
Structural Design and Controllability of Magnetorheological Grease Buffers under Impact Loading

Abstract
:1. Introduction
2. Magnetic Circuit Design
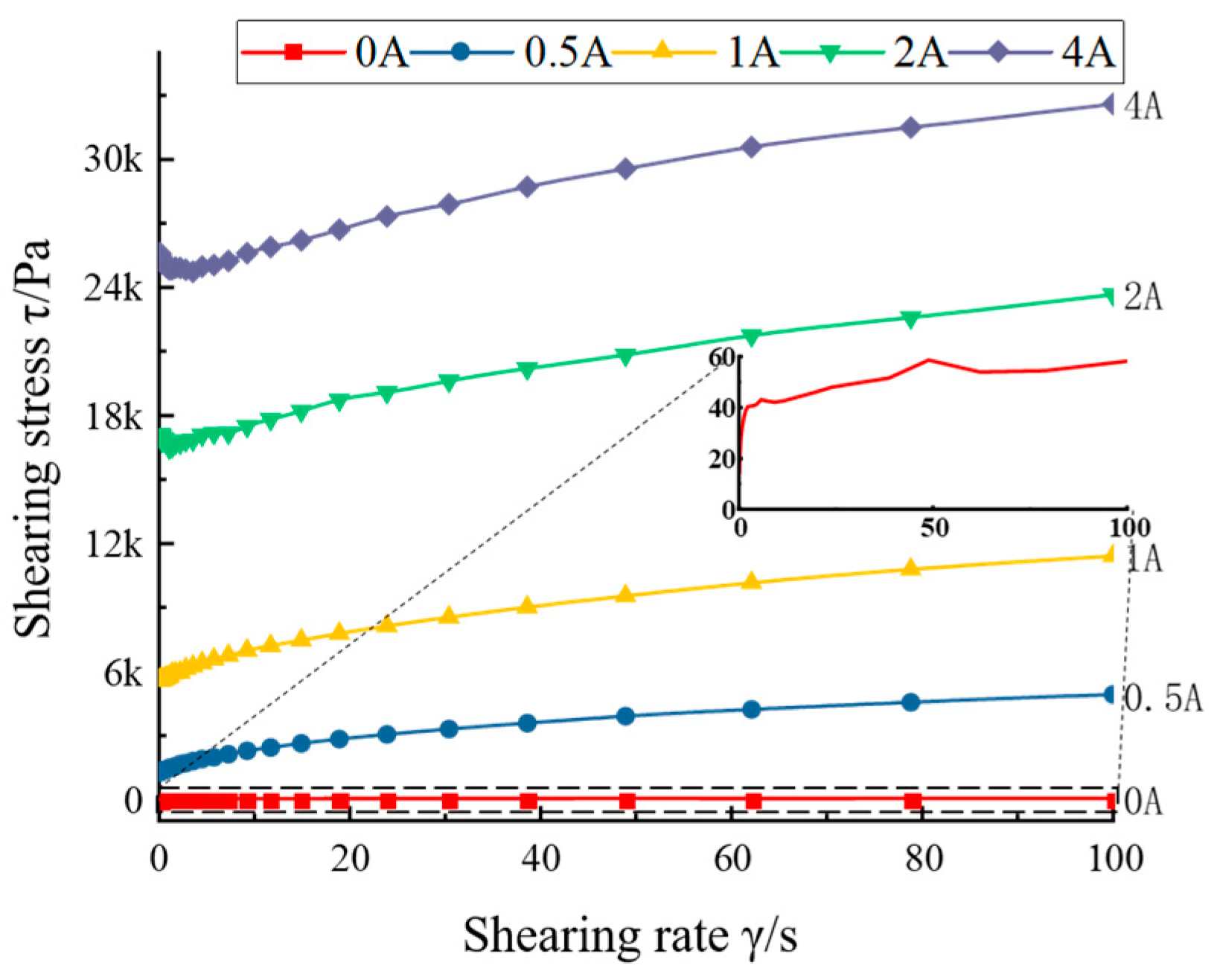
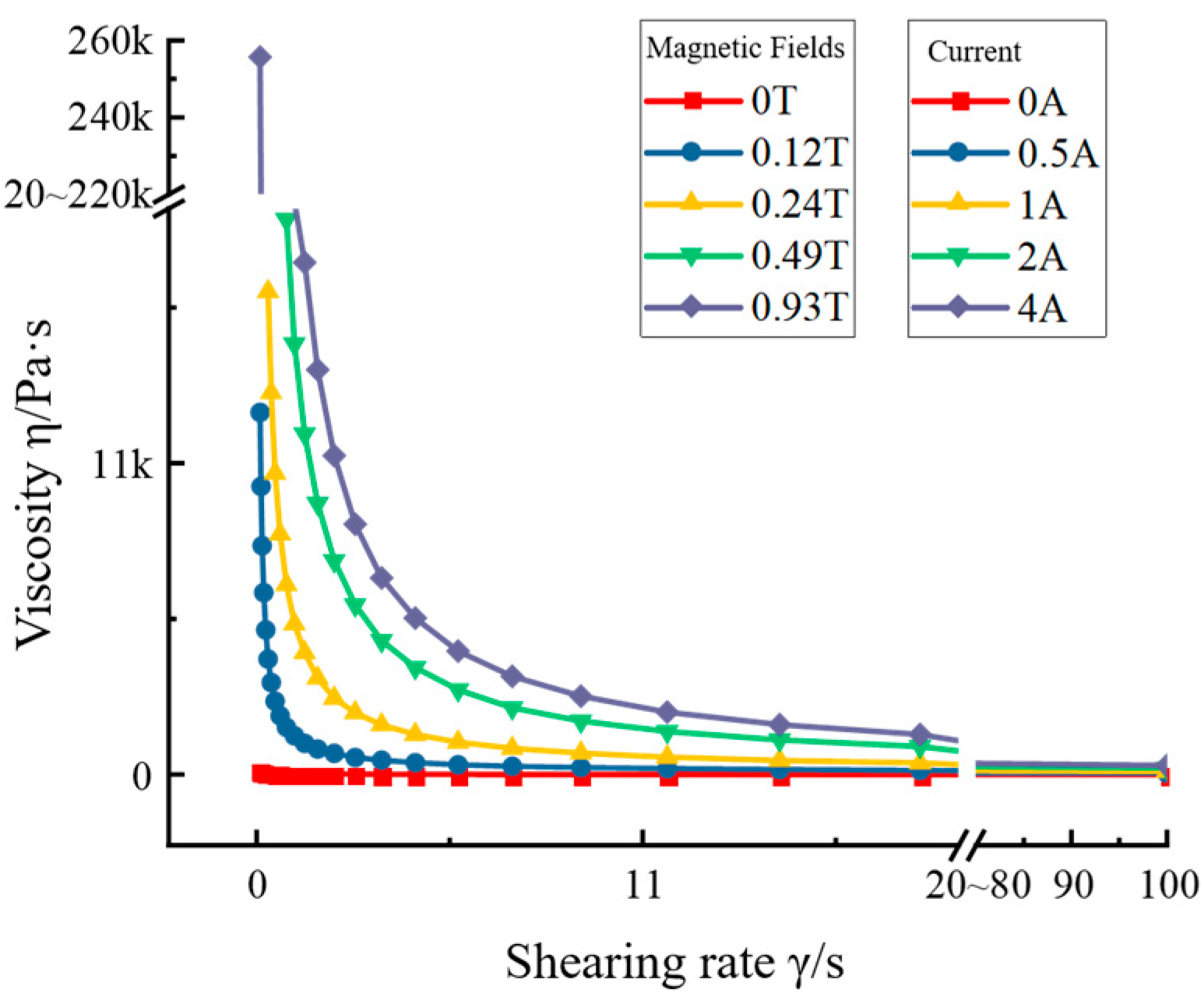
2.1. Magneto-Rheological Grease Material
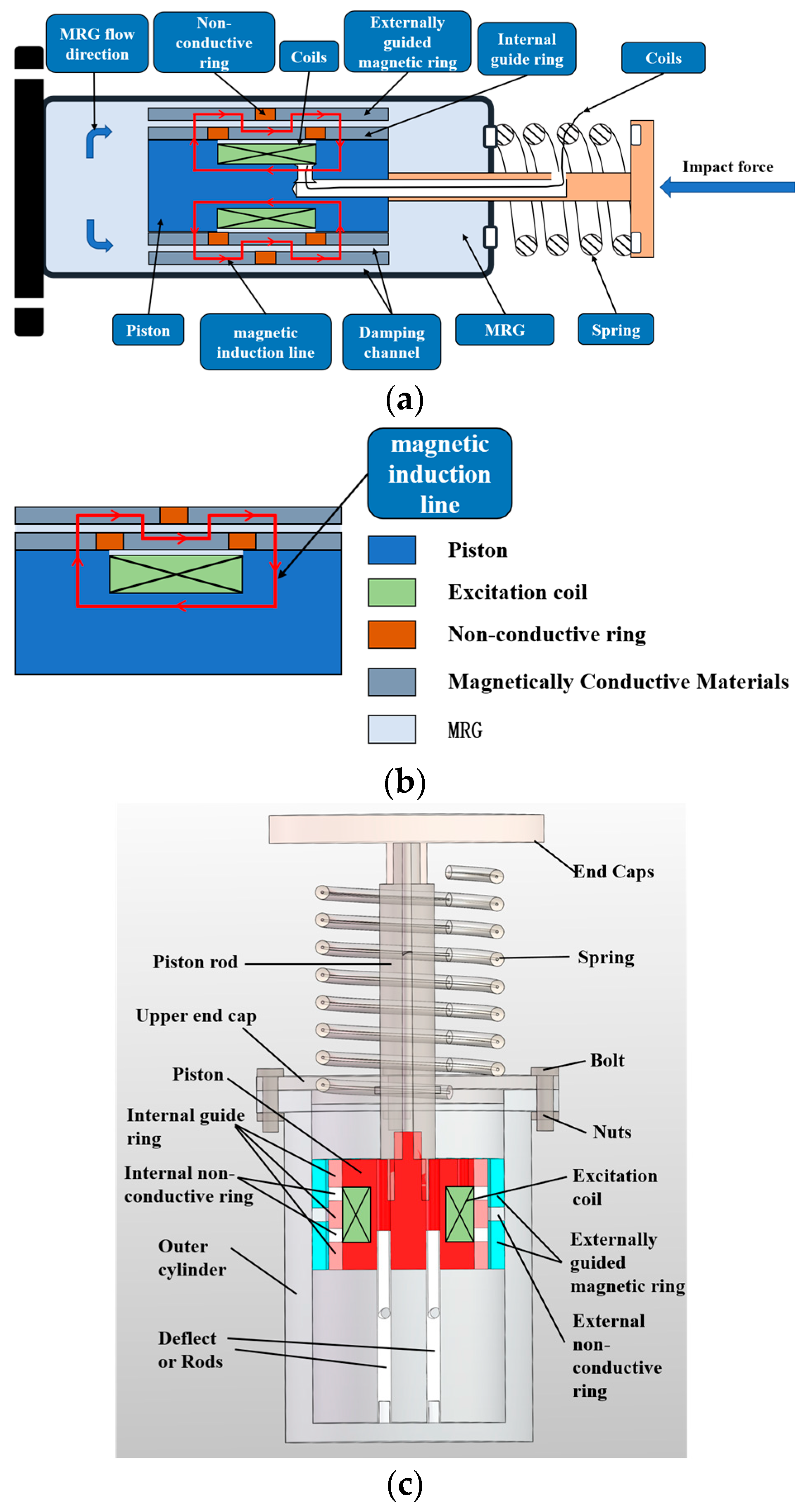
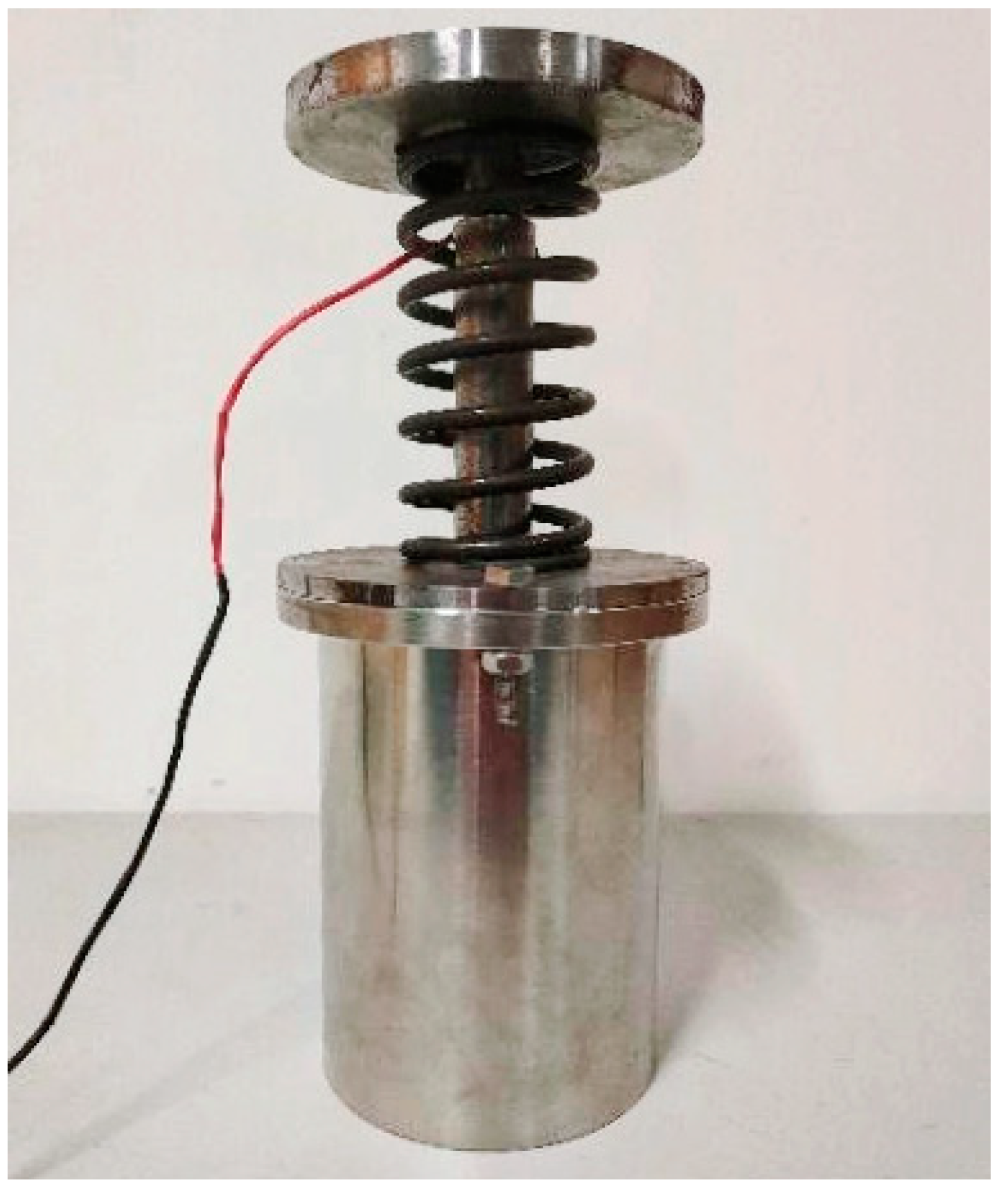
2.2. Structural Form
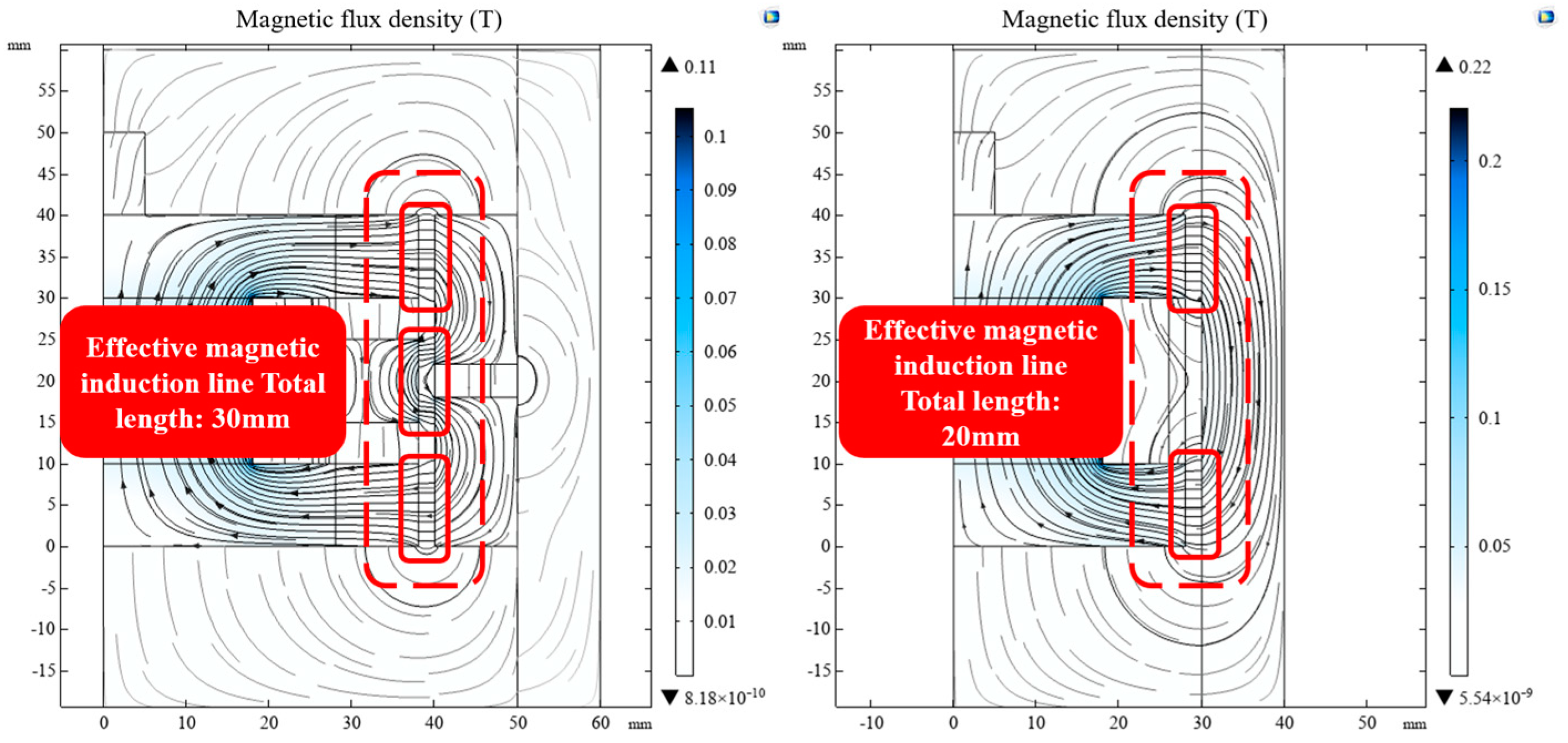
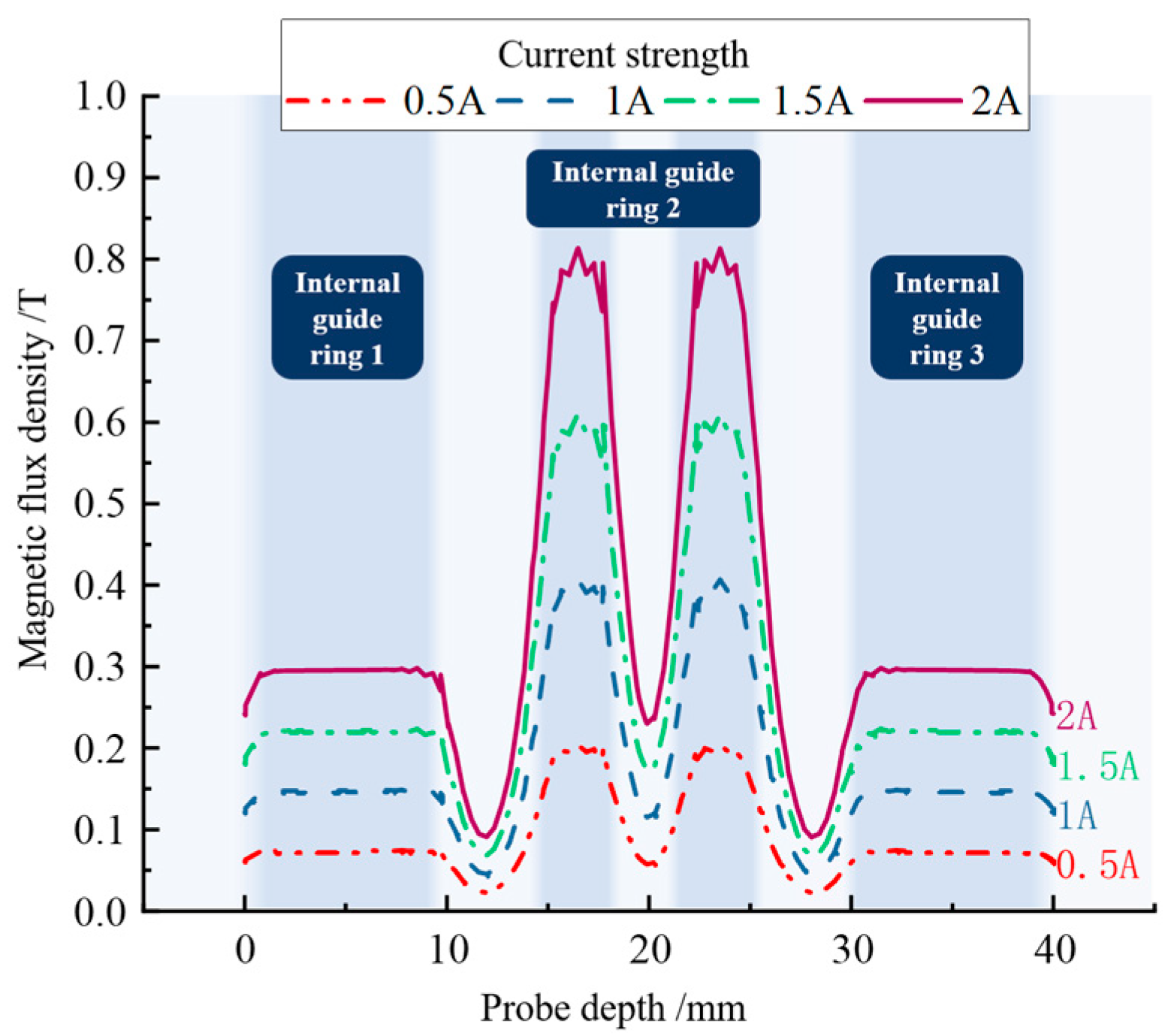
2.3. Analysis of Magnetic Field Simulation Results
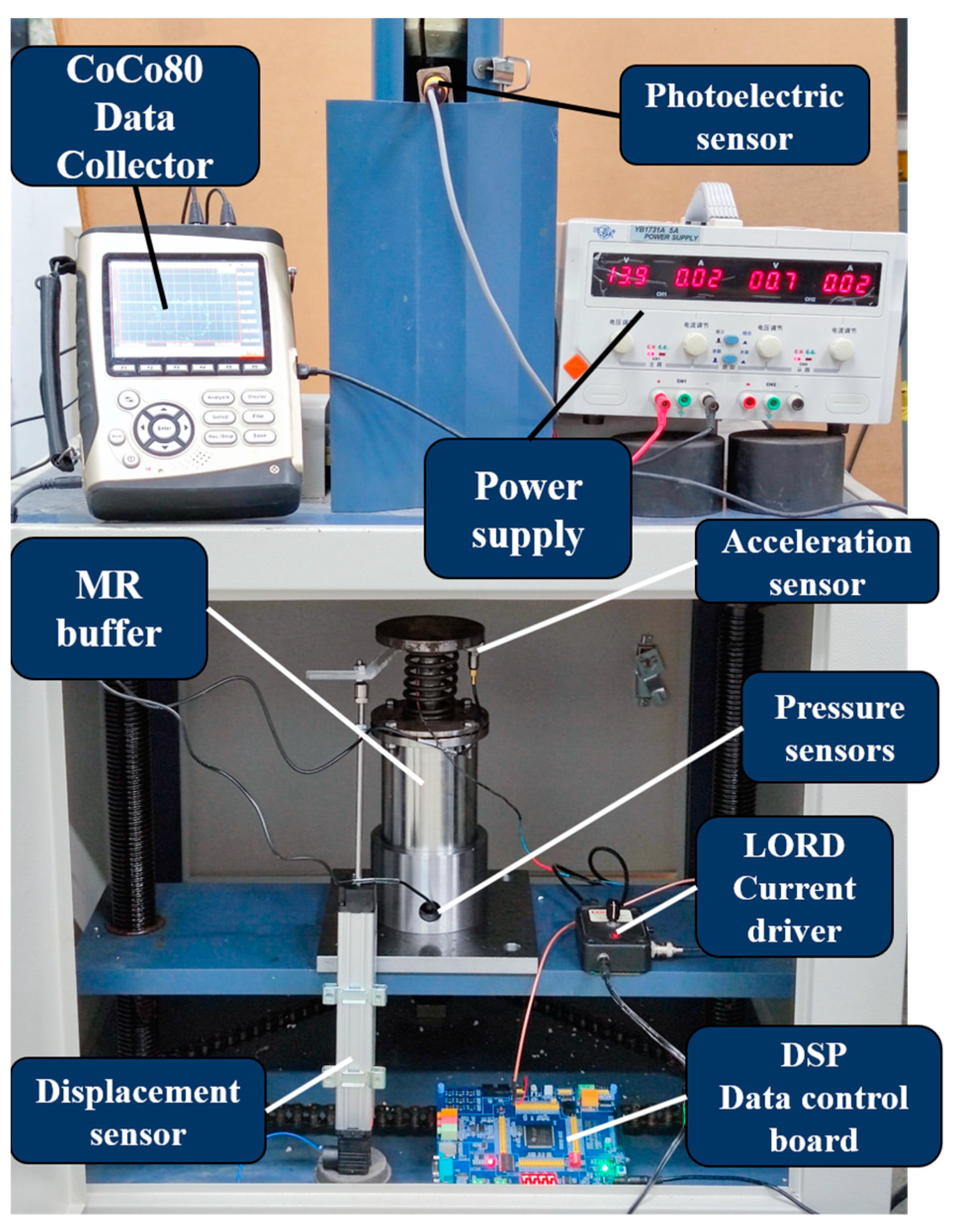
3. Buffer Performance Test
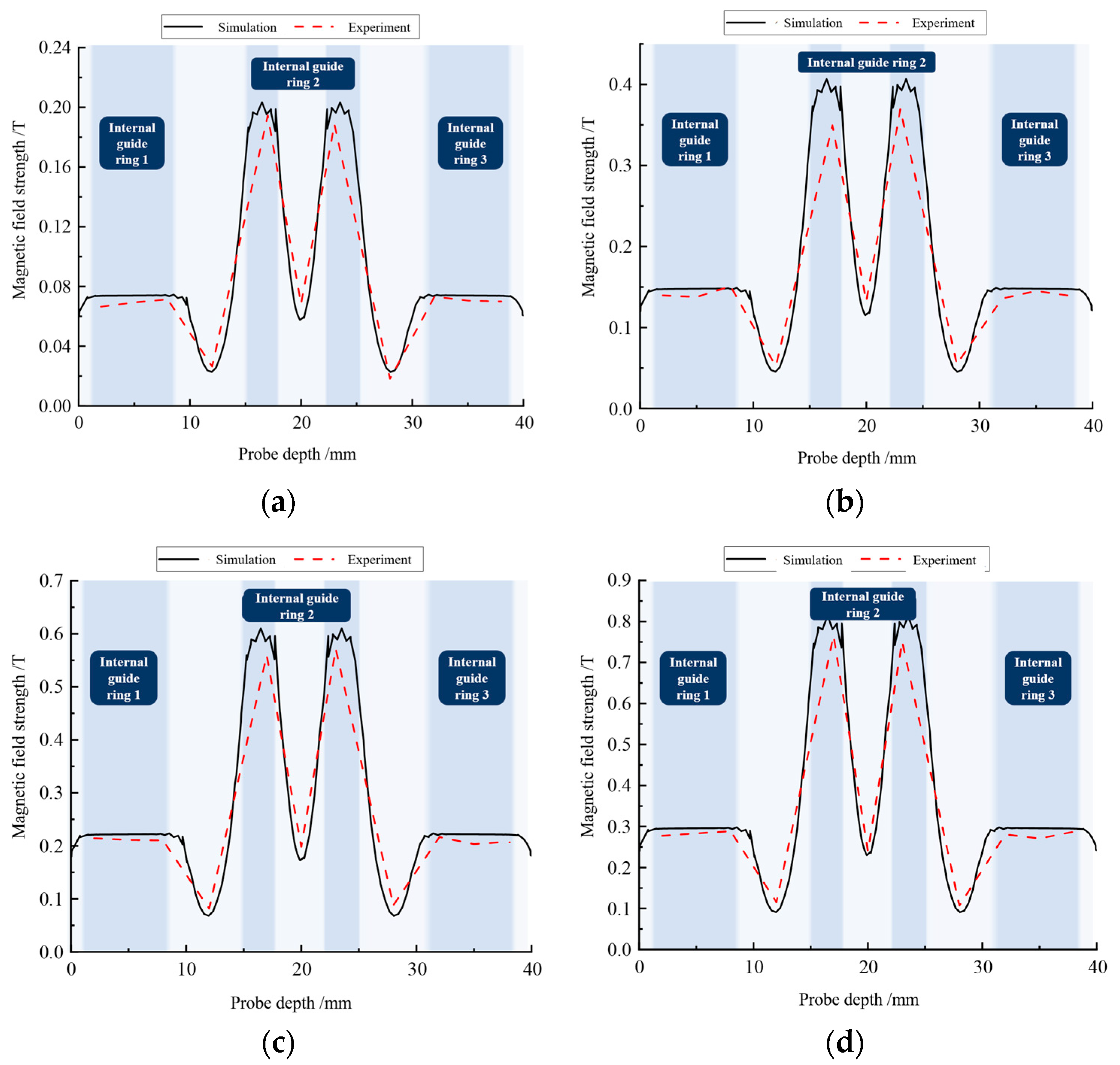
3.1. Magnetic Field Strength Test
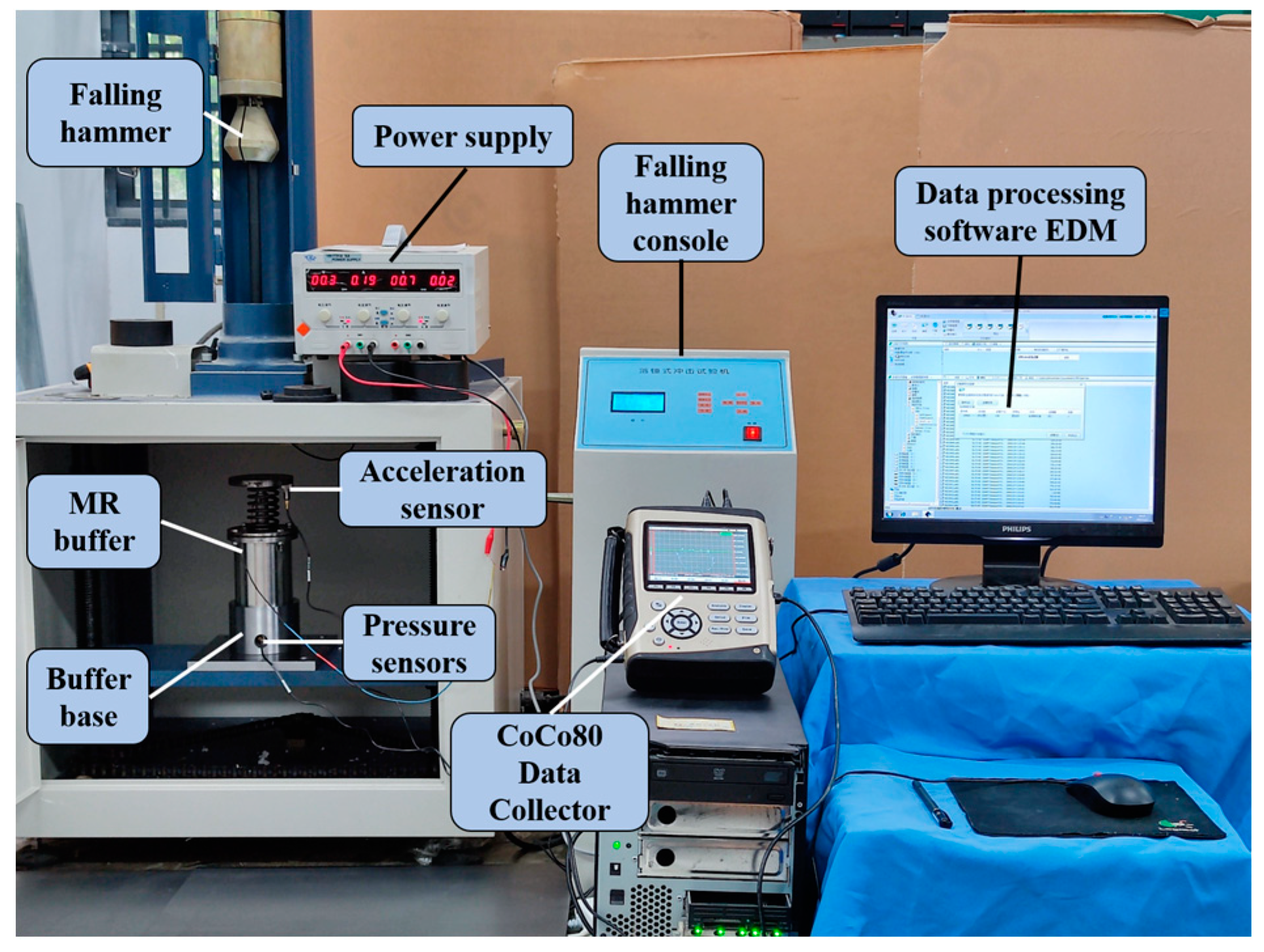
3.2. Mechanical Properties Testing
Buffering Characteristics
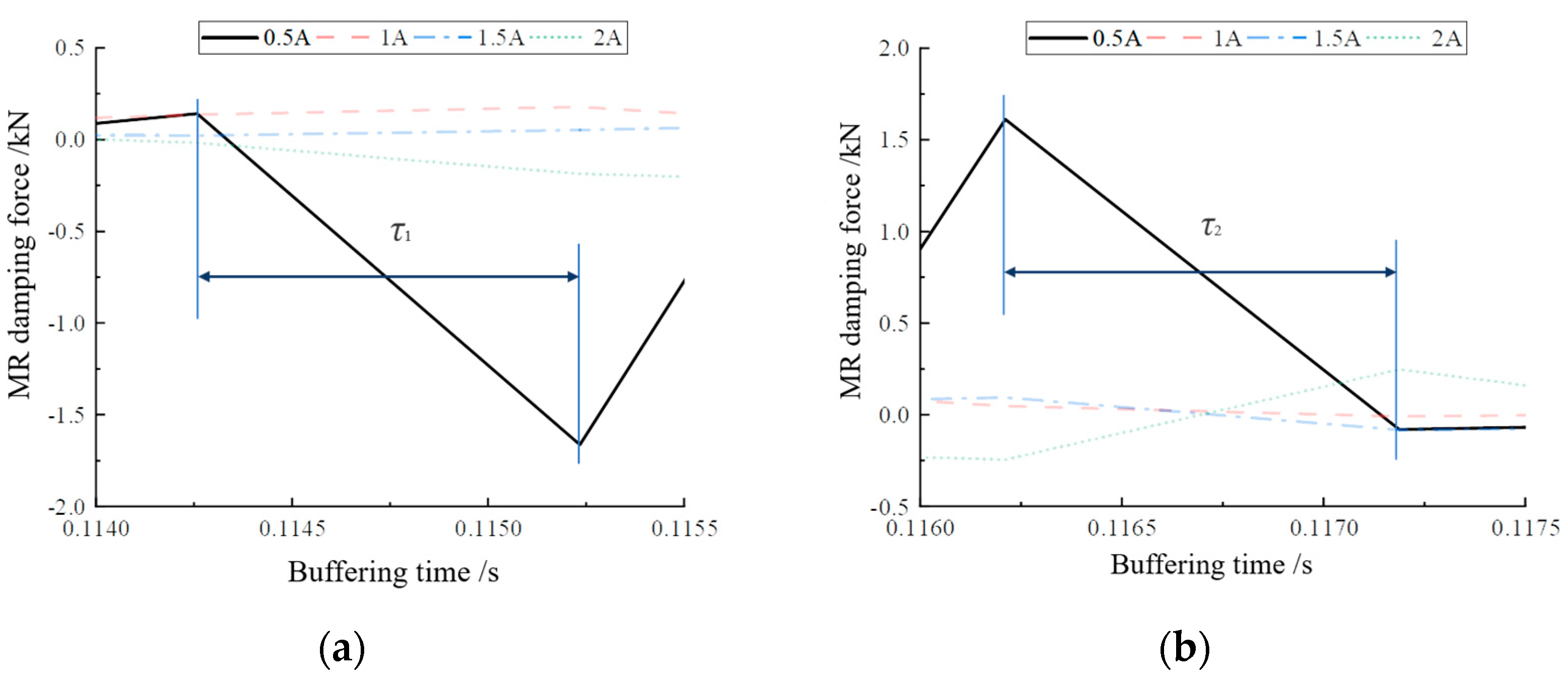
3.3. Response Time Test
4. Buffering Control Feasibility Experiments
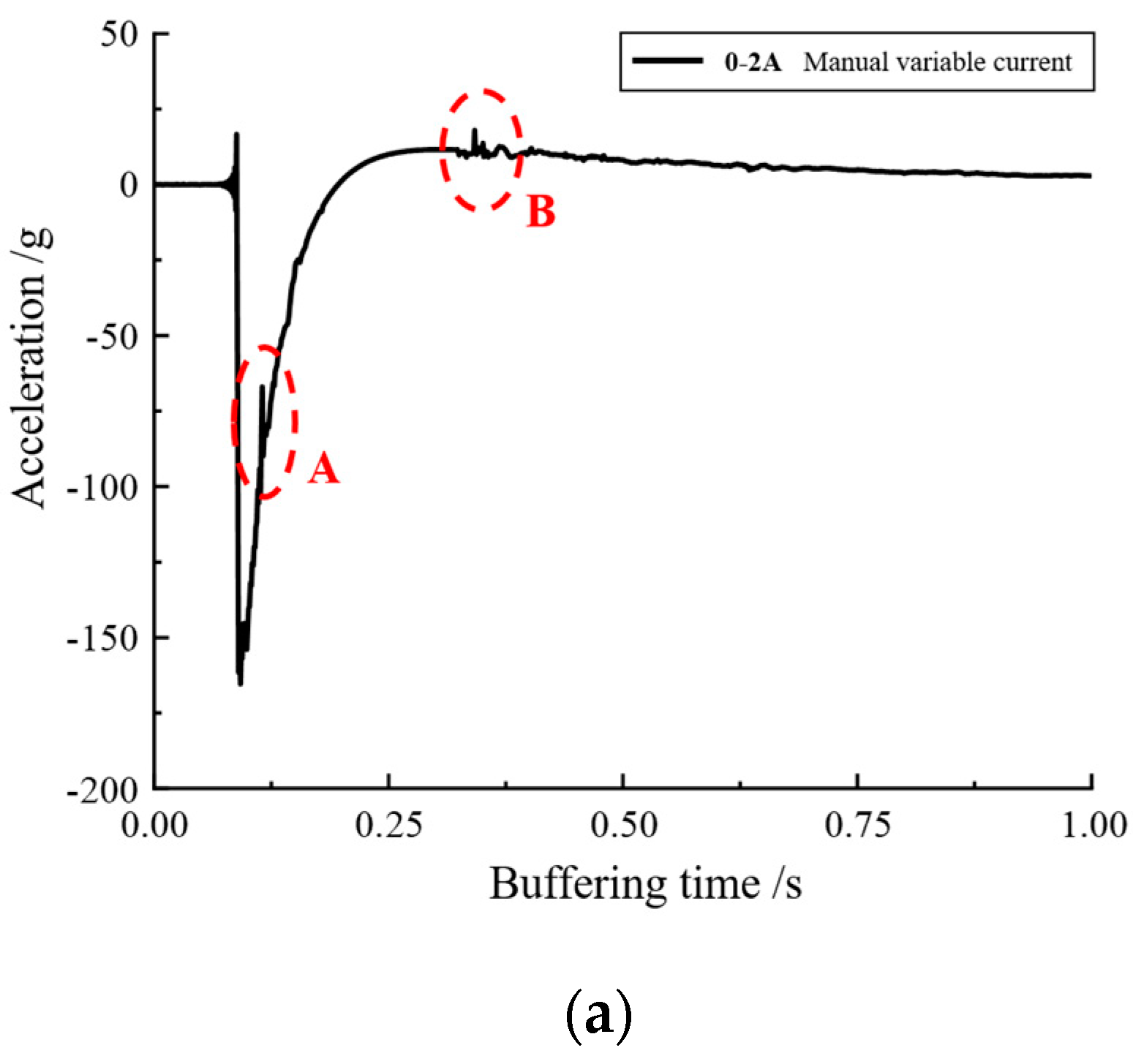
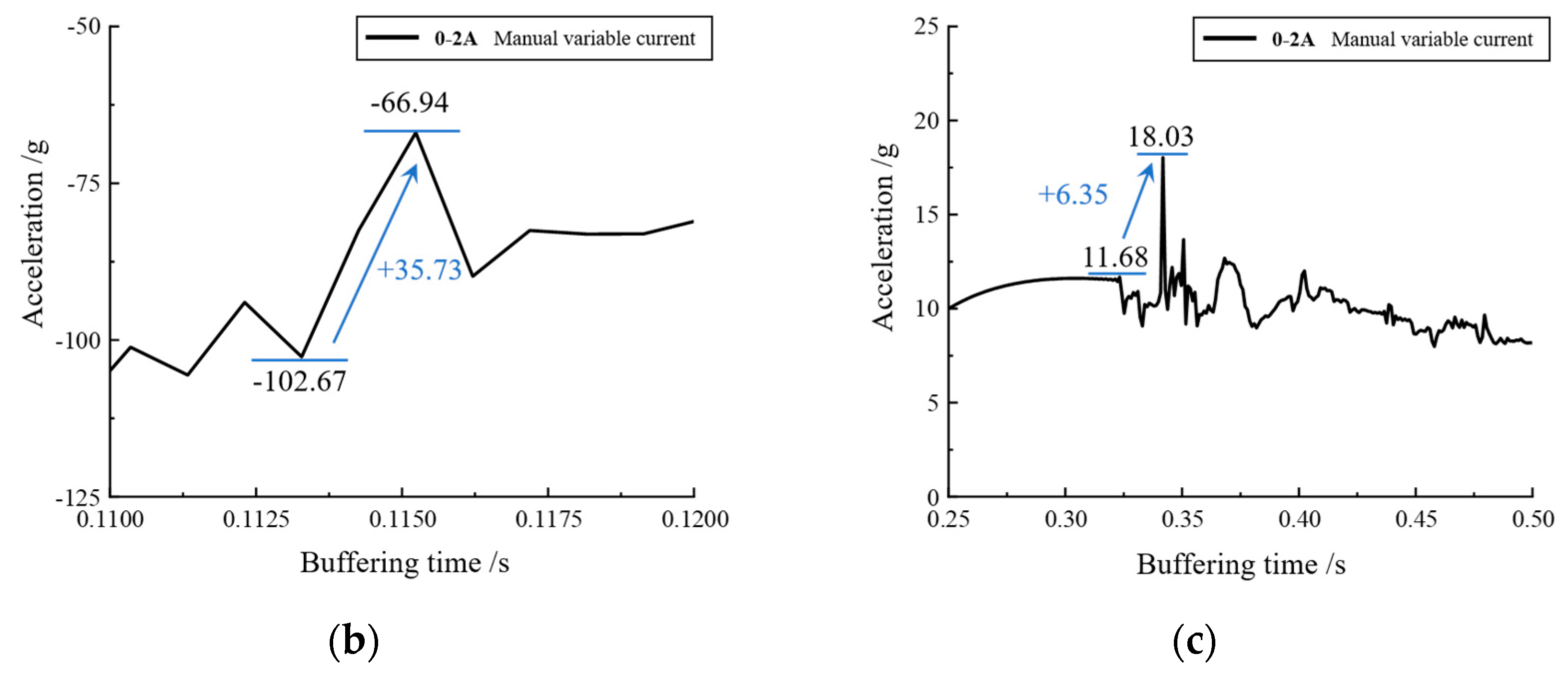
4.1. Manual Variable Current Control
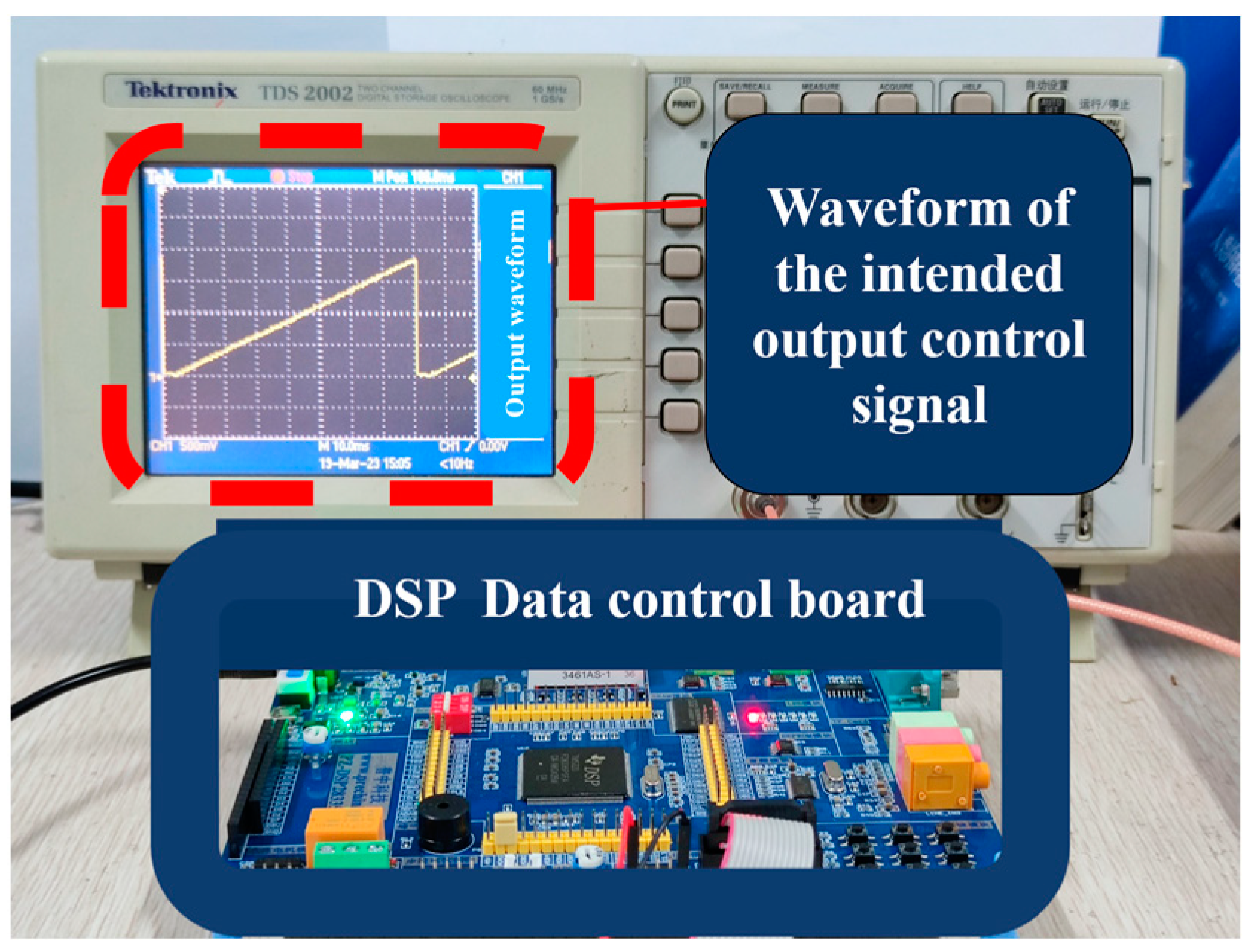
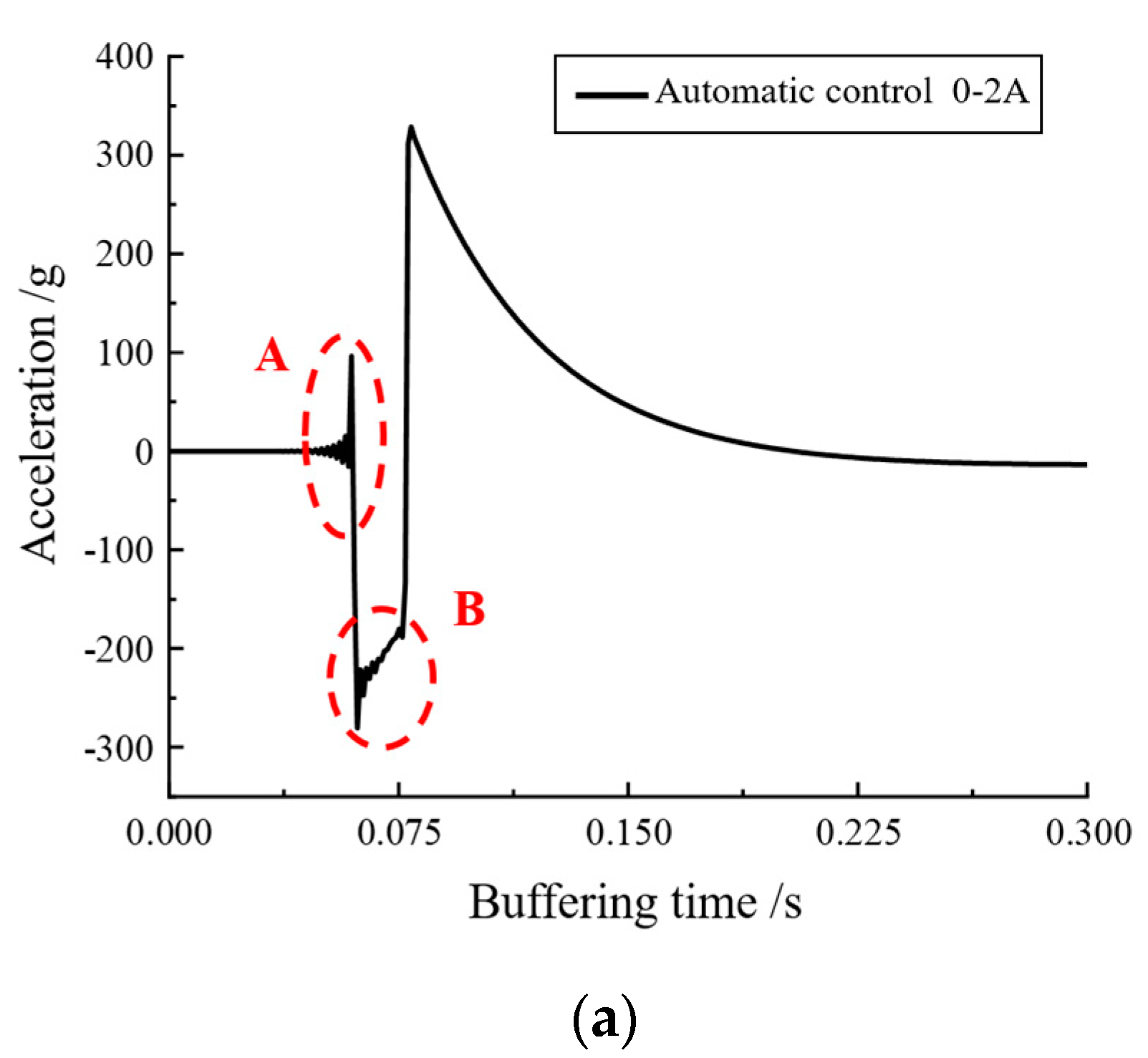
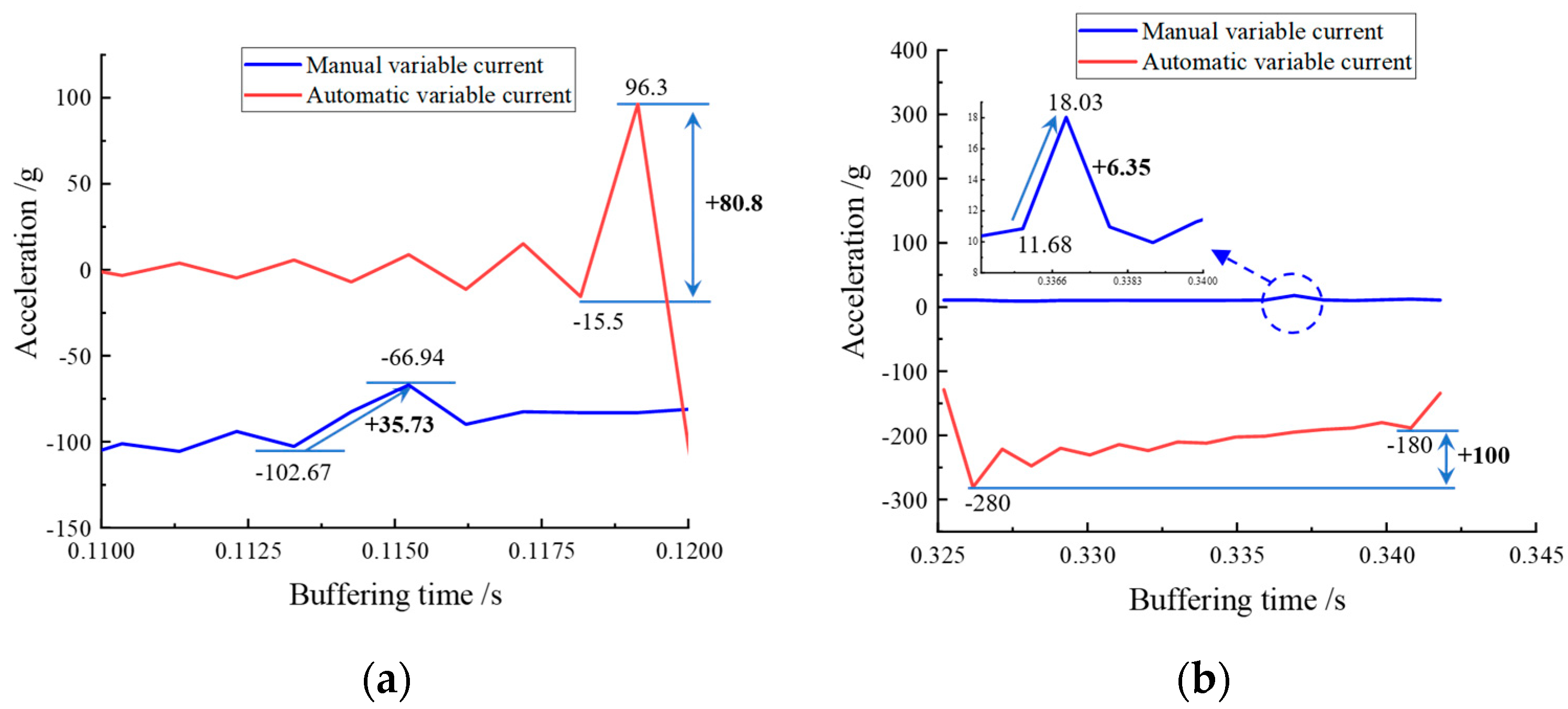
4.2. Automatic Variable Current Control
