
Experimental and Numerical Calculation of the Friction Performance of a Concrete Surface

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
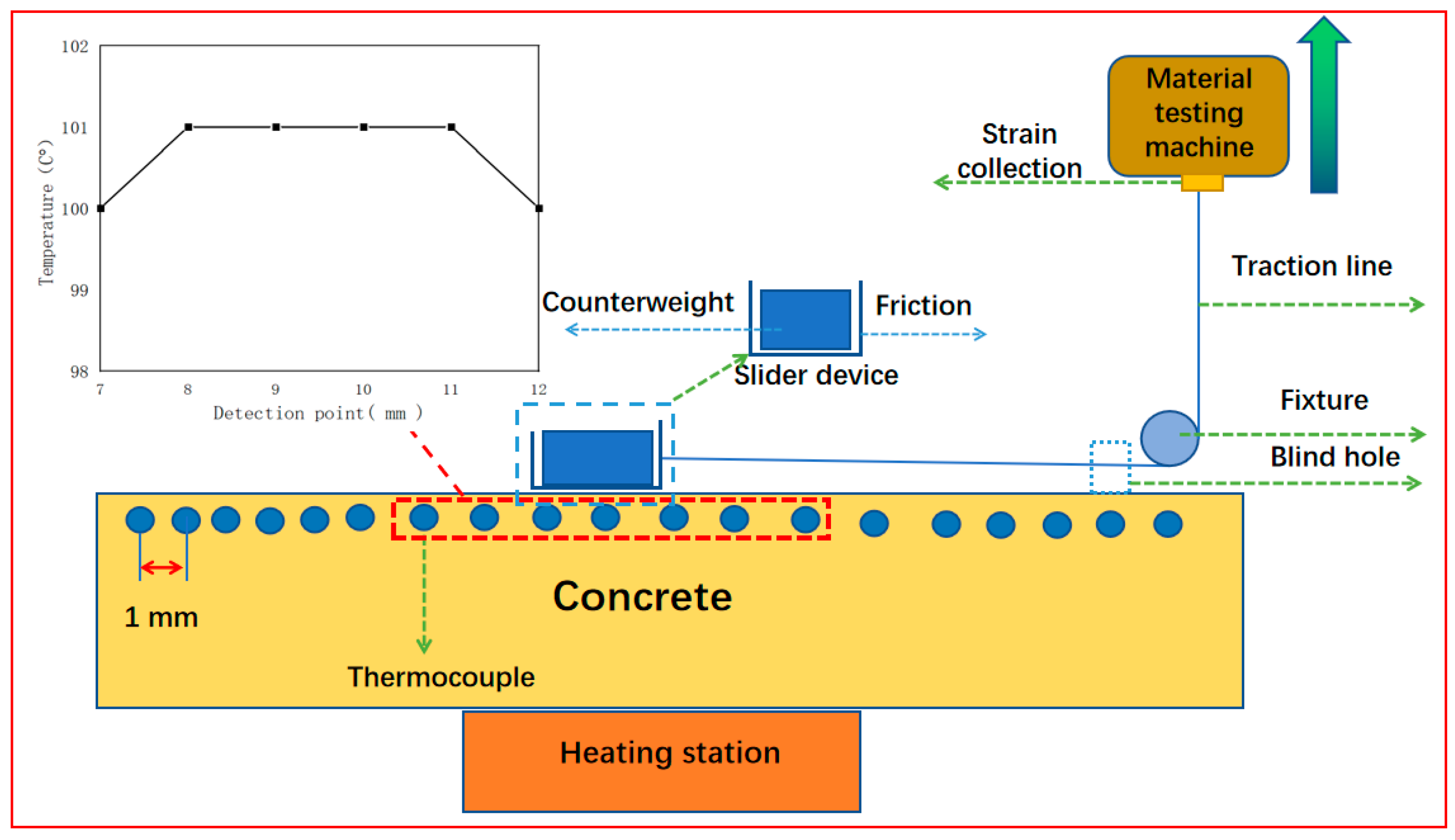
2. Testing Device and Stability Analysis
2.1. Testing Device
2.2. Stability Analysis
3. Experimental Tests
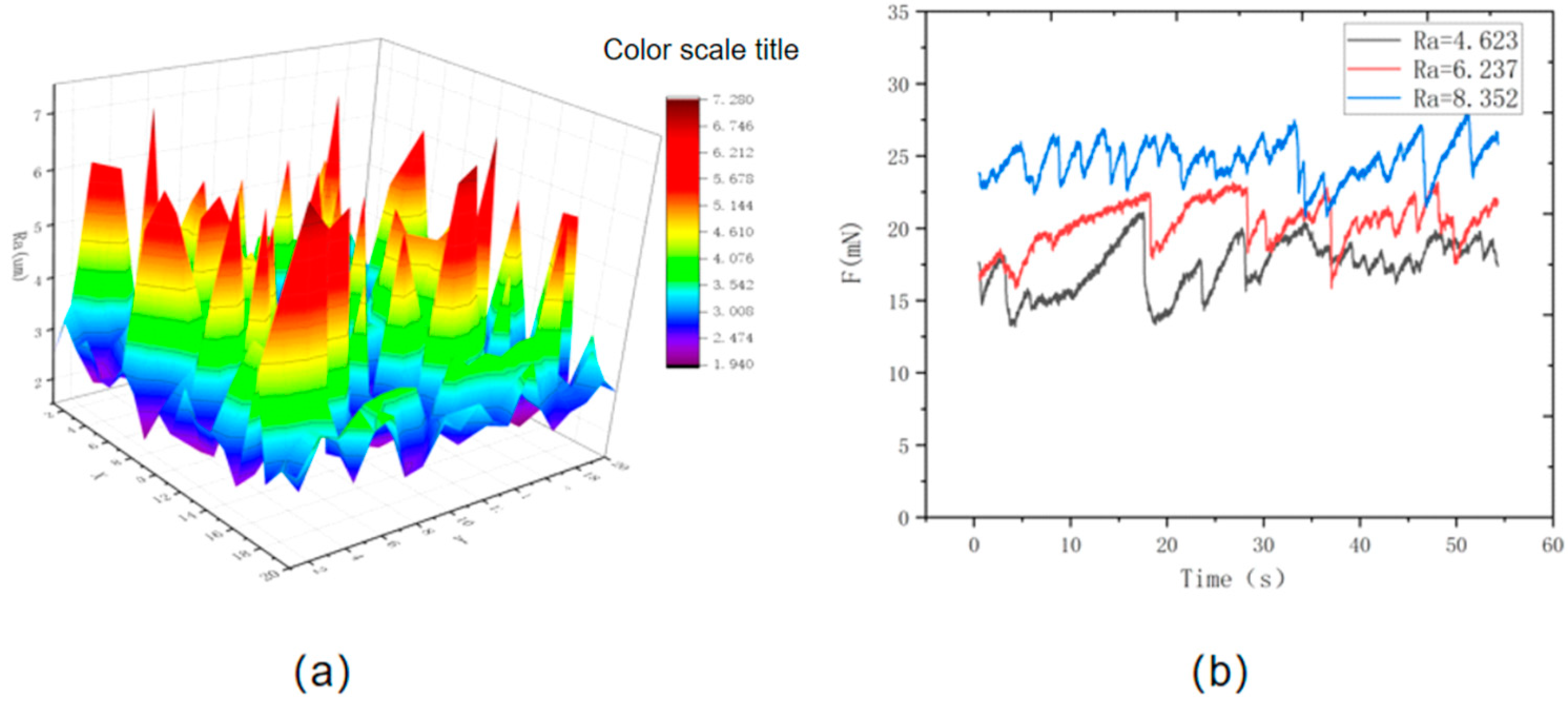
3.1. Influence of Material Surface Roughness
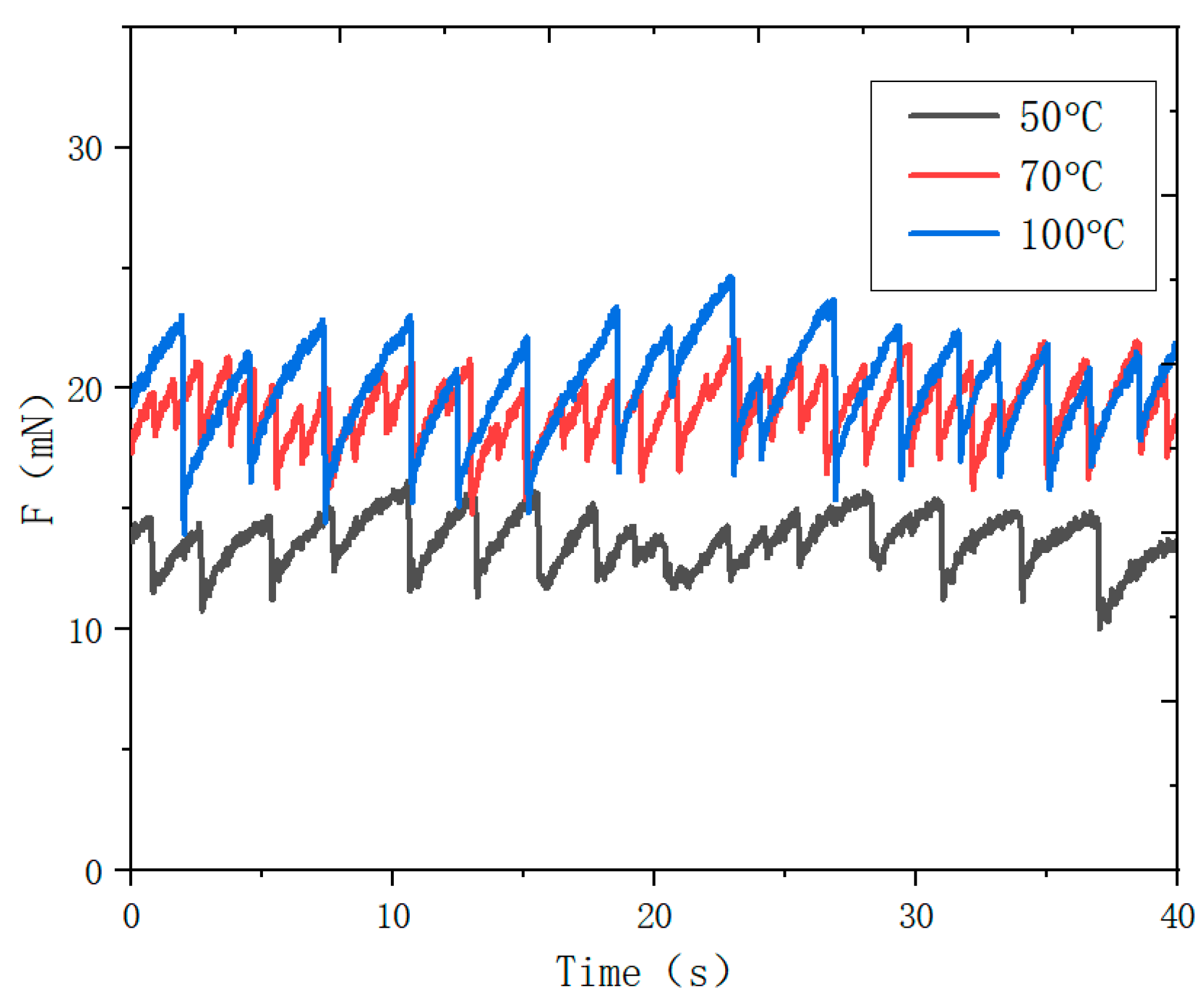
3.2. Influence of Temperature on Friction Properties of Concrete Materials
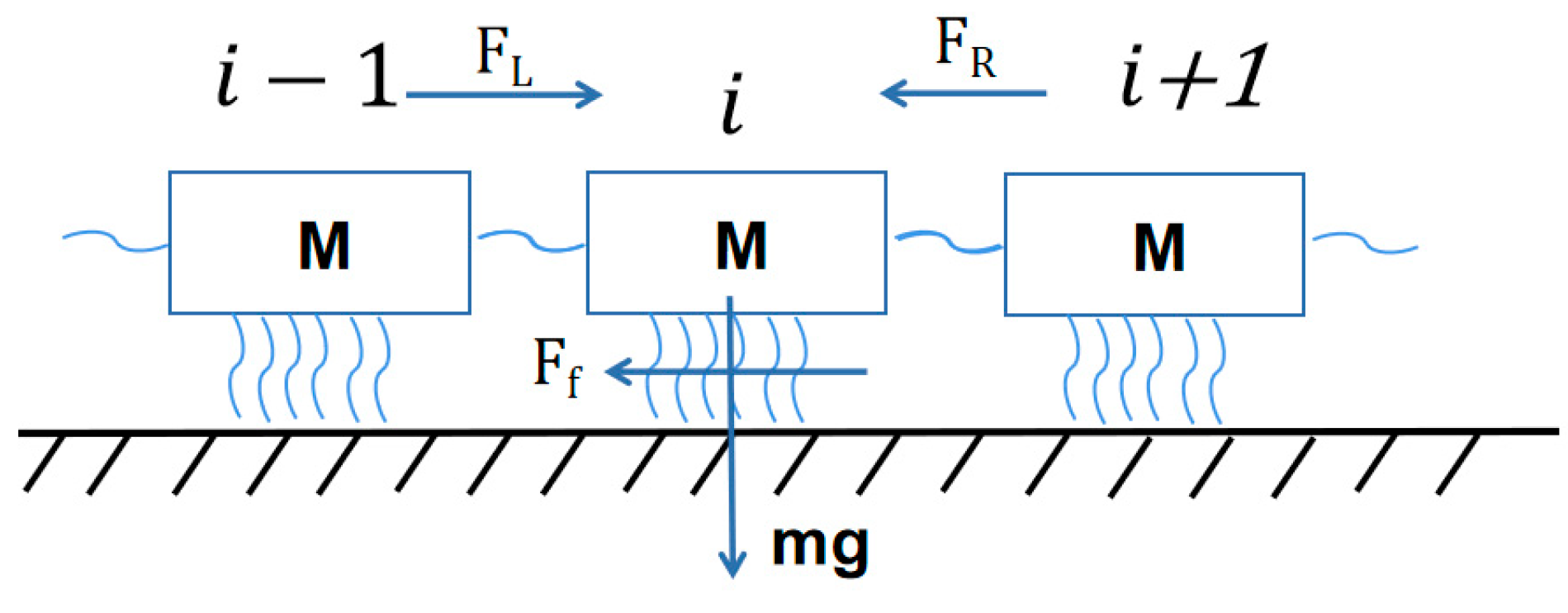
4. Numerical Calculation
4.1. Model Establishment and Calculation
4.2. Influence at Different Temperatures
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lokken; Edwin, C. Road noise, texture, and skid resistance. J. Acoust. Soc. Am. 1982, 71, S14. [Google Scholar] [CrossRef]
- Mclaughlin, M. Interaction of Vehicles and Pavements; TRansportation Research Board: Washington, DC, USA, 1983. [Google Scholar]
