
Thermal–Optical Evaluation of an Optimized Trough Solar Concentrator for an Advanced Solar-Tracking Application Using Shape Memory Alloy

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
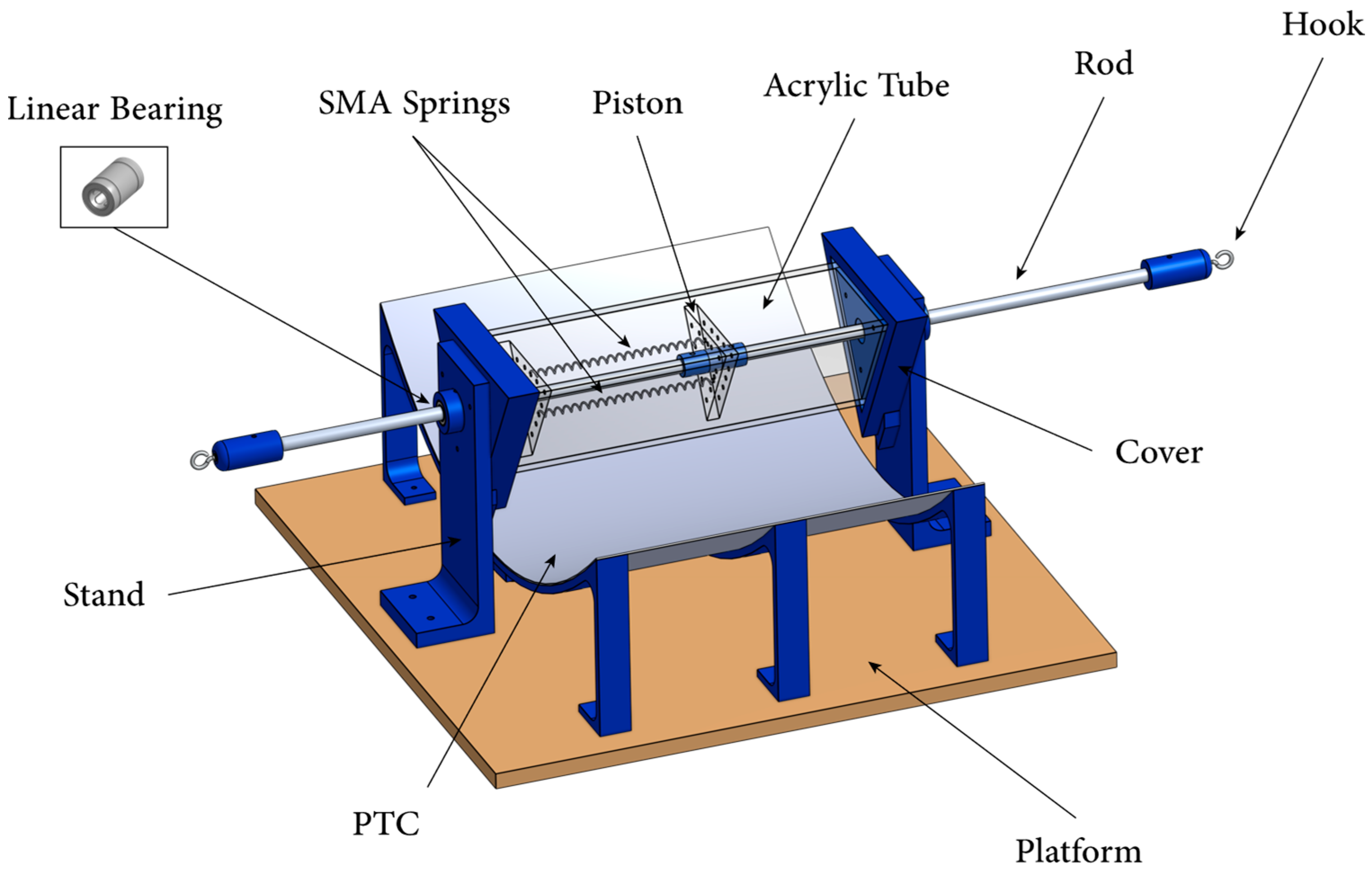
2.1. Overview
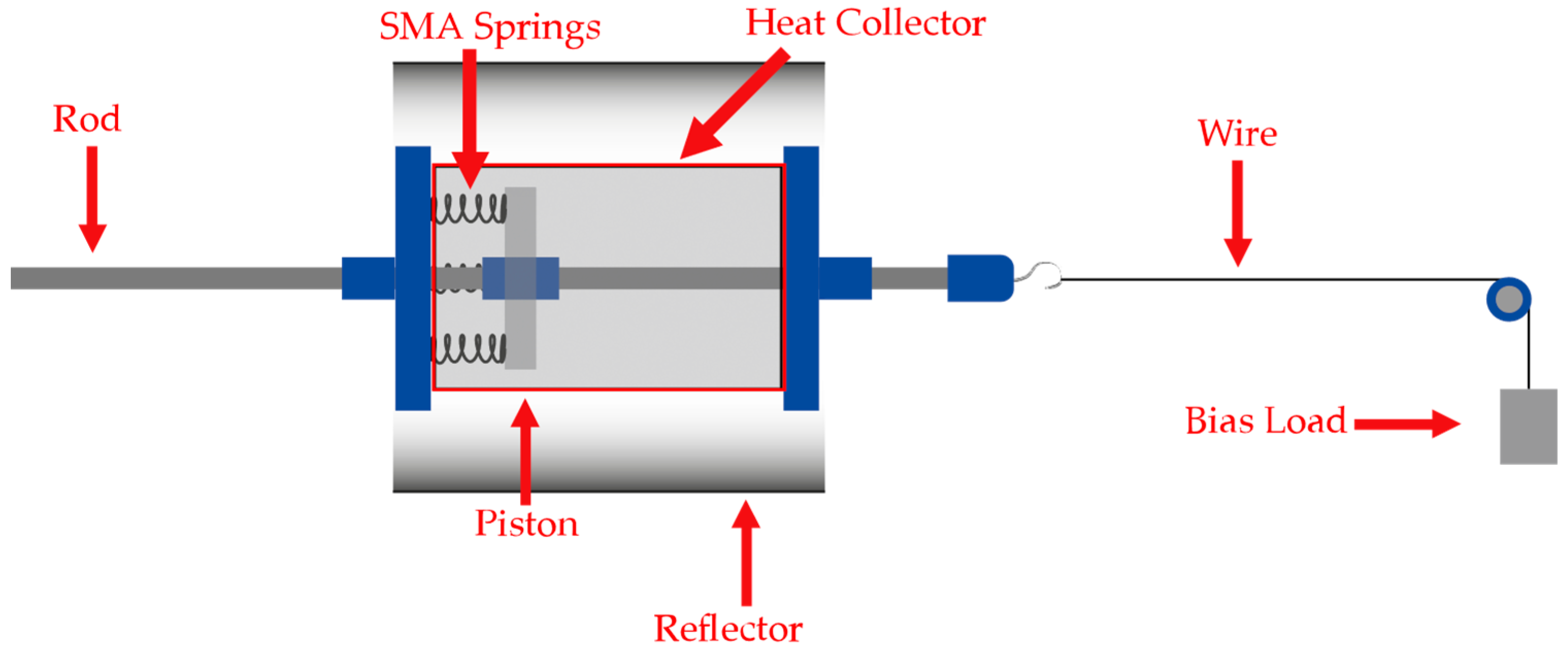
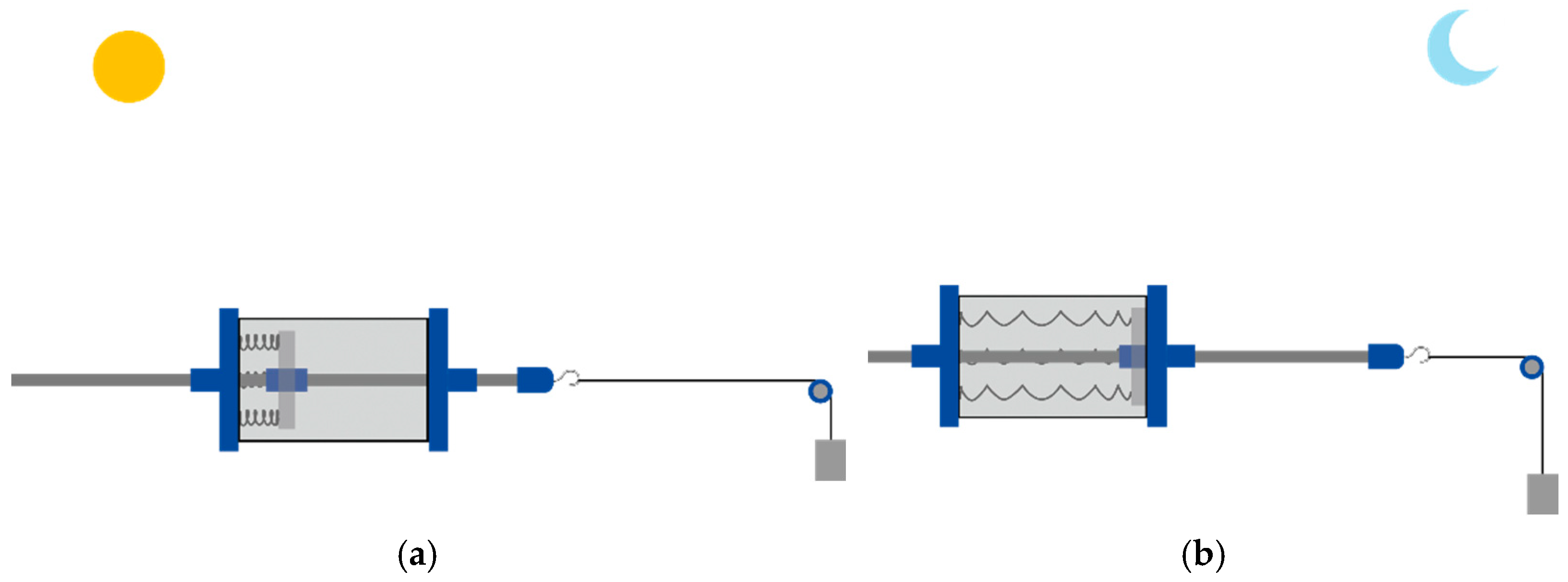
2.2. SMA Actuator Conceptual Design
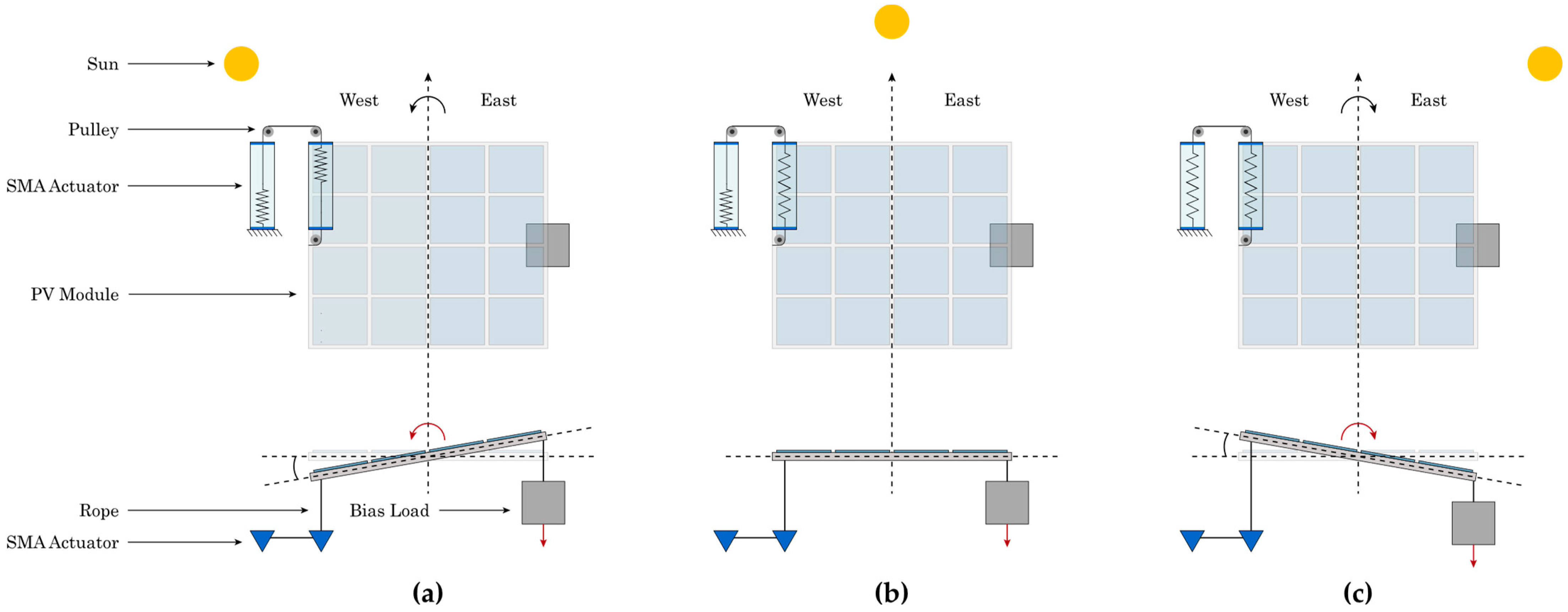
2.3. SMA Solar Self-Tracker Conceptual Design
2.4. Analytical Thermal Model
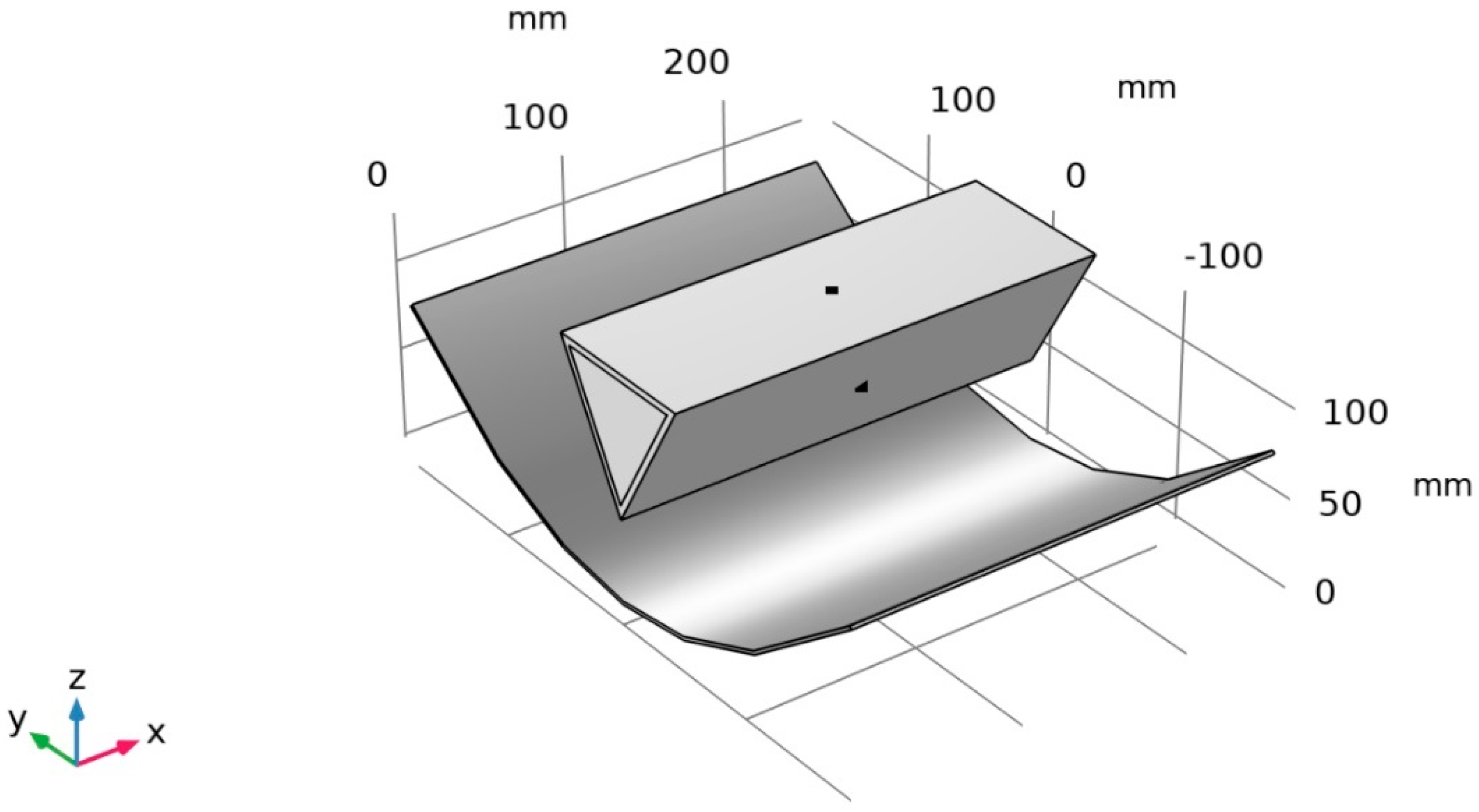
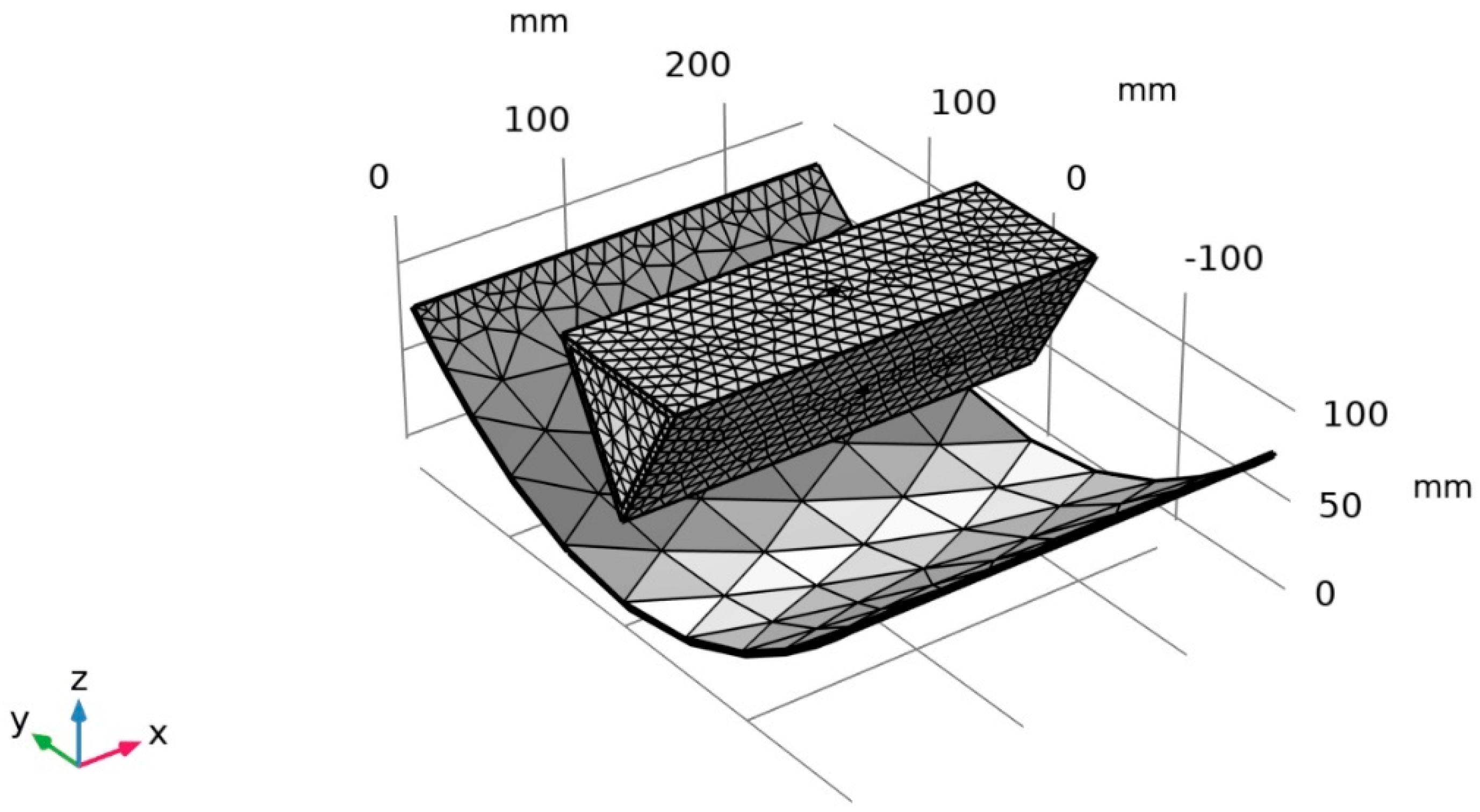
2.5. D Thermal Numerical Study Setup
3. Results
3.1. Effect of Introducing a PTC on the Thermomechanical Actuator’s Thermal Behavior
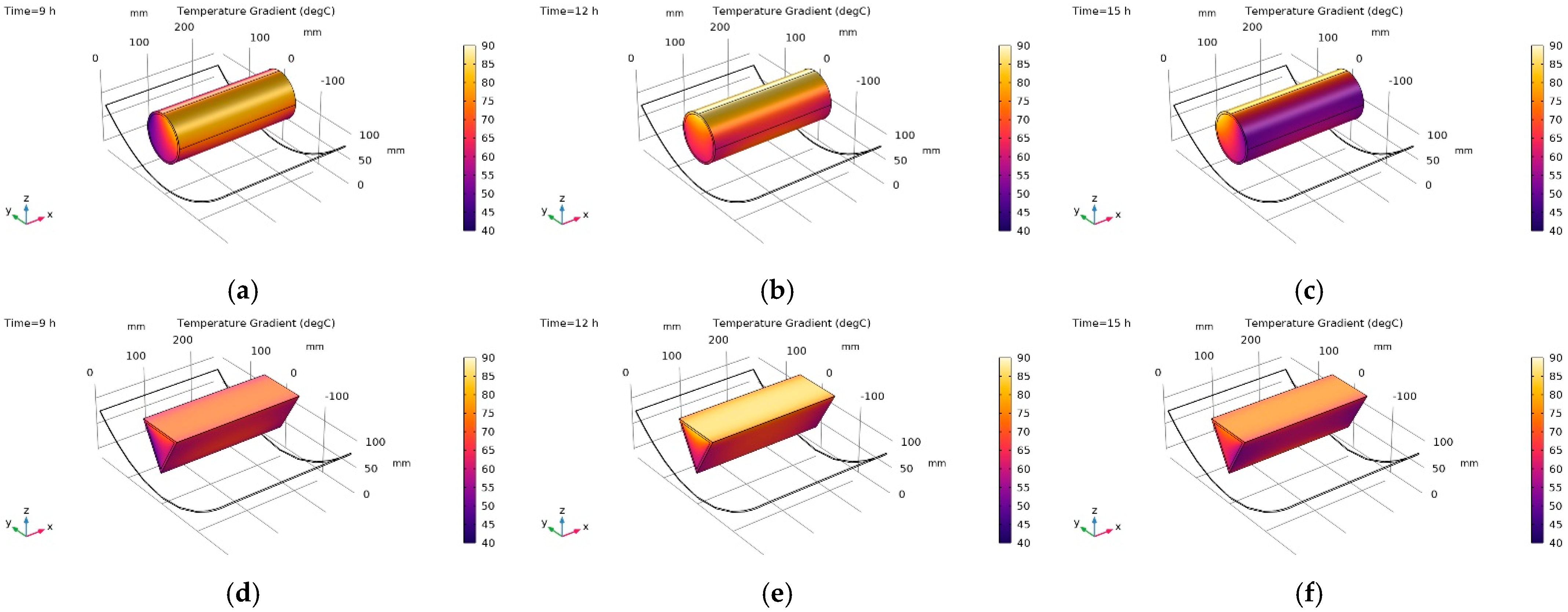
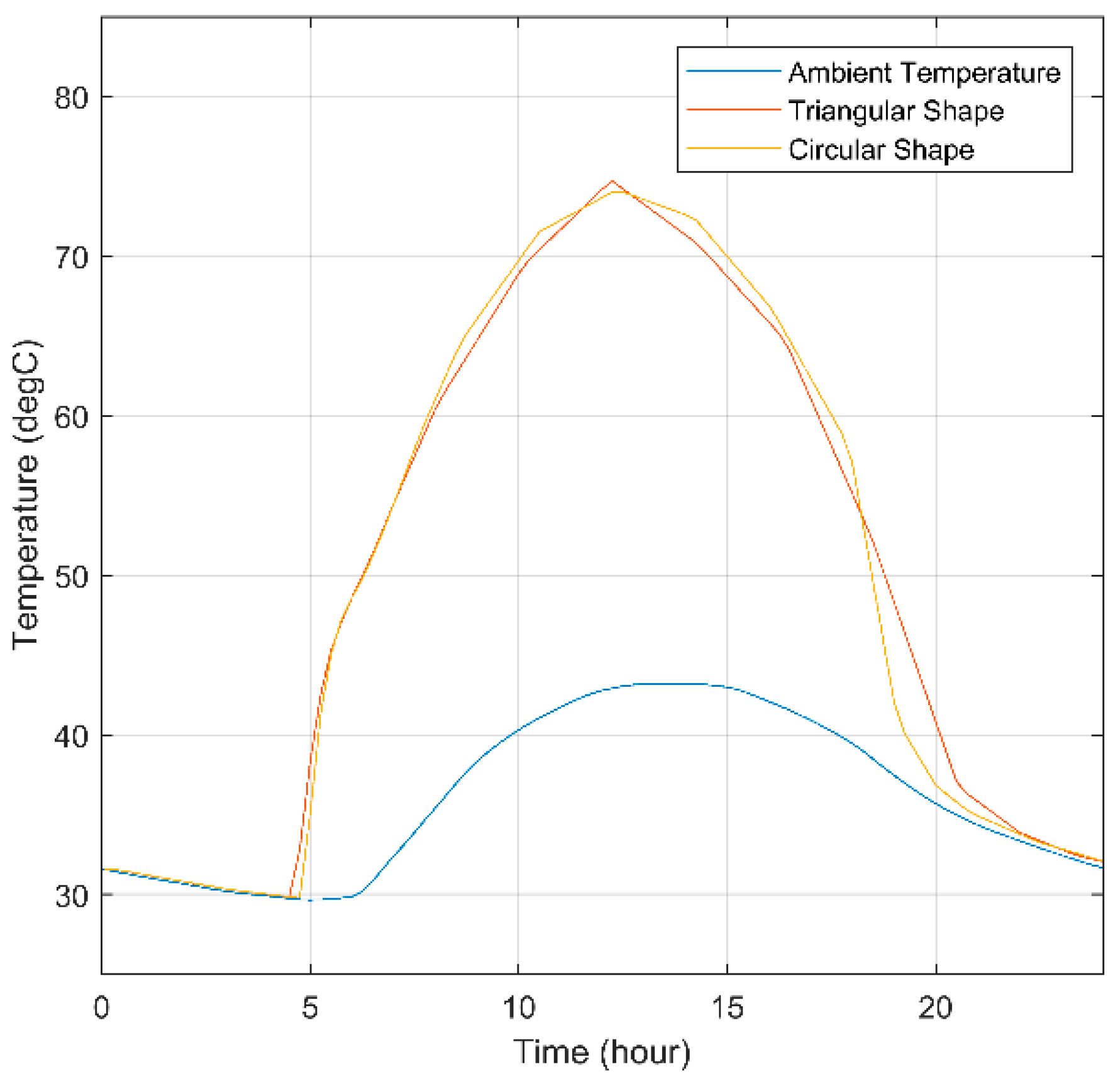
3.2. Thermal Behavior of a Triangular SHC in Comparison to a Circular SHC
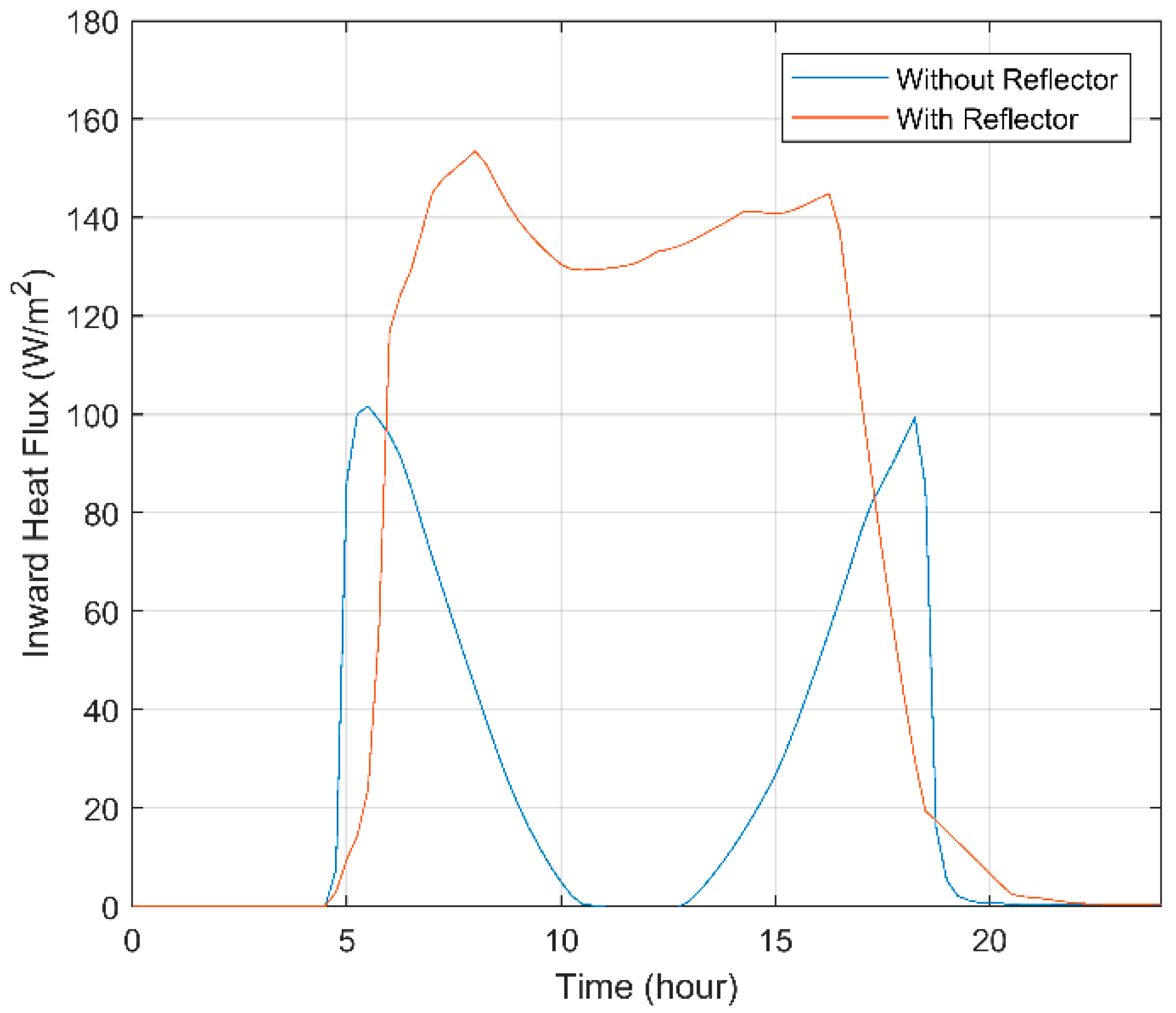
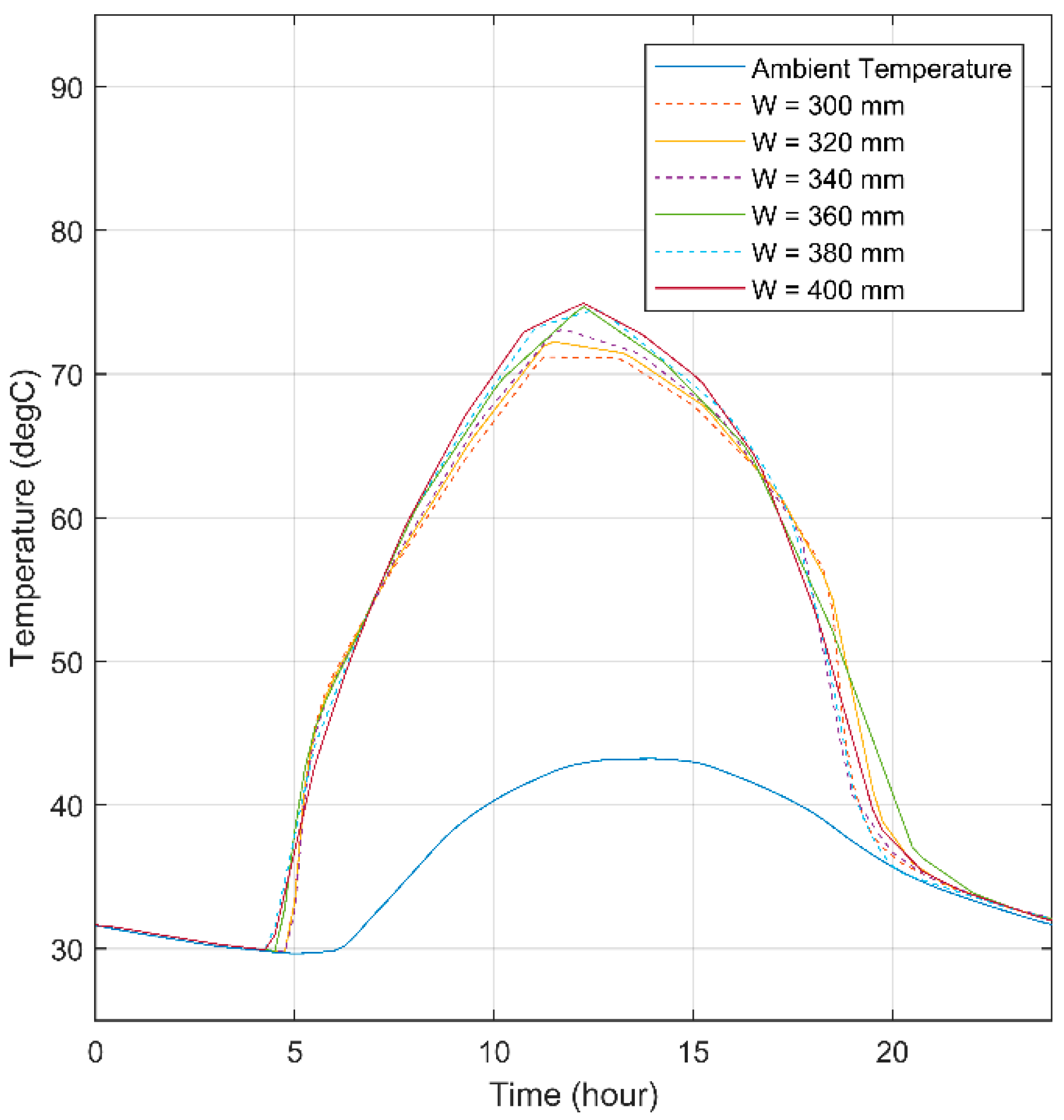
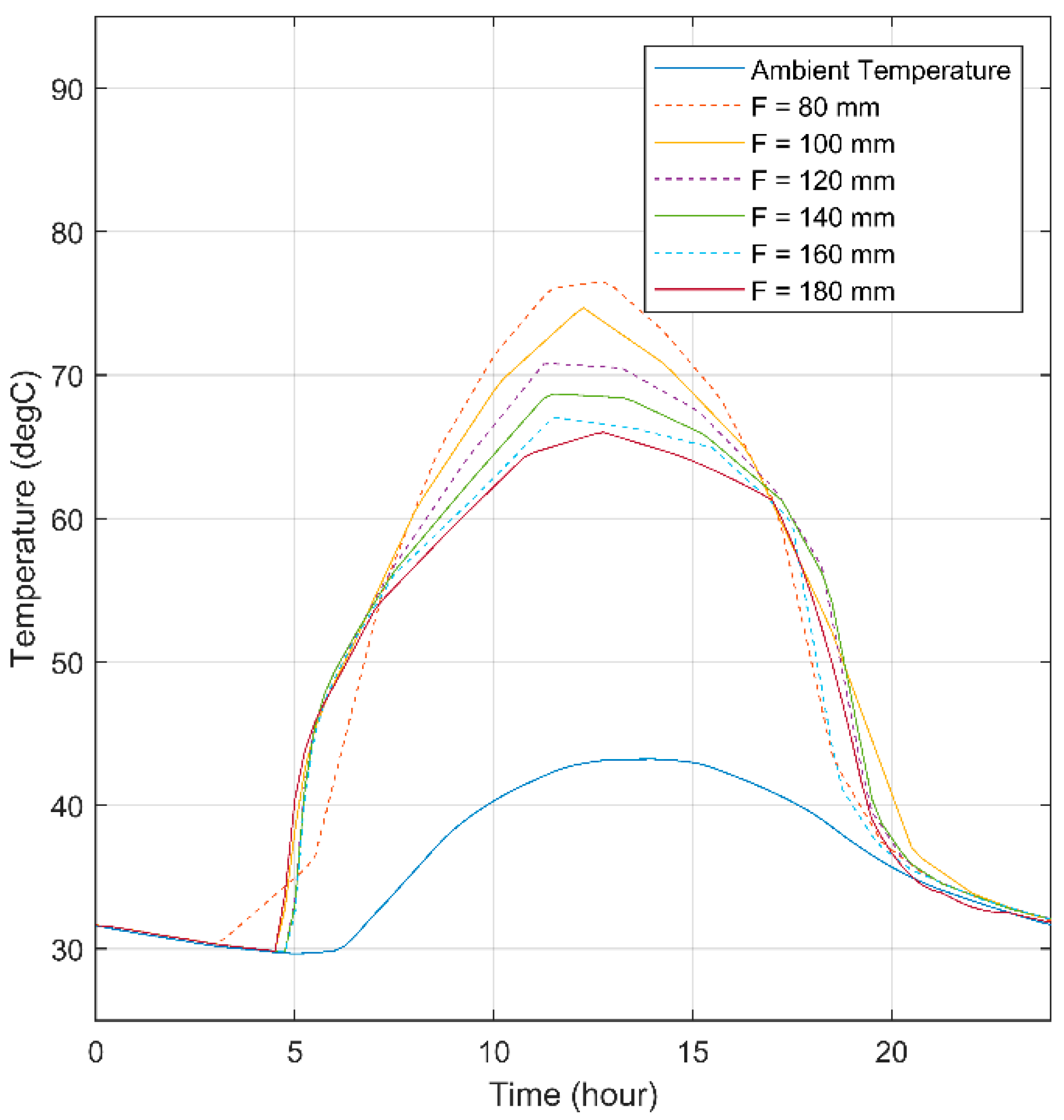
3.3. Optimization of the Geometrical Parameters of the Reflector
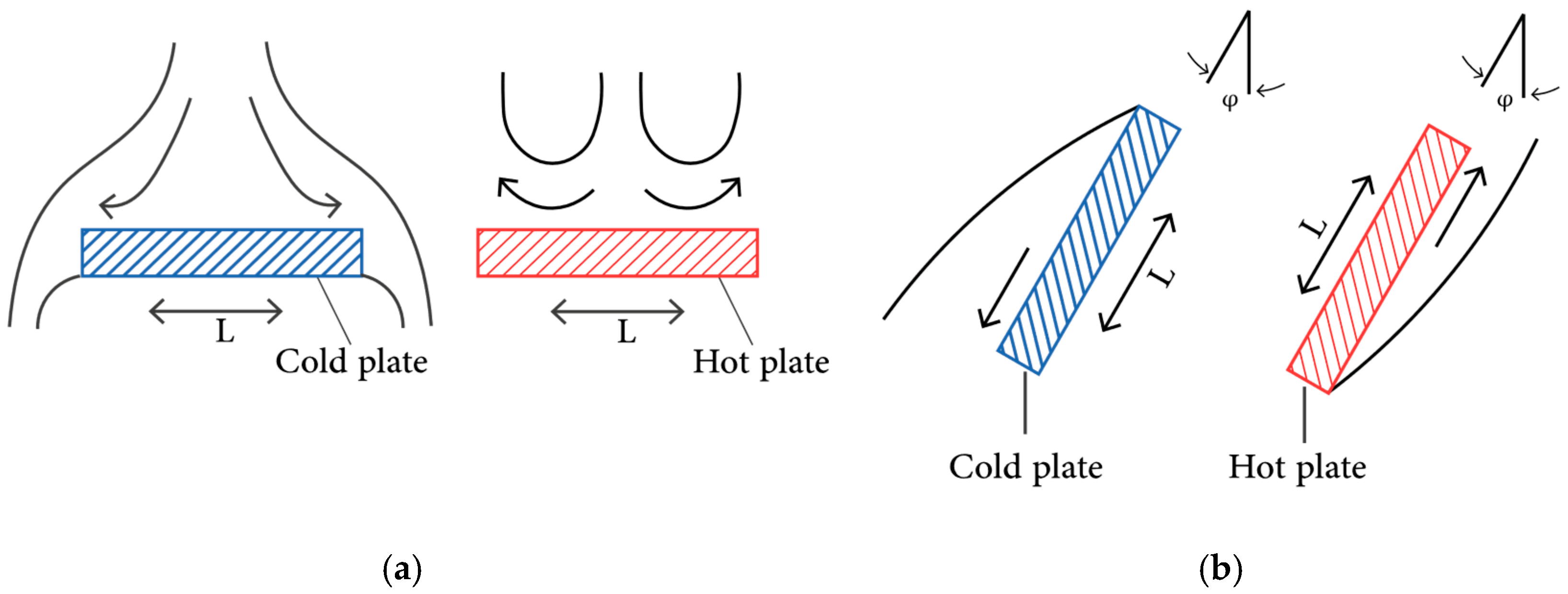
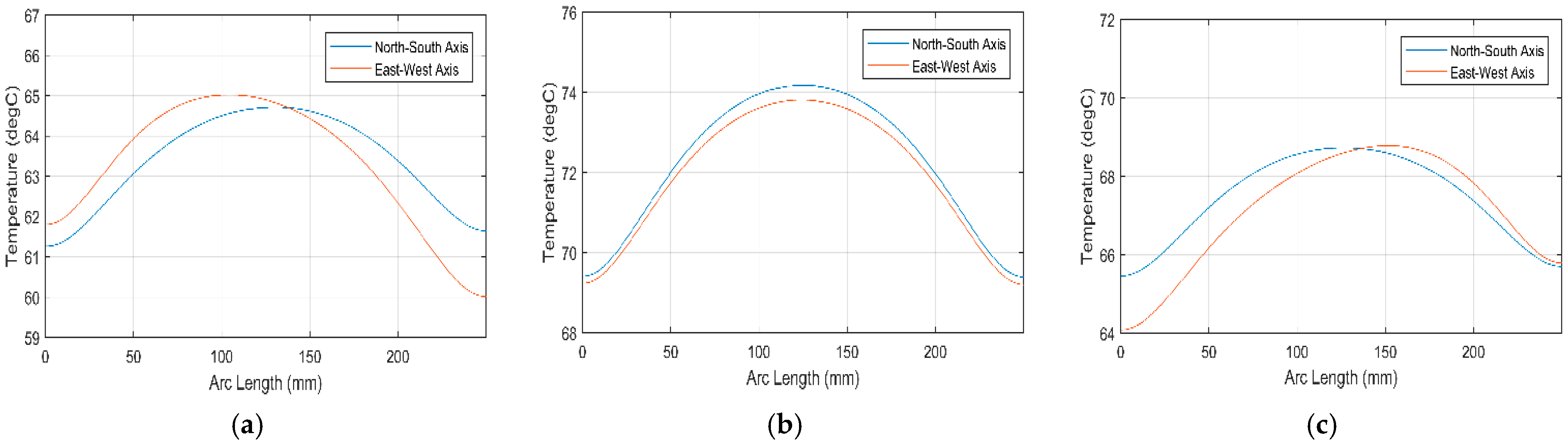
3.4. SHC Orientation’s Effect on the Thermal Behavior
3.5. One-Year Midpoint Temperature Variation in the Optimized SHC
4. Conclusions
- The performance of the SHC is best with the presence of a reflector with an aperture width between 300 and 400 mm and a focal length of 100 mm.
