
Fatigue-Crack Detection in a Multi-Riveted Strap-Joint Aluminium Aircraft Panel Using Amplitude Characteristics of Diffuse Lamb Wave Field
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Arrangements
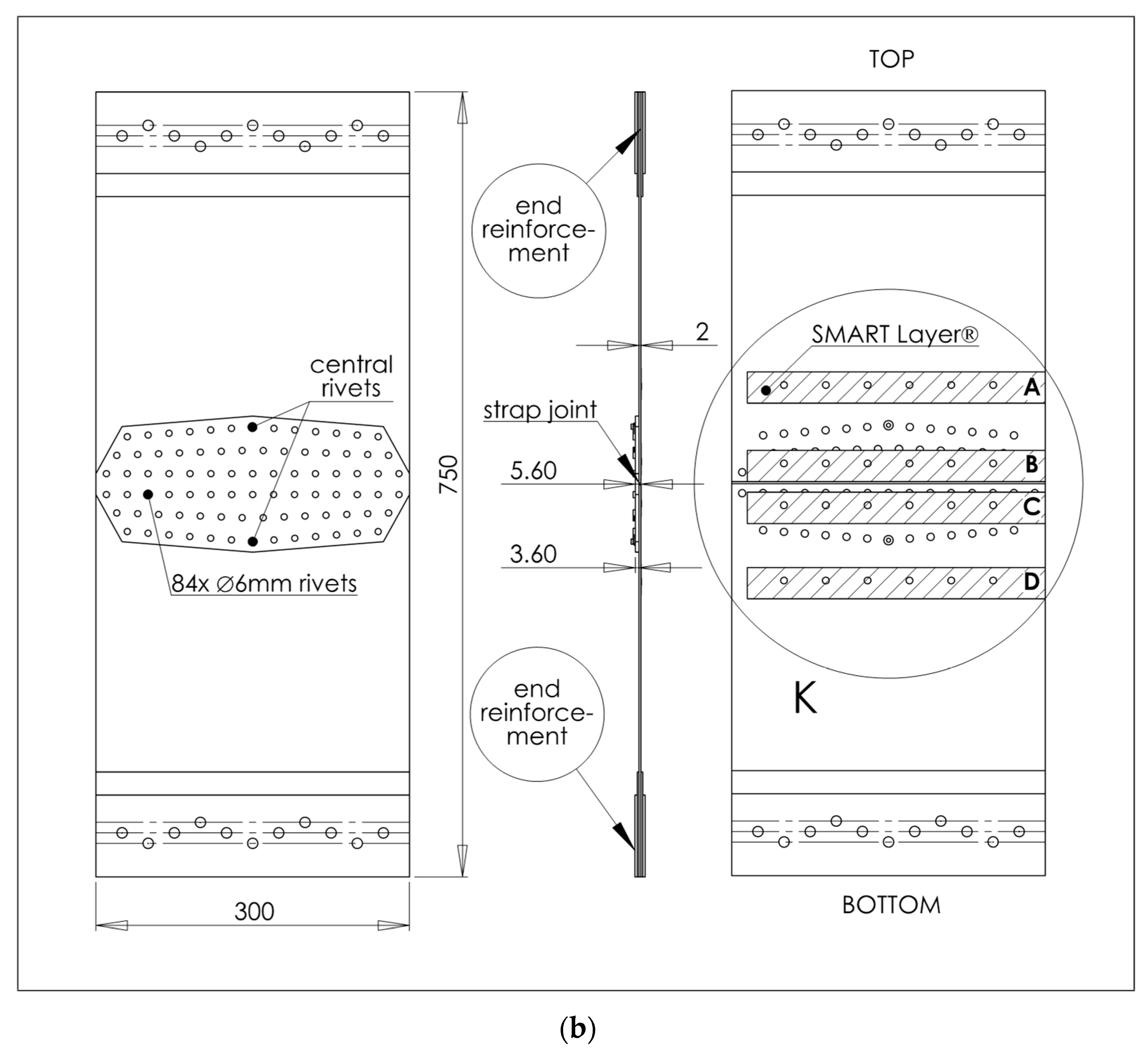
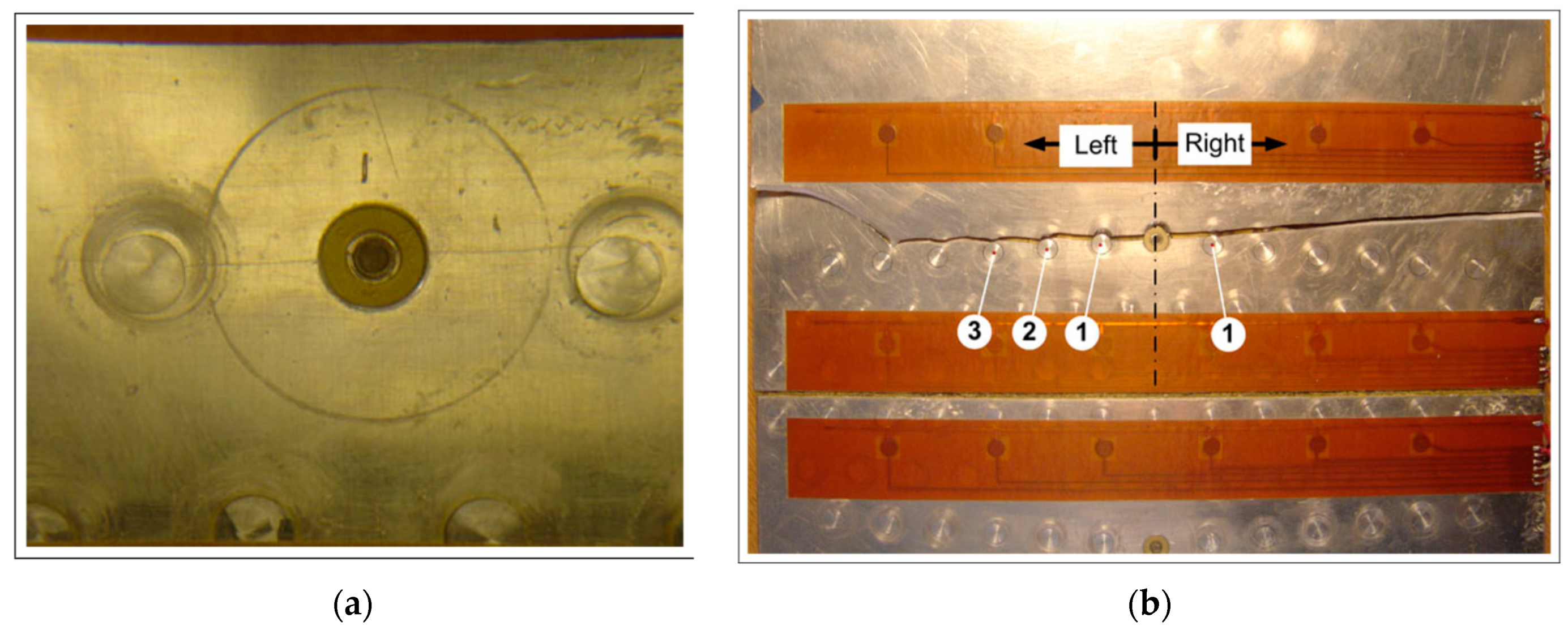
2.1. Multi-Riveted Strap Joint Aluminium Panel
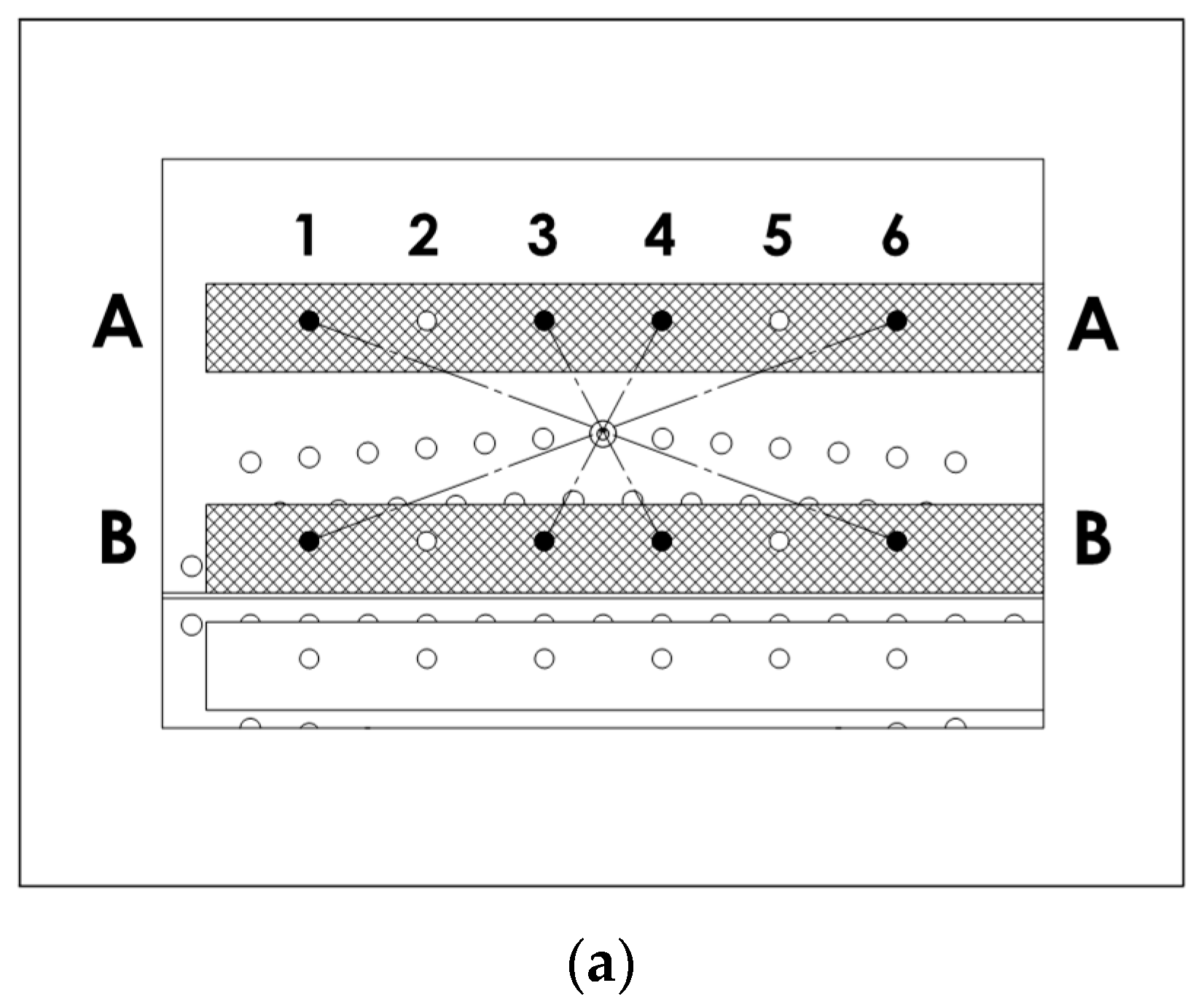
2.2. Sensor and Measurement Arrangements
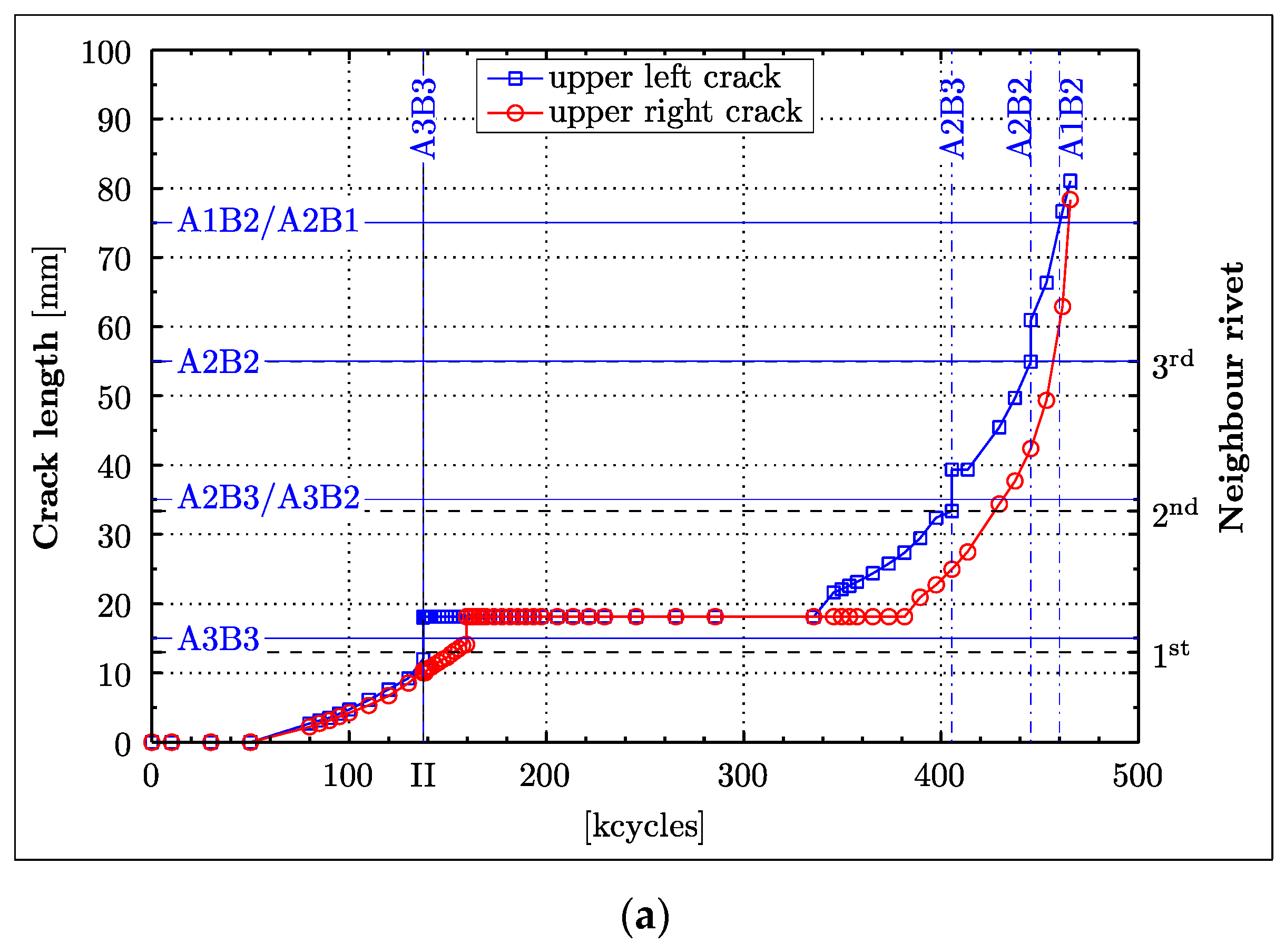
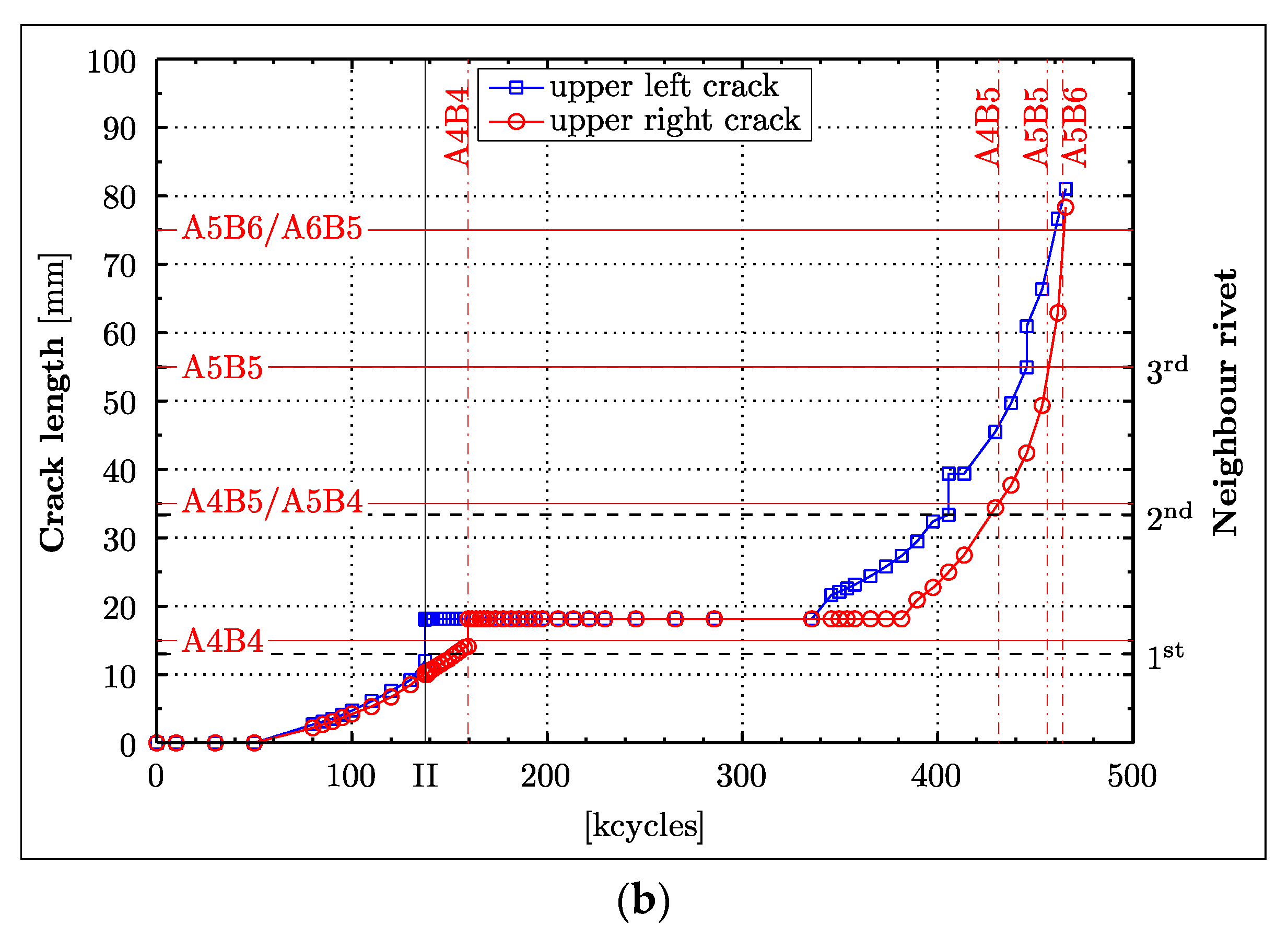
2.3. Fatigue Tests and Crack Propagation
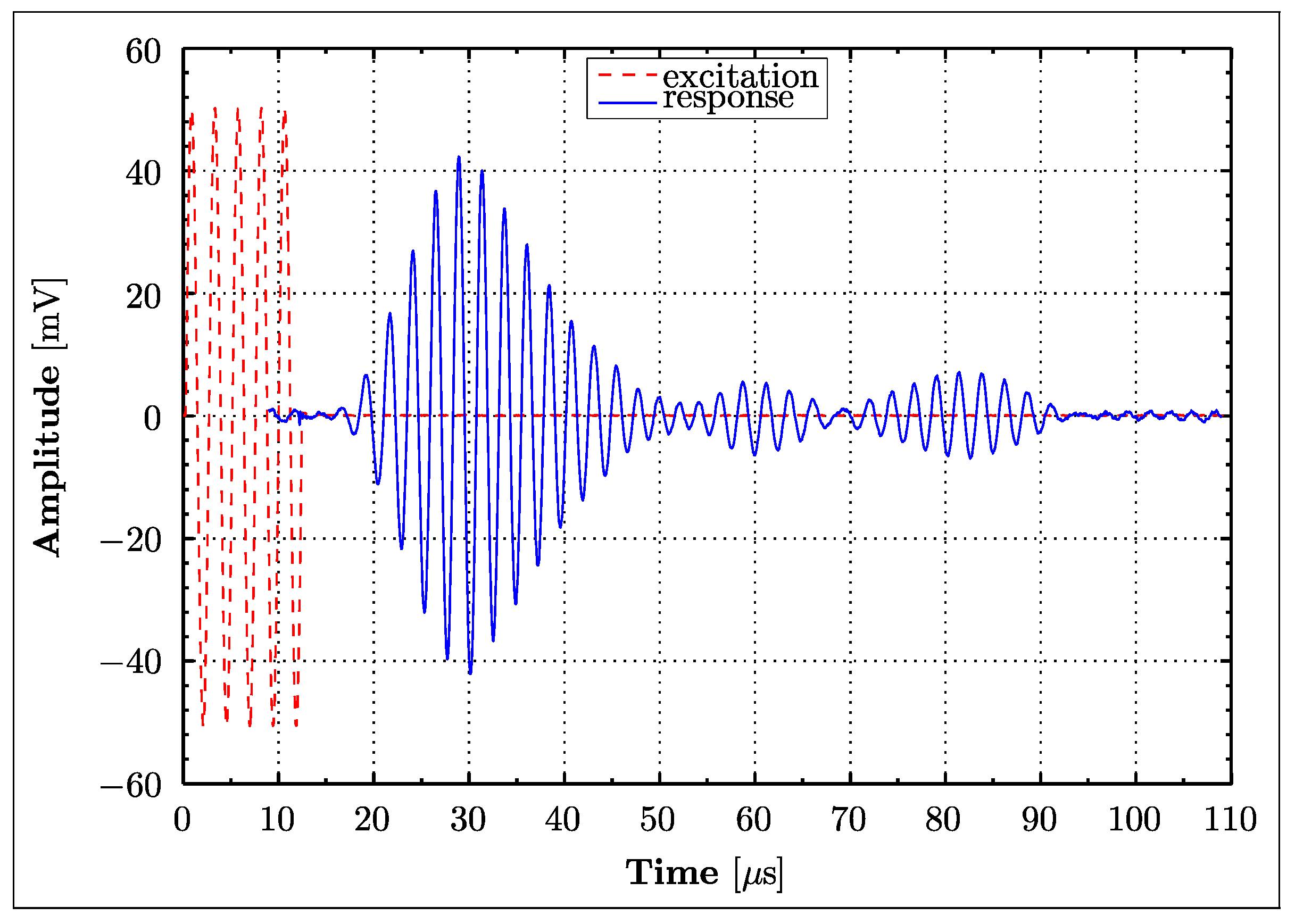
2.4. Lamb Wave Generation and Sensing
3. Signal Features Used for Damage Detection
4. Damage Detection Results
4.1. Noise Level Estimation
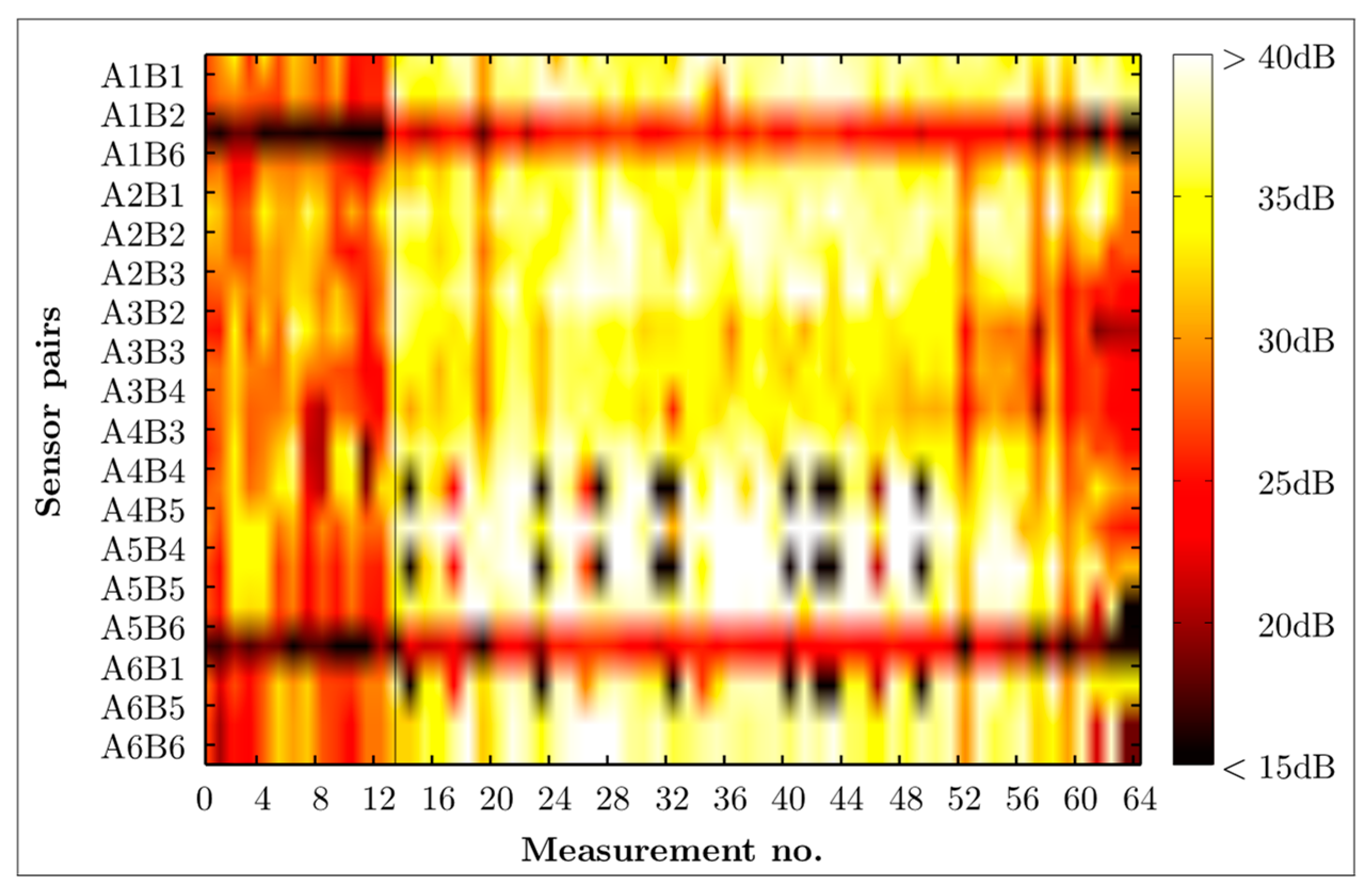
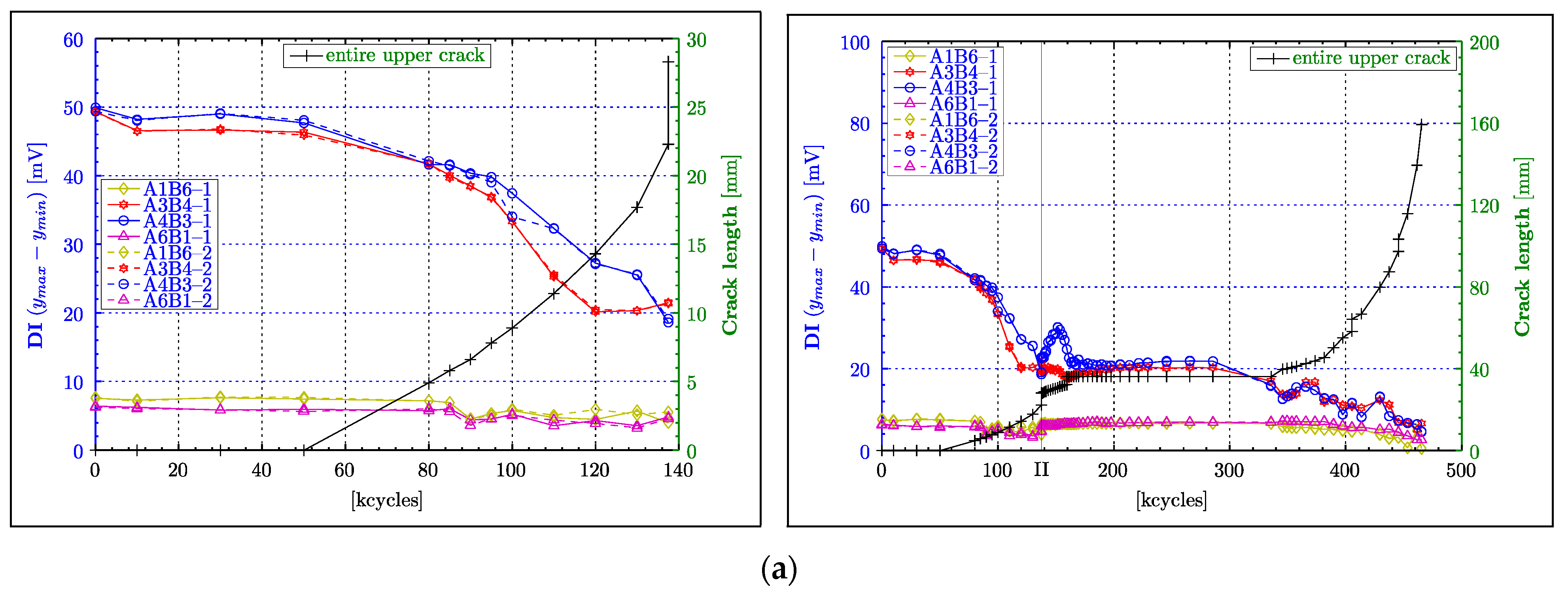
4.2. Peak-to-Peak Amplitude
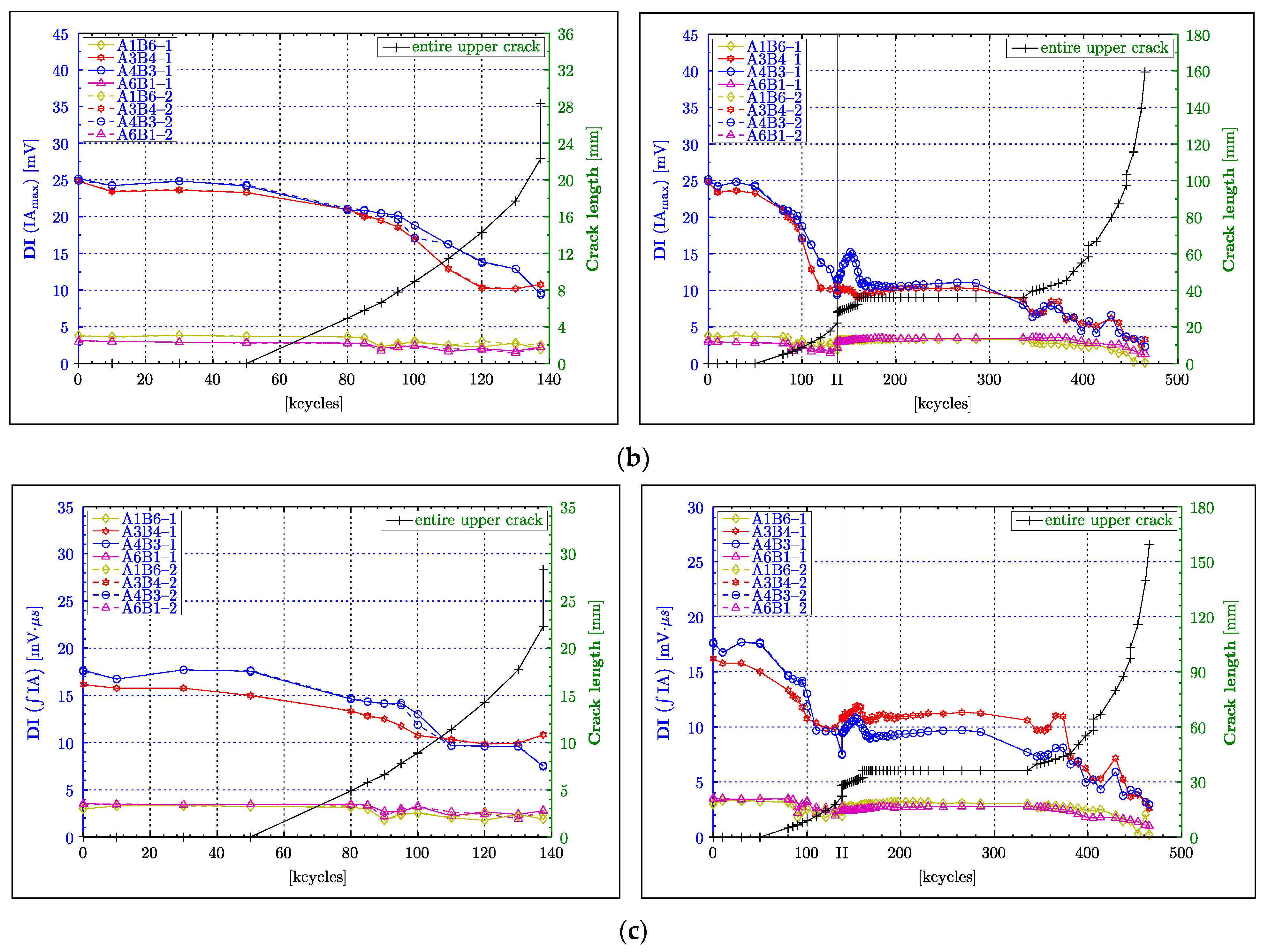
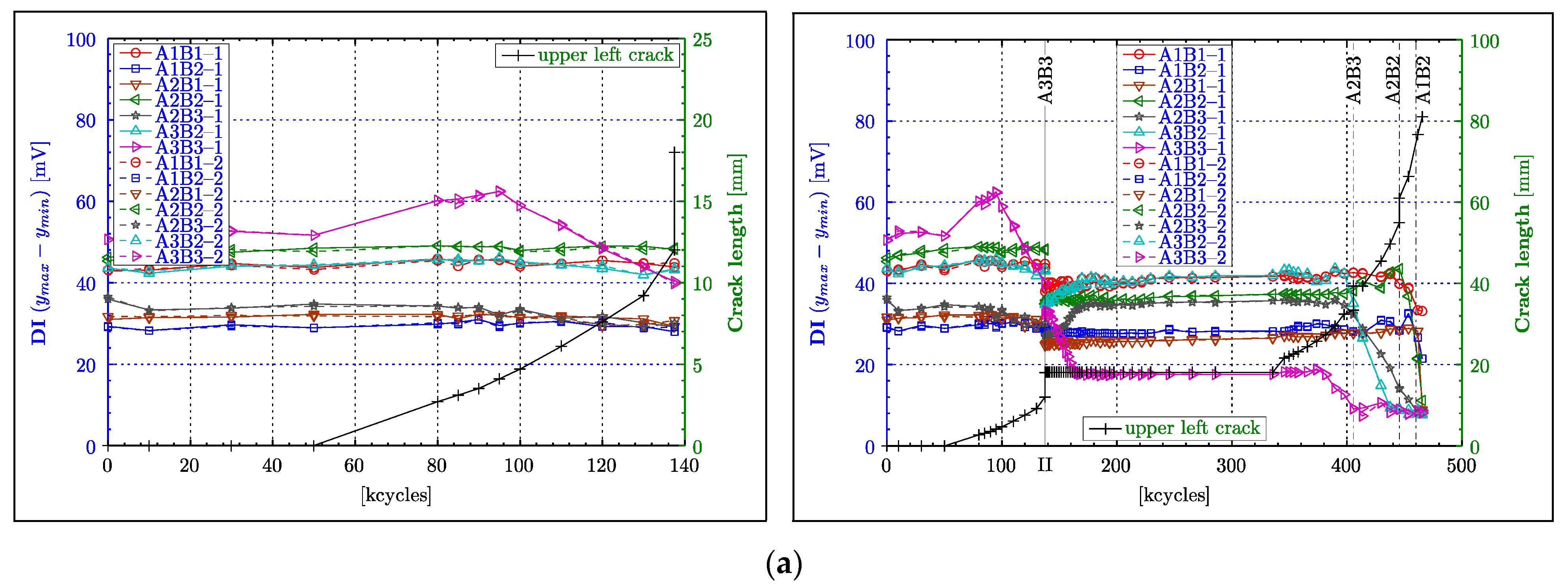
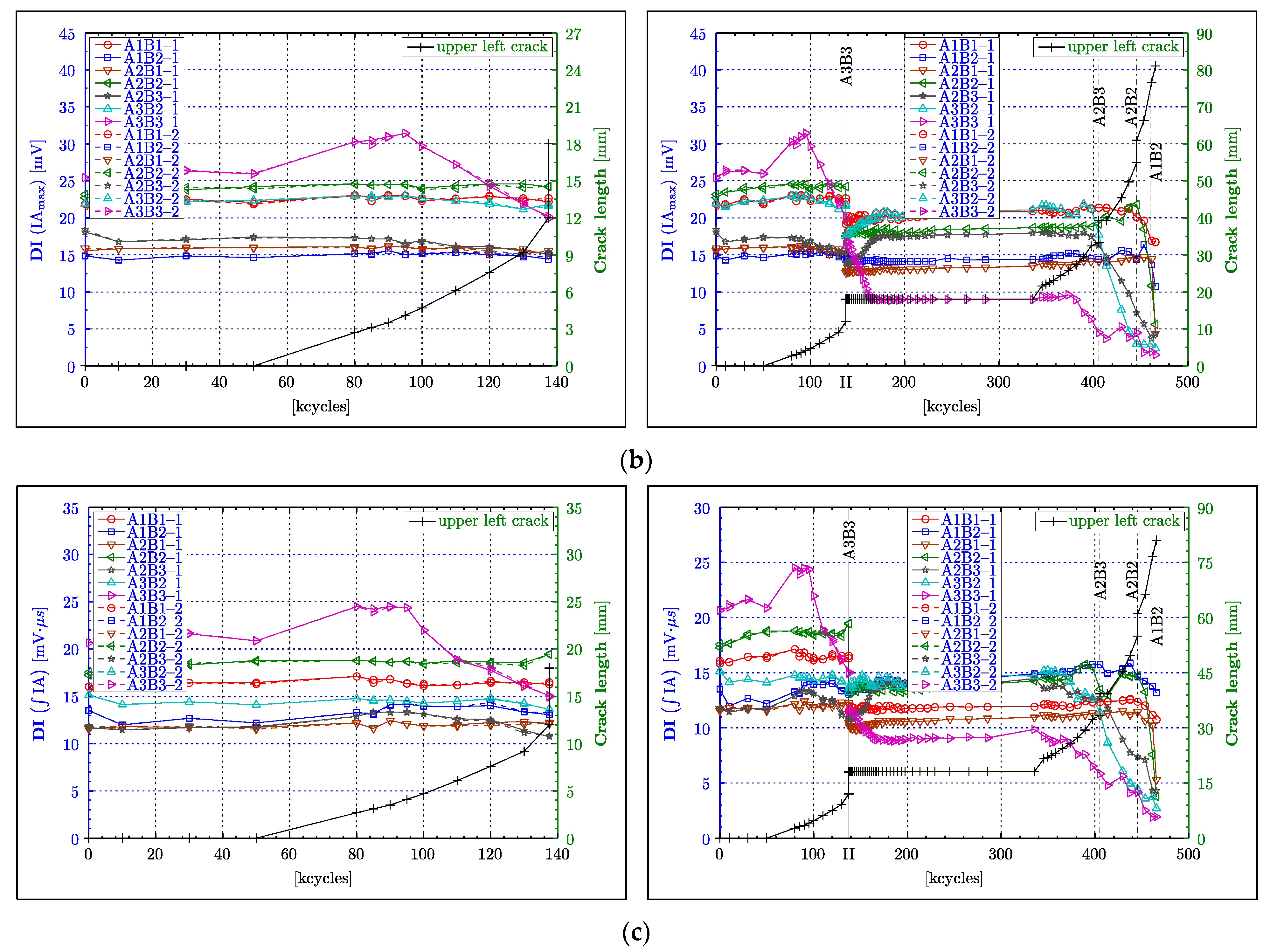
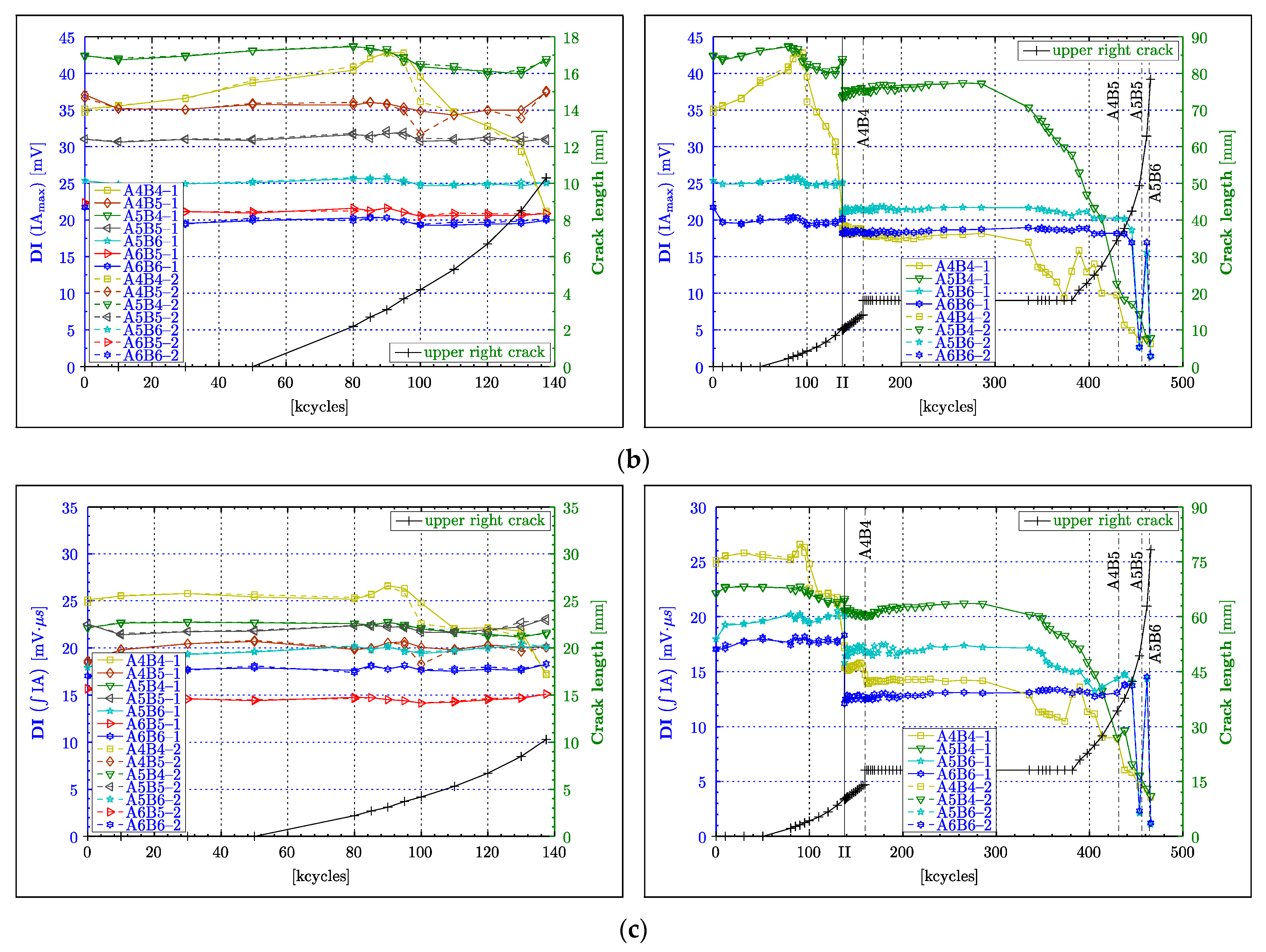
4.3. Instantaneous Amplitude
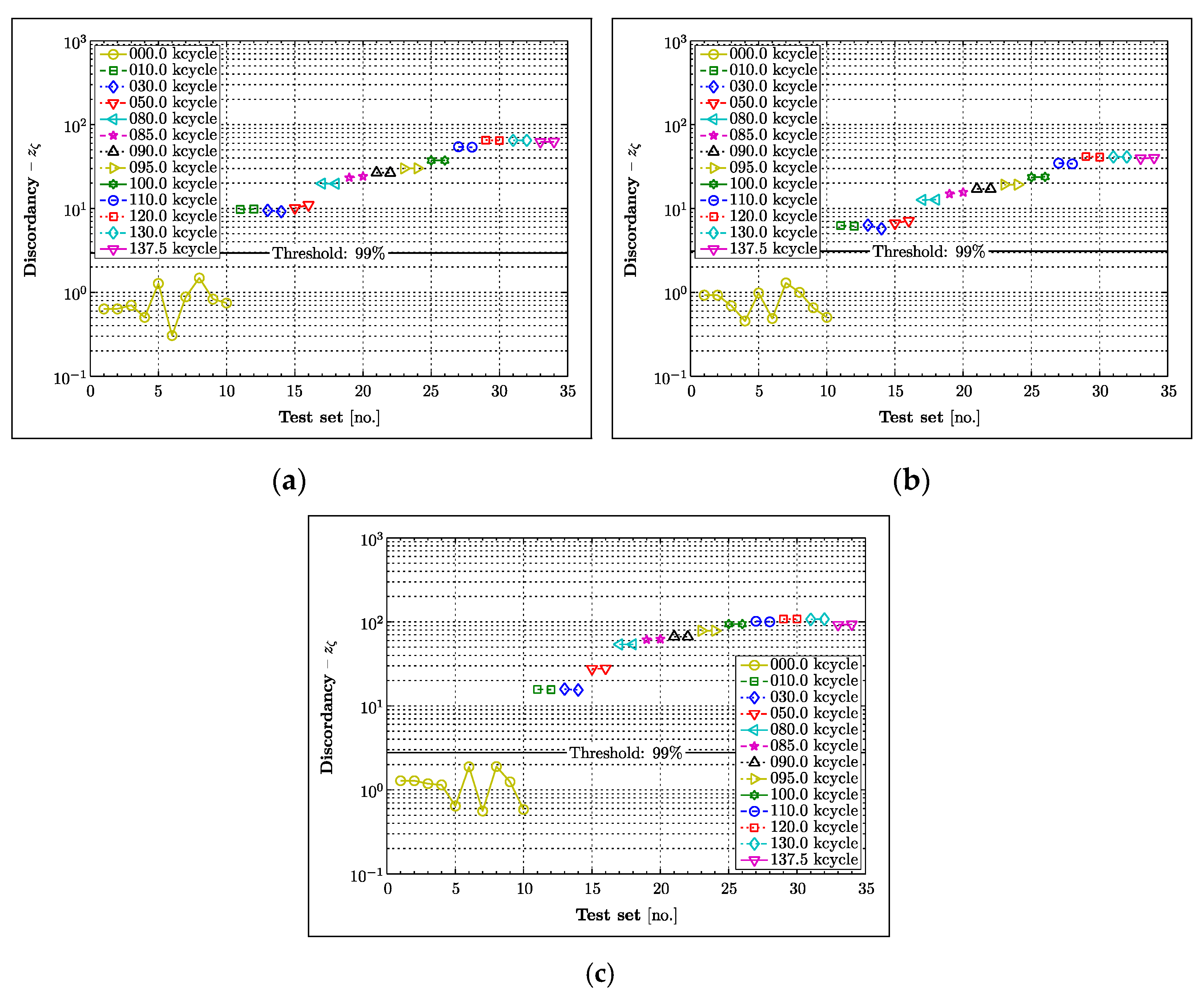
4.4. Novelty Detection
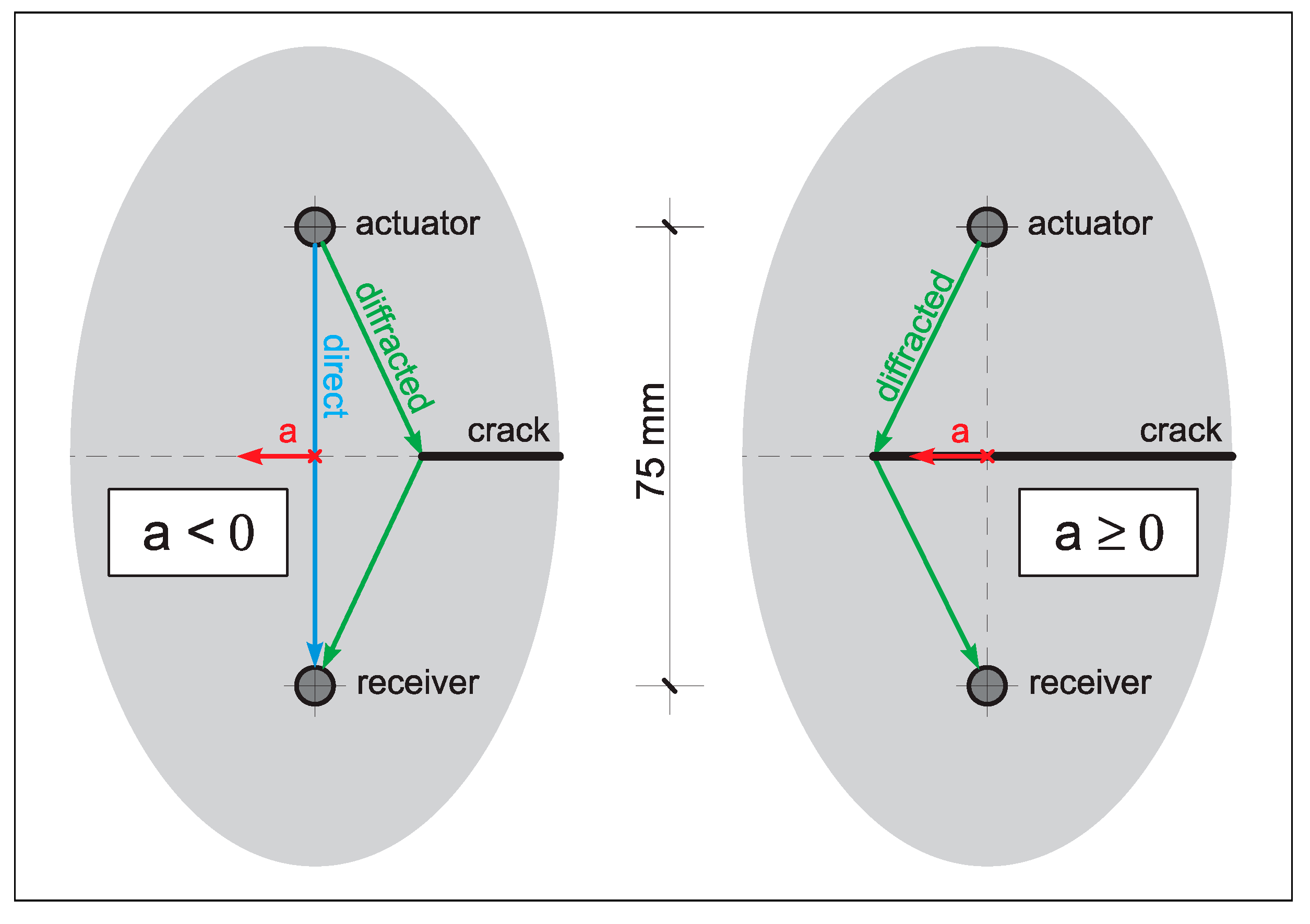
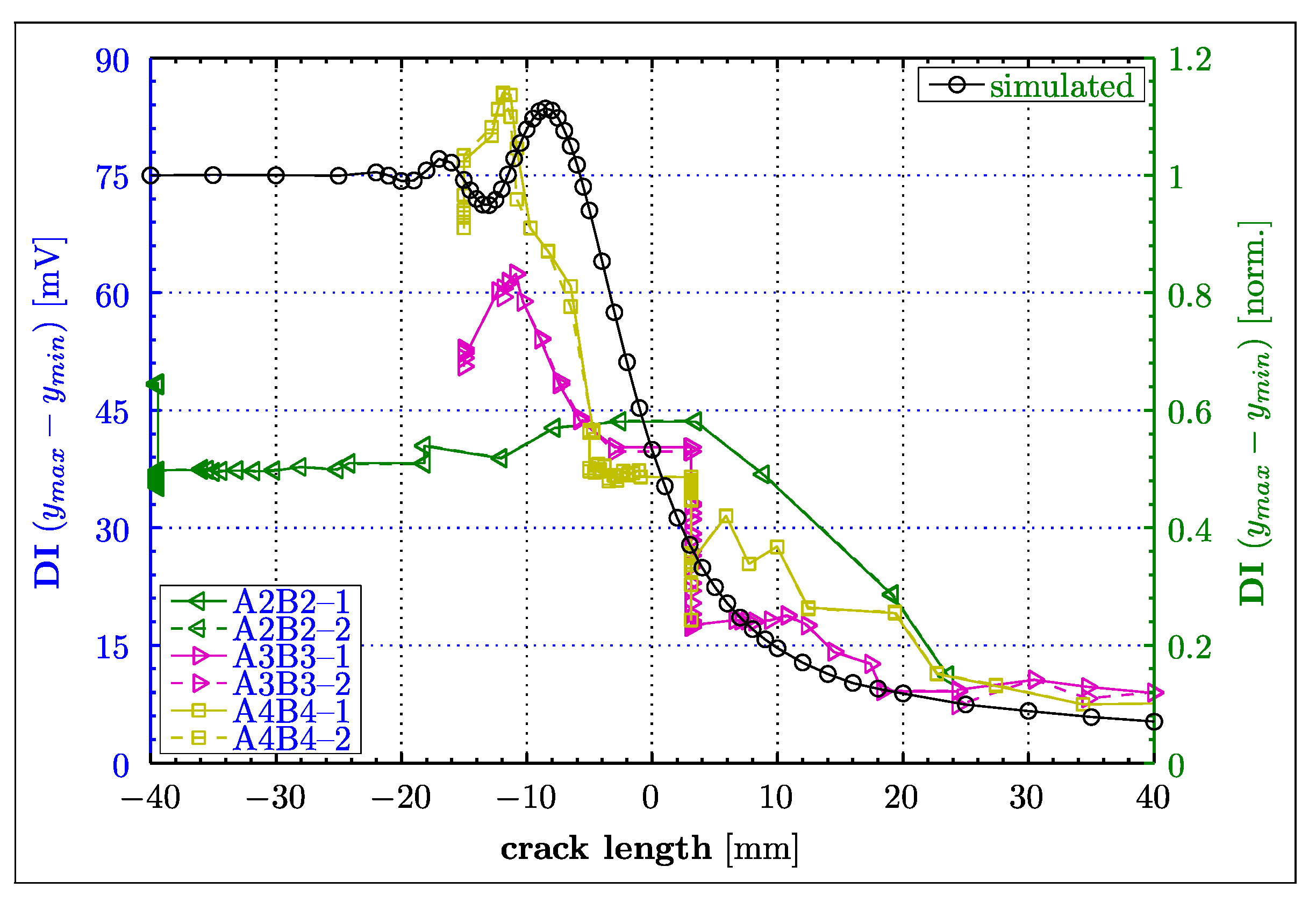
5. Simulation of Wave Diffraction from a Crack Tip
6. Discussion and Further Comments
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Staszewski, W.J.; Boller, C.; Tomlinson, G.R. (Eds.) Health Monitoring of Aerospace Structures; Wiley: Chichester, UK, 2004. [Google Scholar]
- Adams, D. Health Monitoring of Structural Materials and Components: Methods and Applications; Wiley: Chichester, UK, 2007. [Google Scholar]
- Boller, C.; Chang, F.K.; Fujino, Y. (Eds.) Encyclopedia of Structural Health Monitoring; Wiley: Chichester, UK, 2009. [Google Scholar]
- Su, Z.; Ye, L. Identification of Damage Using Lamb Waves: From Fundamentals to Applications; Springer: Berlin, Germany, 2009. [Google Scholar]
