
Characterization of Bond Fracture in Discrete Groove Wear of Cageless Ball Bearings

Abstract
:1. Introduction
2. Methods
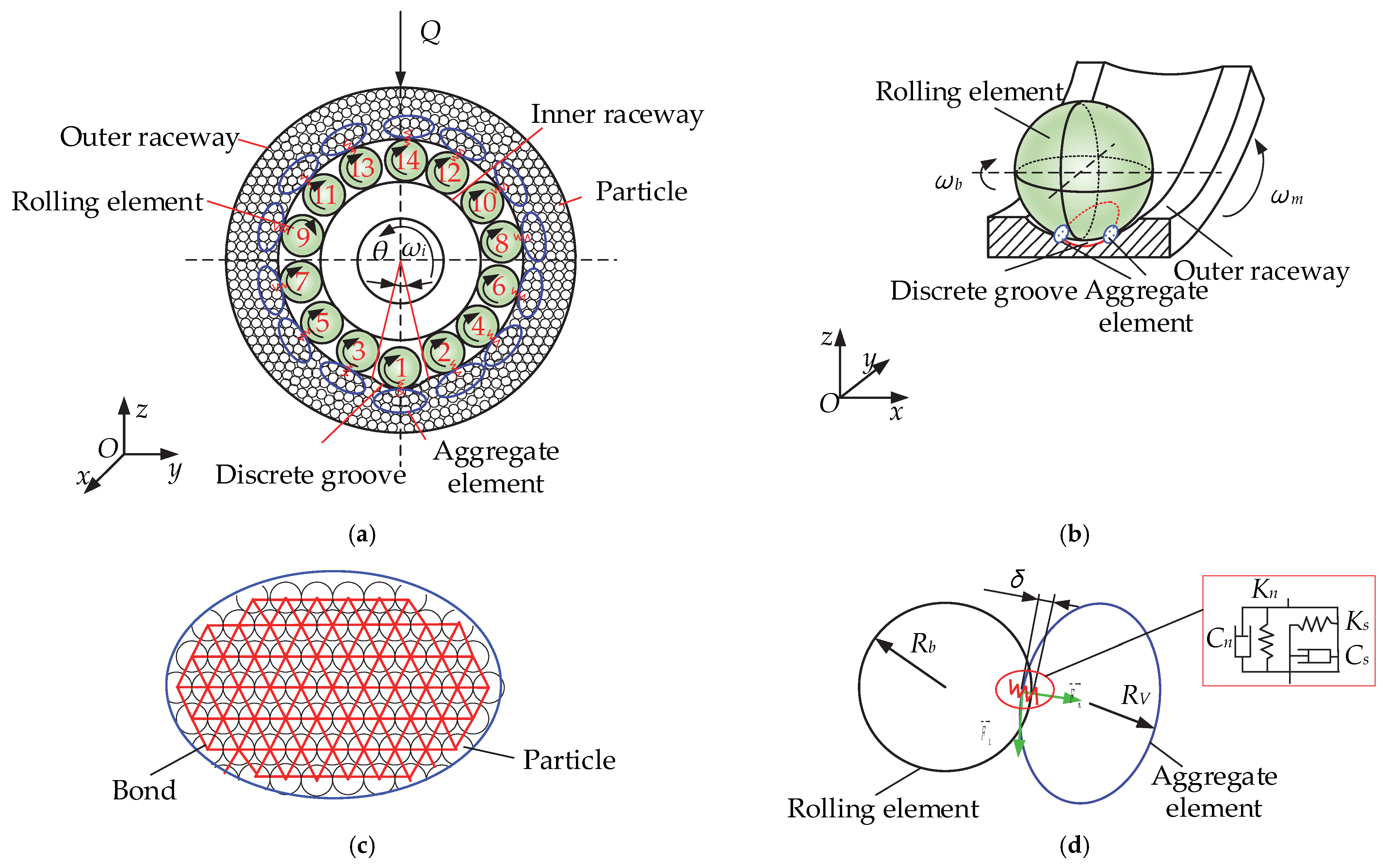
2.1. DEM Model of a Cageless Ball Bearing
2.1.1. Contact Model of the Rolling Element and Aggregate Element
2.1.2. Model for Bond Fracture of Raceway Particles
2.2. Wear Study of Ball Bearings without a Cage
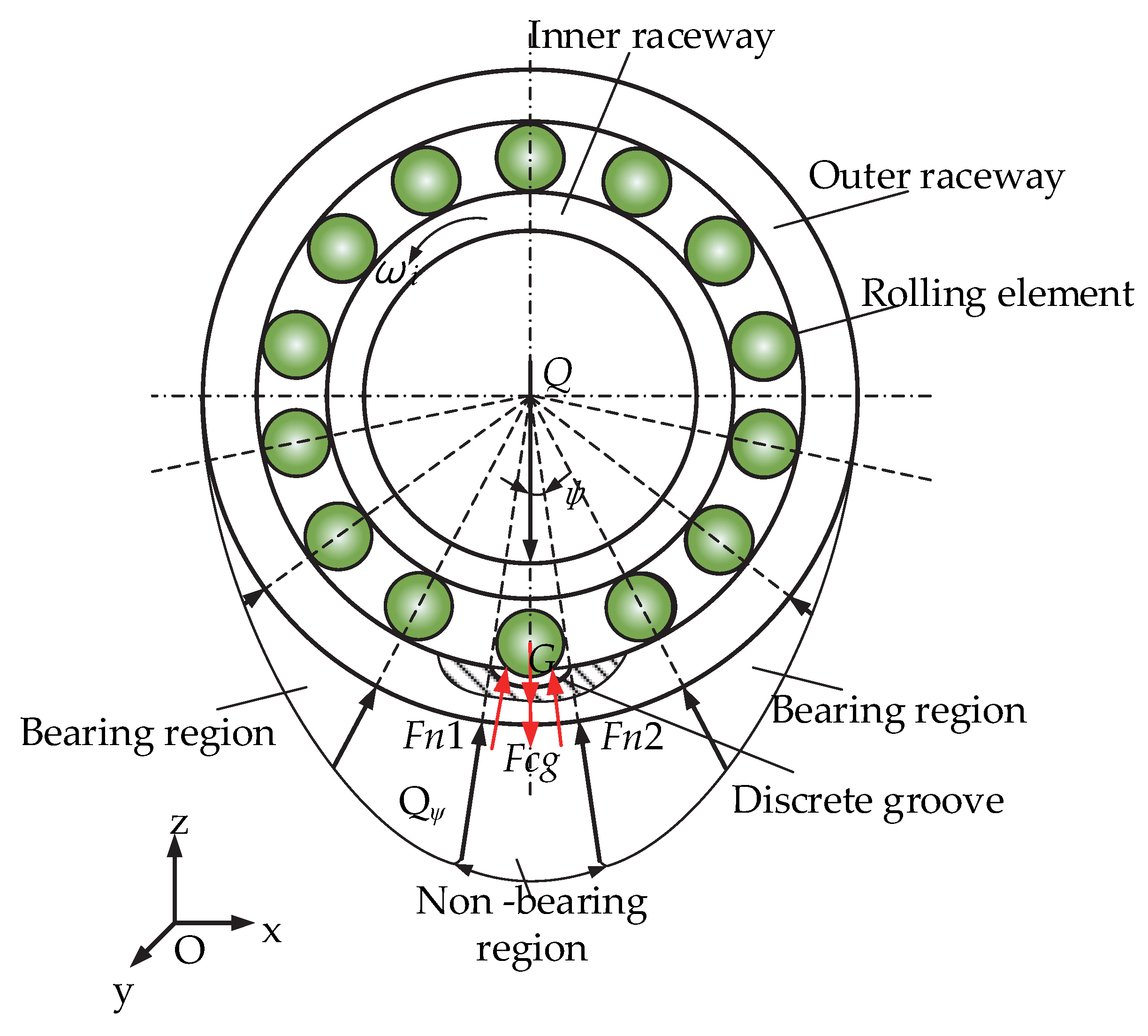
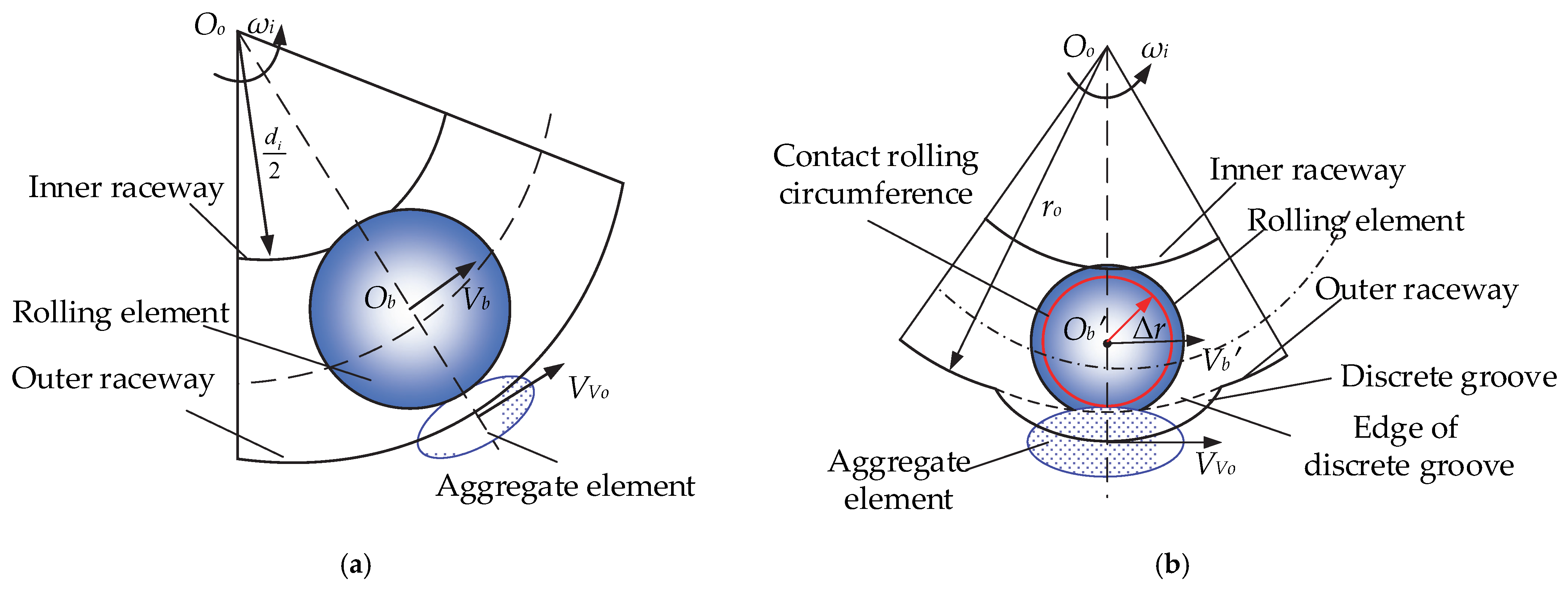
