
Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region

 ,
,  , ,
, ,  , ,
, ,  , , , , , , and
, , , , , , and 
Abstract
1. Introduction
2. Materials and Methods
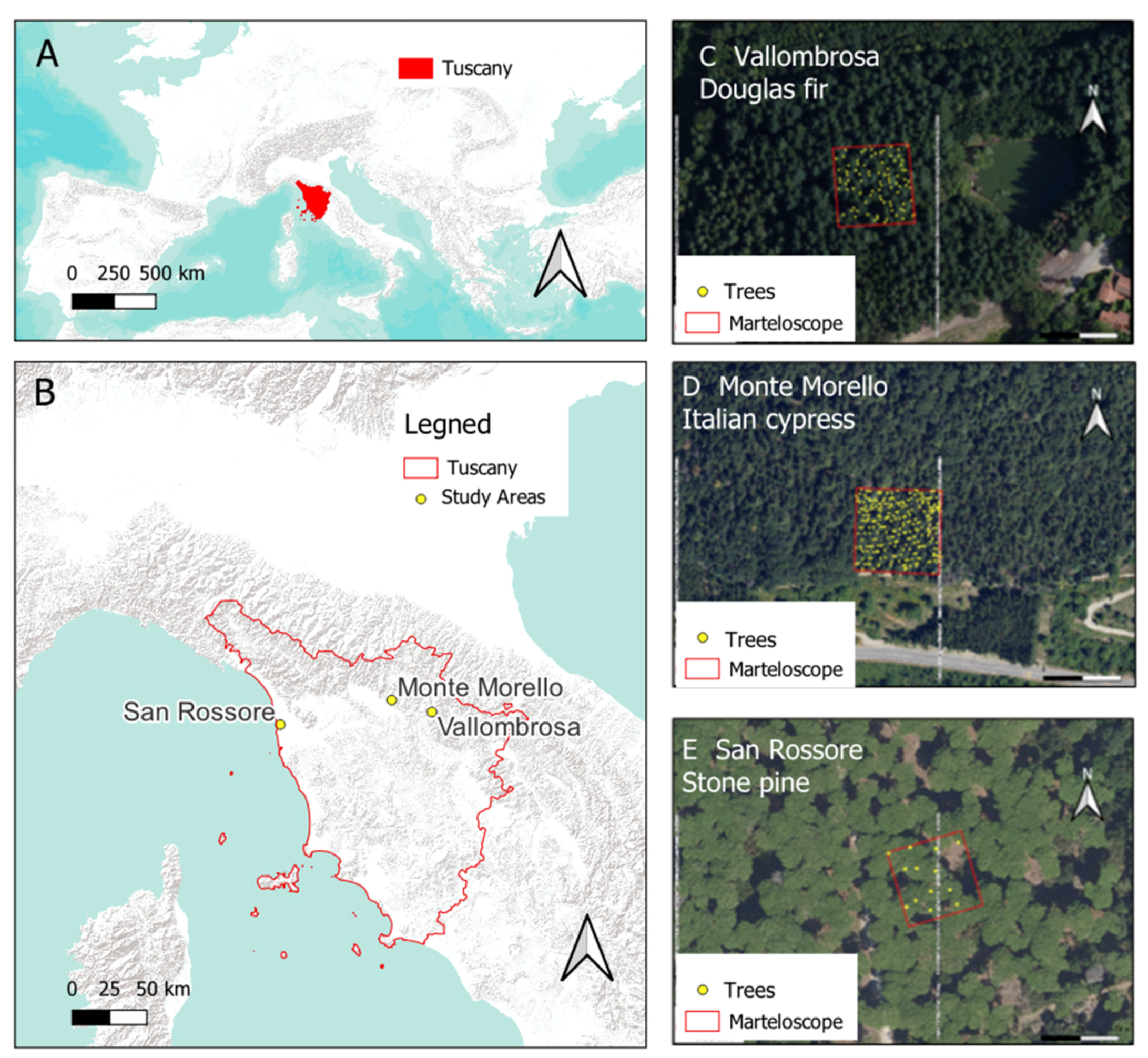
2.1. Study Areas and Silvicultural Operations
2.2. Traditional Marteloscope
2.3. Mobile Laser Scanning Marteloscope
2.3.1. MLS Platform
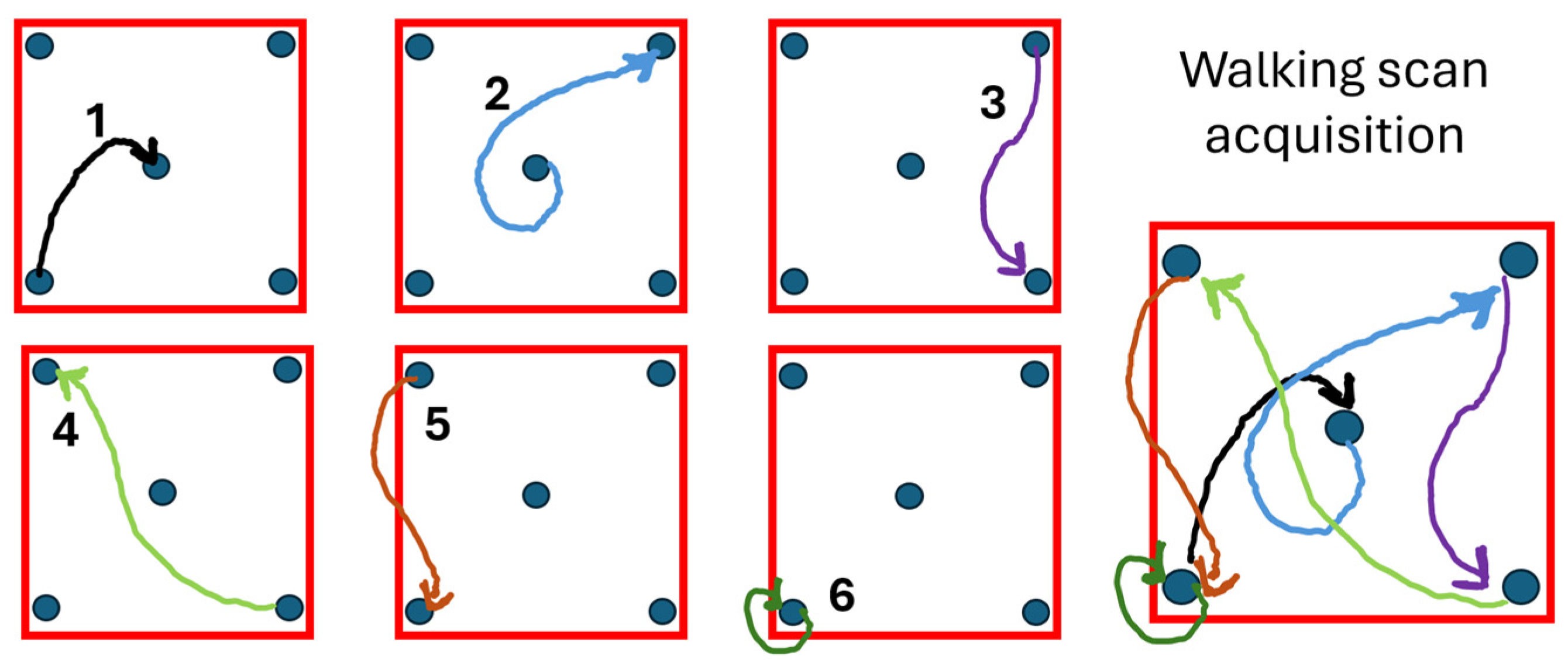
2.3.2. MLS Walking Scan Acquisition
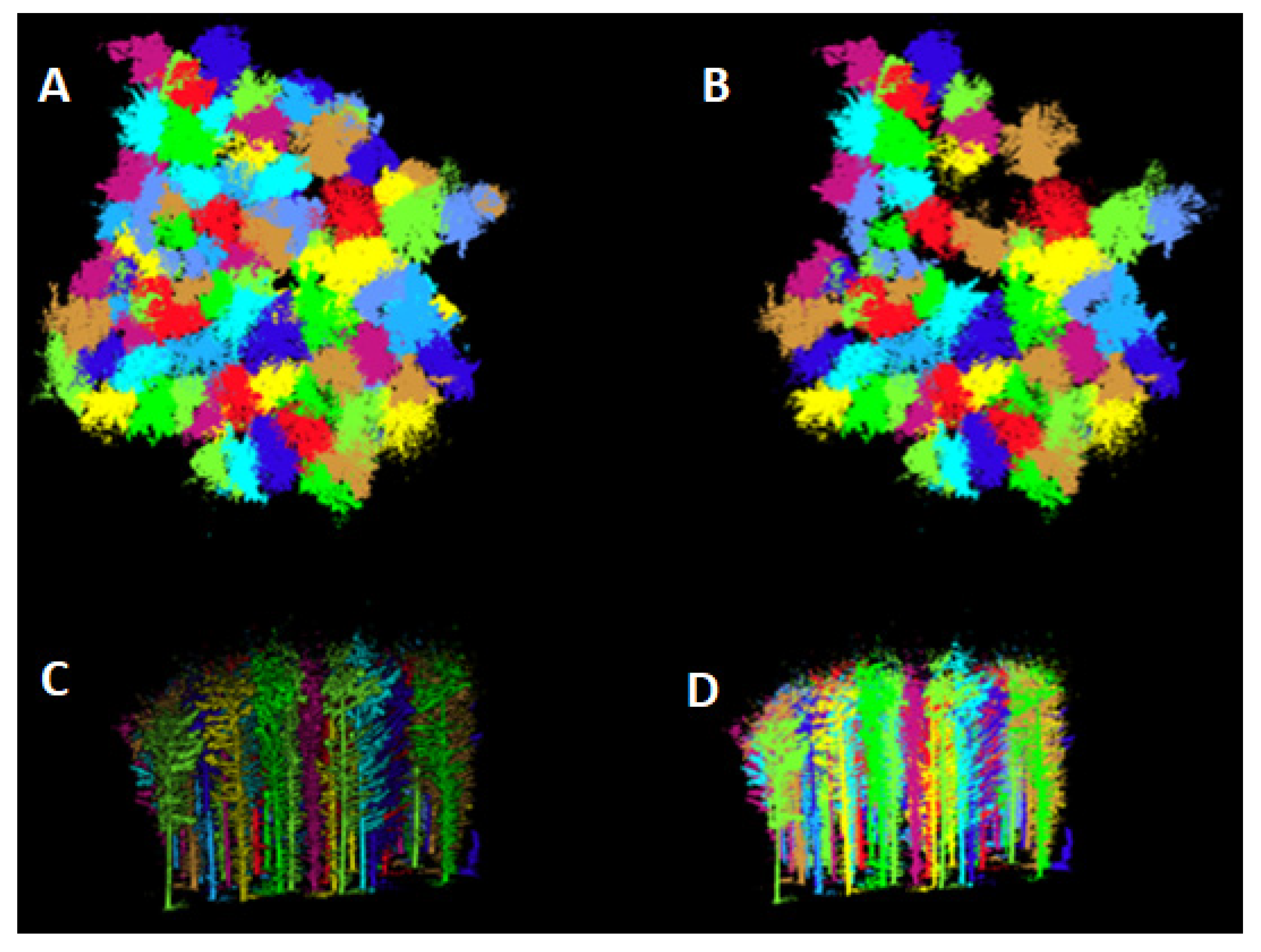
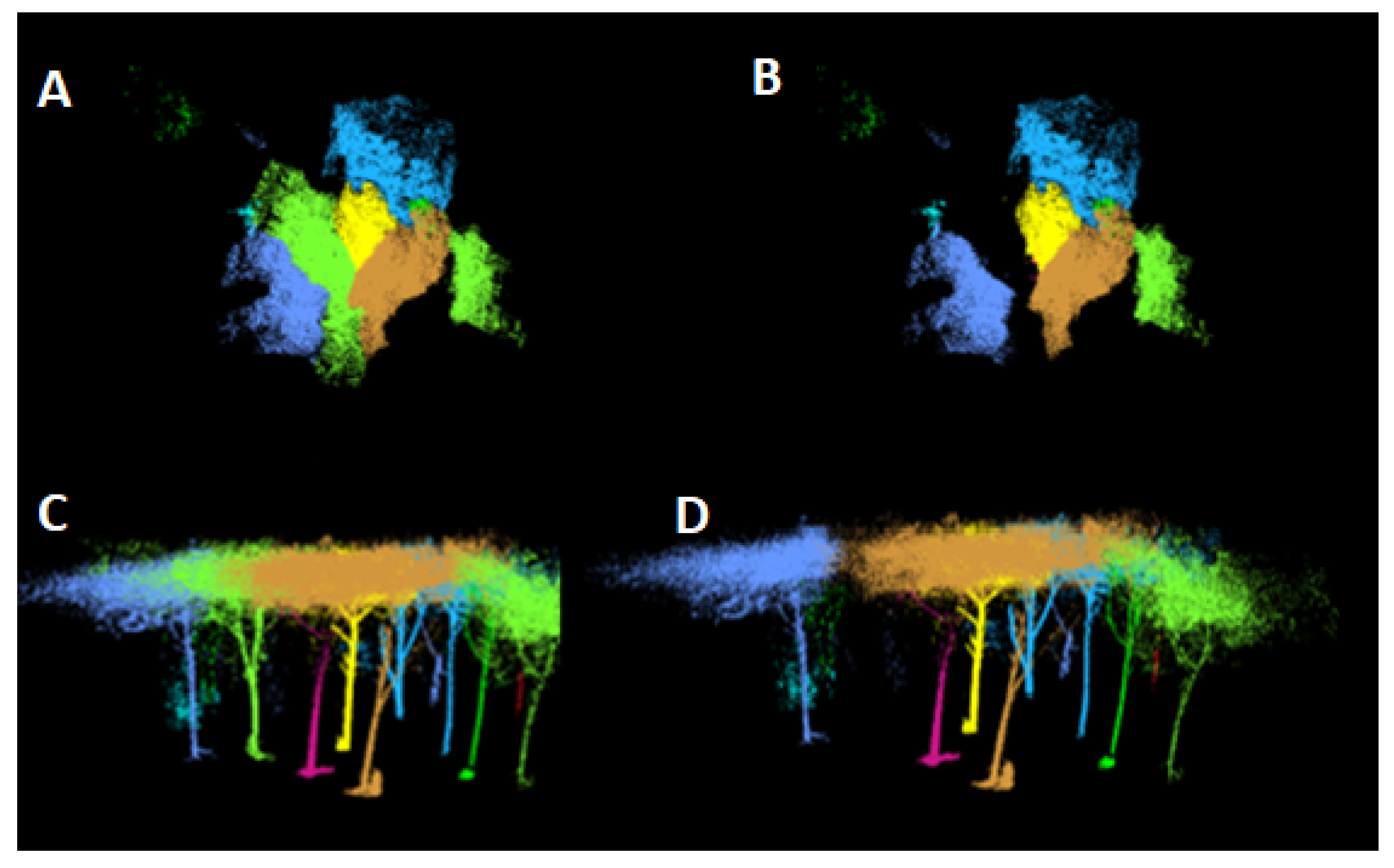
2.3.3. MLS Point Cloud Processing
2.4. Methodology
2.4.1. Comparison of Time and Costs Between Traditional and MLS Marteloscope Implementation
2.4.2. Simulation Forest Intervention Between Traditional and MLS Marteloscope