- Stepinski, T.; Uhl, T.; Staszewski, W.J. (Eds.) Advanced Structural Damage Detection: From Theory to Engineering Applications; Wiley: Chichester, UK, 2013. [Google Scholar]
- Chang, F.K. Smart Layer: Built-In Diagnostic System for Composite Structures. In Proceedings of the Fourth European Conference on Smart Structures and Materials with the Second International Conference on Micromechanics, Intelligent Materials and Robotics, Harrogate, UK, 6–8 July 1998; pp. 777–786. [Google Scholar]
- Giurgiutiu, V.; Zagrai, A.; Bao, J.J. Piezoelectric Wafer Embedded Active Sensors for Aging Aircraft Structural Health Monitoring. Struct. Health Monit. 2002, 1, 41–61. [Google Scholar] [CrossRef]
- Staszewski, W.J. Structural Health Monitoring Using Guided Ultrasonic Waves. In Advances in Smart Technologies in Structural Engineering; Holnicki-Szulc, J., Mota Soares, C.A., Eds.; Springer: Berlin, Germany, 2004; pp. 117–162. [Google Scholar]
- Croxford, A.J.; Wilcox, P.; Drinkwater, B.W.; Konstantinidis, G. Strategies for guided-wave structural health monitoring. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 2961–2981. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C. Review of guided-wave structural health monitoring. Shock. Vib. Digest. 2007, 39, 91–114. [Google Scholar] [CrossRef]
- Ramalho, G.M.F.; Lopes, A.M.; da Silva, L.F.M. Structural health monitoring of adhesive joints using Lamb waves: A review. Struct. Control Health Monit. 2022, 29, e2849. [Google Scholar] [CrossRef]
- Rose, J.L.; Ditri, J.J. Pilse-echo and through transmission Lamb wave techniques for adhesive bond inspection. Br. J. Non Destr. Test. 1992, 34, 591–594. [Google Scholar]
