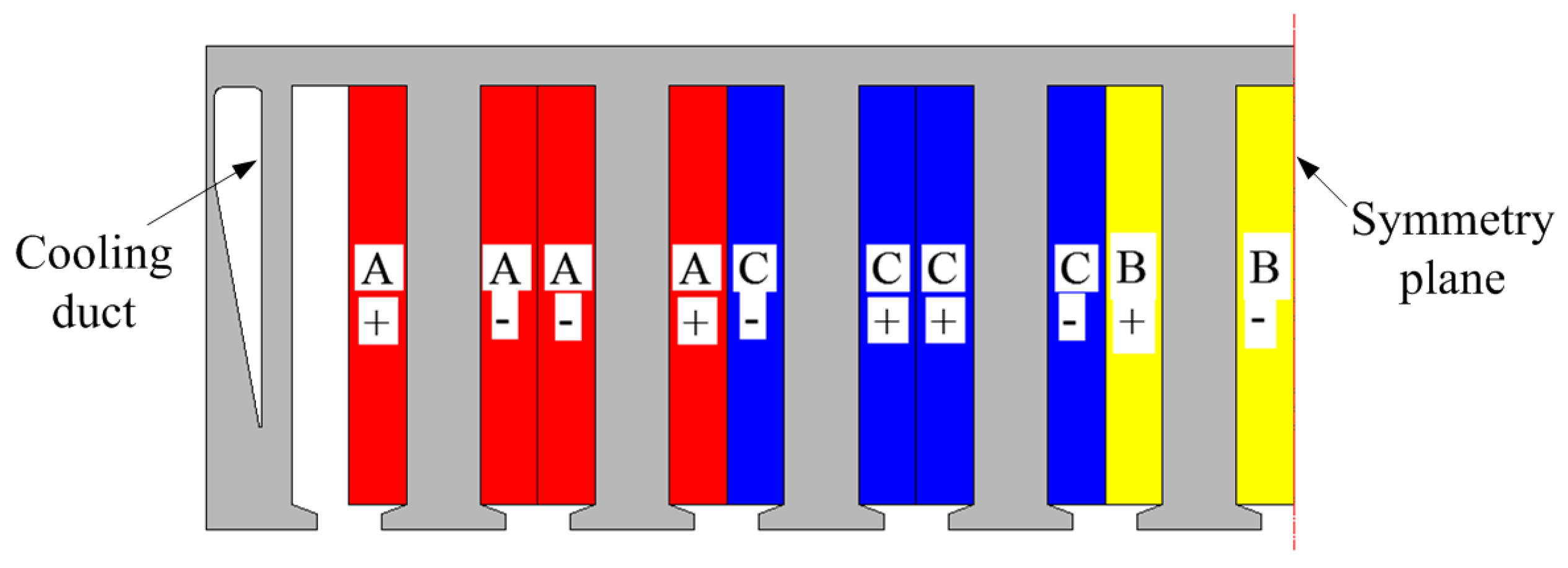
5.2. Incorporation of Cooling Ducts into Armature Cores
6. Conclusions
- (1).
- The PMLM with double-layer concentrated windings exhibits significant tooth-ripple cogging force even with the fractional-slot technology.
- (2).
- By combining the optimized design of armature core dimensions with magnet skewing, the 1st- and 2nd-order cogging forces have been eliminated, and in this way, the resultant cogging force can be greatly minimized.
- (3).
- The approach described in the paper is capable of reducing the cogging force in an effective way, which is conducive to the expanded use of PMLMs in a range of applications. Such techniques can be readily extended to other linear PM machines.
