
An Automated Pipeline for Extracting Forest Structural Parameters by Integrating UAV and Ground-Based LiDAR Point Clouds

Abstract
:1. Introduction
- It introduces a pipeline for the automatic measurement of forest structural parameters on a large scale using ULS point cloud data. This resolves the issue of automating high-precision measurements of forest information over extensive forest areas, which was challenging when using laser radar data from a single source, whether ULS or TLS, for tree structure modeling.
- It proposes an automated matching method for individual trees in TLS point clouds and their corresponding trees in ULS point clouds, based on tree structures. This overcomes the problem commonly encountered with point-based registration methods, which often have high consistency requirements between TLS and ULS point cloud data, making them impractical for real-world applications.
- It introduces a method for augmenting and correcting ULS point cloud sample data, using DBH calculated from TLS point clouds. This addresses the issue of significant bias in the DBH estimation equation, resulting from errors in DBH directly calculated from ULS point clouds.
2. Materials and Methods
2.1. Study Site and Research Data
2.1.1. Study Site
2.1.2. Point Cloud Data Acquisition Method
2.1.3. Manual Field Measurements
2.2. Methodology
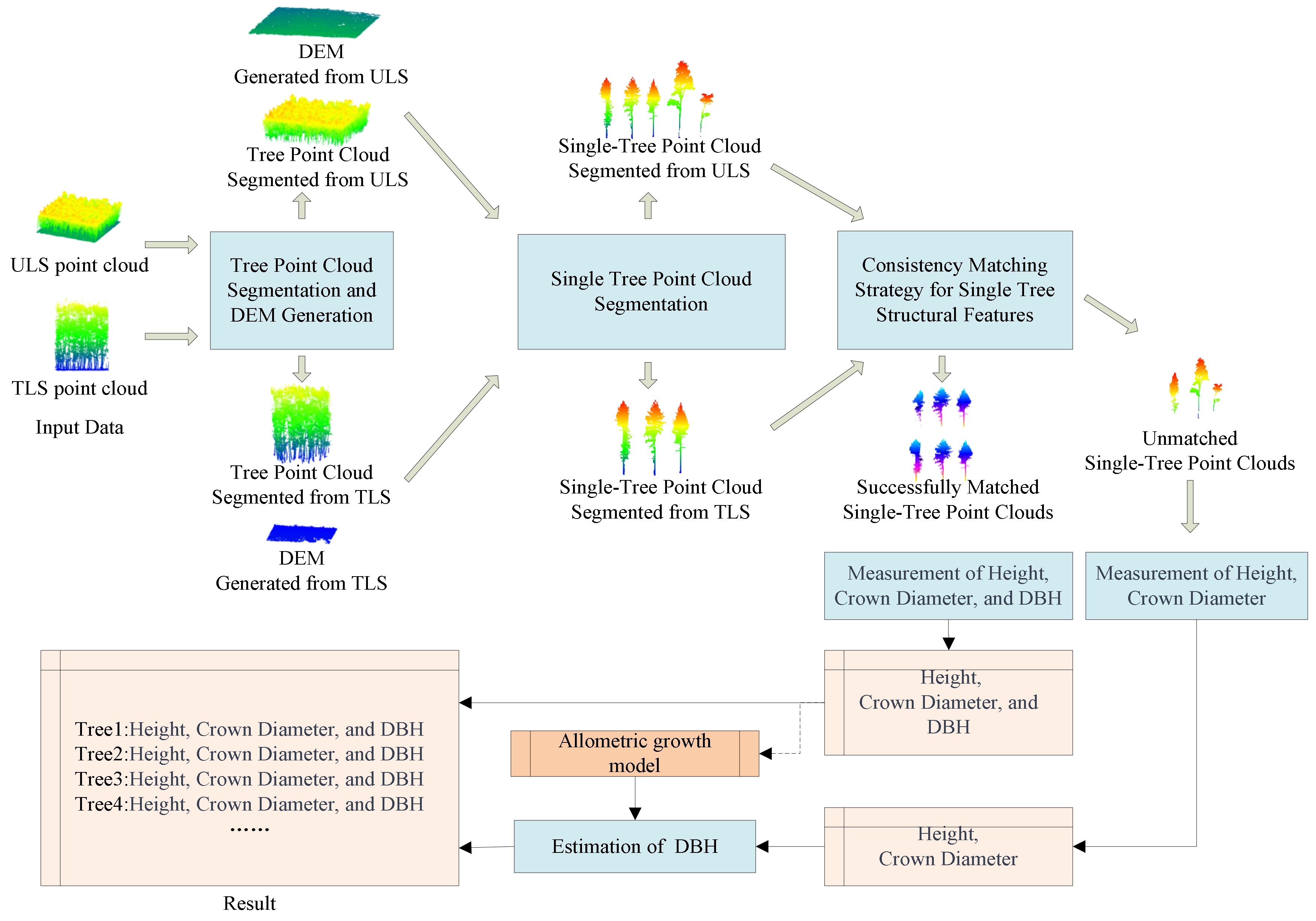
2.2.1. Overview of the Pipeline
- Data input: large-scale forest point clouds, acquired using drones and ground-based equipment, (in *.pcd file format) are used as input data for the large-scale modeling method.
- Digital elevation model (DEM) extraction: To perform subsequent segmentation of tree point clouds and obtain accurate tree height, a complete DEM needs to be established. The cloth simulation filter (CSF)-based algorithm [40] has been proven to be one of the best-performing ground point segmentation methods. Due to the high-density nature of ULS point clouds and the threshold settings during the CSF filtering process, a large number of non-ground points are included. Therefore, unlike traditional ground elevation modeling methods, downsampling, rather than upsampling, is required during ULS point cloud modeling for denoising purposes. The Delaunay triangulation of the resulting ground point cloud ultimately achieves automated and precise extraction of ground elevation models. Due to CSF’s point cloud inversion property, it is also applicable to DEM generation from TLS point clouds.
- Single-tree point cloud segmentation: Processing the ULS and TLS tree point clouds involves extracting the portions above a given DEM threshold (e.g., 0.5 m) as input for single-tree segmentation within the point cloud. This step requires assigning indices to segmented single-tree instances. To accomplish the task of automatically segmenting single-tree point clouds in large-scale areas, a method based on deep supervised machine learning for tree detection, segmentation, and trunk reconstruction, as proposed by Windrim et al. [41], is employed. This algorithm is designed specifically for high-resolution aerial LiDAR point clouds and can segment individual trees, identify trunk points, and further build a main stem segmentation model including tree height, diameter, taper, and sweep. The basic idea of the algorithm is to project the tree point cloud into a bird’s eye view (BEV) representation, and then train a Faster R-CNN [42] network with a Resnet-101 backend [43] for segmenting single-tree point clouds. Once each individual tree is detected as a group of 3D points, these points can be further segmented into two parts, stem and canopy, using the PointNet [44] network.
- Single-tree structural feature consistency matching: Differing from existing point-based methods for matching point clouds from different sources, this paper proposes a structural consistency search algorithm to match single-tree point clouds segmented from ULS point clouds with those segmented from TLS point clouds, establishing a dataset for estimating allometric growth models. If a limited number of single-tree point clouds are obtained from the provided TLS point cloud, ULS tree point clouds with distinct main stem features, obtained in step 3, can also be used as model estimation data. Tree height, crown diameter, and DBH calculations are performed directly on these single-tree point clouds. Utilizing the obtained quantitative structural data from these trees, an allometric growth model for the current sample area can be established. These quantitative structural parameters from this portion of trees will also be part of the overall measurement results.
- For trees in ULS point clouds with poor quality or for incomplete main stem point clouds, their tree height and crown diameter are directly extracted. These values are then input into the allometric growth model, established in step 4, to obtain estimated DBH parameters.
