
Concrete Defect Localization Based on Multilevel Convolutional Neural Networks

Abstract
:1. Introduction
2. Convolutional Neural Network Algorithm
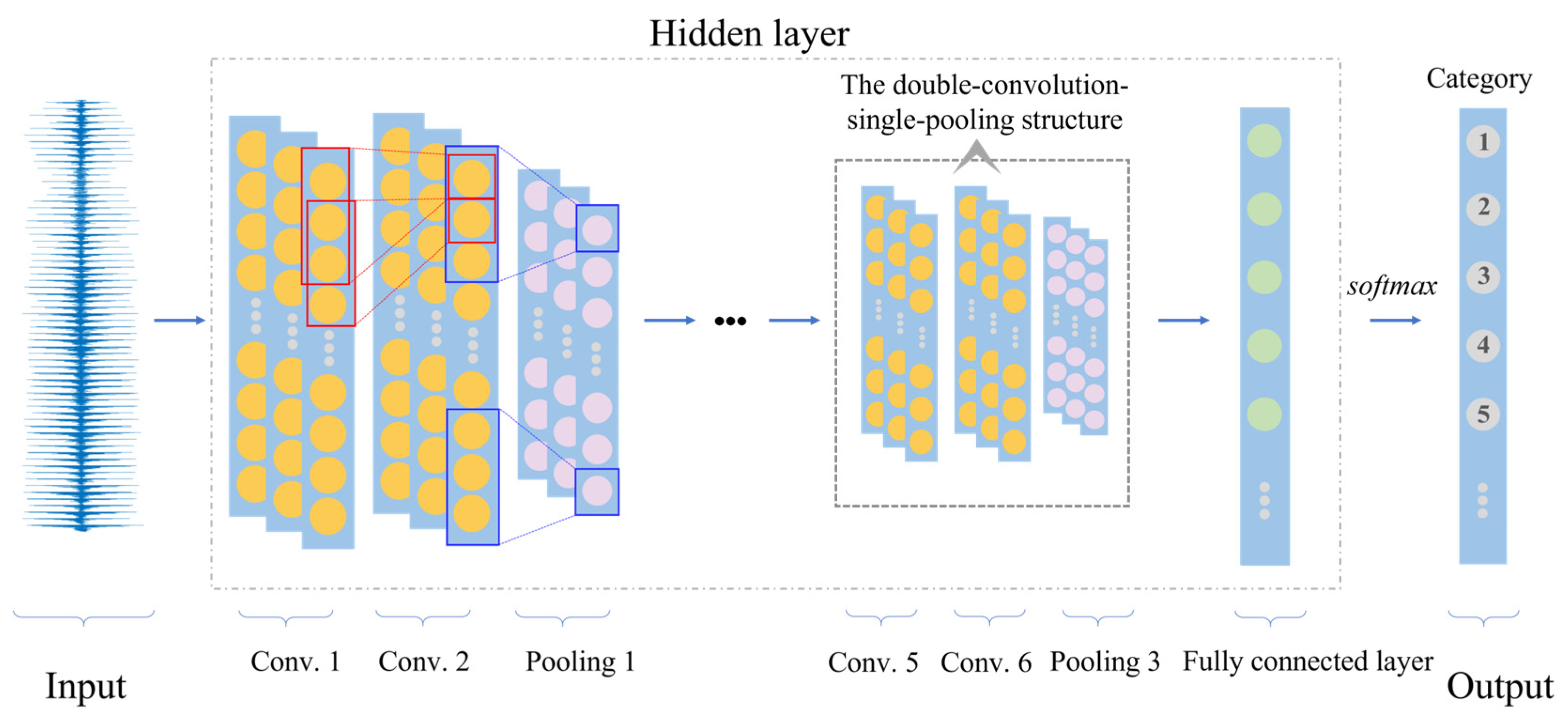
2.1. Basic Principles of Convolutional Neural Networks
2.2. Feature Extraction and Classification
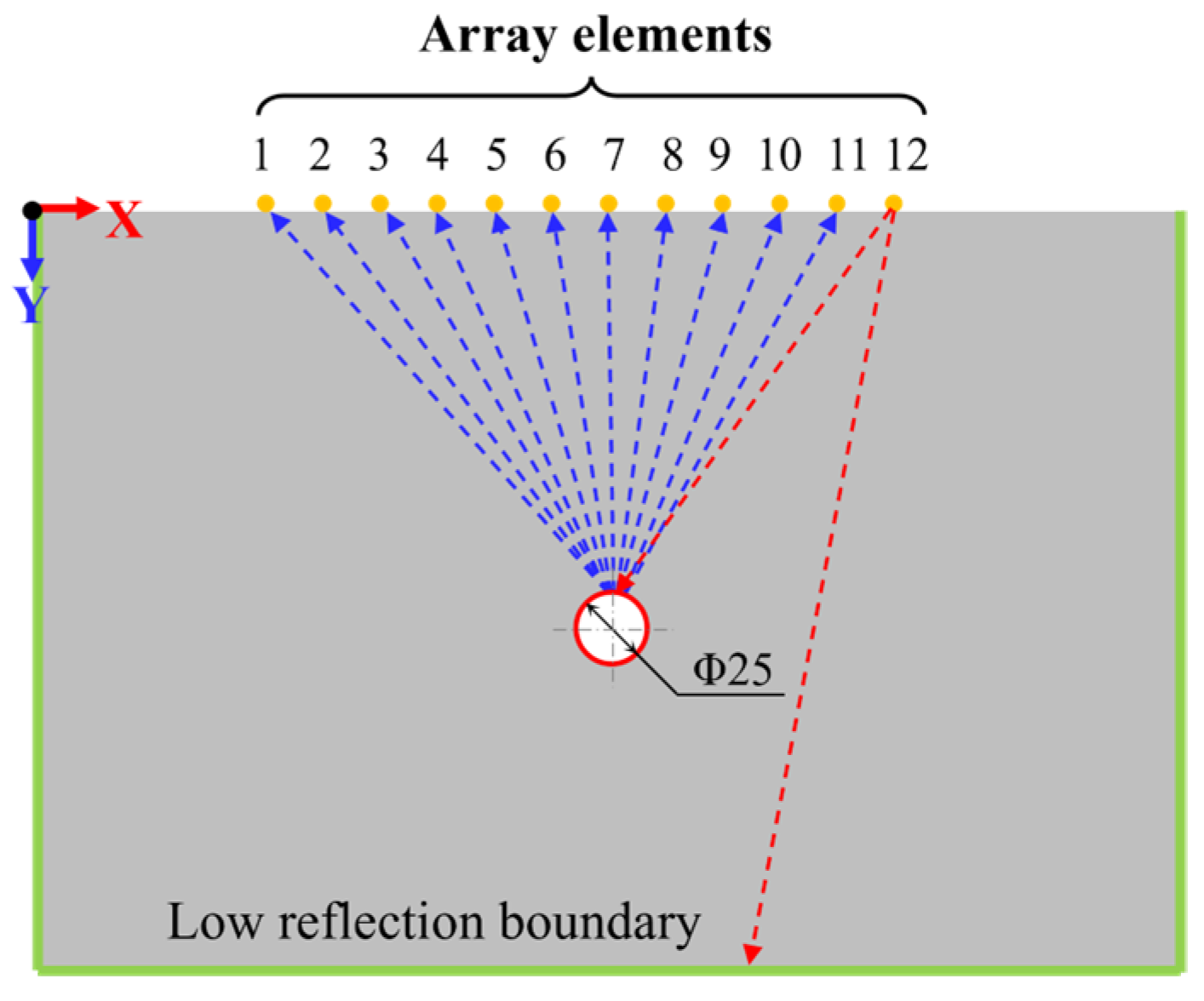
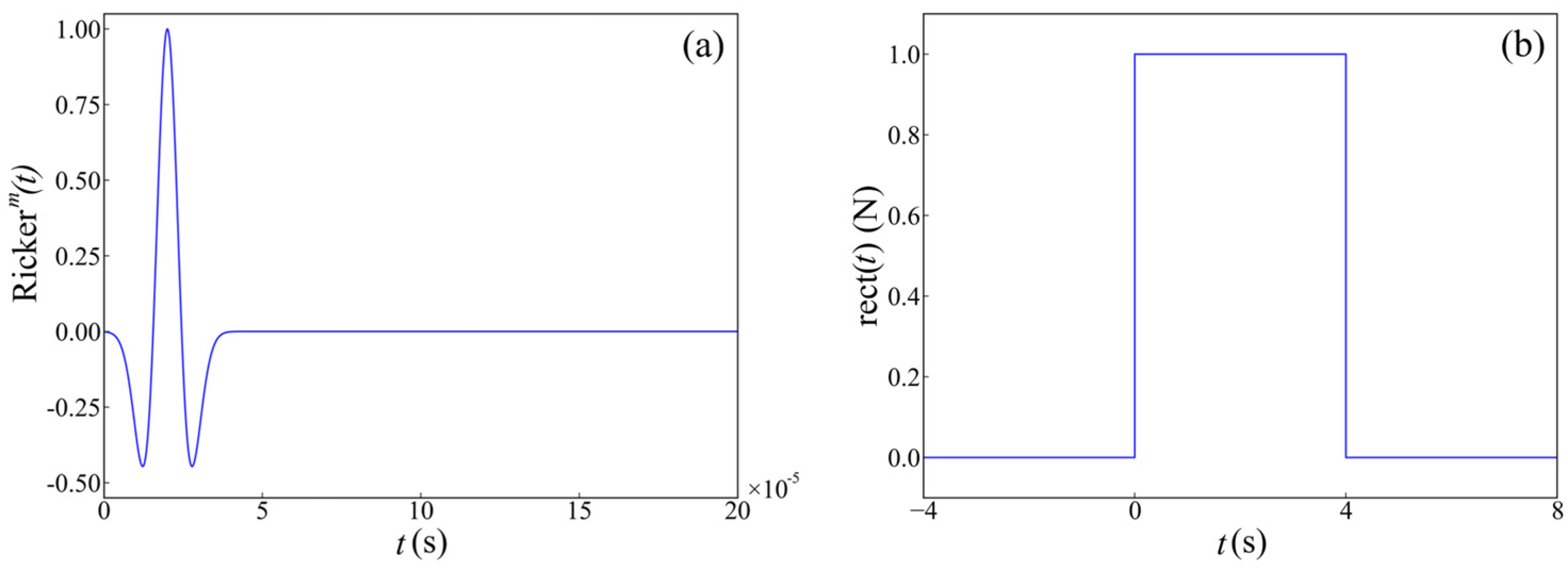
3. The Principle of Array Ultrasonic Testing
4. Numerical Studies
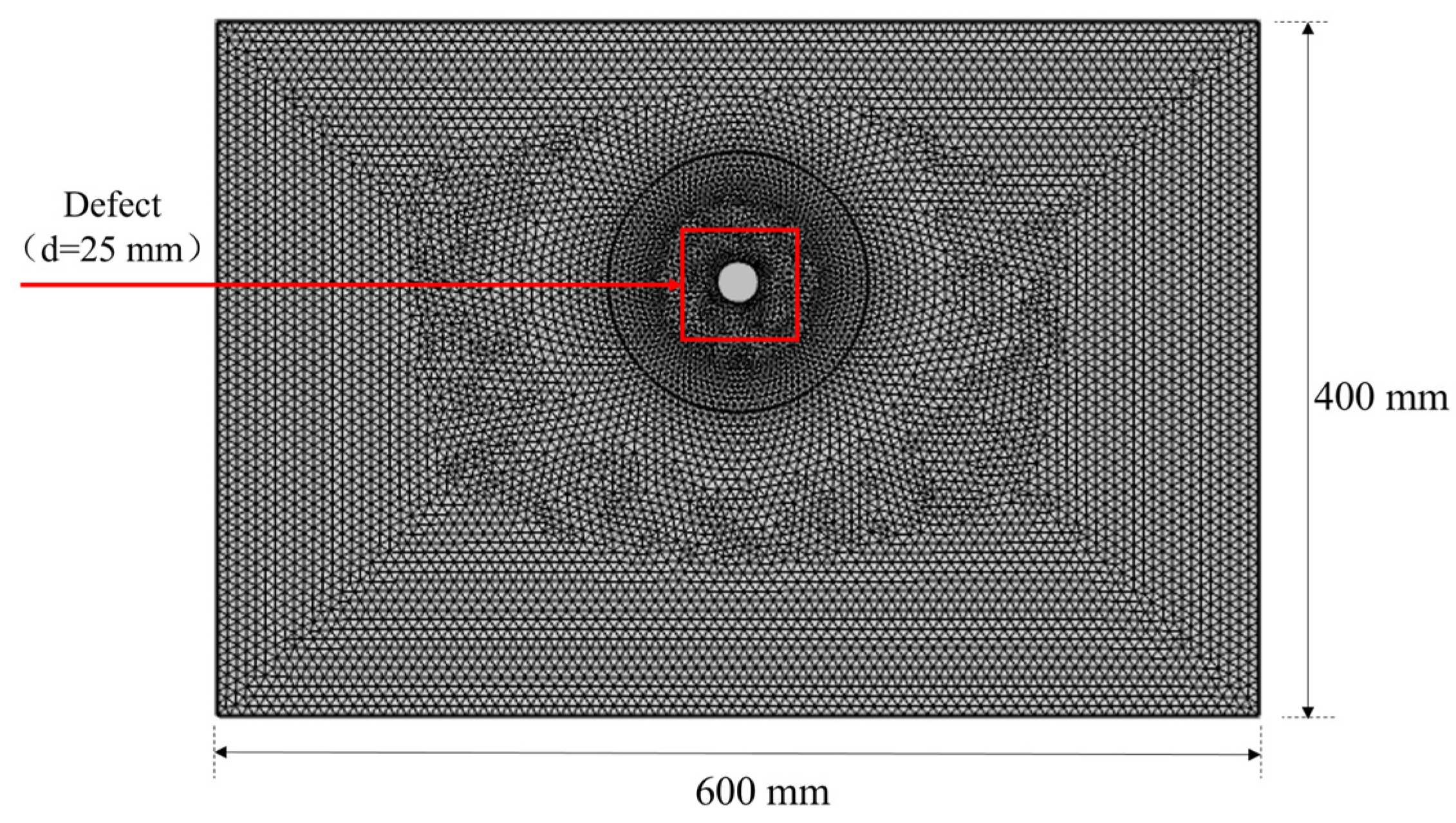
4.1. Model Establishment
4.2. Multilevel Classification Method
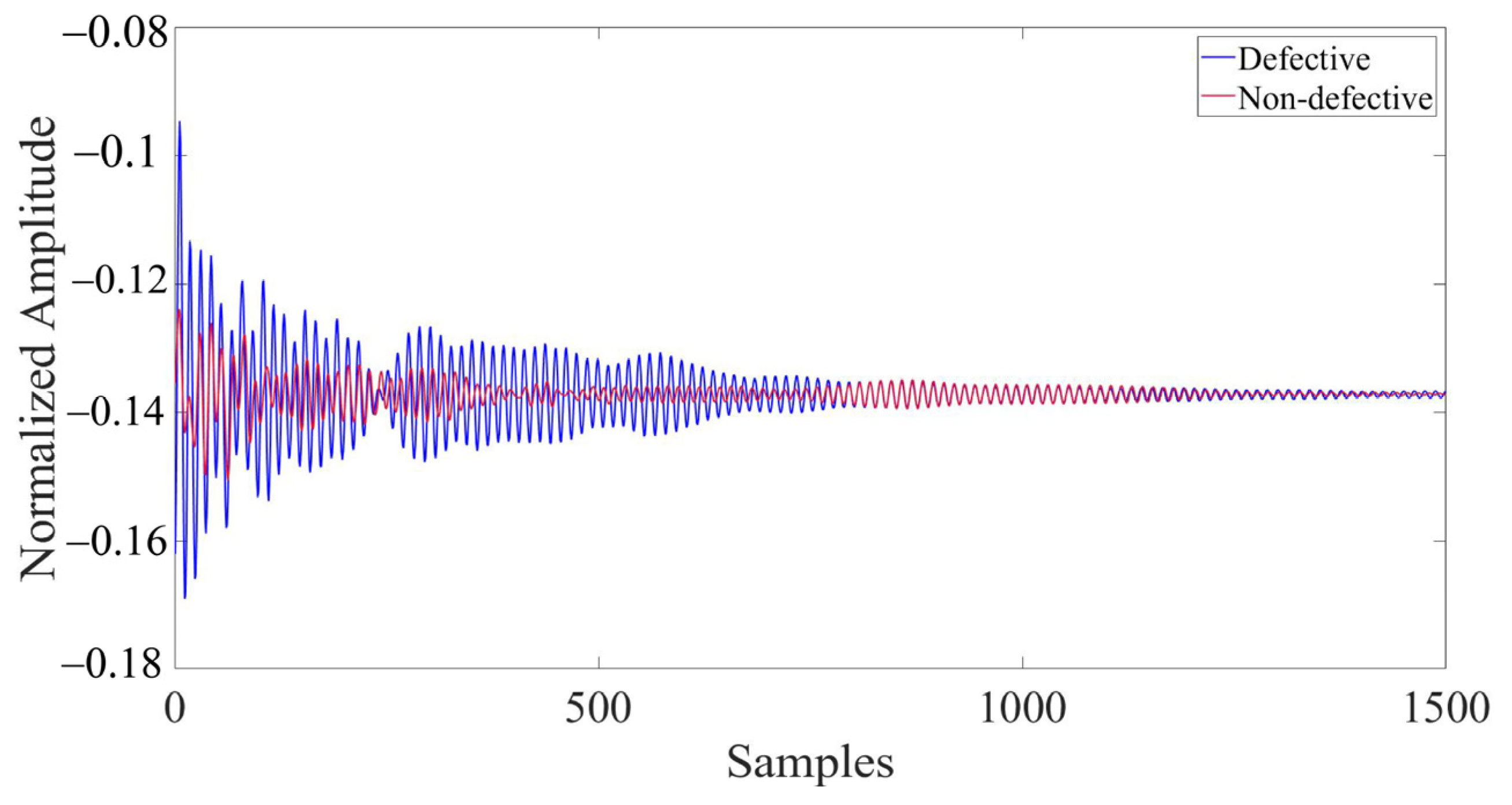
4.3. Data Acquisition
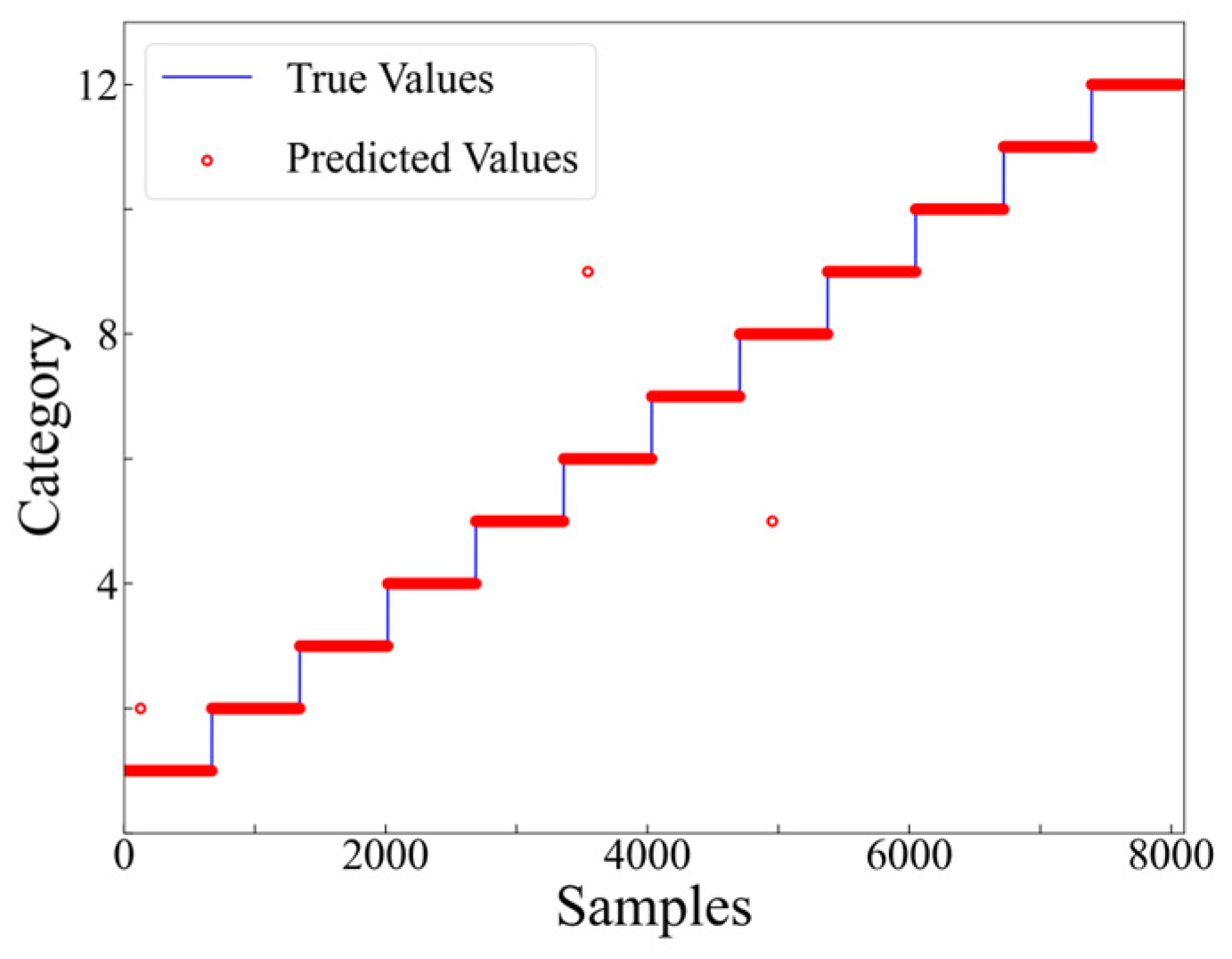
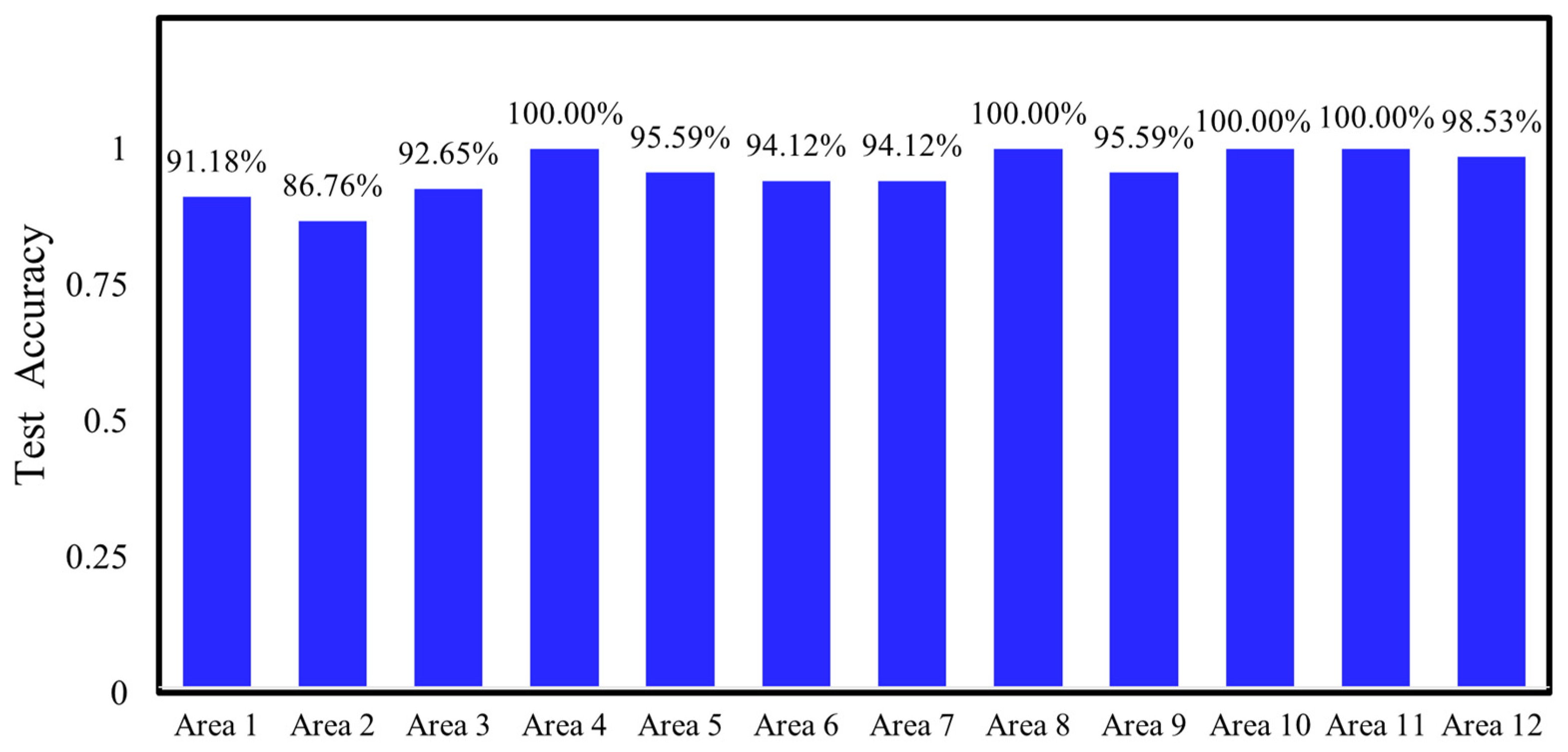
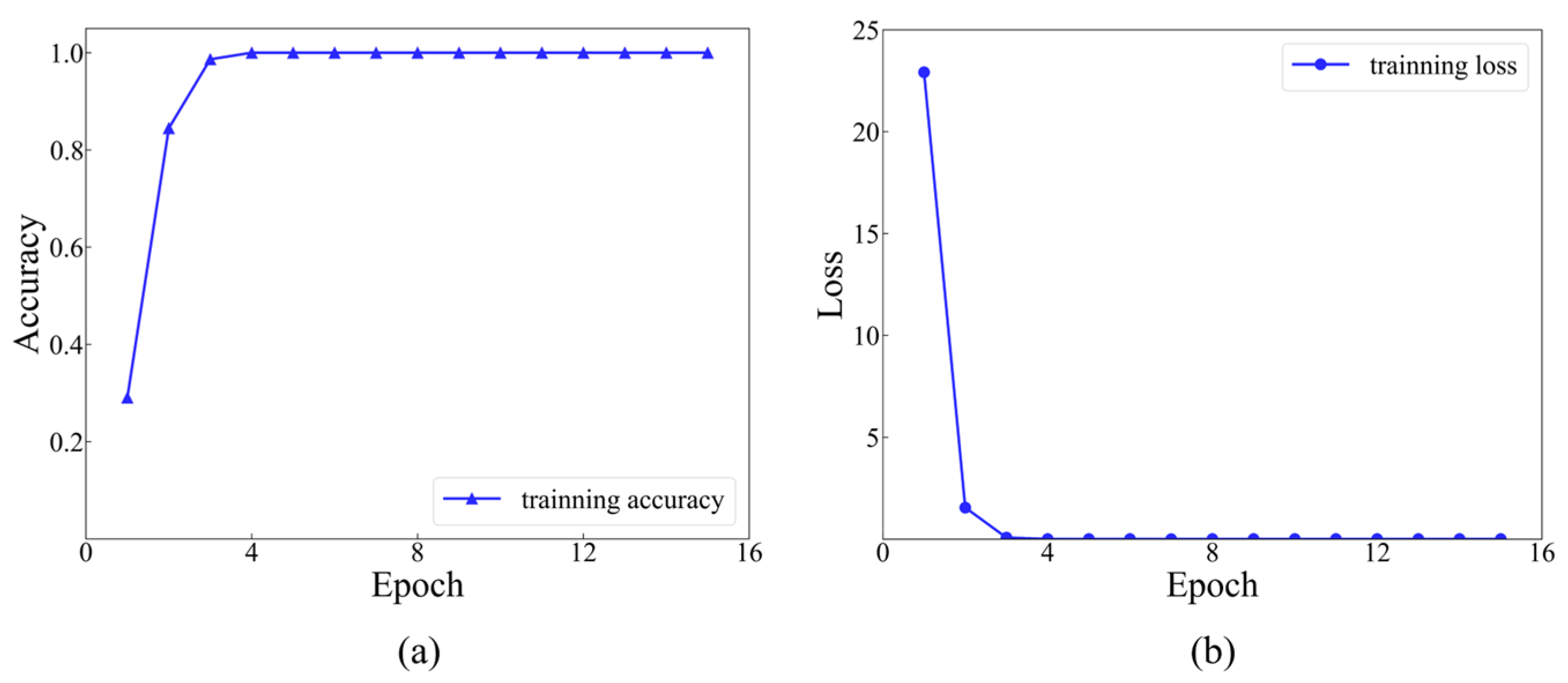
4.4. Training Process and Result Analysis
5. Experimental Case Study: Localization of Hole Defects in Concrete
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Chen, Z.J.; Liu, Y.J.; Chen, Y.; Du, Y.; Zhou, F. Interfacial debonding detection for CFST structures using an ultrasonic phased array: Application to the shenzhen seg building. Mech. Syst. Signal Process. 2023, 192, 110214. [Google Scholar] [CrossRef]
- Breysse, D.; Klysz, G.; Dérobert, X.; Sirieix, C.; Lataste, J. How to combine several non-destructive techniques for a better assessment of concrete structures. Cem. Concr. Res. 2008, 38, 783–793. [Google Scholar] [CrossRef]
- Maierhofer, C. Non-destructive testing of concrete material properties and concrete structures. Cem. Concr. Compos. 2006, 28, 297–298. [Google Scholar] [CrossRef]
