Enhanced Non-Contact Grip Force and Swirl Stability by a Combined Venturi–Vortex Air Head


Abstract
:1. Introduction
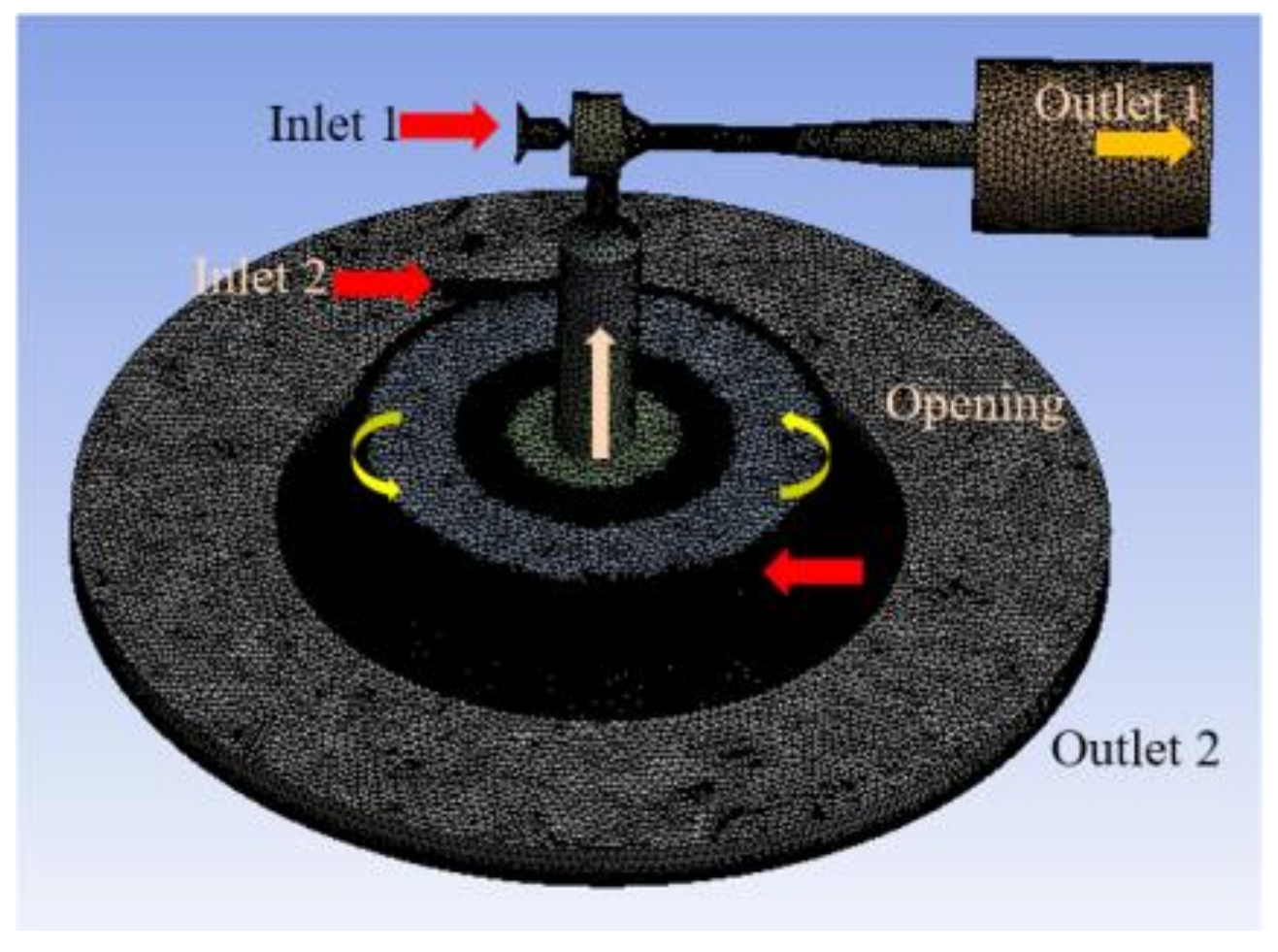
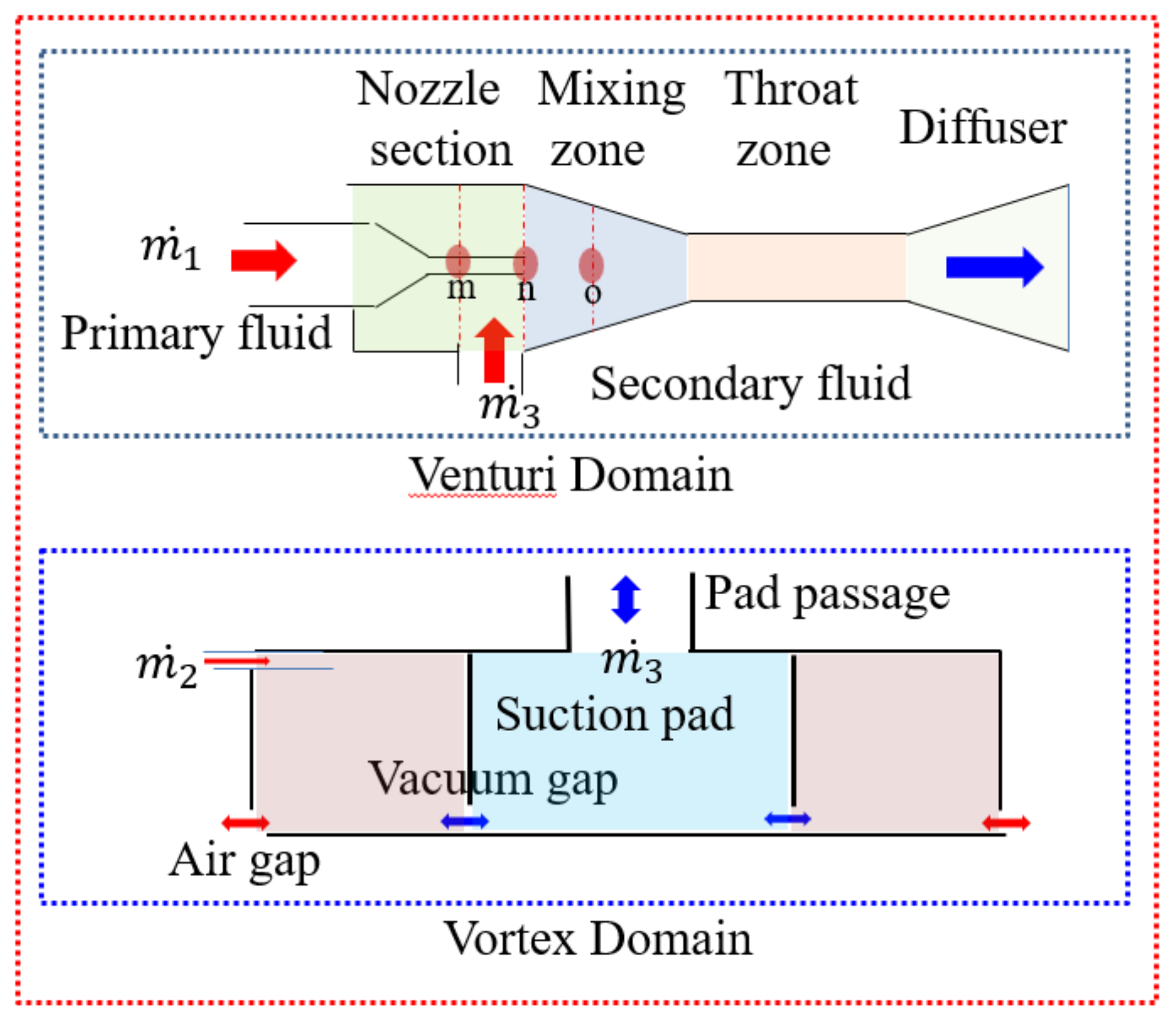
2. Combined Venturi–Vortex Air Head
3. Numerical Method
4. Results and Discussion
4.1. Vacuum Pumping by the Venturi Chamber
4.1.1. Venturi Performance with the Closed Suction Pad
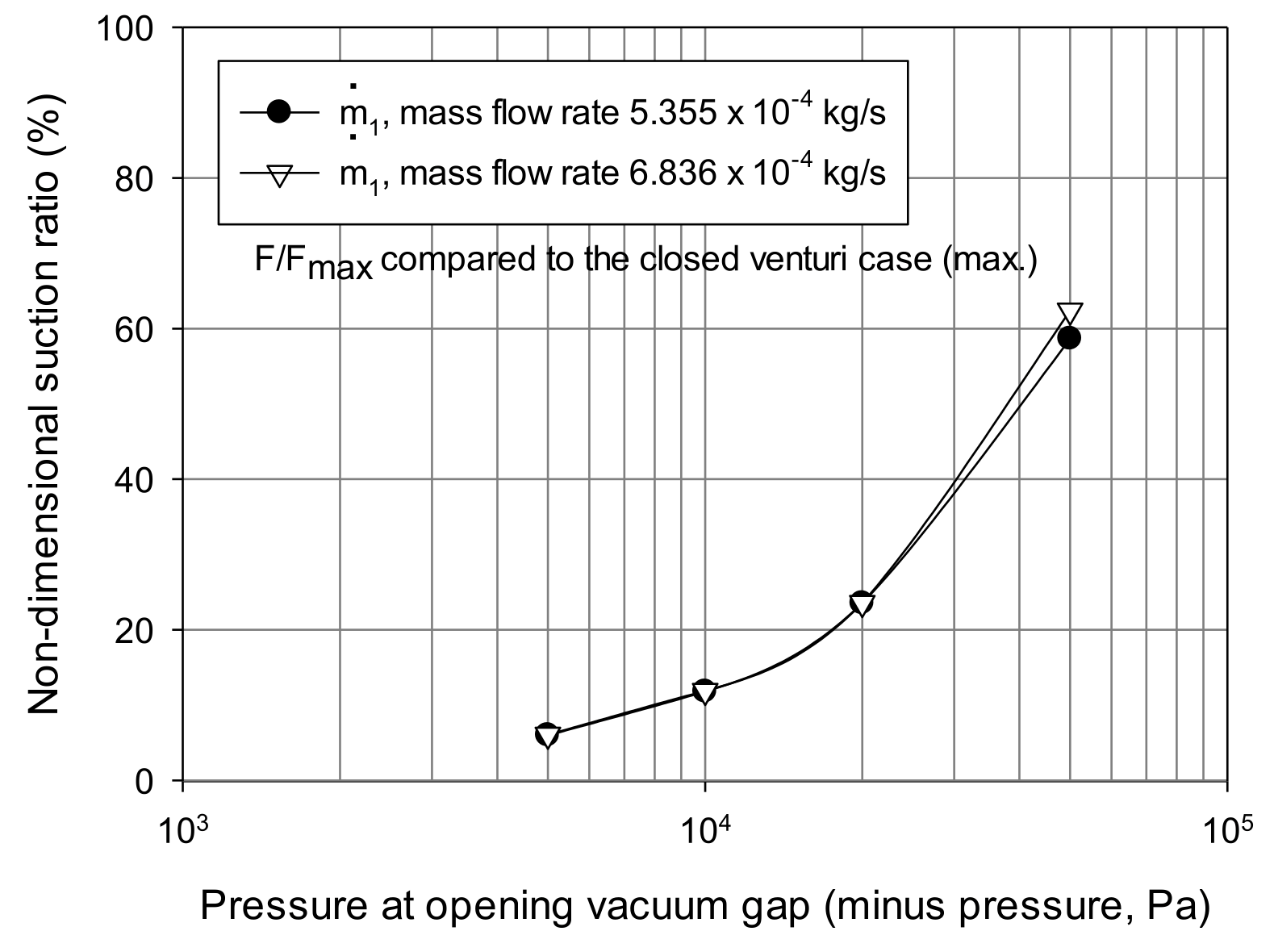
4.1.2. Sealing Effect of the Vacuum Gap in the Suction Pad
