
Self-Adaptive Path Tracking Control for Mobile Robots under Slippage Conditions Based on an RBF Neural Network

Abstract
:1. Introduction
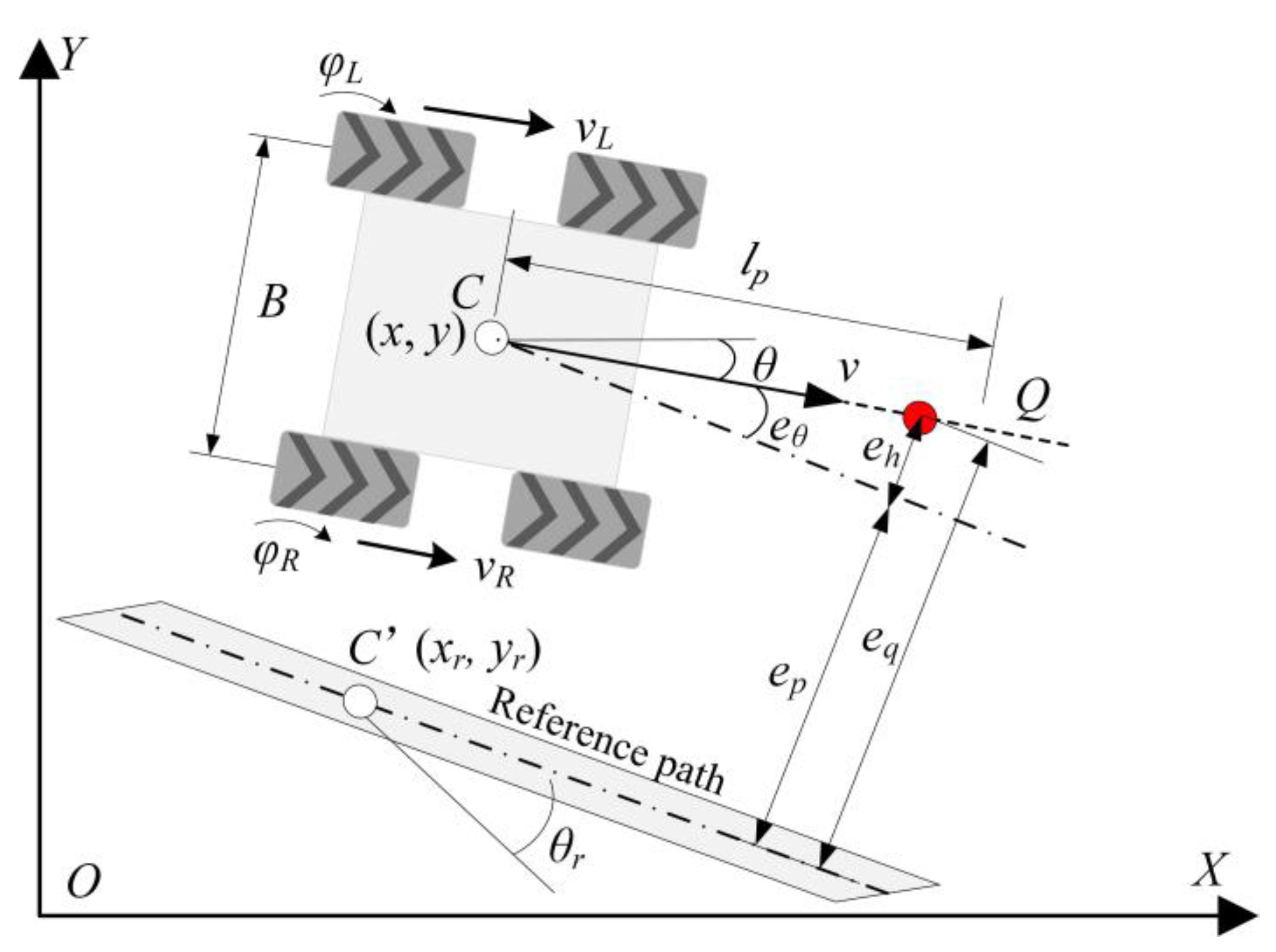
- An equivalent error integrating position and orientation errors, and taking account of the preview distance is employed for the development of path tracking control to achieve both a lower position error and a steady posture.
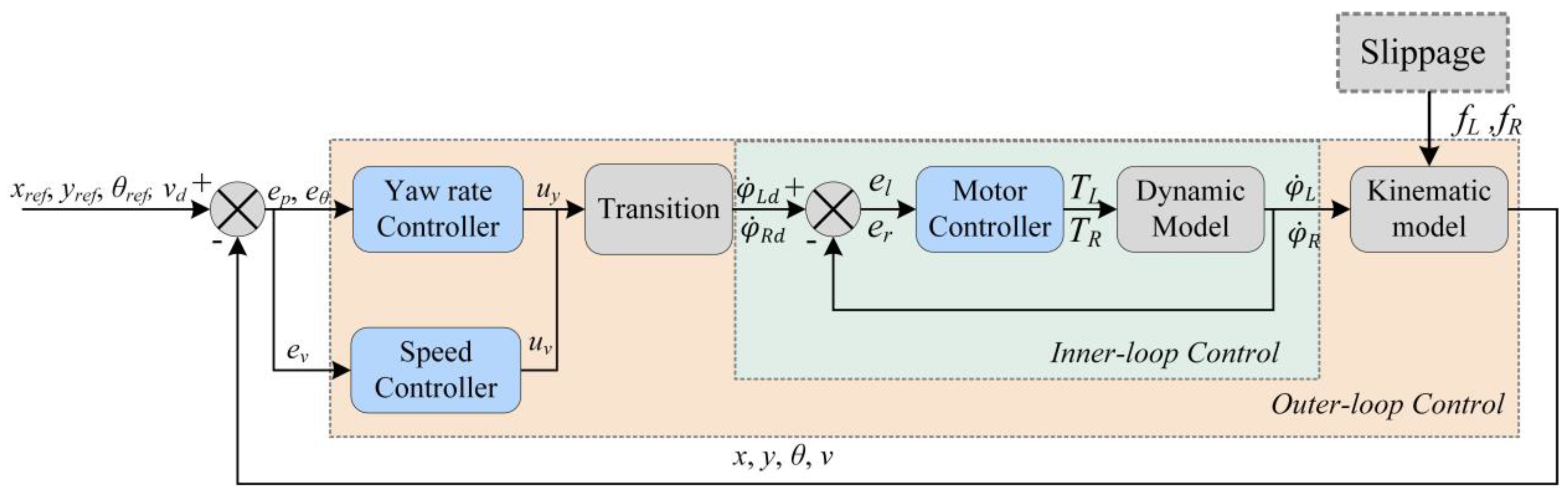
- A dual-loop control framework that integrates kinematic and dynamic models in the inner and outer loops, respectively, is proposed. A decoupled control method including a yaw rate controller and a speed controller is utilized to achieve the tracking target of a reference path with a desired speed.
