1. Introduction
Dielectric elastomer actuators are considered electroactive polymers. This means that if an electrical voltage is applied, they undergo a certain response, usually a deformation process. Since deformation strains bigger than 100% were reported by Pelrin et al. [
1], the number of publications increased rapidly. DEA are used in a wide variety of areas but find their most frequent use in soft robotics and sensor application [
2,
3,
4,
5,
6,
7,
8]. They are lightweight, their laboratory-scale production is reasonable and their deformation potential is outstanding [
9]. The deformation behavior of dielectric elastomer actuators is caused by Maxwell stresses that are generated due to an applied electrical field. An electrical field can be induced in an orthogonal direction to the material’s surface by applying an electric potential difference between two conducting electrodes that cover the material’s surfaces. This leads to an equibiaxial, planar actuation of the structure [
10]. In
Figure 1, the electro-mechanical actuation mechanism is shown on a simple DEA, where
is the Maxwell stress, and
or
is described as the axial stress, which leads to an expansion of the dielectric layer. In order to calculate the electrostatic pressure
, an approach from Pelrine et al. [
11] was used where
is the relative permittivity of the dielectric layer (the dielectric constant) and
is the permittivity of the free space (vacuum). The other variables are the electric field strength
, the Voltage
and the layer thickness of the dielectric layer
. In Equation (1), the connection between an applied electric field and the corresponding Maxwell stresses is shown. With increasing voltages, the electrostatic pressure increases quadratically:
Different types of DEA are developed based on acrylic VHB
TM, hydrogels or polydimethylsiloxane (PDMS) [
12,
13,
14]. While the majority of characterization studies can be found for acrylic VHB
TM-based DEA, because of their uncomplicated handling and wide availability, PDMS-based materials offer many advantages. They are highly flexible, thin and unaffected by most chemicals. Additionally, in most cases, they offer a significantly lower viscoelastic behavior in comparison to acrylic VHB
TM sheets. In case scenarios that require fast activation and accurate movements, an almost purely elastic material is preferable. PDMS-based materials offer a soft and tactile surface and are therefore well-suited for applications in the field of gripping or handling fragile objects. Especially for soft robotics, those actuators offer great possibilities to achieve complex movements [
2,
5].
VHB
TM-based materials were tested in varying test scenarios concerning the acquisition of material parameters influenced by the electric field. These findings are used as a validation basis for finite-element-method (FEM) simulation [
15,
16,
17,
18,
19]. The research previously conducted showed a great effect on the viscoelasticity of these acrylic VHB
TM materials during loading–unloading cycles. Mehnert et al. showed that even after several minutes, there is still observable stress relaxation in VHB
TM [
18]. The parameter identification for a suitable constitutive model was also conducted by Mehnert et al. [
18], but, as stated before, only for VHB
TM materials.
In addition to the dielectric layer, the electrodes of a DEA have a crucial influence on the actuation behavior. In most cases, the electrodes of DEA are neglected while calculating the behavior of the active material. In contrast, Carpi et al. [
20] showed that the electrodes indeed influence the behavior of the actuator. The mechanical behavior of the electrodes is difficult to predict and control. Therefore, the influence of the electrode layers should be as low as possible to ensure the most extensive process control over the DEA during activation. In order to achieve this, the electrode materials should be thin in comparison to the dielectric layer. From a mechanical behavior viewpoint, the electrodes should maintain a low Young’s modulus and should have properties as similar as possible to the dielectric material [
21]. Electrodes pastes, such as carbon grease, have nearly no influence on the dielectric layer while being difficult to handle and showing low electrode quality. It is also possible to apply graphite powder without any carrier on the dielectric layer.
The greatest drawback with these kinds of electrodes is that they have poor structural integrity [
20]. Due to the poor adhesion of these electrodes, solid but elastic electrodes are mostly used for the manufacturing of DEA. Elastomer-based electrodes that adhere to the dielectric layer are, in most cases, two-component liquid systems, e.g., silicone with introduced electrical conductive fillers. The main goal is to introduce as few conductive particles as possible inside an elastomeric matrix while keeping a low electrical resistivity. Mostly carbon-based fillers such as carbon nanotubes (CNT) or carbon black (CB) are used for this purpose. In the case of two-component PDMS-elastomers, it is possible to introduce the filler into the resin part before adding the hardening agent.
Additionally, the application method used in order to provide the dielectric layer with electrodes on both sides is of great importance. Different methods such as airbrushing, pad printing, inkjet printing or screen printing are evaluated in [
22,
23,
24]. Screen printing offers great advantages for electrode patterns and usability. Whether the effects of screen printing parameters have an influence on the actuation behavior was investigated by Fasolt et al. [
25]. It could be shown that any such effect is so minimal that it is negligible.
