
Monitoring the Severity of Rubber Tree Infected with Powdery Mildew Based on UAV Multispectral Remote Sensing
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
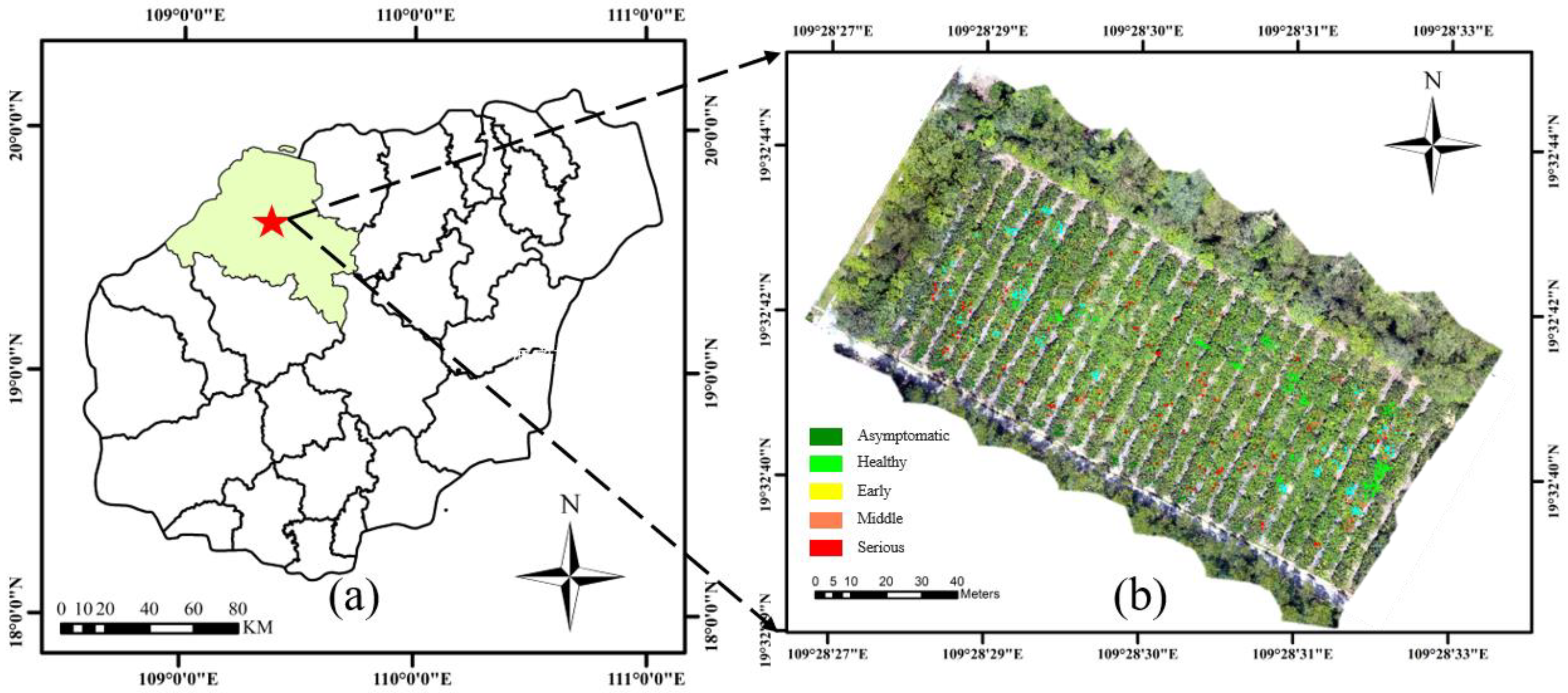
2.1. Study Area
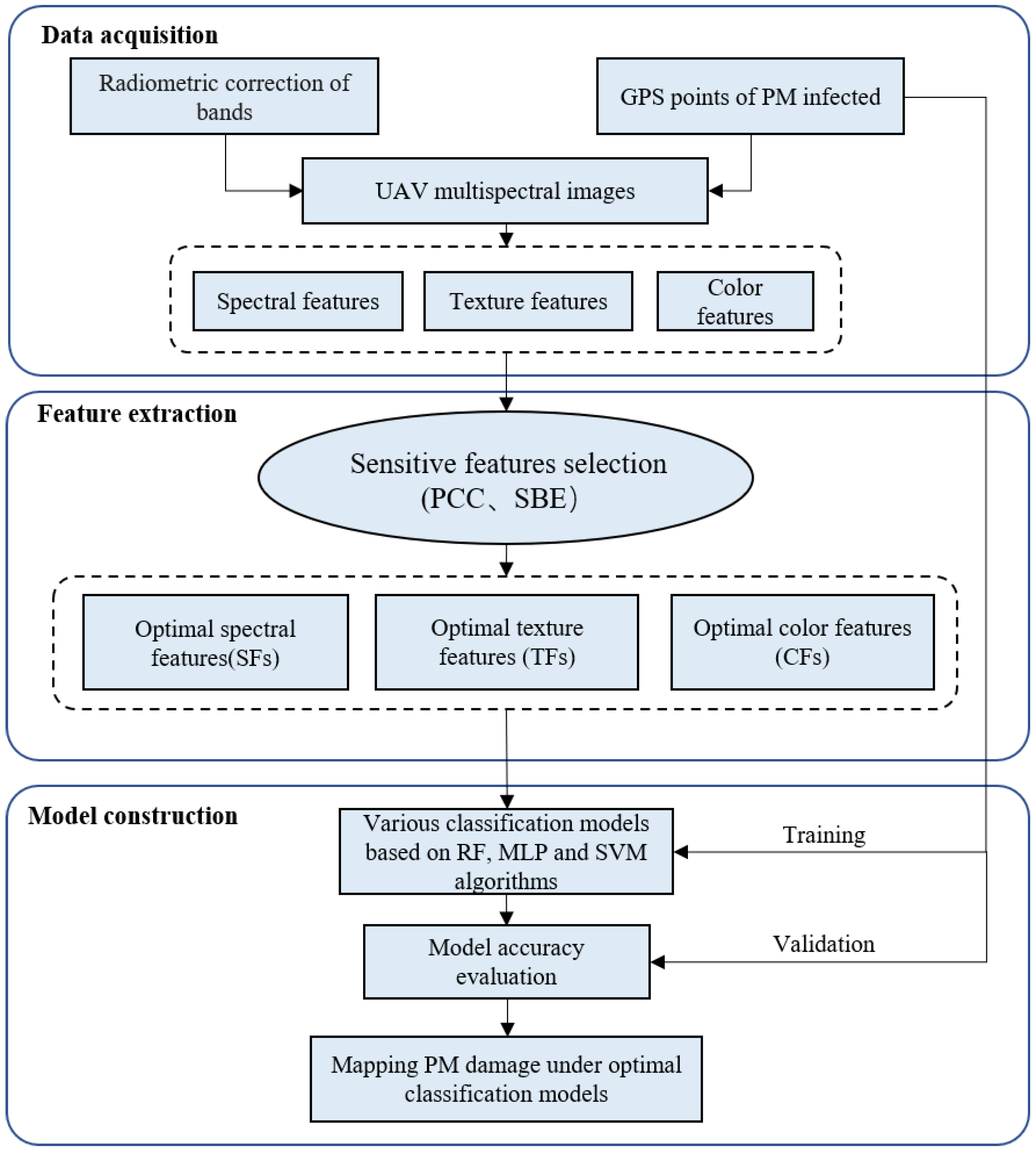
2.2. Study Framework
2.3. Data Acquisition
2.3.1. Field Data Acquisition