- Wang, B.; Zhong, S.; Lee, T.-L.; Fancey, K.S.; Mi, J. Non-destructive testing and evaluation of composite materials/structures: A state-of-the-art review. Adv. Mech. Eng. 2020, 12, 1687814020913761. [Google Scholar] [CrossRef]
- Honarvar, F.; Varvani-Farahani, A. A review of ultrasonic testing applications in additive manufacturing: Defect evaluation, material characterization, and process control. Ultrasonics 2020, 108, 106227. [Google Scholar] [CrossRef]
- Kazemi, F.; Asgarkhani, N.; Jankowski, R. Machine learning-based seismic response and performance assessment of reinforced concrete buildings. Arch. Civ. Mech. Eng. 2023, 23, 94. [Google Scholar] [CrossRef]
- García-Martín, J.; Gómez-Gil, J.; Vázquez-Sánchez, E. Non-destructive techniques based on eddy current testing. Sensors 2011, 11, 2525–2565. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Kang, S.; Kim, W.; Cho, H.; Park, C.; Lee, D.; Kim, G.; Park, S.; Lee, H.; Park, J.; et al. Improvement of radiographic visibility using an image restoration method based on a simple radiographic scattering model for x-ray nondestructive testing. NDT E Int. 2018, 98, 117–122. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, B.; Kang, Y.; Liu, B.; Wang, S.; Duan, Z. A novel thermography-based dry magnetic particle testing method. IEEE Trans. Instrum. Meas. 2022, 71, 9505309. [Google Scholar] [CrossRef]
- Godinho, L.; Dias-Da-Costa, D.; Areias, P.; Júlio, E.; Soares, D. Numerical study towards the use of a SH wave ultrasonic-based strategy for crack detection in concrete structures. Eng. Struct. 2013, 49, 782–791. [Google Scholar] [CrossRef]