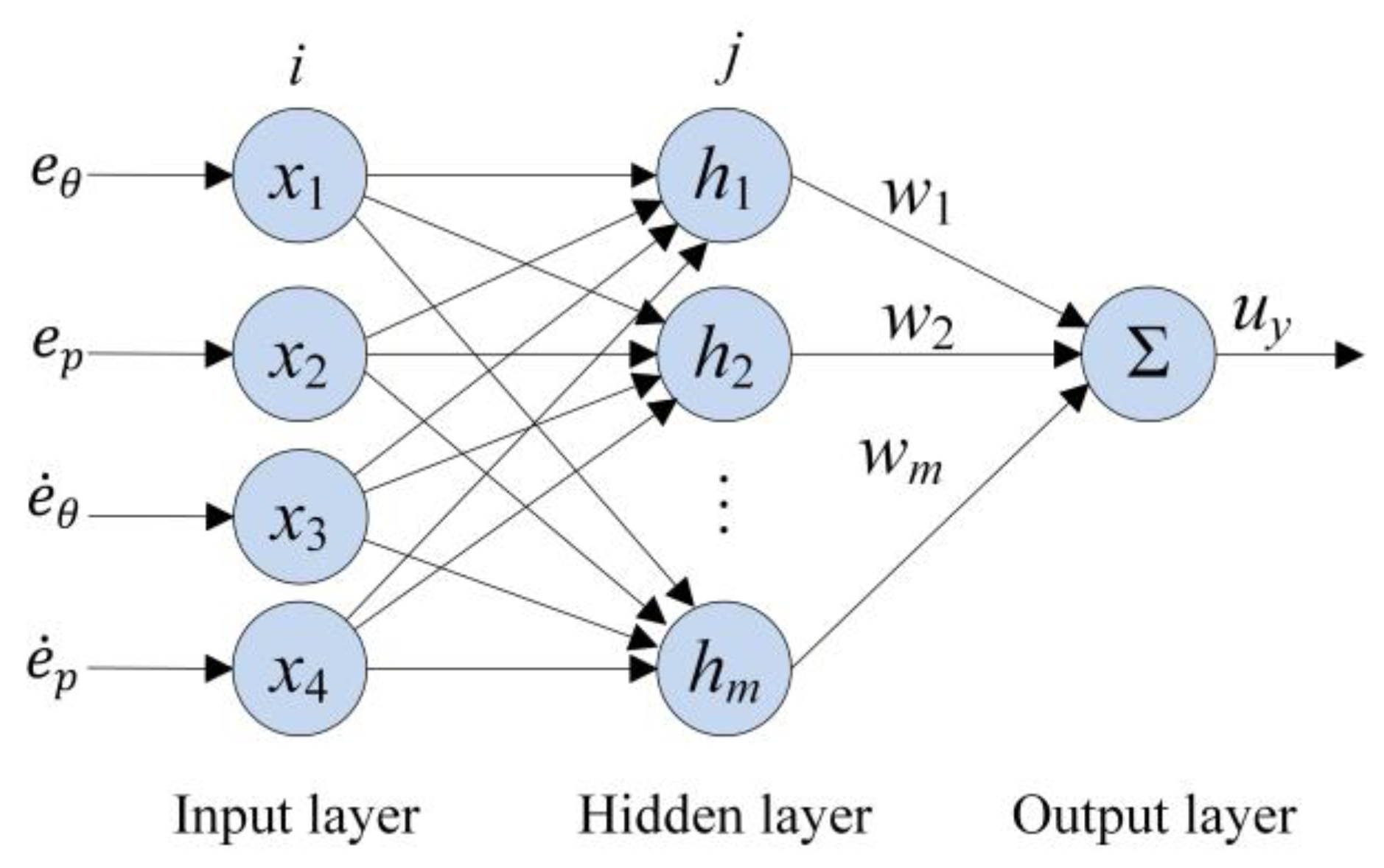
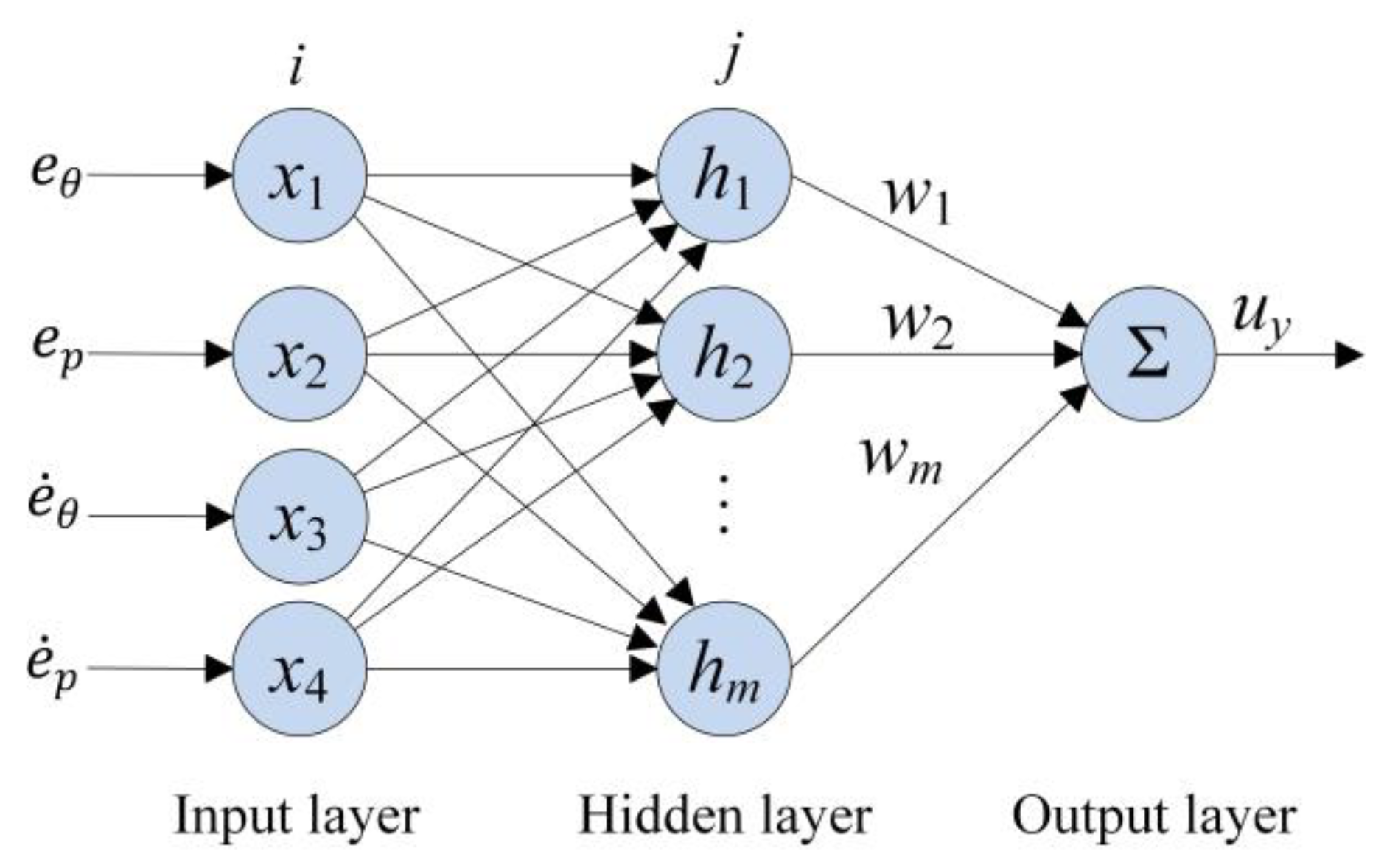
- An RBF neural network is employed for yaw rate control to realize adaptability to longitudinal slipping and skidding caused by complex terrain.
2. Kinematic and Dynamic Models
2.1. Kinematic Model
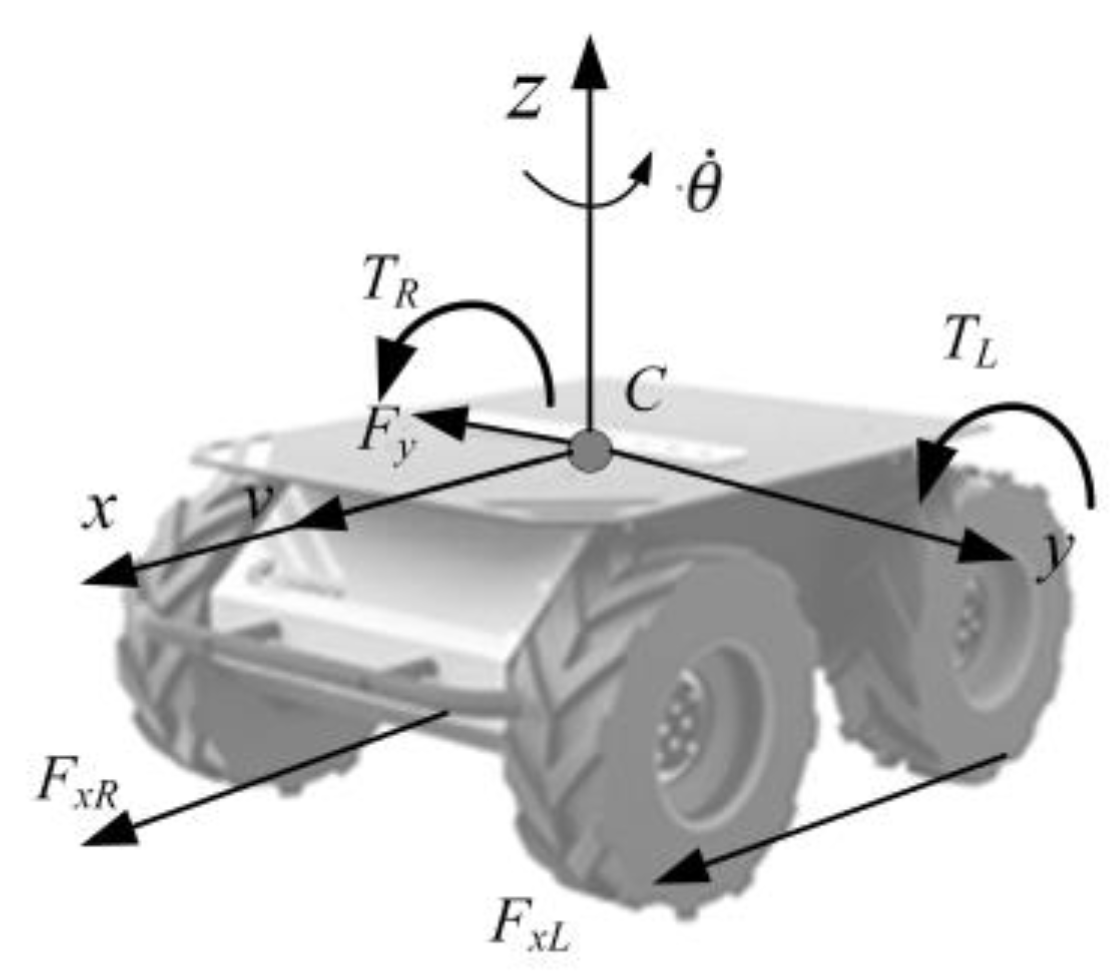
2.2. Dynamic Model
3. Path Tracking Controller
| Algorithm 1 Self-adaptive path tracking control algorithm based on RBF neural network | ||
| Input: p = {, , , }; | ||
| Output: O = {x, , , }; | ||
| 1: | while t < tmax | |
| 2: | //outer-loop control algorithm | |
| 3: | (t) ← Error((t), (t), (t), (t)); | //Compute error |
| 4: | [(t); (t)] ← Error([(t), (t)]; [(t), (t)]); | |
| 5: | (t) ← Speedcontroller((t)); | //PID control algorithm (Equation (15)) |
| 6: | The yaw rate controller input x(t) = {(t), (t), (t), (t)}; | |
| 7: | if t = 0 then | |
| 8: | Initialize matrix w(t), b(t) and c(t); | |
| 9: | else | |
| 10: | h(t) ← Hiddenlayer(x(t), b(t), c(t)); | //Compute hidden layer output matrix (Equation (18)) |
| 11: | (t) ← RBFoutput(w(t), h(t)); | //Equation (19) |
| 12: | Update matrix w(t + 1), b(t + 1) and c(t + 1); | //Equations (21) and (23) |
| 13: | end if | |
| 14: | [(t), (t)] ← Transition((t), (t)); | //The desired angular velocity |
| 15: | //Inner-loop control algorithm | |
| 16: | [(t); (t)] ← Error([(t), (t)]; [(t), (t)]); | |