- The SHC is better oriented on the north–south axis since this orientation provides a well-distributed temperature profile inside the SHC.
- SMA springs with an activation temperature varying between 31.09 °C and 45.15 °C, in addition to being able to withstand a temperature of 75.00 °C without becoming plastically deformed or damaged, are applicable.
- The outcomes from the numerical simulation prove the feasibility of the design for the intended application.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PV | Photovoltaic |
| SMA | Shape memory alloy |
| SME | Shape memory effect |
| SHC | Solar heat collector |
| PTC | Parabolic trough collector |
| CSP | Concentrated solar power |
| KSA | Kingdom of Saudi Arabia |
| 3D | Three-dimensional |
| 1D | One-dimensional |
| CFD | Computational fluid dynamics |
| Symbols | |
| Amount of heat transferred [W/m2] | |
| Temperature [°C] | |
| Thermal resistance [°C/W] | |
| Length [m] | |
| Thermal conductivity [W/m × K] | |
| Heat transfer coefficient [W/m2 × K] | |
| Subscript | |
| cond | Conduction heat transfer process |
| conv | Convection heat transfer process |
| rad | Radiation heat transfer process |
| in | Input |
| out | Output |
| A | Acrylic |
| amb | Ambient |
References
- Osman, I.S.; Hariri, N.G. Thermal Investigation and Optimized Design of a Novel Solar Self-Driven Thermomechanical Actuator. Sustainability 2022, 14, 5078. [Google Scholar] [CrossRef]
