
Radial Inertia Effect of Ultra-Soft Materials from Hopkinson Bar and Solution Methodologies
Abstract
:1. Introduction
2. Experiments and Simulations
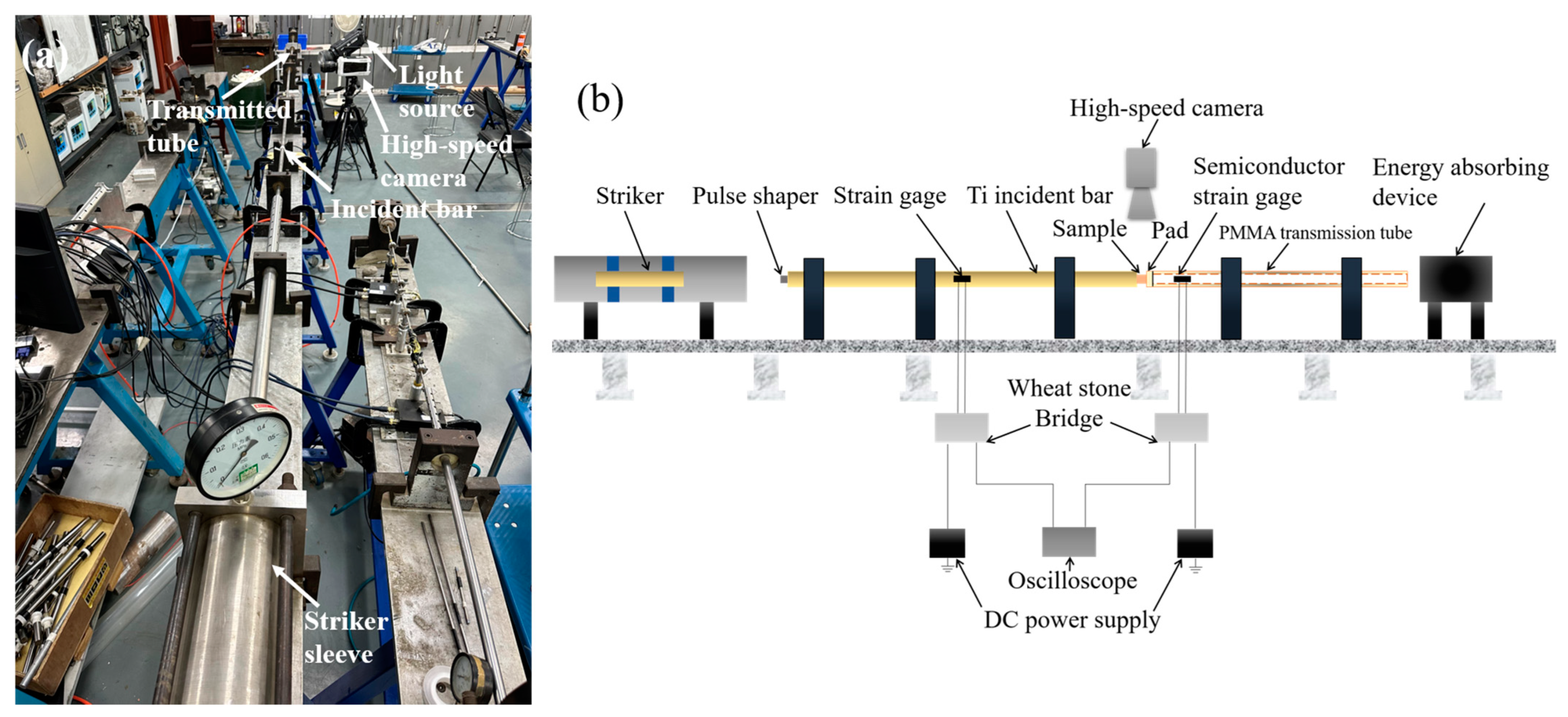
2.1. Modified SHPB
2.2. Sample Preparation
