1. Introduction
A multi-linkage robot is a linkage mechanism composed of multiple movable joints connecting rigid rods in series [
1,
2]. It has the advantages of large range of working space, high flexibility, simple mechanical structure, good obstacle avoidance performance, and better avoidance of singularity of mechanism. They are widely used in medical surgery, underwater detection, construction, and many other engineering fields.
The fact shows that dimensional synthesis for multi-linkage robots has been paid much attention by scholars. Gosselin proposed a global condition index (GCI) that combines the working space and the Jacobian condition number to design the structure size of multi-linkage robots [
3]. Based on the optimization goal of the subjective minimum robot criterion, Amir optimized the robot size with the Lagrange multiplier method [
4]. José-Alfredo et al. used the means of a multi-objective optimization to carry out dimensional synthesis of a spherical parallel manipulator, the method of multi-objective evolutionary algorithm based on decomposition (MOEA/D) was proposed, objective functions were the dexterity, the variability of the dexterity, the maximum required torque, and the stiffness. The optimization of robots’ workspace was performed using non-dominated sorting genetic algorithm- II (NSGA-II), multi-objective particle swarm optimization algorithm (OMOPSO), MOEA/D separately, the results showed better performance of MOEA/D algorithm [
5]. Ramon et al. obtained the best linkage by means of hybridizing a local search (LS) approach and an evolutionary algorithm (EA). Hybrid optimization strategy was selected by cluster and elite analyses, for the design of planar linkages, the best options were highlighted [
6]. In [
7], attitude maneuverability was used to optimize the links. The maneuverability as objective function designed robot parameters in [
8]. In [
9], the workspace distance, stiffness performance, and velocity fluctuation were taken as the standards, the link lengths were designed and optimized for service robots. In [
10], link length optimization of 3R linkage robot was done based on the range that the end-effector reached. In [
11], the method, which took the distribution area of workspace density function maximum value as the standard, was proposed for dimension design. In the literature [
3,
4,
5,
6,
7,
8,
9,
10,
11], one or more algorithms and theories are used to design the size of multi-linkage robots with a single target or several targets as the optimized objective function. The reliability and superiority of the method are verified by means of software and simulation. However, whether the new method can achieve better results in the practical application has not been further studied, and its application value remains to be verified.
In [
12], a ‘magic hand’ robot was developed on the basis of study regarding dimension synthesis, manipulators can complete the surgery basic operation and can replace an attending doctor. In [
13], the structure size was solved by least squares in the view of energy consumption analysis, effectiveness was verified by means of KUKA robot. In [
14], the size of collaborative space volume was quantified by the number of space cloud points, mechanical dimensional of the robot arm was were optimized aimed as maximum of collaborative space volume. In [
15], the leg structure parameters of quadruped robot were analyzed based on the dynamic dimensional synthesis. In [
16], the robot dimensional parameters, which combined with the signal-to-noise ratio (SNR) theory and Taguchi technology, were determined by taking the maximum SNR as the optimization object. In [
17], the design of parameters was divided into three levels, it was verified that shortened the design cycle and difficulty and improved the design efficiency for industrial robots. In [
18], bionics theory was cited to design the parameters of the crawling robot, which had high reliability, low cost, and good flexibility. In [
19], in order to improve the load-capacity of the mechanical arm, the method employing workbench goal-driven methodology optimized analysis was adopted, reducing the arms weight and increasing the load of the manipulator. In [
20], structural parameters of the bionic rescue robot were optimized based on genetic algorithm. In the literature [
12,
13,
14,
15,
16,
17,
18,
19,
20], for the dimensional synthesis of multi-linkage robots in different application situations, the effectiveness of the methods is verified respectively, and good performance of multi-linkage robots is obtained. However, the universality of these methods in other situations needs to be further verified.
For complex scenes or high flexibility requirements, the methods proposed in these studies have problems such as tedious solution expression, large amount of calculation, and poor rationality of multi group solution verification. Although the design method in the reference [
17] is concise, which improves the design efficiency and shortens the design time. However, the energy consumption factor in the motion of multi-linkage robots was not included as the objective function in these studies, and the research on the joint angle of the robot was also not involved. Therefore, it is necessary to design multi-linkage robots with high flexibility and low energy consumption in order to improve computing efficiency and accuracy.