- Kim, J.; Cho, Y.; Lee, J.; Kim, Y.H. Defect detection and characterization in concrete based on FEM and ultrasonic techniques. Materials 2022, 15, 8160. [Google Scholar] [CrossRef] [PubMed]
- Dolati, S.S.K.; Malla, P.; Ortiz, J.D.; Mehrabi, A.; Nanni, A. Identifying NDT methods for damage detection in concrete elements reinforced or strengthened with F.R.P. Eng. Struct. 2023, 287, 116155. [Google Scholar] [CrossRef]
- Drinkwater, B.W.; Wilcox, P.D. Ultrasonic arrays for non-destructive evaluation: A review. NDT E Int. 2006, 39, 525–541. [Google Scholar] [CrossRef]
- Hernandez, J.R.G.; Bleakley, C.J. Low-cost, wideband ultrasonic transmitter and receiver for array signal processing applications. IEEE Sens. J. 2011, 11, 1284–1292. [Google Scholar] [CrossRef]
- Zhang, Q.; Luo, C.; Wang, R.; Guo, X. Investigation on characteristics of a MXenes-based air-coupled capacitive ultrasonic transducer array. IEEE Sens. J. 2023, 23, 28696–28705. [Google Scholar] [CrossRef]
- Wooh, S.C.; Wang, J.Y. Nondestructive characterization of defects using a novel hybrid ultrasonic array sensor. NDT E Int. 2002, 35, 155–163. [Google Scholar] [CrossRef]
- Song, S.P.; Li, Y.X. Sparse decomposition-based 3D ultrasound imaging and its application in pipeline defect testing using a multi-transducer composite array. Nondestruct. Test. Eval. 2018, 33, 237–252. [Google Scholar] [CrossRef]
- Bazulin, A.E.; Bazulin, E.G.; Vopilkin, A.K.; Tikhonov, D.S.; Smotrova, S.A.; Ivanov, V.I. Testing samples made of polymer composite materials using ultrasonic antenna arrays. Russ. J. Nondestruct. Test. 2022, 58, 411–424. [Google Scholar] [CrossRef]
