
Biomimetic Venus Flytrap Structures Using Smart Composites: A Review





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
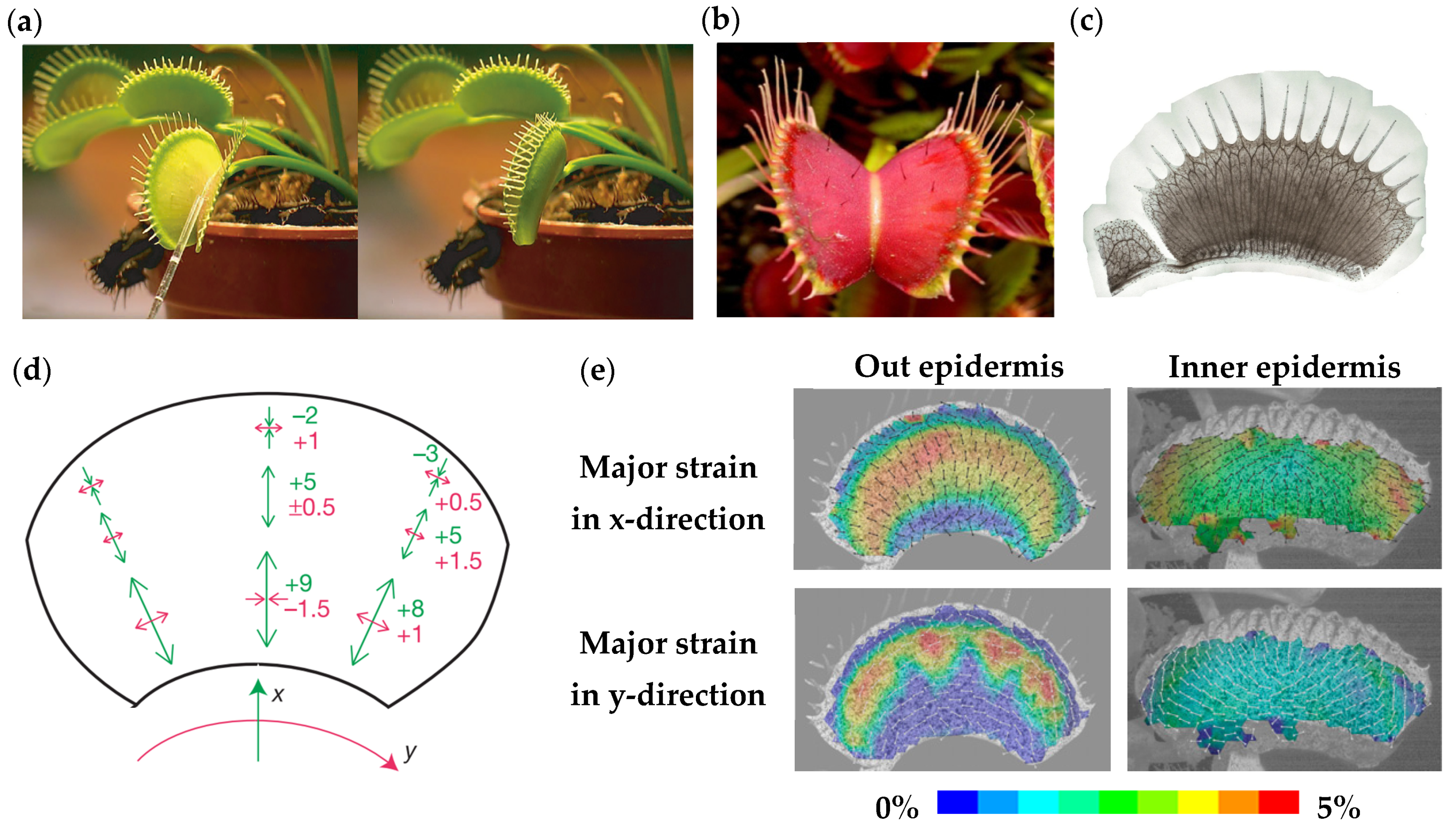
2. Biomechanics of Venus Flytrap
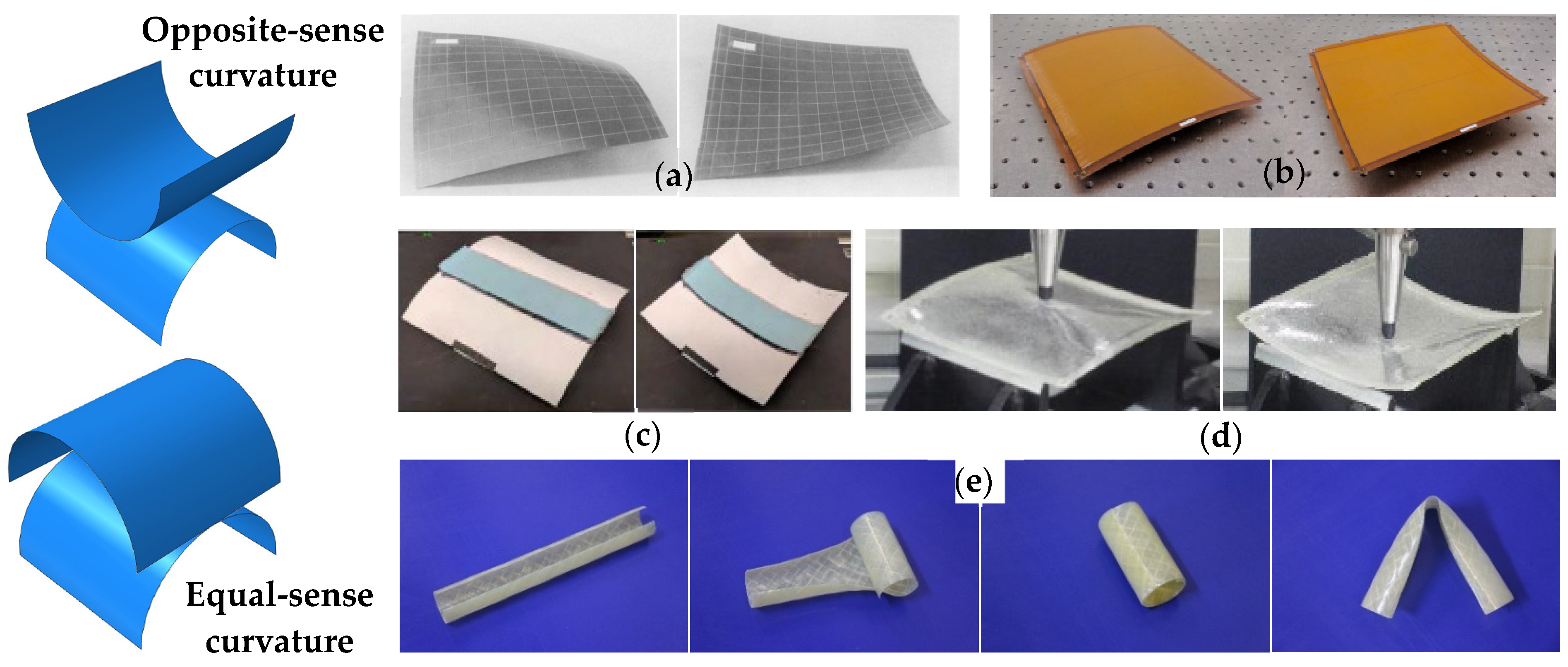
3. Smart Composite Technology
4. Biomimetic Venus Flytrap Structures
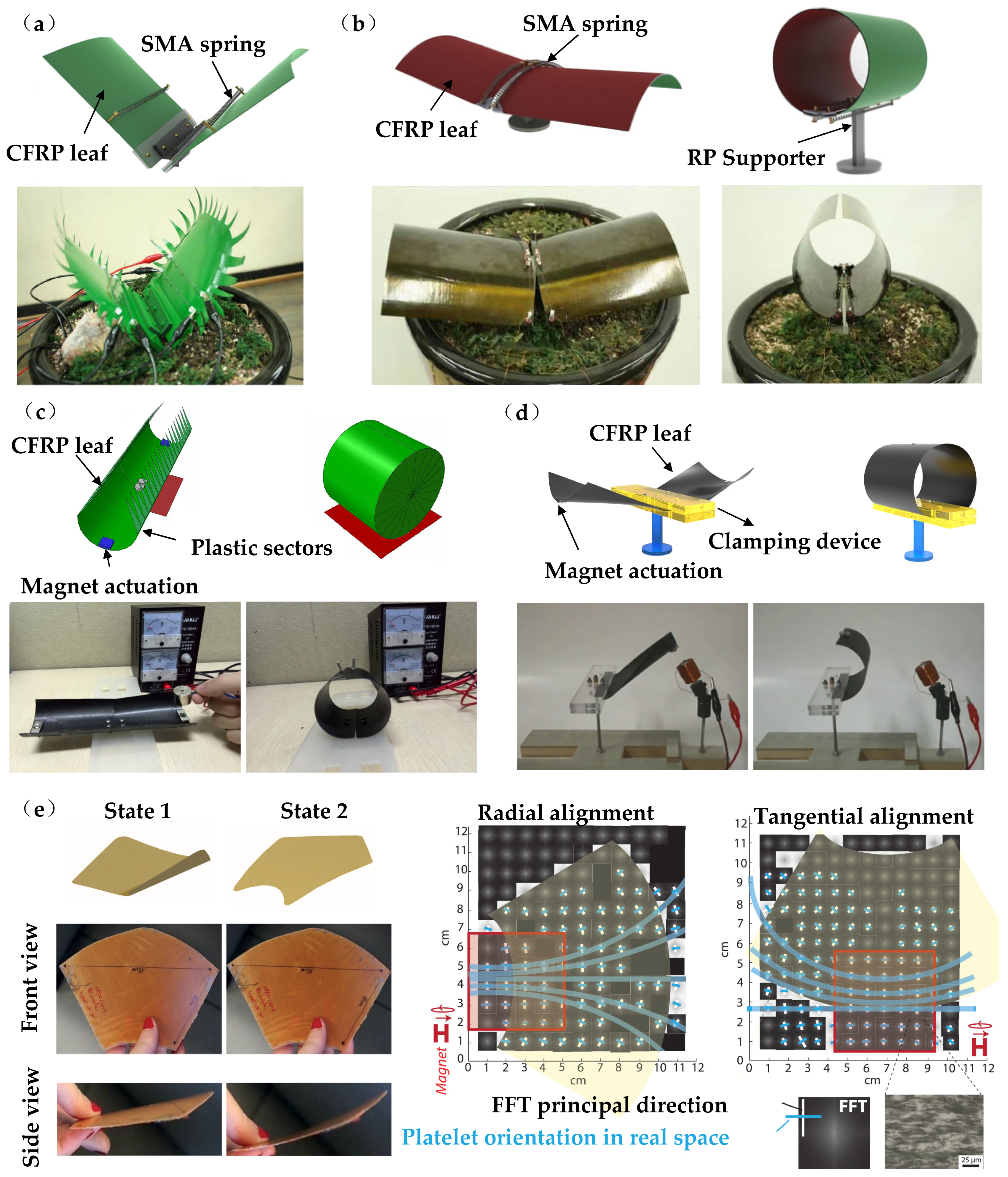
4.1. Electric-Driven Sensing and Actuation
4.2. Water-Driven Sensing and Actuation
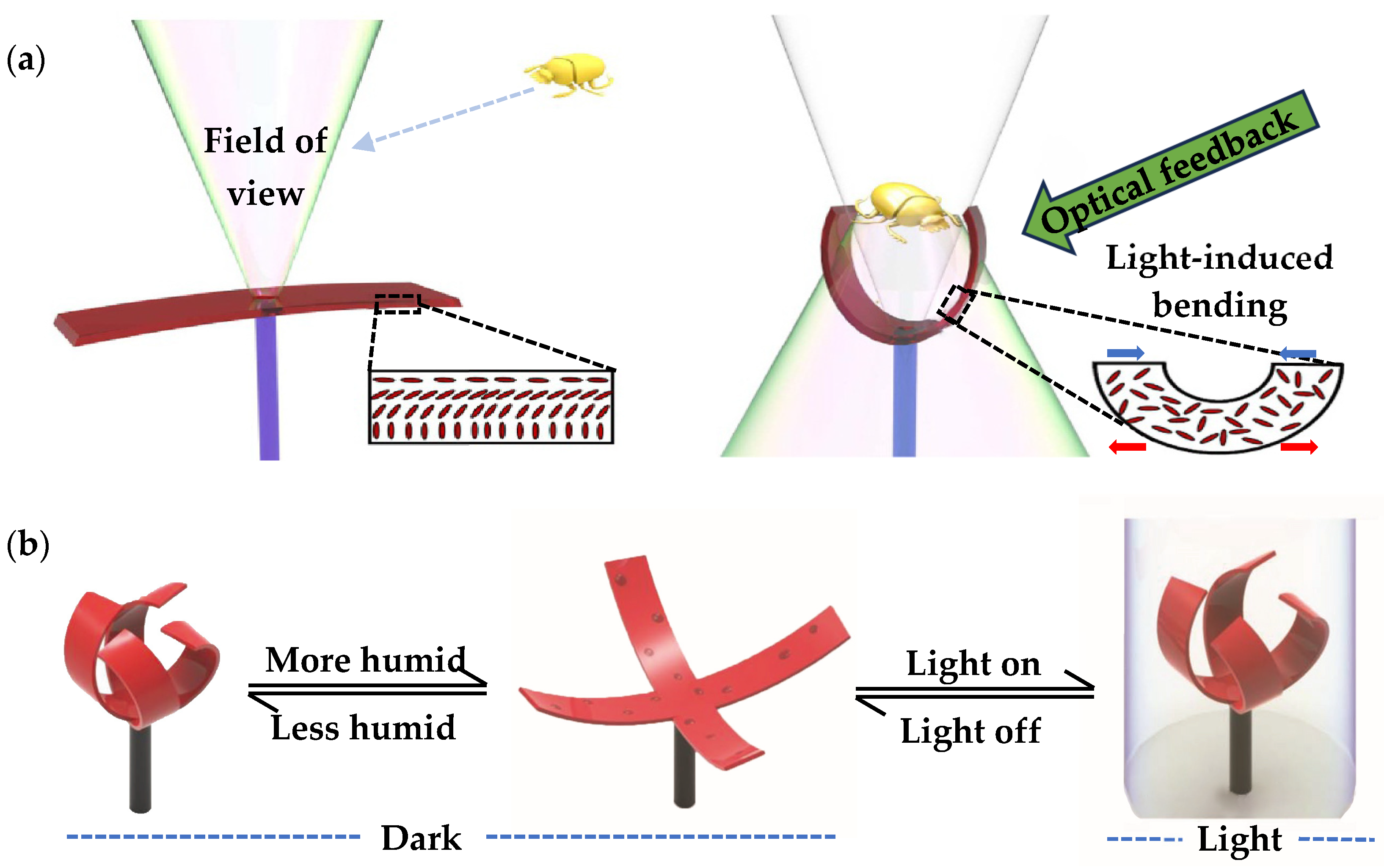
4.3. Light-Driven Sensing and Actuation
4.4. Elastic Energy-Driven Rapid Snap-Trapping
5. Conclusions and Future Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wegst, U.G.K.; Bai, H.; Saiz, E.; Tomsia, A.P.; Ritchie, R.O. Bioinspired Structural Materials. Nat. Mater. 2015, 14, 23–36. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Wang, K.W. Plant-Inspired Adaptive Structures and Materials for Morphing and Actuation: A Review. Bioinspir. Biomim. 2017, 12, 011001. [Google Scholar] [CrossRef] [PubMed]
- Zirbel, S.A.; Lang, R.J.; Thomson, M.W.; Sigel, D.A.; Walkemeyer, P.E.; Trease, B.P.; Magleby, S.P.; Howell, L.L. Accommodating Thickness in Origami-Based Deployable Arrays1. J. Mech. Des. Trans. ASME 2013, 135, 111005. [Google Scholar] [CrossRef]
- Roberts, T.J.; Azizi, E. Flexible Mechanisms: The Diverse Roles of Biological Springs in Vertebrate Movement. J. Exp. Biol. 2011, 214, 353–361. [Google Scholar] [CrossRef]
- Moulton, D.E.; Lessinnes, T.; O’Keeffe, S.; Dorfmann, L.; Goriely, A. The Elastic Secrets of the Chameleon Tongue. Proc. R. Soc. A Math. Phys. Eng. Sci. 2016, 472, 20160030. [Google Scholar] [CrossRef]
- Smith, M.L.; Yanega, G.M.; Ruina, A. Elastic Instability Model of Rapid Beak Closure in Hummingbirds. J. Theor. Biol. 2011, 282, 41–51. [Google Scholar] [CrossRef] [PubMed]
- Forterre, Y.; Skotheim, J.M.; Dumais, J.; Mahadevan, L. How the Venus Flytrap Snaps. Nature 2005, 433, 421–425. [Google Scholar] [CrossRef] [PubMed]