| 17: | [(t); (t)] ← Motorcontroller([(t); (t)]); | //PID control algorithm (Equation (16)) |
| 18: | [(t + 1); (t + 1)] ← Dynamicmodel([(t); (t)]), and feedback to step 16 of the t + 1 moment; | |
| 19: | //Inner-loop control closure | |
| 20: | O(t + 1) ← Kinematicmodel((t + 1), (t + 1), (t + 1), (t + 1)), and feedback to step 3–4 of the t + 1 moment; | |
| 21: | t ← t + 1; | |
| 22: | //Outer-loop control closure | |
| 23: | end while | |
| 24: | returnO; | |
3.1. Speed and Motor Control
- Firstly, the proportional coefficient is tuned. The initial value can be calculated quantitatively, and the different values from both sides of the initial value can be taken. The final proportional coefficient can be determined when the system has a relatively fast response speed.
- Secondly, the integral coefficient is tuned. The time for the system to reach stability is tested when the value is 0–1, and the integral coefficient can be determined when the time is relatively short.
- Thirdly, the differential coefficient is tuned. The differential coefficient, which is 0–1, can be determined when the system is relatively stable.
3.2. Yaw Rate Control
4. Results and Discussion
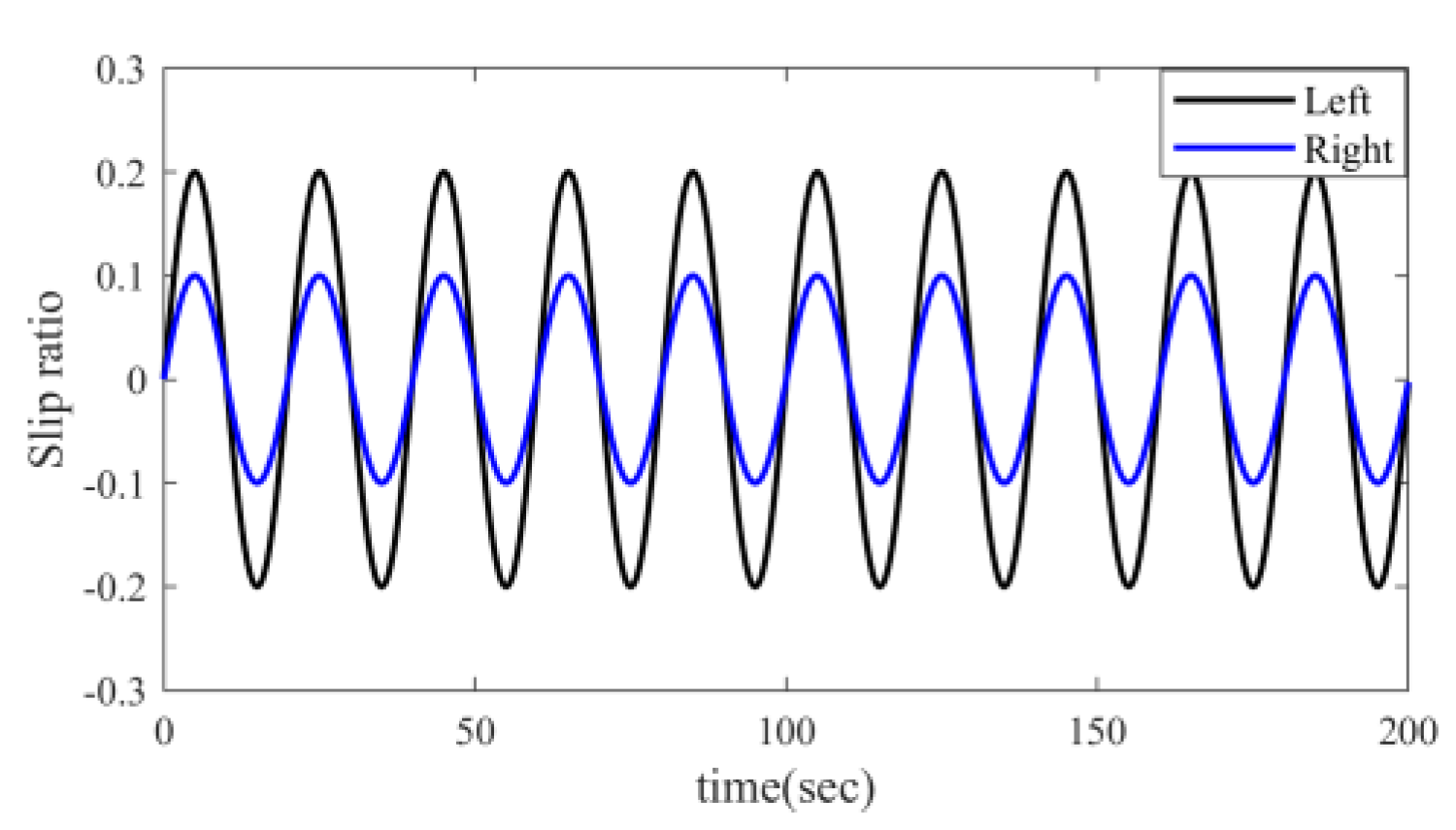
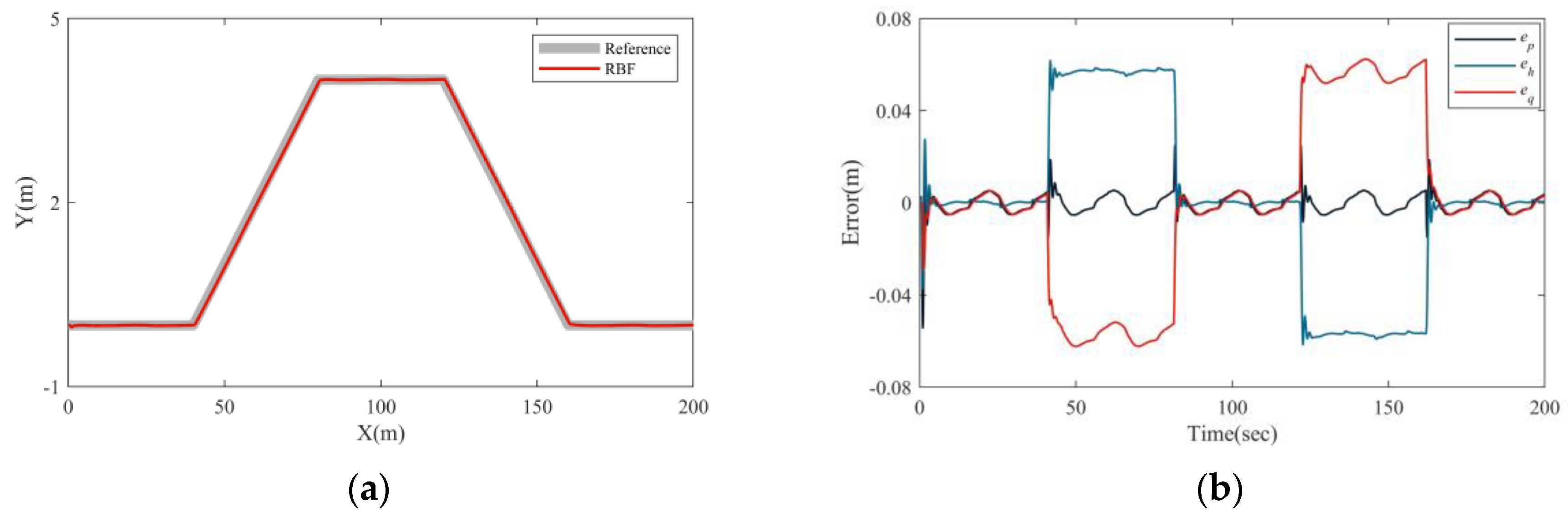
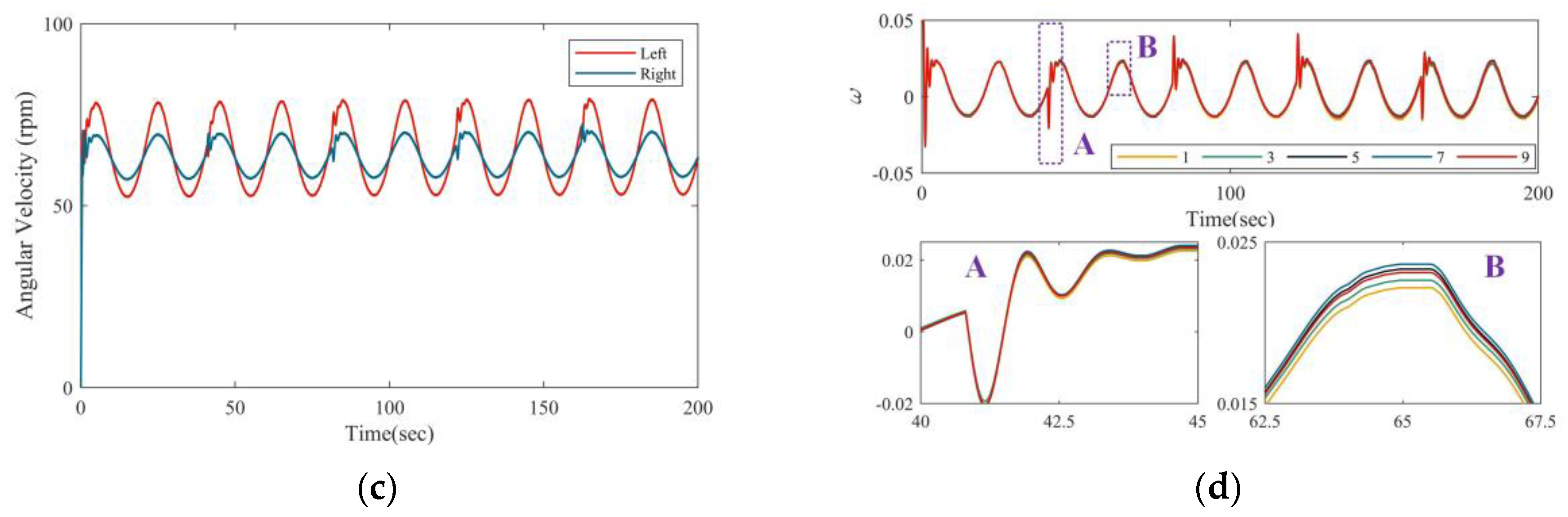
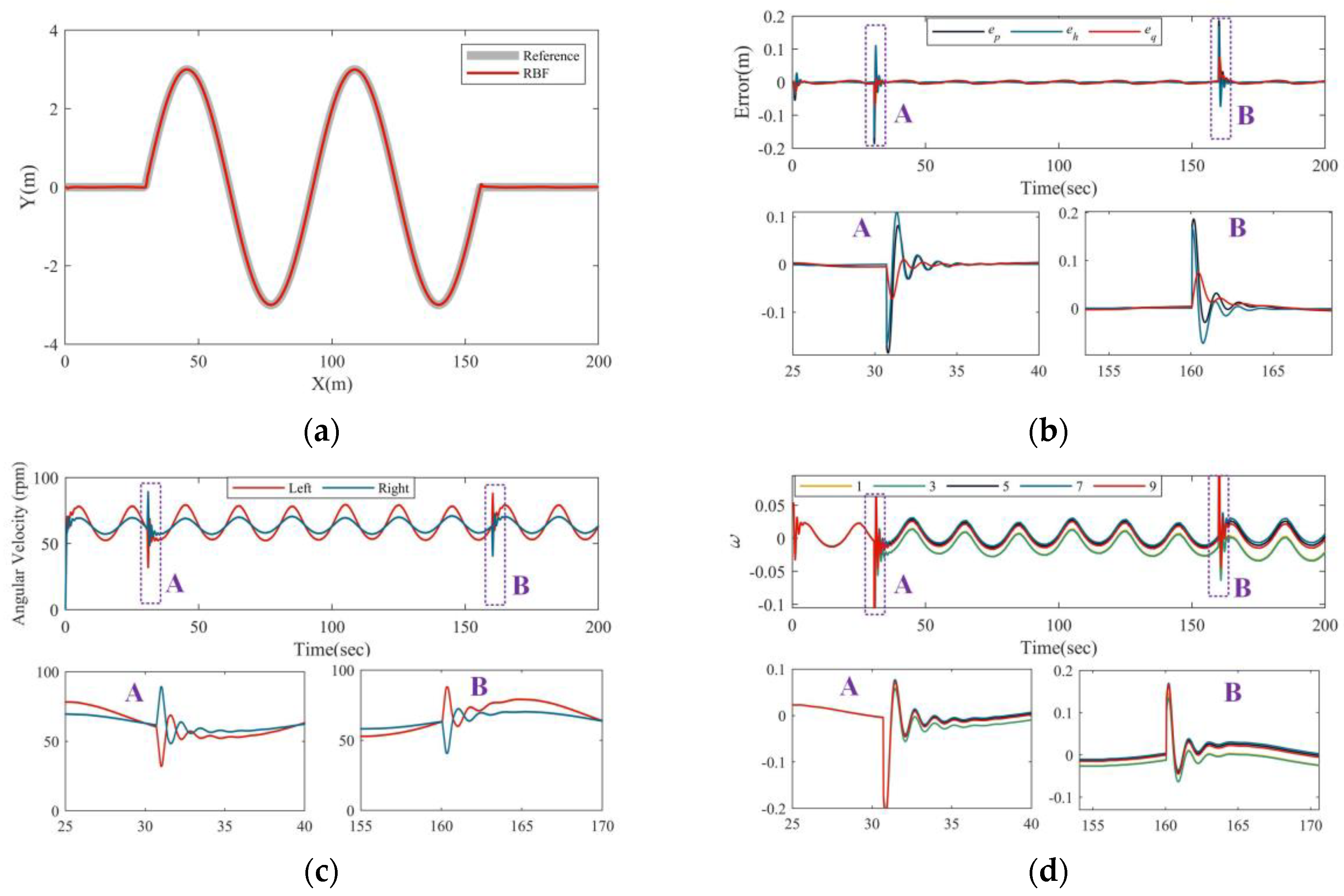
4.1. Algorithm Verification