- Yang, J.; Fan, G.; Xiang, Y.; Zhang, H.; Zhu, W.; Zhang, H.; Li, Z. Low-frequency ultrasonic array imaging for detecting concrete structural defects in blind zones. Constr. Build. Mater. 2024, 425, 135948. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Rusk, N. Deep learning. Nat. Methods 2016, 13, 35. [Google Scholar] [CrossRef]
- Munir, N.; Kim, H.-J.; Song, S.-J.; Kang, S.-S. Investigation of deep neural network with drop out for ultrasonic flaw classification in weldments. J. Mech. Sci. Technol. 2018, 32, 3073–3080. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Y.F. Deep learning based crack damage detection technique for thin plate structures using guided lamb wave signals. Smart Mater. Struct. 2020, 29, 015032. [Google Scholar] [CrossRef]
- Slonski, M.; Schabowicz, K.; Krawczyk, E. Detection of flaws in concrete using ultrasonic tomography and convolutional neural networks. Materials 2020, 13, 1557. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.Q.; Pang, D.D.; Li, C.D. A deep learning approach for fast detection and classification of concrete damage. Autom. Constr. 2021, 128, 103785. [Google Scholar] [CrossRef]
- Wang, L.; Ye, W.; Zhu, Y.; Yang, F.; Zhou, Y. Optimal parameters selection of back propagation algorithm in the feedforward neural network. Eng. Anal. Bound. Elem. 2023, 151, 575–596. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Ye, W.; Li, Y.; Yang, F. Ultrasonic lamination defects detection of carbon fiber composite plates based on multilevel L.S.T.M. Compos. Struct. 2024, 327, 117714. [Google Scholar] [CrossRef]
