


Use of Cohesive Approaches for Modelling Critical States in Fibre-Reinforced Structural Materials


Abstract
1. Introduction
2. Materials and Methods
- Forged steel;
- Ceramics with fibres;
- Cementitious composites.
2.1. Forged Steel
2.2. Ceramics with Fibres
2.3. Cementitious Composites
2.4. Numerical Adjustment
2.5. Computational Algorithms and Their Convergence Properties
3. Results and Discussion
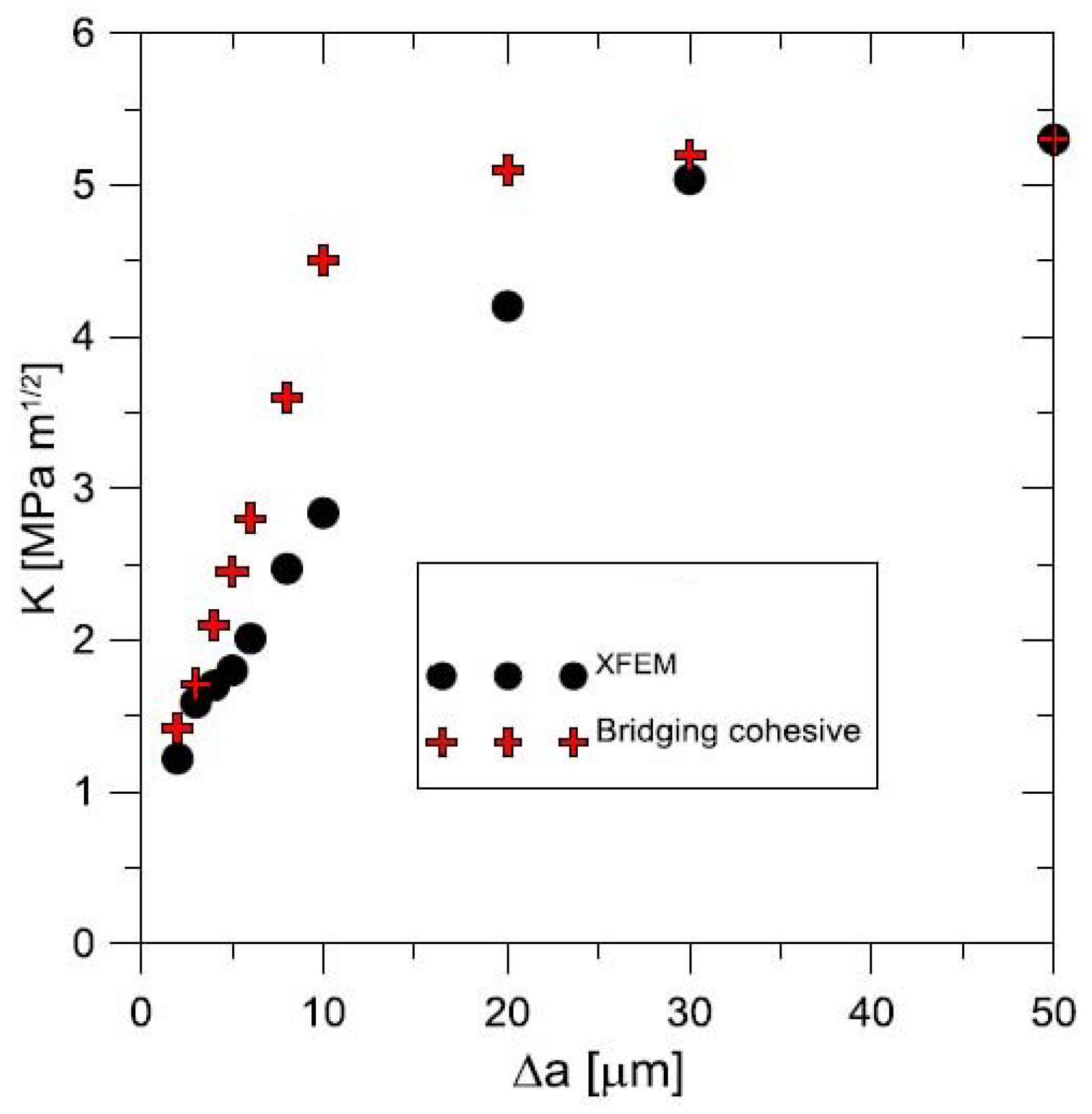
- Fibre bridging in crack growth realises an increase in fracture toughness associated with an increased level of strength in ceramics, similar to the interaction of grains in ductile materials.
