
Supporting Operational Tree Marking Activities through Airborne LiDAR Data in the Frame of Sustainable Forest Management




Abstract
:1. Introduction
2. Materials and Methods
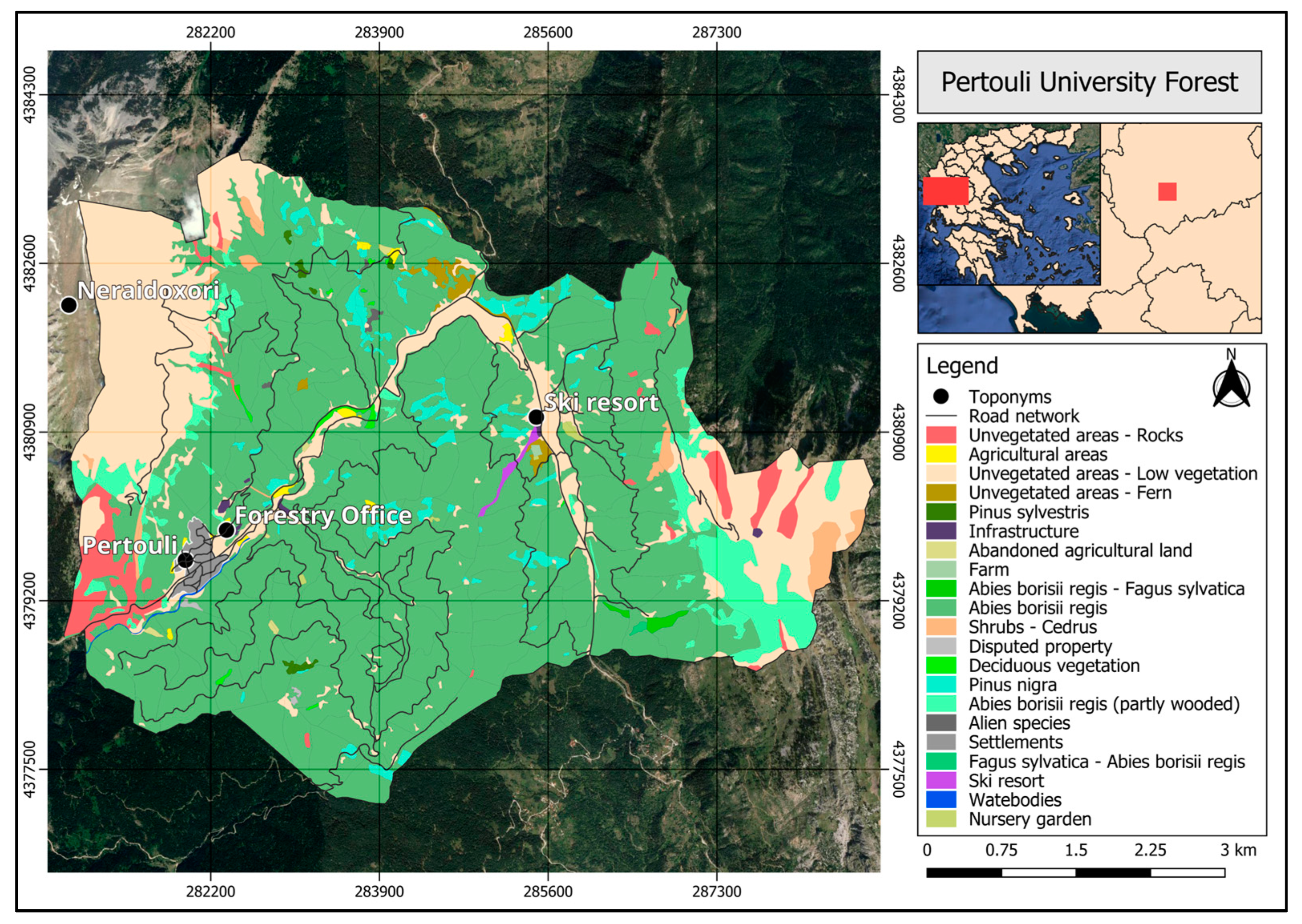
2.1. Study Area
2.2. Dataset Description
2.2.1. Airborne LiDAR Data
2.2.2. Ground Inventory Data
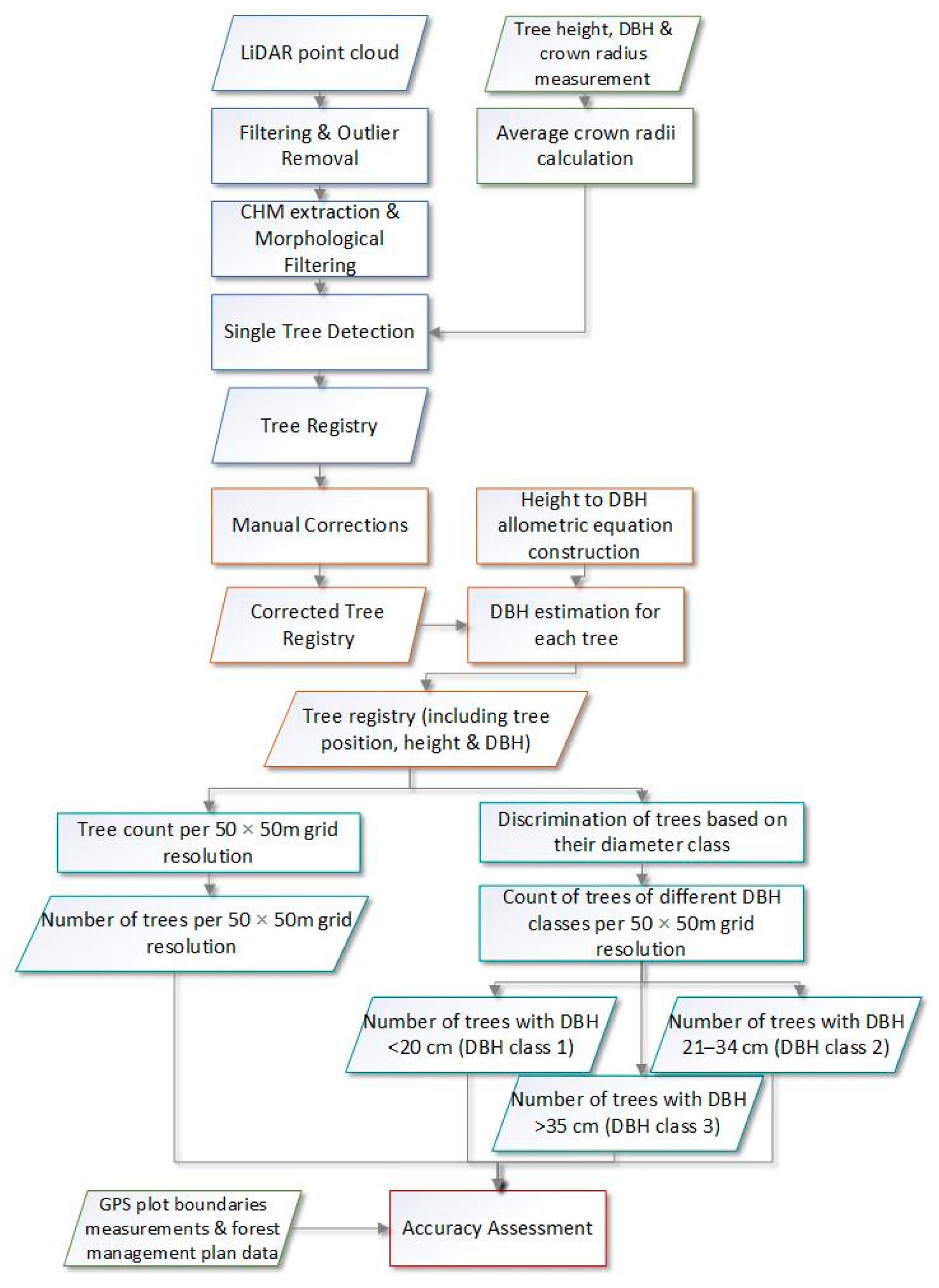
2.3. LiDAR Data Processing
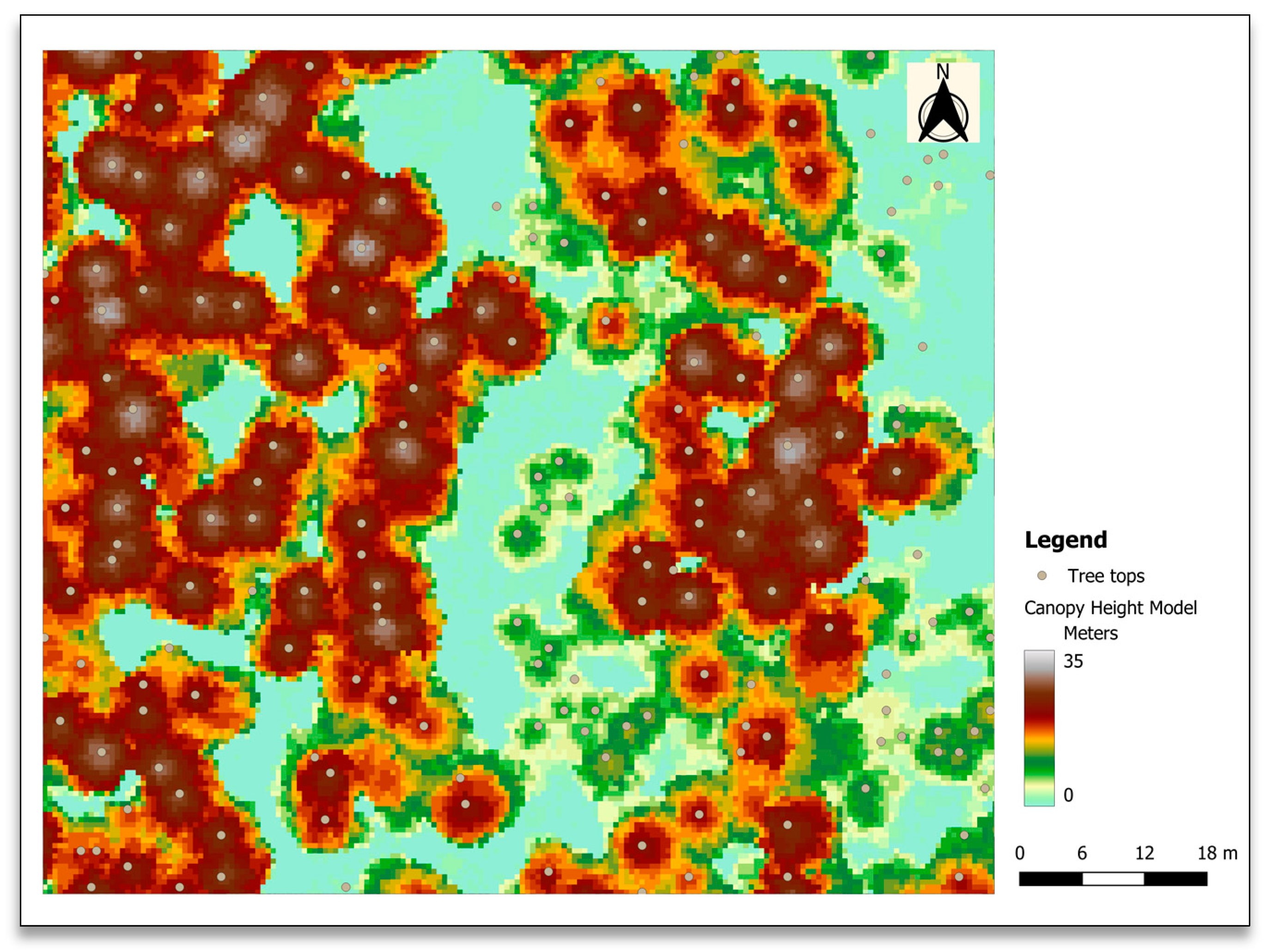
2.3.1. Tree Registry Generation
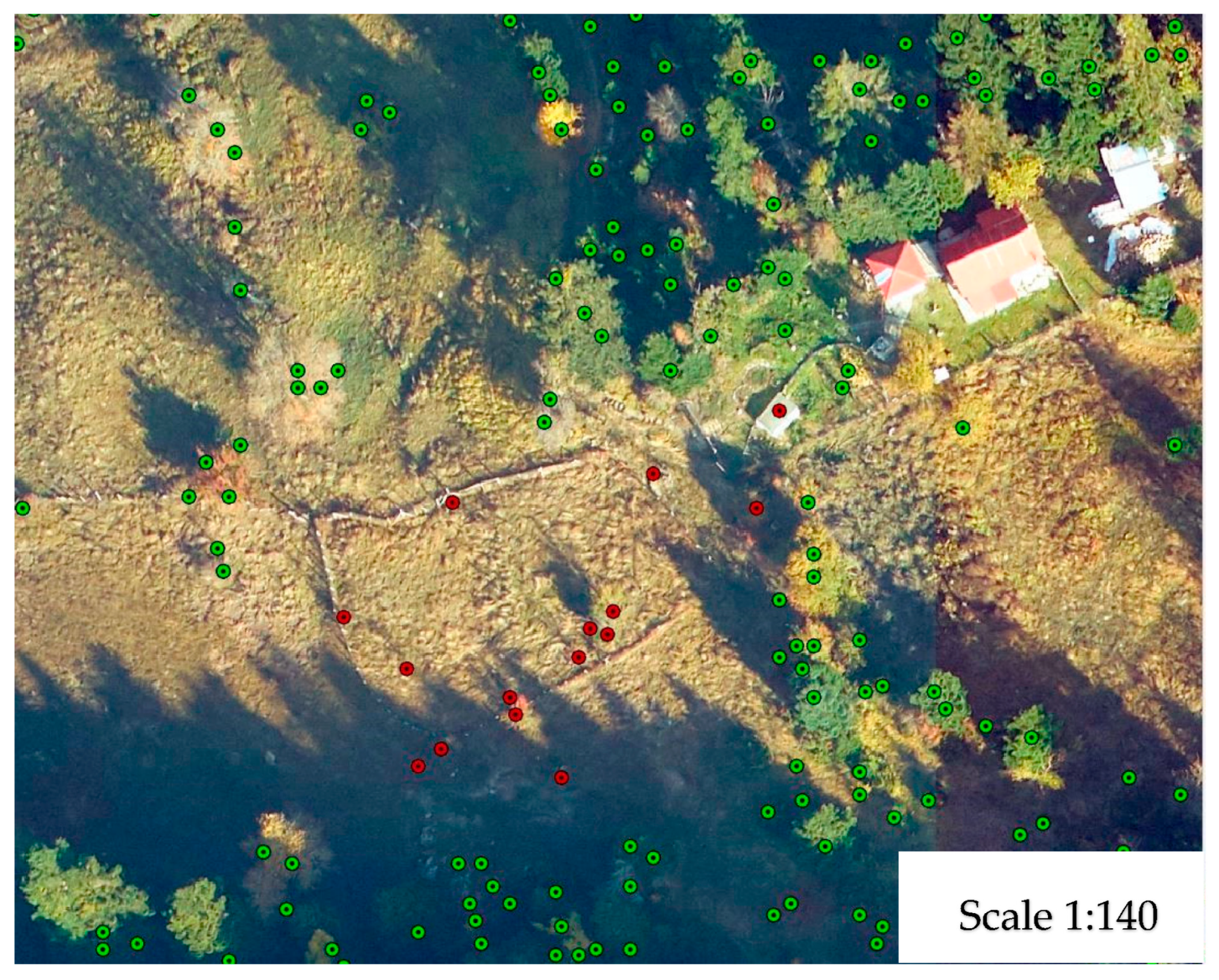
2.3.2. Tree Registry Evaluation and Manual Correction
2.3.3. Height to DBH Conversion Equation
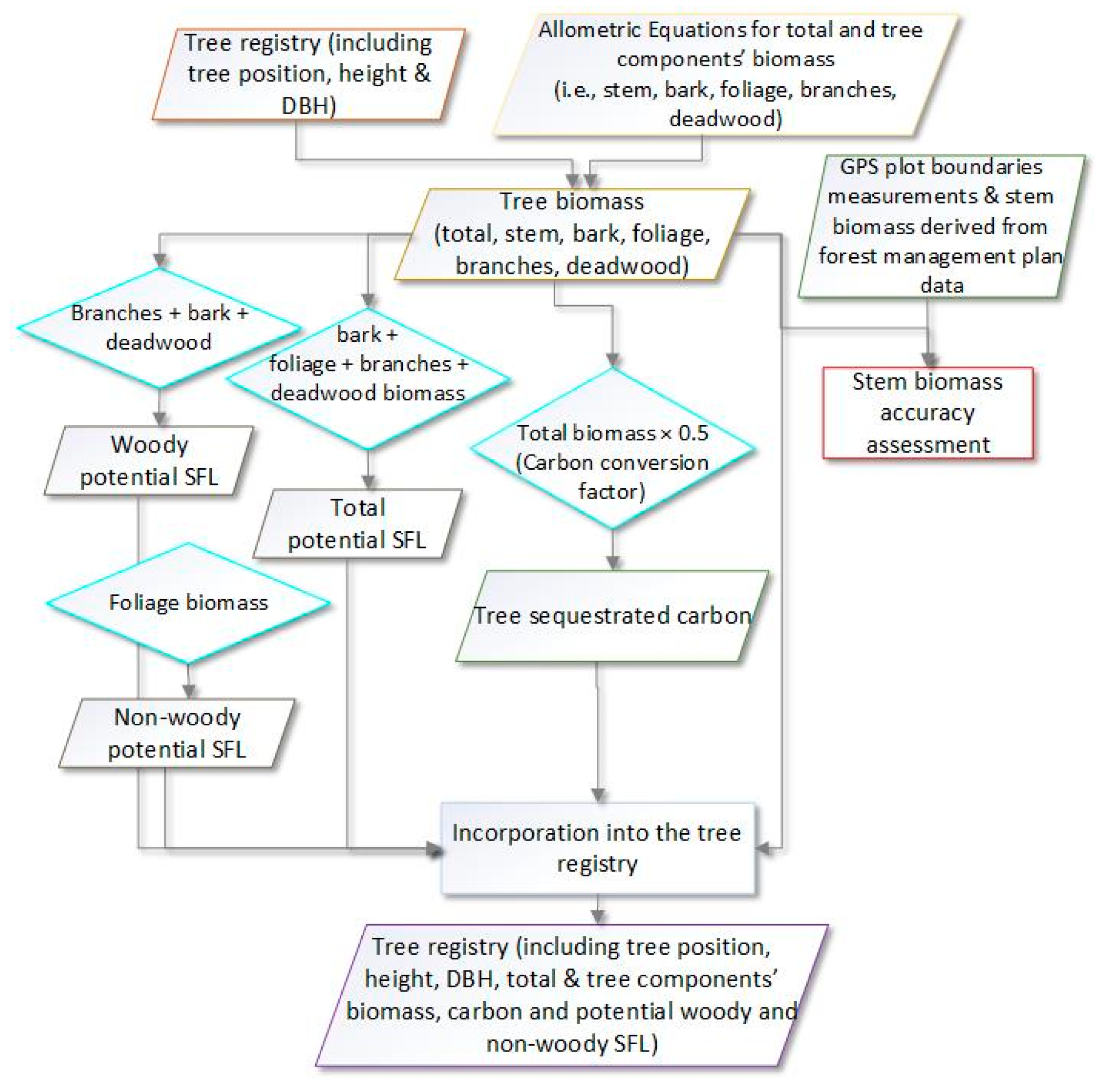
2.3.4. Estimation of Tree Parameters
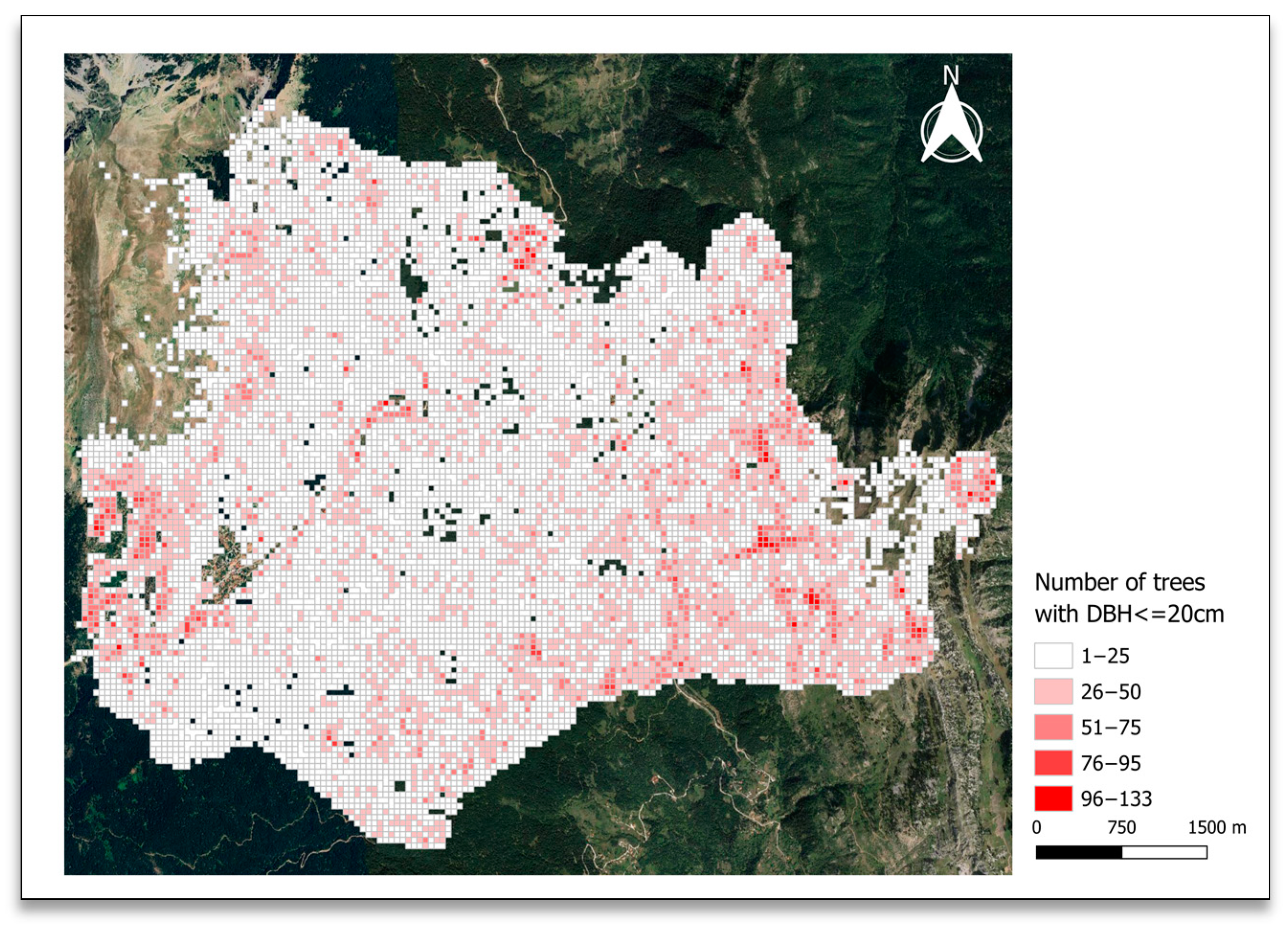
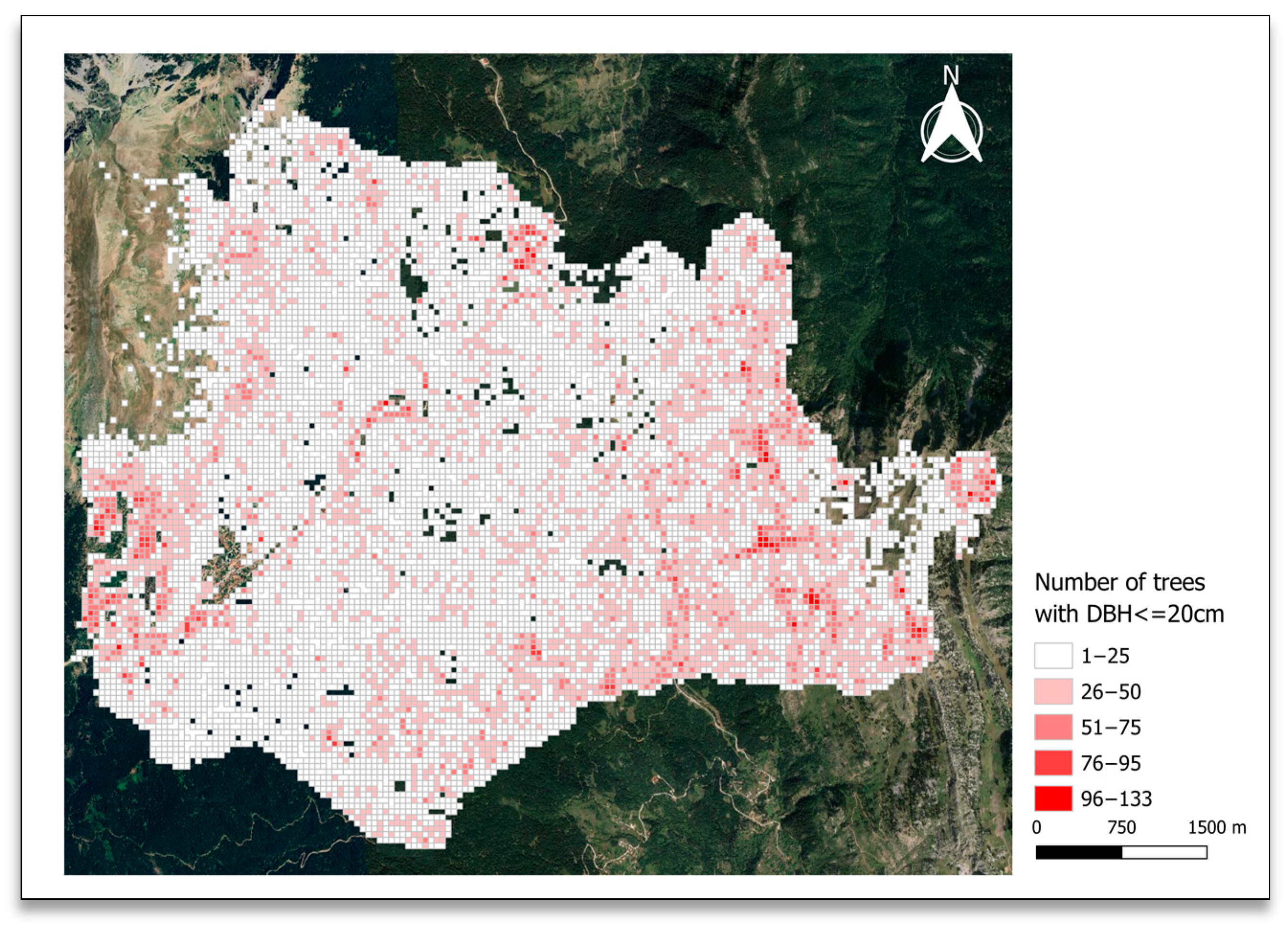
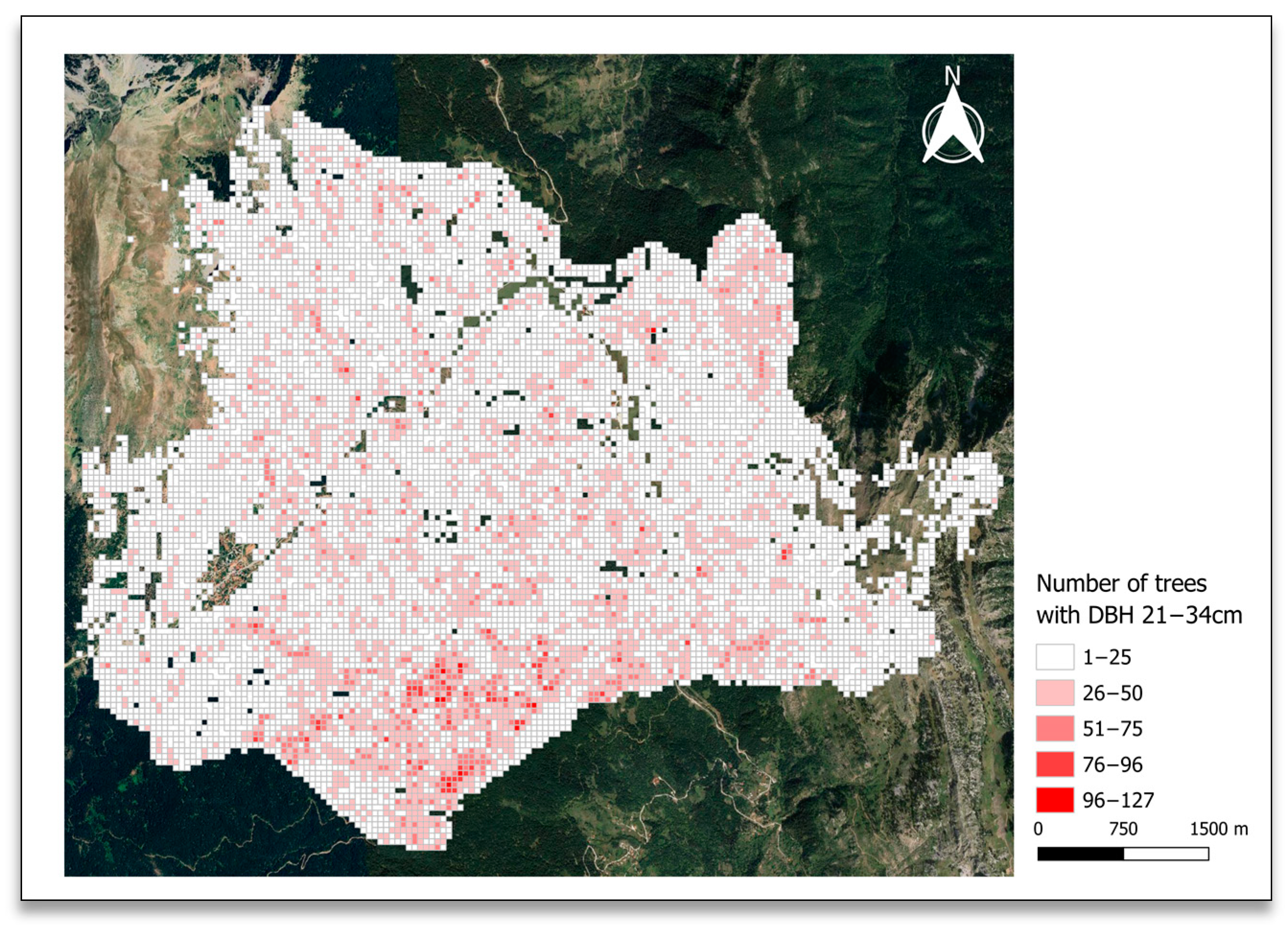
2.3.5. Tree Density Maps Generation
2.3.6. Accuracy Assessment
3. Results
3.1. Height to DBH Allometric Equation
3.2. Tree Registry and Tree Density Maps
3.3. Accuracy Assessment Results
4. Discussion
5. Conclusions
- The tree registry was manually corrected, resulting in the highest possible accuracy of the product itself and its derivatives (i.e., tree density maps);
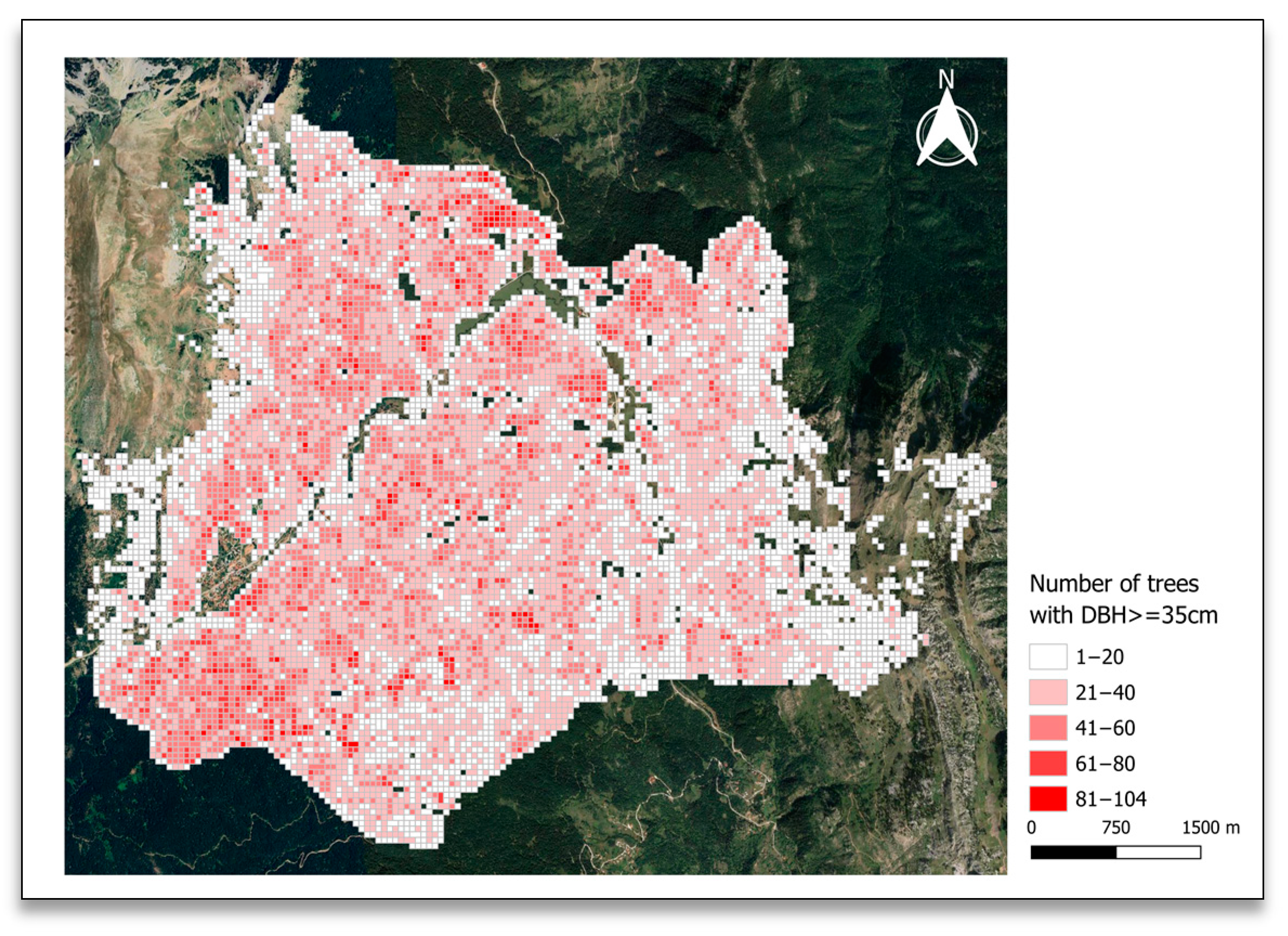
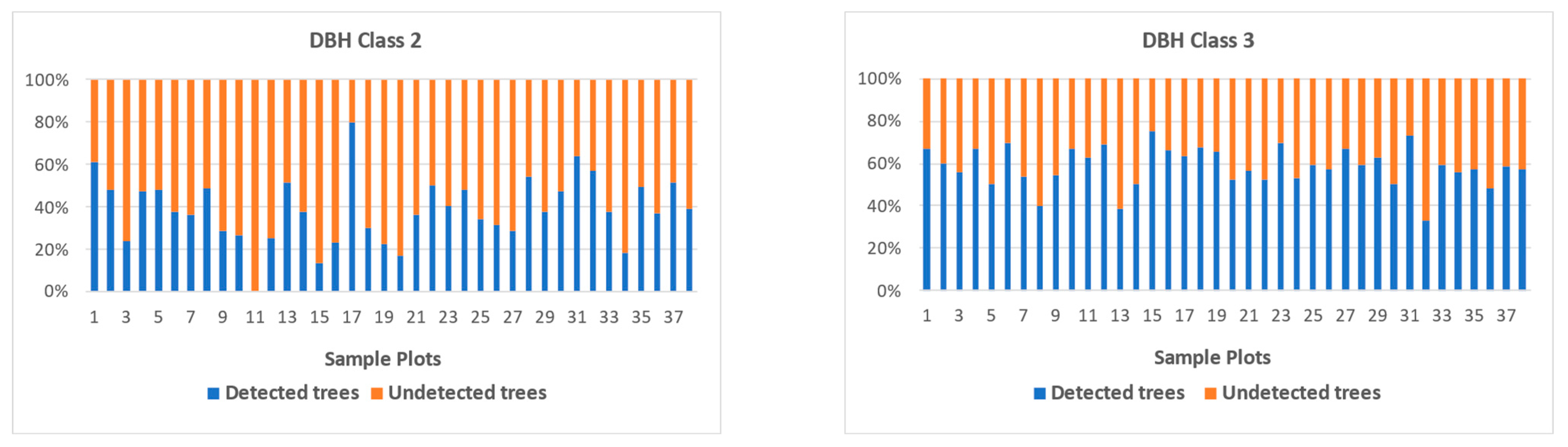
- The trees of DBH ≤ 20 cm (class 1) and DBH 21–34 cm (class 2) were not accurately detected due to the multi-layered structure of the forest. On the contrary, the DBH ≥ 35 cm trees were reliably identified since they are the dominant ones and fully detectable using the LiDAR sensor;
- Despite the LiDAR sensor’s low detection capability in areas with high tree density and small DBH classes, the map indicates the absence of co-dominant or dominant trees and the strong presence of regeneration. This provides the user with the ability to directly decide whether the respective area is considered suitable for harvest, as falling trees can severely damage regeneration trees during logging;