In order to evaluate the material’s behavior and the influence of different surrounding conditions, uniaxial test scenarios were widely used to characterize both the tensile and the compressive behavior of the material [
18,
21,
26].
This publication focuses both on the fabrication of PDMS-based DEA and its mechanical characterization. Material parameters of the dielectric layer were compared to properties of the DEA. Thermal and electrical effects were investigated with respect to their effect on the DEA. Stress–strain relations are evaluated by plotting mechanical hysteresis loops. Finally, results from FEM simulation are compared with experimental results. This characterization approach was also used by various authors in order to evaluate the mechanical and electrical behavior [
14,
17,
18,
19,
26]. The possibility to measure the mechanical, electrical and thermal properties in one description is the main advantage of the proposed characterization.
2. Materials and Methods
2.1. Production Process of DEA
The production process applied in this study is explained in the following. The electrode material was prepared in a two-stage process. An amount of 1.5 wt. % of single-walled CNT NC7000 (Nanocyl SA., Sambreville, Belgium) was added to the resin of Sylgard 184 (Dow Silicones, Wiesbaden, Germany). A premix was prepared inside a dual asymmetric centrifuge DAC 150 (Hauschild GmbH and Co. KG, Hamm, Germany). The predispersed resin with CNT was then processed inside a three-roll-mill EXAKT 80E (EXAKT GmbH, Norderstedt, Germany) with adjustable roll-gaps. A four-stage dispersion was performed with gap sizes starting from 90 µm down to 15 µm. The received resin was then mixed with the hardener in a 1:10 weight ratio and again mixed inside a dual asymmetric centrifuge.
An Elastosil 2030 (Wacker Chemie AG, Munich, Germany) silicone film with a thickness of 200 µm was used as a dielectric layer. The compliant electrodes were applied directly onto the dielectric layer using the screen printing method. This method relies on a mesh to transfer a certain geometry with ink on a substrate. The mesh had a yarn count of 43 cm−1. The