In order to compare the previous methods with the method proposed in this paper, first, a sensitivity analysis for the influence of the variation of the flux-barrier angles and widths on the SynRM average torque and torque ripple is done. This analysis aims to show an insight about the effect of the different flux-barrier angles and widths on the average torque and torque ripple.
Let us refer to a SynRM geometry with a 10 kW, four-poles and 36 stator slots with the geometrical parameters given in
Table A1 (Appendix) [
5]. The stator has three phase star connected distributed windings, with 15 turns/slot connected in two parallel groups. The stator slot area is 100 mm
2 and the stator slot opening is 2.8 mm. More details about the stator are reported in
Figure A1 and
Table A1 in the
Appendix section. From
Table 1, as the number of stator slots is 36, three flux-barriers per pole are then considered for the sensitivity analysis [
14,
22,
23]. However, the proposed method is also validated for other numbers of barriers. There are several shapes for the flux-barriers [
24]. The shape of
Figure 2 is employed in which
pb,
Wb,
Lb and
θb are the flux-barrier position, width, length and angle, respectively. The detailed values of these parameters are listed in
Table A1 (Appendix).
For the sensitivity analysis of the SynRM, the stator, air gap and rotor dimensions shown in
Figure 2 are fixed and equal to the reference values given in
Table A1 (Appendix). Only the rotor flux-barrier angles
θbi or widths
Wbi have been changed, with
i = 1:3. As there are three flux-barriers, this leads to a three-dimensional parameter space, e.g., in the case of flux-barrier angles, we obtain functions of
θb1,
θb2 and
θb3.
The characteristics of the SynRM are computed using 2D-FEM in which only one pole of the considered four-pole SynRM needs to be modelled. Sinusoidal currents are injected in the windings of the machine at the rated speed (6000 r/min). The stator current is the rated value (22 A) at a current angle α = 56.5°. The current angle (α) is the angle of the stator current space vector with respect to the
d-axis of the motor as shown in [
25]. The flux paths for two different rotor positions are reported in
Figure 3.
3.1. Effect of the Flux-Barrier Angles, θbi
The three flux-barrier angles
θb1,
θb2 and
θb3, shown in
Figure 2, are measured in degrees from the
d-axis to the center of the flux-barrier. The sensitivity analysis is done for a wide range of flux-barrier angles. Here, the results focus on the most important range listed in
Table 2. As mentioned before, all of the other rotor variables are kept constant and equal to the reference values given in
Table A1 (Appendix). Then, the SynRM is solved by FEM and the average torque and torque ripple can be obtained.
Figure 4 shows the variation of the SynRM average torque for different flux-barrier angles at the rated conditions. The maximum and minimum torque values, within the considered range of flux-barrier angles, are 16.08 N.m and 14.61 N.m (about 10.04% difference, compared to the minimum value), respectively. On the one hand, when looking to, e.g., the top right subfigure, the average torque of the SynRM decreases with increasing both
θb2 and
θb3. In addition, when comparing the four subfigures (having the same color scale), the average torque increases with increasing
θb1 till approximately 7.5 degrees and then decreases again. In fact, the variation of the average torque with the flux-barrier angles has two main reasons: (1) the variation of the
d-axis flux path area and (2) the variation of the area and the magnetic saturation level of the flux-barrier ribs (see
Figure 2), which has a direct effect on the
q-axis inductance value. Clearly, there is an optimal value of the flux-barrier angles that realizes the maximum torque: see subfigures for
θb1 = 7.5° and
θb1 = 8.75°.
Figure 5 describes the torque ripple percentage of the SynRM due to the variation of the flux-barrier angles at the rated conditions. The maximum and the minimum torque ripple values are 66.9% and 12.3% (about four times the minimum value), respectively. The difference on the torque ripple is enormous. It is a result of the interaction between the spatial harmonics of the magnetomotive force (MMF) of the stator currents and the rotor geometry, in particular the flux-barrier angles. It is evident that for the flux-barrier angles that are corresponding to the stator slots openings,
θb1 = 10°,
θb2 = 20° and
θb3 = 30°, the SynRM torque ripple is very high—more than 60%. In addition, with moving the flux-barrier angles away from the stator slots openings, the torque ripple of SynRM reduces to a minimum value Ⓜ in
Figure 5. This can be seen for
θb1 = 7.5°,
θb2 = 17° and
θb3 = 27°.