- Cha, Y.J.; Choi, W.; Büyüköztürk, O. Deep learning-based crack damage detection using convolutional neural networks. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Yi, Q.; Wang, H.; Guo, R.; Li, S.; Jiang, Y. Laser ultrasonic quantitative recognition based on wavelet packet fusion algorithm, S.V.M. Optik 2017, 149, 206–219. [Google Scholar] [CrossRef]
- Li, W.; Wu, G.; Zhang, F.; Du, Q. Hyperspectral image classification using deep pixel-pair features. IEEE Trans. Geosci. Remote Sens. 2017, 55, 844–853. [Google Scholar] [CrossRef]
- Basiri, M.E.; Nemati, S.; Abdar, M.; Cambria, E.; Acharrya, U.R. Abcdm: An attention-based bidirectional CNN-RNN deep model for sentiment analysis. Future Gener. Comput. Syst. Int. J. Escience 2021, 115, 279–294. [Google Scholar] [CrossRef]
- Pettres, R.; De Lacerda, L.A. Reconhecimento de padrões de defeitos em concreto a partir de imagens térmicas estacionárias e redes neurais artificiais. Ágora Rev. Divulg. Científica 2010, 17, 1–12. [Google Scholar]
- Sambath, S.; Nagaraj, P.; Selvakumar, N. Automatic defect classification in ultrasonic NDT using artificial intelligence. J. Nondestruct. Eval. 2011, 30, 20–28. [Google Scholar] [CrossRef]
- Munir, N.; Kim, H.-J.; Park, J.; Song, S.-J.; Kang, S.-S. Convolutional neural network for ultrasonic weldment flaw classification in noisy conditions. Ultrasonics 2019, 94, 74–81. [Google Scholar] [CrossRef] [PubMed]