- Rose, J.L.; Rajana, K.M.; Hansch, M.K.T. Ultrasonic guided waves for NDE of adhesively bonded structures. J. Adhesions. 1995, 50, 71–82. [Google Scholar] [CrossRef]
- Lowe, M.J.S.; Challis, R.E.; Chan, C.W. The transmission of Lamb waves across adhesively bonded lap joints. J. Acoust. Soc. Am. 2000, 107, 1333–1345. [Google Scholar] [CrossRef]
- Kostson, E.; Fromme, P. Defect Detection in Multi-Layered Structures Using Guided Ultrasonic Waves. In AIP Conference Proceedings; Thompson, D.O., Chimenti, D.E., Eds.; American Institute of Physics: College Park, MD, USA, 2009; Volume 1096, pp. 209–216. [Google Scholar]
- Lindgren, E.; Aldrin, J.C.; Jata, K.; Scholes, B.; Knopp, J. Ultrasonic Plate Waves for Fatigue Crack Detection in Multi-Layered Metallic Structures. In Proceedings of the 14th International Symposium on Smart Structures and Materials & Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 19–22 March 2007; International Society for Optics and Photonics: Bellingham, WA, USA, 2007; Volume 6532, p. 53207. [Google Scholar]
- Lissenden, C.J.; Cho, H.; Kim, C.S. Fatigue Crack Growth Monitoring of an Aluminum Joint Structure. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2010; Volume 1211, pp. 1868–1875. [Google Scholar]
- Bar-Cohen, Y.; Mal, A.K.; Yin, C.C. Ultrasonic Evaluation of Adhesive Bonding. J. Adhes. 1989, 29, 257–274. [Google Scholar] [CrossRef]
- De, S.; Gupta, K.; Stanley, R.J.; Zoughi, R.; Doering, K.; Van Aken, D.; Steffes, G.; O’Keefe, M.; Palmer, D. A Comprehensive Structural Analysis Process for Failure Assessment in Aircraft Lap-Joint Mimics Using Intramodal Fusion of Eddy Current Data. Res. Nondestruct. Eval. 2012, 23, 146–170. [Google Scholar] [CrossRef]
- Uchanin, V. Detection of the Fatigue Cracks Initiated near the Rivet Holes by Eddy Current Inspection Techniques. Trans. Aerosp. Res. 2020, 2020, 47–58. [Google Scholar] [CrossRef]
