

Dynamics in Explicit Gradient Elasticity: Material Frame-Indifference, Boundary Conditions and Consistent Euler–Bernoulli Beam Theory

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Relations
2.1. Extensions of Hamilton’s Variational Principle
2.2. Material Frame-Indifference
2.3. A Simple Model of Explicit Gradient Elasticity
3. Gradient Elasticity in the Setting of Hamilton’s Principle
3.1. Variational Formulation of the Field Equations
3.2. Gradient Elasticity with Acceleration Terms Present in the Boundary Conditions
3.3. Gradient Elasticity without Acceleration Terms Present in the Boundary Conditions
4. Consistent Euler–Bernoulli Beam Theory in Dynamics
4.1. Main Assumptions
4.2. Variational Methods of Gradient Elastic Euler-Bernoulli Beams
4.2.1. Hamilton’s Principle for the Case Where Acceleration Terms Are Present in the Traction Boundary Conditions
Approach Based on Hamilton’s Principle Equation (40)
Approach Based on the Balance of Linear Momentum for the Beam
4.2.2. Hamilton’s Principle for the Case Where Acceleration Terms Are Not Present in the Traction Boundary Conditions
5. Examples
5.1. Uniaxial Tension/Compression Loading
5.1.1. Governing Equations
5.1.2. Force Controlled Loading
5.1.3. Displacement Controlled Loading
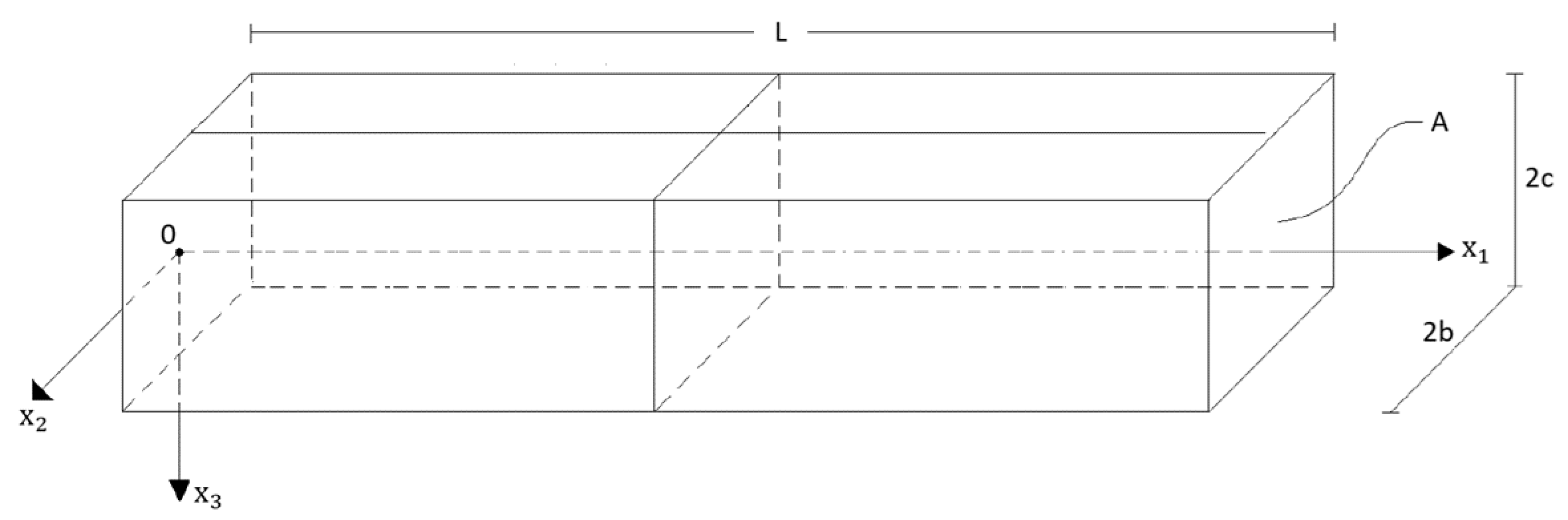
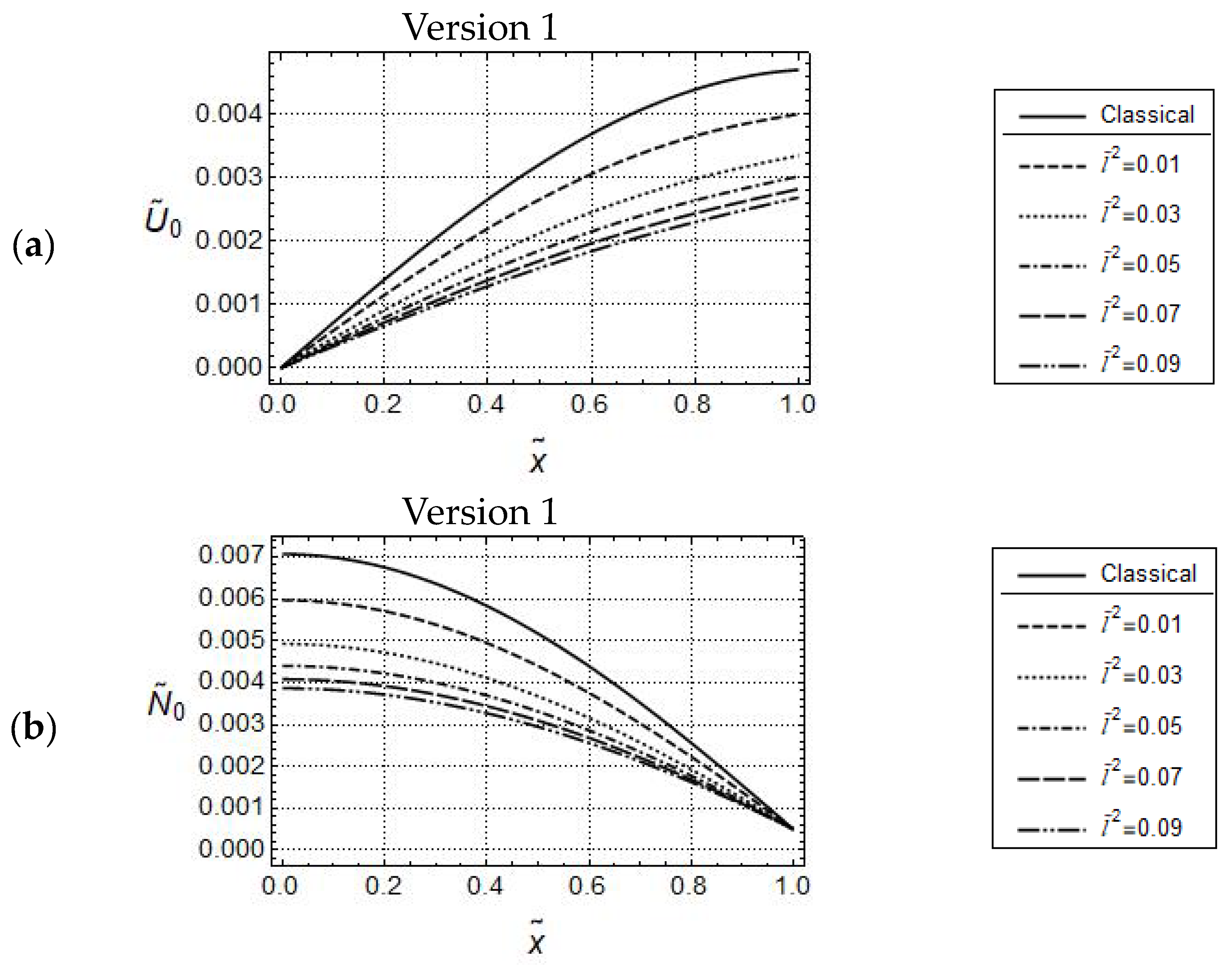
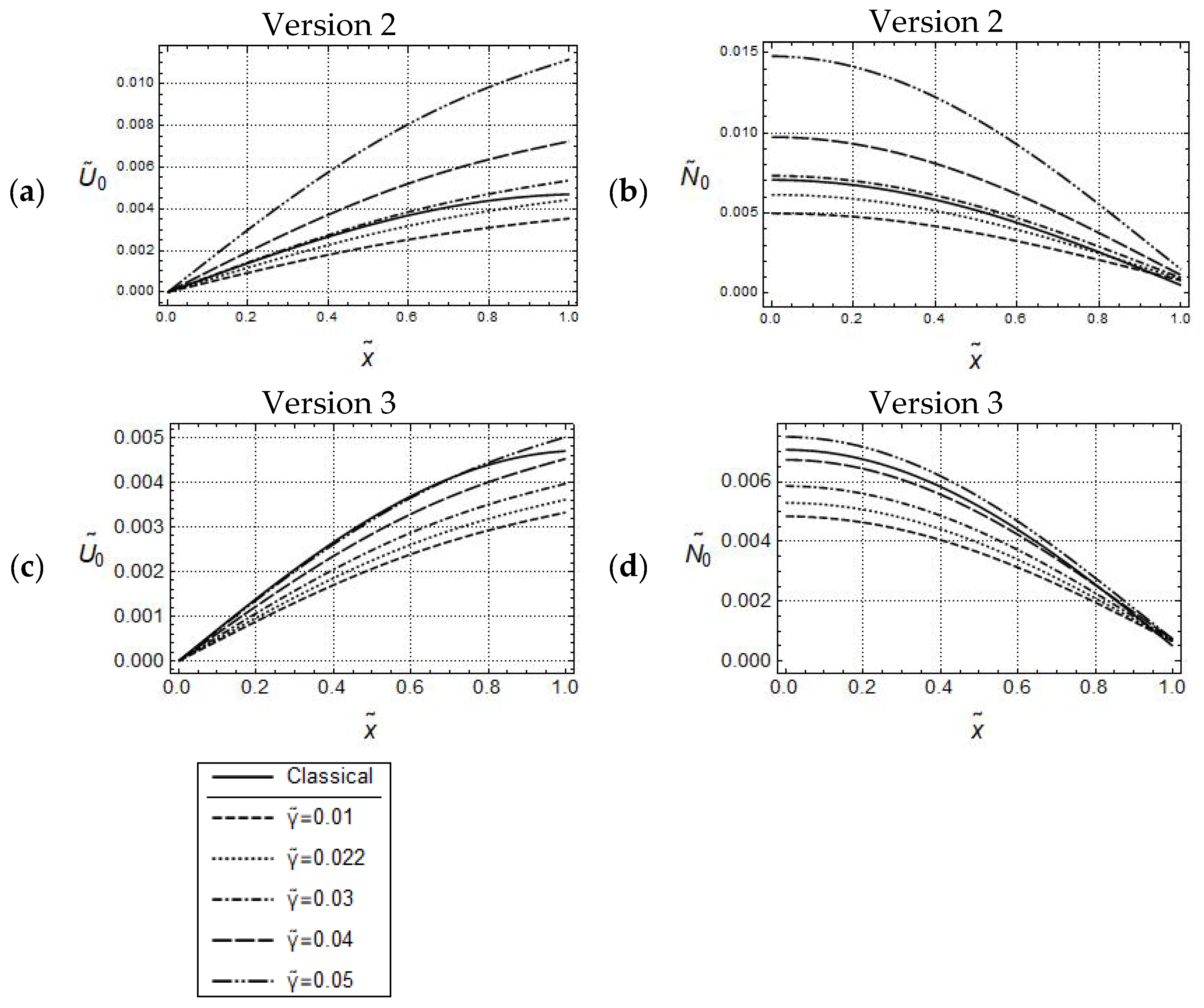
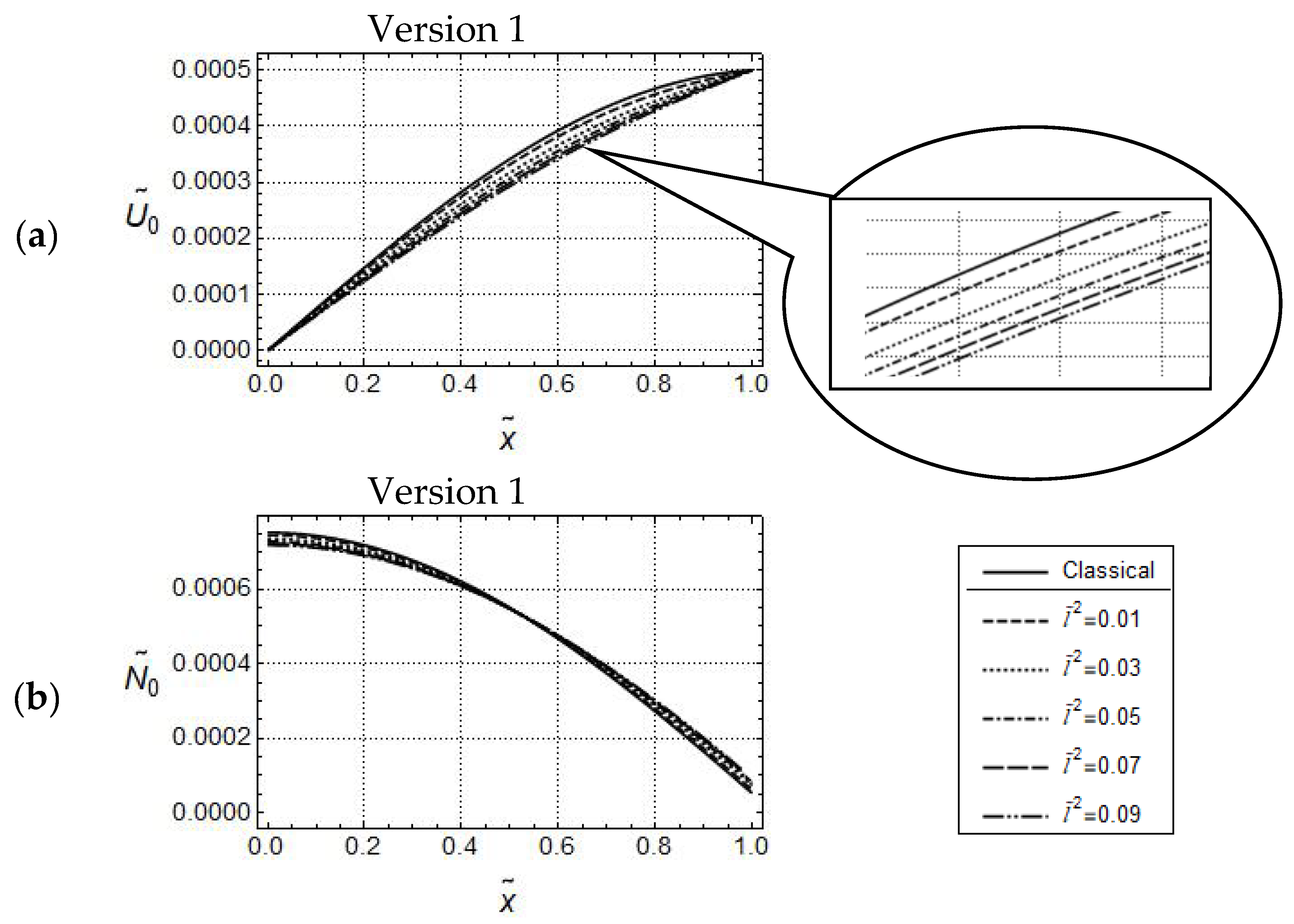
5.2. Cantilever Beam under Dynamical Transverse Load