- Guo, Q.; Dai, E.; Han, X.; Xie, S.; Chao, E.; Chen, Z. Fast Nastic Motion of Plants and Bioinspired Structures. J. R. Soc. Interface 2015, 12, 20150598. [Google Scholar] [CrossRef]
- Cao, Y.; Derakhshani, M.; Fang, Y.; Huang, G.; Cao, C. Bistable Structures for Advanced Functional Systems. Adv. Funct. Mater. 2021, 31, 2106231. [Google Scholar] [CrossRef]
- Chi, Y.; Li, Y.; Zhao, Y.; Hong, Y.; Tang, Y.; Yin, J. Bistable and Multistable Actuators for Soft Robots: Structures, Materials, and Functionalities. Adv. Mater. 2022, 34, 2110384. [Google Scholar] [CrossRef]
- Wang, B.; Ge, C.; Fancey, K.S. Snap-through Behaviour of a Bistable Structure Based on Viscoelastically Generated Prestress. Compos. Part B Eng. 2017, 114, 23–33. [Google Scholar] [CrossRef]
- Esser, F.J.; Auth, P.; Speck, T. Artificial Venus Flytraps: A Research Review and Outlook on Their Importance for Novel Bioinspired Materials Systems. Front. Robot. AI 2020, 7, 75. [Google Scholar] [CrossRef] [PubMed]
- Poppinga, S.; Zollfrank, C.; Prucker, O.; Rühe, J.; Menges, A.; Cheng, T.; Speck, T. Toward a New Generation of Smart Biomimetic Actuators for Architecture. Adv. Mater. 2018, 30, 1703653. [Google Scholar] [CrossRef]
- Scherzer, S.; Federle, W.; Al-Rasheid, K.A.S.; Hedrich, R. Venus Flytrap Trigger Hairs Are Micronewton Mechano-Sensors That Can Detect Small Insect Prey. Nat. Plants 2019, 5, 670–675. [Google Scholar] [CrossRef] [PubMed]
- Williams, M.E.; Mozingo, H.N. The Fine Structure of the Trigger Hair in Venus’s Flytrap. Am. J. Bot. 1971, 58, 532–539. [Google Scholar] [CrossRef]
- Fabricant, A.; Iwata, G.Z.; Scherzer, S.; Bougas, L.; Rolfs, K.; Jodko-Władzińska, A.; Voigt, J.; Hedrich, R.; Budker, D. Action Potentials Induce Biomagnetic Fields in Carnivorous Venus Flytrap Plants. Sci. Rep. 2021, 11, 1438. [Google Scholar] [CrossRef] [PubMed]
- Volkov, A.G. Signaling in Electrical Networks of the Venus Flytrap (Dionaea muscipula Ellis). Bioelectrochemistry 2019, 125, 25–32. [Google Scholar] [CrossRef]