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, M.; Chen, Z.; Yan, H.; Choi, Y.-T.; Wereley, N.M. Optimal control of drop-induced shock mitigation using magnetorheological energy absorbers considering quadratic damping. J. Intell. Mater. Syst. Struct. 2021, 32, 1504–1517. [Google Scholar] [CrossRef]
- Li, W.; Bai, X.F.; Jiang, P.; Yuan, L.; Liu, H.; Gao, P.; Zhu, A.; Pan, J. Magnetorheological semi-active shock mitigation control. Part I: Numerical analysis and preliminary tests. J. Intell. Mater. Syst. Struct 2023, 1045389X221151071. [Google Scholar] [CrossRef]
- Choi, Y.-T.; Wereley, N.M. Drop-Induced Shock Mitigation Using Adaptive Magnetorheological Energy Absorbers Incorporating a Time Lag. J. Vib. Acoust. 2015, 137, 011010. [Google Scholar] [CrossRef]
- Yoon, J.-Y.; Kang, B.-H.; Kim, J.-H.; Choi, S.-B. New control logic based on mechanical energy conservation for aircraft landing gear system with magnetorheological dampers. Smart Mater. Struct. 2020, 29, 084003. [Google Scholar] [CrossRef]
- Kang, B.-H.; Yoon, J.-Y.; Kim, G.-W.; Choi, S.-B. Landing efficiency control of a six-degree-of-freedom aircraft model with magnetorheological dampers: Part 1—Modeling. J. Intell. Mater. Syst. Struct. 2020, 32, 1290–1302. [Google Scholar] [CrossRef]