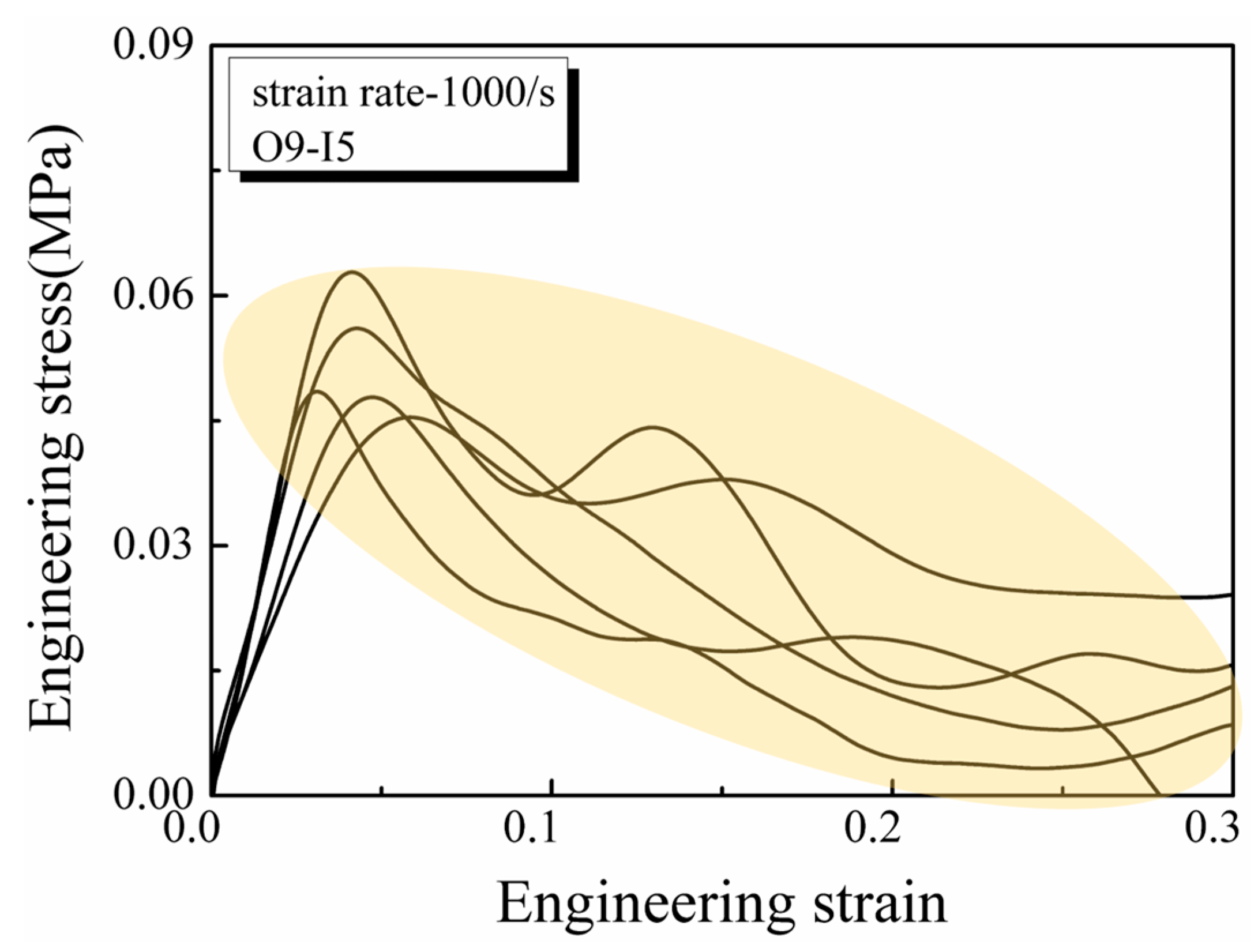
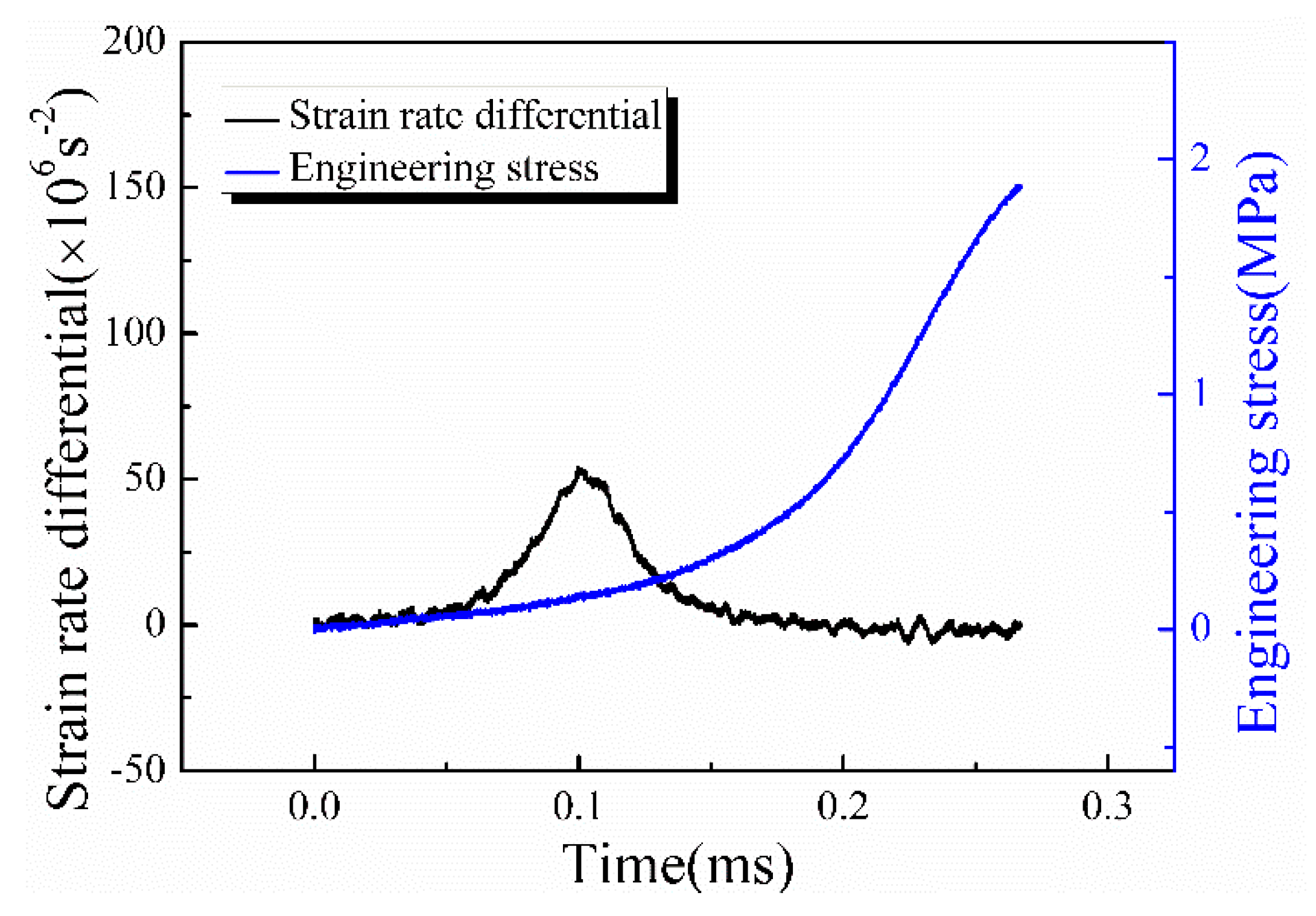
2.3. Characteristic of Spike Stress
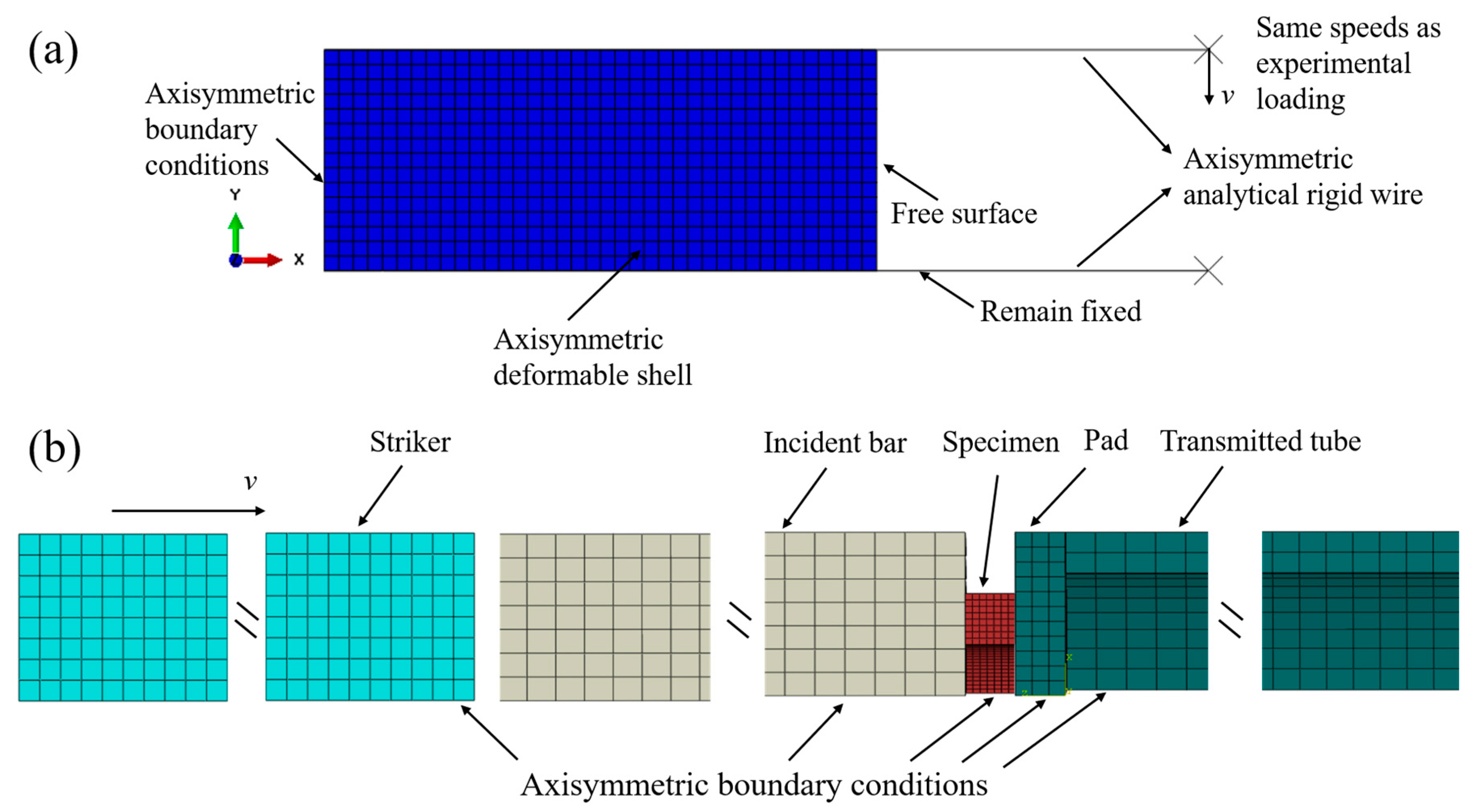
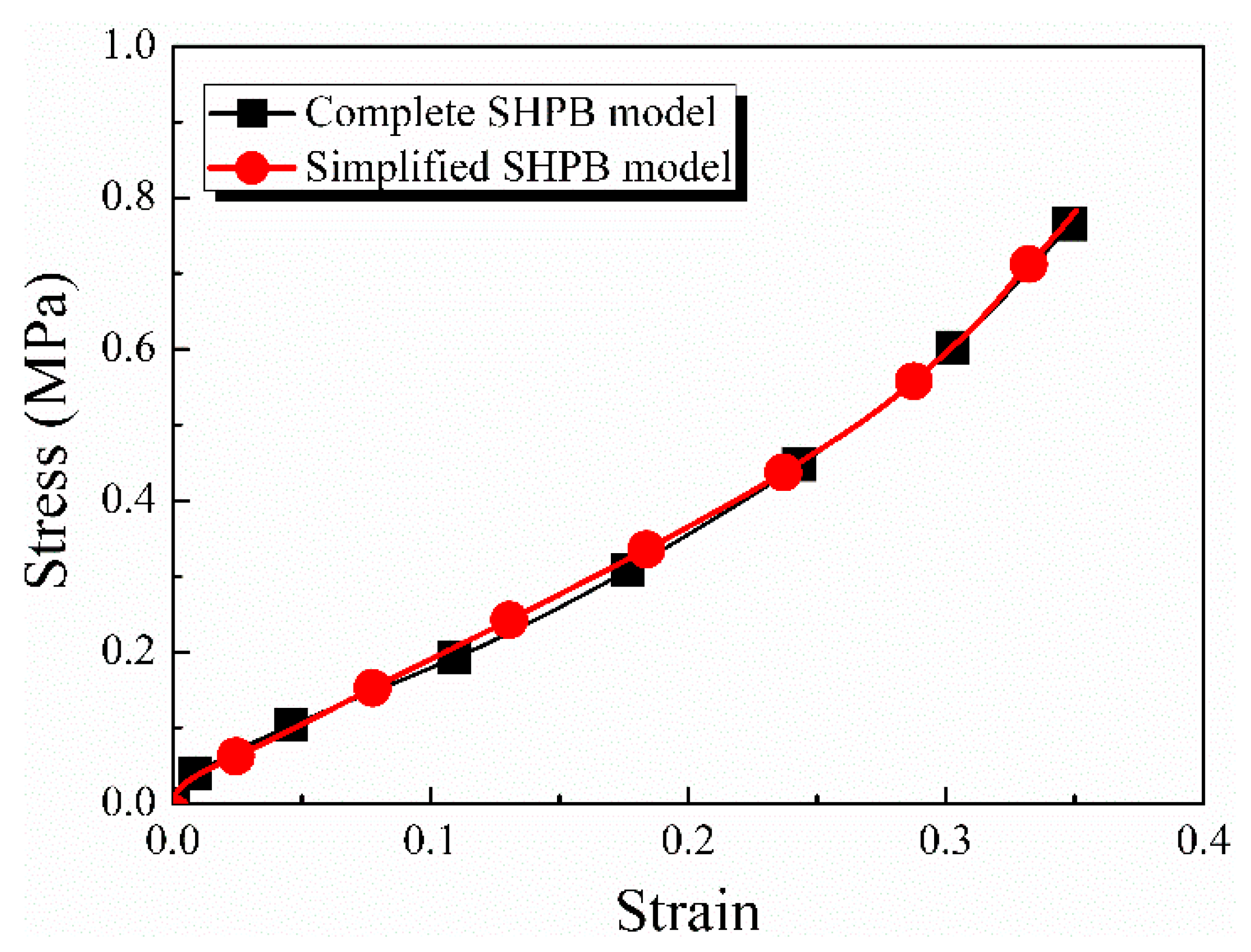