2.3.2. UAV Multispectral Image Acquisition and Pre-Processing
2.4. Feature Extraction and Analysis
2.5. Modeling Methods
2.6. Accuracy Assessment
3. Results
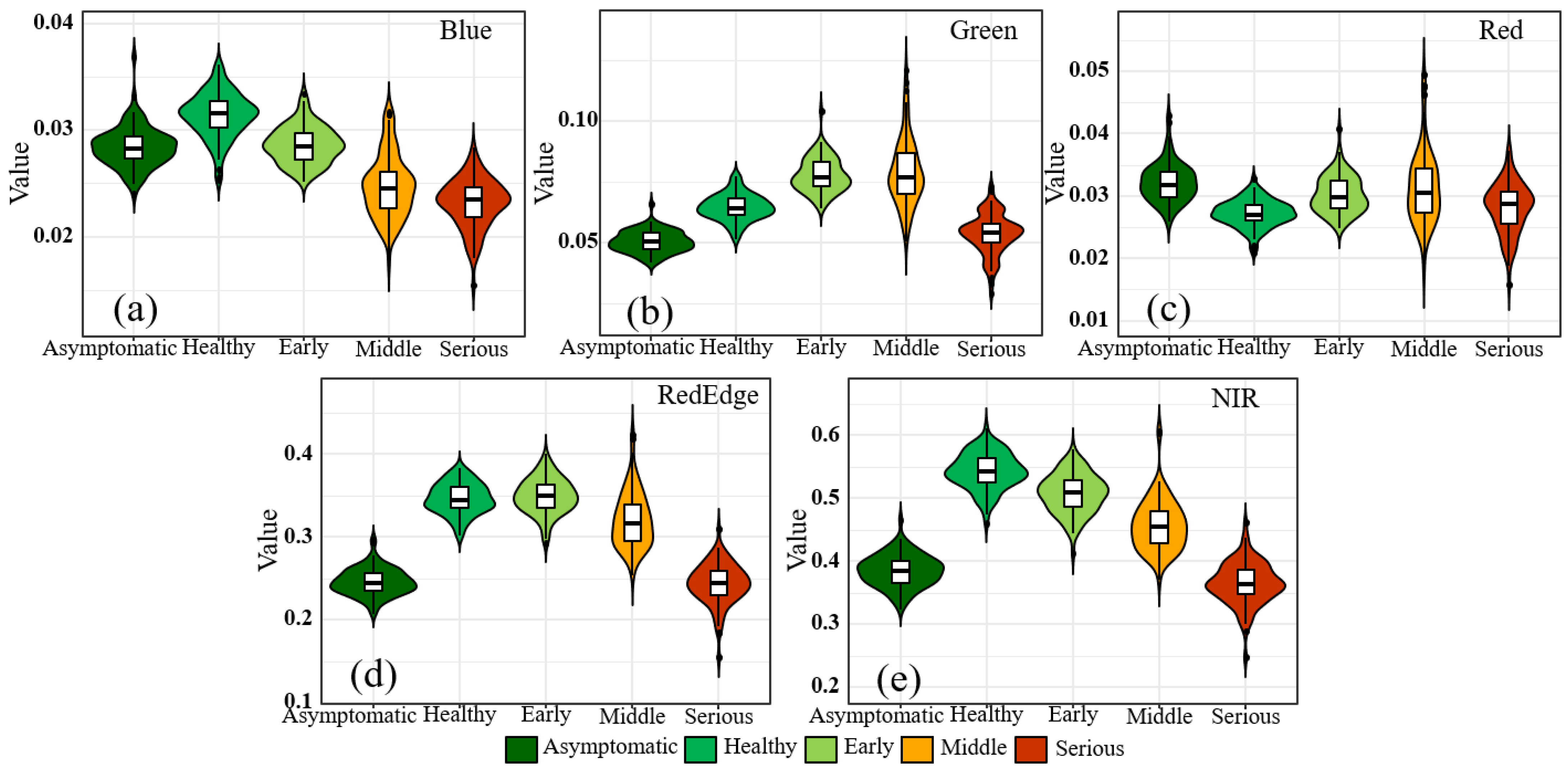
3.1. Spectral Analysis of Rubber Tree Infected with Powdery Mildew
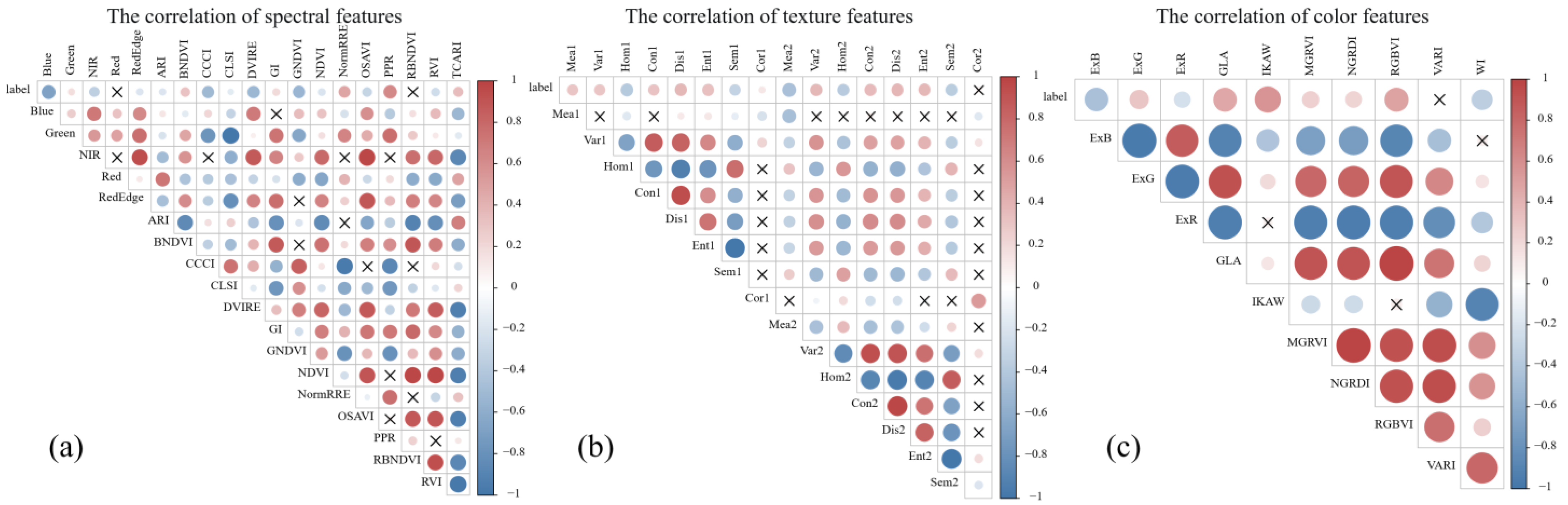