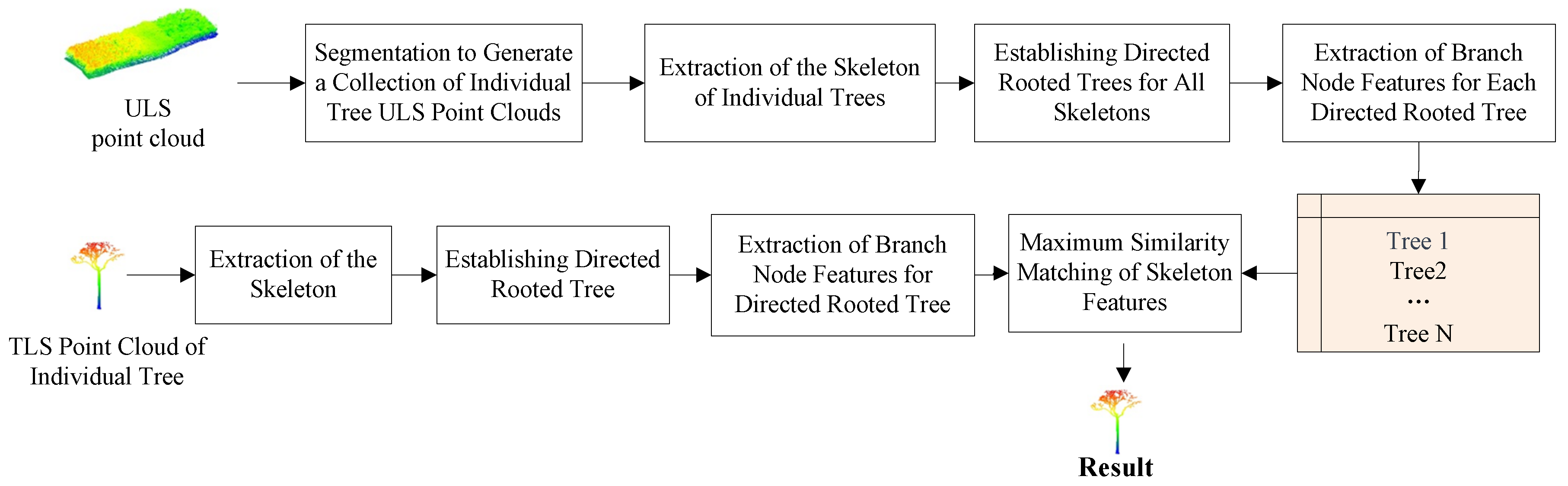
2.2.2. Tree Structure Consistency Assessment Method
- The object being sought unquestionably exists within the collection of tree point clouds segmented from ULS data.
- The same tree exhibits similar topological structures across various sources of point clouds, even in cases where certain branches may remain unobserved in some of the source point clouds.
- Constructing the Branching Structure of Single Trees from Point Clouds
- Node Feature Representation
- To calculate the feature representation of nodes, we perform a depth-first traversal from the root node, computing the depth ‘r’ for all branch nodes. These depth values serve as weighting coefficients for the individual branch nodes. This consideration is primarily based on the growth characteristics of trees, where the main trunk often has the most branches. The decision to use weighting for node similarity calculations depends on whether we believe the main trunk contributes more to tree similarity.
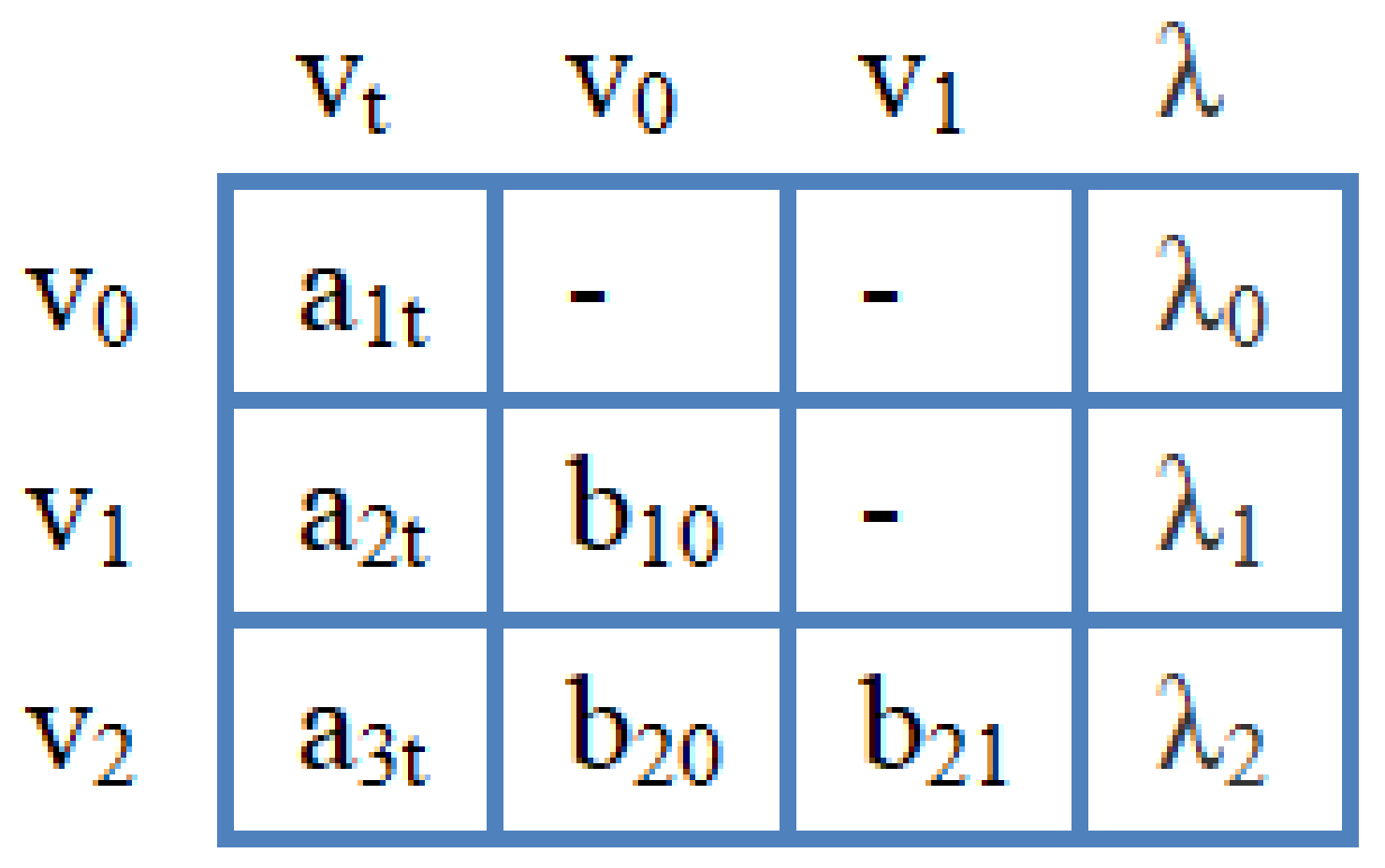
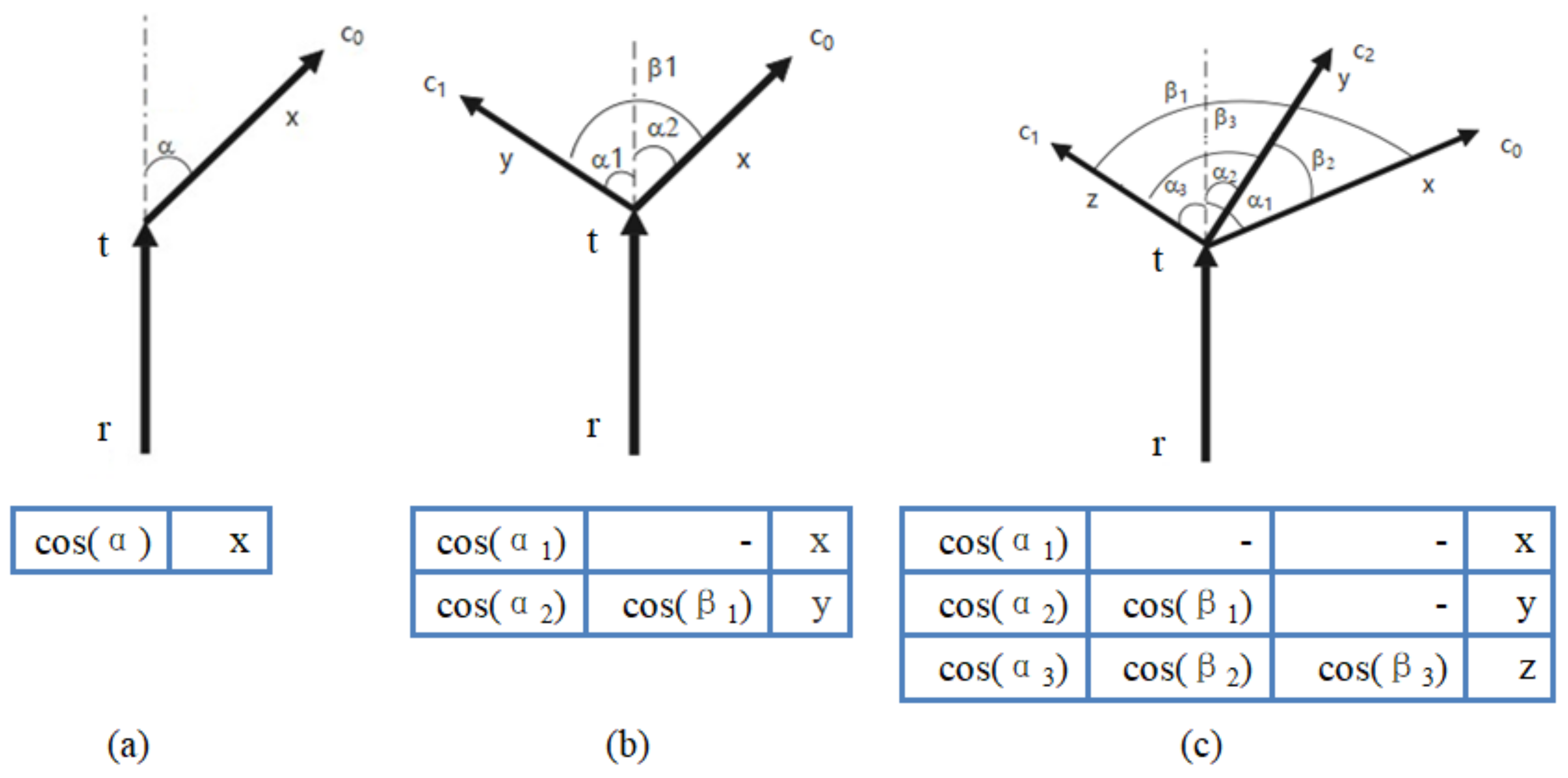
- We calculate the structural features of each branch node ‘t’ and represent them as a two-dimensional feature matrix. Taking a branch node with three child nodes as an example, the structure is depicted in Figure 7.
- Two-Dimensional Feature Matrix Similarity Assessment
- For the two feature matrices to be evaluated, Am×m+1 and Bn×n+1, if m = n and for all aij and bij, |aij − bij| < µ (µ being the similarity measurement threshold), they are considered fully isomorphic, and the node similarity is 1.
- If m = n and for all aij and bij, |aij − bij| ≥ µ (µ being the similarity measurement threshold), they are considered fully heterogeneous, and the node similarity is 0.
- If m = n, then if the number of elements satisfying |aij − bij| ≥ µ (µ being the similarity measurement threshold) is x, and the number of valid elements in A and B is y (N = (m × m + 3)/2), the node similarity is x/y.
- If m < n, sequentially delete the rows and columns corresponding to the n–m nodes in B, and calculate the similarity according to the above rules, taking the maximum value q × m/n as the node similarity.
- Tree Similarity Assessment
2.2.3. Methods for Calculating Tree Height and Crown Diameter
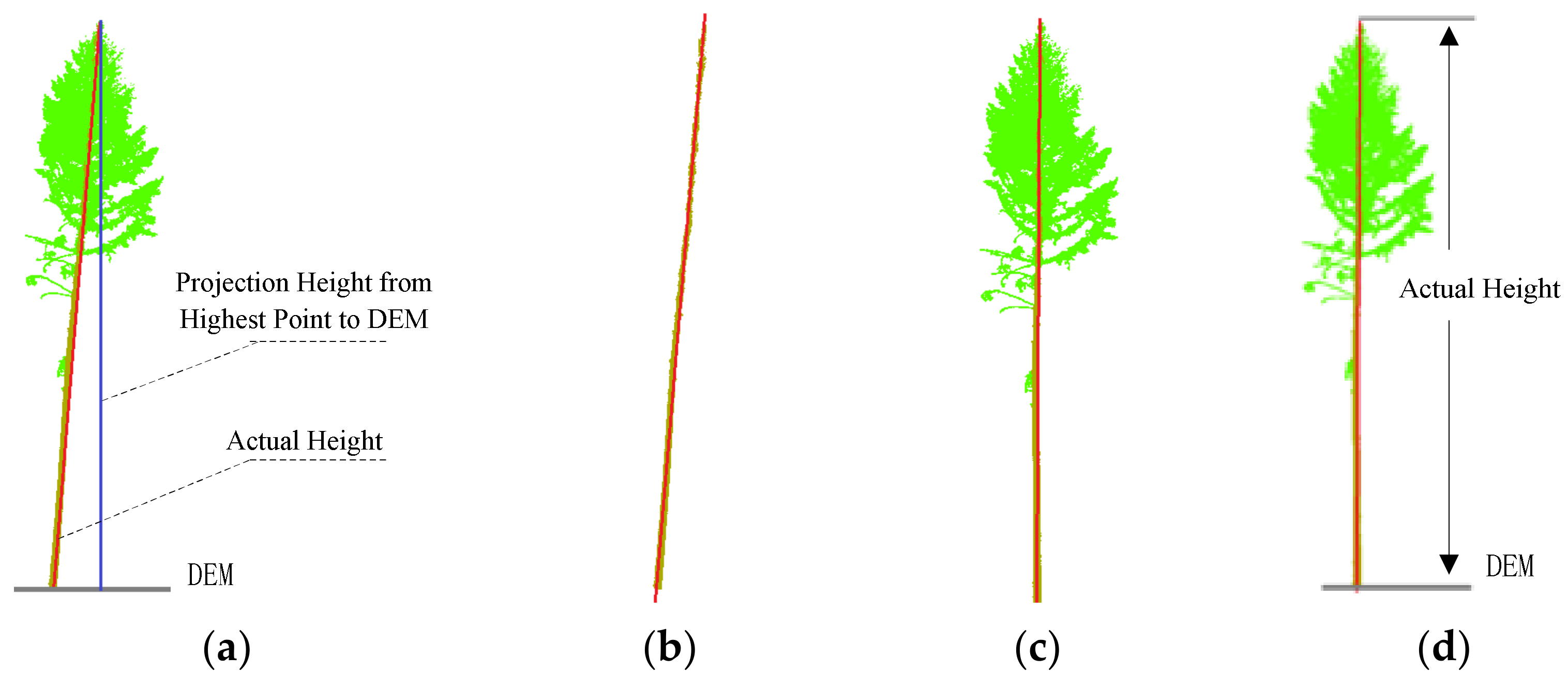
- Tree Height Calculation
- Calculation of Crown Diameter
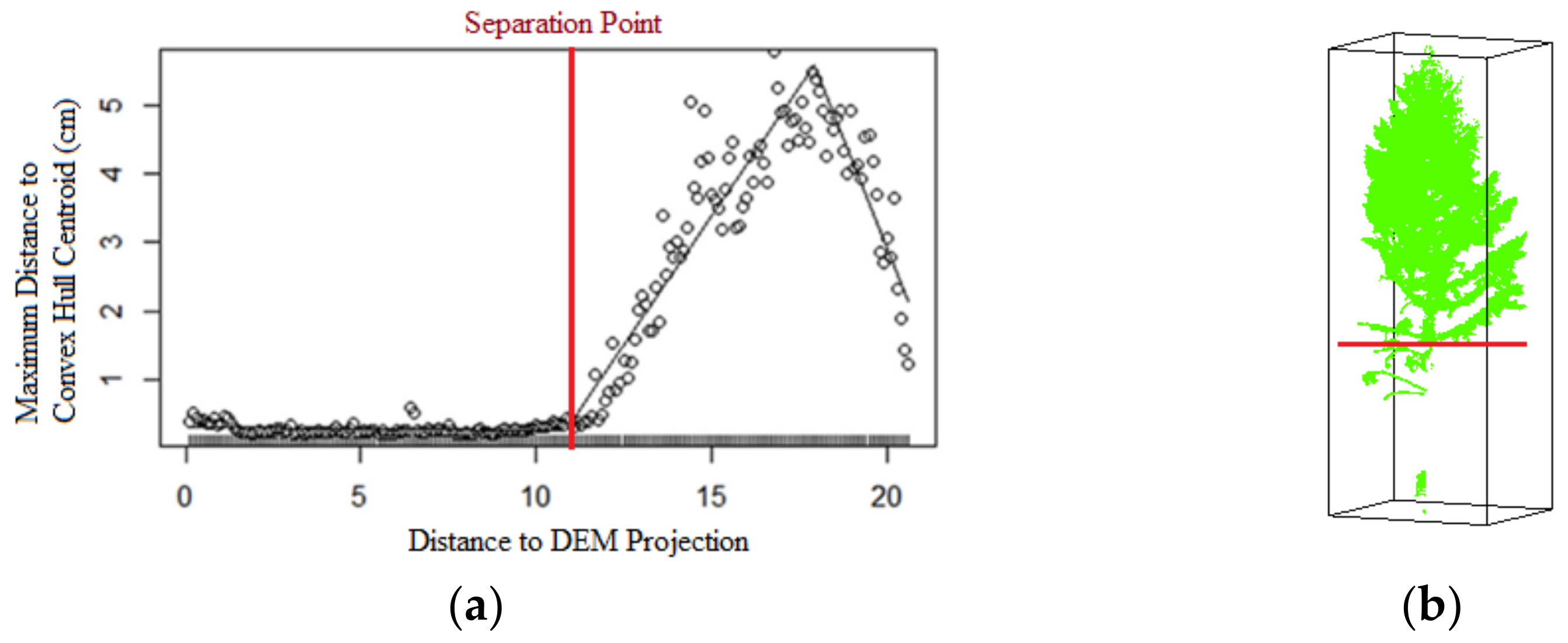