2.2.1. Analysis of External Forces in Particle Systems
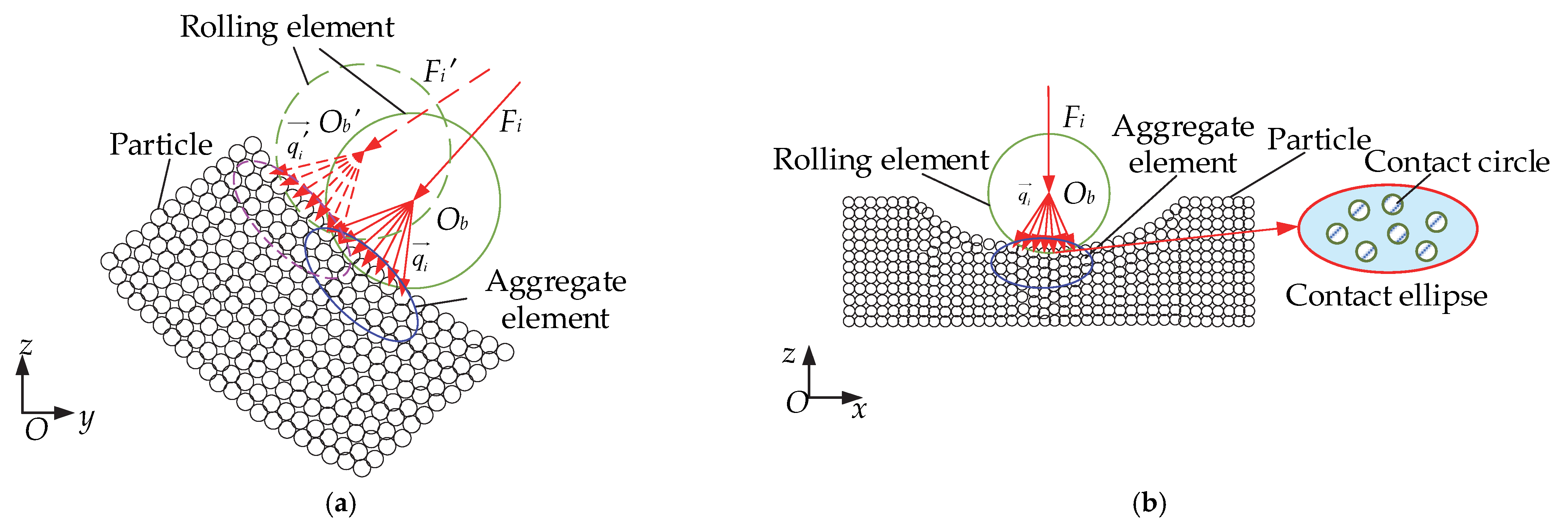
2.2.2. Analysis of the Internal Force Transfer in a Raceway Particle System
- The transmission of tangential forces between two particles is not considered;
- Since the lateral forces balance each other, only the transmission of the vertical component of the internal force is considered;
- The displacement and deformation of particles do not change the force transfer characteristics.
