The most convenient way to calibrate the developed model with respect to experimental tests is to use the pure shear stress and the equal triaxial tension or compression. Unfortunately, triaxial tests are almost impossible to perform, considering their complexity and expensiveness. The shear stress tests with
can be carried out, but still are not a common practice in engineering applications. Technically, the uniaxial tension or the uniaxial compression tests are available for many materials, including aluminum alloys [
10,
11,
12]. Typically, the uniaxial tests provide only a relation between the direct strain and the applied stress, with no relation for the transverse strain, whose availability can significantly improve the quality of calibration. The constitutive relationships for three-dimensional nonlinear models are usually quite complex and non-invertible, thus difficult to calibrate on the basis of sole uniaxial tests. Note, that the constitutive relationship in which the stress tensor is a function of the strain tensor is convenient for the finite element implementation, but is troublesome when the calibration is based on stress tests. In this section, first, we propose a calibration procedure, applicable to “plastically” incompressible material, which leads to an acceptable accuracy. Then, we describe a more general approach to calibration for fully compressible material and discuss the obtained results. We will use a one-dimensional model analog of the spatial one to approximate experimental results for the uniaxial tension or compression stress states.
3.1. One-Dimensional Analog of the Proposed Nonlinear Elastic Material Model
The elastic strain energy for the one-dimensional nonlinear elastic model is:
where
is the hypergeometric function [
28], see also Equation (1). The regarded specific energy function is non-negative,
, and convex when
,
,
and
. Function in Equation (35) depends on four material parameters:
,
,
and
which can be determined from the uniaxial tests. We define two useful stress parameters
and
by the following relations:
and
. Differentiation of Equation (35) leads to the one-dimensional constitutive relationship:
When
, the above relationship can be written in intervals as a piecewise linear relation:
Equation (38) defines two skew asymptotes, one for tension and another for compression:
Graphs of the constitutive relation described by Equation (36) for
with asymptotes according to Equations (37) and (38) for tension are shown in
Figure 3.
can be interpreted as a parameter governing the smooth regularization of the piecewise linear relationship. All the material parameters introduced in the one-dimensional model are explained in
Figure 3a. Range for the hardening modulus
and stress–strain curves for several values of
with fixed other parameters are presented in
Figure 3b. The figure delivers a general overview on the flexibility of the proposed model in description of possible material’s response.
The secant and tangent stiffness functions are expressed by the formulae:
Strict convexity of energy defined by Equation (35) with respect to strain is attained if
for arbitrary
. When
, we obtain the initial stiffnesses
, and for
, we get the asymptotic stiffness values
. Via the function
, we can control the curvature of the elbow in the vicinity of
point shown in
Figure 3. For low-hardening aluminum alloys, we observe a significant difference between the initial and the asymptotic stiffnesses, typically
, while the regularization parameter
takes values from 2 to 6 depending on the alloy type. During the presented calibration of the model, first, we estimate the initial modulus
and the hardening modulus
, then calculate characteristic stress
(or strain
) and, finally, we obtain the power
parameter numerically. In the literature, we can find various one-dimensional models which are calibrated with available experimental data, compare in [
7,
8,
9,
10,
11,
12,
13]. The presented one-dimensional model can be calibrated with the same uniaxial tests. In case of one-dimensional model optimization techniques, such as the least squares method, can be used to enhance agreement with experimental data. However, those results cannot be directly transferred to calibration of the three-dimensional model against the uniaxial test.