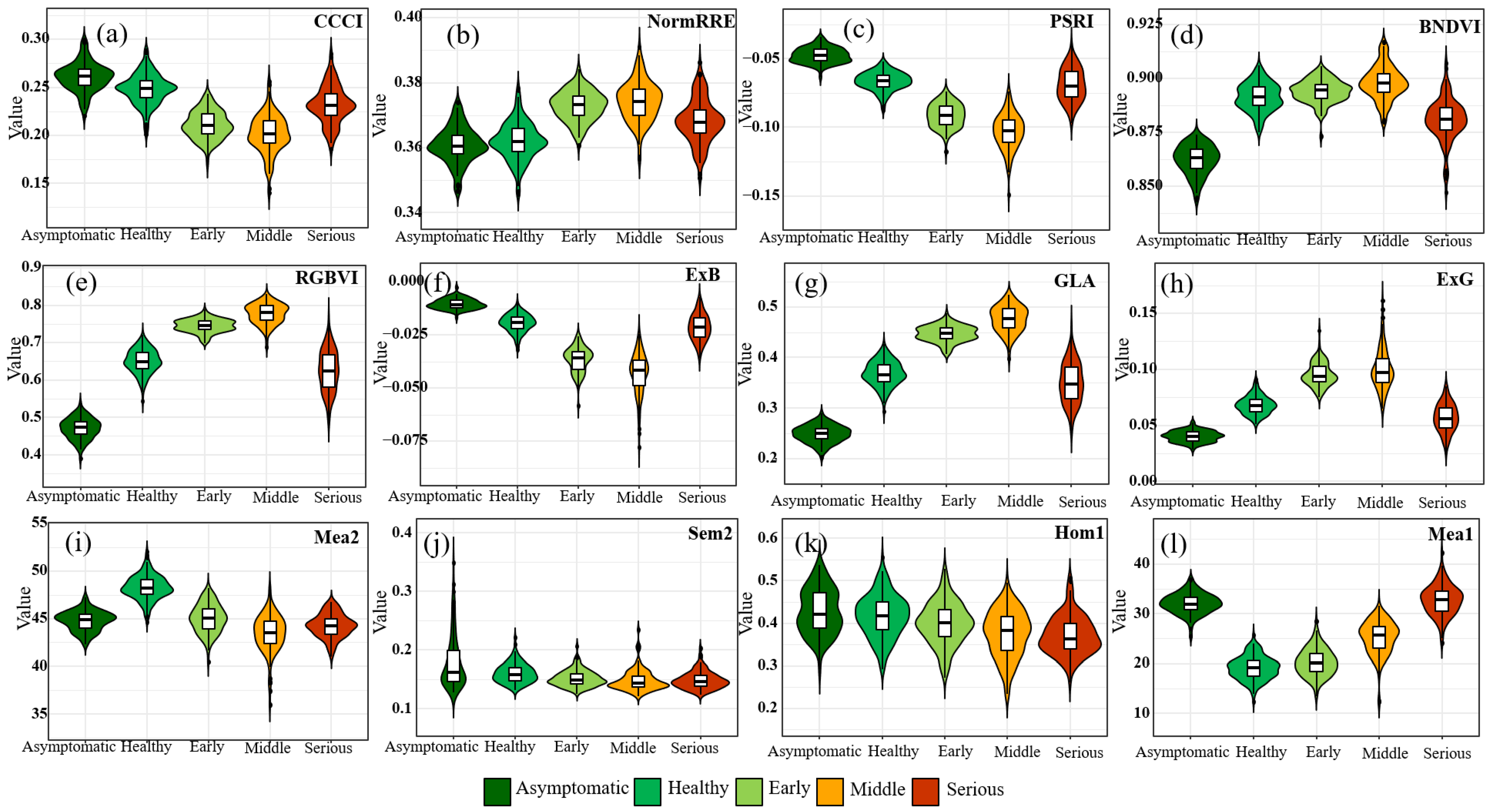
3.2. Feature Sensitivity Analysis
3.3. Classification Model Performance of Rubber Tree Powdery Mildew
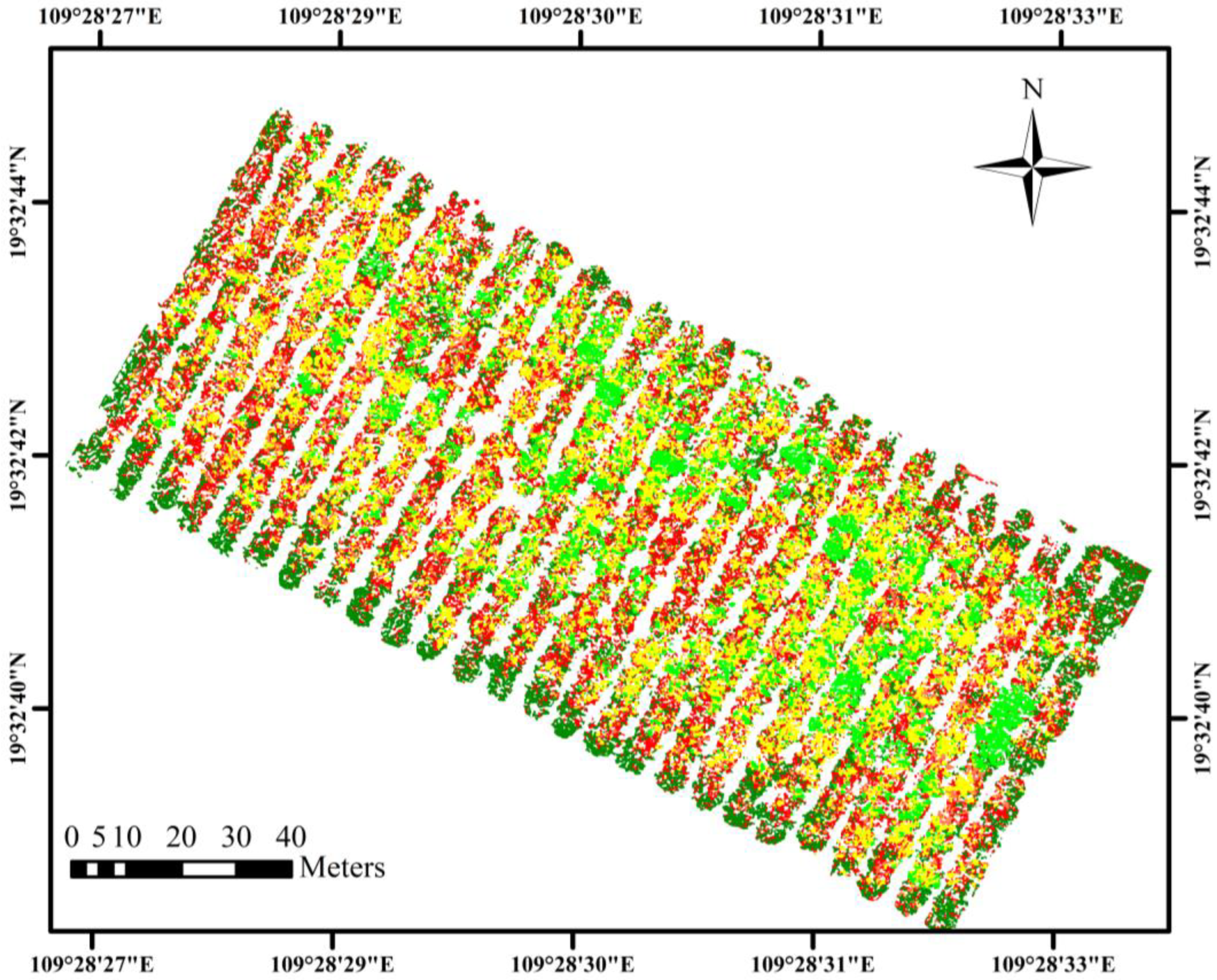
3.4. Identifying the Severity of the Rubber Tree Study Area
4. Discussion
5. Conclusions
- (1)
- The sensitive spectral bands of PM were the blue (434–466 nm), green (544–576 nm), red-edge (714–746 nm), and near-infrared bands (814–876 nm). Meanwhile, vegetation index features (CCCI, NormRRE, PSRI, BNDVI), texture features (Mean, Homogeneity), and color features (RGBVI, ExB, GLA, ExG) were the most sensitive combinations of features for monitoring rubber trees.
