
An Adaptive Algorithm and Additively Manufactured Punch Used to Form Aluminum Sheet Metal Parts

 ,
,  ,
, 

Abstract
:1. Introduction
- the physical and mechanical properties of the material;
- the shape of the part and the thickness of the sheet metal;
- the bending radius, working scheme, and bending process used.
- it allows the fabrication of parts with complex structures that cannot be achieved by other methods/means and offers the possibility of improving the performance and functionality of the products, adapting the products to the individual needs of consumers;
- it allows the customization of any object made, covering, at the level of the production method, both the production of series and personalized objects, thus addressing the two major markets;
- it allows savings of material, energy, and human resources.
2. Methodology
2.1. General Methodology
- The primary purpose of optimization leads to the optimization algorithm’s mathematical formulation. In this case, the best rigidity-to-weight ratio was chosen, where the algorithm tries to minimize the overall conformity of the model, which is a measure of the rigidity’s overall (mutual) flexibility. The sum of the deformation energies of all elements defines the conformity.
- Limiting constraints for solutions in the design space. In this case, the percentage of the mass to be eliminated was chosen (max. 30%).
- Preserved areas excluded from the optimization process and retained in their final form. Geometric features in which loads and fasteners are applied are preserved by default. In this case, all the fixing holes of the punch on the dynamometer and the contact surface with the metal sheets were preserved.
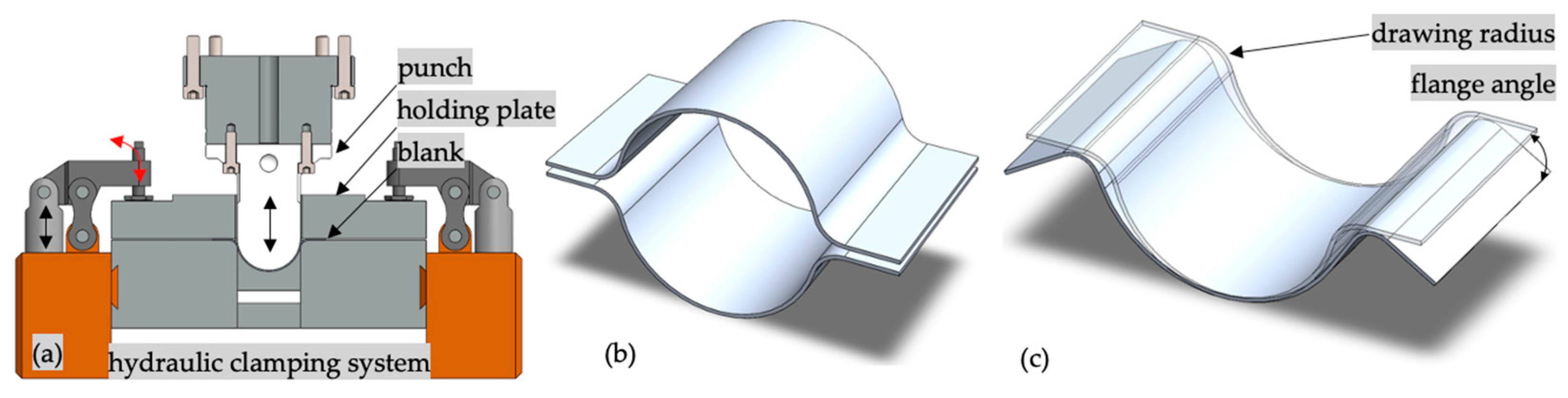
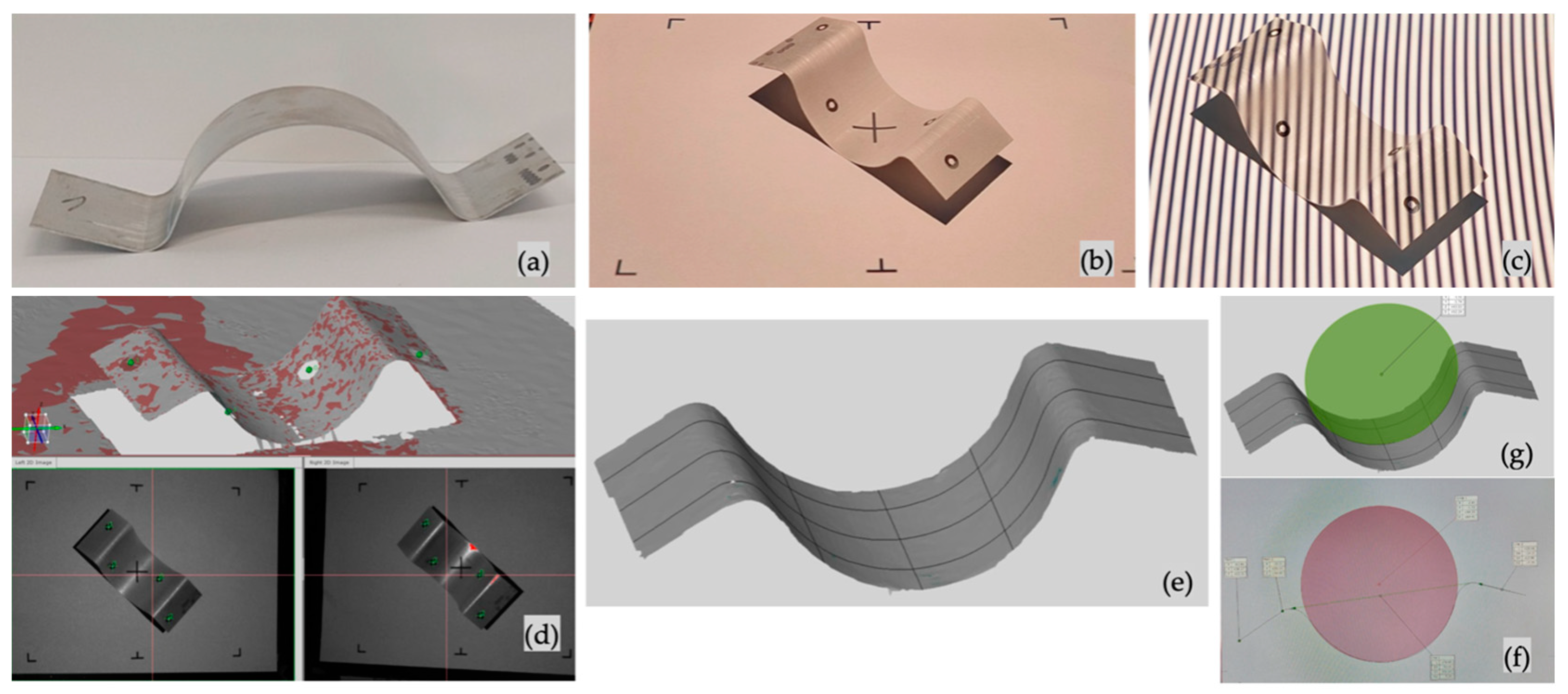
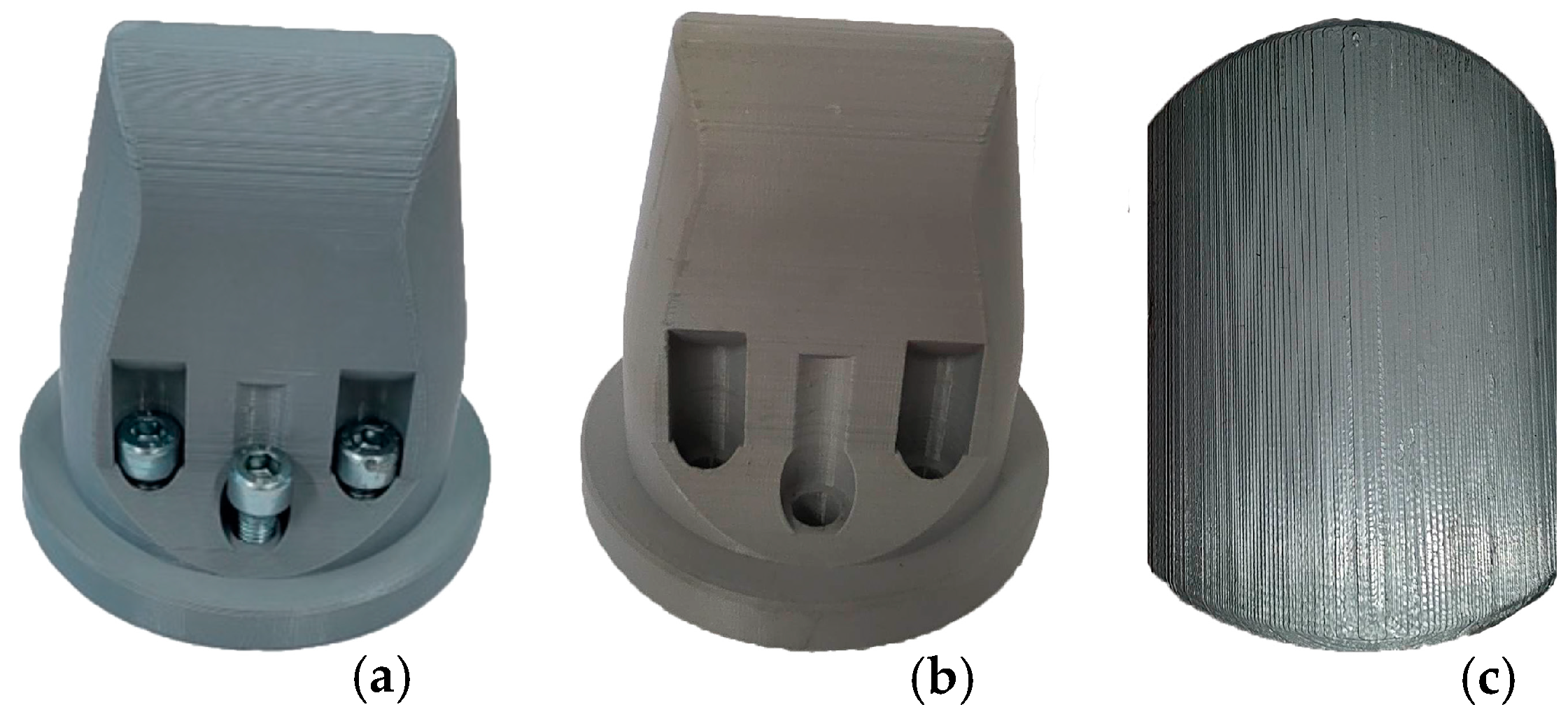
- The geometrical constraints imposed by manufacturing processes ensure that the optimized part is manufacturable. These constraints, such as the ejecting direction, thickness control, or symmetry control, are not required in this case, the part being constructed by additive manufacturing, as seen in Figure 3c.
2.2. Software Solution and Experimental Plan
2.3. Measurement Methodology
3. Results
- F-value (calculates the variance between means that differ significantly, indicating that the results did not occur by chance);
- p-value (correlated to the F-value; a value lower than 0.05 indicates the statistical significance of the observed results);
- R-squared (R2; values higher than 0.9 indicate high confidence in the model’s capacity to predict a valid response) and its variations:
- ○
- Adjusted R2 (Adj-R2)—the amount of variation about the mean indicated by the model;
- ○
- Predicted R2—measures how the model predicts a response.
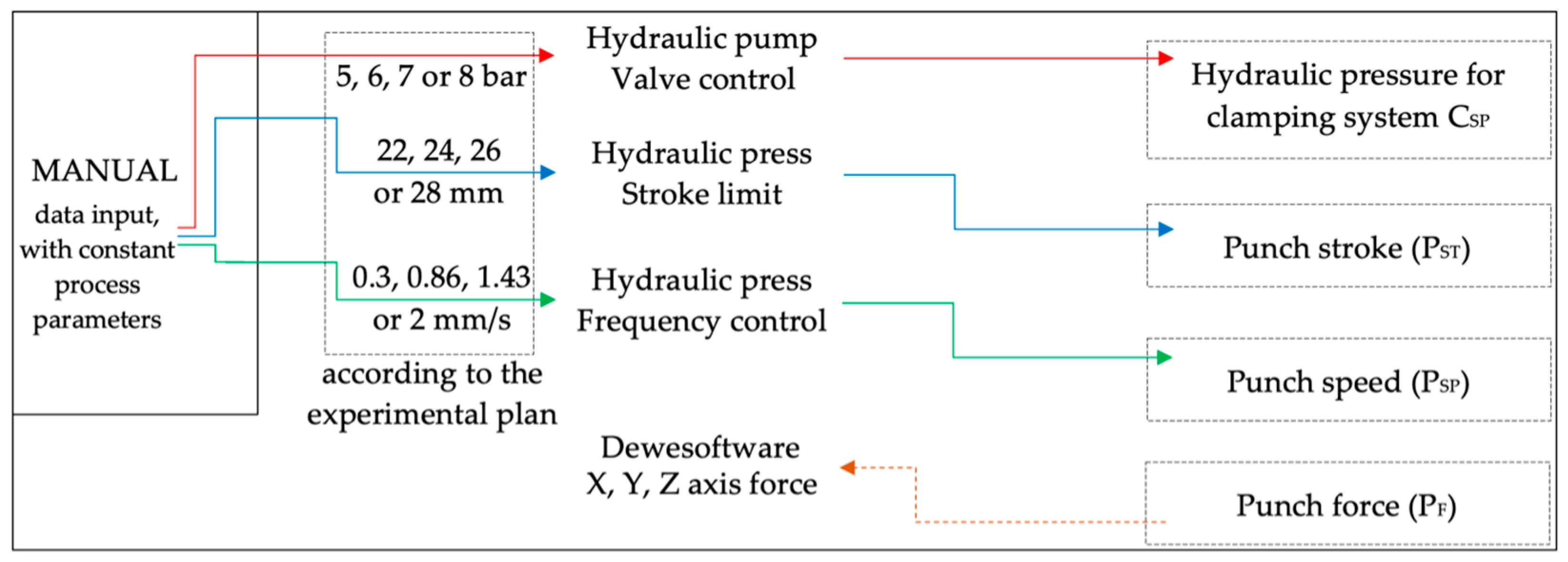
3.1. Pre-Programed Controlled Process Results
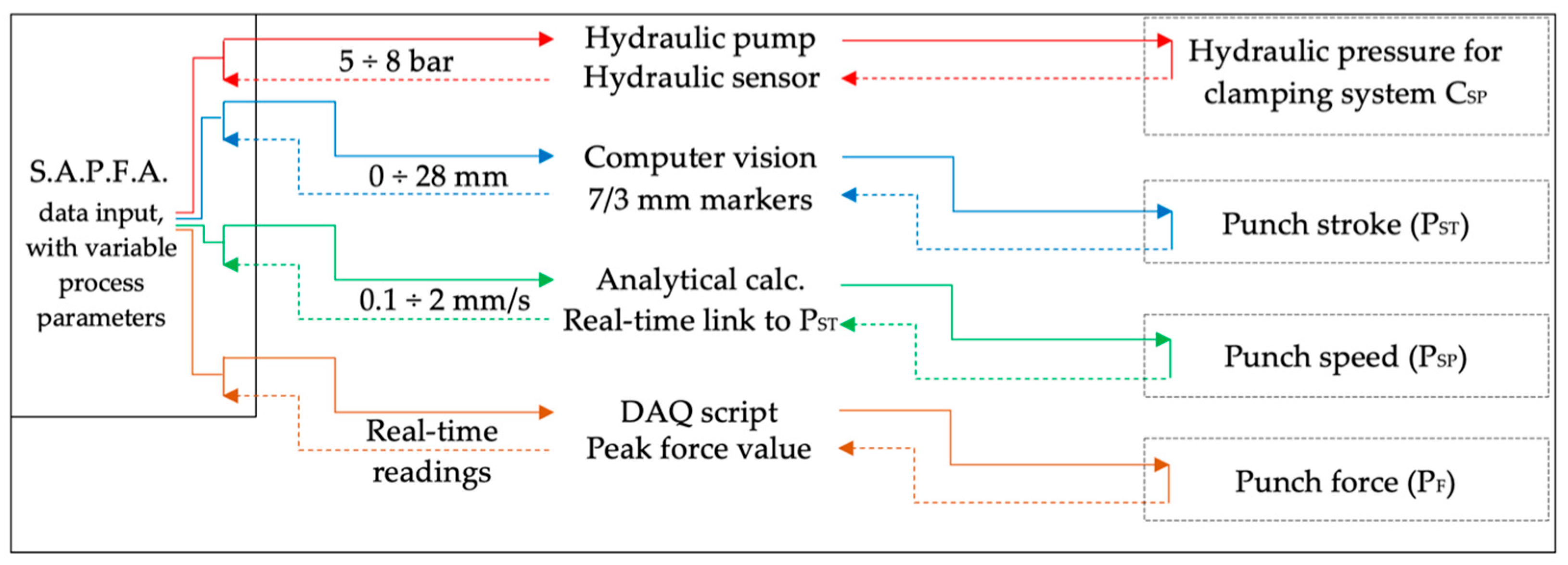