- Luong, Q.-V.; Jo, B.-H.; Hwang, J.-H.; Jang, D.-S. A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear. Appl. Sci. 2021, 12, 400. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Z.; Wereley, N.M. Adaptive magnetorheological energy absorber control method for drop-induced shock mitigation. J. Intell. Mater. Syst. Struct. 2020, 32, 449–461. [Google Scholar] [CrossRef]
- Feng, Z.; Chen, Z.; Xing, X. An adaptive shock mitigation control method for helicopter seat system with magnetorheological energy absorbers. J. Intell. Mater. Syst. Struct. 2021, 33, 987–1001. [Google Scholar] [CrossRef]
- Marshall, J.T.; Riley, M.R. A Comparison of the Mechanical Shock Mitigation Performance of a Shock Isolation Seat Subjected to Laboratory Drop Tests and at-Sea Seakeeping Trials; NSWCCD80-TR-2020/015; Naval Surface Warfare Center: Crane, Indiana, 2020. [Google Scholar]
- Cheng, M.; Jiao, X. Modified active disturbance rejection control for non-linear semi-active vehicle suspension with magneto-rheological damper. Trans. Inst. Meas. Control. 2017, 40, 2611–2621. [Google Scholar] [CrossRef]
- Strecker, Z.; Jeniš, F.; Kubík, M.; Macháček, O.; Choi, S.-B. Novel Approaches to the Design of an Ultra-Fast Magnetorheological Valve for Semi-Active Control. Materials 2021, 14, 2500. [Google Scholar] [CrossRef]
- Kubík, M.; Šebesta, K.; Strecker, Z.; Jeniš, F.; Goldasz, J.; Mazůrek, I. Hydrodynamic response time of magnetorheological fluid in valve mode: Model and experimental verification. Smart Mater. Struct. 2021, 30, 125020. [Google Scholar] [CrossRef]
- Xu, F.H.; Xu, Z.D. Magnetic circuit analysis on multi-coil magnetorheological damper. J. Southeast Univ. 2016, 46, 100–104. [Google Scholar]
- Goncalves, F.D.; Ahmadian, M.; Carlson, J.D. Investigating the magnetorheological effect at high flow velocities. Smart Mater. Struct. 2005, 15, 75–85. [Google Scholar] [CrossRef]
- Carlson, J.D. Magneto-rheological fluid dampers for semi-active seismic control. In Proceedings of the International Conference Motion and Vibration Control, Chiba, Japan, 1–6 September 1996; pp. 35–40. [Google Scholar]