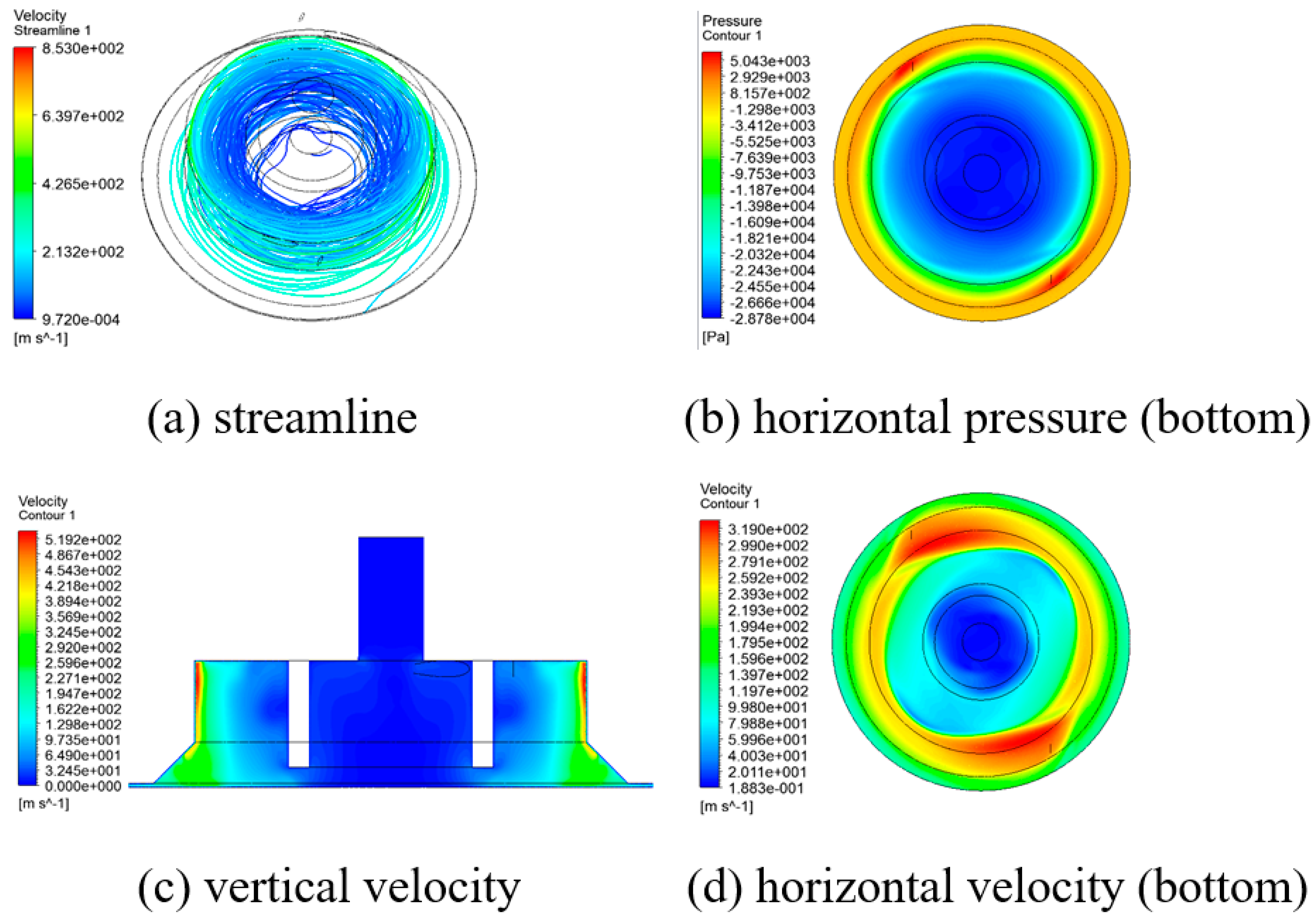
4.2. Vacuum Generation of the Vortex Cup
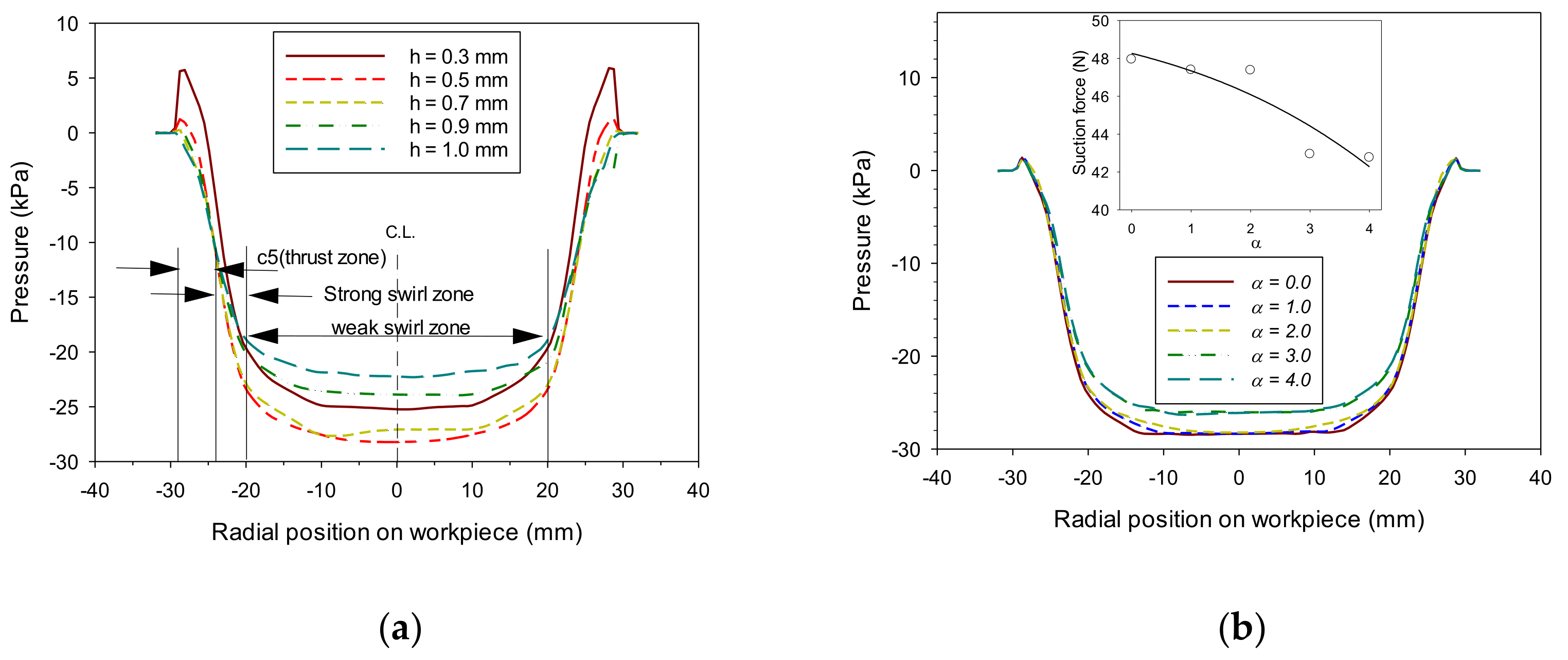
4.2.1. Effect of the Air Gap and the Vacuum Gap in the Vortex Cup
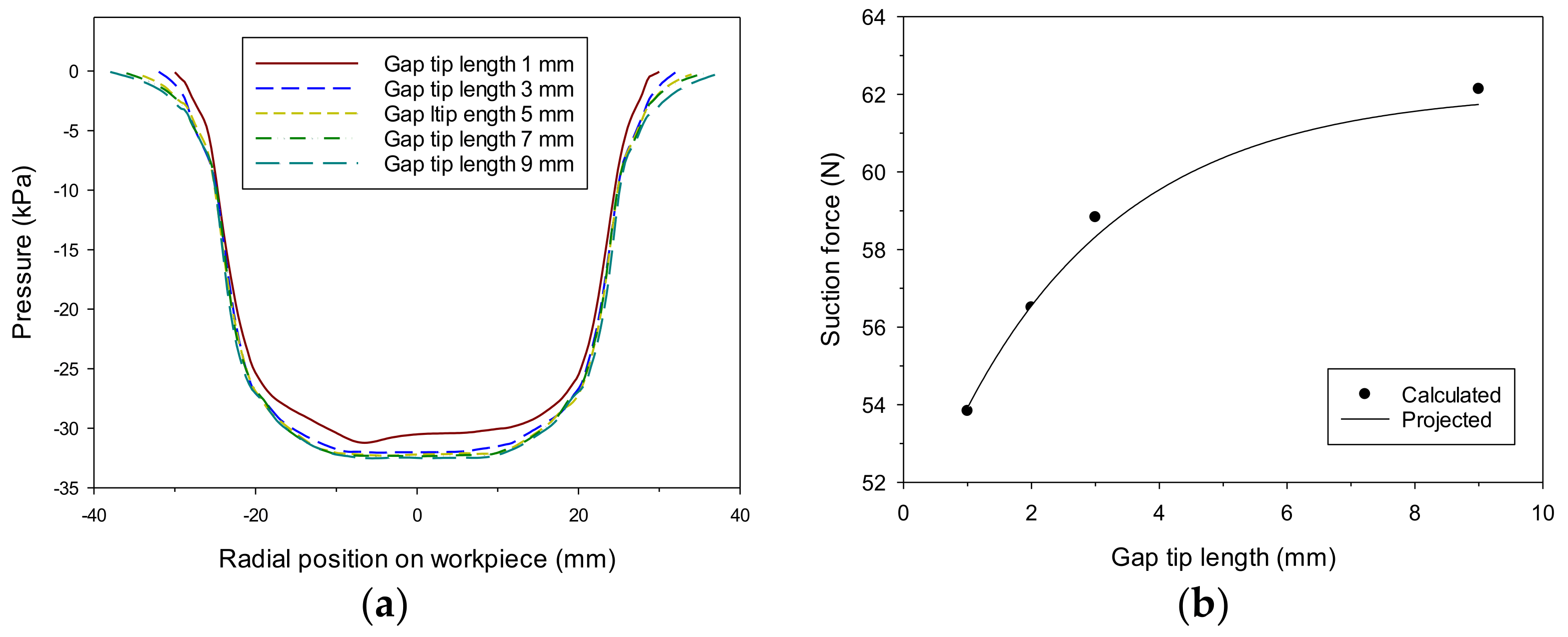
4.2.2. Influence of the Tip Length of the Vortex Cup
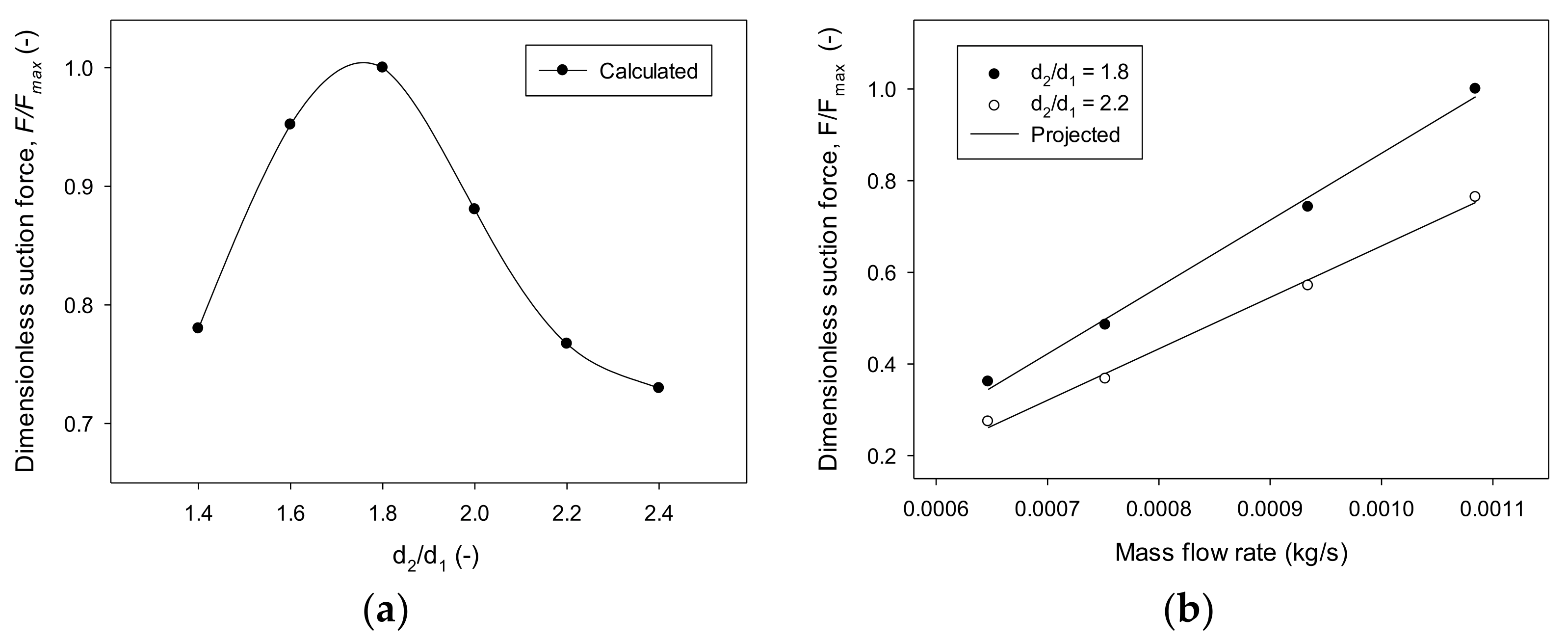
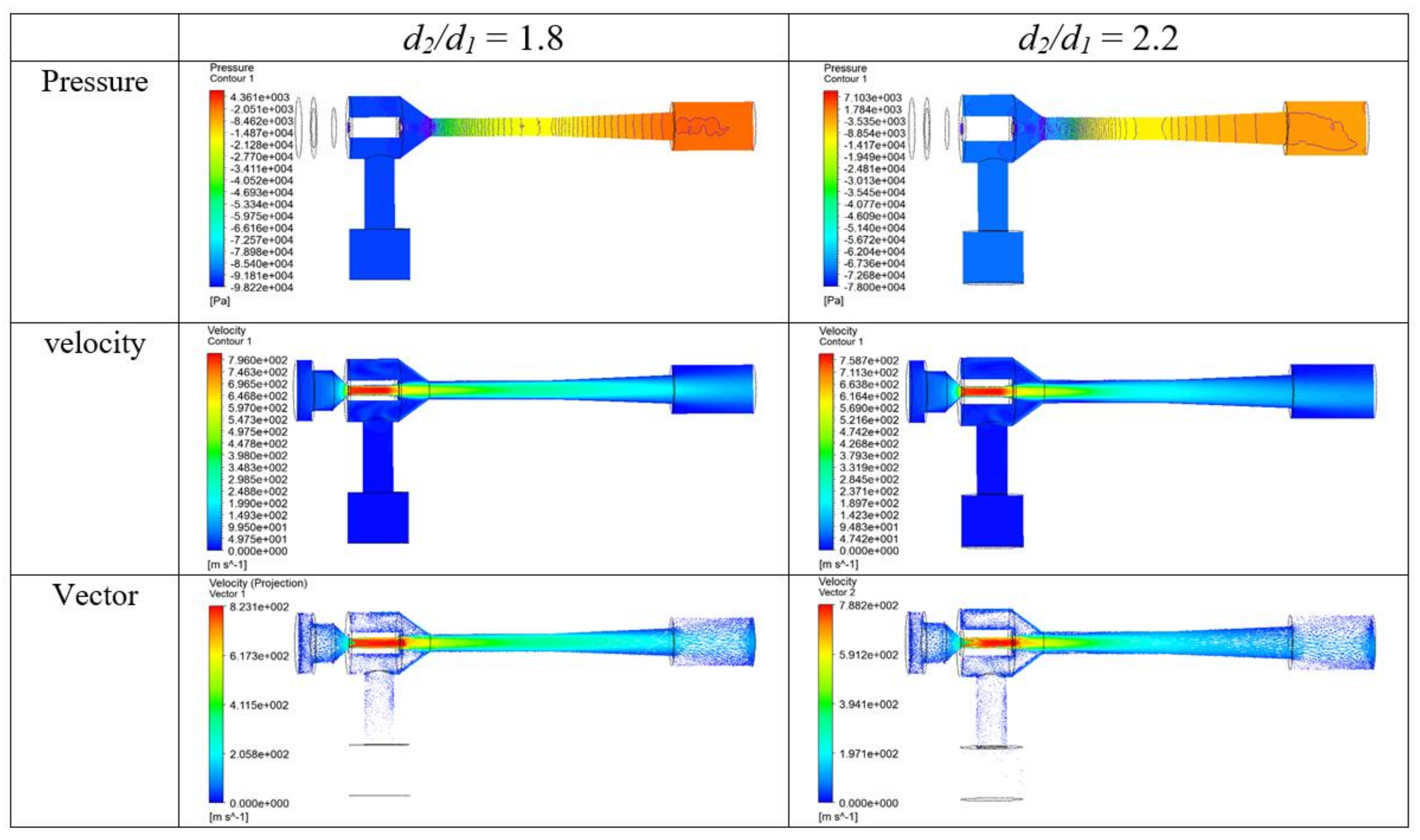
4.3. Grip Performance of the Combined Venturi–Vortex Gripper