5.2.1. Governing Equations
5.2.2. Force Controlled Bending
5.2.3. Deflection Controlled Bending
6. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Askes, H.; Aifantis, E.C. Gradient elasticity in statics and dynamics: An overview of formulations, length scale identification procedures, finite element implementations and new results. Int. J. Solids Struct. 2011, 48, 1962–1990. [Google Scholar] [CrossRef]
- Russo, R.; Girot Mata, F.A.; Forest, S.; Jacquin, D. A review on strain gradient plasticity approaches in simulation of manufacturing processes. J. Manuf. Mater. Process. 2020, 4, 87. [Google Scholar] [CrossRef]
- Zhuang, X.; Zhou, S.; Huynh, G.D.; Areias, P.; Rabczuk, T. Phase field modeling and computer implementation: A review. Eng. Fract. Mech. 2022, 262, 108234. [Google Scholar] [CrossRef]
- Dunn, J.; Serrin, J. On the thermodynamics of interstitial working. Arch. Ration. Mech. Anal. 1988, 88, 95–133. [Google Scholar] [CrossRef]
- Eringen, A.C. Theory of Micropolar Elasticity; Springer: New York, NY, USA, 1999. [Google Scholar]
- Eringen, A.C. Microcontinuum Field Theories: I. Foundations and Solids; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Mindlin, R.D. Microstructure in linear elasticity. Arch. Ration. Mech. Anal. 1964, 16, 51–78. [Google Scholar] [CrossRef]
- Toupin, R. Elastic materials with couple-stresses. Arch. Ration. Mech. Anal. 1962, 11, 385–414. [Google Scholar] [CrossRef]