- Seventekidis, P.; Giagopoulos, D.; Arailopoulos, A.; Markogiannaki, O. Structural health monitoring using deep learning with optimal finite element model generated data. Mech. Syst. Signal Process. 2020, 145, 106972. [Google Scholar] [CrossRef]
- Roy, A.M. An efficient multi-scale CNN model with intrinsic feature integration for motor imagery EEG subject classification in brain-machine interfaces. Biomed. Signal Process. Control 2022, 74, 103496. [Google Scholar] [CrossRef]
- Hu, J.; Wen, W.; Zhang, C.; Zhai, C.; Pei, S.; Wang, Z. Rapid peak seismic response prediction of two-story and three-span subway stations using deep learning method. Eng. Struct. 2024, 300, 117214. [Google Scholar] [CrossRef]
- Cha, Y.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Lin, S.; Shams, S.; Choi, H.; Azari, H. Ultrasonic imaging of multi-layer concrete structures. NDT E Int. 2018, 98, 101–109. [Google Scholar] [CrossRef]
- Sony, S.; Dunphy, K.; Sadhu, A.; Capretz, M. A systematic review of convolutional neural network-based structural condition assessment techniques. Eng. Struct. 2021, 226, 111347. [Google Scholar] [CrossRef]
- Chen, M.Q.; Yu, L.J.; Zhi, C.; Sun, R.; Zhu, S.; Gao, Z.; Ke, Z.; Zhu, M.; Zhang, Y. Improved faster R-CNN for fabric defect detection based on gabor filter with genetic algorithm optimization. Comput. Ind. 2022, 134, 103551. [Google Scholar] [CrossRef]