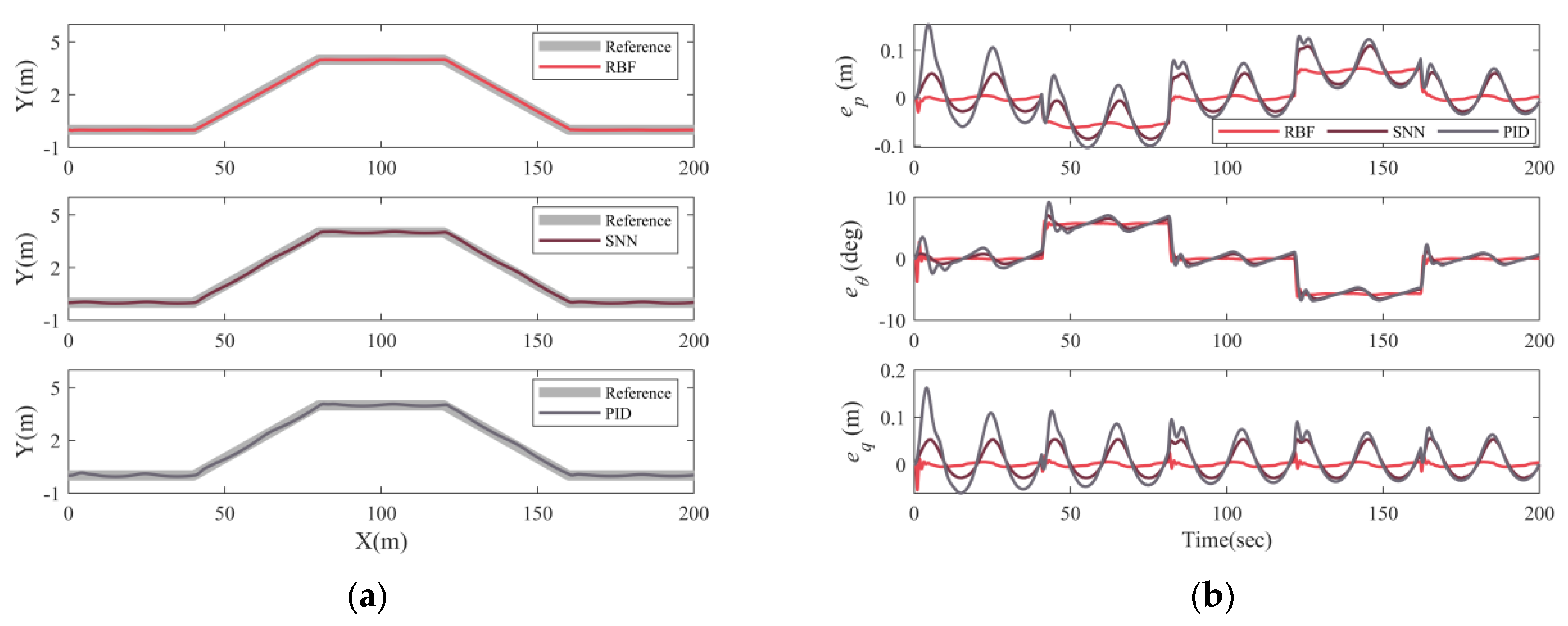
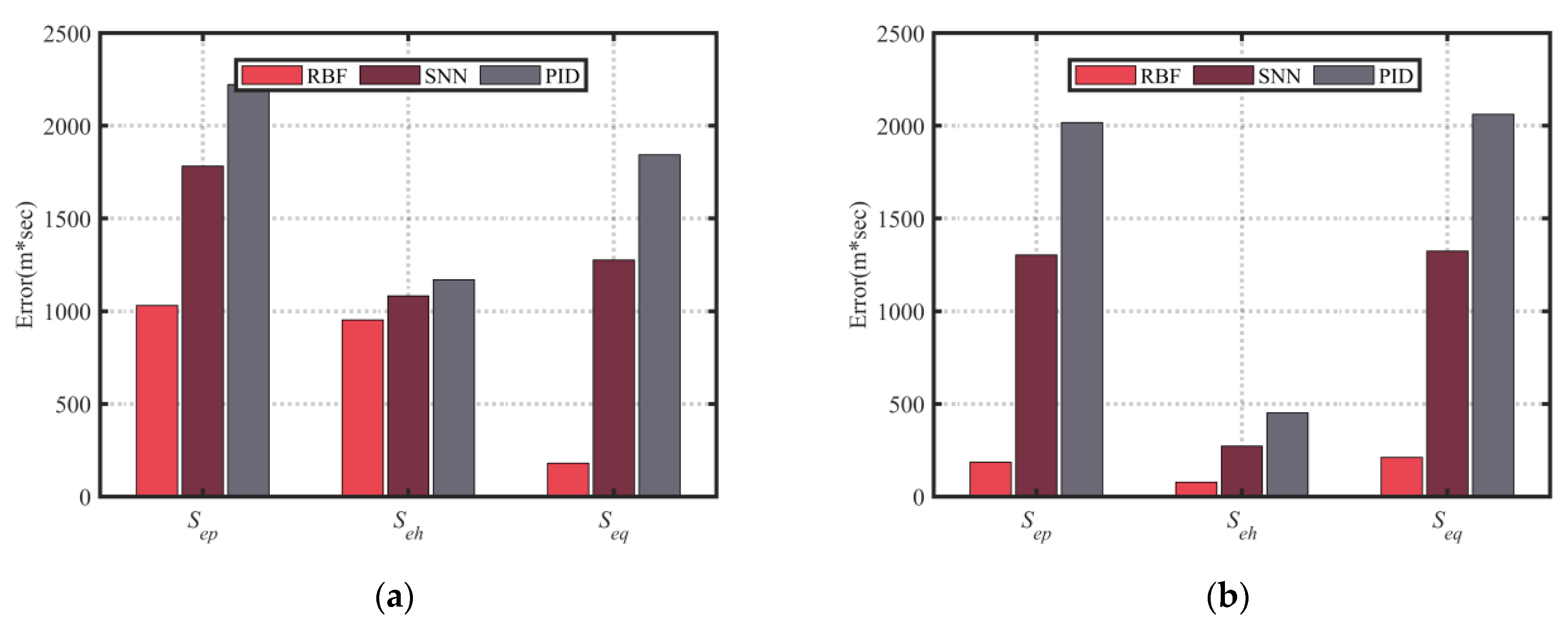
4.2. Comparison with Other Control Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amer, N.H.; Zamzuri, H.; Hudha, K. Modelling and Control Strategies in Path Tracking Control for Autonomous Ground Vehicles: A Review of State of the Art and Challenges. J. Intell. Robot. Syst. 2016, 86, 1–30. [Google Scholar] [CrossRef]
- Tavan, N.; Tavan, M.; Hosseini, R. An optimal integrated longitudinal and lateral dynamic controller development for vehicle path tracking. Latin Am. J. Solids Struct. 2014, 12, 1006–1023. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.S.; Yang, X.L. Intelligent vehicle trajectory tracking based on neural networks sliding mode control. In Proceedings of the International Conference on Informative and Cybernetics for Computational Social Systems IEEE, Qingdao, China, 9–10 October 2014. [Google Scholar]
- Yue, M.; Wang, L.; Ma, T. Neural network based terminal sliding mode control for WMRs affected by an augmented ground friction with slippage effect. IEEE/CAA J. Autom. Sin. 2017, 4, 498–506. [Google Scholar] [CrossRef]
- Huynh, H.N.; Verlinden, O.; Wouwer, A.V. Comparative application of model predictive control strategies to a wheeled mobile robot. J. Intell. Robot. Syst. 2017, 87, 81–95. [Google Scholar] [CrossRef]