- Kolosok, S.; Bilan, Y.; Vasylieva, T.; Wojciechowski, A.; Morawski, M. A Scoping Review of Renewable Energy, Sustainability and the Environment. Energies 2021, 14, 4490. [Google Scholar] [CrossRef]
- Alkholidi, A.G.; Hamam, H. Solar Energy Potentials in Southeastern European Countries: A Case Study. Int. J. Smart Grid 2019, 3, 108–119. [Google Scholar] [CrossRef]
- Al-Ahmed, A.; Inamuddin; Al-Sulaiman, F.A.; Khan, F. (Eds.) The Effects of Dust and Heat on Photovoltaic Modules: Impacts and Solutions; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]
- Riad, A.; Zohra, M.B.; Alhamany, A.; Mansouri, M. Bio-sun tracker engineering self-driven by thermo-mechanical actuator for photovoltaic solar systems. Case Stud. Therm. Eng. 2020, 21, 100709. [Google Scholar] [CrossRef]
- Lyulyov, O.; Pimonenko, T.; Kwilinski, A.; Dzwigol, H.; Dzwigol-Barosz, M.; Pavlyk, V.; Barosz, P. The Impact of the Government Policy on the Energy Efficient Gap: The Evidence from Ukraine. Energies 2021, 14, 373. [Google Scholar] [CrossRef]
- Eldin, S.A.S.; Abd-Elhady, M.S.; Kandil, H.A. Feasibility of solar tracking systems for PV panels in hot and cold regions. Renew. Energy 2016, 85, 228–233. [Google Scholar] [CrossRef]
- Teng, T.-P.; Nieh, H.-M.; Chen, J.-J.; Lu, Y.-C. Research and development of maximum power transfer tracking system for solar cell unit by matching impedance. Renew. Energy 2010, 35, 845–851. [Google Scholar] [CrossRef]