- (2)
- Compared with single feature types (SF, TF, CF), fused features (SF + TF + CF) had higher accuracy (OA = 95.88%, Kappa = 0.94) with improvement in accuracy of 7.74%, 23.2% and 14.95%, respectively. Meanwhile, a single feaure type has a limited effect on early-stage infection detection, and the fusion of all features for early monitoring has better classification accuracy, with a recognition rate of 93.2%, which provides options for early monitoring of PM occurrence in rubber trees.
- (3)
- The SVM and RF models provide higher monitoring accuracy than the BPNN model. For TFs and CFs, the RF model has better prediction results. For fusion features (SF + TF + CF), the SVM model has a better prediction.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liyanage, K.K.; Khan, S.; Mortimer, P.E.; Hyde, K.D.; Xu, J.; Brooks, S.; Ming, Z. Powdery Mildew Disease of Rubber Tree. For. Pathol. 2016, 46, 90–103. [Google Scholar] [CrossRef]
- Limkaisang, S.; Kom-un, S.; Furtado, E.L.; Liew, K.W.; Salleh, B.; Sato, Y.; Takamatsu, S. Molecular Phylogenetic and Morphological Analyses of Oidium Heveae, a Powdery Mildew of Rubber Tree. Mycoscience 2005, 46, 220–226. [Google Scholar] [CrossRef]
- Wang, L.-F.; Wang, M.; Zhang, Y. Effects of Powdery Mildew Infection on Chloroplast and Mitochondrial Functions in Rubber Tree. Trop. Plant Pathol. 2014, 39, 242–250. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Pan, Y.; Di, R.; He, Q.; Rajaofera, M.J.N.; Liu, W.; Zheng, F.; Miao, W. Molecular Identification of the Powdery Mildew Fungus Infecting Rubber Trees in China. For. Pathol. 2019, 49, e12519. [Google Scholar] [CrossRef]
- Cao, X.; Xu, X.; Che, H.; West, J.S.; Luo, D. Effects of Temperature and Leaf Age on Conidial Germination and Disease Development of Powdery Mildew on Rubber Tree. Plant Pathol. 2021, 70, 484–491. [Google Scholar] [CrossRef]
- Gogoi, N.K.; Deka, B.; Bora, L.C. Remote Sensing and Its Use in Detection and Monitoring Plant Diseases: A Review. Agric. Rev. 2018, 39, 307–313. [Google Scholar] [CrossRef]
- Abd El-Ghany, N.M.; Abd El-Aziz, S.E.; Marei, S.S. A Review: Application of Remote Sensing as a Promising Strategy for Insect Pests and Diseases Management. Environ. Sci. Pollut. Res. 2020, 27, 33503–33515. [Google Scholar] [CrossRef]
- Zhang, J.; Yuan, L.; Wang, J.; Luo, J.; Du, S.; Huang, W. Research Progress of Crop Diseases and Pests Monitoring Based on Remote Sensing. Trans. Chin. Soc. Agric. Eng. 2012, 28, 1–11. [Google Scholar]
- Chemura, A.; Mutanga, O.; Dube, T. Separability of Coffee Leaf Rust Infection Levels with Machine Learning Methods at Sentinel-2 MSI Spectral Resolutions. Precis. Agric. 2017, 18, 859–881. [Google Scholar] [CrossRef]
- Zhang, J.; Pu, R.; Yuan, L.; Wang, J.; Huang, W.; Yang, G. Monitoring Powdery Mildew of Winter Wheat by Using Moderate Resolution Multi-Temporal Satellite Imagery. PLoS ONE 2014, 9, e93107. [Google Scholar] [CrossRef] [Green Version]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.-J.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring: A Systematic Review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Heidarian Dehkordi, R.; El Jarroudi, M.; Kouadio, L.; Meersmans, J.; Beyer, M. Monitoring Wheat Leaf Rust and Stripe Rust in Winter Wheat Using High-Resolution UAV-Based Red-Green-Blue Imagery. Remote Sens. 2020, 12, 3696. [Google Scholar] [CrossRef]
- Lan, Y.; Huang, Z.; Deng, X.; Zhu, Z.; Huang, H.; Zheng, Z.; Lian, B.; Zeng, G.; Tong, Z. Comparison of Machine Learning Methods for Citrus Greening Detection on UAV Multispectral Images. Comput. Electron. Agric. 2020, 171, 105234. [Google Scholar] [CrossRef]
- Zhang, S.; Huang, H.; Huang, Y.; Cheng, D.; Huang, J. A GA and SVM Classification Model for Pine Wilt Disease Detection Using UAV-Based Hyperspectral Imagery. Appl. Sci. 2022, 12, 6676. [Google Scholar] [CrossRef]
- Li, S.; Yuan, F.; Ata-UI-Karim, S.T.; Zheng, H.; Cheng, T.; Liu, X.; Tian, Y.; Zhu, Y.; Cao, W.; Cao, Q. Combining Color Indices and Textures of UAV-Based Digital Imagery for Rice LAI Estimation. Remote Sens. 2019, 11, 1763. [Google Scholar] [CrossRef] [Green Version]
- Zheng, H.; Cheng, T.; Zhou, M.; Li, D.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Improved Estimation of Rice Aboveground Biomass Combining Textural and Spectral Analysis of UAV Imagery. Precis. Agric. 2019, 20, 611–629. [Google Scholar] [CrossRef]
- Ma, L.; Huang, X.; Hai, Q.; Gang, B.; Tong, S.; Bao, Y.; Dashzebeg, G.; Nanzad, T.; Dorjsuren, A.; Enkhnasan, D. Model-Based Identification of Larix Sibirica Ledeb. Damage Caused by Erannis Jacobsoni Djak. Based on UAV Multispectral Features and Machine Learning. Forests 2022, 13, 2104. [Google Scholar] [CrossRef]