- Hill, B.S.; Findlay, G.P. The Power of Movement in Plants: The Role of Osmotic Machines. Q. Rev. Biophys. 1981, 14, 173–222. [Google Scholar] [CrossRef]
- Sachse, R.; Westermeier, A.; Mylo, M.; Nadasdi, J.; Bischoff, M.; Speck, T.; Poppinga, S. Snapping Mechanics of the Venus Flytrap (Dionaea muscipula). Proc. Natl. Acad. Sci. USA 2020, 117, 16035–16042. [Google Scholar] [CrossRef]
- Oliveira, J.; Correia, V.; Castro, H.; Martins, P.; Lanceros-Mendez, S. Polymer-Based Smart Materials by Printing Technologies: Improving Application and Integration. Addit. Manuf. 2018, 21, 269–283. [Google Scholar] [CrossRef]
- Mahmood, A.; Akram, T.; Shenggui, C.; Chen, H. Revolutionizing Manufacturing: A Review of 4D Printing Materials, Stimuli, and Cutting-Edge Applications. Compos. Part B Eng. 2023, 266, 110952. [Google Scholar] [CrossRef]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Mather, P.T.; Luo, X.; Rousseau, I.A. Shape Memory Polymer Research. Annu. Rev. Mater. Res. 2009, 39, 445–471. [Google Scholar] [CrossRef]
- Lin, X.; Wang, B.; Zhong, S.; Chen, H.; Liu, D. Smart Driving of a Bilayered Composite Tape-Spring Structure. J. Phys. Conf. Ser. 2022, 2403, 012042. [Google Scholar] [CrossRef]
- Zhao, Q.; Qi, H.J.; Xie, T. Recent Progress in Shape Memory Polymer: New Behavior, Enabling Materials, and Mechanistic Understanding. Prog. Polym. Sci. 2015, 49–50, 79–120. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, Y.; Yu, L.; Ji, K.; Li, D. A Review on the Tooling Technologies for Composites Manufacturing of Aerospace Structures: Materials, Structures and Processes. Compos. Part A Appl. Sci. Manuf. 2022, 154, 106762. [Google Scholar] [CrossRef]
- Yao, Y.; Zhou, T.; Wang, J.; Li, Z.; Lu, H.; Liu, Y.; Leng, J. ‘Two Way’ Shape Memory Composites Based on Electroactive Polymer and Thermoplastic Membrane. Compos. Part A Appl. Sci. Manuf. 2016, 90, 502–509. [Google Scholar] [CrossRef]