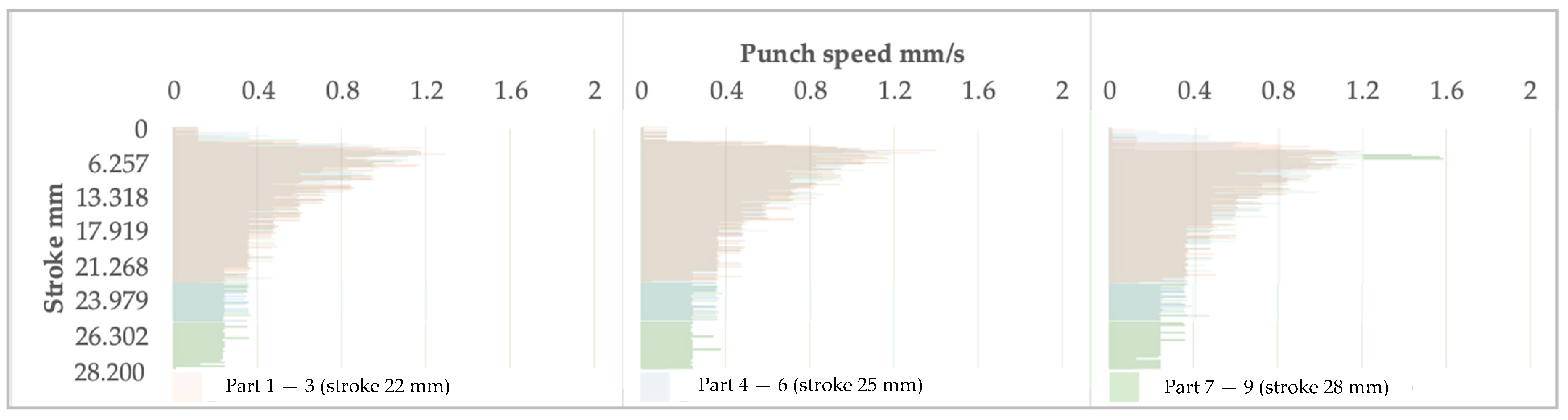
3.2. Adaptive Punch-Forming Algorithm-Controlled Process Results
4. Discussion
5. Conclusions
- -
- the reaction force of the system, depending on the forming speed, pressure, and stroke, increases rapidly after exceeding a depth of 25 mm;
- -
- the radius of the part is strongly influenced by the clamping force, having inconsistent values at lower values;
- -
- high values of the forming speed produce similar effects regarding the radius.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hetz, P.; Suttner, S.; Merklein, M. Investigation of the Springback Behaviour of High-strength Aluminium Alloys Based on Cross Profile Deep Drawing Tests. Procedia Manuf. 2020, 47, 1223–1229. [Google Scholar] [CrossRef]
- Kim, H.-K.; Kim, W.-J. A Springback Prediction Model for Warm Forming of Aluminum Alloy Sheets Using Tangential Stresses on a Cross-Section of Sheet. Metals 2018, 8, 257. [Google Scholar] [CrossRef]
- Sun, L.; Cai, Z.; He, D.; Li, L. Aluminum Alloy Sheet-Forming Limit Curve Prediction Based on Original Measured Stress–Strain Data and Its Application in Stretch-Forming Process. Metals 2019, 9, 1129. [Google Scholar] [CrossRef]
- Teng, F.; Liang, J.; Wang, S.; Han, Q. Effect of Axial Normal Stress and Bending Moment between Contact and Non-Contact Zone on Forming Accuracy for Flexible Stretch Bending Formation. Metals 2022, 12, 1168. [Google Scholar] [CrossRef]