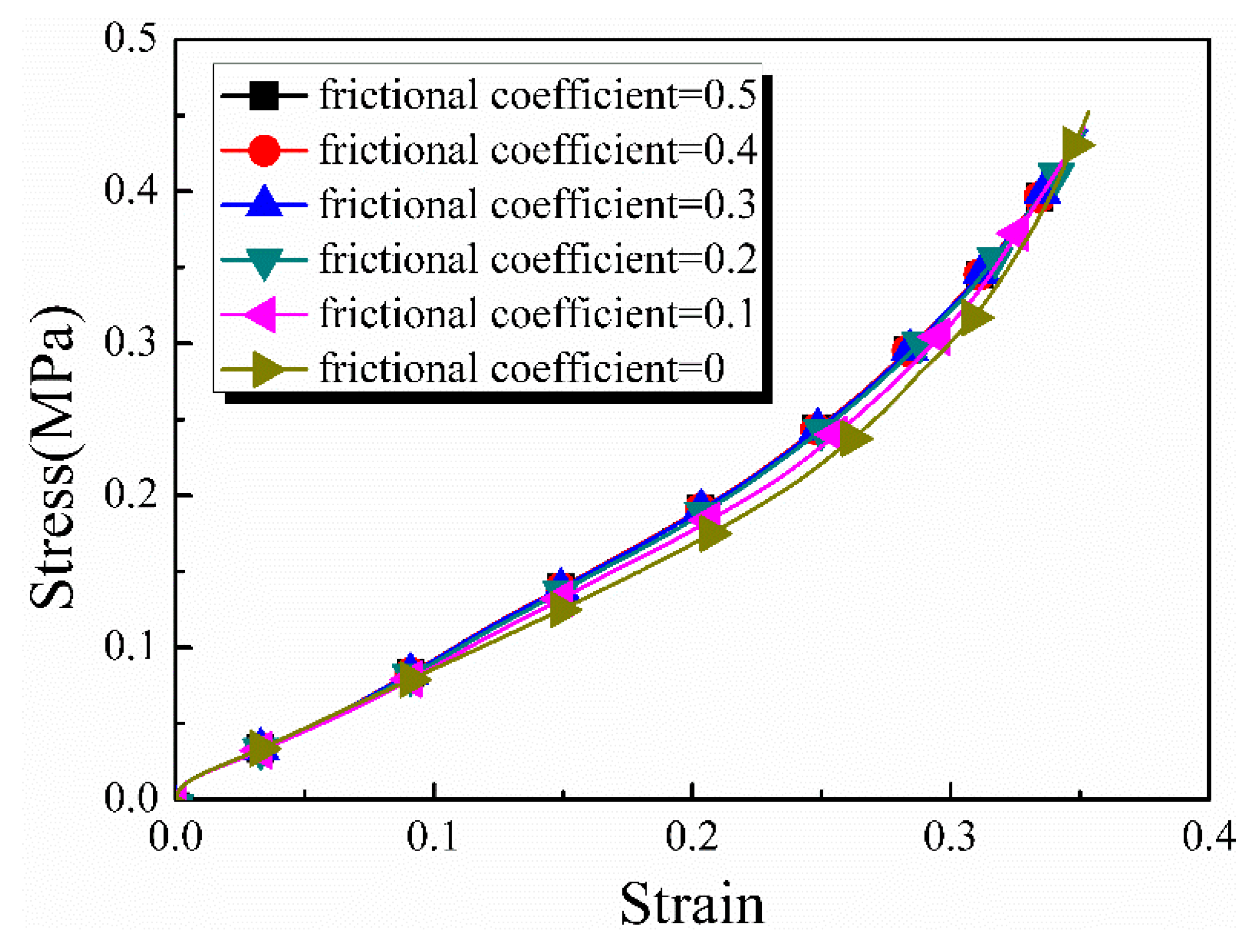
2.4. Finite Element Model
3. Results and Discussion
4. Conclusions
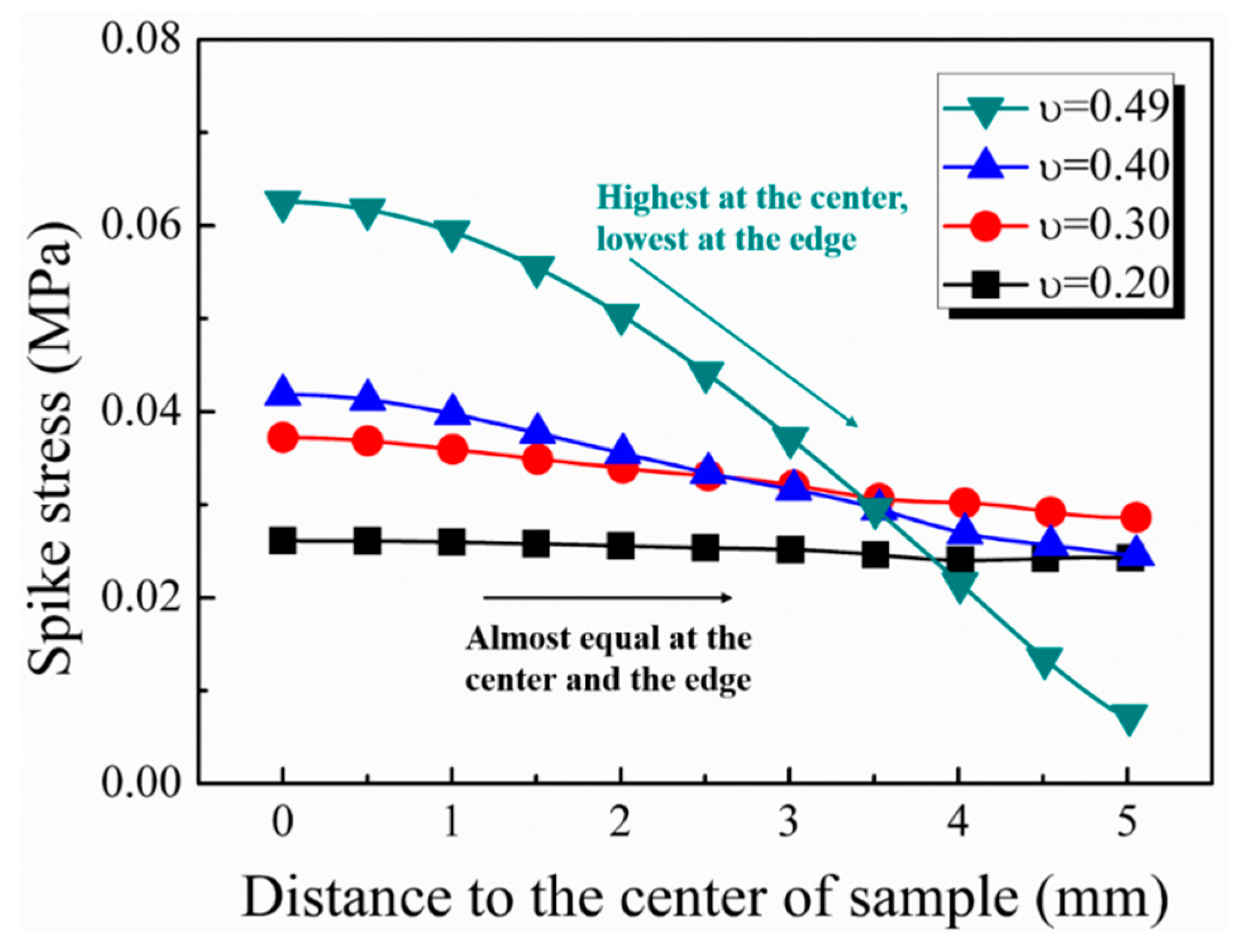
- The peak spike stress varied linearly with the density and strain acceleration. When the Poisson’s