- Cranch, G.A.; Johnson, L.; Algren, M.; Heerschap, S.; Miller, G.A.; Marunda, T.S.; Holtz, R.L. Crack detection in riveted lap joints using fiber laser acoustic emission sensors. Opt. Express 2017, 25, 19457–19467. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Peng, Z.; Wang, Z.; Xu, M. Acoustic emission detection of fatigue damage of aircraft riveted panel. Nondestruct. Test. 2020, 42, 12–14. [Google Scholar]
- Sieber, L.; Urbanek, R.; Bär, J. Crack-Detection in old riveted steel bridge structures. Procedia Struct. Integr. 2019, 17, 339–346. [Google Scholar] [CrossRef]
- Stamm, M.; Krüger, P.; Pfeiffer, H.; Köhler, B.; Reynaert, J.; Wevers, M. In-Plane Heatwave Thermography as Digital Inspection Technique for Fasteners in Aircraft Fuselage Panels. Appl. Sci. 2020, 11, 132. [Google Scholar] [CrossRef]
- Stamm, M.; Schlemme-Weber, S.; Appl, S.; Koser, J.; Pfeiffer, H. Fast loose rivet detection by using scanning laser Doppler vibrometry. J. Nondestruct. Test. 2021, 3, 2843–2853. [Google Scholar]
- Kopeć, M.; Grzywna, P.; Kukla, D.; Kowalewski, Z. Evaluation of the fatigue damage development using ESPI method. In Proceedings of the XXI Physical Metallurgy and Materials Science Conference, Rawa Mazowiecka, Poland, 5–8 June 2016. [Google Scholar]
- Zhu, J.J.; Qing, X.L.; Liu, Q.J.; Liu, X.; Wang, Y.S. Monitoring of fibre-reinforced composite single-lap joint with electromechanical impedance of piezoelectric transducer. Materials 2019, 12, 3241. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wheatley, G.; Barton, D.; Davey, K. On the Detection of Fatigue Damage Prior to Surface Indication. In Proceedings of the 10th International Conference on Fracture, Honolulu, HA, USA, 2–6 December 2001. [Google Scholar]