- The tree density map of DBH class 3 demonstrates high reliability, which is of utmost importance as this information is commonly used during cut-tree marking activities;
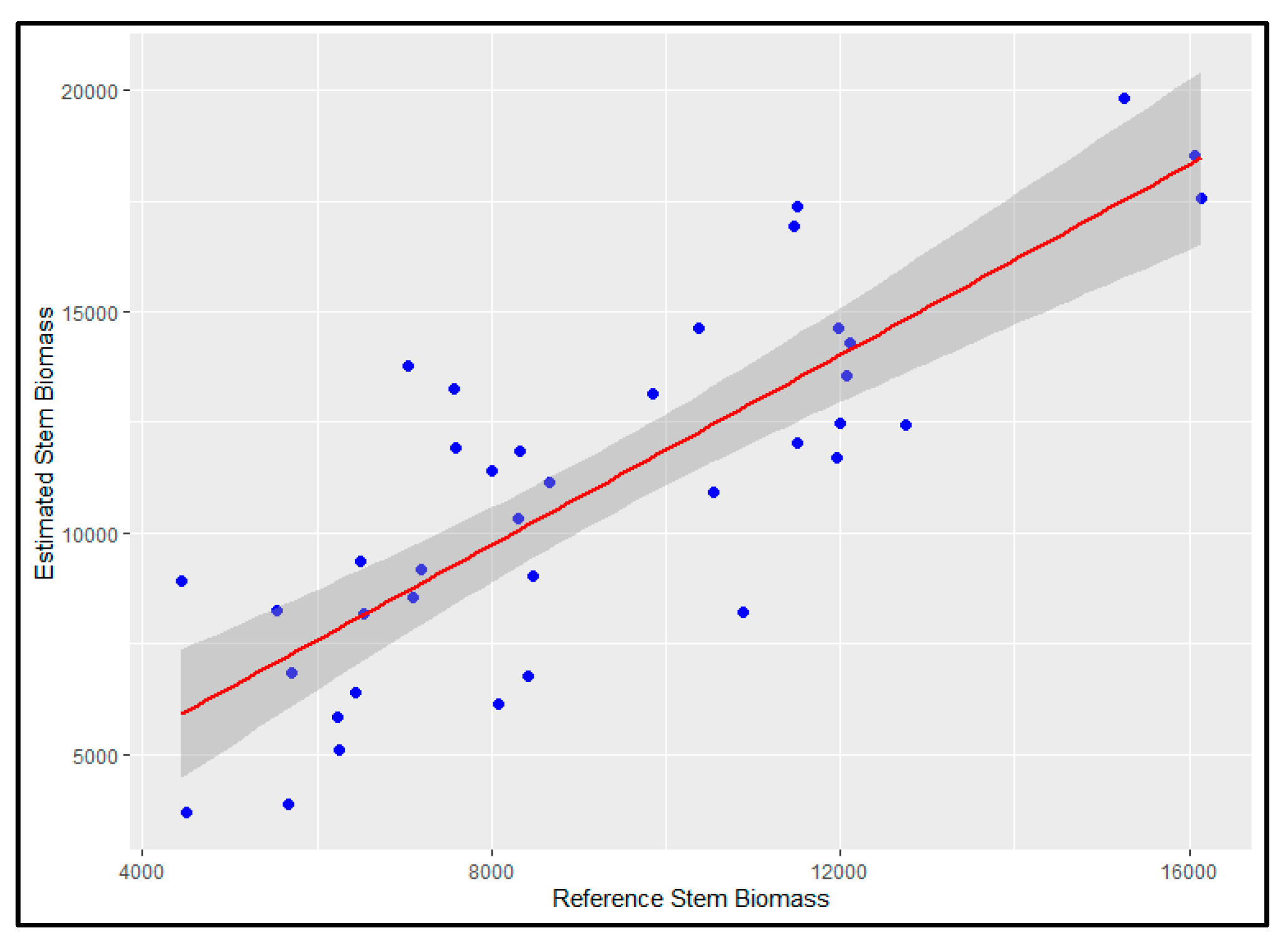
- Among the tree parameters that were additionally estimated and incorporated into the tree registry descriptive information, the stem biomass was assessed for its accuracy through its comparison with the respective data provided by the forest management plan (2018). The results showcased that the stem biomass was reliably estimated, presenting an R2 value of 0.67;
- Except for cut-tree marking and harvesting activities, all products generated within the context of this work can be employed for various other environmental management purposes, such as the development and adoption of climate mitigation and adaptation strategies, as well as monitoring biotic and abiotic components of forest ecosystems;
- Considering the common forest practice, the present work provides detailed guidelines for using the produced products (tree registry and tree density maps) to facilitate the process of selective cut-tree marking in terms of time and effort efficiency;
- The presented methods, results, and findings are experimental, and the methodology will be applied and evaluated during the next scheduled marking period by the University Forest Service (i.e., spring 2024).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nunes, L.J.R.; Meireles, C.I.R.; Pinto Gomes, C.J.; Almeida Ribeiro, N.M.C. Forest Management and Climate Change Mitigation: A Review on Carbon Cycle Flow Models for the Sustainability of Resources. Sustainability 2019, 11, 5276. [Google Scholar] [CrossRef]
- Ma, W.; Zhou, X.; Liang, J.; Zhou, M. Coastal Alaska Forests under Climate Change: What to Expect? For. Ecol. Manag. 2019, 448, 432–444. [Google Scholar] [CrossRef]
- Pörtner, H.-O.; Roberts, D.C.; Adams, H.; Adler, C.; Aldunce, P.; Ali, E.; Begum, R.A.; Betts, R.; Kerr, R.B.; Biesbroek, R. Climate Change 2022: Impacts, Adaptation and Vulnerability; IPCC: Geneva, Switzerland, 2022. [Google Scholar]
