1. Introduction
Understanding the dynamics of small-scale processes occurring in the vicinity of the sea surface is important for modeling the exchange of mass, heat and momentum between the atmosphere and the ocean [
1,
2]. In many practical situations, clouds of bubbles, produced mainly by breaking surface waves, may also affect the state of the near-surface water layer [
3,
4]. Laboratory and field observations [
3,
5,
6,
7] as well as recent direct numerical simulations of breaking waves [
8] indicate that whereas comparatively large bubbles (with diameters
d > 1 mm) quickly rise to the surface and burst, smaller (or micro-) bubbles (
d~100 µm) are suspended in water for a considerably longer times and thus contribute mostly to the void fraction observed in the near-surface oceanic layer.
According to field observations the concentration of microbubbles (and thus the void fraction) in the upper ocean layer can be considerable even at relatively low winds and affects gas exchange between the air and water [
9,
10], production of sea-salt aerosols [
11], and the propagation of sound in the upper ocean [
12,
13]. Therefore, modeling microbubble dynamics is important for many practical applications.
Numerical modeling of the dispersion of microbubbles by surface waves and currents taking into account their impact on the near-surface turbulence represents a challenging problem, and various models are employed in numerical investigations of bubbly flows [
14]. Known numerical studies of microbubble dispersion are mainly restricted to either bubble-laden isotropic turbulence (with periodic boundary conditions) [
15], or boundary-layer flows in the vicinity of a fixed, flat boundary [
16]. However, performing numerical simulation of a flow in the vicinity of a waved boundary involves additional efforts required to resolve a strong geometric nonlinearity. There are mainly two methods employed to cope with this problem in numerical studies. One approach is related to using the Volume of Fluid method where the air and water phases are directly resolved (cf., e.g., [
8]). However, in order to model a sufficiently high void fraction (on the order of 10
−5 [
12]), the number of microbubbles to be considered in the framework of a fully-resolved numerical experiment with an adaptive mesh refinement may become prohibitively large. Another approach (also used and discussed in the present study) employs a mapping of the physical coordinates onto the curvilinear coordinates where the waved surface is reduced to a flat surface.
The objective of the present paper is to present a numerical algorithm for evaluation of the dispersion of micro-bubbles by progressive, non-breaking surface (Stokes) waves. The wave shape is prescribed and assumed to be stationary, and unaffected by either bubbles or induced turbulent motions. Thus it is assumed that for typical void fractions observed in the upper ocean layer (on the order of O(10
−5) or less), the impact of bubbles on the carrier surface wave flow remains negligible. Results of numerical experiments also reveal that typical amplitudes of turbulent wave-induced fluctuations are by orders of magnitude smaller as compared to the energy-containing mother wave [
17]. However, in the present study, the impact of bubbles on the induced turbulence, although not so significant at the considered void fractions, is accounted for. The algorithm also allows to investigate how wind-induced surface drift affects bubbles dynamics employing a parameterization of the drift velocity at the water surface in terms of the air friction velocity (determined by the velocity scale tied to the surface wave celerity) [
18]. The numerical method is based on the algorithms previously developed for modeling atmospheric boundary layer over progressive surface waves under various conditions (stable air-stratification, parasitic capillaries, droplets) [
19,
20,
21,
22,
23] and adapted here for modeling a bubble-laden near-surface water layer.
2. Governing Equations
Figure 1 outlines the schematic of the problem under consideration.
A domain with sizes Lx = 6λ, Ly = 4λ, Lz = λ, with periodic side boundaries, a solid bottom and a waved upper boundary, , is considered, and the Cartesian coordinates are employed, . The motion of the fluid (water) is driven by the upper boundary where a progressive, two-dimensional (2D) stationary wave of amplitude a, celerity c and length λ propagating in the positive x-direction is prescribed.
A Eulerian-Lagrangian approach is adopted where the Navier-Stokes equations of the water motion are solved in a Eulerian frame, and the bubbles are tracked simultaneously by solving their respective equations of motion in a Lagrangian frame.
The Navier-Stokes equations for the carrier fluid are written in the dimensionless form [
24]:
where
xi ≡ (
x,
y,
z),
are water velocity components,
is the pressure, and
is a momentum source term (cf. Equation (8) below) contributed by the
n-th bubble, and
n = 1, …,
Nb, the latter being the total, constant, number of tracked bubbles. Variables in Equation (1) are normalized with velocity scale,
U0, set equal the surface wave phase speed,
c, and length scale,
L0, equal to the wave length,
λ. The pressure is normalized with
where
ρ is the water density (≈1 g/cm
3). The carrier flow Reynolds number, Re, measures the ratio of the inertial vs. viscous effects and is defined as:
where
v is the water kinematic viscosity (≈0.01 cm
2/s). Equation (1) is supplemented by the incompressibility condition:
which implicitly defines the pressure field,
(cf. Equation (18) below).