- Patil, S.P.; Fenard, Y.; Bailkeri, S.; Heufer, K.A.; Markert, B. Investigation of Sheet Metal Forming Using a Rapid Compression Machine. Materials 2019, 12, 3957. [Google Scholar] [CrossRef]
- Cinar, Z.; Asmael, M.; Zeeshan, Q.; Safaei, B. Effect of Springback on A6061 Sheet Metal Bending: A Review. J. Kejuruter. 2021, 33, 13–26. [Google Scholar] [CrossRef] [PubMed]
- Lawanwomg, K.; Hamasaki, H.; Hino, R.; Yoshida, F. A Novel Technology to Eliminate U-bending Springback of High Strength Steel Sheet by Using Additional Bending with Counter Punch. Procedia Eng. 2014, 81, 957–962. [Google Scholar] [CrossRef]
- Choudhury, I.A.; Ghomi, V. Springback reduction of aluminum sheet in V-bending dies. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2014, 228, 917–926. [Google Scholar] [CrossRef]
- Milošević, N.Z.; Sedmak, A.S.; Bakić, G.M.; Lazić, V.; Milošević, M.; Mladenović, G.; Maslarević, A. Determination of the Actual Stress-Strain Diagram for Undermatching Welded Joint Using DIC and FEM. Materials 2021, 14, 4691. [Google Scholar] [CrossRef]
- Aakash, B.S.; Connors, J.; Shields, M.D. Stress-strain data for aluminum 6061-T651 from 9 lots at 6 temperatures under uniaxial and plane strain tension. Data Brief 2019, 25, 104085. [Google Scholar] [CrossRef]
- Mehdi, D. Effect of Silicon content on the Mechanical Properties of Aluminum Alloy. Int. Res. J. Eng. Technol. 2015, 2, 1326–1330. [Google Scholar]