- Harris, N.L.; Gibbs, D.A.; Baccini, A.; Birdsey, R.A.; De Bruin, S.; Farina, M.; Fatoyinbo, L.; Hansen, M.C.; Herold, M.; Houghton, R.A.; et al. Global Maps of Twenty-First Century Forest Carbon Fluxes. Nat. Clim. Chang. 2021, 11, 234–240. [Google Scholar] [CrossRef]
- Thomas, J.; Brunette, M.; Leblois, A. The Determinants of Adapting Forest Management Practices to Climate Change: Lessons from a Survey of French Private Forest Owners. For. Policy Econ. 2022, 135, 102662. [Google Scholar] [CrossRef]
- Latterini, F.; Stefanoni, W.; Venanzi, R.; Tocci, D.; Picchio, R. GIS-AHP Approach in Forest Logging Planning to Apply Sustainable Forest Operations. Forests 2022, 13, 484. [Google Scholar] [CrossRef]
- Pichler, G.; Poveda Lopez, J.A.; Picchi, G.; Nolan, E.; Kastner, M.; Stampfer, K.; Kühmaier, M. Comparison of Remote Sensing Based RFID and Standard tree Marking for Timber Harvesting. Comput. Electron. Agric. 2017, 140, 214–226. [Google Scholar] [CrossRef]
- Eberhard, B.; Hasenauer, H. Tree Marking versus Tree Selection by Harvester Operator: Are There Any Differences in the Development of Thinned Norway Spruce Forests? Int. J. For. Eng. 2021, 32, 42–52. [Google Scholar] [CrossRef]
- Rainey, J. Digital Technology Enhances Tree Marking Effectiveness in Meeting Restoration Objectives in Southwestern Ponderosa Pine. Ph.D. Thesis, Northern Arizona University, Flagstaff, AZ, USA, 2021. [Google Scholar]
- Zianis, D.; Xanthopoulos, G.; Kalabokidis, K.; Kazakis, G.; Ghosn, D.; Roussou, O. Allometric Equations for Aboveground Biomass Estimation by Size Class for Pinus Brutia Ten. Trees Growing in North and South Aegean Islands, Greece. Eur. J. For. Res. 2011, 130, 145–160. [Google Scholar] [CrossRef]
- Saukkola, A.; Melkas, T.; Riekki, K.; Sirparanta, S.; Peuhkurinen, J.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Predicting Forest Inventory Attributes Using Airborne Laser Scanning, Aerial Imagery, and Harvester Data. Remote Sens. 2019, 11, 797. [Google Scholar] [CrossRef]