- The tree crown point cloud undergoes vertical segmentation at 0.1 m intervals.
- Each segment is subjected to a convex hull fitting process within the xoy coordinate system.
- The maximum Euclidean distance between the centroids of these convex hulls is calculated, as exemplified in Figure 10a.
- CBH is ascertained through segmented regression, pinpointing the height at which the regression slope experiences a pronounced increase, often indicative of the presence of branches.
- Points situated above the CBH are categorized as part of the tree crown, as depicted in Figure 10b, and are employed for calculating the crown diameter (CD) using the formula defined in Equation (4), where ‘S’ denotes the crown projection area.
2.2.4. Calculation and Estimation Methods for DBH
- Method for Calculating DBH Based on Point Clouds
- The single-tree point cloud is first corrected, and at a vertical distance of 1.25–1.35 m above the lowest point in the corrected single-tree point cloud, the trunk point cloud is sliced, as depicted in Figure 11a.
- Points within the tree slice are projected onto the x–y plane, convex hulls are computed to generate two polygons, and Gaussian smoothing is applied to them to better fit the actual trunk slice. It is assumed that the trunk boundary lies between the “inner” and “outer” polygon boundaries, as illustrated in Figure 11b.
- Ten sets of perpendicular lines, passing through the centroids of the “inner” and “outer” contours, are randomly generated. Each set of lines takes the form of D1 and D2, as shown in Figure 11c. The average of D1 and D2 for each set is considered one measurement.
- The mean square error is computed for the ten measurements. If the mean square error exceeds the slice thickness, the slice point cloud is deemed incomplete or inadequate for representing the trunk, and the DBH estimation for that instance is discarded. Otherwise, the average of the ten measurements is taken as the final DBH measurement, as illustrated in Figure 11c.

- Method for DBH Estimation Based on Tree Height and Crown Diameter
- Method for Augmenting and Correcting ULS Point Cloud Sample Data
- 1.
- Pairwise Point Cloud Matching and High-Precision Sampling
- 2.
- Processing ULS Point Clouds
- Sample Precision and Regression Enhancement
3. Results
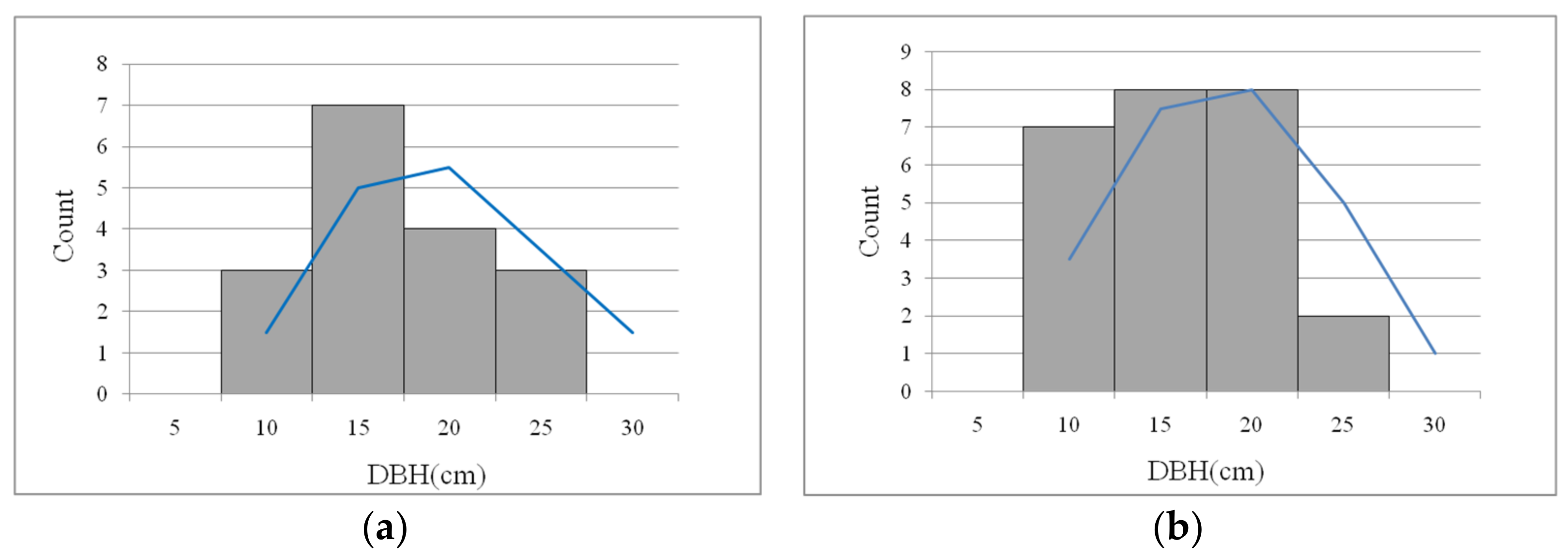
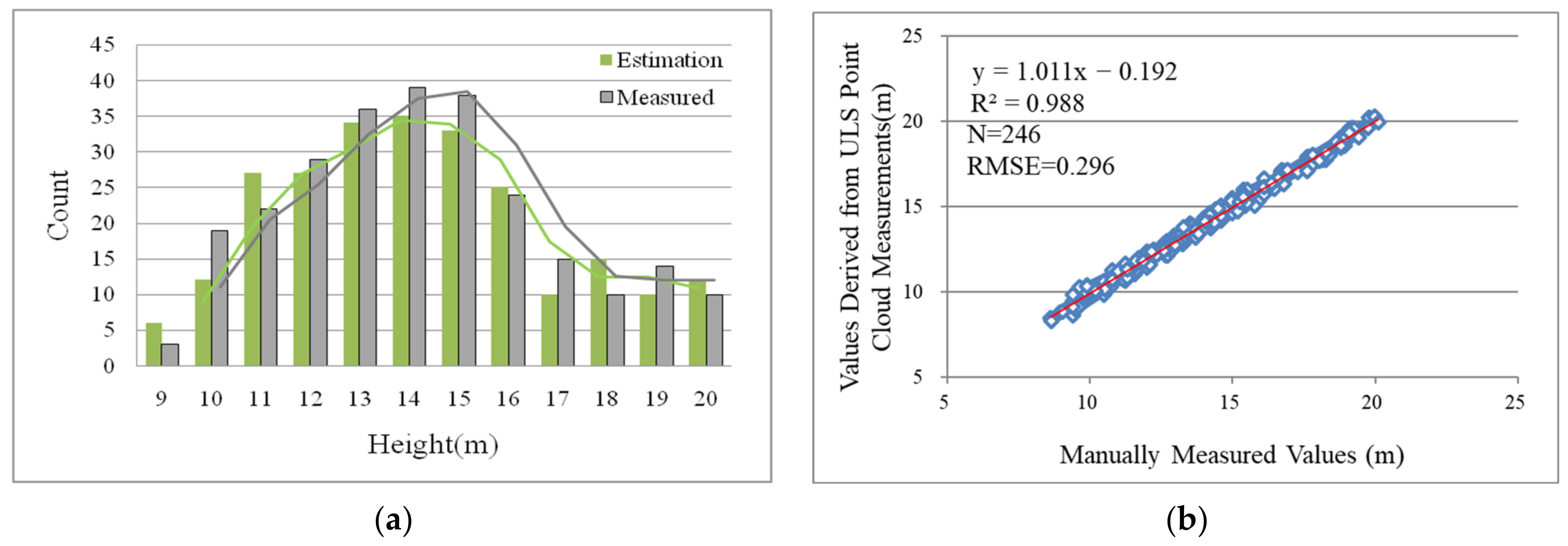
3.1. Experimental Results on Chinese Scots Pine Plot
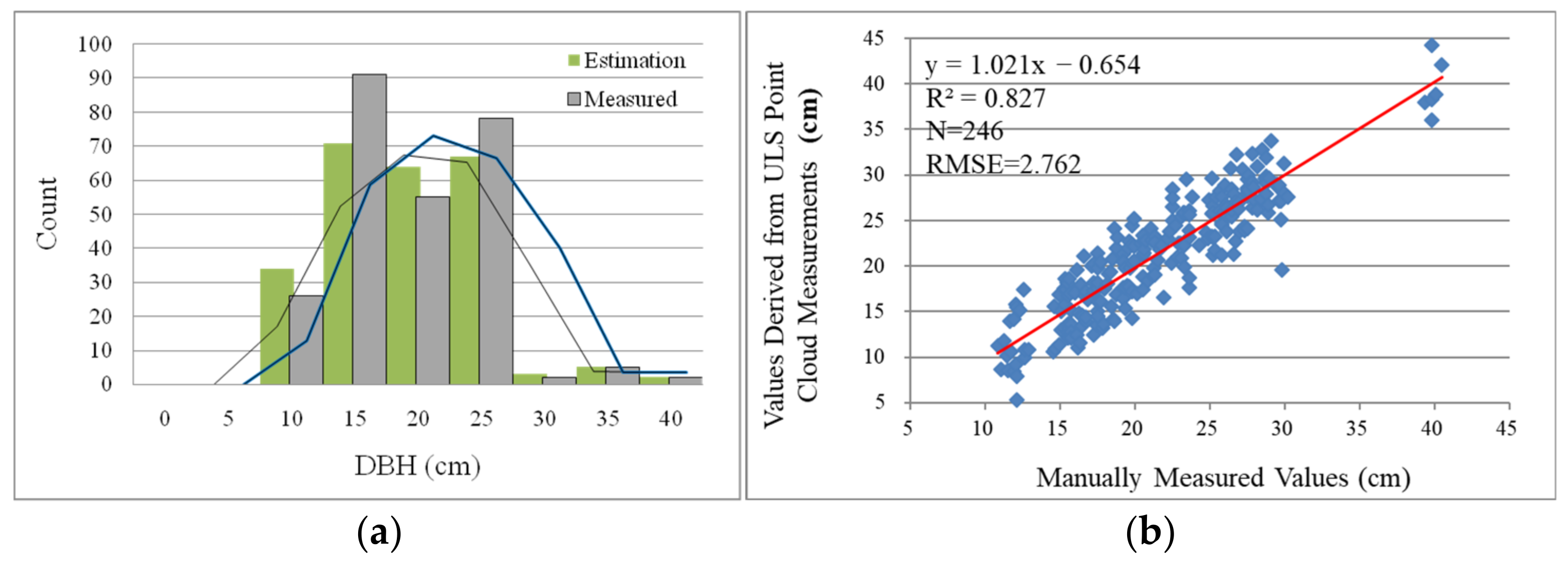