- Hernandez-Guzman, V.M.; Silva-Ortigoza, R.; Marquez-Sanchez, C. A PD path-tracking controller plus inner velocity loops for a wheeled mobile robot. Adv. Robot. 2015, 29, 1015–1029. [Google Scholar] [CrossRef]
- Park, M.; Lee, S.; Han, W. Development of Steering Control System for Autonomous Vehicle Using Geometry-Based Path Tracking Algorithm. Etri J. 2015, 37, 617–625. [Google Scholar] [CrossRef]
- Rajamani, R.; Zhu, C.; Alexander, L. Lateral control of a backward driven front-steering vehicle. Control Eng. Pract. 2003, 11, 531–540. [Google Scholar] [CrossRef]
- Li, Z.; Xu, C. Adaptive fuzzy logic control of dynamic balance and motion for wheeled inverted pendulums. Fuzzy Sets Syst. 2009, 160, 1787–1803. [Google Scholar] [CrossRef]
- Li, Z.; Li, J.; Kang, Y. Adaptive robust coordinated control of multiple mobile manipulators interacting with rigid environments. Automatica 2010, 46, 2028–2034. [Google Scholar] [CrossRef]
- Wang, D.; Low, C.B. Modeling and analysis of skidding and slipping in wheeled mobile robots: Control design perspective. IEEE Trans. Robot. 2008, 24, 676–687. [Google Scholar] [CrossRef]
- Yoo, S.J. Adaptive neural tracking and obstacle avoidance of uncertain mobile robots with unknown skidding and slipping. Inf. Sci. 2013, 238, 176–189. [Google Scholar] [CrossRef]