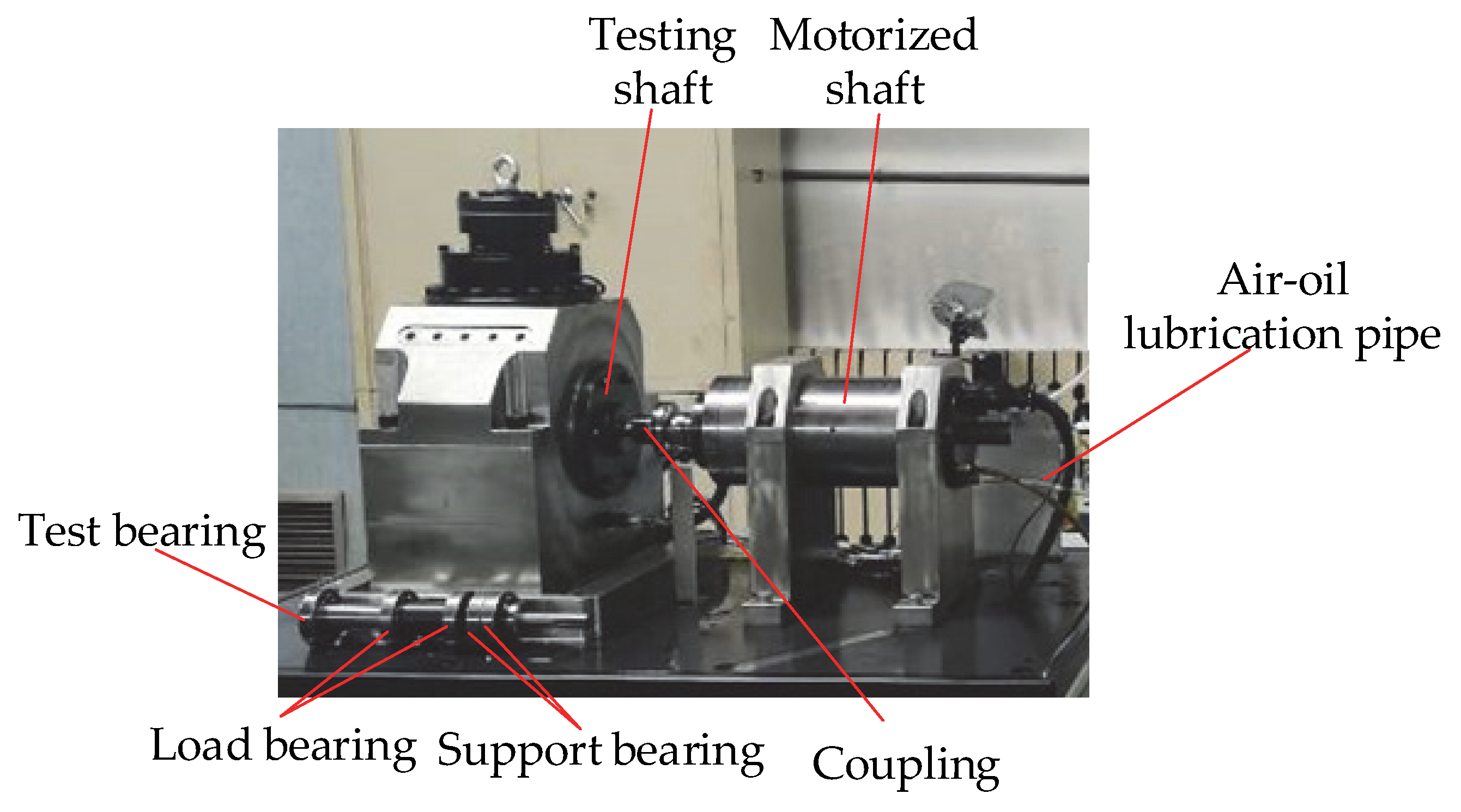
3. Experimental
4. Results and Discussion
4.1. External Force
4.2. Internal Force
4.2.1. Initial Force
4.2.2. Force after Transmission
4.3. Experimental Results
5. Conclusions
- Using the discrete element method, the bearing discrete groove can be discretized into particles, and the particles are interconnected using bonds. Then, the wear of discrete groove was characterized by bond fracture. The feasibility of DEM in wear field is verified by theoretical and experimental analysis.