- Latifi, H.; Heurich, M. Multi-Scale Remote Sensing-Assisted Forest Inventory: A Glimpse of the State-of-the-Art and Future Prospects. Remote Sens. 2019, 11, 1260. [Google Scholar] [CrossRef]
- Hamedianfar, A.; Mohamedou, C.; Kangas, A.; Vauhkonen, J. Deep Learning for Forest Inventory and Planning: A Critical Review on the Remote Sensing Approaches so far and Prospects for Further Applications. For. Int. J. For. Res. 2022, 95, 451–465. [Google Scholar] [CrossRef]
- Latella, M.; Sola, F.; Camporeale, C. A Density-Based Algorithm for the Detection of Individual Trees from LiDAR Data. Remote Sens. 2021, 13, 322. [Google Scholar] [CrossRef]
- Eysn, L.; Hollaus, M.; Lindberg, E.; Berger, F.; Monnet, J.-M.; Dalponte, M.; Kobal, M.; Pellegrini, M.; Lingua, E.; Mongus, D.; et al. A Benchmark of Lidar-Based Single Tree Detection Methods Using Heterogeneous Forest Data from the Alpine Space. Forests 2015, 6, 1721–1747. [Google Scholar] [CrossRef]
- Wang, X.-H.; Zhang, Y.-Z.; Xu, M.-M. A Multi-Threshold Segmentation for Tree-Level Parameter Extraction in a Deciduous Forest Using Small-Footprint Airborne LiDAR Data. Remote Sens. 2019, 11, 2109. [Google Scholar] [CrossRef]
- Dai, W.; Yang, B.; Dong, Z.; Shaker, A. A New Method for 3D Individual Tree Extraction Using Multispectral Airborne LiDAR Point Clouds. ISPRS J. Photogramm. Remote Sens. 2018, 144, 400–411. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Yu, X.; Vastaranta, M.; Hyyppä, H.; Kukko, A.; Holopainen, M.; Heipke, C.; Hirschmugl, M.; Morsdorf, F.; et al. An International Comparison of Individual Tree Detection and Extraction Using Airborne Laser Scanning. Remote Sens. 2012, 4, 950–974. [Google Scholar] [CrossRef]
- Goldbergs, G.; Maier, S.; Levick, S.; Edwards, A. Efficiency of Individual Tree Detection Approaches Based on Light-Weight and Low-Cost UAS Imagery in Australian Savannas. Remote Sens. 2018, 10, 161. [Google Scholar] [CrossRef]