3.2. Experimental Results on Mongolian Oak Plot
4. Discussion
4.1. Selection of Experimental Plots
4.2. Tree Height Measurement Performance Based on ULS Point Clouds
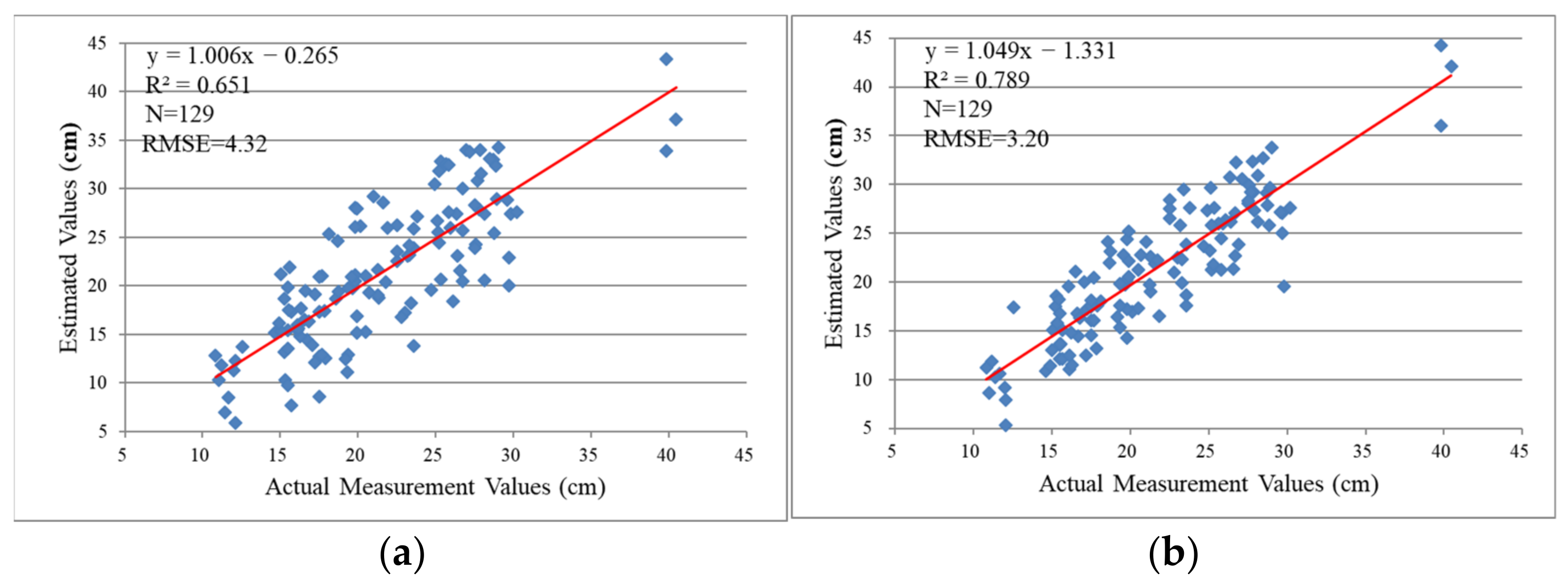
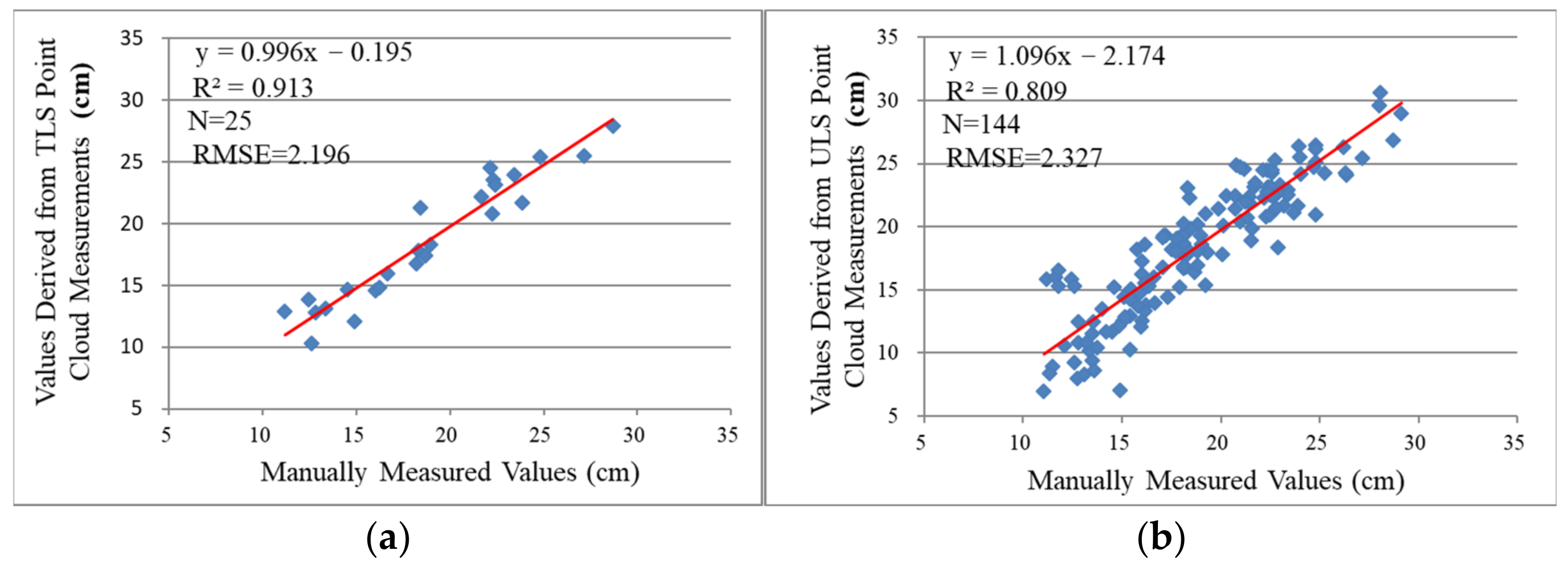
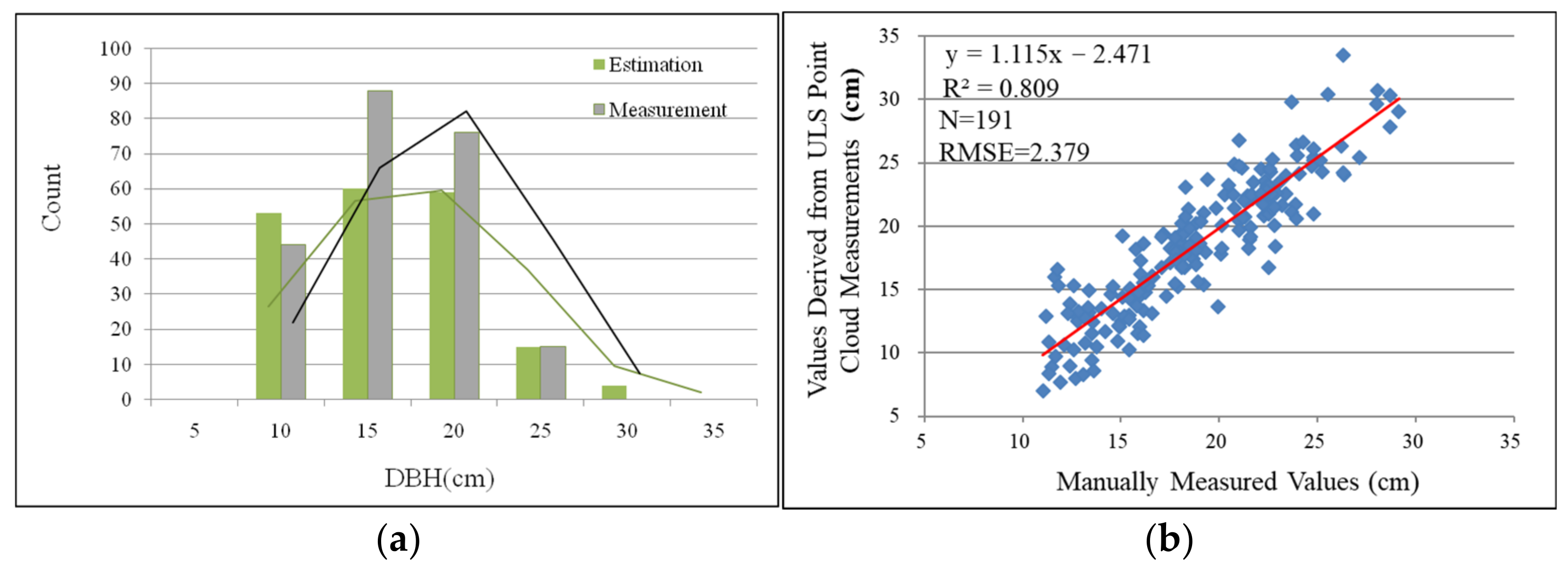
4.3. Diameter Measurement and Estimation Performance
4.4. Diameter Prediction Performance Based on Point Cloud Measurement Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Liu, J.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Zhu, L.; Liang, X.; Wang, Y.; Hyyppä, H. A novel GNSS technique for predicting boreal forest attributes at low cost. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4855–4867. [Google Scholar] [CrossRef]
- Zasada, M.; Sterenczak, K.; Dudek, W.M.; Rybski, A. Horizon Visibility and Accuracy of Stocking Determination on Circular Sample Plots Using Automated Remote Measurement Techniques. For. Ecol. Manag. 2013, 302, 171–177. [Google Scholar] [CrossRef]
- Wężyk, P.; Hawryło, P.; Szostak, M.; Zięba-Kulawik, K.; Winczek, M.; Siedlarczyk, E.; Kurzawiński, A.; Rydzyk, J.; Kmiecik, J.; Gilewski, W.; et al. Using LiDAR Point Clouds in Determination of the Scots Pine Stands Spatial Structure Meaning in the Conservation of Lichen Communities in “Bory Tucholskie” National Park. Arch. Photogramm. Cartogr. Remote Sens. 2019, 31, 85–103. [Google Scholar] [CrossRef]
- Wang, R.; Xu, Y.; Sotelo, M.A.; Ma, Y.; Sarkodie-Gyan, T.; Li, Z.; Li, W. A Robust Registration Method for Autonomous Driving Pose Estimation in Urban Dynamic Environment Using LiDAR. Electronics 2019, 8, 43. [Google Scholar] [CrossRef]
- Dassot, M.; Colin, A.; Santenoise, P.; Fournier, M.; Constant, T. Terrestrial laser scanning for measuring the solid wood volume, including branches, of adult standing trees in the forest environment. Comput. Electron. Agric. 2012, 89, 86–93. [Google Scholar] [CrossRef]
- Disney, M.I.; Boni Vicari, M.; Burt, A.; Calders, K.; Lewis, S.L.; Raumonen, P.; Wilkes, P. Weighing trees with lasers: Advances, challenges and opportunities. Interface Focus 2018, 8, 20170048. [Google Scholar] [CrossRef]
- Næsset, E.; Gobakken, T.; Solberg, S.; Gregoire, T.G.; Nelson, R.; Ståhl, G.; Weydahl, D. Model-assisted regional forest biomass estimation using LiDAR and InSAR as auxiliary data: A case study from a boreal forest area. Remote Sens. Environ. 2011, 115, 3599–3614. [Google Scholar] [CrossRef]