screen printing machine Flat DX-100 (Siebdruckversand, Magdeburg, Germany) was used in order to apply the opposite electrodes congruently. The liquid electrode paste was flooded inside the screen with a squeegee with a Shore A hardness of 80. Thermal curing was performed at 50 °C for 24 h to ensure a complete solidification of the electrode ink.
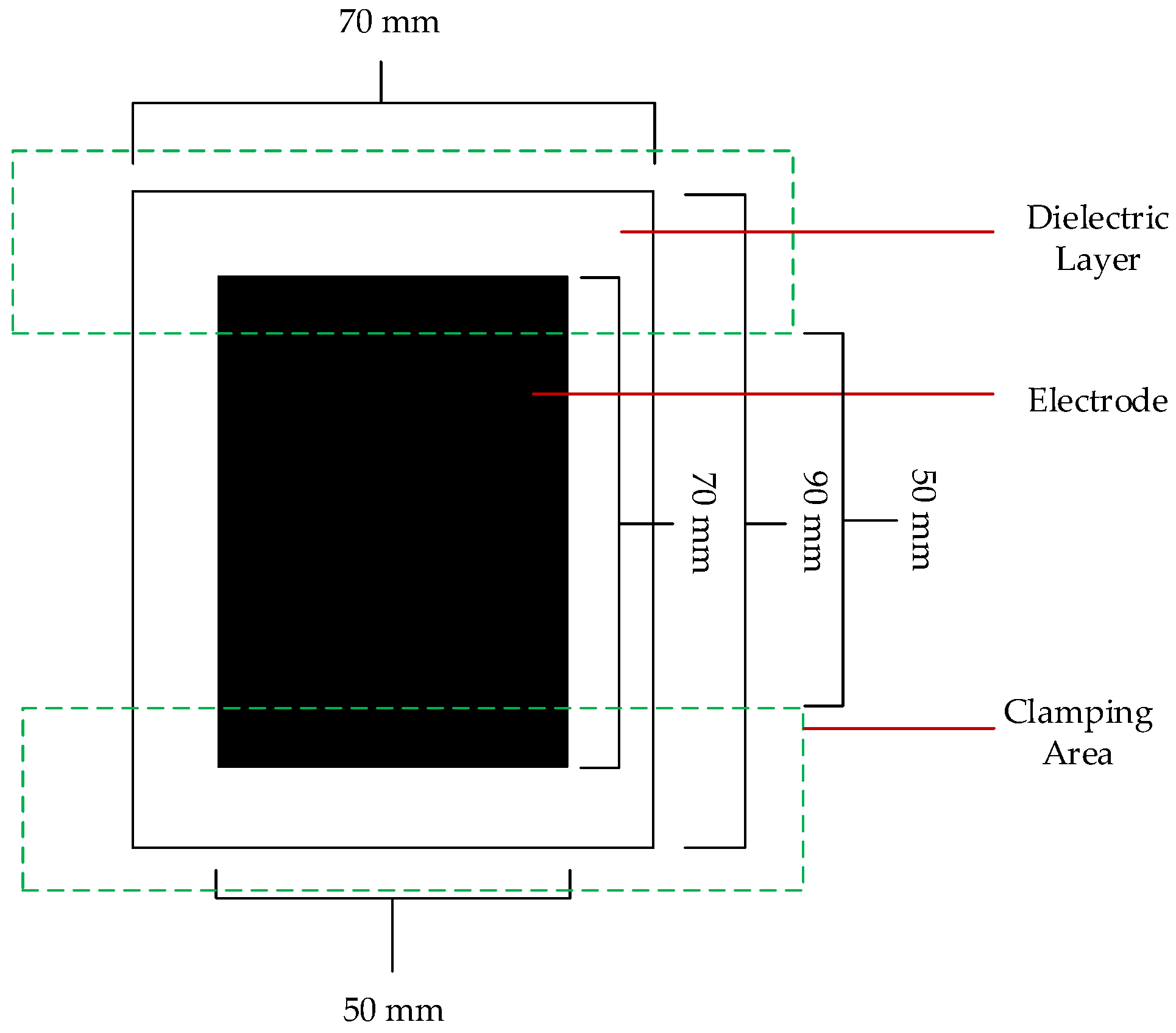
The size of the finished DEA can be seen in
Figure 2. The clamping area is also marked, and it visualizes where the electrodes are in contact with the conducting part of the clamping arrangementThese tailored clamping arrangements were applied to both sides of the DEA in order to ensure adequate functionality of the DEA. The clamping device with the DEA was then slid into the tensile test machine. Overall, the free size of the DEA inside the tensile test machine is 50 mm in height and 70 mm in width, and the free, not clamped electrode is 50 mm × 50 mm in dimensions.
2.2. Test Setup for Thermo-Electro-Mechanical Measurements
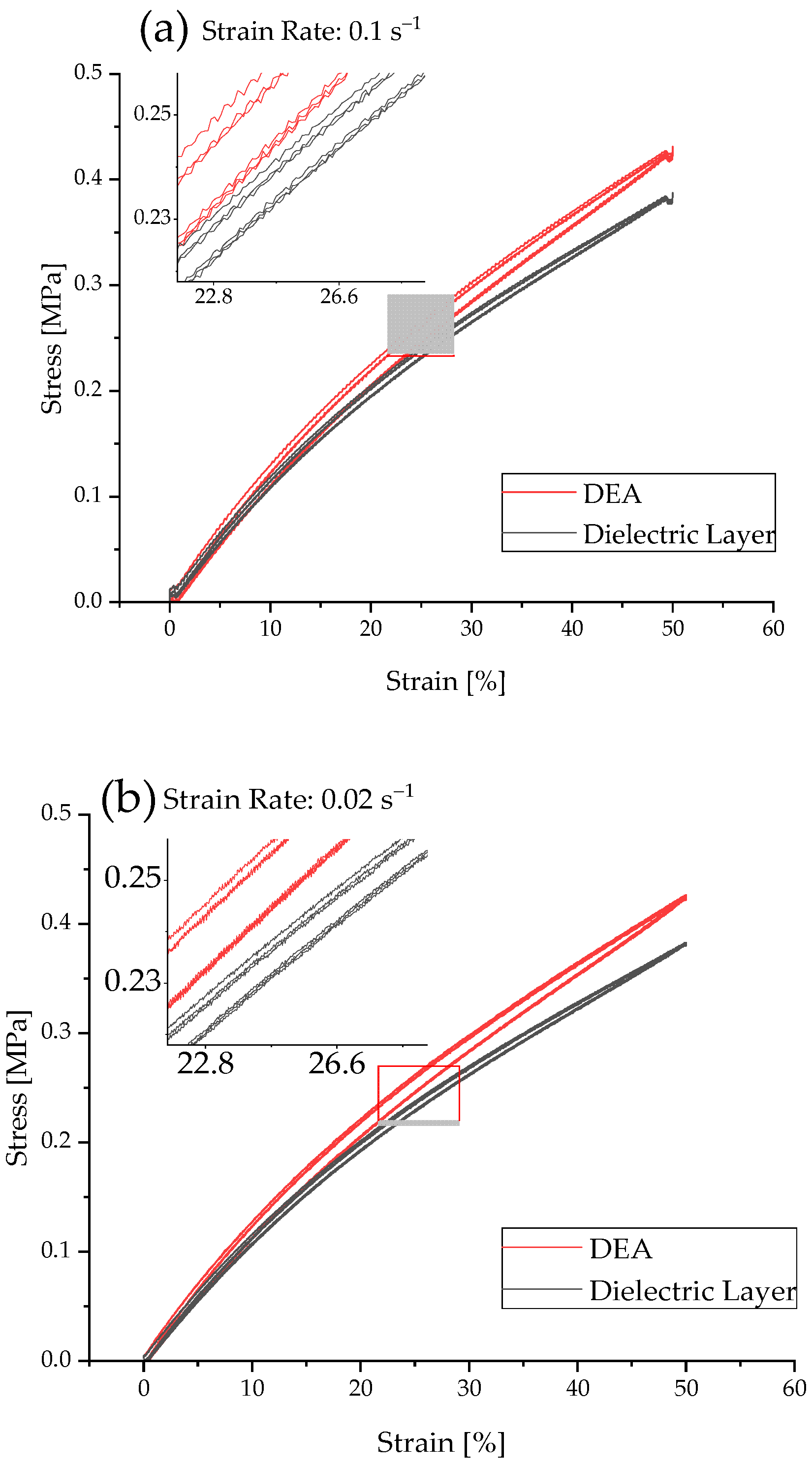