- Yang, H.; Lu, H.; Miao, Y.; Cong, Y.; Ke, Y.; Wang, J.; Yang, H.; Fu, J. Non-Swelling, Super-Tough, Self-Healing, and Multi-Responsive Hydrogels Based on Micellar Crosslinking for Smart Switch and Shape Memory. Chem. Eng. J. 2022, 450, 138346. [Google Scholar] [CrossRef]
- Deng, H.; Zhang, C.; Sattari, K.; Ling, Y.; Su, J.W.; Yan, Z.; Lin, J. 4D Printing Elastic Composites for Strain-Tailored Multistable Shape Morphing. ACS Appl. Mater. Interfaces 2021, 13, 12719–12725. [Google Scholar] [CrossRef]
- Fang, L.; Chen, S.; Fang, T.; Fang, J.; Lu, C.; Xu, Z. Shape-Memory Polymer Composites Selectively Triggered by near-Infrared Light of Two Certain Wavelengths and Their Applications at Macro-/Microscale. Compos. Sci. Technol. 2017, 138, 106–116. [Google Scholar] [CrossRef]
- Ze, Q.; Kuang, X.; Wu, S.; Wong, J.; Montgomery, S.M.; Zhang, R.; Kovitz, J.M.; Yang, F.; Qi, H.J.; Zhao, R. Magnetic Shape Memory Polymers with Integrated Multifunctional Shape Manipulation. Adv. Mater. 2020, 32, 1906657. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Xia, Y.; Wang, L.; Liu, L.; Liu, Y.; Leng, J. Conductive Shape Memory Microfiber Membranes with Core-Shell Structures and Electroactive Performance. ACS Appl. Mater. Interfaces 2018, 10, 35526–35532. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Xiong, L.; Ai, Y.; Liang, Z.; Liang, Q. Stretchable Multiresponsive Hydrogel with Actuatable, Shape Memory, and Self-Healing Properties. Adv. Sci. 2018, 5, 1800450. [Google Scholar] [CrossRef] [PubMed]
- Xia, Y.; He, Y.; Zhang, F.; Liu, Y.; Leng, J. A Review of Shape Memory Polymers and Composites: Mechanisms, Materials, and Applications. Adv. Mater. 2021, 33, 2000713. [Google Scholar] [CrossRef]
- Wang, B.; Fancey, K.S. Viscoelastically Prestressed Polymeric Matrix Composites: An Investigation into Fibre Deformation and Prestress Mechanisms. Compos. Part A Appl. Sci. Manuf. 2018, 111, 106–114. [Google Scholar] [CrossRef]