- Kang, H.S.; Kim, Y.T.; Hyun, C.H. Generalized Extended State Observer Approach to Robust Tracking Control for Wheeled Mobile Robot with Skidding and Slipping. Int. J. Adv. Robot. Syst. 2013, 10, 463–474. [Google Scholar] [CrossRef]
- Gao, H.; Song, X.; Liang, D. Adaptive motion control of wheeled mobile robot with unknown slippage. Int. J. Control 2014, 87, 1513–1522. [Google Scholar] [CrossRef]
- Chen, C.; Gao, H.; Ding, L. Trajectory tracking control of WMRs with lateral and longitudinal slippage based on active disturbance rejection control. Robot. Auton. Syst. 2018, 107, 236–245. [Google Scholar] [CrossRef]
- Xuan, V.; Ha, C.; Lee, J. Fuzzy Vector Field Orientation Feedback Control-Based Slip Compensation for Trajectory Tracking Control of a Four Track Wheel Skid-Steered Mobile Robot. Int. J. Adv. Robot. Syst. 2013, 10, 1–14. [Google Scholar]
- Bayar, G.; Bergerman, M.; Konukseven, E.I. Improving the trajectory tracking performance of autonomous orchard vehicles using wheel slip compensation. Biosyst. Eng. 2016, 146, 149–164. [Google Scholar] [CrossRef] [Green Version]
- Han, J. Tracking Control of Moving Sound Source Using Fuzzy-Gain Scheduling of PD Control. Electronics 2020, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Helmick, D.M.; Cheng, Y.; Clouse, D.S. Path following using visual odometry for a mars rover in high-slip environments. Aerosp. Conf. Proc. IEEE 2004, 2, 772–789. [Google Scholar]