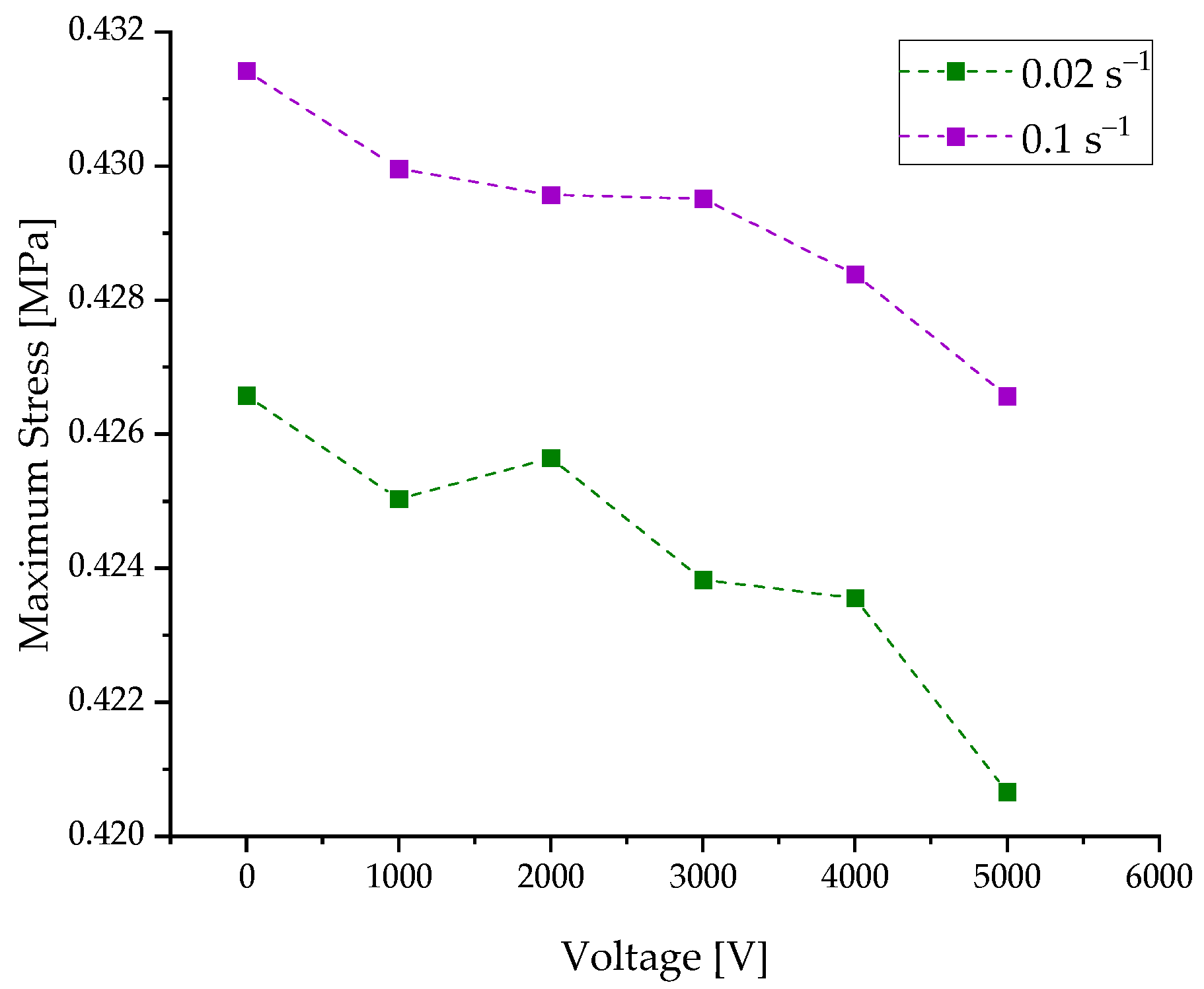
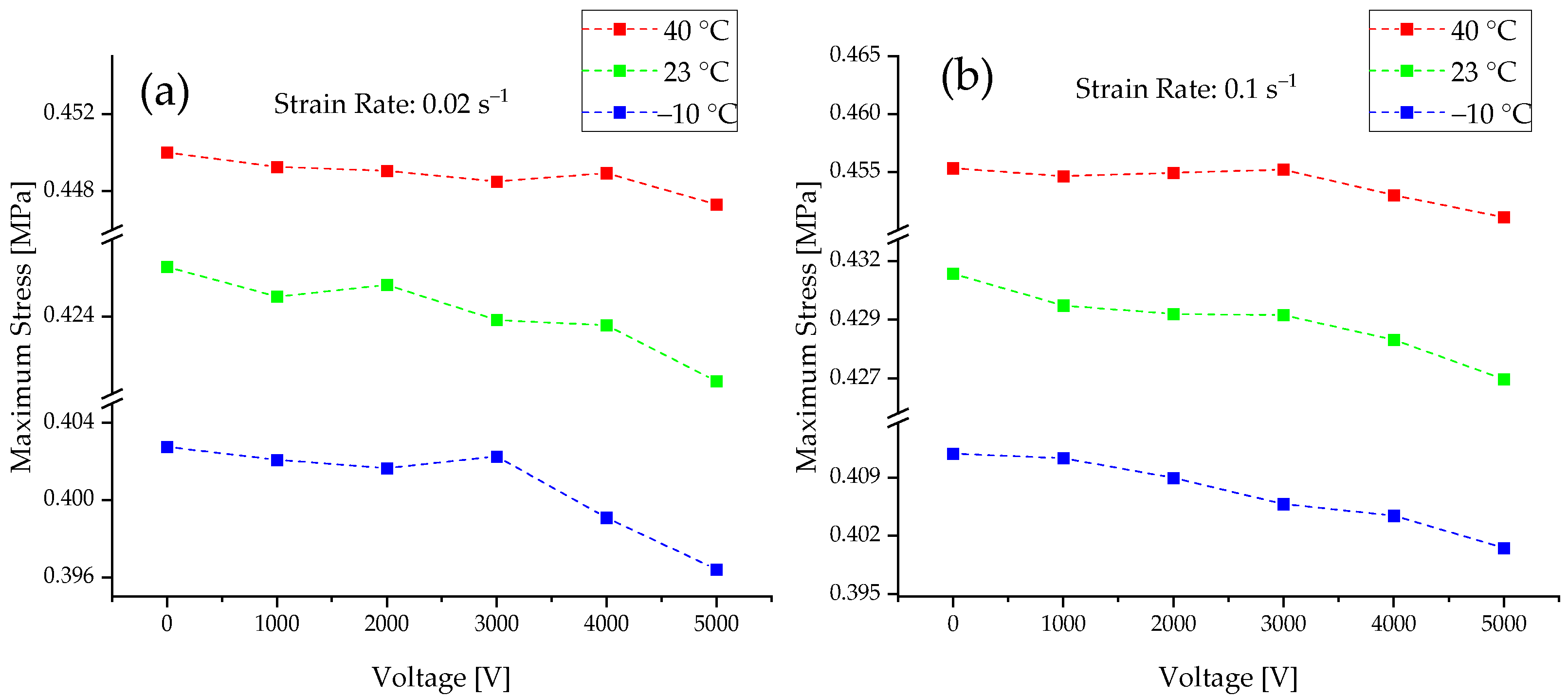
In order to compare the influences of the intrinsic and external influence parameters, different test scenarios were carried out. First, the dielectric layer was examined without an electrode and compared to the behavior of an unactivated DEA with electrodes. Mechanical hysteresis loops were recorded from the DEA at voltages ranging from 0 V to 5000 V in steps of 1000 V. Additionally, the influence of different surrounding temperatures (−10 °C; 23 °C and 40 °C) were tested in a climate chamber Mytron KPK 70 (mytron Bio und Solartechnik GmbH; Heilbad Heiligenstadt, Germany). The mechanical hysteresis loops were evaluated in a tensile test machine Zwick 050 (Zwick and Roell GmbH; Ulm, Germany) at two different strain rates, 0.1 s−1 and 0.02 s−1, with a 100 N force transducer Z6FD1 (HBM, Darmstadt, Germany) with a maximum strain of 50%. Three hysteresis loops were recorded for each test. For a detailed analysis of the mechanical behavior, one of the hysteresis loops applied was analyzed in detail.