- Tauri, A.; Lang, M. Estimation of canopy cover in dense mixed-species forests using airborne lidar data. Eur. J. Remote Sens. 2018, 51, 132–141. [Google Scholar]
- Smith, A.M.; Falkowski, M.J.; Hudak, A.T.; Evans, J.S.; Robinson, A.P.; Steele, C.M. A cross-comparison of field, spectral, and lidar estimates of forest canopy cover. Can. J. Remote Sens. 2009, 35, 447–459. [Google Scholar] [CrossRef]
- Bruggisser, M.; Hollaus, M.; Otepka, J.; Pfeifer, N. Influence of ULS acquisition characteristics on tree stem parameter estimation. ISPRS J. Photogramm. Remote Sens. 2020, 168, 28–40. [Google Scholar] [CrossRef]
- Liu, G.; Wang, J.; Dong, P.; Chen, Y.; Liu, Z. Estimating Individual Tree Height and Diameter at Breast Height (DBH) from Terrestrial Laser Scanning (TLS) Data at Plot Level. Forests 2018, 9, 398. [Google Scholar] [CrossRef]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Vastaranta, M.; Yrttimaa, T.; Saarinen, N.; Yu, X.; Karjalainen, M.; Nurminen, K.; Karila, K.; Kankare, V.; Luoma, V.; Pyörälä, J.; et al. Airborne Laser Scanning Outperforms the Alternative 3D Techniques in Capturing Variation in Tree Height and Forest Density in Southern Boreal Forests. Balt. For. 2018, 24, 268–277. [Google Scholar]
- Naesset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surový, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel Low-Cost Mobile Mapping Systems for Forest Inventories as Terrestrial Laser Scanning Alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple IPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Henning, J.G.; Radtke, P.J. Detailed stem measurements of standing trees from ground-based scanning Lidar. For. Sci. 2006, 52, 67–80. [Google Scholar]
- Maas, H.G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic Stem Mapping Using Single-Scan Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Donager, J.J.; Sankey, T.T.; Sankey, J.B.; Sanchez Meador, A.J.; Springer, A.E.; Bailey, J.D. Examining Forest Structure with Terrestrial Lidar: Suggestions and Novel Techniques Based on Comparisons Between Scanners and Forest Treatments. Earth Space Sci. 2018, 5, 753–776. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Honkavaara, E.; Liu, J. Forest Data Collection Using Terrestrial Image-Based Point Clouds from a Handheld Camera Compared to Terrestrial and Personal Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Stovall, A.E.L.; Shugart, H.H. Improved Biomass Calibration and Validation with Terrestrial LiDAR: Implications for Future LiDAR and SAR Missions. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3527–3537. [Google Scholar] [CrossRef]