- Brunetto, M.B.; Carpinteri, A.; Chiaia, B. Contact, closure and friction behaviour of rough crack concrete surfaces. Fract. Mech. Concr. Struct. 1998, 3, 1635–1644. [Google Scholar]
- Fujita, Y.; Ishimaru, R.; Hanai, S.; Suenaga, Y. Study on internal friction angle and tensile strength of plain concrete. J. Struct. Constr. Eng. 1998, 62, 7–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ragueneau, F.; La Borderie, C.; Mazars, J. Damage model for concrete-like materials coupling cracking and friction, contribution towards structural damping: First uniaxial applications. Mech. Cohesive-Frict. Mater. 2000, 5, 607–625. [Google Scholar] [CrossRef]
- Ke, W.H.; Chen, S.F.; Li, Z.Z. Anti-sliding performance of pavement under wet condition. J. Wuhan Univ. Technol. 2013. [Google Scholar] [CrossRef]
- Huang, X.; Zheng, B. Research Status and Progress for Skid Resistance Performance of Asphalt Pavements. China J. Highw. Transp. 2019, 34, 32–49. [Google Scholar]
- Grosch, K.A. The Relation between the Friction and Visco-Elastic Properties of Rubber. Proc. R. Soc. Lond. 1963, 274, 21–39. [Google Scholar]
- Adam, C.S.; Piotrowski, M. Use of the unified theory of rubber friction for slip-resistance analysis in the testing of footwear outsoles and outsole compounds. Footwear Sci. 2012, 4, 23–35. [Google Scholar] [CrossRef]
- Lorenz, B.; Pyckhout-Hintzen, W.; Persson, B.N.J. Master curve of viscoelastic solid: Using causality to determine the optimal shifting procedure, and to test the accuracy of measured data. Polymer 2014, 55, 565–571. [Google Scholar] [CrossRef]
- Scaraggi, M.; Persson, B.N.J. Rolling Friction: Comparison of Analytical Theory with Exact Numerical Results. Tribol. Lett. 2014, 55, 15–21. [Google Scholar] [CrossRef]
- Hertz, H. On the contact of elastic solids. J. Rne. Angew. Math 1881, 92, 156–171. [Google Scholar]
- Persson, B.N. On the dependency of friction on load: Theory and experiment. Europhys. Lett. 2016, 13, 56002. [Google Scholar]