- Wang, B.; Zhong, S.; Lee, T.-L.; Fancey, K.S.; Mi, J. Non-Destructive Testing and Evaluation of Composite Materials/Structures: A State-of-the-Art Review. Adv. Mech. Eng. 2020, 12, 1687814020913761. [Google Scholar] [CrossRef]
- Hyer, M.W. Some Observations on the Cured Shape of Thin Unsymmetric Laminates. J. Compos. Mater. 1981, 15, 175–194. [Google Scholar] [CrossRef]
- Hyer, M.W. Calculations of the Room-Temperature Shapes of Unsymmetric Laminates. J. Compos. Mater. 1981, 15, 296–310. [Google Scholar] [CrossRef]
- Hyer, M.W. The Room-Temperature Shapes of Four-Layer Unsymmetric Cross-Ply Laminates. J. Compos. Mater. 1982, 16, 318–340. [Google Scholar] [CrossRef]
- Lachenal, X.; Daynes, S.; Weaver, P.M. A Non-Linear Stiffness Composite Twisting I-Beam. J. Intell. Mater. Syst. Struct. 2013, 25, 744–754. [Google Scholar] [CrossRef]
- Xu, B.; Wang, B.; Fancey, K.S.; Zhong, S.; Zhao, C.; Chen, X. A Bistable Helical Structure Based on Composite Tape-Springs. Compos. Commun. 2023, 43, 101723. [Google Scholar] [CrossRef]
- Dano, M.-L.; Hyer, M.W. Thermally-Induced Deformation Behavior of Unsymmetric Laminates. Int. J. Solids Struct. 1998, 35, 2101–2120. [Google Scholar] [CrossRef]
- Lee, A.J.; Moosavian, A.; Inman, D.J. A Piezoelectrically Generated Bistable Laminate for Morphing. Mater. Lett. 2017, 190, 123–126. [Google Scholar] [CrossRef]
- Lee, A.J.; Moosavian, A.; Inman, D.J. Control and Characterization of a Bistable Laminate Generated with Piezoelectricity. Smart Mater. Struct. 2017, 26, 085007. [Google Scholar] [CrossRef]
- Chillara, V.S.C.; Dapino, M.J. Stability Considerations and Actuation Requirements in Bistable Laminated Composites. Compos. Struct. 2018, 184, 1062–1070. [Google Scholar] [CrossRef]
- Daynes, S.; Potter, K.D.; Weaver, P.M. Bistable Prestressed Buckled Laminates. Compos. Sci. Technol. 2008, 68, 3431–3437. [Google Scholar] [CrossRef]