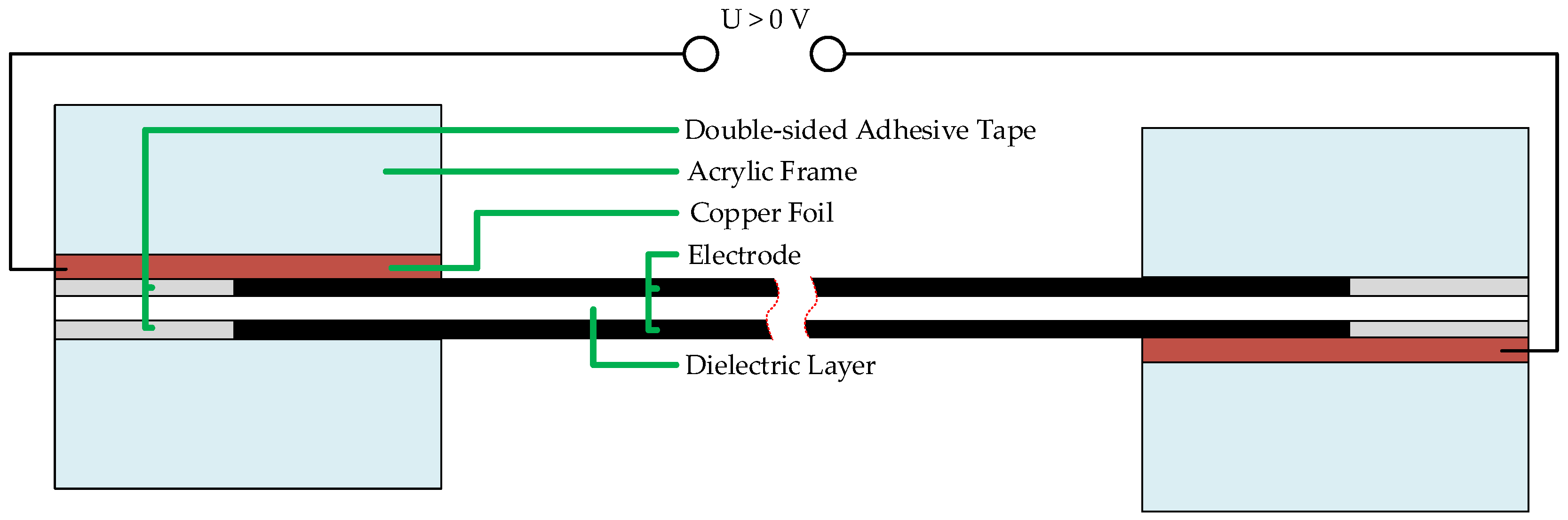
In order to ensure a proper clamping of the DEA inside the tensile test bench, a custom-made clamping jaw was designed. The test setup is shown in
Figure 3. In order to reduce safety risks, the DEA and the electrical contacts had to be isolated against the machine using only non-conducting materials to separate the metal clamps and the sample.
Another important step in clamping the DEA samples was to ensure that clamping pressure applied to the electrodes should be kept as low as possible. Therefore, as visualized in
Figure 4, a special holding device was designed. The adhesion of the DEA to the clamps was achieved using 3M, 91022 (3M, Neuss, Germany) double-sided adhesive tape. The insert with the adhered DEA sample was placed loosely inside the 3D-printed insert holder and carefully tightened with the metallic clamps.