3.3. Calibration Procedure for Simplified Model
First, we regard a special case where
(or equivalently
) and
that results in
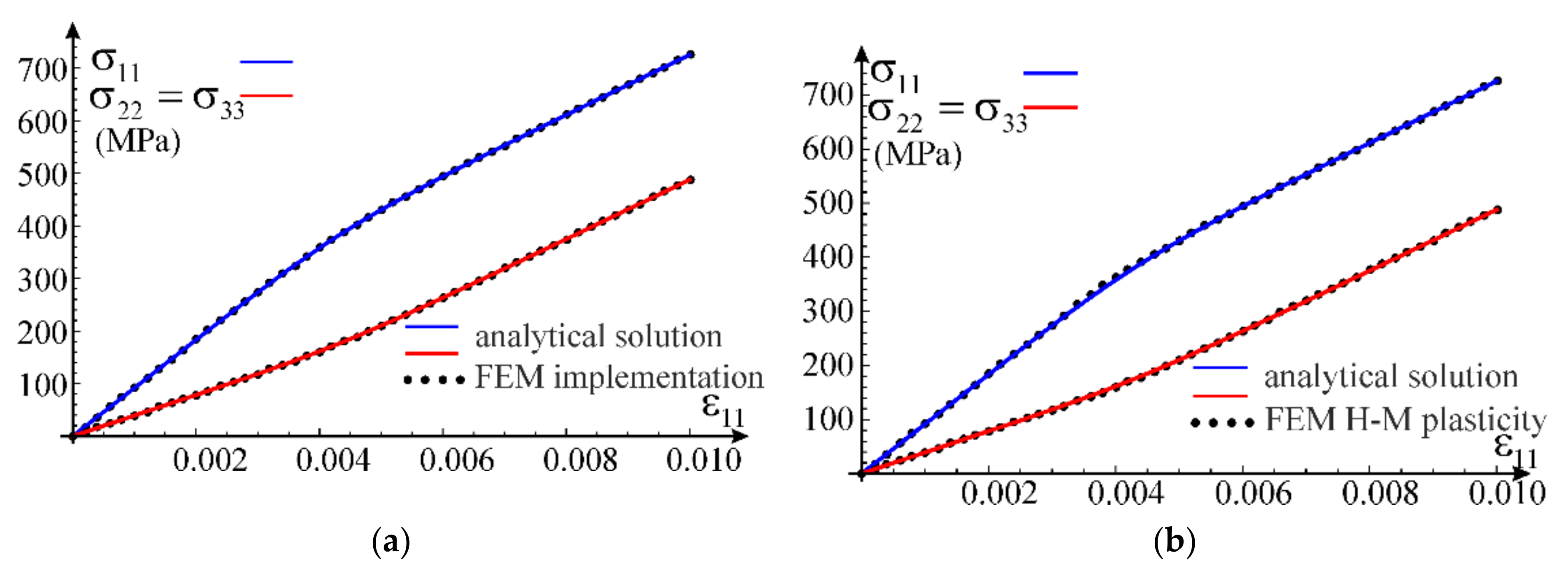
. In other words, we keep a linear material behavior for the isotropic part, while the reduction of stiffness occurs for the distortional part of the constitutive relationship in Equation (22). We analyze this case separately because of its close relations to the Hencky–Nadai deformation theory of plasticity with modified deviatoric part of the constitutive relationship. We use results obtained here to compare the proposed model predictions with the Prandtl–Reuss plastic flow theory based on the Huber–Mises yield condition (plastic incompressibility) with an isotropic hardening [
1,
2,
21].
For the uniaxial test according to Equation (41), the asymptotic relation defined in Equation (24) becomes:
Equation (49) can be solved analytically for the tension or compression test separately. In case of tension, we express the transverse strain as:
and, then, Equation (48) takes the form:
Comparison of the one-dimensional model asymptote expressed by Equation (39) for tension with Equation (51) yields the following calibration formulae for
and
:
Based on Equations (47) and (51), we can correlate
and
solving
, which results in the following expression:
The first result in Equation (52) and the above outcome (Equation (53)) are the sought final calibration formulae. Having determined and , we obtain (or ) in the one-dimensional model. Assuming , we obtain and using Equation (5), then applying Equation (52) and Equation (53), we can calculate the and parameters of the three-dimensional model.
Using Equation (50), we can define the asymptotic Poisson ratio function for the regarded simplified model:
which can be written in the alternative forms:
Function
defines an envelope (the lower limit) for the actual Poisson’s ratio in the proposed model, compare with the results in [
5,
31]. Note that full incompressibility of the material is attained for
.
Let us summarize the sequence of calculations in the procedure of material parameters calibration for the simplified model. In the procedure, we assume the initial Poisson ratio and estimate (calculate) the initial and hardening moduli from uniaxial experimental test data. The initial modulus should be determined as a trend line at the initial part of an experimental stress–strain curve. The hardening modulus is estimated from the pre-peak part (hardening stage) of an experimental test. Then, we calculate , , , , and using the derived calibration formulae. The last parameter , we determine from Equations (43) and (44) with based on one experimental point located in the vicinity of the elbow of an experimental stress–strain curve.
Constitutive relationships for the uniaxial stress state (Equations (43) and (44)) can be expressed in a parametric way using the generalized (for the model) Poisson ratio
defined by the equality
. In the range of
prescribed by Equation (7), the relation between
and
is of the form:
As an example, we use our own experimental test data for aluminum AW6063 T66. For the data, the conventional proportionality limit is estimated as
for strain
and, then, the initial elasticity modulus is calculated as
. For the estimation of hardening modulus, we select two points: in the initial hardening zone
and the ultimate stress
. Based on those values, we calculate parameters included in the one-dimensional model (Equation (36)):
Assuming a value of the initial Poisson’s ratio of
, we obtain parameters of the three-dimensional model using Equations (5), (52) and (53):
Having and , we calculate the value of the asymptotic Poisson ratio using the inverse form of the last relation in Equation (5), which is within the allowed limits according to Equation (7): . The regularization parameter is calculated using an additional calibration point located in the vicinity of elbow on the experimental stress–strain curve . Numerical solution to the system of Equations (43) and (44) via Wolfram Mathematica gives the following results: and . Finite element simulations of test problems for those values of parameters are presented in the next sections.