- Ciavarella, M. A Simplified Version of Persson’s Multiscale Theory for Rubber Friction Due to Viscoelastic Losses. J. Tribol. 2018, 140, 011403. [Google Scholar] [CrossRef] [Green Version]
- Guo, K. UniTire: Unified Tire Model UniTire. J. Mech. Eng. 2016, 52, 90–99. (In Chinese) [Google Scholar] [CrossRef]
- Yang, J.; Wang, H.; Wu, Q. Numerical simulations on skid resistance property of wet asphalt pavement. J. Chang. Univ. (Nat. Sci. Ed.) 2016, 36, 25–32. (In Chinese) [Google Scholar]
- La, S. Study on Low Temperature Friction Properties of Superconducting Materials. Ph.D. Thesis, Lanzhou University, Lanzhou, China, 2019. [Google Scholar]
- La, S.; Wang, J.; Zhang, X.; Zhou, Y. Frictional behavior of a micro-sized superconducting fiber in a low-temperature medium: Experimental and computational analysis. Acta Mech. Solida Sin. 2018, 31, 405–415. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, T.; Guo, Y. Friction and wear behaviors of CopperDisc/carbon pin in pantograph-catenary system with electric current. Mater. Prot. 2019, 52, 63–67, 76. [Google Scholar]
- La, S.; Liu, C.; Zhang, X. The mechanism of stick-slip phenomenon during friction process at low temperature environment. AIP Adv. 2019, 9, 065019. [Google Scholar] [CrossRef] [Green Version]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
La, S.; Wang, C. Experimental and Numerical Calculation of the Friction Performance of a Concrete Surface. Materials 2023, 16, 2989. https://doi.org/10.3390/ma16082989
La S, Wang C. Experimental and Numerical Calculation of the Friction Performance of a Concrete Surface. Materials. 2023; 16(8):2989. https://doi.org/10.3390/ma16082989
Chicago/Turabian StyleLa, Shiren, and Chong Wang. 2023. "Experimental and Numerical Calculation of the Friction Performance of a Concrete Surface" Materials 16, no. 8: 2989. https://doi.org/10.3390/ma16082989