- Wang, B.; Fancey, K.S. A Bistable Morphing Composite Using Viscoelastically Generated Prestress. Mater. Lett. 2015, 158, 108–110. [Google Scholar] [CrossRef]
- Iqbal, K.; Pellegrino, S. Bi-Stable Composite Shells. In Proceedings of the 41st Structures, Structural Dynamics, and Materials Conference and Exhibit, Atlanta, GA, USA, 3–6 April 2000; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2000. [Google Scholar]
- Wang, B.; Seffen, K.A.; Guest, S.D.; Lee, T.-L.; Huang, S.; Luo, S.; Mi, J. In-Situ Multiscale Shear Failure of a Bistable Composite Tape-Spring. Compos. Sci. Technol. 2020, 200, 108348. [Google Scholar] [CrossRef]
- Yang, C.; Wang, B.; Zhong, S.; Zhao, C.; Liang, W. On Tailoring Deployable Mechanism of a Bistable Composite Tape-Spring Structure. Compos. Commun. 2022, 32, 101171. [Google Scholar] [CrossRef]
- Wang, B.; Fancey, K.S. Towards Optimisation of Load-Time Conditions for Producing Viscoelastically Prestressed Polymeric Matrix Composites. Compos. Part B Eng. 2016, 87, 336–342. [Google Scholar] [CrossRef]
- Daynes, S.; Weaver, P.M. Stiffness Tailoring Using Prestress in Adaptive Composite Structures. Compos. Struct. 2013, 106, 282–287. [Google Scholar] [CrossRef]
- Fancey, K.S. Viscoelastically Prestressed Polymeric Matrix Composites: An Overview. J. Reinf. Plast. Compos. 2016, 35, 1290–1301. [Google Scholar] [CrossRef]
- Chen, H.; Yu, F.; Wang, B.; Zhao, C.; Chen, X.; Nsengiyumva, W.; Zhong, S. Elastic Fibre Prestressing Mechanics within a Polymeric Matrix Composite. Polymers 2023, 15, 431. [Google Scholar] [CrossRef] [PubMed]
- Seffen, K.A.; Wang, B.; Guest, S.D. Folded Orthotropic Tape-Springs. J. Mech. Phys. Solids 2019, 123, 138–148. [Google Scholar] [CrossRef]
- Shahinpoor, M. Biomimetic Robotic Venus Flytrap (Dionaea muscipula Ellis) Made with Ionic Polymer Metal Composites. Bioinspir. Biomim. 2011, 6, 046004. [Google Scholar] [CrossRef]
- Shi, L.; Guo, S. Development and Evaluation of a Venus Flytrap-inspired Microrobot. Microsyst. Technol. 2016, 22, 1949–1958. [Google Scholar] [CrossRef]