Since the one-dimensional model cannot be exactly transferred to the uniaxial state from the spatial one, the proposed calibration process is sensitive to the selection of calibration points. Results of calibration for several locations of the point in the hardening zone of the experimental curve
for determination of parameters
,
and
(or
) are given in
Table 1. Moreover, we can observe that the selection of
has a strong influence on the regularization parameter
as well. To ensure the convergence for finding a numerical solution, the following condition for the selected point should be checked
, according to the asymptotic limit in Equation (51) for the hardening stage.
Graphs of the one-dimensional constitutive relation given by Equation (36) for three calibration points included in
Table 1 are shown in
Figure 4a. Distributions of the secant and tangent moduli from Equation (40) are presented in
Figure 4b. We can observe graphically some sensitivity of stress–strain curves to the assumed location of the calibration point for determination of the hardening modulus
. The best agreement between the one-dimensional model prediction and the experiment is for a calibration point located between strain
and
for the regarded alloy.
Results based on the values of material parameters according to Equation (59) are presented in
Figure 5. Graphs of the model Poisson’s ratio as a function of strain governed by Equation (56) is shown in
Figure 5a. The lower band Poisson’s ratio for the linear envelope (asymptote at origin) according to Equation (47) and the function from Equation (55) for a skew asymptote of the uniaxial test curve are shown for comparison. Graphs in
Figure 5b present comparison of the stress–strain curves determined for the one-dimensional model in Equation (36) with the uniaxial stress test of the three-dimensional model from Equation (56). Asymptotes are also included in the graphical interpretation of results. The model predictions (blue line) are in very good agreement with the experimental test (dashed line) used for the calibration. Besides the scatter of the experimental results close to the origin (for
), the maximum relative difference between the model prediction and the experiment is up to 2% (
when
), for the first stage, and 1% (
when
), for the second stage.
3.4. Calibration Procedure for Fully Compressible Material
Procedure described in
Section 3.3 will be now extended to the fully compressible material including the second stage of behavior, where the bulk modulus undergoes changes
. Results for the initial linear behavior governed by Equation (47) remain true. The present calibration is based on uniaxial experimental data. For the asymptotic relation in Equation (21), we use here a generalized Poisson’s ratio
(
), which allows to express Equations (43) and (44) in the form:
where:
Equation (61) can be solved for
, separately for the uniaxial compression and tension. In case of tension, we obtain:
which, when substituted into Equation (60), results in:
where:
Functions of the asymptotic direct strain and the asymptotic normal stress define the stress–strain relation in the uniaxial test in the parametric form. The generalized Poisson’s ratio can change within the limits .
To find the calibration formulae in the following derivations, we will regard
as a parameter in the parametric description of the uniaxial stress state of the elastic model. The nonlinear path of the uniaxial stress in the plane of invariants
is shown in
Figure 6. Note that for a linear material, the uniaxial stress path goes along a straight line. For our model, the relation between
and
is nonlinear since the Poisson’s ratio function
changes with the loading level within the prescribed limits
. This function has a skew asymptote which can be determined by calculation of the appropriate limits of the functions in Equation (63) and Equation (64) when
. The asymptote is described by the following function:
Comparison of the asymptote for the one-dimensional model from Equation (39) for tension with Equation (66) yields the following calibration formula:
which confirms the definition of the hardening shear modulus (Equation (5)). Based on Equations (47) and (66), we can solve
leading to the following dependence of
on
:
Equation (68) is the sought calibration formula for the fully compressible material.
The constitutive relationships for the uniaxial stress state described by Equations (43) and (44) can be expressed in a parametric way using the model Poisson’s ratio
. In case of fully compressible material model, the relation between
and
is:
In the calibration procedure of the three-dimensional model of the fully compressible material, we assume the initial and the asymptotic Poisson’s ratios within the limits resulting from Equation (7). Note that and can be calibrated as well if experimental results for the transverse strain are available. Next, we calculate the initial and the hardening moduli from the uniaxial experimental data (direct strain versus stress). The initial modulus should be determined as a trend line at the initial part of an experimental stress–strain curve. The hardening modulus is estimated from the pre-peak part (advanced hardening stage) of an experimental test. Then, we can calculate bulk and shear moduli , , , for both stages, and on the basis of the asymptotes of the one-dimensional model or , we obtain from Equation (68). The last parameter we determine from Equations (43) and (44) using one experimental point located in the vicinity of the elbow of a stress–strain curve.