The results of the proposed method, given by Equations (4) and (5), and the aforementioned three methods, given by Equations (1)–(3) are allocated in
Figure 4 and
Figure 5. The abbreviations Ⓟ, ①, ② and ③ refer to the proposed, first, second and third methods, respectively. Note that only the flux-barrier angles are different between the several methods, and the other geometrical parameters are constant and equal to the values shown in
Figure A1 and
Table A1 (Appendix). Besides
Figure 4 and
Figure 5, the output torque and torque ripple of the SynRM designs based on the different methods are listed in
Table 3. The torque and torque ripple based on both methods ① and ② are approximately assigned in
Figure 4 and
Figure 5 at
θb1 = 5°. In addition, the torque and torque ripple based on the method ③ cannot be assigned in
Figure 4 and
Figure 5 because the flux-barrier angles based on this method are out of the considered range. However, their values are mentioned in
Table 3 and lead to a SynRM design with a high torque ripple value. From
Figure 4,
Figure 5 and
Table 3, it is clear that the proposed method Ⓟ gives a SynRM design with the lowest torque ripple of about 12.63%. On the other hand, the average torque based on the proposed method Ⓟ is much better, compared to the others. It is important to point out that the exact values of torque and torque ripple mentioned in
Table 3 may not be indicated in
Figure 4 and
Figure 5 because the contour plots show only the trends of the variation of the parameters. In addition, for the results shown in
Figure 4 and
Figure 5, the flux-barrier end arc is equal to half of the flux barrier width, given in
Table A1, while for the proposed and the existing methods, the flux-barrier end arc is equal to the slot opening. This indeed will have an influence on the average torque and torque ripple.
The proposed method Ⓟ is not only validated for a SynRM rotor with three flux-barrier layers, but also for four and five flux-barrier layers and compared with the three existing methods ①, ② and ③. This is to show its effectiveness in both odd and even number of flux-barrier layers. It is important to highlight that the comparison between the different methods is done for similar electromagnetic and geometrical parameters. Only the flux-barrier angles are chosen based on the method. In
Table 4, it is clear that the proposed method Ⓟ gives a SynRM of four barriers rotor with a torque ripple of 25.45% which is lower than both methods ① and ③ and a bit more than method ②. Note that in case of a four flux-barrier rotor, the method ① is not valid. Therefore, it gives a SynRM design with a very high torque ripple—about 71.6%. The average torque of the SynRM based on the proposed method Ⓟ is much better than the others. In
Table 5, it is obvious that the proposed method Ⓟ gives a SynRM with the lowest torque ripple and highest average torque compared to the existing methods. The torque ripple is about 20.30% based on the proposed method Ⓟ.
From
Table 3,
Table 4 and
Table 5, it is clear that the proposed method, given by Equations (5) and (6), gives better results than the existing methods, given by Equations (1)–(3), for the different number of flux-barrier layers.
3.2. Effect of the Flux-Barrier Widths, Wbi
The flux-barrier widths
Wb1,
Wb2 and
Wb3 are defined as shown in
Figure 2. The sensitivity analysis is done for a wide range of flux-barriers widths. Here, the results for the most important range of
Wb1,
Wb2 and
Wb3 listed in
Table 6, is shown. The flux-barrier angles are selected based on the proposed method, and, therefore, their values are
θb1 = 7.5°,
θb2 = 17.5° and
θb3 = 27.5°. All of the other rotor parameters are kept constant and equal to their value in the reference design given in
Table A1 (Appendix).
Figure 6 shows the variation of the SynRM average torque for different flux-barrier widths at rated conditions. The computed maximum and minimum torque values are 16.06 N.m and 12.21 N.m (about 31.5% difference, compared to the minimum value), respectively. It is evident that, in general, the SynRM torque increases with increasing flux-barrier widths
Wb1,
Wb2 and
Wb3. This is mainly due to the increasing
q-axis magnetic reluctance, and, hence, decreasing
q-axis inductance. In addition, the
d-axis flux path area decreases, and, therefore, the
d-axis inductance decreases a bit. However, the effect on the
q-axis is much stronger so that the saliency ratio increases, and, hence, the torque increases too with increasing flux-barrier widths. It can be deduced that the variation of
Wb1 has a much higher effect on the SynRM torque compared to the variation of both
Wb2 and
Wb3.
Based on the proposed method given by Equations (7) and (8) for selecting the flux-barrier width, the values of
Wb1,
Wb2 and
Wb3 are equal to 5.54 mm. On the other hand, based on the second method, given by Equation (6), the values of
Wb1,
Wb2 and
Wb3 are equal too but their values are 4.60 mm when
Kwq = 0.65 in Equation (6). The torque of the SynRM with a three flux-barrier rotor is assigned with red circles in
Figure 6 with approximating
Wb1 to 5 mm. It is obvious that the SynRM torque based on the proposed method is better than the existing method.