- Osman, I.S.; Almadani, I.K.; Hariri, N.G.; Maatallah, T.S. Experimental Investigation and Comparison of the Net Energy Yield Using Control-Based Solar Tracking Systems. Int. J. Photoenergy 2022, 2022, 7715214. [Google Scholar] [CrossRef]
- Hariri, N.G.; AlMutawa, M.A.; Osman, I.S.; AlMadani, I.K.; Almahdi, A.M.; Ali, S. Experimental Investigation of Azimuth- and Sensor-Based Control Strategies for a PV Solar Tracking Application. Appl. Sci. 2022, 12, 4758. [Google Scholar] [CrossRef]
- Bengisu, M.; Ferrara, M. Materials That Move; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Catoor, D.; Ma, Z.; Kumar, S. Cyclic response and fatigue failure of Nitinol under tension–tension loading. J. Mater. Res. 2019, 34, 3504–3522. [Google Scholar] [CrossRef]
- Sellitto, A.; Riccio, A. Overview and Future Advanced Engineering Applications for Morphing Surfaces by Shape Memory Alloy Materials. Materials 2019, 12, 708. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Costanza, G.; Tata, M.E.; Calisti, C. Nitinol one-way shape memory springs: Thermomechanical characterization and actuator design. Sens. Actuators Phys. 2010, 157, 113–117. [Google Scholar] [CrossRef]
- Costanza, G.; Paoloni, S.; Tata, M.E. IR Thermography and Resistivity Investigations on Ni-Ti Shape Memory Alloy. Key Eng. Mater. 2014, 605, 23–26. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2007, 221, 535–552. [Google Scholar] [CrossRef] [Green Version]