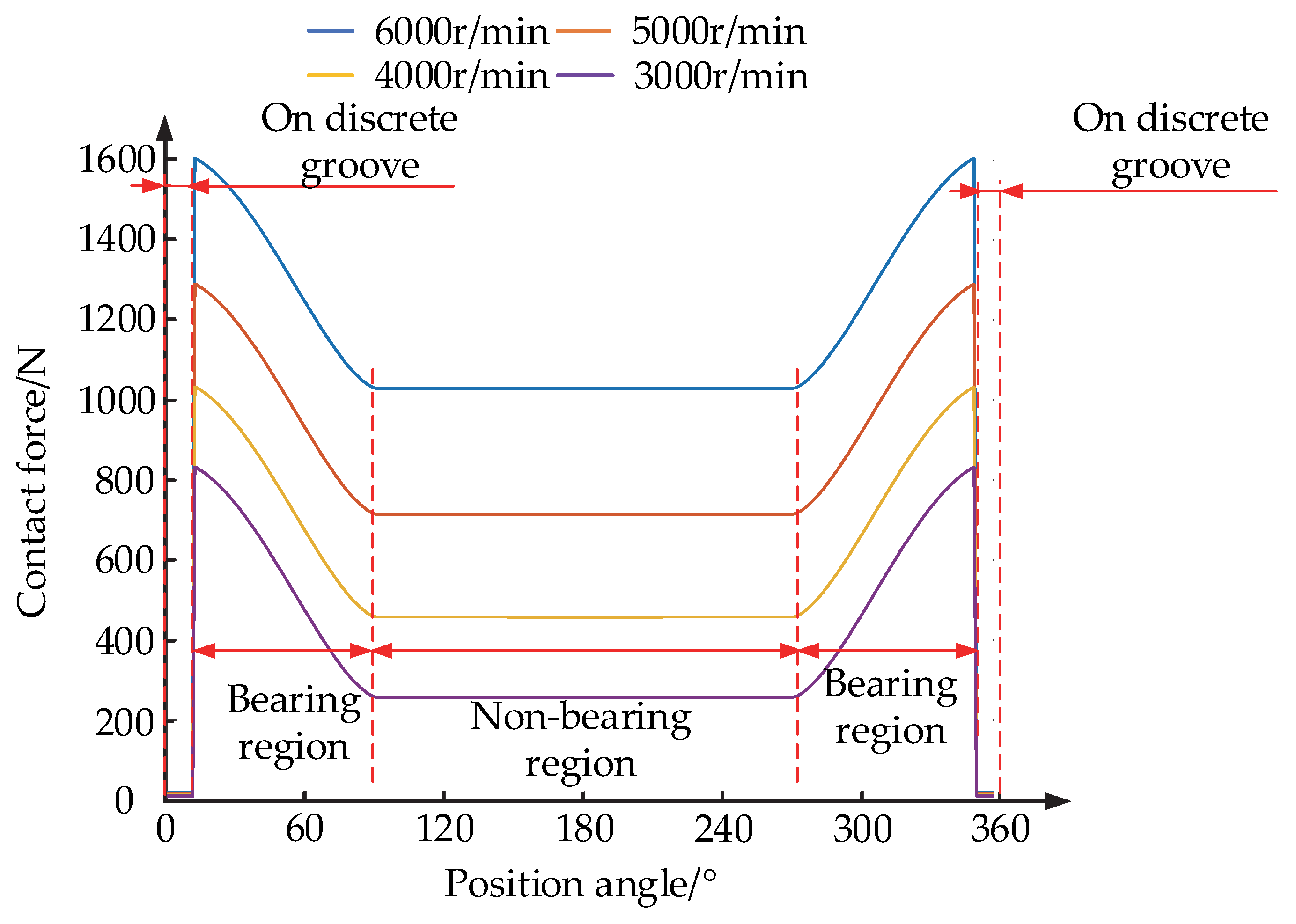
- Since the rolling element on the discrete groove does not carry and makes contact with two points, the contact force between the rolling body and the aggregate element is the smallest, the contact force with the bearing area of the raceway is the largest, and the contact force is greater with and closer to the discrete groove.
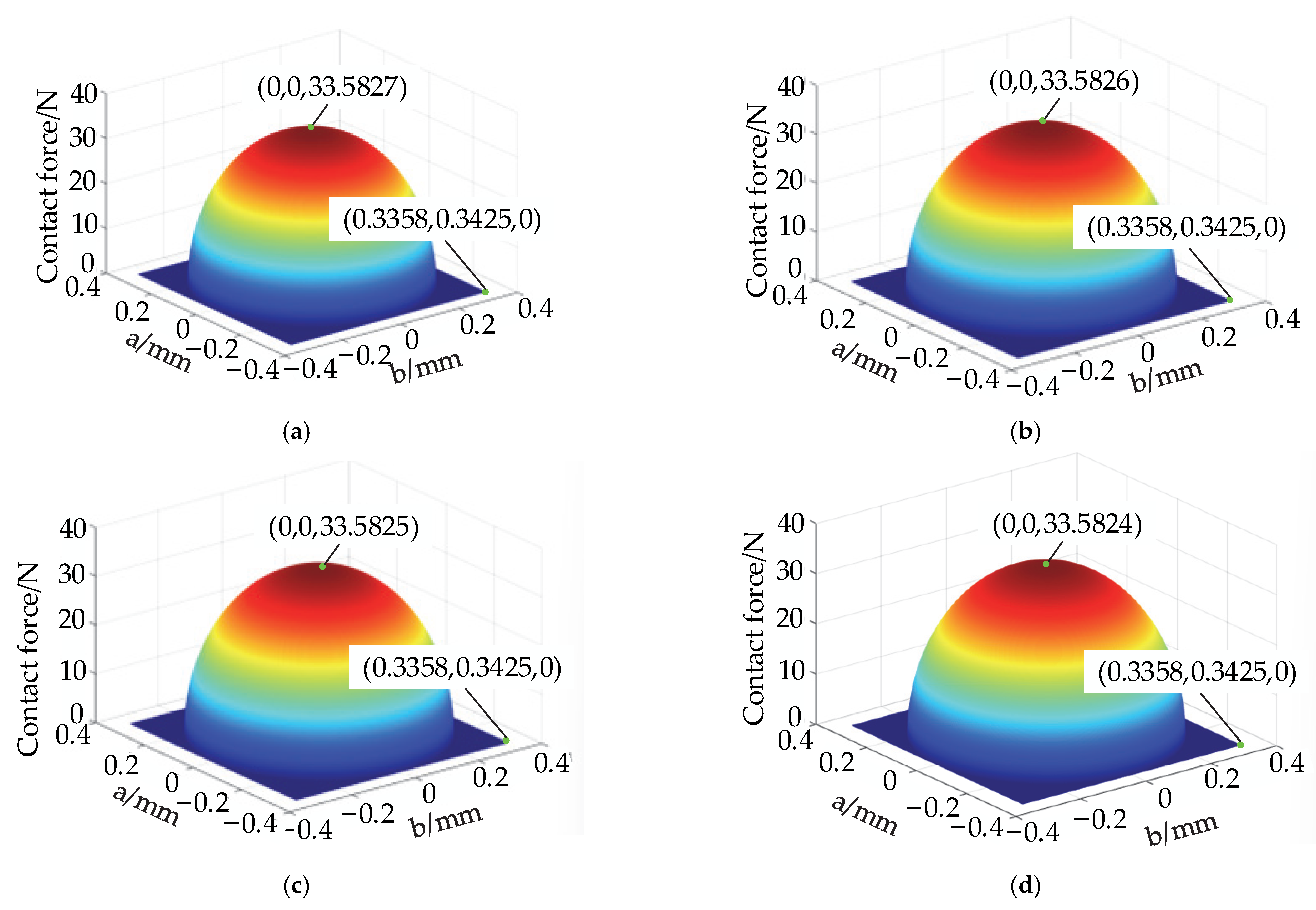
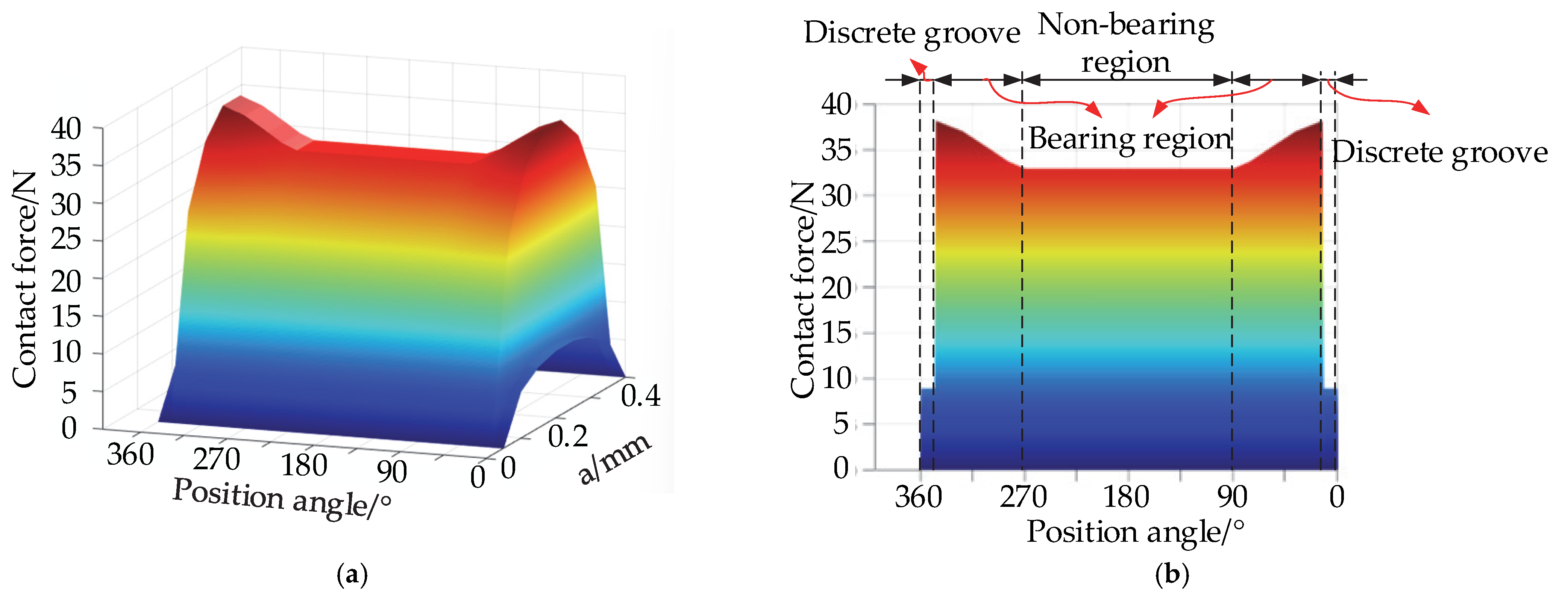
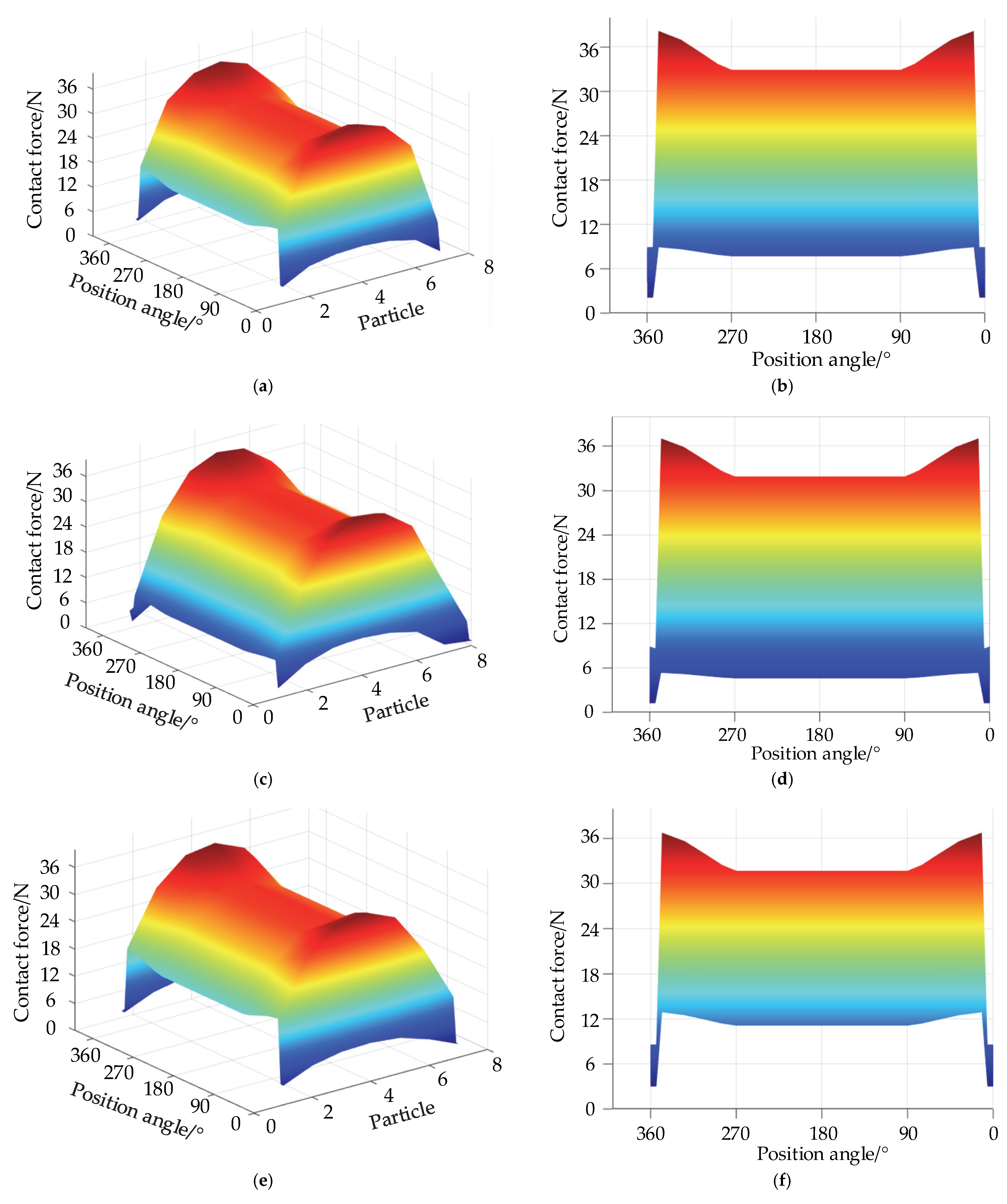
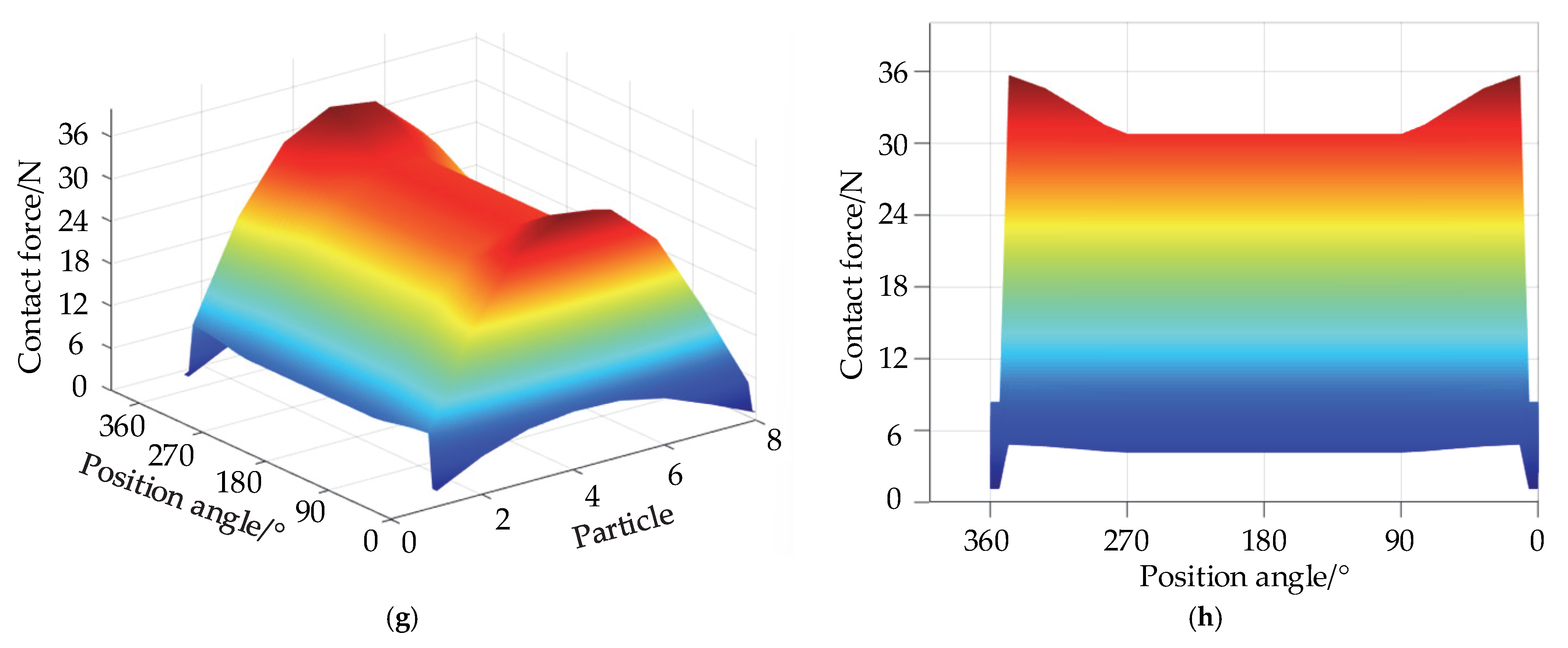
- Within the particle system, as the number of transfer layers increases, the internal force on the particles gradually decreases. In each layer of particles, the particles at the discrete groove are subjected to the least force, the particles in the load-bearing zone are subjected to the greatest force, and at any position on the raceway, the particles at the very center of the contact ellipse are subjected to the greatest force.
- The bond in the bearing discrete element model has bonding force. When the internal force transferred to the two particles under the external load is bigger than the initial bonding force, the bond will break. When the internal force on the particle is greater than 36.5558 N, the bond breaks, and the bearing wears out; otherwise, the bearing does not wear out.
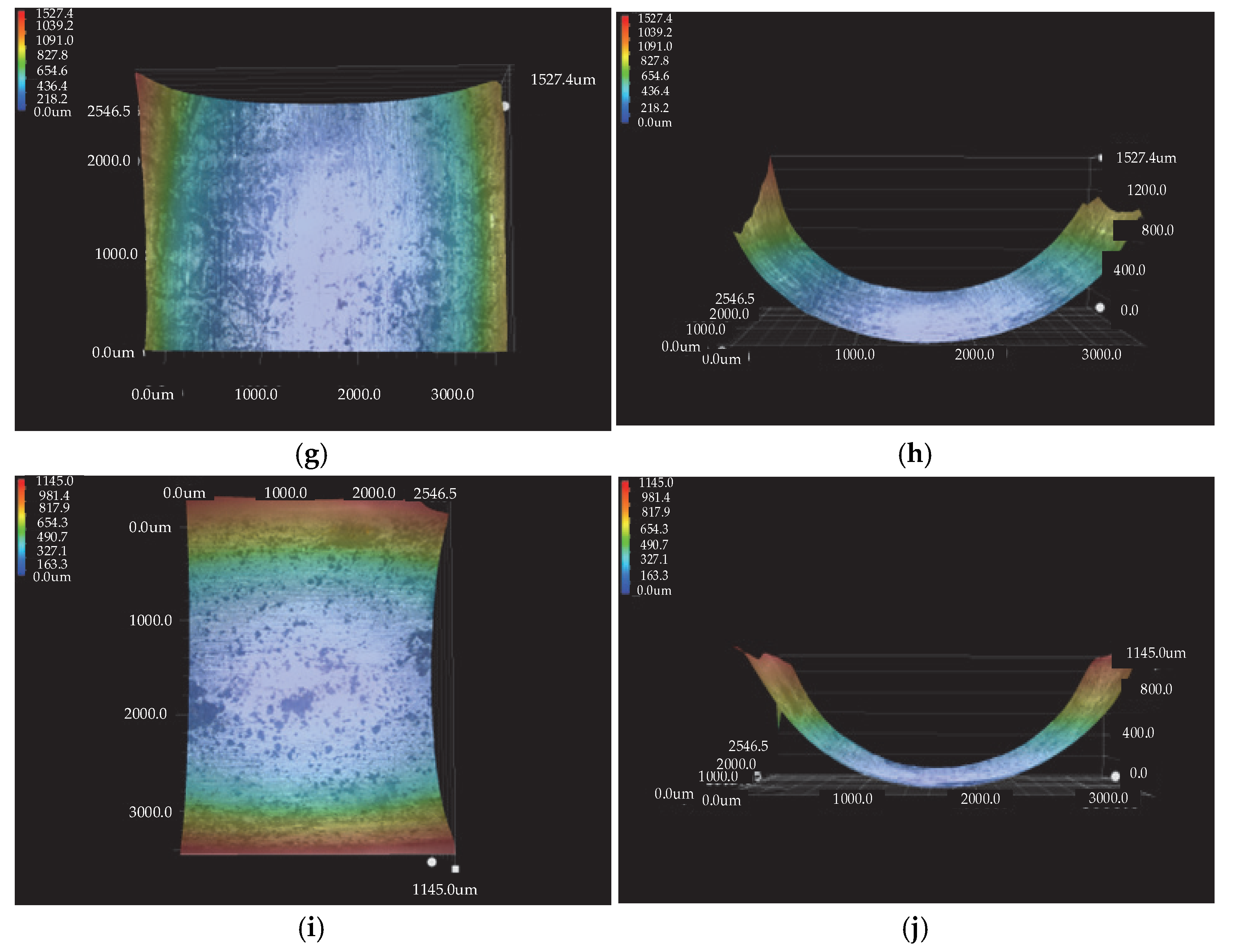
- The wear of ball bearings without a cage increases as the speed of the inner ring and the radial load increase, and the influence of speed on wear is greater than that of the load. The most likely wear area is in the bearing area on the entire outer raceway and the least likely wear area is in the discrete grooves.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, Y.L.; Wang, Q.Y.; Wang, M.Z.; Pan, C.Y.; Bao, Y.D. Discrete Theory of Rolling Elements for a Cageless Ball Bearing. J. Mech. Sci. Technol. 2022, 36, 1921–1933. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Zhao, Y.L.; Wang, M.Z. Analysis of Contact Stress Distribution between Rolling Element and Variable Diameter Raceway of Cageless Bearing. Appl. Sci. 2022, 12, 5764. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Zhang, J.W.; Zhou, E.N. Automatic Discrete Failure Study of Cage Free Ball Bearings Based on Variable Diameter Contact. J. Mech. Sci. Technol. 2021, 35, 4943–4952. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, H.; Chang, W.; Xi, H.; Pei, S.Y.; Meng, W.; Li, H.W.; Xu, S.N. A Dynamic Contact Wear Model of Ball Bearings without or with Distributed Defects. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 4827–4843. [Google Scholar] [CrossRef]
- Fu, X.Y.; Wei, L.; Zhang, Y.; Li, S. Comparative Study of Bearing Wear in Spindle System at Different Working Conditions. Mech. Based Desing Struct. Mach. 2022. [Google Scholar] [CrossRef]
- Li, B.; Wang, M.S.; Gantes, C.J.; Tan, U.X. Modeling and Simulation for Wear Prediction in Planar Mechanical Systems with Multiple Clearance Joints. Nonlinear Dyn. 2022, 108, 887–910. [Google Scholar] [CrossRef]
- Holm, R. Electrical Contacts, Chapter Frictional Wear in Metallic Contacts without Current; Springer: Berlin/Heidelberg, Germany, 1946; pp. 232–242. [Google Scholar]
- Aghababaei, R.; Zhao, K. Micromechanics of Material Detachment During Adhesive Wear: A Numerical Assessment of Archard’s Wear Model. Wear 2021, 476, 203739. [Google Scholar] [CrossRef]
- Lawn, B.R.; Borrero, L.O.; Huang, H.; Zhang, Y. Micromechanics of Machining and Wear in Hard and Brittle Materials. J. Am. Ceram. Soc. 2020, 104, 5–22. [Google Scholar] [CrossRef]
- Yang, D.; He, Q.C. Micromechanical Estimation of the Effective Wear of Elastoplastic Fiber-reinforced Composites. Int. J. Non-Linear Mech. 2018, 108, 11–19. [Google Scholar] [CrossRef]
- Foster, D.; Paladugu, M.; Hughes, J.; Kapousidou, M.; Barcellini, C.; Daisenberger, D.; Jimenez, M.E. Comparative Micromechanics Assessment of High-carbon Martensite/Bainite Bearing Steel Microstructures Using in-situ Synchrotron X-ray Diffraction. Materialia 2020, 14, 100948. [Google Scholar] [CrossRef]