For the regarded experimental data for aluminum AW6063 T66, the parameters
,
,
and
have the same values as in
Section 3.3. Assuming values of the initial and the asymptotic Poisson’s ratios
and
(almost incompressible asymptotic material behavior) located within the limits
, we calculate parameters of the three-dimensional model using Equation (5):
along with Equations (68) and (3):
The obtained values show significant drop in the bulk modulus value for the hardening stage if compared to asymptotic incompressible material model. Having results in Equations (71) and (72), we calculate the regularization parameter using an additional calibration point, as previously, located in the vicinity of elbow of the experimental stress–strain curve . Numerical solutions to the system of Equation (43) and Equation (44) are and .
Again, the proposed calibration process is sensitive to the selection of calibration points. With the assumed
, results of calibration for several locations of a point in the hardening zone of the experimental curve
are given in
Table 2. The value of the regularization parameter
is also greatly affected by the choice of
. The selected point should be below the asymptotic curve described parametrically by Equation (63) and Equation (64).
Contour lines of the elastic energy defined by Equation (1) in the plane of invariants
for the fourth set of parameters (based on point with
) from
Table 2 are presented in
Figure 6. A straight line representing the path of the uniaxial strain test and a curved path of the uniaxial stress according to Equation (42) with usage of Equation (69) and Equation (70) are shown as well. In case of a linear material, the uniaxial stress path follows a straight line (light blue), which is included for comparison. Because of the curved path of the uniaxial stress (dark blue), the calibration procedure is not straightforward, as was shown in this section. Location of the elbow ellipse
, separating the domain of the initial linear envelope from Equation (20) from the domain of the asymptotic relationship according to Equation (21), is also given with a solid green line in
Figure 6.
The stress–strain curves of the calibrated model for the fourth set (
) of parameters from
Table 2 are presented in
Figure 7a,b. The calibrated constitutive relation for the uniaxial stress in the three-dimensional model according to the parametric formulae in Equations (69) and (70) is shown in
Figure 7a. The asymptote of this relation described by Equation (66) and the asymptotic curve based on definitions in Equations (63) and (64) are plotted in this figure as well. Only in the vicinity of the elbow, the difference between curves is significant. The asymptotic curve (orange line) and its asymptote (green line) diverge in the elbow zone more than the curve of the one-dimensional model shown in
Figure 7b. This effect is closely related to the nonlinear path of the uniaxial stress state shown in
Figure 6. Generally, the bigger hardening in the second stage is, the larger difference between those curves can be observed. The stress–strain curves determined for the one-dimensional model in Equation (36) and for the uniaxial stress test of the three-dimensional model described by Equations (69) and (70) are compared to the experimental relation in
Figure 7b. A very good compatibility between the experimental data and model predictions can be observed. The maximum error between the model’s prediction and the experiment is up to 2%, but generally decreases. Comparison of predictions according to the three sets of calibrated parameters included in
Table 2 are presented in
Figure 7c,d. In case of compressible material, stress–strain curves are less sensitive to the selection of the calibration point than those for asymptotically an incompressible material or one-dimensional model (
Figure 4). Relations between the transverse strain and the stress are shown in
Figure 7d. In contrast to calibration from
Section 3.3, the best correspondence of the uniaxial test prediction and the experiment is for a calibration point located between strain
and
for the regarded alloy.
As an alternative to the presented equations, the calibration of the fully compressible material can be done by usage of four appropriately selected experimental points without reference to the one-dimensional model. In this approach, and must be assumed according to the limits set by Equation (7). Next, using the selected points from the experimental stress–strain curve, the four remaining parameters , , and can be calculated. Based on Equations (43) and (44), a system composed of eight nonlinear equations, two for each calibration point, is solved numerically using Wolfram Mathematica. Four values of (for each point) are determined as well. The solution is very sensitive to the choice of experimental points and starting points for iterations. Assuming Poisson’s ratios , and the experimental calibration points : , , , , the following values of parameters are found: , , and . Then, the parameters of the three-dimensional model can be obtained: , , , , , .
Results of this variant of calibration are shown in
Figure 8. A graph of the model Poisson’s ratio as a function of strain (Equation (69)) is shown in
Figure 8a. Comparing this graph with graphs presented in
Figure 5a, we can observe a slower development of the model’s Poisson ratio for the fully compressible material than for the second stage of the asymptotically incompressible material.
Figure 8b provides a comparison of the stress–strain curves determined for the one-dimensional model from Equation (36) and the uniaxial stress test of the three-dimensional model defined by Equations (69) and (70). The compatibility of the model’s predictions and the experimental curve is satisfactory. The difference between the one-dimensional model and the uniaxial stress for strains above the elbow is related to the nonlinear path of the uniaxial stress state shown in
Figure 6. The best compatibility between the uniaxial test prediction and the experiment is when the third calibration point is selected between strain
and
for the regarded alloy. This range is in contradiction with the suggested range
and
for the asymptotically incompressible material.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}