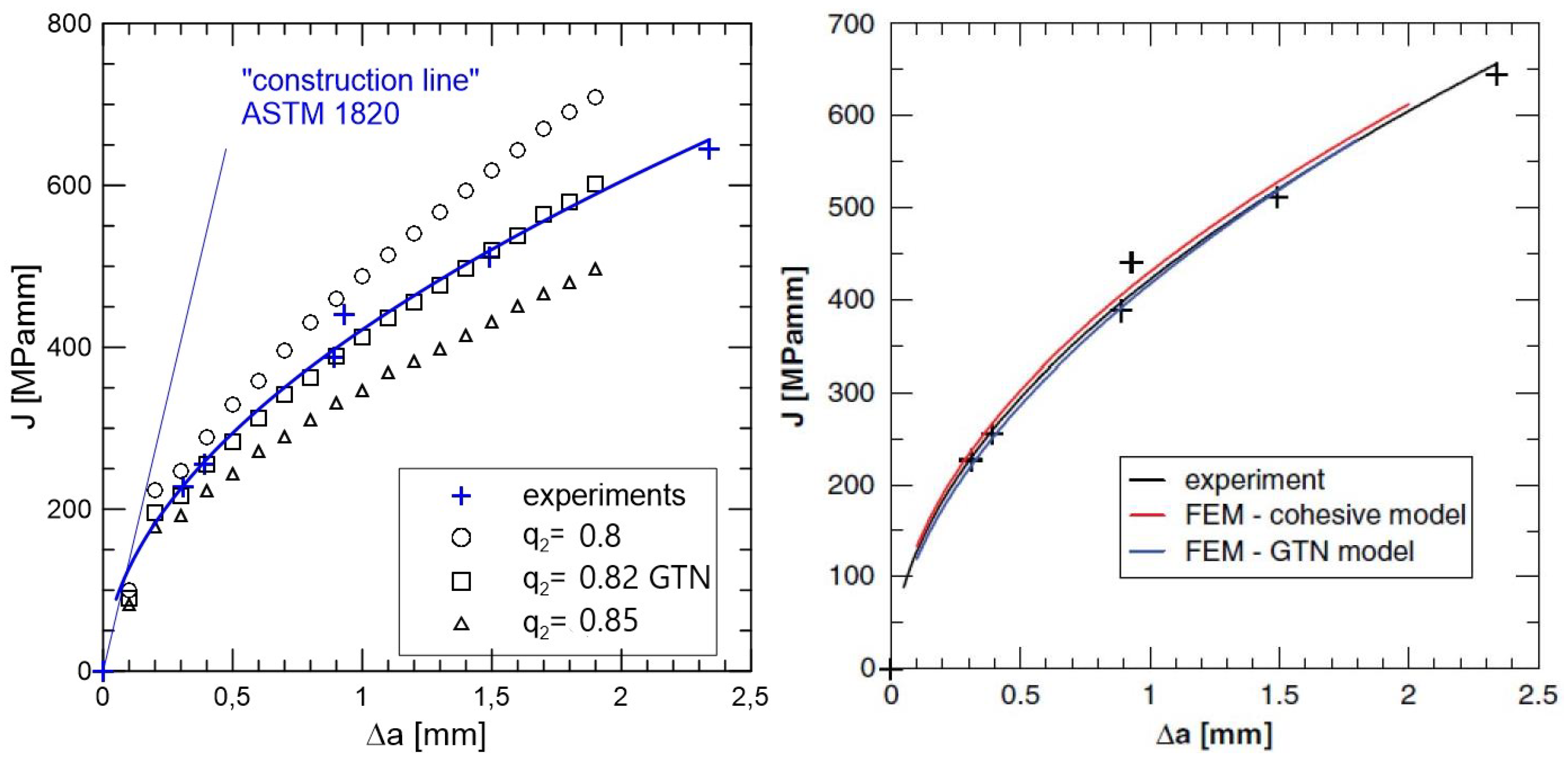
- When modelling the behaviour of commercial ceramic as , see Figure 13, the onset and the initiation of the crack length is slower when the effect of bridging into the model is introduced, which is closer to an experiment.
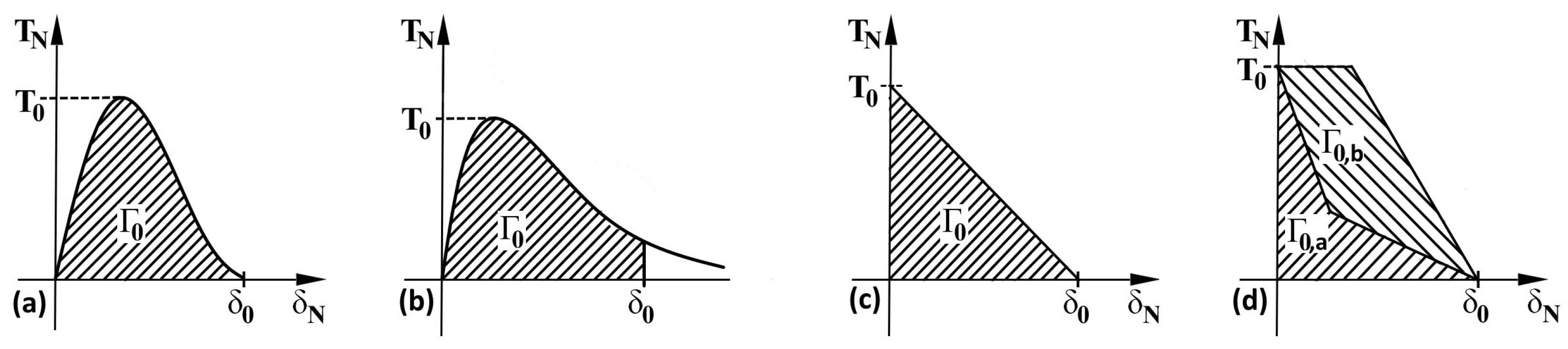
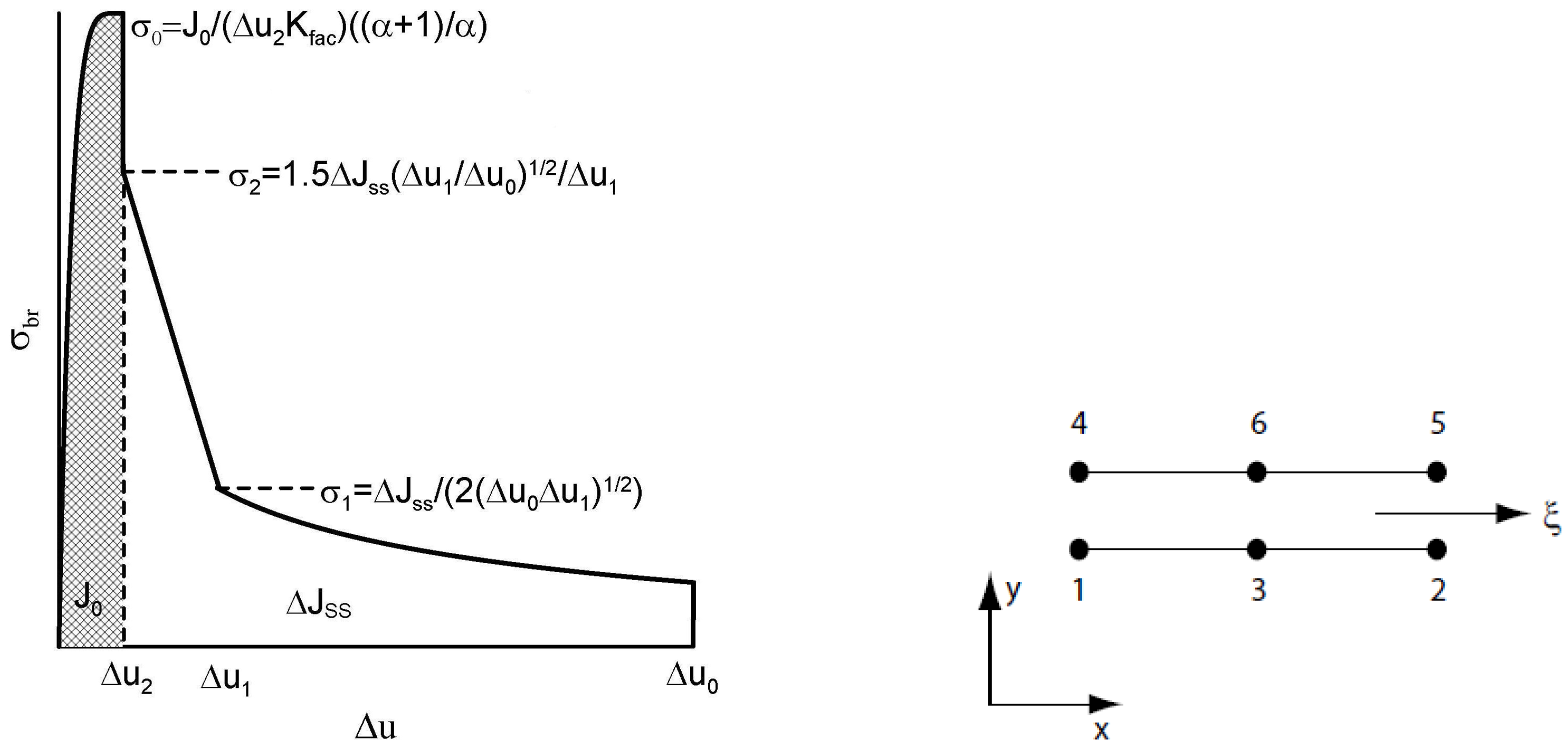
- It is very likely that early real bridging starts due to numerical oscillation and the obtained values of displacements after the crack initiation are smaller; see the shape of the traction–separation law in Figure 7.
- Real determination of the shape of the separation curve generates J – R prediction, at least the maximum stress must be determined on the basis of careful experimental procedures.
4. Conclusions
- The procedure for implementing the cohesion element into the FEM system was indicated.
- With the advent of fibre composites in technical practice, it is essential to be able to predict or model the behaviour of these materials. Not only must numerical methods solve new or modified procedures, including the existence of solutions, but the modelling result must also clearly approach reality. The problem is that many of the input data are estimated, which increases the risk of a possible wrong prediction.
- An example of numerical problems introduced is the form of the traction–separation law in cohesion models.
- Talking about the fineness of the FEM network can be counterproductive; it is necessary to start with the size of the RVE (representative volume element).
- Small modifications of XFEM with a focus on the applicability of these procedures were also tested on practical examples.
- For the modelling of microstructural behaviour using XFEM, it is often necessary to use, or rather to introduce, a real traction–separation law.
- Careful determination of the traction–separation law representing all phases of fibre reinforced composite behaviour enables a more accurate prediction of crack propagation predominantly in the initial phase of failure.
- In the case of cement composites, it is reasonable to use models that in a certain way average the stress field in front of the crack.
- The combination of the traction–separation law and XFEM is a promising approach for crack propagation modelling and is a strong motivation for further research.
- Three groups of materials were tested: ductile steel, ceramic composites and cementitious composites reinforced with metal fibres. From a microstructural point of view, the materials have different RVE sizes but the procedures and modelling of crack initiation and propagation using XFEM and using the cohesive approach are very similar.
- The outlined path is probably promising for the future higher industrial deployment of these fibre composites. For example, in the field of building composites, the production of building components with directed fibres in the given component is expected, which will enable production with clear, predictable properties.