Kinematical theory, workspace density function [
21], genetic algorithm [
22,
23,
24,
25], and multi-objective algorithm theory had been fully researched before. In this paper, we set the density function, maneuverability [
26,
27,
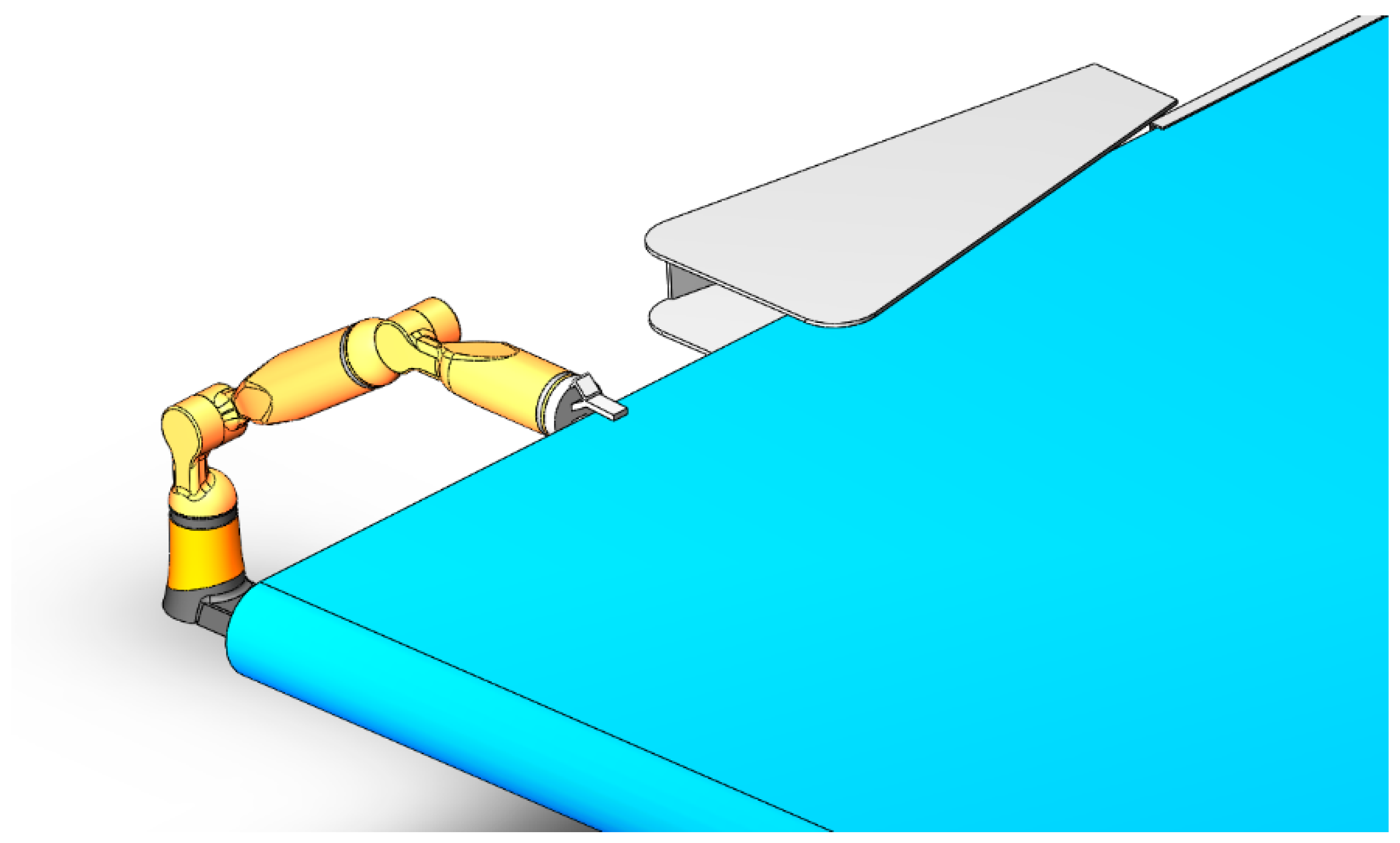
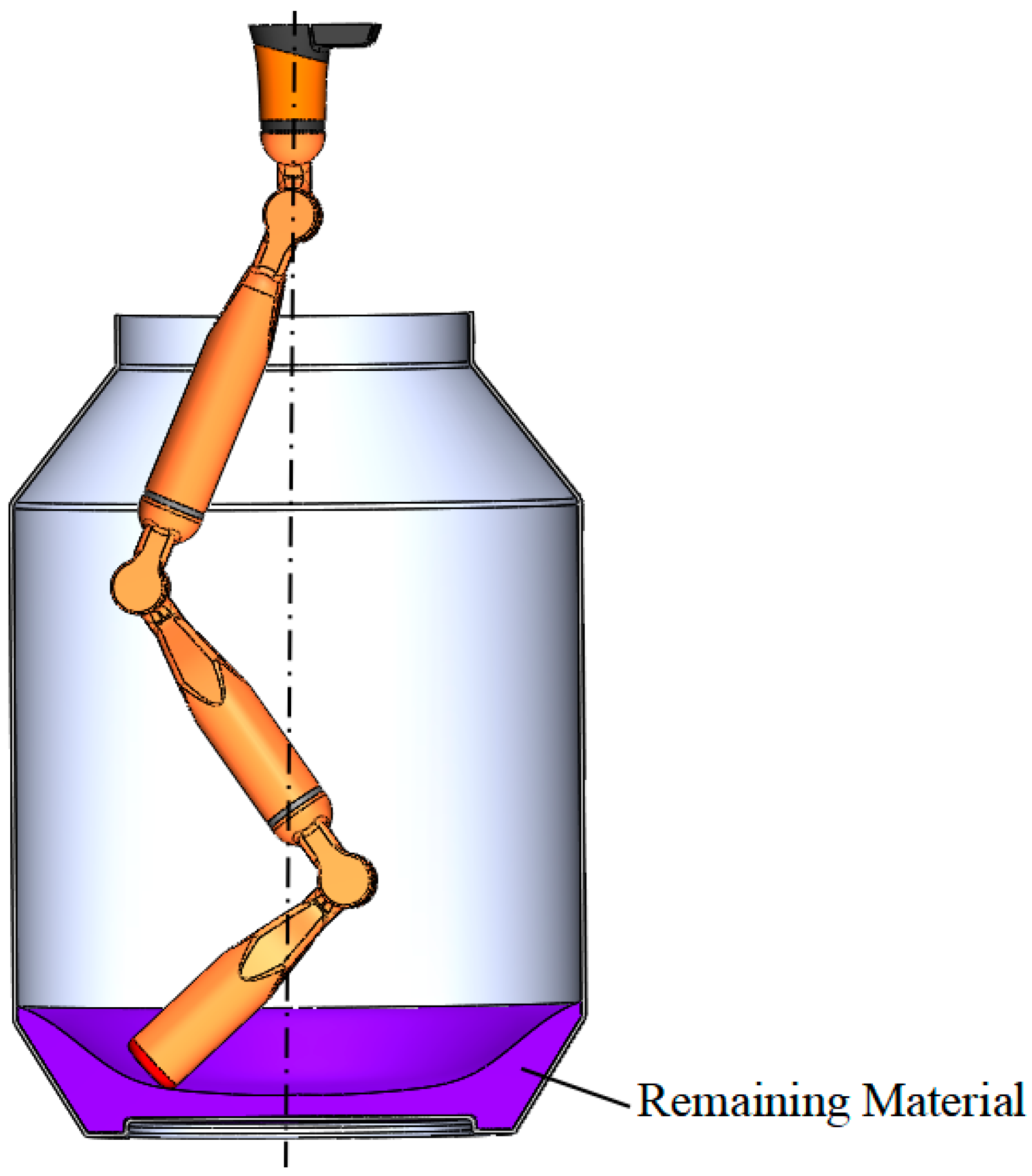
28], and energy expenditure as objective functions. Multi-link robots have high flexibility and low energy consumption, which can meet the application requirements under special circumstances. In order to guide the design of multi-link robots, we proposed a design method of multi-linkage robots’ dimensions and joint angles based on the niched Pareto genetic algorithm, shorted as NPGA. Apply proposed method to actual scenes, which are retracting and releasing shielding cloth of salt evaporating pool and separation of the remaining solid 2,2′-azobis(2,4-dimethylvaleronitrile) (shorted ADVN) from the barrel. The multiple dimensions and joint angles of the 2R and 3R link robots were obtained, which verified the reliability of the method. The method provides new ideas and methods for the dimensional synthesis of multi-linkages robots.
The rest of the paper is organized as follows. In
Section 2, three objective functions are researched by calculating appropriate cases, then the relevant calculation formula are derived. In
Section 3, the parameters and design process of NPGA are determined. In
Section 4, the mathematical model of operation is established. In
Section 5, two application examples of parameter synthesis are given to verify the proposed method. Finally, we present our conclusions in
Section 6.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}