- Bai, X.-X.; Hu, W.; Wereley, N.M. Magnetorheological Damper Utilizing an Inner Bypass for Ground Vehicle Suspensions. IEEE Trans. Magn. 2013, 49, 3422–3425. [Google Scholar] [CrossRef]
- Bai, X.-X.; Yang, S. Hybrid controller of magnetorheological semi-active seat suspension system for both shock and vibration mitigation. J. Intell. Mater. Syst. Struct. 2019, 30, 1613–1628. [Google Scholar] [CrossRef]
- Yan, H.; Li, P.; Duan, C.; Dong, X. Studies with Rheological Behavior of Composite Lithium-Based Magnetorheological Grease. Metals 2021, 11, 1826. [Google Scholar] [CrossRef]
- Gu, X.; Li, Y.; Li, J. Investigations on response time of magnetorheological elastomer isolator for real-time control implementation. Smart Mater. Struct. 2016, 25, 11LT04. [Google Scholar] [CrossRef]
- Wang, C.; Nie, H.; Chen, J.; Lee, H.P. The design and dynamic analysis of a lunar lander with semi-active control. Acta Astronaut. 2018, 157, 145–156. [Google Scholar] [CrossRef]
- Maeda, T.; Otsuki, M.; Hashimoto, T. Protection against overturning of a lunar-planetary lander using a controlled landing gear. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2017, 233, 438–456. [Google Scholar] [CrossRef]