- Lucet, E.; Lenain, R.; Grand, C. Dynamic path tracking control of a vehicle on slippery terrain. Control Eng. Pract. 2015, 42, 60–73. [Google Scholar] [CrossRef]
- Taghavifar, H.; Rakheja, S. A novel terramechanics-based path-tracking control of terrain-based wheeled robot vehicle with matched-mismatched uncertainties. IEEE Trans. Veh. Technol. 2019, 69, 67–77. [Google Scholar] [CrossRef]
- Prado, Á.J.; Michałek, M.M.; Cheein, F.A. Machine-learning based approaches for self-tuning trajectory tracking controllers under terrain changes in repetitive tasks. Eng. Appl. Artif. Intell. 2018, 67, 63–80. [Google Scholar] [CrossRef]
- Huang, J.; Wen, C.; Wang, W. Adaptive output feedback tracking control of a nonholonomic mobile robot. Automatica 2014, 50, 821–831. [Google Scholar] [CrossRef]
- Li, Z.; You, B.; Ding, L. Trajectory Tracking Control for WMRs with the Time-Varying Longitudinal Slippage Based on a New Adaptive SMC Method. Int. J. Aerosp. Eng. 2019, 2019, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.P.; Ge, S.S.; Lee, T.H. Adaptive neural network control of a wheeled mobile robot violating the pure nonholonomic constraint. In Proceedings of the 43rd IEEE Conference on Decision and Control, Atlantis, Paradise Island, Bahamas, 14–17 December 2004. [Google Scholar]
- Gao, Y.; Cao, D.; Shen, Y. Path-following control by dynamic virtual terrain field for articulated steer vehicles. Veh. Syst. Dyn. 2020, 58, 1528–1552. [Google Scholar] [CrossRef]