- Chen, L.K.; Chen, W.X.; Wang, L.; Zhai, C.; Hu, X.; Sun, L.; Tian, Y.; Huang, X.; Jiang, L. Convolutional neural networks (CNNs)-based multi-category damage detection and recognition of high-speed rail (HSR) reinforced concrete (RC) bridges using test images. Eng. Struct. 2023, 276, 115306. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Phan TT, V.; Ho, D.D.; Pradhan, A.M.S.; Huynh, T.-C. Deep learning-based autonomous damage-sensitive feature extraction for impedance-based prestress monitoring. Eng. Struct. 2022, 259, 114172. [Google Scholar] [CrossRef]
- Guo, X.F.; Han, Y.; Nie, P.F. Ultrasound imaging algorithm: Half-matrix focusing method based on reciprocity. Math. Probl. Eng. 2021, 2021, 8888469. [Google Scholar] [CrossRef]
- Li, X.; Yu, G.; Wang, N.; Gao, D.; Wang, H. Flux projection beamforming for monochromatic source localization in enclosed space. J. Acoust. Soc. Am. 2017, 141, EL1–EL5. [Google Scholar] [CrossRef]
- Ricker, N. The form and laws of propagation of seismic wavelets. Geophysics 1953, 18, 10–40. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| fz (kHz) | fs (kHz) | cS (m/s) | cL (m/s) | ρ (kg/m3) | E | μ |
|---|---|---|---|---|---|---|
| 50 | 1000 | 2281.7 | 3526.5 | 2300 | 2.73 × 1010 | 0.14 |
| Description | Values |
|---|---|
| Learning Rate | 0.01 |
| Activation function | Tanh |
| Batch size | 32 |
| Epoch | 15 |
| Optimizer | Adam |
| Loss function | Categorical cross-entropy |
| Total Dataset | Testing Set | Accuracy | Loss | Number of Prediction Errors | Total Number of Prediction Errors | |||
|---|---|---|---|---|---|---|---|---|
| The multilevel classification CNN method | The first level | 8064 | 804 | 99.63 | 0.0059 | 3 | 38 | |