- Maeda, T.; Otsuki, M.; Hashimoto, T.; Hara, S. Attitude Stabilization for Lunar and Planetary Lander with Variable Damper. J. Guid. Control. Dyn. 2016, 39, 1790–1804. [Google Scholar] [CrossRef]
- Pan, G.; Hai, Y.; Teng-Yue, X.U. Tests and modeling for magneto-rheological dampers. J. Vib. Shock 2015, 34, 36–40. [Google Scholar]
- Li, Y.C. Research on Semi-Active Control of Magnetorheological Buffers under Impact Loading; Nanjing University of Science and Technology: Nanjing, China, 2007. [Google Scholar]
- Huixing, W.; Guang, Z.; Qing, O.; Jiong, W.A. Rheological properties of magnetorheological grease under shear mode. J. Shanghai Jiaotong Univ. 2019, 53, 380. [Google Scholar]
- Yan, M.; Meng, K.; Wu, Z.; Zhou, Y.; Yang, W. Rheological property of composite lithium based magnetorheological grease based on poly-alapha olefin synthetic base oil. Mater. Mech. Eng. 2021, 45, 20–24. [Google Scholar]
- Dai, J.; Chang, H.; Zhao, R.; Huang, J.; Li, K.; Xie, S. Investigation of the relationship among the microstructure, rheological properties of MR grease and the speed reduction performance of a rotary micro-brake. Mech. Syst. Signal Process. 2018, 116, 741–750. [Google Scholar] [CrossRef]