- The theory of sharp stress concentrators in front of the crack tip for the named types of materials is abandoned, and so-called smeared models with averaged stress are promising and could be a subject of future research, as presented in this paper.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, W. A review of modeling of composite structures. Materials 2024, 17, 446. [Google Scholar] [CrossRef] [PubMed]
- Slatcher, S.; Evandt, Ø. Practical application of the weakest link model to fracture toughness problems. Eng. Fract. Mech. 1986, 24, 495–508. [Google Scholar] [CrossRef]
- Cui, W. A state-of-the-art review on fatigue life prediction methods for metal structures. J. Mar. Sci. Technol. 2002, 7, 43–56. [Google Scholar] [CrossRef]
- Krejsa, M.; Seitl, S.; Brožovslý, J.; Lehner, P. Fatigue damage prediction of short edge crack under various load: Direct optimized probabilistic calculation. Procedia Struct. Integr. 2017, 5, 1283–1290. [Google Scholar] [CrossRef]
- Hun, D.-A.; Guilleminot, J.; Yvonnet, J.; Bornert, M. Stochastic multiscale modeling of crack propagation in random heterogeneous media. Int. J. Numer. Methods Eng. 2019, 119, 1325–1344. [Google Scholar] [CrossRef]
- Kotrechko, S.; Kozák, V.; Zatsarna, O.; Zimina, G.; Stetsenko, N.; Dlouhý, I. Incorporation of temperature and plastic strain effects into local approach to fracture. Materials 2021, 14, 6224. [Google Scholar] [CrossRef]
- Mieczkowski, G.; Szymczak, T.; Szpica, D.; Borawski, A. Probabilistic modelling of fracture toughness of composites with discontinuous reinforcement. Materials 2023, 16, 2962. [Google Scholar] [CrossRef]
- Le, B.D.; Koval, G.; Chazallon, C. Discrete element approach in brittle fracture mechanics. Eng. Comput. 2013, 30, 263–276. [Google Scholar]
- Guan, J.; Zhang, L.; Li, L.; Yao, X.; He, S.; Niu, L.; Cao, H. Three-dimensional discrete element model of crack evolution on the crack tip with consideration of random aggregate shape. Theor. Appl. Fract. Mech. 2023, 127, 104022. [Google Scholar] [CrossRef]
- Xu, G.; Yue, Q.; Liu, X. Deep learning algorithm for real-time automatic crack detection, segmentation, qualification. Eng. Appl. Artif. Intell. 2023, 16, 1070852. [Google Scholar] [CrossRef]
- Griffith, A.A. The phenomena of rupture and flow in solids. Philos. Trans. R. Soc. A 1920, 221, 163–198. [Google Scholar]
- Sih, G.C. Strain-energy density factor applied to mixed mode crack problems. Int. J. Fract. 1974, 10, 304–321. [Google Scholar] [CrossRef]
- Sun, C.T.; Jin, Z.H. A comparison of cohesive zone modelling and classical fracture mechanics based on near tip stress field. Int. J. Solids Struct. 2006, 43, 1047–1060. [Google Scholar]
- Rice, J.R. A path independent integral and the approximate analysis of strain concentration by notches and cracks. J. Appl. Mech. 1968, 35, 379–386. [Google Scholar] [CrossRef]
- Goutianos, S. Derivation of path independent coupled mix mode cohesive laws from fracture resistance curves. Appl. Comp. Mater. 2017, 24, 983–997. [Google Scholar] [CrossRef]
- Barenblatt, G.I. The mathematical theory of equilibrium of cracks in brittle fracture. Adv. Appl. Mech. 1962, 7, 55–129. [Google Scholar]
- Erdogan, F.; Sih, G.C. On the crack extension in plates under plane loading and transverse shear. J. Basic Eng. 1963, 85, 519–527. [Google Scholar] [CrossRef]
- Enescu, I. Some researches regarding stress intensity factors in crack closure problems. WSEAS Trans. Appl. Theor. Mech. 2018, 13, 187–192. [Google Scholar]
- Tabiei, A.; Zhang, W. Cohesive element approach for dynamic crack propagation: Artificial compliance and mesh dependency. Eng. Fract. Mech. 2017, 180, 23–42. [Google Scholar] [CrossRef]
- Papenfuß, C. Continuum Thermodynamics and Constitutive Theory; Springer: Berlin, Germany, 2020. [Google Scholar]
- Hashiguchi, K. Elastoplasticity Theory; Springer: Berlin, Germany, 2014. [Google Scholar]
- Morandotti, M. Structured deformation of continua: Theory and applications. In Mathematical Analysis of Continuum Mechanics and Industrial Applications II: Proceedings of the International Conference CoMFoS16 16; Continuum Mechanics Focusing on Singularities; Springer: Singapore, 2018; pp. 125–136. [Google Scholar]
- Del Piero, G.; Owen, D.R. Structured deformations of continua. Arch. Ration. Mech. Anal. 1993, 124, 99–155. [Google Scholar] [CrossRef]
- Ogawa, K.; Ichitsubo, T.; Ishioka, S.; Ahuja, R. Irreversible thermodynamics of ideal plastic deformation. Cogent Phys. 2018, 5, 1496613. [Google Scholar] [CrossRef]
- Taira, S.; Ohtani, R.; Kitamura, T. Application of J-integral to high-temperature crack propagation, Part I—Creep crack propagation. J. Eng. Mater. Technol. 1979, 101, 154–161. [Google Scholar] [CrossRef]