- Gao, C.; Ji, X.; He, Q.; Gong, Z.; Sun, H.; Wen, T.; Guo, W. Monitoring of Wheat Fusarium Head Blight on Spectral and Textural Analysis of UAV Multispectral Imagery. Agriculture 2023, 13, 293. [Google Scholar] [CrossRef]
- Liu, L.; Dong, Y.; Huang, W.; Du, X.; Ma, H. Monitoring Wheat Fusarium Head Blight Using Unmanned Aerial Vehicle Hyperspectral Imagery. Remote Sens. 2020, 12, 3811. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, L.; Huang, W.; Dong, Y.; Weng, S.; Zhao, J.; Ma, H.; Liu, L. Detection of Wheat Fusarium Head Blight Using UAV-Based Spectral and Image Feature Fusion. Front. Plant Sci. 2022, 13, 1004427. [Google Scholar] [CrossRef]
- Dang, L.M.; Hassan, S.I.; Suhyeon, I.; kumar Sangaiah, A.; Mehmood, I.; Rho, S.; Seo, S.; Moon, H. UAV Based Wilt Detection System via Convolutional Neural Networks. Sustain. Comput. Inform. Syst. 2020, 28, 100250. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Zhang, Q.; Xiang, S.; Li, Y.; Huang, X.; Zhang, Y.; Zhou, X.; Li, Z.; Yao, X.; Li, Q. Monitoring the Severity of Pantana Phyllostachysae Chao Infestation in Moso Bamboo Forests Based on UAV Multi-Spectral Remote Sensing Feature Selection. Forests 2022, 13, 418. [Google Scholar] [CrossRef]
- Liang, Y.; Kou, W.; Lai, H.; Wang, J.; Wang, Q.; Xu, W.; Wang, H.; Lu, N. Improved Estimation of Aboveground Biomass in Rubber Plantations by Fusing Spectral and Textural Information from UAV-Based RGB Imagery. Ecol. Indic. 2022, 142, 109286. [Google Scholar] [CrossRef]
- Chandel, A.K.; Khot, L.R.; Sallato, B. Apple Powdery Mildew Infestation Detection and Mapping Using High-Resolution Visible and Multispectral Aerial Imaging Technique. Sci. Hortic. 2021, 287, 110228. [Google Scholar] [CrossRef]
- Wang, F.-M.; Huang, J.-F.; Tang, Y.-L.; Wang, X.-Z. New Vegetation Index and Its Application in Estimating Leaf Area Index of Rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]
- Zhou, J.; Yungbluth, D.; Vong, C.N.; Scaboo, A.; Zhou, J. Estimation of the Maturity Date of Soybean Breeding Lines Using UAV-Based Multispectral Imagery. Remote Sens. 2019, 11, 2075. [Google Scholar] [CrossRef] [Green Version]
- Chivasa, W.; Mutanga, O.; Burgueño, J. UAV-Based High-Throughput Phenotyping to Increase Prediction and Selection Accuracy in Maize Varieties under Artificial MSV Inoculation. Comput. Electron. Agric. 2021, 184, 106128. [Google Scholar] [CrossRef]
- Patrick, A.; Pelham, S.; Culbreath, A.; Holbrook, C.C.; de Godoy, I.J.; Li, C. High Throughput Phenotyping of Tomato Spot Wilt Disease in Peanuts Using Unmanned Aerial Systems and Multispectral Imaging. IEEE Instrum. Meas. Mag. 2017, 20, 4–12. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Miller, J.R.; Morales, A.; Berjón, A.; Agüera, J. Hyperspectral Indices and Model Simulation for Chlorophyll Estimation in Open-Canopy Tree Crops. Remote Sens. Environ. 2004, 90, 463–476. [Google Scholar] [CrossRef]
- Merzlyak, M.N.; Gitelson, A.A.; Chivkunova, O.B.; Rakitin, V.Y.U. Non-destructive Optical Detection of Pigment Changes during Leaf Senescence and Fruit Ripening. Physiol. Plant 1999, 106, 135–141. [Google Scholar] [CrossRef] [Green Version]
- Xue, L.; Cao, W.; Luo, W.; Dai, T.; Zhu, Y. Monitoring Leaf Nitrogen Status in Rice with Canopy Spectral Reflectance. Agron. J. 2004, 96, 135–142. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated Narrow-Band Vegetation Indices for Prediction of Crop Chlorophyll Content for Application to Precision Agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of Color Vegetation Indices for Automated Crop Imaging Applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocart. Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Kawashima, S.; Nakatani, M. An Algorithm for Estimating Chlorophyll Content in Leaves Using a Video Camera. Ann. Bot. 1998, 81, 49–54. [Google Scholar] [CrossRef] [Green Version]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-Based Plant Height from Crop Surface Models, Visible, and near Infrared Vegetation Indices for Biomass Monitoring in Barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel Algorithms for Remote Estimation of Vegetation Fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Woebbecke, D.M.; Meyer, G.E.; von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Du, M.; Noguchi, N. Monitoring of Wheat Growth Status and Mapping of Wheat Yield’s within-Field Spatial Variations Using Color Images Acquired from UAV-Camera System. Remote Sens. 2017, 9, 289. [Google Scholar] [CrossRef] [Green Version]