- Ouyang, Q.; Hu, H.; Zhao, W.; Wang, J.; Li, Z. Feasibility Analysis of Magnetorheological Absorber in Recoil Systems: Fixed and Field Artillery. Front. Mater. 2020, 7, 254. [Google Scholar] [CrossRef]
- Ouyang, Q.; Hu, H.; Qian, C.; Zhang, G.; Wang, J.; Zheng, J. Investigation of the Influence of Magnetic Field Distribution on the Magnetorheological Absorber With Individually Controllable Coils. IEEE Trans. Magn. 2019, 55, 1–13. [Google Scholar] [CrossRef]
- Koo, J.-H.; Goncalves, F.D.; Ahmadian, M. A comprehensive analysis of the response time of MR dampers. Smart Mater. Struct. 2006, 15, 351–358. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameters | Value |
|---|---|
| Density | 6.5 g/cm3 |
| Viscosity ( = 10 s−1, 10 °C) | 8 Pa·s |
| Flux saturation density | 1.31 T |
| Operating temperature | −40 to 130 °C |
| Parameters | Value (mm) |
|---|---|
| Top end cap diameter | 100 |
| Inner diameter of cylinder barrel | 70 |
| Cylinder wall thickness | 10 |
| Piston diameter | 45 |
| Piston coil groove length | 25 |
| Piston coil groove width | 10 |
| Inner guide ring diameter | 58 |