- Lindroos, M.; Anen, A.; Andersson, T. Micromechanical Modeling of Polycrystalline High Manganese Austenitic Steel Subjected to Abrasive Contact. Friction 2020, 8, 626–642. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D. A Discrete Element Model for Granular Assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Machado, C.; Guessasma, M.; Bellenger, E. An Improved 2D Modeling of Bearing Based on DEM for Predicting Mechanical Stresses in Dynamic. Mech. Mach. Theory 2017, 113, 53–66. [Google Scholar] [CrossRef]
- Ma, L.Y.; Xie, T.; Chen, Y.J.; Chen, K. Numerical Simulation of the Effect of Graphite Content on the Friction Characteristics of Copper-based Sliding Bearing Materials. Bearing 2021, 3, 26–30+35. [Google Scholar]
- Zhao, B.Q.; Gu, M.L.; Liu, R. Failure Mechanism Analysis of Al2O3-based Ceramic Tools Based on the Discrete Element Method. Tool Technol. 2018, 52, 100–104. [Google Scholar]
- Zhang, R.; Chen, G.M.; Fan, W.F. Simulation on the Wear Behavior of the Wear-Resistant Surfaces Using Discrete Element Method. Adv. Mater. Res. 2011, 1168, 729–733. [Google Scholar] [CrossRef]
- Józef, H.; Joanna, W.; Piotr, P.; Mateusz, S.; Maciej, B.; Rafał, K.; Marek, M. Discrete Element Method Modelling of the Diametral Compression of Starch Agglomerates. Materials 2020, 13, 932. [Google Scholar]
- Feng, R.Q.; Zhu, B.C.; Hu, C.C.; Wang, X. Simulation of Nonlinear Behavior of Beam Structures Based on Discrete Element Method. Int. J. Steel Struct. 2019, 19, 1560–1569. [Google Scholar] [CrossRef]
- Horabik, J.; Bańda, M.; Józefaciuk, G.; Adamczuk, A.; Polakowski, C.; Stasiak, M.; Parafiniuk, P.; Wiącek, J.; Kobyłka, R.; Molenda, M. Breakage Strength of Wood Sawdust Pellets: Measurements and Modelling. Materials 2021, 14, 3273. [Google Scholar] [CrossRef]
- Shilko, E.V.; Psakhie, S.G.; Schmauder, S.; Popov, V.L.; Astafurov, S.V.; Smolin, A.Y. Overcoming the Limitations of Distinct Element Method for Multiscale Modeling of Materials with Multimodal Internal Structure. Comput. Mater. Sci. 2015, 102, 267–285. [Google Scholar] [CrossRef]