- Xiao, D.; Pan, Y.; Feng, J.; Yin, J.; Liu, Y.; He, L. Remote Sensing Detection Algorithm for Apple Fire Blight Based on UAV Multispectral Image. Comput. Electron. Agric. 2022, 199, 107137. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, Q.; Li, H.; Li, J.; Liu, T.; Chen, Y.; Ai, M.; Dong, J. A Back Propagation Neural Network-Based Radiometric Correction Method (BPNNRCM) for UAV Multispectral Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 16, 112–125. [Google Scholar] [CrossRef]
- Lee, H.; Wang, J.; Leblon, B. Using Linear Regression, Random Forests, and Support Vector Machine with Unmanned Aerial Vehicle Multispectral Images to Predict Canopy Nitrogen Weight in Corn. Remote Sens. 2020, 12, 2071. [Google Scholar] [CrossRef]
- Bai, R.; Wang, J.; Li, N. Climate Change Increases the Suitable Area and Suitability Degree of Rubber Tree Powdery Mildew in China. Ind. Crops Prod. 2022, 189, 115888. [Google Scholar] [CrossRef]
- Nebiker, S.; Lack, N.; Abächerli, M.; Läderach, S. Light-Weight Multispectral UAV Sensors and Their Capabilities for Predicting Grain Yield and Detecting Plant Diseases. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Prague, Czech Republic, 12–19 July 2016; Volume 41. [Google Scholar]
- Abdulridha, J.; Ampatzidis, Y.; Roberts, P.; Kakarla, S.C. Detecting Powdery Mildew Disease in Squash at Different Stages Using UAV-Based Hyperspectral Imaging and Artificial Intelligence. Biosyst. Eng. 2020, 197, 135–148. [Google Scholar] [CrossRef]
- Knauer, U.; Matros, A.; Petrovic, T.; Zanker, T.; Scott, E.S.; Seiffert, U. Improved Classification Accuracy of Powdery Mildew Infection Levels of Wine Grapes by Spatial-Spectral Analysis of Hyperspectral Images. Plant Methods 2017, 13, 47. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Li, X.; Xiao, X.; Zhao, B.; Dong, J.; Kou, W.; Qin, Y.; Yang, C.; Wu, Z.; Sun, R. Mapping Tropical Forests and Deciduous Rubber Plantations in Hainan Island, China by Integrating PALSAR 25-m and Multi-Temporal Landsat Images. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 117–130. [Google Scholar] [CrossRef]
- Mazlan, S.; JAAFAR, N.M.; Wahab, A.; Rajandas, H.; Zulperi, D. Major Diseases of Rubber (Hevea Brasiliensis) in Malaysia. Pertanika J. Sch. Res. Rev. 2019, 5, 10–21. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Asymptomatic | Healthy | Early | Middle | Serious |
|---|---|---|---|---|---|
| Leaf spot area | 0 | 0 | 0%~25% | 25%~50% | 50%~100% |
| Canopy appearance characteristics | Canopy leaves abundant; old leaves; not infected with powdery mildew; dark green. | Canopy leaves abundant; fresh young leaves; not infected with powdery mildew; light green. | Canopy leaves abundant; leaves with a few powdery mild spots, lightly crinkled; leaves starting to turn yellow. | Canopy leaves begin to drop; most leaves have more spots and moderate crinkling; leaves are light yellow. | Canopy leaves are sparse; leaf spots are accumulated and severely crinkled; leaves are yellow. |
| Vegetation Index | Abbreviation | Formula | Reference |
|---|---|---|---|
| Blue-Normalized Difference Vegetation Index | BNDVI | (nir − b)/(nir + b) | [25] |
| Canopy Chlorophyll Contents Index | CCCI | ((nir − re)/(nir + re))/((nir − r)/(nir + r)) | [26] |
| Clgreen | nir/g-1 | [27] | |
| Cercospora Leaf Spot Index | CLSI | (re − g)/(re + g) − re | [26] |
| Difference Vegetation Index-RedEdge | DVIRE | nir − re | [28] |
| Green Normalized Difference Vegetation Index | GNDVI | (nir − g)/(nir + g) | [28] |
| Modified Simple Ratio | MSR | (nir/r − 1)/( | [24] |
| Normalized Difference Vegetation Index | NDVI | (nir − r)/(nir + r) | [28] |
| Normalized Red -RE | NormRRE | re/(nir + re + g) | [28] |
| Optimal Soil-Adjusted Vegetation Index | OSAVI | (nir − r)/(nir + r + 0.16) | [29] |
| Plant Senescence Reflectance Index | PSRI | (r − g)/nir | [30] |
| Red-blue normalized difference vegetation index | RBNDVI | (nir − (r + b)]/(nir + (r + b)) | [25] |
| Ratio Vegetation Index | RVI | nir/r | [31] |
| Transformed Chlorophyll Absorption Reflectance Index | TCARI | 3 ((nir − r) − 0.2 (nir − g) (nir/r)) | [32] |
| Color Feature | Abbreviation | Formula | Reference |
|---|---|---|---|
| Excess Blue Vegetation Index | ExB | 1.4b − g | [15] |
| Excess Green Vegetation Index | ExG | 2g − r − b | [33] |
| Excess Red Vegetation Index | ExR | 1.4r − g | [33] |
| Green Leaf Algorithm | GLA | (2g − r − b)/(2g + r + b) | [34] |
| Kawashima Index | IKAW | (r − b)/(r + b) | [35] |
| Modified Green Red Vegetation Index | MGRVI | (g2 − r2)/(g2 + r2) | [36] |