- Kandare, K.; Ørka, H.O.; Chan, J.C.-W.; Dalponte, M. Effects of Forest Structure and Airborne Laser Scanning Point Cloud Density on 3D Delineation of Individual Tree Crowns. Eur. J. Remote Sens. 2016, 49, 337–359. [Google Scholar] [CrossRef]
- Georgopoulos, N.; Gitas, I.Z.; Korhonen, L.; Antoniadis, K.; Stefanidou, A. Estimating Crown Biomass in a Multilayered Fir Forest Using Airborne LiDAR Data. Remote Sens. 2023, 15, 2919. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J.; Holmgren, J.; Pitkänen, J.; Solberg, S.; Wang, Y.; Weinacker, H.; Hauglin, K.M.; et al. Comparative Testing of Single-Tree Detection Algorithms Under Different Types of Forest. For. Int. J. For. Res. 2012, 85, 27–40. [Google Scholar] [CrossRef]
- Georgopoulos, N.; Gitas, I.Z.; Stefanidou, A.; Korhonen, L.; Stavrakoudis, D. Estimation of Individual Tree Stem Biomass in an Uneven-Aged Structured Coniferous Forest Using Multispectral LiDAR Data. Remote Sens. 2021, 13, 4827. [Google Scholar] [CrossRef]
- Leite, R.V.; Amaral, C.H.D.; Pires, R.D.P.; Silva, C.A.; Soares, C.P.B.; Macedo, R.P.; Silva, A.A.L.D.; Broadbent, E.N.; Mohan, M.; Leite, H.G. Estimating Stem Volume in Eucalyptus Plantations Using Airborne LiDAR: A Comparison of Area- and Individual Tree-Based Approaches. Remote Sens. 2020, 12, 1513. [Google Scholar] [CrossRef]
- Contreras, M.A.; Parsons, R.A.; Chung, W. Modeling Tree-Level Fuel Connectivity to Evaluate the Effectiveness of Thinning Treatments for Reducing Crown Fire Potential. For. Ecol. Manag. 2012, 264, 134–149. [Google Scholar] [CrossRef]
- Contreras, M.A.; Chung, W. Developing a Computerized Approach for Optimizing Individual Tree Removal to Efficiently Reduce Crown Fire Potential. For. Ecol. Manag. 2013, 289, 219–233. [Google Scholar] [CrossRef]
- Yan, F.; Ullah, M.R.; Gong, Y.; Feng, Z.; Chowdury, Y.; Wu, L. Use of a No Prism Total Station for Field Measurements in Pinus Tabulaeformis Carr. Stands in China. Biosyst. Eng. 2012, 113, 259–265. [Google Scholar] [CrossRef]