- Borodulina, S.; Kulachenko, A.; Nygårds, M.; Galland, S. Stress-strain curve of paper revisited. Nord. Pulp Pap. Res. J. 2012, 27, 318–328. [Google Scholar] [CrossRef]
- Chen, Y.; Clausen, A.; Hopperstad, O.; Langseth, M. Stress–strain behaviour of aluminium alloys at a wide range of strain rates. Int. J. Solids Struct. 2009, 46, 3825–3835. [Google Scholar] [CrossRef]
- Grigoras, C.C.; Zichil, V.; Chirita, B.; Ciubotariu, V.A. Adaptive Stretch-Forming Process: A Computer Vision and Statistical Analysis Approach. Machines 2021, 9, 357. [Google Scholar] [CrossRef]
- Cuan-Urquizo, E.; Barocio, E.; Tejada-Ortigoza, V.; Pipes, R.B.; Rodriguez, C.A.; Roman-Flores, A. Characterization of the Mechanical Properties of FFF Structures and Materials: A Review on the Experimental, Computational and Theoretical Approaches. Materials 2019, 12, 895. [Google Scholar] [CrossRef]
- Spathopoulos, S.C.; Stavroulakis, G.E. Springback Prediction in Sheet Metal Forming, Based on Finite Element Analysis and Artificial Neural Network Approach. Appl. Mech. 2020, 1, 97–110. [Google Scholar] [CrossRef]
- Lal, R.K.; Choubey, V.K.; Dwivedi, J.; Kumar, S. Study of factors affecting Springback in Sheet Metal Forming and Deep Drawing Process. Mater. Today Proc. 2018, 5 Pt 1, 4353–4358. [Google Scholar] [CrossRef]
- Chongthairungruang, B.; Uthaisangsuk, V.; Suranuntchai, S.; Jirathearanat, S. Springback prediction in sheet metal forming of high strength steels. Mater. Des. 2013, 50, 253–266. [Google Scholar] [CrossRef]