- Krisanski, S.; Taskhiri, M.; Turner, P. Enhancing Methods for Under-Canopy Unmanned Aircraft System Based Photogrammetry in Complex Forests for Tree Diameter Measurement. Remote Sens. 2020, 12, 1652. [Google Scholar] [CrossRef]
- Stovall, A.E.; Vorster, A.G.; Anderson, R.S.; Evangelista, P.H.; Shugart, H.H. Non-destructive aboveground biomass estimation of coniferous trees using terrestrial LiDAR. Remote Sens. Environ. 2017, 200, 31–42. [Google Scholar] [CrossRef]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; de Tanago, J.G. Data acquisition considerations for Terrestrial Laser Scanning of forest plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Saarinen, N.; Kankare, V.; Vastaranta, M.; Luoma, V.; Pyörälä, J.; Tanhuanpää, T.; Liang, X.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Schneider, F.D.; Kükenbrink, D.; Schaepman, M.E.; Schimel, D.S.; Morsdorf, F. Quantifying 3D structure and occlusion in dense tropical and temperate forests using close-range LiDAR. Agric. For. Meteorol. 2019, 268, 249–257. [Google Scholar] [CrossRef]
- Yrttimaa, T.; Saarinen, N.; Kankare, V.; Viljanen, N.; Hynynen, J.; Huuskonen, S.; Holopainen, M.; Hyyppä, J.; Honkavaara, E.; Vastaranta, M. Multisensorial Close-Range Sensing Generates Benefits for Characterization of Managed Scots Pine (Pinus sylvestris L.). Stands. Int. J. Geo-Inf. 2020, 9, 309. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, A.; Honkavaara, E.; Issaoui, A.E.; Nevalainen, O.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef]
- Wallace, L.; Musk, R.; Lucieer, A. An Assessment of the Repeatability of Automatic Forest Inventory Metrics Derived From UAV-Borne Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7160–7169. [Google Scholar] [CrossRef]
- Balsi, M.; Esposito, S.; Fallavollita, P.; Nardinocchi, C. Single-tree detection in high-density LiDAR data from UAV-based survey. Eur. J. Remote Sens. 2018, 51, 679–692. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating Tree Detection and Segmentation Routines on Very High Resolution UAV LiDAR Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Wieser, M.; Mandlburger, G.; Hollaus, M.; Otepka, J.; Glira, P.; Pfeifer, N. A Case Study of UAS Borne Laser Scanning for Measurement of Tree Stem Diameter. Remote Sens. 2017, 9, 1154. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Cao, L. Individual Tree Structural Parameter Extraction and Volume Table Creation Based on Near-Field LiDAR Data: A Case Study in a Subtropical Planted Forest. Sensors 2021, 21, 8162. [Google Scholar]