- Pommerening, A.; Pallarés Ramos, C.; Kędziora, W.; Haufe, J.; Stoyan, D. Rating Experiments in Forestry: How Much Agreement Is There in Tree Marking? PLoS ONE 2018, 13, e0194747. [Google Scholar] [CrossRef]
- Carrilho, A.C.; Galo, M.; Santos, R.C. Statistical Outlier Detection Method for Airborne Lidar Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII–1, 87–92. [Google Scholar] [CrossRef]
- Campbell, M.J.; Eastburn, J.F.; Mistick, K.A.; Smith, A.M.; Stovall, A.E.L. Mapping Individual Tree and Plot-Level Biomass Using Airborne and Mobile Lidar in Piñon-Juniper Woodlands. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103232. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Tu, J.; Yang, G.; Qi, P.; Ding, Z.; Mei, G. Comparative Investigation of Parallel Spatial Interpolation Algorithms for Building Large-Scale Digital Elevation Models. PeerJ Comput. Sci. 2020, 6, e263. [Google Scholar] [CrossRef] [PubMed]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.; Hussin, Y.A. Generating Pit-free Canopy Height Models from Airborne Lidar. Photogramm. Eng. Remote Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Kodors, S. Point Distribution as True Quality of LiDAR Point Cloud. Balt. J. Mod. Comput. 2017, 5, 362–378. [Google Scholar] [CrossRef]
- Vega, C.; Hamrouni, A.; El Mokhtari, S.; Morel, J.; Bock, J.; Renaud, J.-P.; Bouvier, M.; Durrieu, S. PTrees: A Point-Based Approach to Forest Tree Extraction from Lidar Data. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]
- Hu, X.; Chen, W.; Xu, W. Adaptive Mean Shift-Based Identification of Individual Trees Using Airborne LiDAR Data. Remote Sens. 2017, 9, 148. [Google Scholar] [CrossRef]