- Grigoras, C.; Chirita, B.; Brabie, G.; Ciofu, C. Experimental analysis of AZ31B magnesium alloy sheet failure using punch stretching. IOP Conf. Ser. Mater. Sci. Eng. 2019, 682, 012009. [Google Scholar] [CrossRef]
- Grigoraș, C.; Chiri, B.; Brabie, G. Additive manufacturing of a stretch forming die using 3D printing technology. IOP Conf. Ser. Mater. Sci. Eng. 2019, 564, 012017. [Google Scholar] [CrossRef]
- Brancewicz-Steinmetz, E.; Sawicki, J. Bonding and Strengthening the PLA Biopolymer in Multi-Material Additive Manufacturing. Materials 2022, 15, 5563. [Google Scholar] [CrossRef] [PubMed]
- Walia, K.; Khan, A.; Breedon, P. Polymer-Based Additive Manufacturing: Process Optimisation for Low-Cost Industrial Robotics Manufacture. Polymers 2021, 13, 2809. [Google Scholar] [CrossRef] [PubMed]
- Fico, D.; Rizzo, D.; Casciaro, R.; Corcione, C.E. A Review of Polymer-Based Materials for Fused Filament Fabrication (FFF): Focus on Sustainability and Recycled Materials. Polymers 2022, 14, 465. [Google Scholar] [CrossRef]
- Guessasma, S.; Belhabib, S.; Bassir, D.; Nouri, H.; Gomes, S. On the Mechanical Behaviour of Biosourced Cellular Polymer Manufactured Using Fused Deposition Modelling. Polymers 2020, 12, 2651. [Google Scholar] [CrossRef]
- Introduction to Additive Manufacturing: Part Three. Available online: https://www.totalmateria.com/page.aspx?ID=CheckArticle&site=ktn&NM=439 (accessed on 25 March 2023).