The bubbles equations of motion are written as [
15]:
In Equations (4) and (5),
are the
n-th bubble coordinate and velocity components,
is the fluid velocity at the bubble location,
and
are the material derivatives along the bubble trajectories and the surrounding fluid Lagrangian paths, respectively;
g is the dimensionless gravitational acceleration, and
is the surrounding fluid vorticity;
and
are the Kronecker and Levi-Civita tensors. The forces acting on the bubble (in the order as in the right hand side of Equation (5)) are the fluid acceleration, viscous drag, lift, and buoyancy. The correction in the viscous drag force (accounted for by factor
f) is caused by a finite Reynolds number of the bubble and defined as:
where [
15],
Both the momentum source term in the right hand side of Equation (1),
, and Equation (5) are formulated under an assumption of a negligible mass of the bubble as compared to water. A “point force” approximation is adopted, whereby the following formulation for the source term,
, is employed [
23]:
where
is a geometrical weight-factor inversely proportional to the distance betweeen the
n-th bubble located at
rn = (
xn,
yn,
zn) and the grid node at
r = (
x,
y,
z), and Ω
g (
r) is the volume of the considered grid cell. Thus, for each individual bubble, eight weight-factors are defined (for each of the surrounding grid nodes) and normalized, so that the sum of partial contributions distributed to these nodes exactly equals the respective total source contribution. Therefore, there is no numerically induced loss or gain of momentum in the bubble-water exchange processes (cf., e.g., [
23] and references therein for a more detailed discussion).
3. Numerical Method
In order to avoid coping with a strong geometric nonlinearity caused by the wavy upper boundary during the integration of the governing equations discussed above, a mapping is introduced transforming the domain with a wavy upper boundary into a domain with a flat upper boundary, and relating the Cartesian coordinates (
x,
z) to curvilinear coordinates (
) as:
Mapping (9) transforms the wavy (upper) boundary at
into a flat-plane boundary at
. The water surface elevation,
, is defined implicitly by Equation (9) and up to the second order in
ka coincides with the Stokes-wave solution [
25]:
An additional mapping is also employed for the vertical coordinate in the form:
where
, so that the grid nodes are clustered in the vicinity of the upper boundary, at
, and stretched with increasing depth.
Since the mapping, Equation (9), is conformal, the following relations between the derivatives hold:
where the Jacobian of the transformation is:
Due to the properties in Equations (12) and (13), the derivatives over the Cartesian coordinates,
x and
z, can be related to the derivatives over curvilinear coordinates,
, as,
The Laplacian operator is also rewritten as:
Equations (1) and (3) for the water velocity are discretized on a staggered grid consisting of nodes, in the and coordinate directions using a second-order-accuracy, finite-difference method. At each time moment, tk, the mesh is redefined and adapted to the shape of the water surface, , according to Equation (9), and all fields computed during the preceding time step are re-defined on the new mesh by a linear interpolation.
The integration of Equation (1) is advanced in time by the second-order-accuracy Adams-Bashforth method in two stages to calculate the water velocity at each new time step,
Ui(
tk+1). First, an intermediate velocity,
, is computed using the velocity fields at the preceding time steps [
26]:
where the flux,
, is evaluated as,
Further, the new pressure,
, is computed by solving its respective Poisson equation in the form,
Equation (18) is solved by iterations by performing, at each iteration step (
j) the FFT in the horizontal directions and Gaussian elimination in the vertical direction. The iteration procedure stops when the condition
is satisfied. Usually this condition is met after
j = 3–5 iterations. The new velocity at
k + 1 time step satisfying the incompressibility condition (2) is then computed as:
At the upper boundary,
, the no-slip (Dirichlet) condition for the velocity is prescribed:
where the surface drift velocity,
, is expressed as [
27]:
Two different cases are considered. In one case, parameter q is put to zero, Ud = 0, and the wind stress effects are not taken into account. In this case, the water velocity at the boundary coincides with orbital velocities of the fluid particles in the surface wave. In another case, is prescribed, and thus is finite so that the wind-stress effects upon the water surface are accounted for.
Periodic conditions for all fields are prescribed at the side boundaries, and the no-slip (Dirichlet) condition for the water velocity is prescribed at the bottom boundary ().