- Landes, J.D.; Begley, J.A. Mechanics of Crack Growth; ASTM International: West Conshohocken, PA, USA, 1976. [Google Scholar]
- Riedel, H. Fracture at High Temperatures; Springer: Berlin, Germany, 1987. [Google Scholar]
- Kolednik, O.; Schöngrundner, F.; Fischer, D. A new view on J-integrals in elastic–plastic materials. Int. J. Fract. 2014, 187, 77–107. [Google Scholar] [CrossRef]
- Scheel, J.; Schlosser, A.; Ricoeur, A. The J-integral for mixed-mode loaded cracks with cohesive zones. Int. J. Fract. 2021, 227, 79–94. [Google Scholar] [CrossRef]
- Healy, B.; Gullerund, A.; Koppenhoefer, K. WARP3D Release 18.3.6. User Manual, 3-D Dynamic Nonlinear Fracture Analysis of Solids; University of Illinois: Chicago, IL, USA, 2023. [Google Scholar]
- Betegón, C.; Hancock, J.W. Two-parameters characterization of elastic-plastic crack tip field. J. Appl. Mech. 1991, 58, 104–110. [Google Scholar] [CrossRef]
- Gupta, M.; Anderliesten, R.C.; Benedictus, R. A review of T-stress and its effects in fracture mechanics. Eng. Fract. Mech. 2015, 134, 218–241. [Google Scholar] [CrossRef]
- Cedolin, L.; Bažant, Z.P. Effect of finite element choice in blunt crack band analysis. Comput. Methods Appl. Mech. Eng. 1980, 24, 205–316. [Google Scholar] [CrossRef]
- Beissel, S.R.; Johnson, G.R.; Popelar, C.H. An element-failure algorithm for dynamic crack propagation in general direction. Eng. Fract. Mech. 1998, 61, 407–425. [Google Scholar] [CrossRef]
- Hermosillo-Arteaga, A.; Romo, M.P.; Magaña, R.; Carrera, J. Automatic remeshing algorithm of triangular elements during finite element analyses. Rev. Int. Metodos Numer. Calc. Diseno Ing. 2018, 34, 26. [Google Scholar]
- Kachanov, L.M. Introduction to Continuum Damage Mechanics; Martinus Nijhoff: Dordrecht, The Netherlands, 1986. [Google Scholar]
- Gurson, A.L. Continuum theory of ductile rupture by void nucleation and growth: Part I—Yield criteria and flow rules for porous ductile media. J. Eng. Mater. Technol. 1977, 99, 2–15. [Google Scholar] [CrossRef]
- Tvergaard, V.; Needleman, A. Analysis of the cup-cone fracture in a round tensile bar. Acta Metall. 1984, 32, 157–169. [Google Scholar] [CrossRef]
- Vlček, L. Numerical Analysis of the Bodies with Cracks. Ph.D. Thesis, Brno University of Technology, Brno, Czech Republic, 2004. [Google Scholar]
- Brocks, W.; Klingbeil, D.; Künecke, G.; Sun, D.Z. Application of the Gurson model to ductile tearing resistance. In Constraint Effects in Fracture: Theory and Applications; Kirk, M., Bakker, A., Eds.; ASTM: Dallas, TX, USA, 1995; pp. 232–252. [Google Scholar]
- Zhan, Z.L. A complete Gurson model. In Nonlinear Fracture and Damage Mechanics; Alibadi, M.H., Ed.; WIT Press: Southampton, UK, 2001; pp. 223–248. [Google Scholar]
- Khoei, A.R. Extended Finite Element Method: Theory and Applications; J. Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Hansbo, A.; Hansbo, P. A finite element method for simulation of strong and weak discontinuities in solid mechanics. Comput. Methods Appl. Mech. Eng. 2006, 193, 3523–3540. [Google Scholar] [CrossRef]
- Areias, P.M.A.; Belytschko, T. Two-scale shear band evolution by local partition of unity. Int. J. Numer. Methods Eng. 2006, 66, 878–910. [Google Scholar] [CrossRef]
- Shen, Y.; Lew, A. Stability and convergence proofs for a discontinuous Galerkin-based extended finite element method for fracture mechanics. Comput. Methods Appl. Mech. Eng. 2010, 199, 2360–2382. [Google Scholar] [CrossRef]
- Stolarska, M.; Chopp, D.L.; Moës, N.N.; Belytschko, T. Modelling of crack growth by level sets in the extended finite element method. Int. J. Numer. Methods Eng. 2001, 51, 943–960. [Google Scholar] [CrossRef]
- Xiao, Q.Z.; Karihaloo, B.L. Improving the accuracy of XFEM crack tip fields using higher order quadrature and statically admissible stress recovery. Int. J. Numer. Methods Eng. 2006, 66, 1378–1410. [Google Scholar] [CrossRef]
- Moës, N.; Dolbow, J.; Belytchko, T. A finite element method for crack growth without remeshing. Int. J. Numer. Methods Eng. 1999, 46, 131–150. [Google Scholar] [CrossRef]
- Cui, C.; Zhang, G.; Banerjee, U.; Babuška, I. Stable generalized finite element method (SGFEM) for three-dimensional crack problems. Num. Math. 2022, 152, 475–509. [Google Scholar] [CrossRef]
- Babuška, I.; Melenk, J.M. The partition of unity method. Int. J. Numer. Methods Eng. 1997, 40, 727–758. [Google Scholar] [CrossRef]
- Fries, T.P.; Belytschko, T. The intrinsic XFEM: A method for arbitrary discontinuities without additional unknowns. Int. J. Numer. Methods Eng. 2006, 68, 1358–1385. [Google Scholar] [CrossRef]
- Fries, T.P.; Belytschko, T. The extended/generalized finite element method: An overview of the method and its applications. Int. J. Numer. Methods Eng. 2010, 84, 253–304. [Google Scholar] [CrossRef]