- Lam, D.C.; Yang, F.; Chong, A.C.; Wang, J.; Tong, P. Experiments and theory in strain gradient elasticity. J. Mech. Phys. Solids 2003, 51, 1477–1508. [Google Scholar] [CrossRef]
- Lei, J.; He, Y.; Guo, S.; Li, Z.; Liu, D. Size-dependent vibration of nickel cantilever microbeams: Experiment and gradient elasticity. AIP Adv. 2016, 6, 105202. [Google Scholar] [CrossRef]
- dell’Isola, F.; Seppecher, P.; Spagnuolo, M.; Barchiesi, E.; Hild, F.; Lekszycki, T.; Giorgio, I.; Placidi, L.; Andreaus, U.; Cuomo, M.; et al. Advances in pantographic structures: Design, manufacturing, models, experiments and image analyses. Contin. Mech. Thermodyn. 2019, 31, 1231–1282. [Google Scholar] [CrossRef]
- De Domenico, D.; Askes, H.; Aifantis, E.C. Capturing wave dispersion in heterogeneous and microstructured materials through a three-length-scale gradient elasticity formulation. J. Mech. Behav. Mater. 2018, 27, 20182002. [Google Scholar] [CrossRef]
- Chakraborty, A. Prediction of negative dispersion by a nonlocal poroelastic theory. J. Acoust. Soc. Am. 2008, 123, 56–67. [Google Scholar] [CrossRef] [PubMed]
- Tong, L.; Yu, Y.; Hu, W.; Shi, Y.; Xu, C. On wave propagation characteristics in fluid saturated porous materials by a nonlocal Biot theory. J. Sound Vib. 2016, 379, 106–118. [Google Scholar] [CrossRef]
- Broese, C.; Tsakmakis, C.; Beskos, D. Mindlin’s micro-structural and gradient elasticity theories and their thermodynamics. J. Elast. 2016, 125, 87–132, Erratum in J. Elast. 2016, 125, 133–136. [Google Scholar] [CrossRef]