- Becht, P.; Deckers, E.; Claeys, C.; Pluymers, B.; Desmet, W. Loose bolt detection in a complex assembly using a vibro-acoustic sensor array. Mech. Syst. Signal Process. 2019, 130, 433–451. [Google Scholar] [CrossRef]
- Demetgul, M.; Senyurek, V.; Uyandik, R.; Tansel, I.; Yazicioglu, O. Evaluation of the health of riveted joints with active and passive structural health monitoring techniques. Measurements 2015, 69, 42–51. [Google Scholar] [CrossRef]
- Skorupa, A.; Skorupa, M. Riveted Lap Joints in Aircraft Fuselage: Design, Analysis and Properties; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Zhao, H.; Xi, J.; Zheng, K.; Shi, Z.; Lin, J.; Nikbin, K.; Duan, S.; Wang, B. A review on solid riveting techniques in aircraft assembling. Manuf. Rev. 2020, 7, 40. [Google Scholar] [CrossRef]
- Grondel, S.; Delebarre, C.; Assaad, J.; Dupuis, J.-P.; Reithler, L. Fatigue crack monitoring of riveted aluminium strap joints by Lamb wave analysis and acoustic emission measurement techniques. NDT E Int. 2002, 35, 137–146. [Google Scholar] [CrossRef]
- He, J.; Guan, X.; Peng, T.; Liu, Y.; Saxena, A.; Celaya, J.; Goebel, K. A multi-feature integration method for fatigue crack detection and crack length estimation in riveted lap joints using Lamb waves. Smart Mater. Struct. 2013, 22, 105007. [Google Scholar] [CrossRef]
- Ihn, J.B.; Chang, F.K. Detection and monitoring of hidden fatigue crack growth using a built-in piezoelectric sensor/actuator network: II Validation using riveted joints and repair patches. Smart Mater. Struct. 2004, 13, 621. [Google Scholar] [CrossRef]
- Ihn, J.B.; Chang, F.K. Pitch-catch active sensing methods in structural health monitoring. Struct. Health Monit. 2008, 7, 5–19. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Cuc, A. Embedded non-destructive evaluation for structural health monitoring, damage detection, and failure prevention. Shock. Vib. Dig. 2005, 37, 83–105. [Google Scholar] [CrossRef]