- Braun, D.; Weik, D.; Elsner, S.; Hunger, S.; Werner, M.; Drossel, W.-G. Position Control and Force Estimation Method for Surgical Forceps Using SMA Actuators and Sensors. Materials 2021, 14, 5111. [Google Scholar] [CrossRef]
- Wang, M.; Yu, H.; Shi, P.; Meng, Q. Design Method for Constant Force Components Based on Superelastic SMA. Materials 2019, 12, 2842. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, X.; Zhang, Y.; Lu, Y.; Yang, F.; Yue, H. A reusable SMA actuated non-explosive lock-release mechanism for space application. Int. J. Smart Nano Mater. 2020, 11, 65–77. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Xie, Z.; Wang, J.; Yue, H.; Wu, M.; Liu, Y. A novel design of a parallel gripper actuated by a large-stroke shape memory alloy actuator. Int. J. Mech. Sci. 2019, 159, 74–80. [Google Scholar] [CrossRef]
- Hu, K.; Rabenorosoa, K.; Ouisse, M. A Review of SMA-Based Actuators for Bidirectional Rotational Motion: Application to Origami Robots. Front. Robot. AI 2021, 8, 678486. [Google Scholar] [CrossRef]
- Suman, S.; Khan, M.K.; Pathak, M. Performance enhancement of solar collectors—A review. Renew. Sustain. Energy Rev. 2015, 49, 192–210. [Google Scholar] [CrossRef] [Green Version]
- Marcic, S.; Kovacic-Lukman, R.; Virtic, P. Hybrid system solar collectors—Heat pumps for domestic water heating. Therm. Sci. 2019, 23, 3675–3685. [Google Scholar] [CrossRef]
- Oztop, H.F.; Bayrak, F.; Hepbasli, A. Energetic and exergetic aspects of solar air heating (solar collector) systems. Renew. Sustain. Energy Rev. 2013, 21, 59–83. [Google Scholar] [CrossRef]