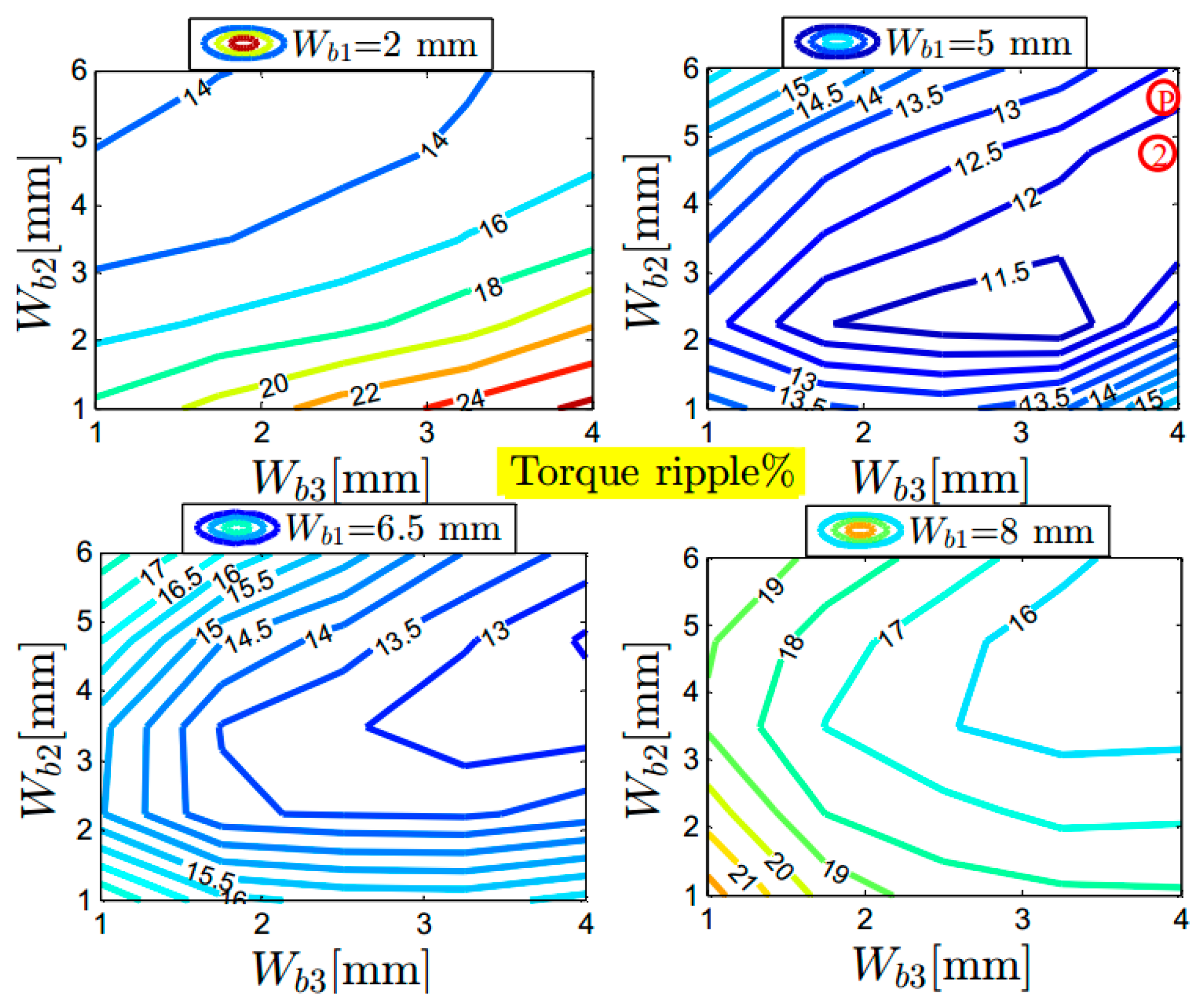
Figure 7 displays the torque ripple percentage due to the variation of the flux-barrier widths at the rated conditions. The maximum and the minimum torque ripple percentage values are 26.52% and 10.50% (about 152.5% difference, compared to the minimum value), respectively. The difference on the torque ripple is large and can be explained in the same way as in
Section 3.1. An important conclusion here is that the torque ripple seems to remain very low regardless of the choice of the barrier width parameters. In addition, the torque ripple values based on the proposed and second method are assigned in
Figure 7 with red circles. It is evident that both methods give approximately a similar torque ripple value. This is definitely because the flux-barrier angles are similar.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