2.3. Finite Element Modelling Approach
The passive behavior of the material is considered viscoelastic, where the mechanical properties are electric-field-dependent. To this end, an electro-viscoelastic material model and the corresponding finite element framework at large deformations were used to simulate the mechanical and electro-mechanical experiment [
27]. A total energy density function
is decomposed into a volumetric part of the equilibrium response
, an isochoric part of the equilibrium response
with an electric field dependency of material parameters, an isochoric part of the non-equilibrium response
and a coupled contribution
as
In Equation (2), is the Jacobian of the deformation gradient, is the total volume-preserving part of the right Cauchy–Green deformation tensor, is the elastic volume-preserving part of the right Cauchy–Green deformation tensor and is the electric field in the reference configuration.
The volumetric response of the material is described by
In Equation (3),
is the bulk modulus of the material. The isochoric hyperelastic response of the material is specified by the extended tube model [
28], which reads
In Equation (4),
is split into a cross-linking part
and a topological tube
with the parameter
that expresses limited chain extensibility and the parameter
that describes topological constraints. Moreover,
denotes the first invariant of the isochoric Cauchy–Green tensor and {
} are the isochoric principal stretches. The material parameters
and
contribute to the total shear modulus of the material and are assumed to be electric field dependent in the form
In Equation (5),
and
are ground state contributions. Moreover,
and
are material parameters that express the dependency of
and
on the electric field
, respectively. A similar approach to the one shown in Equation (5) was used in [
29] to express the dependency of mechanical parameters on the magnetic field and in [
18] to describe the dependency of mechanical parameters on the electric field. For the description of the non-equilibrium behavior, a Neo-Hookean energy expression is specified in terms of the first invariant of the elastic part of the isochoric right Cauchy–Green tensor
as
In Equation (6), the parameter
is the shear modulus related to the non-equilibrium response. The evolution of the elastic part of the deformation can be connected to the rate of inelastic deformation
. Referring to the approach of Bergström and Boyce [
30], the tensor
can be introduced as
In Equation (7),
denotes the effective rate of creep and should be greater than zero (
. The normalized projection tensor
can be introduced as
In Equation (8),
is the viscous Kirchhoff stress. An evolution law for the effective rate of creep rate as suggested in [
1] is adopted. The evolution law takes the form
The evolution law, as shown in Equation (9), depends on and the elastic stretch . Furthermore, the material parameters in Equation (9) are restricted to and .
The electro-mechanically coupled contribution
is specified as
In Equation (10), the parameter
affects the electrical polarization only, and the parameter
influences both electrical polarization and electro-mechanical coupling of the material [
31]. An analytical solution for electro-elasticity with the coupling behavior considered as shown in Equation (10) is detailed in [