- Cerniglia, D.; Jhang, K.Y.; Djordjevic, B.B. Non-contact ultrasonic Test of aircraft lap joints. In Proceedings of the 15th World Congress on NDT, Rome, Italy, 15–21 October 2000. [Google Scholar]
- Wandowski, T.; Malinowski, P.; Ostachowicz, W. Guided Wave-Based Damage Localization in Riveted Aircraft Panel. In Proceedings of the Conference of Health Monitoring of Structural and Biological Systems, San Diego, CA, USA, 11–14 March 2013; SPIE: Bellingham, WA, USA; Volume 8695, p. 869119. [Google Scholar]
- Wojtczak, E.; Rucka, M. Wave frequency effects on damage imaging in adhesive joints using Lamb waves and RMS. Materials 2019, 12, 1842. [Google Scholar] [CrossRef] [Green Version]
- Zielinska, M.; Rucka, M. Imaging of increasing damage in steel plates using Lamb waves and ultrasound computed tomography. Materials 2021, 14, 5114. [Google Scholar] [CrossRef]
- Bhuiyan, M.Y.; Shen, Y.; Giurgiutiu, V. Guided wave based crack detection in the rivet hole using global analytical with local FEM approach. Materials 2016, 9, 602. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; He, J.; Zhang, W. Lamb Wave-Based Structural Health Monitoring for Aircraft Riveted Lap joint. In Proceedings of the 2015 Prognostics and System Health Management Conference, Beijing, China, 21–23 October 2015. [Google Scholar]
- Sbarufatti, C.; Manes, A.; Giglio, M. Application of sensor technologies for local and distributed structural health monitoring. Struct. Control Health Monit. 2013, 21, 1057–1083. [Google Scholar] [CrossRef]
- Alem, B.; Abedian, A. A semi-baseline damage identification approach for complex structures using energy ratio correction technique. Struct. Control Health Monit. 2018, 25, e2103. [Google Scholar] [CrossRef]