- Fries, T.P.; Baydoun, M. Crack propagation with the extended finite element method and a hybrid explicit-implicit crack description. Int. J. Numer. Methods Eng. 2012, 89, 1527–1558. [Google Scholar] [CrossRef]
- Shi, F.; Wang, D.; Yang, Q. An XFEM-based numerical strategy to model three-dimensional fracture propagation regarding crack front segmentation. Theor. Appl. Fract. Mech. 2022, 118, 103250. [Google Scholar] [CrossRef]
- Panday, V.B.; Singh, I.V.; Mishra, B.K. A new creep-fatigue interaction damage model and CDM-XFEM framework for creep-fatigue crack growth simulations. Theor. Appl. Fract. Mech. 2023, 124, 103740. [Google Scholar] [CrossRef]
- Liu, G.; Guo, J.; Bao, Y. Convergence investigation of XFEM enrichment schemes for modeling cohesive cracks. Mathematics 2022, 10, 383. [Google Scholar] [CrossRef]
- Xiao, G.; Wen, L.; Tian, R. Arbitrary 3D crack propagation with improved XFEM: Accurate and efficient crack geometries. Comput. Methods Appl. Mech. Eng. 2021, 377, 113659. [Google Scholar] [CrossRef]
- Jirásek, M. Damage and smeared crack models. In Numerical Modelling of Concrete Cracking; Hofstetter, G., Meschke, G., Eds.; Springer: Vienna, Austria, 2011; pp. 1–49. [Google Scholar]
- Mazars, J. A description of micro- and macroscale damage of concrete structures. Eng. Fract. Mech. 1986, 25, 729–737. [Google Scholar] [CrossRef]
- Comi, C. A non-local model with tension and compression damage mechanisms. Eur. J. Mech. A Solids 2001, 20, 1–22. [Google Scholar] [CrossRef]
- Arruda, M.R.T.; Pacheco, J.; Castro, L.M.S.; Julio, E. A modified Mazars damage model with energy regularization. Theor. Appl. Fract. Mech. 2023, 124, 108129. [Google Scholar] [CrossRef]
- Zhou, X.; Feng, B. A smeared-crack-based field-enriched finite element method for simulating cracking in quasi-brittle materials. Theor. Appl. Fract. Mech. 2023, 124, 103817. [Google Scholar] [CrossRef]
- Wu, B.; Li, Z.; Tang, K. Numerical modeling on micro-to-macro evolution of crack network for concrete materials. Teor. Appl. Fract. Mech. 2020, 107, 102525. [Google Scholar] [CrossRef]
- Giffin, B.D.; Zywicz, E. A smeared crack modeling framework accommodating multi-directional fracture at finite strains. Int. J. Fract. 2023, 239, 87–109. [Google Scholar] [CrossRef]
- Kozák, V.; Vala, J. Modelling of crack formation and growth using FEM for selected structural materials at static loading. WSEAS Trans. Appl. Theor. Mech. 2023, 18, 243–254. [Google Scholar] [CrossRef]
- Xie, M.; Gerstle, W.H. Energy based cohesive crack propagation modelling. J. Eng. Mech. 1995, 121, 1349–1358. [Google Scholar] [CrossRef]
- Blal, N.; Daridon, L.; Monerie, Y.; Pagano, S. Micromechanical-based criteria for the calibration of cohesive zone parameters. J. Comput. Appl. Math. 2013, 246, 206–214. [Google Scholar] [CrossRef]
- Sørensen, B.F.; Jacobsen, T.K. Determination of cohesive laws by the J integral approach. Eng. Fract. Mech. 2003, 70, 1841–1858. [Google Scholar] [CrossRef]
- Jin, Z.H.; Sun, C.T. Cohesive fracture model based on necking. Int. J. Fract. 2005, 134, 91–108. [Google Scholar] [CrossRef]
- Cuvilliez, S.; Feyel, F.; Lorentz, E.; Michel-Ponnelle, S. A finite element approach coupling a continuous gradient damage model and a cohesive zone model within the framework of quasi-brittle failure. Comput. Methods Appl. Mech. Eng. 2012, 237, 244–253. [Google Scholar] [CrossRef]
- Bouhala, L.; Makradi, A.; Belouettar, S.; Kiefer-Kamal, H.; Fréres, P. Modelling of failure in long fibres reinforced composites by X-FEM and cohesive zone model. Compos. Part B 2013, 55, 352–361. [Google Scholar] [CrossRef]
- Brighenti, R.; Scorza, D. Numerical modelling of the fracture behaviour of brittle materials reinforced with unidirectional or randomly distributed fibres. Mech. Mater. 2012, 52, 12–27. [Google Scholar] [CrossRef]
- Afshar, A.; Daneshyar, A.; Mohammadi, S. XFEM analysis of fiber bridging in mixed-mode crack propagation in composites. Compos. Struct. 2015, 125, 314–327. [Google Scholar] [CrossRef]
- Marfia, S.; Sacco, E. Numerical techniques for the analysis of crack propagation in cohesive materials. Int. J. Numer. Methods Eng. 2003, 57, 1577–1602. [Google Scholar] [CrossRef]
- Naghdinasab, M.; Farrokhabadi, A.; Madadi, H. A numerical method to evaluate the material properties degradation in composite RVEs due to fiber-matrix debonding and induced matrix cracking. Finite Elem. Anal. Des. 2018, 146, 84–95. [Google Scholar] [CrossRef]
- Gong, Y.; Zhang, H.; Jiang, L.; Ding, Z.; Hu, N. Determination of mixed-mode I/II fracture toughness and bridging law of composite laminates. Theor. Appl. Fract. Mech. 2023, 127, 104060. [Google Scholar] [CrossRef]