- Bedford, A. Hamilton’s Principle in Continuum Mechanics; Pitman Advanced Publishing Program; Springer Nature: Boston, MA, USA; London, UK; Melbourne, Australia, 1985. [Google Scholar]
- Gurtin, M.E.; Fried, E.; Anand, L. The Mechanics and Thermodynamics of Continua; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Liu, I.S. Constitutive theories: Basic principles. In Encyclopedia of Life Support Systems (EOLSS); Continuum Mechanics; United Nations Educational, Scientific and Cultural Organization: London, UK, 2009; Volume 1, p. 198. [Google Scholar]
- Liu, I.S.; Sampaio, R. On objectivity and the principle of material frame-indifference. Mec. Comput. 2012, 31, 1553–1569. [Google Scholar] [CrossRef]
- Leigh, D.C. Nonlinear Continuum Mechanics: An Introduction to the Continuum Physics and Mathematical Theory of the Nonlinear Mechanical Behavior of Materials; McGraw-Hill: New York, NY, USA, 1968. [Google Scholar]
- Altan, B.S.; Aifantis, E.C. On some aspects in the special theory of gradient elasticity. J. Mech. Behav. Mater. 1997, 8, 231–282. [Google Scholar] [CrossRef]
- Broese, C.; Tsakmakis, C.; Beskos, D. Gradient elasticity based on Laplacians of stress and strain. J. Elast. 2018, 131, 39–74. [Google Scholar] [CrossRef]
- Bauchau, O.A.; Craig, J.I. Structural Analysis: With Applications to Aerospace Structures; Springer Science & Business Media: New York, NY, USA, 2009. [Google Scholar]