Acknowledgment
Author Contributions
Conflicts of Interest
References
- Kou, B.; Luo, J.; Yang, X.; Zhang, L. Modelling and analysis of a novel transverse-flux flux-reversal linear motor for long-stroke application. IEEE Trans. Ind. Electron. 2016, 10, 6238–6248. [Google Scholar] [CrossRef]
- Teo, T.J.; Zhu, H.; Pang, C.K. Modeling of a two degrees-of-freedom moving magnet linear motor for magnetically levitated positioners. IEEE Trans. Magn. 2014, 12, 8300512. [Google Scholar] [CrossRef]
- Ji, J.; Yan, S.; Zhao, W.; Liu, G.; Zhu, X. Minimization of cogging force in a novel linear permanent-magnet motor for artificial hearts. IEEE Trans. Magn. 2013, 7, 3901–3904. [Google Scholar] [CrossRef]
- Gandhi, A.; Parsa, L. Thrust optimization of a flux-switching linear synchronous machine with yokeless translator. IEEE Trans. Magn. 2013, 4, 1436–1443. [Google Scholar] [CrossRef]
- Tavana, N.R.; Shoulaie, A. Pole-shape optimization of permanent-magnet linear synchronous motor for reduction of thrust ripple. Energy Convers. Manag. 2011, 52, 349–354. [Google Scholar] [CrossRef]
- Wang, Q.; Zou, J.M.; Zou, J.B.; Zhao, M. Analysis and computer-aided simulation of cogging force characteristic of a linear electromagnetic launcher with tubular transverse flux machine. IEEE Trans. Plasma Sci. 2011, 1, 157–161. [Google Scholar] [CrossRef]
- Kim, Y.J.; Watada, M.; Dohmeki, H. Reduction of the cogging force at the outlet edge of a stationary discontinuous primary linear synchronous motor. IEEE Trans. Magn. 2007, 1, 40–45. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xia, Z.P.; Howe, D.; Mellor, P.H. Reduction of cogging force in slotless linear permanent magnet motors. IEE Proc. 1997, 4, 277–282. [Google Scholar] [CrossRef]
- Inoue, M.; Sato, K. An approach to a suitable stator length for minimizing the detent force of permanent magnet linear synchronous motors. IEEE Trans. Magn. 2000, 4, 1890–1893. [Google Scholar] [CrossRef]
- Zhu, W.; Lee, S.; Chung, K.; Cho, Y. Investigation of auxiliary poles design criteria on reduction of end effect of detent force for PMLSM. IEEE Trans. Magn. 2009, 6, 2863–2866. [Google Scholar] [CrossRef]
- Wang, J.; Inoue, M.; Amara, Y.; Howe, D. Cogging-force-reduction techniques for linear permanent-magnet machines. IEE Proc. 2005, 3, 731–738. [Google Scholar] [CrossRef]
- Jung, I.; Hur, J.; Hyun, D. Performance analysis of skewed PM linear synchronous motor according to various design parameters. IEEE Trans. Magn. 2001, 5, 365–3657. [Google Scholar]
- Hor, P.J.; Zhu, Z.Q.; Howe, D.; Jones, J. Minimization of cogging force in a linear permanent magnet motor. IEEE Trans. Magn. 1998, 5, 3544–3547. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, J. Assessment of cogging-force-reduction techniques applied to fractional-slot linear permanent magnet motors equipped with non-overlapping windings. IET Electr. Power Appl. 2016, 8, 697–705. [Google Scholar] [CrossRef]
- Zhao, S.; Tan, K.K. Adaptive feed forward compensation of force ripples in linear motors. Control Eng. Pract. 2005, 13, 1081–1092. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Cappello, A. Back EMF improvement and force ripple reduction in PM linear motor drives. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; pp. 3372–3377.
- Jahns, T.M.; Soong, W.L. Pulsating torque minimization techniques for permanent magnet AC motor drives—A review. IEEE Trans. Ind. Elec. 1996, 2, 321–330. [Google Scholar] [CrossRef]
- Hwang, C.C.; Li, P.L.; Liu, C.T. Optimal design of a permanent magnet linear synchronous motor with low cogging force. IEEE Trans. Magn. 2012, 2, 1036–1042. [Google Scholar] [CrossRef]
- Youn, S.W.; Lee, J.J.; Yoon, H.S.; Koh, C.S. A new cogging-free permanent-magnet linear motor. IEEE Trans. Magn. 2008, 7, 1785–1790. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Data | Parameters | Data |
|---|---|---|---|
| Rated force (N) | 250 | Pole No. | 14 |
| Pole pitch (mm) | 10 | Slot No. | 12 |
| Permanent magnets (PM) thickness (mm) | 4 | PM remanence (T) | 1.05 |
| Air-gap length (mm) | 1.0 | PM relative permeability | 1.05 |
| Slot opening width (mm) | 4 | Halbach ratio | 0.65 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Zhao, B.; Zou, J.; Li, Y. Minimization of Cogging Force in Fractional-Slot Permanent Magnet Linear Motors with Double-Layer Concentrated Windings. Energies 2016, 9, 918. https://doi.org/10.3390/en9110918
Wang Q, Zhao B, Zou J, Li Y. Minimization of Cogging Force in Fractional-Slot Permanent Magnet Linear Motors with Double-Layer Concentrated Windings. Energies. 2016; 9(11):918. https://doi.org/10.3390/en9110918
Chicago/Turabian StyleWang, Qian, Bo Zhao, Jibin Zou, and Yong Li. 2016. "Minimization of Cogging Force in Fractional-Slot Permanent Magnet Linear Motors with Double-Layer Concentrated Windings" Energies 9, no. 11: 918. https://doi.org/10.3390/en9110918
APA StyleWang, Q., Zhao, B., Zou, J., & Li, Y. (2016). Minimization of Cogging Force in Fractional-Slot Permanent Magnet Linear Motors with Double-Layer Concentrated Windings. Energies, 9(11), 918. https://doi.org/10.3390/en9110918