- Cunha, V.M.C.F.; Barros, J.A.O.; Sena-Cruz, J.M. An integrated approach for modelling the tensile behaviour of steel fibre reinforced self-compacting concrete. Cem. Concr. Res. 2011, 41, 64–76. [Google Scholar] [CrossRef]
- Kormaníková, E.; Kotrasová, K. Mixed-mode delamination in laminate plate with crack. Adv. Mater. Proc. 2018, 3, 512–516. [Google Scholar] [CrossRef]
- Lusis, V.; Krasnikovs, A.; Kononova, O.; Lapsa, V.-A.; Stonys, C.; Macanovskis, A.; Lukasnoks, A. Effect of short fibers orientation on mechanical properties of composite material—Fiber reinforced concrete. J. Civ. Eng. Manag. 2017, 23, 1091–1099. [Google Scholar] [CrossRef]
- Abadel, A.; Abbas, H.; Alrshoudi, F.; Altheeb, A.; Albidah, A.; Almusallam, T. Experimental and analytical investigation of fiber alignment on fracture properties of concrete. Structures 2020, 28, 2572–2581. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, Y.X.; Zhu, L.; Xiong, F.; Liu, J.; Gao, W. A particle-based cohesive crack model for brittle fracture problems. Materials 2020, 13, 3573. [Google Scholar] [CrossRef]
- Vala, J.; Hobst, L.; Kozák, V. Detection of metal fibres in cementitious composites based on signal and image processing approaches. WSEAS Trans. Appl. Theor. Mech. 2015, 10, 39–46. [Google Scholar]
- Kozák, V.; Vala, J. Crack growth modelling in cementitious composites using XFEM. Procedia Struct. Integr. 2023, 43, 47–52. [Google Scholar] [CrossRef]
- Shanmugasundaram, N.; Praveenkumar, S. Mechanical properties of engineered cementitious composites (ECC) incorporating different mineral admixtures and fibre: A review. J. Build. Pathol. Rehabil. 2022, 7, 40. [Google Scholar] [CrossRef]
- Wen, C.; Zhang, P.; Wang, J.; Hu, S. Influence of fibers on the mechanical properties and durability of ultra-high-performance concrete: A review. J. Build. Eng. 2022, 52, 104370. [Google Scholar] [CrossRef]
- Yan, Y.; Tian, L.; Zhao, W.; Aires Master Lazaro, S.; Li, X.; Tang, S. Dielectric and mechanical properties of cement pastes incorporated with magnetically aligned reduced graphene oxide. Dev. Built Environ. 2024, 18, 100471. [Google Scholar] [CrossRef]
- Rabinowitch, O. Debonding analysis of fiber-reinforced-polymer strengthened beams: Cohesive zone modelling versus a linear elastic fracture mechanics approach. Eng. Fract. Mech. 2008, 75, 2842–2859. [Google Scholar] [CrossRef]
- Barani, Q.R.; Khoei, A.R.; Mofid, M. Modelling of cohesive crack growth in partially saturated porous media: A study on the permeability of cohesive fracture. Int. J. Fract. 2011, 167, 15–31. [Google Scholar] [CrossRef]
- Hillerborg, A.; Modéer, M.; Peterson, P.-E. Analysis of crack formation and crack growth in concrete by means of fracture mechanics and finite elements. Cem. Concr. Res. 1976, 6, 773–781. [Google Scholar] [CrossRef]
- Kozák, V. Ductile crack growth modelling using cohesive zone approach. In Composites with Micro- and Nano-Structure; Kompiš, V., Ed.; Springer: Berlin, Germany, 2008; pp. 191–208. [Google Scholar]
- Kozák, V.; Chlup, Z.; Padělek, P.; Dlouhý, I. Prediction of traction separation law of ceramics using iterative finite element method. Solid State Phenom. 2017, 258, 186–189. [Google Scholar] [CrossRef]
- Moës, N.; Belytschko, T. Extended finite element method for cohesive crack growth. Eng. Fract. Mech. 2002, 69, 813–833. [Google Scholar] [CrossRef]
- Airoldi, A.; Davila, C.G. Identification of material parameters for modelling delamination in the presence of fibre bridging. Comp. Struct. 2012, 94, 3240–3249. [Google Scholar] [CrossRef]
- Coq, A.; Diani, J.; Brach, S. Comparison of the phase-field approach and cohesive element modelling to analyse the double cleavage drilled compression fracture test of an elastoplastic material. Int. J. Fract. 2024, 245, 1–14. [Google Scholar] [CrossRef]
- Yuan, Z.; Fish, J. Are the cohesive zone models necessary for delamination analysis? Comput. Methods Appl. Mech. Eng. 2016, 310, 567–604. [Google Scholar] [CrossRef]
- Aliabadi, M.H.; Saleh, A.L. Fracture mechanics analysis of cracking in plain and reinforced concrete using the boundary element method. Eng. Fract. Mech. 2002, 69, 267–280. [Google Scholar] [CrossRef]
- Belytschko, T.; Gracie, R.; Ventura, G. A review of extended/generalized finite element methods for material modelling. Modeling Simul. Mater. Sci. Eng. 2009, 17, 043001. [Google Scholar] [CrossRef]
- Yu, T.T.; Gong, Z.W. Numerical simulation of temperature field in heterogeneous material with the XFEM. Arch. Civ. Mech. Eng. 2013, 13, 199–208. [Google Scholar] [CrossRef]
- Park, K.; Paulino, G.H.; Roesler, J.R. Cohesive fracture model for functionally graded fibre reinforced concrete. Cem. Concr. Res. 2010, 40, 956–965. [Google Scholar] [CrossRef]