- Sideris, S.A.; Tsakmakis, C. Consistent Euler–Bernoulli beam theories in statics for classical and explicit gradient elasticities. Compos. Struct. 2022, 282, 115026. [Google Scholar] [CrossRef]
- Bröse, C.; Sideris, S.A.; Tsakmakis, C.; Üngör, Ö. Equivalent Formulations of Euler–Bernoulli Beam Theory for a Simple Gradient Elasticity Law. J. Eng. Mech. 2023, 149, 04022081. [Google Scholar] [CrossRef]
- Lazopoulos, K.A.; Lazopoulos, A.K. Bending and buckling of thin strain gradient elastic beams. Eur. J. Mech. A Solids 2010, 29, 837–843. [Google Scholar] [CrossRef]
- Papargyri-Beskou, S.; Tsepoura, K.G.; Polyzos, D.; Beskos, D. Bending and stability analysis of gradient elastic beams. Int. J. Solids Struct. 2003, 40, 385–400. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsakmakis, C.; Broese, C.; Sideris, S.A. Dynamics in Explicit Gradient Elasticity: Material Frame-Indifference, Boundary Conditions and Consistent Euler–Bernoulli Beam Theory. Materials 2024, 17, 1760. https://doi.org/10.3390/ma17081760
Tsakmakis C, Broese C, Sideris SA. Dynamics in Explicit Gradient Elasticity: Material Frame-Indifference, Boundary Conditions and Consistent Euler–Bernoulli Beam Theory. Materials. 2024; 17(8):1760. https://doi.org/10.3390/ma17081760
Chicago/Turabian StyleTsakmakis, Charalampos, Carsten Broese, and Stergios Alexandros Sideris. 2024. "Dynamics in Explicit Gradient Elasticity: Material Frame-Indifference, Boundary Conditions and Consistent Euler–Bernoulli Beam Theory" Materials 17, no. 8: 1760. https://doi.org/10.3390/ma17081760