- Reitberger, J.; Schnörr, C.; Krzystek, P.; Stilla, U. 3D Segmentation of Single Trees Exploiting Full Waveform LIDAR Data. ISPRS J. Photogramm. Remote Sens. 2009, 64, 561–574. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.K.; Elberink, S.J.O.; Vosselman, G. Detection and Modelling of 3D Trees from Mobile Laser Scanning Data. In Proceedings of the ISPRS Commission V Mid-Term Symposium, Close Range Image Measurement Techniques, Newcastle, UK, 21–24 June 2010; pp. 520–525. [Google Scholar]
- Jeefoo, P. Wildfire Field Survey using Mobile GIS Technology in Nan Province. In Proceedings of the 2019 Joint International Conference on Digital Arts, Media and Technology with ECTI Northern Section Conference on Electrical, Electronics, Computer and Telecommunications Engineering (ECTI DAMT-NCON), Nan, Thailand, 30 January–2 February 2019; pp. 98–100. [Google Scholar]
- Ekhtari, N.; Glennie, C.; Fernandez-Diaz, J.C. Classification of Airborne Multispectral Lidar Point Clouds for Land Cover Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2068–2078. [Google Scholar] [CrossRef]
- İşcan, F.; Güler, E. Developing a Mobile GIS Application Related to the Collection of Land Data in Soil Mapping Studies. Int. J. Eng. Geosci. 2021, 6, 27–39. [Google Scholar] [CrossRef]
- Nowak, M.M.; Dziób, K.; Ludwisiak, Ł.; Chmiel, J. Mobile GIS Applications for Environmental Field Surveys: A State of the Art. Glob. Ecol. Conserv. 2020, 23, e01089. [Google Scholar] [CrossRef]
- Fan, G.; Chen, F.; Li, Y.; Liu, B.; Fan, X. Development and Testing of a New Ground Measurement Tool to Assist in Forest GIS Surveys. Forests 2019, 10, 643. [Google Scholar] [CrossRef]
- Poorazizi, E.; Alesheikh, A.; Behzadi, S. Developing a Mobile GIS for Field Geospatial Data Acquisition. Asian Netw. Sci. Inf. J. Appl. Sci. 2008, 8, 3279–3283. [Google Scholar] [CrossRef]
- Tsou, M.-H. Integrated Mobile GIS and Wireless Internet Map Servers for Environmental Monitoring and Management. Cartogr. Geogr. Inf. Sci. 2004, 31, 153–165. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equation | Parameters | RSE | R2 | AdjR2 | p-Value |
|---|---|---|---|---|---|
| Tree Height to DBH | a = −4.01594 b = 1.06188 | 0.1956 | 0.8834 | 0.8795 | 1.53 × 10−15 |