| The second level | Area 1 | 672 | 67 | 91.18 | 0.2467 | 6 | ||
| Area 2 | 672 | 67 | 86.76 | 0.3060 | 9 | |||
| Area 3 | 672 | 67 | 92.65 | 0.4643 | 5 | |||
| Area 4 | 672 | 67 | 100 | 0.0170 | 0 | |||
| Area 5 | 672 | 67 | 95.59 | 0.1392 | 3 | |||
| Area 6 | 672 | 67 | 94.12 | 0.2271 | 4 | |||
| Area 7 | 672 | 67 | 94.12 | 0.1508 | 4 | |||
| Area 8 | 672 | 67 | 100 | 0.0013 | 0 | |||
| Area 9 | 672 | 67 | 95.59 | 0.0810 | 3 | |||
| Area 10 | 672 | 67 | 100 | 0.0124 | 0 | |||
| Area 11 | 672 | 67 | 100 | 0.0109 | 0 | |||
| Area 12 | 672 | 67 | 98.53 | 0.0315 | 1 | |||
| The traditional CNN method | 8064 | 806 | 85.38 | 3.7743 | 118 | 118 | ||
| Training Time (s) | Inference Time (s) | ||
|---|---|---|---|
| The multilevel classification CNN method | The first level | 11,236.13 | 3.15 |
| The second level (per category) | 933.28 | 3.11 | |
| The traditional CNN method | 14,257.31 | 7.09 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, L.; Ye, W.; Zhang, F.; Pan, Y.; Li, Y. Concrete Defect Localization Based on Multilevel Convolutional Neural Networks. Materials 2024, 17, 3685. https://doi.org/10.3390/ma17153685
Wang Y, Wang L, Ye W, Zhang F, Pan Y, Li Y. Concrete Defect Localization Based on Multilevel Convolutional Neural Networks. Materials. 2024; 17(15):3685. https://doi.org/10.3390/ma17153685
Chicago/Turabian StyleWang, Yameng, Lihua Wang, Wenjing Ye, Fengyi Zhang, Yongdong Pan, and Yan Li. 2024. "Concrete Defect Localization Based on Multilevel Convolutional Neural Networks" Materials 17, no. 15: 3685. https://doi.org/10.3390/ma17153685