- Colombani, M.; Forterre, Y. Biomechanics of Rapid Movements in Plants: Poroelastic Measurements at the Cell Scale. Comput. Methods Biomech. Biomed. Eng. 2011, 14, 115–117. [Google Scholar] [CrossRef]
- Lee, H.; Xia, C.; Fang, N.X. First Jump of Microgel; Actuation Speed Enhancement by Elastic Instability. Soft Matter 2010, 6, 4342–4345. [Google Scholar] [CrossRef]
- Athas, J.C.; Nguyen, C.P.; Zarket, B.C.; Gargava, A.; Nie, Z.; Raghavan, S.R. Enzyme-Triggered Folding of Hydrogels: Toward a Mimic of the Venus Flytrap. ACS Appl. Mater. Interfaces 2016, 8, 19066–19074. [Google Scholar] [CrossRef]
- Fan, W.; Shan, C.; Guo, H.; Sang, J.; Wang, R.; Zheng, R.; Sui, K.; Nie, Z. Dual-Gradient Enabled Ultrafast Biomimetic Snapping of Hydrogel Materials. Sci. Adv. 2019, 5, eaav7174. [Google Scholar] [CrossRef]
- Lunni, D.; Cianchetti, M.; Filippeschi, C.; Sinibaldi, E.; Mazzolai, B. Plant-Inspired Soft Bistable Structures Based on Hygroscopic Electrospun Nanofibers. Adv. Mater. Interfaces 2020, 7, 1901310. [Google Scholar] [CrossRef]
- Wani, O.M.; Zeng, H.; Priimagi, A. A Light-Driven Artificial Flytrap. Nat. Commun. 2017, 8, 15546. [Google Scholar] [CrossRef] [PubMed]
- Wani, O.M.; Verpaalen, R.; Zeng, H.; Priimagi, A.; Schenning, A.P.H.J. An Artificial Nocturnal Flower via Humidity-Gated Photoactuation in Liquid Crystal Networks. Adv. Mater. 2019, 31, e1805985. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Seffen, K.A.; Guest, S.D. Folded Strains of a Bistable Composite Tape-Spring. Int. J. Solids Struct. 2021, 233, 111221. [Google Scholar] [CrossRef]
- Kim, S.W.; Koh, J.S.; Cho, M.; Cho, K.J. Towards a Bio-Mimetic Flytrap Robot Based on a Snap-through Mechanism. In Proceedings of the 2010 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, BioRob 2010, Tokyo, Japan, 26–29 September 2010; pp. 534–539. [Google Scholar]