- Ochôa, P.; Groves, R.M.; Benedictus, R. Systematic multiparameter design methodology for an ultrasonic health monitoring system for full-scale composite aircraft primary structures. Struct. Control Health Monit. 2019, 26, e2340. [Google Scholar] [CrossRef] [Green Version]
- Michaels, J.E.; Michaels, T.E. Detection of structural damage from the local temporal coherence of diffuse ultrasonic signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 1769–1782. [Google Scholar] [CrossRef] [PubMed]
- Worden, K.; Staszewski, W.J.; Hensman, J.J. Natural computing for mechanical systems research: A tutorial overview. Mech. Syst. Signal Process. 2011, 25, 4–111. [Google Scholar] [CrossRef]
- Staszewski, W. Monitoring on-line integrated technologies for operational reliability—Monitor. Air Space Eur. 2000, 2, 67–72. [Google Scholar] [CrossRef]
- Dworakowski, Z.; Ambrozinski, L.; Packo, P.; Dragan, K.; Stepinski, T. Application of artificial neural networks for compounding multiple damage indices in Lamb-wave-based damage detection. Struct. Control Health Monit. 2015, 22, 50–61. [Google Scholar] [CrossRef]
- Dworakowski, Z.; Dragan, K.; Stepinski, T. Artificial neural network ensembles for fatigue damage detection in aircraft. J. Intell. Mater. Syst. Struct. 2016, 28, 851–861. [Google Scholar] [CrossRef]
- Sbarufatti, C. Optimization of an artificial neural network for fatigue damage identification using analysis of variance. Struct. Control Health Monit. 2016, 24, e1964. [Google Scholar] [CrossRef]
- Dao, P.B.; Staszewski, W.J. Lamb wave based structural damage detection using stationarity tests. Materials 2021, 14, 6823. [Google Scholar] [CrossRef]
- Ambardar, A. Analog and Digital Signal Processing, 2nd ed.; Brooks/Coles: Monterey, CA, USA; Pacific Grove: London, UK, 1999. [Google Scholar]