ration exceeded 0.3, it was distributed in a parabolic trend along the radial direction of the specimen; this trend diminished when the ratio was less than 0.3.
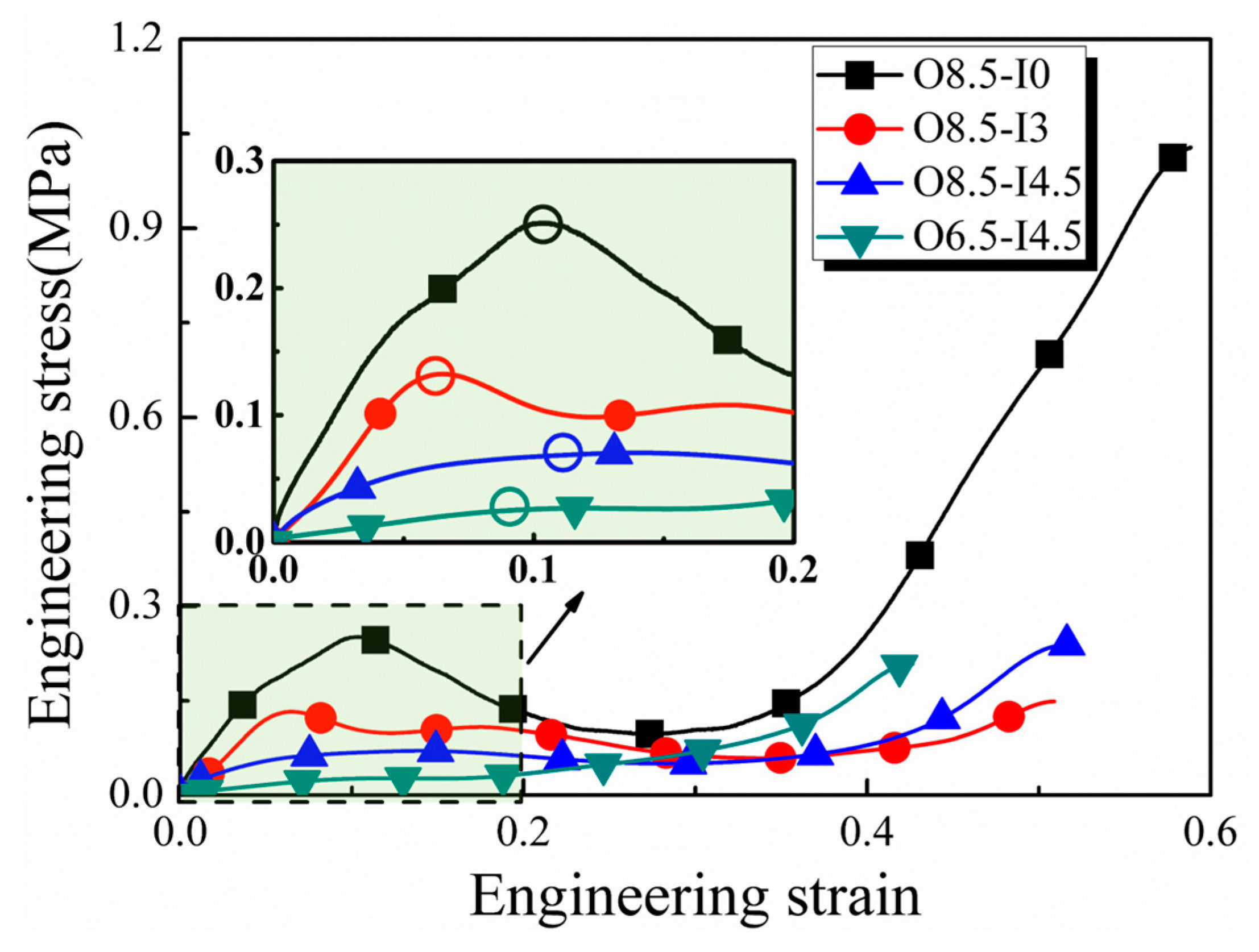
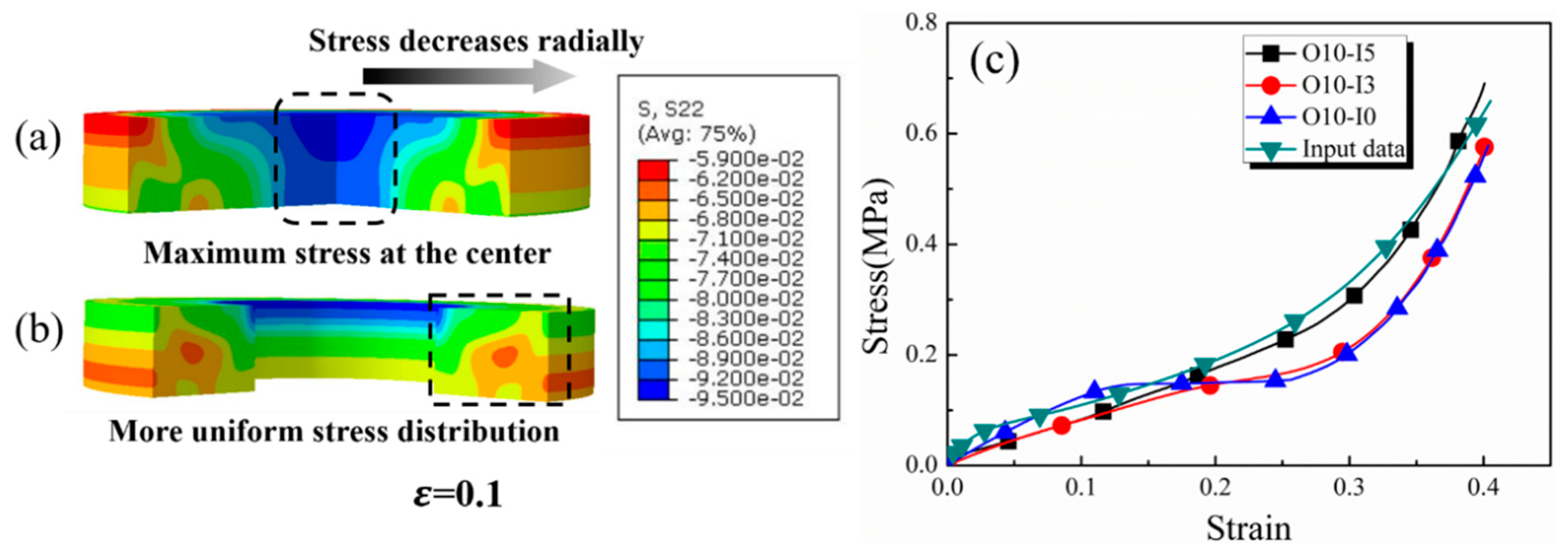
- The simulation results indicate a direct relationship between the radial inertia stress and the diameter ratio of the specimen. The radial inertia stress decreased significantly when the diameter ratio exceeded 20% and stabilized above 30%. As for the diameter ratio of 50%, the minimum radial inertia stress occurred, and the results were preferred, which was also confirmed due to their good agreement with experimental results.