- Kim, S.W.; Koh, J.S.; Cho, M.; Cho, K.J. Design & Analysis a Flytrap Robot Using Bi-Stable Composite. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 215–220. [Google Scholar]
- Kim, S.W.; Koh, J.S.; Lee, J.G.; Ryu, J.; Cho, M.; Cho, K.J. Flytrap-Inspired Robot Using Structurally Integrated Actuation Based on Bistability and a Developable Surface. Bioinspir. Biomim. 2014, 9, 036004. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, D.; Wu, H.; Bao, Y.; Chai, G. Non-Contact Magnetic Driving Bioinspired Venus Flytrap Robot Based on Bistable Anti-Symmetric CFRP Structure. Compos. Struct. 2016, 135, 17–22. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Yu, X.; Chai, H.; Li, Y.; Wu, H.; Jiang, S. Magnetic Actuation Bionic Robotic Gripper with Bistable Morphing Structure. Compos. Struct. 2019, 229, 111422. [Google Scholar] [CrossRef]
- Schmied, J.U.; Le Ferrand, H.; Ermanni, P.; Studart, A.R.; Arrieta, A.F. Programmable Snapping Composites with Bio-Inspired Architecture. Bioinspir. Biomim. 2017, 12, 026012. [Google Scholar] [CrossRef]
- Le Ferrand, H.; Riley, K.S.; Arrieta, A.F. Plant-Inspired Multi-Stimuli and Multi-Temporal Morphing Composites. Bioinspir. Biomim. 2022, 17, 046002. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Hou, Y.; Zhong, S.; Zhu, J.; Guan, C. Biomimetic Venus Flytrap Structures Using Smart Composites: A Review. Materials 2023, 16, 6702. https://doi.org/10.3390/ma16206702
Wang B, Hou Y, Zhong S, Zhu J, Guan C. Biomimetic Venus Flytrap Structures Using Smart Composites: A Review. Materials. 2023; 16(20):6702. https://doi.org/10.3390/ma16206702
Chicago/Turabian StyleWang, Bing, Yi Hou, Shuncong Zhong, Juncheng Zhu, and Chenglong Guan. 2023. "Biomimetic Venus Flytrap Structures Using Smart Composites: A Review" Materials 16, no. 20: 6702. https://doi.org/10.3390/ma16206702
APA StyleWang, B., Hou, Y., Zhong, S., Zhu, J., & Guan, C. (2023). Biomimetic Venus Flytrap Structures Using Smart Composites: A Review. Materials, 16(20), 6702. https://doi.org/10.3390/ma16206702