- Bershad, N.; Rockmore, A. On estimating signal-to-noise ratio using the sample correlation coefficient. IEEE Trans. Inf. Theory 1974, 20, 112–113. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G.; Fieller, N. Damage Detection Using Outlier Analysis. J. Sound Vib. 2000, 229, 647–667. [Google Scholar] [CrossRef]
- Lee, B.C.; Staszewski, W.J. Lamb wave propagation modelling for damage detection. Part I: Two-dimensional analysis. Smart Mater. Struct. 2007, 16, 249–259. [Google Scholar] [CrossRef]
- Lee, B.C.; Staszewski, W.J. Lamb wave propagation modelling for damage detection. Part II: Damage monitoring strategy. Smart Mater. Struct. 2007, 16, 260–274. [Google Scholar] [CrossRef]
- Wilcox, P. Lamb Wave Inspection of Large Structures Using Permanently Attached Transducers. Ph.D. Thesis, Department of Mechanical Engineering, Imperial College of Science, Technology and Medicine, London, UK, 1998. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stolze, F.H.G.; Worden, K.; Manson, G.; Staszewski, W.J. Fatigue-Crack Detection in a Multi-Riveted Strap-Joint Aluminium Aircraft Panel Using Amplitude Characteristics of Diffuse Lamb Wave Field. Materials 2023, 16, 1619. https://doi.org/10.3390/ma16041619
Stolze FHG, Worden K, Manson G, Staszewski WJ. Fatigue-Crack Detection in a Multi-Riveted Strap-Joint Aluminium Aircraft Panel Using Amplitude Characteristics of Diffuse Lamb Wave Field. Materials. 2023; 16(4):1619. https://doi.org/10.3390/ma16041619
Chicago/Turabian StyleStolze, Frank H. G., Keith Worden, Graeme Manson, and Wieslaw J. Staszewski. 2023. "Fatigue-Crack Detection in a Multi-Riveted Strap-Joint Aluminium Aircraft Panel Using Amplitude Characteristics of Diffuse Lamb Wave Field" Materials 16, no. 4: 1619. https://doi.org/10.3390/ma16041619