| Inner resistance ring diameter | 58 |
| Outer ring diameter | 70 |
| Outer resistance ring diameter | 70 |
| Damping clearance | 2 |
| Piston rod diameter | 20 |
| Piston rod length | 130 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, G.; Ouyang, Q.; Hu, H.; Xiang, W.; Zhao, W. Structural Design and Controllability of Magnetorheological Grease Buffers under Impact Loading. Materials 2023, 16, 4724. https://doi.org/10.3390/ma16134724
Kong G, Ouyang Q, Hu H, Xiang W, Zhao W. Structural Design and Controllability of Magnetorheological Grease Buffers under Impact Loading. Materials. 2023; 16(13):4724. https://doi.org/10.3390/ma16134724
Chicago/Turabian StyleKong, Gaoyang, Qing Ouyang, Hongsheng Hu, Wenfeng Xiang, and Wei Zhao. 2023. "Structural Design and Controllability of Magnetorheological Grease Buffers under Impact Loading" Materials 16, no. 13: 4724. https://doi.org/10.3390/ma16134724
APA StyleKong, G., Ouyang, Q., Hu, H., Xiang, W., & Zhao, W. (2023). Structural Design and Controllability of Magnetorheological Grease Buffers under Impact Loading. Materials, 16(13), 4724. https://doi.org/10.3390/ma16134724