- Tian, Y.; Zhao, C.Y. A review of solar collectors and thermal energy storage in solar thermal applications. Appl. Energy 2013, 104, 538–553. [Google Scholar] [CrossRef] [Green Version]
- Lamrani, B.; Kuznik, F.; Draoui, A. Thermal performance of a coupled solar parabolic trough collector latent heat storage unit for solar water heating in large buildings. Renew. Energy 2020, 162, 411–426. [Google Scholar] [CrossRef]
- Ahmad, S.H.A.; Saidur, R.; Mahbubul, I.M.; Al-Sulaiman, F.A. Optical properties of various nanofluids used in solar collector: A review. Renew. Sustain. Energy Rev. 2017, 73, 1014–1030. [Google Scholar] [CrossRef]
- Chen, C.Q.; Diao, Y.H.; Zhao, Y.H.; Wang, Z.Y.; Liang, L.; Wang, T.Y.; Ma, C. Thermal performance of a closed collector–storage solar air heating system with latent thermal storage: An experimental study. Energy 2020, 202, 117764. [Google Scholar] [CrossRef]
- Wu, Z.; Li, S.; Yuan, G.; Lei, D.; Wang, Z. Three-dimensional numerical study of heat transfer characteristics of parabolic trough receiver. Appl. Energy 2014, 113, 902–911. [Google Scholar] [CrossRef]
- NOOR ENERGY 1. Acwapower. Available online: https://acwapower.com/en/projects/noor-energy-1/ (accessed on 5 March 2022).
- Maatallah, T.; Ammar, R. Design, modeling, and optimization of a dual reflector parabolic trough concentration system. Int. J. Energy Res. 2020, 44, 3711–3723. [Google Scholar] [CrossRef]