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, X.; Zhong, W.; Li, C.; Fang, J.; Liu, F. Development of a contactless air conveyor system for transporting and positioning planar objects. Micromachines 2018, 9, 487. [Google Scholar] [CrossRef] [Green Version]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Mikhalishin, M. Energy efficiency analysis of the manipulation process by the industrial objects with the use of Bernoulli gripping devices. J. Electr. Eng. 2017, 68, 496–502. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.H.; Lee, S.-J. Configuration of noncontact grip system for carrying large flat sheets using vacuum air heads. ASME J. Tribol. 2015, 137, 041103–8. [Google Scholar] [CrossRef]
- Mantriota, G. Optimal grasp of vacuum grippers with multiple suction cups. Mech. Mach. Theory 2007, 42, 18–33. [Google Scholar] [CrossRef]
- Tuleja, P. Technical solution of problems in the handling of the object with non-consistent surface. Am. J. Mech. Eng. 2016, 4, 400–405. [Google Scholar] [CrossRef]
- Lee, T.G.; Yu, J.S.; Jung, H.J.; Kim, J.-H.; Kim, J.H. Development of the air floating conveyor system for the large glass sheet. J. Korean Soc. Manuf. Techn. Eng. 2013, 22, 635–642. [Google Scholar] [CrossRef]
- Li, X.; Kagawa, T. Theoretical and experimental study of factors affecting the suction force of a Bernoulli gripper. J. Eng. Mech-ASCE 2014, 140, 04014066. [Google Scholar] [CrossRef]
- Stühma, K.; Tornowa, A.; Schmitta, J.; Grunaua, L.; Dietricha, F.; Drödera, K. A novel gripper for battery electrodes based on the Bernoulli-principle with integrated exhaust air compensation. Procedia CIRP 2014, 23, 161–164. [Google Scholar] [CrossRef] [Green Version]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F. Gasdynamic analysis of the Bernoulli grippers interaction with the surface of flat objects with displacement of the center of mass. Vacuum 2019, 159, 524–533. [Google Scholar] [CrossRef]
- Shi, K.; Li, X. Experimental and theoretical study of dynamic characteristics of Bernoulli gripper. Precis. Eng. 2018, 52, 323–331. [Google Scholar] [CrossRef]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Lien, T.K.; Seliger, G.; Reinhart, G.; Franke, J.; et al. Grasping devices and methods in automated production processes. CIRP Ann. Manuf. Technol. 2014, 63, 679–701. [Google Scholar] [CrossRef]
- SMC Web Catalogue. Available online: http://www.smckorea.co.kr/homepage/ver3.5/product/catalogue_norm.asp (accessed on 20 November 2019).