| Parameters | Maximum | Minimum | Average |
|---|---|---|---|
| Stem biomass | 4907.16 | 6.27 | 525.41 |
| Dead branches biomass | 13.33 | 0.05 | 2.41 |
| Needles biomass | 1.65 | 0.0009 | 0.17 |
| Branches biomass | 233.63 | 0.19 | 31.91 |
| Bark biomass | 129.54 | 0.37 | 16.51 |
| Total biomass | 5285.33 | 6.89 | 576.44 |
| Sequestrated carbon | 2642.67 | 3.44 | 288.22 |
| Potential total SFL | 378.17 | 0.62 | 51.02 |
| Potential woody SFL | 5283.68 | 6.89 | 576.26 |
| Potential non-woody SFL | 1.65 | 0.0009 | 0.17 |
| Variable | R2 | AdjR2 | RSE |
|---|---|---|---|
| Tree density (total) | 0.14 | 0.12 | 5.72 |
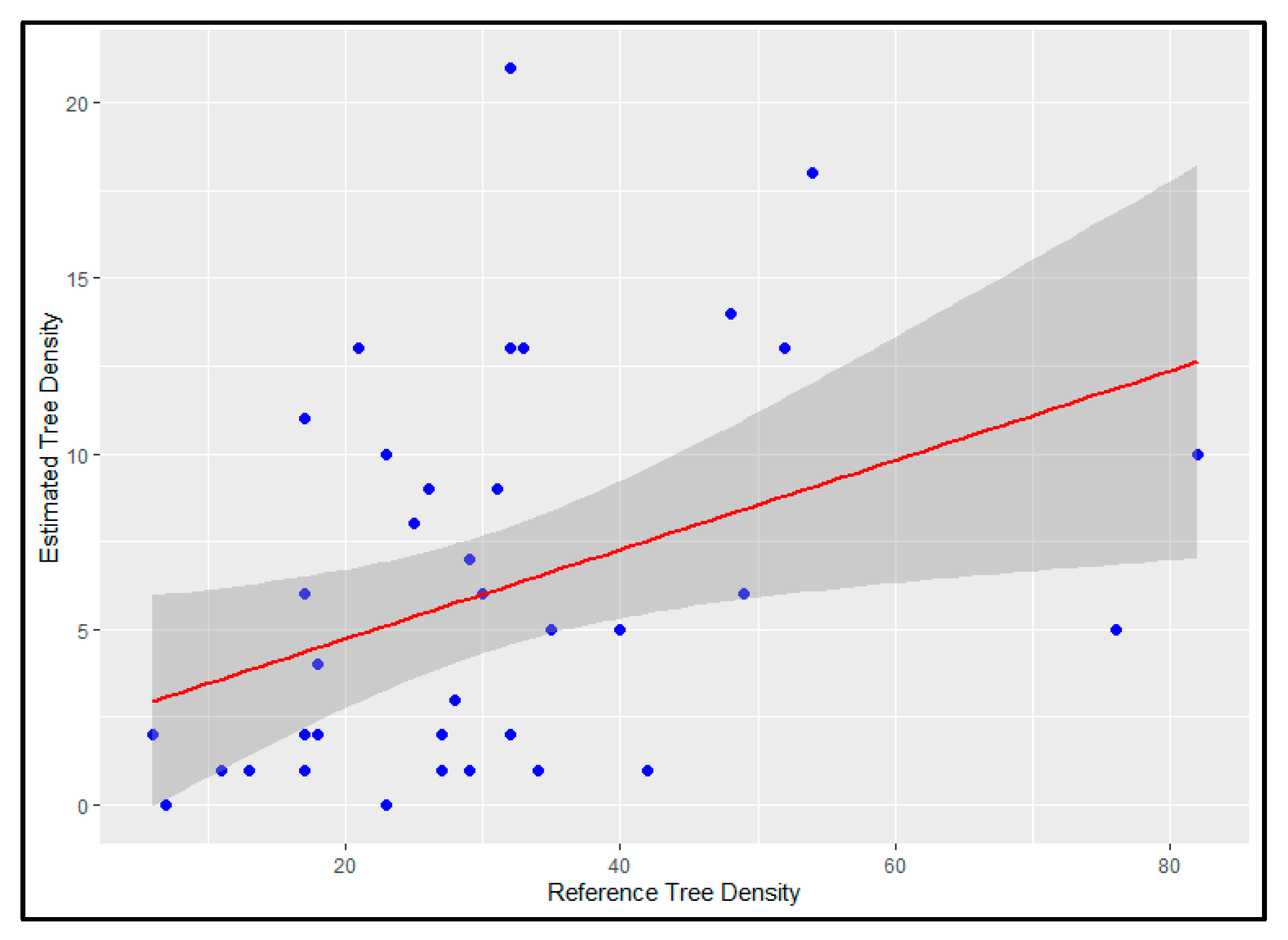
| Tree density (DBH class 1) | 0.15 | 0.12 | 5.09 |
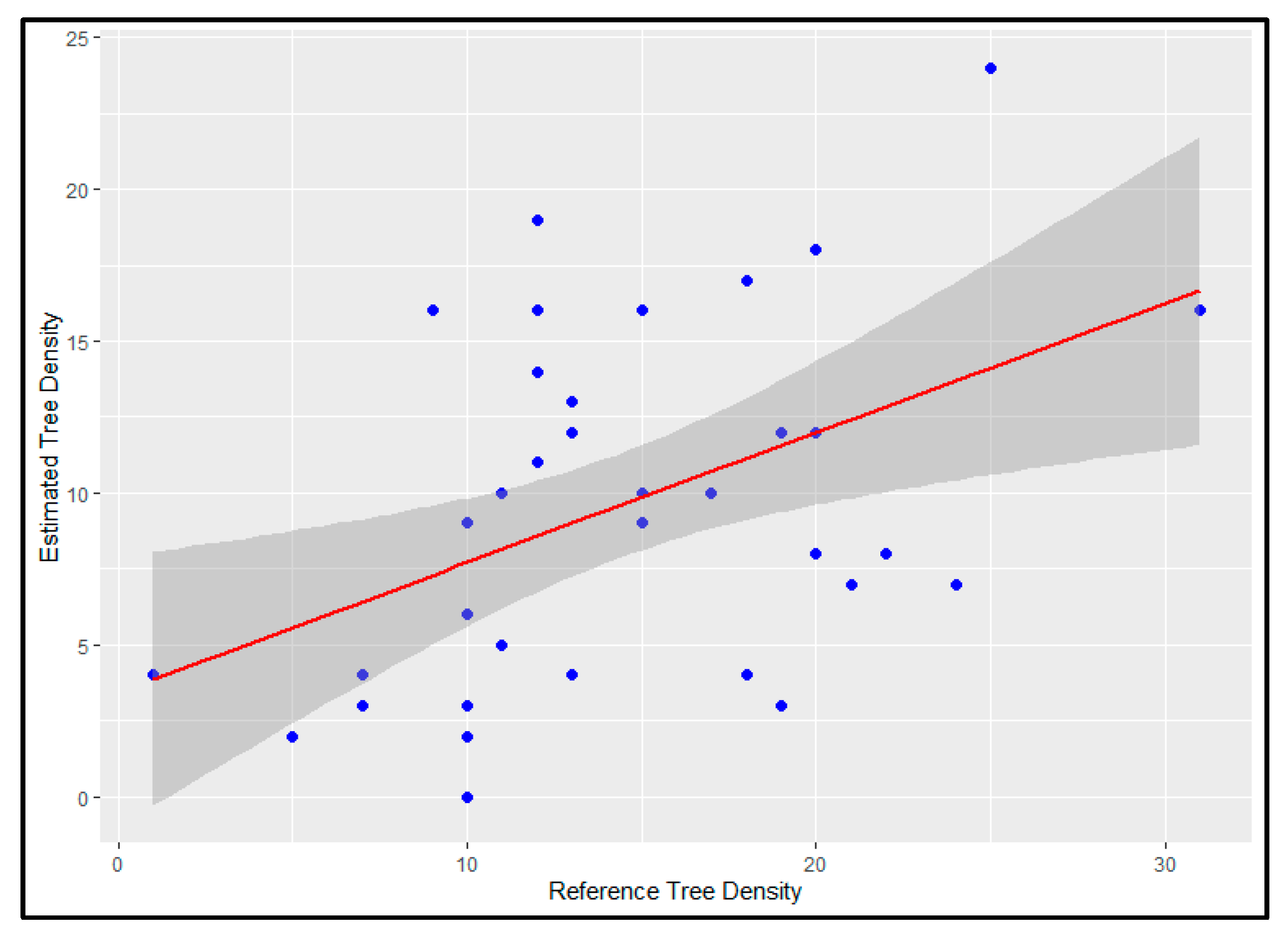
| Tree density (DBH class 2) | 0.20 | 0.18 | 5.21 |
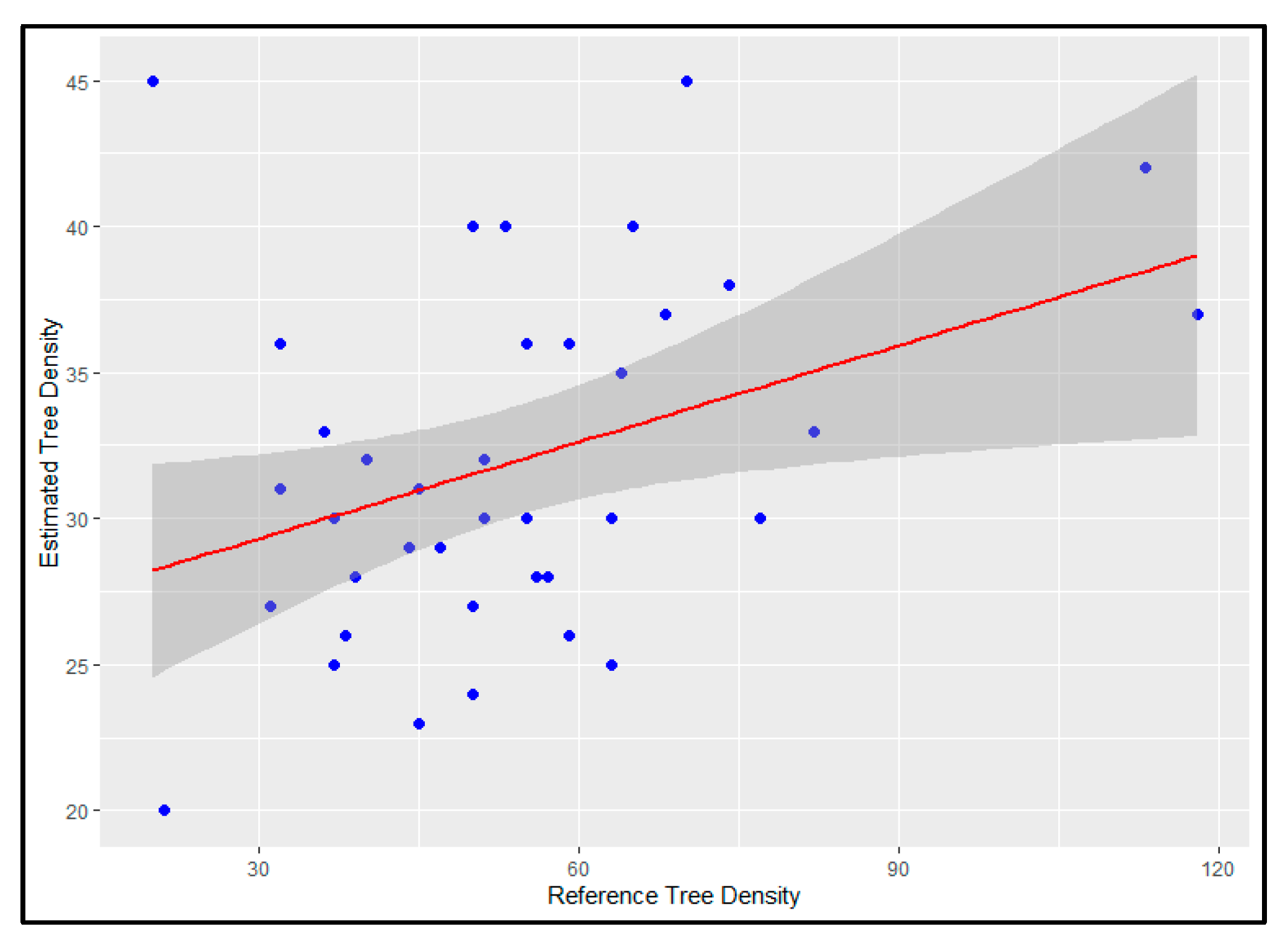
| Tree density (DBH class 3) | 0.61 | 0.60 | 5.15 |
| Stem biomass | 0.67 | 0.66 | 1813 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Georgopoulos, N.; Stefanidou, A.; Gitas, I.Z. Supporting Operational Tree Marking Activities through Airborne LiDAR Data in the Frame of Sustainable Forest Management. Forests 2023, 14, 2311. https://doi.org/10.3390/f14122311
Georgopoulos N, Stefanidou A, Gitas IZ. Supporting Operational Tree Marking Activities through Airborne LiDAR Data in the Frame of Sustainable Forest Management. Forests. 2023; 14(12):2311. https://doi.org/10.3390/f14122311
Chicago/Turabian StyleGeorgopoulos, Nikos, Alexandra Stefanidou, and Ioannis Z. Gitas. 2023. "Supporting Operational Tree Marking Activities through Airborne LiDAR Data in the Frame of Sustainable Forest Management" Forests 14, no. 12: 2311. https://doi.org/10.3390/f14122311
APA StyleGeorgopoulos, N., Stefanidou, A., & Gitas, I. Z. (2023). Supporting Operational Tree Marking Activities through Airborne LiDAR Data in the Frame of Sustainable Forest Management. Forests, 14(12), 2311. https://doi.org/10.3390/f14122311