- Ciubotariu, V.A.; Radu, M.C.; Herghelegiu, E.; Zichil, V.; Grigoras, C.C.; Nechita, E. Structural and Behaviour Optimization of Tubular Structures Made of Tailor Welded Blanks by Applying Taguchi and Genetic Algorithms Methods. Appl. Sci. 2022, 12, 6794. [Google Scholar] [CrossRef]
- Bradski, G. The opencv library. Dr. Dobbs J. Softw. Tools 2000, 3, 122–125. [Google Scholar]
- Interpretation of R-Squared, Experimenters Frequently Ask the Question “What is a Good R-Squared Value? How Low Can It Be before the Results Are Not Valid?”. Available online: https://www.statease.com/docs/v22.0/contents/analysis/interpretation-of-r-squared/ (accessed on 25 March 2023).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chemical Composition wt.% | |||||||||
| Al | Si | Fe | Cu | Mn | Mg | Cr | Zn | Ti | Other |
| 97.4 | 0.66 | 0.4 | 0.22 | 0.15 | 0.9 | 0.16 | 0.07 | 0.03 | 0.01 |
| Rp0.2 N/mm2 | Rm N/mm2 | A % | |||||||
| 156 | 267 | 21 | |||||||
| Rm N/mm2 | EPLA N/mm2 | A % | K kJ/m2 (Unnotched) |
|---|---|---|---|
| 48 | 267 | 21.9 | 20.4 |
| Layer Height mm | Initial Layer Height mm | Line Width mm | Wall Thickness mm | Top Thickness mm |
| 0.15 | 0.2 | 0.375 | 1 | 1 |
| Bottom thickness mm | Horizontal expansion mm | Infill density % | Infill pattern | Infill overlap % |
| 1 | −0.015 | 50 | triangles | 15 |
| Flow % | Build plate temperature °C | Print speed mm/s | Wall print speed mm/s | |
| 102 | 60 | 75 | 37.5 | |
| Printing time | Part weight g | |||
| 8 h:59 m | 164 | |||
| Part Number | Pressure Bar | Velocity mm/s | Stroke mm | Max. Punch Force N | Drawing Radius mm | Flange Angle ° | Process Time s |
|---|---|---|---|---|---|---|---|
| 1 | 8 | 0.866 | 24 | 21,839 | 30.96 | 24.46 | 27.7 |
| 2 | 6 | 0.866 | 28 | 19,878 | 34.08 | 34.66 | 32.3 |
| 3 | 8 | 0.866 | 24 | 19,245 | 31.06 | 20.265 | 27.7 |
| 4 | 5 | 0.3 | 26 | 13,646 | 34.3 | 31.885 | 86.6 |
| 5 | 5 | 2.0 | 28 | 18,689 | 33.38 | 21.2 | 14.0 |
| 6 | 6 | 0.866 | 22 | 13,984 | 33.4 | 23.13 | 25.4 |
| 7 | 8 | 0.3 | 28 | 20,116 | 33.02 | 33.655 | 93.3 |
| 8 | 7 | 1.433 | 22 | 20,316 | 31.85 | 23.19 | 15.3 |
| 9 | 6 | 2.0 | 24 | 20,117 | 31.08 | 22.635 | 12.0 |
| 10 | 5 | 1.433 | 22 | 14,501 | 31.85 | 19.265 | 15.3 |
| 11 | 8 | 2.0 | 28 | 21,741 | 31.25 | 28.86 | 14.0 |
| 12 | 6 | 2.0 | 24 | 21,466 | 31.36 | 23.785 | 12.0 |
| 13 | 7 | 1.433 | 26 | 19,584 | 34.04 | 31.29 | 18.1 |
| 14 | 6 | 0.866 | 28 | 19,663 | 33.68 | 28.86 | 32.3 |
| 15 | 6 | 0.3 | 24 | 13,708 | 32.51 | 27.625 | 80.0 |
| 16 | 7 | 0.3 | 26 | 14,972 | 33.7 | 31.26 | 86.6 |