- Li, J.; Liu, X.; Liu, G. Application of an adaptive controller with a single neuron in control of multi-motor synchronous system. In Proceedings of the 2008 IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| r | 0.21 | m |
| B | 0.67 | m |
| m | 115 | kg |
| J | 20.59 | kgm2 |
| JL | 3.29 | kgm2 |
| JR | 3.29 | kgm2 |
| CxL | 10 | kN |
| CxR | 10 | kN |
| Cy | 240 | N (°)−1 |
| D | 0.5335 | Nm (A)−1 |
| Z | 0.005 | Nms (rad)−1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, Y.; Xue, B.; Zeng, R. Self-Adaptive Path Tracking Control for Mobile Robots under Slippage Conditions Based on an RBF Neural Network. Algorithms 2021, 14, 196. https://doi.org/10.3390/a14070196
Kang Y, Xue B, Zeng R. Self-Adaptive Path Tracking Control for Mobile Robots under Slippage Conditions Based on an RBF Neural Network. Algorithms. 2021; 14(7):196. https://doi.org/10.3390/a14070196
Chicago/Turabian StyleKang, Yiting, Biao Xue, and Riya Zeng. 2021. "Self-Adaptive Path Tracking Control for Mobile Robots under Slippage Conditions Based on an RBF Neural Network" Algorithms 14, no. 7: 196. https://doi.org/10.3390/a14070196
APA StyleKang, Y., Xue, B., & Zeng, R. (2021). Self-Adaptive Path Tracking Control for Mobile Robots under Slippage Conditions Based on an RBF Neural Network. Algorithms, 14(7), 196. https://doi.org/10.3390/a14070196