- Li, X.; Kagawa, T. Development of a new noncontact gripper using swirl vanes. Robot. Comput. Int. Manuf. 2013, 29, 63–70. [Google Scholar] [CrossRef]
- Journee, M.; Chen, X.Q.; Robertson, J.; Jermy, M.; Sellier, M. An investigation into improved non nontact adhesion mechanism suitable for wall climbing robotic application. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai International Conference Center, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Makarov, A.M.; Serdobintsev, Y.P.; Mushkin, O.V.; Lapikov, M.A. Research of the process of automatic gripping of air-penetrating flexible containers with vacuum during sorting of free-flowing products. In Proceedings of the 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Petersburg, VA, USA, 16–19 May 2017. [Google Scholar] [CrossRef]
- Mansor, M.F.; Sam, R.; Masrie, M.; Janin, Z. Design and development of flexible end effector based on Bernoulli principle. In Proceedings of the 2017 IEEE 13th International Colloquium on Signal Processing & Its Applications (CSPA), Penang, Malaysia, 10–12 March 2017. [Google Scholar]
- Morisawa, T.; Yano, Y.; Tsukiji, T.; Suzuki, R. A noncontact holder using air flow. JFPS Int. J. Fluid Power Syst. 2019, 11, 104–109. [Google Scholar] [CrossRef]
- Li, X.; Li, N.; Tao, G.; Liu, H.; Kagawa, T. Experimental comparison of Bernoulli gripper and Vortex gripper. Int. J. Precis. Eng. Man. 2014, 16, 2081–2090. [Google Scholar] [CrossRef]
- Zhao, J.; Li, X. Effect of supply flow rate on performance of pneumatic non-contact gripper using vortex flow. Exp. Therm. Fluid Sci. 2016, 79, 91–100. [Google Scholar] [CrossRef]
- Kumar, S.R.; Karthick, P.A.; Boovendravarman, S.; Raghul, K.S.; Thiyagu, S. Characteristics of contactless swirl vane gripper by investigating the negative pressure and clearance. Mater. Today Process. 2020, 33, 270–274. [Google Scholar] [CrossRef]
- Kim, J.H.; Sung, J. Influence of air head shape on lifting force and stability of swirl flow in a Vortex-type non-contact gripper. J. Korean Soc. Manuf. Technol. Eng. 2019, 28, 224–231. [Google Scholar] [CrossRef]
- Simpson, A.; Ranade, V. Modeling hydrodynamic cavitation in venturi: Influence of venturi configuration on inception and extent of cavitation. AIChE J. 2021, 65, 421–433. [Google Scholar] [CrossRef]
- Dutta, N.; Kopparthi, P.; Kumar, A.K.; Nirmalkar, N.; Boczkay, G. Novel strategies to enhance hydrodynamic cavitation in a circular venture using RANS numerical simulations. Water Res. 2021, 204, 117559. [Google Scholar] [CrossRef]
- Fu, W.; Liu, Z.; Li, Y.; Wu, H.; Tang, Y. Numerical study for the influences of primary stream nozzle distance and mixing chamber throat diameter on steam ejector performance. Int. J. Therm. Sci. 2018, 132, 509–516. [Google Scholar] [CrossRef]
- Savkiv, V.; Mykhailyshyn, R.; Duchon, F.; Fendo, O. Justification of design and parameters of Bernoulli-vacuum gripping device. Int. J. Adv. Robot. Syst. 2017, 14, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Schaaf, W. Compressed-Air-Operated Vacuum Generator or Vacuum Gripper. U.S. Patent 9,062,689 B2, 23 June 2015. [Google Scholar]
- Schaller, J.; Vopat, R.B. Venturi Assisted Gripper. U.S. Patent No. 8,777,284 B2, 15 July 2014. [Google Scholar]
- Convum Myotoku Ltd. Available online: https://www.convum.co.jp/ko/products/convum.html/ (accessed on 3 October 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter (Symbol) | Value (Unit, mm) |
|---|---|
| Venturi nozzle diameter (d1) | 1 |
| Constant section diameter (d2) | 1.4–2.4 |
| Upper vacuum intake port (d3) | 3 |
| Lower vacuum intake port (d4) | 8 |
| Suction/constant/diffuser length (L) | 28 |
| Cup tip length (l) | 0–9 |
| Cup inlet diameter (a) | 2 |
| Suction pad height (hi) | 13 |
| Inner vortex cup diameter (Di) | 48 |
| Suction pad diameter (d5) | 20 |
| Inner vortex cup height (Hi) | 15 |
| Parameters | Conditions |
|---|---|
| Fluid domain | Steady state, incompressible |
| Working fluid | 25 °C air |
| Turbulence model | k–ε model (intensity 5%) |
| Inlet | venturi inlet 1 (mass flow rate) |
| vortex inlet 2 (mass flow rate) | |
| Outlet | pressure outlet (atmosphere) |
| Opening | Relative pressure |
| Venturi only (0 Pa below) | |
| Vortex (0 Pa) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, Y.H.; Kim, J.H.; Sung, J. Enhanced Non-Contact Grip Force and Swirl Stability by a Combined Venturi–Vortex Air Head. Materials 2021, 14, 7123. https://doi.org/10.3390/ma14237123
Lee YH, Kim JH, Sung J. Enhanced Non-Contact Grip Force and Swirl Stability by a Combined Venturi–Vortex Air Head. Materials. 2021; 14(23):7123. https://doi.org/10.3390/ma14237123
Chicago/Turabian StyleLee, Yung Hoon, Joon Hyun Kim, and Jaeyong Sung. 2021. "Enhanced Non-Contact Grip Force and Swirl Stability by a Combined Venturi–Vortex Air Head" Materials 14, no. 23: 7123. https://doi.org/10.3390/ma14237123
APA StyleLee, Y. H., Kim, J. H., & Sung, J. (2021). Enhanced Non-Contact Grip Force and Swirl Stability by a Combined Venturi–Vortex Air Head. Materials, 14(23), 7123. https://doi.org/10.3390/ma14237123