32]. A similar description of the coupled contribution as shown in Equation (10) was previously used in combination with a description similar to the one given in Equation (5) to simulate electro-mechanical experiments, where both an electrical field and a mechanical loading are applied simultaneously [
18]. Through presenting several simulation–experimental investigations, it was shown by [
18] that the use of Equations (5) and (10) are adequate to model the associated electro-mechanical experiments at large strain. Regarding the numerical solution, a mixed Q1P0 electro-mechanical finite element formulation was utilized [
27].
4. Summarizing Discussion
At first, several tests were performed in order to show the effect of the electrode on the dielectric layer. The results are similar to the experimental findings of Kleo et al. [
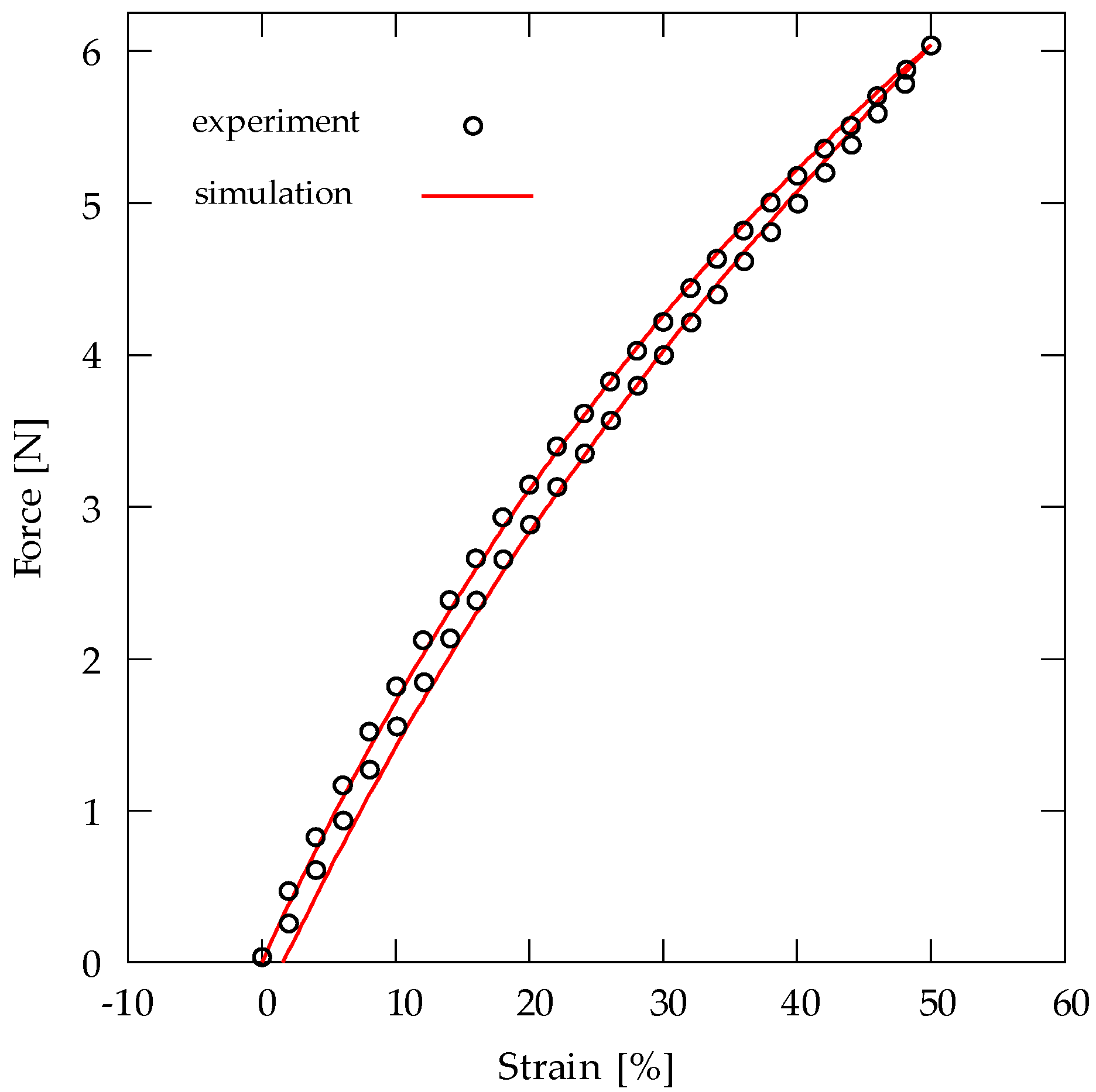
33], who concluded that the existence of electrodes on the dielectric layer leads to an increase in stiffness. Additionally, the results show the effect of different temperatures on the voltage-dependent, active behavior of DEA as well as strain rate dependencies of maximum stress values and mechanical hysteresis loops. Increasing temperature leads to a raised stress level. This is mostly explained by exothermic processes during the occurrence of chain entanglement. With increasing voltage, the maximum stress at the end of the loading cycle decreases. This is caused by the electrostatic pressure that builds up between the activated electrode and the equibiaxial force, which also acts in the direction of the load path. This lowers the amount of force needed to elongate the material until a fixed elongation is reached. The correlation between simulation and experimental data shows a good overall alignment of the data. With some exceptions, the modeling approach for the FEM simulation is suitable. Minor discrepancies will need to be examined in more detail in the future but are probably a result of deviations of the experimental results due to the test setup and imperfections in the DEA. One of the main limitations of the proposed characterization is the uniaxial test setup. In order to measure the equibiaxial behavior, a different characterization method needs to be used, where the force path has to be introduced in all planar directions equally.
An elongation of 50% strain is relatively low compared to other publications [
17,
18] but can be explained by a rather high default rate and electric breakdown of the DEA at higher strains. The experiments were also repeated for higher elongations of up to 120%. However, the default rate was too high in order to continue the experiments. Only lower elongations resulted in an acceptable failure rate. In future experiments, the film thickness of the dielectric layer should be decreased, which would lead to a higher electro-mechanical coupling, but at the same time, increase the risk of an electrical breakdown. It is also expected that, with higher maximum strain and decreased dielectric layer thickness, the simulation results fit the experimental data better because the effect of the electro-mechanical coupling becomes bigger. Therefore, the deviations caused by the test setup can become smaller, and especially in areas with low voltage, the methodical error influence decreases. Future research should additionally focus on extending the thermal ranges. Temperatures above 40 °C and below −10 °C should show the effect seen in
Figure 6 even more prominently.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}