- Fekry, R.; Yao, W.; Cao, L.; Shen, X. Ground-based/UAV-LiDAR data fusion for quantitative structure modeling and tree parameter retrieval in subtropical planted forest. For. Ecosyst. 2022, 9, 18. [Google Scholar] [CrossRef]
- Terryn, L.; Calders, K.; Bartholomeus, H.; Bartolo, R.E.; Brede, B.; D’hont, B.; Disney, M.; Herold, M.; Lau, A.; Shenkin, A.; et al. Quantifying tropical forest structure through terrestrial and UAV laser scanning fusion in Australian rainforests. Remote Sens. Environ. 2022, 271, 112912. [Google Scholar] [CrossRef]
- Mandlburger, G.; Kölle, M.; Pöppl, F.; Cramer, M. EVALUATION OF CONSUMER-GRADE AND SURVEY-GRADE UAV-LIDAR. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, 48, 99–106. [Google Scholar] [CrossRef]
- Cai, S.; Zhang, W.; Liang, X.; Wan, P.; Qi, J.; Yu, S.; Yan, G.; Shao, J. Filtering Airborne LiDAR Data Through Complementary Cloth Simulation and Progressive TIN Densification Filters. Remote Sens. 2019, 11, 1037. [Google Scholar] [CrossRef]
- Windrim, L.; Bryson, M. Detection, Segmentation, and Model Fitting of Individual Tree Stems from Airborne Laser Scanning of Forests Using Deep Learning. Remote Sens. 2020, 12, 1469. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–27 July 2017; pp. 77–85. [Google Scholar]
- Brede, B.; Terryn, L.; Barbier, N.; Bartholomeus, H.M.; Bartolo, R.; Calders, K.; Derroire, G.; Moorthy, S.M.K.; Lau, A.; Levick, S.R.; et al. Non-destructive estimation of individual tree biomass: Allometric models, terrestrial and UAV laser scanning. Remote Sens. Environ. Interdiscip. J. 2022, 280, 113180. [Google Scholar] [CrossRef]
- Du, S.; Lindenbergh, R.; Ledoux, H.; Stoter, J.; Nan, L. AdTree: Accurate, Detailed, and Automatic Modelling of Laser-Scanned Trees. Remote Sens. 2019, 11, 2074. [Google Scholar] [CrossRef]
- Schneider, R.; Calama, R.; Martin-Ducup, O. Understanding Tree-to-Tree Variations in Stone Pine (Pinus Pinea L.) Cone Production Using Terrestrial Laser Scanner. Remote Sens. 2020, 12, 173. [Google Scholar]
- Jucker, T.; Caspersen, J.; Chave, J.; Antin, C.; Barbier, N.; Bongers, F.; Dalponte, M.; van Ewijk, K.Y.; Forrester, D.I.; Haeni, M.; et al. Allometric Equations for Integrating Remote Sensing Imagery into Forest Monitoring Programmes. Glob. Change Biol. 2017, 23, 177–190. [Google Scholar] [CrossRef] [PubMed]