- Aldali, Y.; Muneer, T.; Henderson, D. Solar absorber tube analysis: Thermal simulation using CFD. Int. J. Low-Carbon Technol. 2013, 8, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Hariri, N.G.; Almadani, I.K.; Osman, I.S. A State-of-the-Art Self-Cleaning System Using Thermomechanical Effect in Shape Memory Alloy for Smart Photovoltaic Applications. Materials 2022, 15, 5704. [Google Scholar] [CrossRef] [PubMed]
- Almadani, I.K.; Osman, I.S.; Hariri, N.G. In-Depth Assessment and Optimized Actuation Method of a Novel Solar-Driven Thermomechanical Actuator via Shape Memory Alloy. Energies 2022, 15, 3807. [Google Scholar] [CrossRef]
- Gong, J.; Huang, J.; Hu, X.; Wang, J.; Lund, P.D.; Gao, C. Optimizing research on large-aperture parabolic trough condenser using two kinds of absorber tubes with reflector at 500 °C. Renew. Energy 2021, 179, 2187–2197. [Google Scholar] [CrossRef]
- Widyolar, B.; Jiang, L.; Ferry, J.; Winston, R.; Cygan, D.; Abbasi, H. Experimental performance of a two-stage (50×) parabolic trough collector tested to 650 °C using a suspended particulate heat transfer fluid. Appl. Energy 2019, 240, 436–445. [Google Scholar] [CrossRef]
- Gong, J.; Wang, J.; Lund, P.D.; Zhao, D.; Xu, J.; Jin, Y. Comparative study of heat transfer enhancement using different fins in semi-circular absorber tube for large-aperture trough solar concentrator. Renew. Energy 2021, 169, 1229–1241. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value | Unit |