The bubble equation of motion is solved by employing the Adams-Bashforth method:
In Equation (23), the surrounding fluid velocity, its acceleration, and the ambient-flow vorticity at the location of each bubble are obtained by a Hermitian 4th-order accuracy interpolation procedure. The dimensionless bubble response time,
τn, (or the Stokes number) is expressed as:
The bubble coordinate equation is advanced in time by employing the Adams method as:
The water velocity is initialized as a random, zero-mean field with an amplitude of 0.1% (normalized by the velocity scale,
U0). After initiation, a transient occurs during which the velocity field adjusts to boundary conditions, and a statistically stationary flow state is reached (at dimensionless time
t = 100). The results (not shown) indicate that the the mean, wave velocity field is established comparatively early (~O(10) wave periods) and the transient to the stationary flow state is mainly related to the development of a near-surface, wave-induced turbulent layer (of ~O(100) duration, cf., e.g., [
17]). After the stationary flow state is reached, the bubbles are injected into the flow at random locations with a concentration (number density) distribution exponentially decreasing with depth with an e-folding scale close to the surface wave length (similar to void-fraction distributions observed in natural, oceanic conditions [
12]). Since bubbles rise due to buoyancy, they reach the upper boundary (i.e., the water surface) and thus leave the computational domain. In order to maintain a constant void fraction throughout the simulation, these bubbles are re-injected at random locations with a spatial distribution exponentially decaying with depth and a velocity equal to the surrounding water velocity.
The simulation of the bubble-laden flow continues until the flow again reaches a stationary state (at
t = 250) where its statistical characteristics are evaluated. Similar to the previous DNS studies of flows over waved surfaces [
19,
20,
21,
22,
23,
27,
28]), in the statistical post-processing analysis, phase averaging, equivalent to averaging over an ensemble of turbulent fluctuations, is performed. This averaging (denoted below by angular brackets) is firstly performed over the
y-coordinate and time
t, and further window-averaged over the
ξ—coordinate over six wave lengths as:
where
F is the averaged field,
, and
. Time averaging is preformed over interval
, so that the phase of the surface wave at consecutive steps,
tk,
tk+1, changes by 2
π and thus the shape of the upper boundary remains the same for all considered time moments, cf. Equation (10). Further the mean vertical profile is obtained by additional averaging of
<F> along the
ξ-coordinate as:
where
Nx = 360. Phase-averaged fields of the bubbles concentration (void fraction) and its fluxes are also evaluated as:
and the respective vertical mean profiles, [
CVin], are obtained as in Equation (27).