- Bogdanovich, E.; Perez-Priego, O.; El-Madany, T.S.; Guderle, M.; Pacheco-Labrador, J.; Levick, S.R.; Moreno, G.; Carrara, A.; Martín, M.P.; Migliavacca, M. Using terrestrial laser scanning for characterizing tree structural parameters and their changes under different management in a Mediterranean open woodland. For. Ecol. Manag. 2021, 486, 118945. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment Parameters | Scanning Configuration |
|---|---|
| Flight altitude | 35 m |
| Flight speed | 3 m/s |
| Point cloud density | 1772 points/m2 |
| Flight strip overlap | 65% |
| Heading angle | 28° |
| Echo mode | Triple |
| Sampling rate | 160 kHz |
| Scanning mode | Repeat |
| Data Categories | Parameters | Manual Measurement Values (cm) | Values Estimated from ULS/TLS Point Clouds (cm) |
|---|---|---|---|
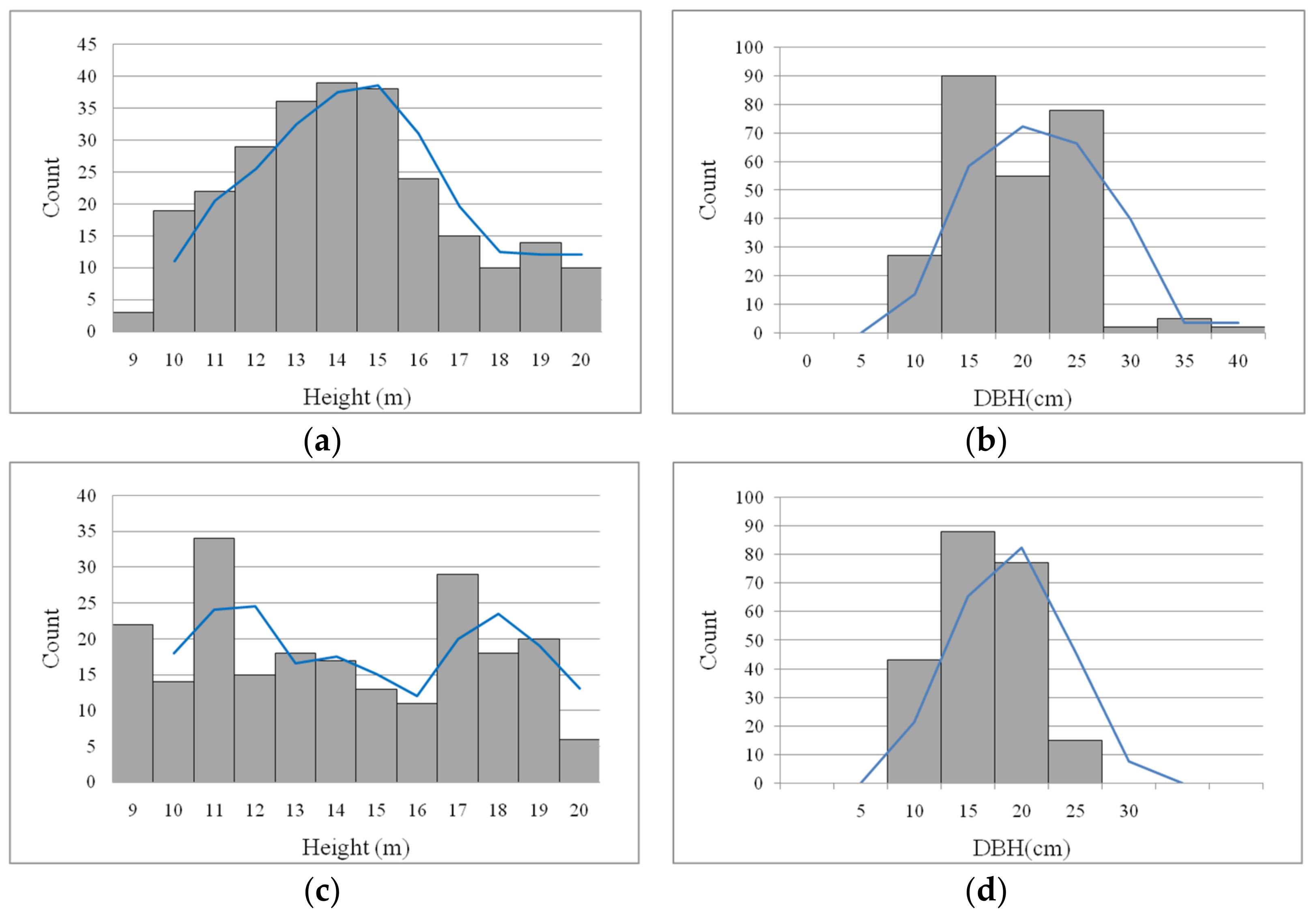
| Height | Mean | 13.71 | 13.70 |
| Median | 13.65 | 13.44 | |
| Maximum | 20.10 | 20.29 | |
| Minimum | 8.61 | 8.28 | |
| DBH | Mean | 21.50 | 21.31 |
| Median | 20.65 | 21.28 | |
| Maximum | 40.46 | 44.24 | |
| Minimum | 10.83 | 5.29 | |
| Number of trees | 259 | 24,695 (%) |
| Data Categories | Parameters | Manual Measurement Values (cm) | Values Estimated from ULS/TLS Point Clouds (cm) |
|---|---|---|---|
| Height | Mean | 13.72 | 13.77 |
| Median | 13.53 | 13.48 | |
| Maximum | 22.99 | 23.26 | |
| Minimum | 6.21 | 3.97 | |
| DBH | Mean | 18.88 | 18.62 |
| Median | 18.48 | 19.06 | |
| Maximum | 29.35 | 34.41 | |
| Minimum | 11.04 | 7.00 | |
| Number of trees | 223 | 191 (85.6%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Chen, G.; Zhang, S.; Jing, W. An Automated Pipeline for Extracting Forest Structural Parameters by Integrating UAV and Ground-Based LiDAR Point Clouds. Forests 2023, 14, 2179. https://doi.org/10.3390/f14112179
Xu D, Chen G, Zhang S, Jing W. An Automated Pipeline for Extracting Forest Structural Parameters by Integrating UAV and Ground-Based LiDAR Point Clouds. Forests. 2023; 14(11):2179. https://doi.org/10.3390/f14112179
Chicago/Turabian StyleXu, Dali, Guangsheng Chen, Shuming Zhang, and Weipeng Jing. 2023. "An Automated Pipeline for Extracting Forest Structural Parameters by Integrating UAV and Ground-Based LiDAR Point Clouds" Forests 14, no. 11: 2179. https://doi.org/10.3390/f14112179