| 17 | 8 | 2.0 | 22 | 20,250 | 32 | 23.195 | 11.0 |
| 18 | 7 | 1.433 | 26 | 19,096 | 32.8 | 28.59 | 18.1 |
| 19 | 7 | 0.3 | 22 | 11,811 | 31.97 | 23.295 | 73.3 |
| 20 | 7 | 1.433 | 26 | 20,951 | 31.9 | 28.645 | 18.1 |
| Factor | Maximum Punch Force | Drawing Radius | Flange Angle |
|---|---|---|---|
| Model | p-value (significant if less than 0.05) | ||
| 3.35 × 10−5 (significant) | 0.004564 (significant) | 2.93 × 10−5 (significant) | |
| Pressure (A) | 0.000547 | 0.002147 | 0.223187 |
| Velocity (B) | 8.81 × 10−6 | 0.00637 | 0.002118 |
| Stroke (C) | 0.000573 | 0.039428 | 3.81 × 10−6 |
| R-squared | |||
| 0.902 | 0.879 | 0.878 | |
| Adj-R2 | |||
| 0.846 | 0.746 | 0.821 | |
| Predicted R2 | |||
| 0.708 | 0.561 | 0.721 | |
| Adeq. precision | |||
| 11.869 | 7.341 | 12.852 | |
| Part Number | Avg. Pressure Bar | Avg. Velocity mm/s | Stroke mm | Max. Punch Force N | Drawing Radius mm | Flange Angle ° | Process Time s |
|---|---|---|---|---|---|---|---|
| 1 | 7.45 | 0.261 | 22.199 | 6431 | 31.97 | 18.66 | 85.0 |
| 2 | 7.46 | 0.263 | 22.194 | 8591 | 32.29 | 27.93 | 84.4 |
| 3 | 7.67 | 0.275 | 22.247 | 18,109 | 32.43 | 23.37 | 81.0 |
| 4 | 7.12 | 0.257 | 25.168 | 7250 | 32.81 | 18.77 | 97.8 |
| 5 | 7.20 | 0.241 | 25.186 | 14,196 | 32.20 | 19.05 | 104.6 |
| 6 | 7.14 | 0.221 | 25.193 | 8265 | 31.57 | 22.52 | 114.1 |
| 7 | 7.05 | 0.204 | 28.130 | 13,483 | 31.60 | 19.81 | 138.2 |
| 8 | 8.85 | 0.210 | 28.200 | 21,184 | 31.14 | 24.43 | 134.6 |
| 9 | 7.08 | 0.217 | 28.054 | 7471 | 31.40 | 13.09 | 129.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciubotariu, V.A.; Grigoras, C.C.; Zichil, V.; Rosu, A.-M. An Adaptive Algorithm and Additively Manufactured Punch Used to Form Aluminum Sheet Metal Parts. Materials 2023, 16, 3704. https://doi.org/10.3390/ma16103704
Ciubotariu VA, Grigoras CC, Zichil V, Rosu A-M. An Adaptive Algorithm and Additively Manufactured Punch Used to Form Aluminum Sheet Metal Parts. Materials. 2023; 16(10):3704. https://doi.org/10.3390/ma16103704
Chicago/Turabian StyleCiubotariu, Vlad Andrei, Cosmin Constantin Grigoras, Valentin Zichil, and Ana-Maria Rosu. 2023. "An Adaptive Algorithm and Additively Manufactured Punch Used to Form Aluminum Sheet Metal Parts" Materials 16, no. 10: 3704. https://doi.org/10.3390/ma16103704
APA StyleCiubotariu, V. A., Grigoras, C. C., Zichil, V., & Rosu, A. -M. (2023). An Adaptive Algorithm and Additively Manufactured Punch Used to Form Aluminum Sheet Metal Parts. Materials, 16(10), 3704. https://doi.org/10.3390/ma16103704