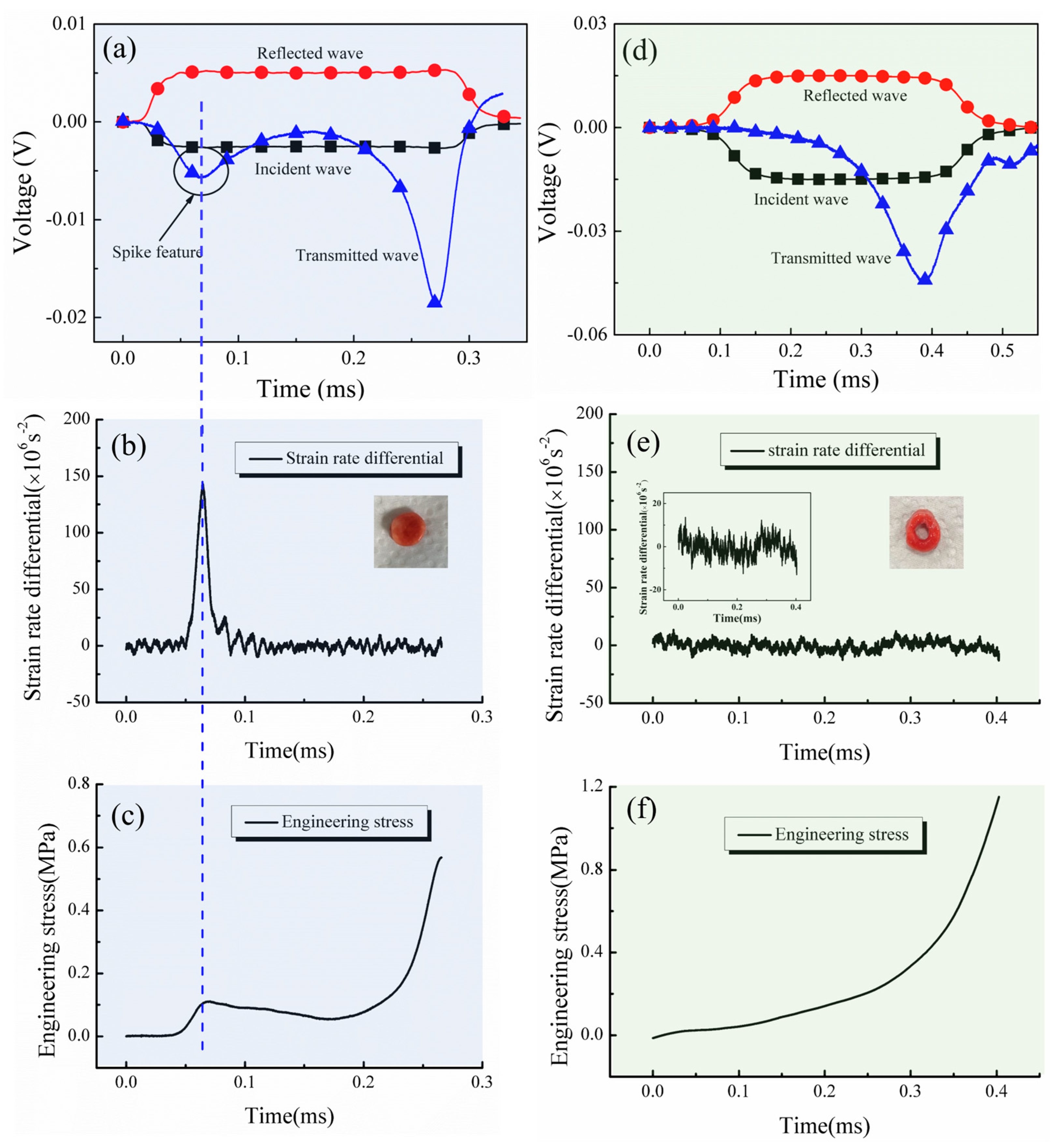
- Two methods were proposed to reduce the spike stress caused by the radial inertia effect. One was removing the central part of the specimen to form an annular specimen, and the other was filtering the high-frequency component of the incident stress wave via the pulse shaping technique.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Peng, F.Y.; Wang, Y.S.; Chen, M.W.; Hu, Z.; Miao, Y.G. Compression behavior of extra-soft porcine lung tissue at the wide strain rate. J. Phys. Conf. Ser. 2023, 2535, 012031. [Google Scholar] [CrossRef]
- Zhang, J.X.; Miao, Y.G.; Qin, Q.H.; Lu, T.Q.; Ye, Y.; He, H.; Wang, J.K.; Li, H. Static and dynamic experiments on hydrogels effects of the chemical composition of the fluid. Mech. Mater. 2021, 154, 103717. [Google Scholar] [CrossRef]
- Miao, Y.G.; Zhang, H.N.; He, H.; Deng, Q. Mechanical behaviors and equivalent configuration of a polyurea under wide strain rate range. Compos. Struct. 2019, 222, 110923. [Google Scholar] [CrossRef]
- Miao, Y.G.; He, H.; Li, Z.H. Strain hardening behaviors and mechanisms of polyurethane under various strain rate loading. Polym. Eng. Sci. 2020, 60, 10831092. [Google Scholar] [CrossRef]
- Bendarma, A.; Jankowiak, T.; Rusinek, A.; Lodygowski, T.; Czarnota, C.; Bernier, R.; Khalfaoui, M. Experimental and numerical analysis of Aluminum-Polyethylene composite structure subjected to tension and perforation under dynamic loading for a wide range of temperatures. J. Dyna Behav. Mat. 2023, 10, 51–74. [Google Scholar] [CrossRef]
- Xu, P.D.; Tang, L.Q.; Zhang, Y.R.; Ni, P.; Liu, Z.J.; Jiang, Z.Y.; Liu, Y.P.; Zhou, L.C. SHPB experimental method for ultra-soft materials in solution environment. Int. J. Impact Eng. 2022, 159, 104051. [Google Scholar] [CrossRef]
- Song, B.; Chen, W.W.; Yun, G.; Weerasooriya, T. Dynamic and quasi-static compressive response of porcine muscle. J. Biomech. 2007, 40, 2999–3005. [Google Scholar] [CrossRef] [PubMed]
- Miao, Y.G.; Li, Y.L.; Deng, Q.; Tang, Z.B.; Hu, H.T.; Suo, T. Investigation on experimental method of low-impedance materials using modified Hopkinson pressure bar. J. Beijing Inst. Technol. 2015, 2, 269–276. [Google Scholar]
- Miao, Y.G.; Li, Y.L.; Liu, H.Y.; Deng, Q.; Shen, L.; Mai, Y.W.; Guo, Y.Z.; Suo, T.; Hu, H.T.; Xie, F.Q. Determination of dynamic elastic modulus of polymeric materials using vertical split Hopkinson pressure bar. Int. J. Mech. Sci. 2016, 108–109, 188–196. [Google Scholar] [CrossRef]
- Chen, W.W. Experimental Methods for Characterizing Dynamic Response of Soft Materials. J. Dyna Behav. Mat. 2016, 2, 2–14. [Google Scholar] [CrossRef]
- Chen, S.P.; Chi, R.Q.; Cao, W.X.; Pang, B.J.; Chao, Z.L.; Jiang, L.T.; Luo, T.; Zhang, R.W. Pulse design of constant strain rate loading in SHPB based on pulse shaping technique. Materials 2024, 17, 2931. [Google Scholar] [CrossRef] [PubMed]
- Pervin, F.; Chen, W.W.; Weerasooriya, T. Dynamic compressive response of bovine liver tissues. J. Mech. Behav. Biomed. Mater. 2011, 4, 76–84. [Google Scholar] [CrossRef]
- Miao, Y.G. On loading ceramic-like materials using split Hopkinson pressure bar. Acta Mech. 2018, 229, 3437–3452. [Google Scholar] [CrossRef]
- Miao, Y.G.; Du, B.; Ma, C.B.; Hu, H.T.; Deng, Q. Some fundamental problems concerning the measurement accuracy of the Hopkinson tension bar technique. Meas. Sci. Technol. 2019, 30, 055099. [Google Scholar] [CrossRef]
- Guo, L.; Lv, Y.; Deng, Z.; Wang, Y.; Zan, X. Tension testing of silicone rubber at high strain rates. Polym. Test. 2016, 50, 270–275. [Google Scholar] [CrossRef]
- Song, B.; Chen, W.W. Dynamic stress equilibration in split Hopkinson pressure tests on soft materials. Exp. Mech. 2004, 44L, 300–312. [Google Scholar] [CrossRef]
- Liu, F.; Li, Q.M. Strain-rate effect of polymers and correction methodology in a SHPB test. Int. J. Impact Eng. 2022, 161, 104109. [Google Scholar] [CrossRef]