|---|---|---|
| Heat capacity at constant pressure | 1470 | |
| Density | 1190 | |
| Thermal conductivity | 0.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hariri, N.G.; Nayel, K.M.; Alyoubi, E.K.; Almadani, I.K.; Osman, I.S.; Al-Qahtani, B.A. Thermal–Optical Evaluation of an Optimized Trough Solar Concentrator for an Advanced Solar-Tracking Application Using Shape Memory Alloy. Materials 2022, 15, 7110. https://doi.org/10.3390/ma15207110
Hariri NG, Nayel KM, Alyoubi EK, Almadani IK, Osman IS, Al-Qahtani BA. Thermal–Optical Evaluation of an Optimized Trough Solar Concentrator for an Advanced Solar-Tracking Application Using Shape Memory Alloy. Materials. 2022; 15(20):7110. https://doi.org/10.3390/ma15207110
Chicago/Turabian StyleHariri, Nasir Ghazi, Kamal Mohamed Nayel, Emad Khalid Alyoubi, Ibrahim Khalil Almadani, Ibrahim Sufian Osman, and Badr Ahmed Al-Qahtani. 2022. "Thermal–Optical Evaluation of an Optimized Trough Solar Concentrator for an Advanced Solar-Tracking Application Using Shape Memory Alloy" Materials 15, no. 20: 7110. https://doi.org/10.3390/ma15207110
APA StyleHariri, N. G., Nayel, K. M., Alyoubi, E. K., Almadani, I. K., Osman, I. S., & Al-Qahtani, B. A. (2022). Thermal–Optical Evaluation of an Optimized Trough Solar Concentrator for an Advanced Solar-Tracking Application Using Shape Memory Alloy. Materials, 15(20), 7110. https://doi.org/10.3390/ma15207110