- Smolin, A.; Shilko, E.; Grigoriev, A.; Moskvichev, E.; Fillipov, A.; Shamarin, N.; Dmitriev, A.; Nikonov, A.; Kolubaev, E. A Multiscale Approach to Modeling the Frictional Behavior of the Materials Produced by additive Manufacturing Technologies. Contin. Mech. Thermodyn. 2022, accepted. [Google Scholar] [CrossRef]
- Sun, Q.C.; Wang, G.Q. Introduction to the Mechanics of Particulate Matter, 1st ed.; Shen, J., Ed.; Science Press: Beijing, China, 2009; Volume 1, pp. 32–35+73. [Google Scholar]
- Fu, L.; Zhou, S.; Guo, P. Induced Force Chain Anisotropy of Cohesionless Granular Materials during Biaxial Compression. Granul. Matter. 2019, 21, 52. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J.; Zhang, X. Quantitative Investigation on Force Chain Lengths during High Velocity Compaction of Ferrous Powder. Mod. Phys. Lett. B 2019, 33, 1950113. [Google Scholar] [CrossRef]
- Meng, F.J.; Liu, H.B.; Hua, S.Z.; Pang, M.H. Force Chain Characteristics of Dense Particles Sheared Between Parallel-plate Friction System. Results Phys. 2021, 25, 104328. [Google Scholar] [CrossRef]
- Liu, C.; Pan, L.; Wang, F. Three-dimensional Discrete Element Analysis on Tunnel Face Instability in Cobbles Using Ellipsoidal Particles. Materials 2019, 12, 3347. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.Y.; Miao, T.D.; Lu, J.B. A Probabilistic Model of Force Transfer in A Two-dimensional Particle Stack. J. Geotech. Eng. 2006, 7, 881–885. [Google Scholar]
- Jiang, H.Y.; Lu, J.B.; Liu, S.H. Analysis of Load Force Diffusion Processes in Granular Media Stacks. J. Lanzhou Univ. Technol. 2006, 2, 127–130. [Google Scholar]
- Miao, T.D.; Yi, C.H.; Qi, Y.L.; Mu, Q.S.; Liu, Y. Study of Force Transfer in Hexagonal Dense-row Accumulations of Spherical Particles under the Action of Concentrated Forces. J. Phys. 2007, 8, 4713–4721. [Google Scholar]
- Zhang, X.G.; Dai, D. Lattice Point System Model for Pressure Problems in Two-dimensional Particle Accumulation. J. Phys. 2017, 66, 154–162. [Google Scholar]
- Sun, Y.F.; Zheng, X.W.; He, F.Q.; Liu, X.D.; Qian, C.G. Application of a Two-dimensional Particle Stack Force Transfer Model to an Integrated System for Jaw Crusher Design Analysis. Coal Min. Mach. 2021, 42, 129–132. [Google Scholar]