Below the term DNS (i.e., Direct Numerical Simulation) is used, although the surface wave dynamics is prescribed and assumed to be stationary, and the bubbles are considered as non-deformable and spherical. However, these assumptions are justified for the considered case of non-breaking waves (sufficiently small wave-slope ka) and bubble sizes (d less than 1 mm). On the other hand, the primitive, full 3D Navier-Stokes equations, Equations (1), (4) and (5), are integrated without employing any closure assumptions.
5. Conclusions
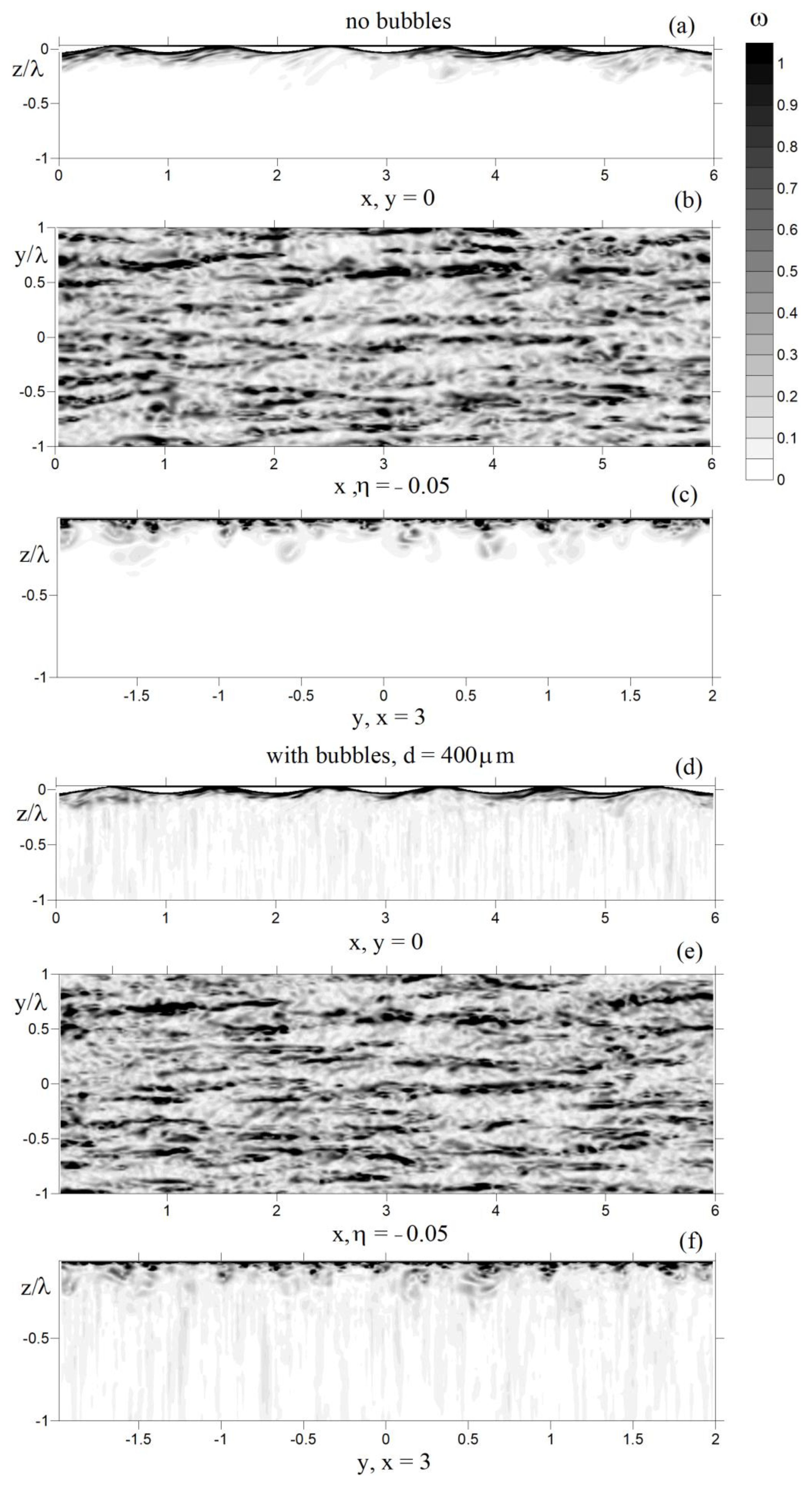
We have presented an algorithm for numerical modeling of microbubble dispersion in the near-surface water layer of the upper ocean, under the action of non-breaking, progressive surface waves. The algorithm is based on a Eulerian-Lagrangian approach where full, 3D Navier-Stokes equations for the carrier flow induced by a waved water surface are solved in a Eulerian frame, and the trajectories of individual bubbles are simultaneously tracked in a Lagrangian frame, taking into account the impact of the bubbles on the carrier flow and the impact of a wind-induced surface drift. The bubbles diameters are considered in the range from 200 to 400 microns (thus, micro-bubbles), and the effects related to the bubbles deformation and dissolution in water are neglected. The wave shape is prescribed and assumed to be unaffected by either bubbles or induced turbulent motions.
The simulations results show that bubbles are capable of enhancing the carrier-flow turbulence, as compared to the bubble-free flow, and that the vertical water velocity fluctuations are mostly augmented, and increasingly so by larger bubbles. The results also show that the bubbles dynamics are governed by buoyancy, the surrounding fluid acceleration force, and the drag force whereas the impact of the lift force on the bubble dynamics remains negligible. On the basis of the simulation results, parameterizations for the void fraction fluxes have been obtained. The results show that the vertical component of the void-fraction flux remains unaffected by either the wave motion or wave-induced turbulence as compared to that in a quiescent water. The horizontal void-fraction flux is produced by a mean drift of the bubbles in the direction of the surface wave propagation and can be regarded as analogous to the Stokes drift of Lagrangian (non-inertial) particles in a 2D surface wave modified by the bubbles’ ascent. The developed algorithm and parameterizations for void-fraction fluxes can be used for prediction of microbubble dispersion in the ocean upper layer and further employed in large-scale prognostic models.
As a next step in the development of the algorithm, a more complicated problem is to be considered where the wave motion is fully resolved (i.e., not prescribed) thus allowing modification of the surface wave by either induced turbulence or bubbles. This however remains a subject for future research.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