- Ye, C.; Shi, J.; Cheng, G.J. An extended finite element method (XFEM) study on the effect of reinforcing particles on the crack propagation behaviour in a metal-matrix composite. Int. J. Fatigue 2012, 44, 151–156. [Google Scholar] [CrossRef]
- Eringen, C.A. Nonlocal Continuum Field Theories; Springer: New York, NY, USA, 2002. [Google Scholar]
- Pike, M.G.; Oskay, C. XFEM modelling of short microfibre reinforced composites with cohesive interfaces. Finite Elem. Anal. Des. 2005, 106, 16–31. [Google Scholar] [CrossRef]
- Li, X.; Chen, J. An extensive cohesive damage model for simulation arbitrary damage propagation in engineering materials. Comput. Methods Appl. Mech. Eng. 2017, 315, 744–759. [Google Scholar] [CrossRef]
- Vala, J.; Kozák, V. Computational analysis of quasi-brittle fracture in fibre reinforced cementitious composites. Theor. Appl. Fract. Mech. 2020, 107, 102486. [Google Scholar] [CrossRef]
- Ebrahimi, S.H. Singularity analysis of cracks in hybrid CNT reinforced carbon fiber composites using finite element asymptotic expansion and XFEM. Int. J. Solids Struct. 2021, 14–15, 1–17. [Google Scholar] [CrossRef]
- Vala, J. Numerical approaches to the modelling of quasi-brittle crack propagation. Arch. Math. 2023, 59, 295–303. [Google Scholar] [CrossRef]
- Langenfeld, K.; Kurzeja, P.; Mosler, J. How regularization concepts interfere with (quasi-)brittle damage: A comparison based on a unified variational framework. Contin. Mech. Thermodyn. 2022, 34, 1517–1544. [Google Scholar] [CrossRef]
- Lu, X.; Guo, X.M.; Tan, V.B.C.; Tay, T.E. From diffuse damage to discrete crack: A coupled failure model for multi-stage progressive damage of composites. Comput. Methods Appl. Mech. Eng. 2021, 379, 113760. [Google Scholar] [CrossRef]
- Vilppo, J.; Kouhia, R.; Hartikainen, J.; Kolari, K.; Fedoroff, A.; Calonius, K. Anisotropic damage model for concrete and other quasi-brittle materials. Int. J. Solids Struct. 2021, 225, 111048. [Google Scholar] [CrossRef]
- Ottosen, N. A failure criterion for concrete. J. Eng. Mech. 1977, 103, 527–535. [Google Scholar] [CrossRef]
- Kachanov, I. Effective elastic properties of cracked solids: Critical review of some basic concepts. Appl. Mech. Rev. 1992, 45, 304–335. [Google Scholar] [CrossRef]
- Frémond, M.; Nejdar, B. Damage, gradient of damage and principle of virtual power. Int. J. Solids Struct. 1996, 33, 1083–1103. [Google Scholar] [CrossRef]
- Akagi, G.; Schimperna, G. Local well-posedness for Frémond’s model of complete damage in elastic solids. Eur. J. Appl. Math. 2020, 33, 309–327. [Google Scholar] [CrossRef]
- Bui, T.Q.; Tran, H.T.; Hu, X.; Wu, C.-T. Simulation of dynamic brittle and quasi-brittle fracture: A revisited local damage approach. Int. J. Fract. 2022, 236, 59–85. [Google Scholar] [CrossRef]
- Zhu, X. J-integral resistance curve testing and evaluation. J. Zhejiang Univ. Sci. A 2009, 10, 1541–1560. [Google Scholar] [CrossRef]
- Kumar, M.; Mukhopadhyay, S. Efficient modelling of progressive damage due to quasi-static indentation on multidirectional laminates by a mesh orientation independent kinematically enriched continuum damage model. Compos. Part A 2024, 178, 108002. [Google Scholar] [CrossRef]
- Wang, Y. A 3D stochastic damage model for concrete under monotonic and cyclic loadings. Cem. Concr. Res. 2023, 171, 107208. [Google Scholar] [CrossRef]
- Michael, N.E.; Bansal, R.C.; Ismail, A.A.A.; Elnady, A.; Hasan, S. A cohesive structure of Bi-directional long-short-term memory (BiLSTM)-GRU for predicting hourly solar radiation. Renew. Energy 2024, 222, 119943. [Google Scholar] [CrossRef]
- Oldfield, M.; Dini, D.; Giordano, G.; Rodriguez y Baena, F. Detailed finite element modelling of deep needle insertions into a soft tissue phantom using a cohesive approach. Comput. Methods Biomech. Biomed. Eng. 2013, 16, 530–543. [Google Scholar] [CrossRef]
- Vellwock, A.E.; Libonati, F. XFEM for composites, biological, and bioinspired materials: A review. Materials 2024, 17, 745. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozák, V.; Vala, J. Use of Cohesive Approaches for Modelling Critical States in Fibre-Reinforced Structural Materials. Materials 2024, 17, 3177. https://doi.org/10.3390/ma17133177
Kozák V, Vala J. Use of Cohesive Approaches for Modelling Critical States in Fibre-Reinforced Structural Materials. Materials. 2024; 17(13):3177. https://doi.org/10.3390/ma17133177
Chicago/Turabian StyleKozák, Vladislav, and Jiří Vala. 2024. "Use of Cohesive Approaches for Modelling Critical States in Fibre-Reinforced Structural Materials" Materials 17, no. 13: 3177. https://doi.org/10.3390/ma17133177
APA StyleKozák, V., & Vala, J. (2024). Use of Cohesive Approaches for Modelling Critical States in Fibre-Reinforced Structural Materials. Materials, 17(13), 3177. https://doi.org/10.3390/ma17133177