- Popov, V.L. Contact Mechanics and Friction Physical Principles and Applications, 1st ed.; Li, Q., Ed.; Tsinghua University Press: Beijing, China, 2011; Volume 1, pp. 48–49. [Google Scholar]
- Zhao, Q. Study on Stress Transferring Law of Regularly Arranged Lightweight Spherical Materials Subgrade. Master’s Thesis, Harbin Institute of Technology, Harbin, China, June 2016. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Piece | Radial Load/N | Inner Raceway Speed/rpm | Experiment Time/h | Lubrication Status |
|---|---|---|---|---|
| 1 | 2000 | 3000 | 3 | dry friction |
| 2 | 2000 | 4000 | 3 | dry friction |
| 3 | 2000 | 5000 | 3 | dry friction |
| 4 | 2000 | 6000 | 3 | dry friction |
| 5 | 2500 | 4000 | 3 | dry friction |
| 6 | 3000 | 4000 | 3 | dry friction |
| Parameters | Numerical Values |
|---|---|
| Inner raceway speed ωi/(r/min) | 3000~6000 |
| Test Piece | Mass before Wear/g | Mass after Wear/g | Wear Weight/mg | Wear Rate |
|---|---|---|---|---|
| 1 | 97.8781 | 97.8761 | 2 | 2.0434 × 10−5 |
| 2 | 97.7477 | 97.7445 | 3.21 | 3.284 × 10−5 |
| 3 | 97.0451 | 97.0383 | 6.82 | 7.0277 × 10−5 |
| 4 | 97.6655 | 97.6569 | 8.61 | 8.8158 × 10−5 |
| 5 | 97.6569 | 97.6529 | 3.98 | 4.0755 × 10−5 |
| 6 | 97.0384 | 97.0337 | 4.67 | 4.8125 × 10−5 |
| Test Piece | Wear Depth |
|---|---|
| 1 | 0.3011 |
| 2 | 0.30236 |
| 3 | 0.3547 |
| 4 | 0.3651 |
| 5 | 0.33547 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Jin, Y.; Pan, C.; Wu, C.; Yuan, X.; Zhou, G.; Han, W. Characterization of Bond Fracture in Discrete Groove Wear of Cageless Ball Bearings. Materials 2022, 15, 6711. https://doi.org/10.3390/ma15196711
Zhao Y, Jin Y, Pan C, Wu C, Yuan X, Zhou G, Han W. Characterization of Bond Fracture in Discrete Groove Wear of Cageless Ball Bearings. Materials. 2022; 15(19):6711. https://doi.org/10.3390/ma15196711
Chicago/Turabian StyleZhao, Yanling, Yuan Jin, Chengyi Pan, Chuanwang Wu, Xueyu Yuan, Gang Zhou, and Wenguang Han. 2022. "Characterization of Bond Fracture in Discrete Groove Wear of Cageless Ball Bearings" Materials 15, no. 19: 6711. https://doi.org/10.3390/ma15196711