| Normalized Green-Red Difference Index | NGRDI | (g − r)/(g + r) | [36] |
| Red Green Blue Vegetation Index | RGBVI | (g2 − b r)/(g2 + b r) | [37] |
| Visible Atmospherically Resistant Index | VARI | (g − r)/(g + r − b) | [38] |
| Woebbecke Index | WI | (g − b)/(r − g) | [39] |
| Spectral Parameter | |||
|---|---|---|---|
| Feature | Coefficient of Correlation (R) | Feature | Coefficient of Correlation (R) |
| Blue | −0.680 ** | GNDVI | −0.536 ** |
| Green | 0.173 ** | MSR | 0.627 ** |
| NIR | −0.350 ** | NDVI | −0.196 ** |
| Red | −0.051 | NormRRE | 0.474 ** |
| RedEdge | −0.188 ** | PSRI | −0.541 ** |
| BNDVI | 0.314 ** | OSAVI | −0.310 ** |
| CCCI | −0.509 ** | RBNDVI | −0.024 |
| Clrededge | −0.196 ** | RVI | −0.259 ** |
| CLSI | −0.148 ** | TCARI | 0.355 ** |
| DVIRE | −0.523 ** | ||
| Texture parameter | |||
| Feature | Coefficient of Correlation (R) | Feature | Coefficient of Correlation (R) |
| Mea1 | 0.300 ** | Mea2 | −0.454 ** |
| Var1 | 0.308 ** | Var2 | 0.375 ** |
| Hom1 | −0.385 ** | Hom2 | −0.373 ** |
| Con1 | 0.314 ** | Con2 | 0.363 ** |
| Dis1 | 0.376 ** | Dis2 | 0.381 ** |
| Ent1 | 0.332 ** | Ent2 | 0.379 ** |
| Sem1 | −0.311 ** | Sem2 | −0.368 ** |
| Cor1 | 0.121 ** | Cor2 | 0.081 * |
| Color parameter | |||
| Feature | Coefficient of Correlation (R) | Feature | Coefficient of Correlation (R) |
| ExB | −0.455 ** | MGRVI | 0.244 ** |
| ExG | 0.304 ** | NGRDI | 0.225 ** |
| ExR | −0.223 ** | RGBVI | 0.484 ** |
| GLA | 0.465 ** | VARI | 0.019 |
| IKAW | 0.563 ** | WI | −0.357 ** |
| Type | Variable Number | Selected Features |
|---|---|---|
| Spectral parameter | 5 | Blue, CCCI, NormRRE, PSRI, BNDVI |
| Texture parameter | 4 | Mea2, Sem2, Hom1, Mea1 |
| Color parameter | 4 | RGBVI, ExB, GLA, ExG |
| Type | SVM | RF | BPNN |
|---|---|---|---|
| Spectral | C = 100, gamma = 1, kernel = ‘rbf’ | max_depth = 8, min_samples_leaf = 4, min_samples_split = 4, n_estimators = 600 | activation = ‘tanh’, alpha = 0.05, hidden_layer_sizes = (50, 100, 50), learning_rate = ‘constant’, solver = ‘adam’ |
| Texture | C = 100, gamma = 1, kernel = ‘linear’ | max_depth = 8, min_samples_leaf = 4, min_samples_split = 4, n_estimators = 600 | activation = ‘tanh’, alpha = 0.05, hidden_layer_sizes = (50, 100, 50), learning_rate = ‘adaptive’, solver= ‘adam’ |
| Color | C = 100, gamma = 1, kernel = ‘rbf’ | max_depth = 12, min_samples_leaf = 4, min_samples_split = 4, n_estimators = 600 | activation = ‘tanh’, alpha = 0.05, hidden_layer_sizes = (50, 50, 50), learning_rate = ‘adaptive’, solver = ‘adam’ |
| Spectral + texture + color | C = 1, degree = 2, gamma = 1, kernel = ‘poly’ | max_depth = 10, min_samples_leaf = 4, min_samples_split = 4, n_estimators = 800 | activation = ‘tanh’, alpha = 0.0001, hidden_layer_sizes = (50, 100, 50), learning_rate = ‘constant’, solver = ‘adam’ |
| Feature | Model | OA (%) | Recall (%) | f1-Score (%) | Kappa |
|---|---|---|---|---|---|
| Spectral | RF | 91.75 | 91.75 | 91.67 | 0.89 |
| BPNN | 71.13 | 71.13 | 66.65 | 0.63 | |
| SVM | 88.14 | 88.14 | 87.98 | 0.85 | |
| Texture | RF | 75.26 | 75.26 | 74.92 | 0.68 |
| BPNN | 58.25 | 58.25 | 55.30 | 0.47 | |
| SVM | 72.68 | 72.68 | 72.01 | 0.65 | |
| Color | RF | 87.11 | 87.11 | 86.96 | 0.83 |
| BPNN | 72.68 | 72.68 | 70.96 | 0.65 | |
| SVM | 80.93 | 80.93 | 80.27 | 0.75 | |
| Spectral + texture + color | RF | 91.75 | 91.75 | 91.71 | 0.89 |
| BPNN | 84.02 | 84.02 | 83.96 | 0.79 | |
| SVM | 95.88 | 95.88 | 95.87 | 0.94 |
| Tree Health Condition | Area (Pixels) | Percentage (%) |
|---|---|---|
| Asymptomatic Stage | 1,494,076 | 20.9 |
| Healthy Stage | 1,184,543 | 16.6 |
| Early Stage | 2,292,020 | 31.9 |
| Middle Stage | 332,030 | 4.6 |
| Serious Stage | 1,866,922 | 26 |
| Total | 7,169,591 | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, T.; Zhang, H.; Li, Y.; Yin, C.; Liang, Q.; Fang, J.; Fu, W.; Wang, J.; Zhang, X. Monitoring the Severity of Rubber Tree Infected with Powdery Mildew Based on UAV Multispectral Remote Sensing. Forests 2023, 14, 717. https://doi.org/10.3390/f14040717
Zeng T, Zhang H, Li Y, Yin C, Liang Q, Fang J, Fu W, Wang J, Zhang X. Monitoring the Severity of Rubber Tree Infected with Powdery Mildew Based on UAV Multispectral Remote Sensing. Forests. 2023; 14(4):717. https://doi.org/10.3390/f14040717
Chicago/Turabian StyleZeng, Tiwei, Huiming Zhang, Yuan Li, Chenghai Yin, Qifu Liang, Jihua Fang, Wei Fu, Juan Wang, and Xirui Zhang. 2023. "Monitoring the Severity of Rubber Tree Infected with Powdery Mildew Based on UAV Multispectral Remote Sensing" Forests 14, no. 4: 717. https://doi.org/10.3390/f14040717