- Kapil, B.B.; Austin, A.; Simon, O.; Sikhanda, S.; Christopher, R.D.; James, D.H. High Rate Compressive Behaviour of a Dilatant Polymeric Foam. J. Dyna Behav. Mat. 2018, 4, 573–585. [Google Scholar]
- Wen, Y.; Zhang, T.; Yan, W.; Chen, Y.; Wang, G. Mechanical response of porcine hind leg muscles under dynamic tensile loading. J. Mech. Behav. Biomed. Mater. 2021, 115, 104279. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.; Hong, J.; Chen, W.W.; Weerasooriya, T. Mechanical response of pig skin under dynamic tensile loading. Int. J. Impact Eng. 2011, 38, 130–135. [Google Scholar] [CrossRef]
- Song, B.; Chen, W.W.; Weerasooriya, T. Experimental Investigation of Radial Inertia Effects in Hopkinson Bar Testing of Extra-soft Materials. In Proceedings of the 2006 SEM Annual Conference & Exposition on Experimental & Applied Mechanics, Saint Louis, MO, USA, 4–7 June 2006; pp. 311–313. [Google Scholar]
- Gao, C.; Iwamoto, T.; Kusaka, T. A DIC-based Talylor impact test by measuring inertia force from acceleration distribution to obtain uniaxial stress-strain behavior of pure aluminum. Int. J. Impact Eng. 2024, 184, 104834. [Google Scholar] [CrossRef]
- Sanborn, B.; Nie, X.; Chen, W.W.; Weerasooriya, T. Inertia effects on characterization of dynamic response of brain tissue. J. Biomech. 2012, 45, 434–439. [Google Scholar] [CrossRef] [PubMed]
- Koohbor, B.; Singh, N.K.; Kidane, A. Radial and Axial Inertia Stresses in High Strain Rate Deformation of Polymer Foams. Int. J. Mech. Sci. 2020, 181, 105679. [Google Scholar] [CrossRef]
- Kolsky, H. An investigation of the mechanical properties of materials at very high rates of loading. Proc. R. Soc. Lond. 1949, 62, 679–700. [Google Scholar] [CrossRef]
- Davies, E.; Hunter, S.C. The dynamic compression testing of solids by the method of the split Hopkinson pressure bar. Mech. Phys. Solids 1963, 11, 155–179. [Google Scholar] [CrossRef]
- Pervin, F.; Chen, W.W. Dynamic mechanical response of bovine gray matter and white matter brain tissues under compression. J. Biomech. 2009, 42, 731–735. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.W.; Song, B. Split Hopkinson (Kolsky) Bar: Design, Testing and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Liu, Y.; Deng, Q.; Wang, Y.S.; Zhang, C.X.; Chen, M.W.; Hu, Z.; Miao, Y.G. Dynamic mechanical response and functional mechanisms in rabbit pulmonary tissue. Mech. Time-Depend. Mat. 2024, 1–16. [Google Scholar] [CrossRef]
- Padilla, H.A.; Boyce, B.L.; Battaile, C.C.; Prasad, S.V. Frictional performance and near-surface evolution of nanocrystalline Ni-Fe as governed by contact stress and sliding velocity. Wear 2013, 297, 860–871. [Google Scholar] [CrossRef]
- Lin, Y.L.; Qin, J.G.; Lu, F.Y.; Chen, R.; Li, X.Y. Dynamic friction coefficient of two plastics against aluminum under impact loading. Tribol. Int. 2014, 79, 26–31. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inner Diameter (mm) | Outer Diameter (mm) | Length (mm) | Density (kg/m3) | Poisson’s Ratio | Strain Rate Differential (s−2) | Elements Types |
|---|---|---|---|---|---|---|
| 0 1 2 3 4 5 | 10 | 2 | 275 550 1100 | 0.2 0.3 0.4 0.49 | 0.7 × 108 1.3 × 108 2.5 × 108 | 4-node bilinear CAZ4R |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Wang, Y.; Deng, Q. Radial Inertia Effect of Ultra-Soft Materials from Hopkinson Bar and Solution Methodologies. Materials 2024, 17, 3793. https://doi.org/10.3390/ma17153793
Liu Y, Wang Y, Deng Q. Radial Inertia Effect of Ultra-Soft Materials from Hopkinson Bar and Solution Methodologies. Materials. 2024; 17(15):3793. https://doi.org/10.3390/ma17153793
Chicago/Turabian StyleLiu, Yue, Yongshuai Wang, and Qiong Deng. 2024. "Radial Inertia Effect of Ultra-Soft Materials from Hopkinson Bar and Solution Methodologies" Materials 17, no. 15: 3793. https://doi.org/10.3390/ma17153793