2.4.3. Evaluation of Forest Variables Assessment Between Traditional and MLS Marteloscope
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Commission. New EU Forest Strategy for 2030; 2021; pp. 5–24. Available online: https://efi.int/news/new-eu-forest-strategy-2030-new-understanding-sustainable-forest-management-2022-02-22 (accessed on 22 September 2024).
- Winkel, G.; Lovrić, M.; Muys, B.; Katila, P.; Lundhede, T.; Pecurul, M.; Pettenella, D.; Pipart, N.; Plieninger, T.; Prokofieva, I.; et al. Governing Europe’s Forests for Multiple Ecosystem Services: Opportunities, Challenges, and Policy Options. For. Policy Econ. 2022, 145, 102849. [Google Scholar] [CrossRef]
- Lier, M.; Köhl, M.; Korhonen, K.T.; Linser, S.; Prins, K.; Talarczyk, A. The New EU Forest Strategy for 2030: A New Understanding of Sustainable Forest Management? Forests 2022, 13, 245. [Google Scholar] [CrossRef]
- European Commission. Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions; European Commission: Brussels, Belgium, 2012. [Google Scholar]
- European Commission. EU Soil Strategy for 2030 Reaping the Benefits of Healthy Soils for People, Food, Nature and Climate; European Commission: Brussels, Belgium, 2021. [Google Scholar]
- Ramiro Troitiño, D. The European Commission, the Council, and the European Parliament: Differentiated Theoretical Frame for the Digital Revolution. In Digital Development of the European Union: An Interdisciplinary Perspective; Springer: Berlin/Heidelberg, Germany, 2023; pp. 349–361. [Google Scholar]
- European Commission. Guidelines on Closer-to-Nature Forest Management; European Commission: Brussels, Belgium, 2023; ISBN 9789268002070. [Google Scholar]
- Singh, R.; Gehlot, A.; Vaseem Akram, S.; Kumar Thakur, A.; Buddhi, D.; Kumar Das, P. Forest 4.0: Digitalization of Forest Using the Internet of Things (IoT). J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 5587–5601. [Google Scholar] [CrossRef]
- Prins, K.; Köhl, M.; Linser, S. Is the Concept of Sustainable Forest Management Still Fit for Purpose? For. Policy Econ. 2023, 157, 103072. [Google Scholar] [CrossRef]
- Nitoslawski, S.A.; Wong-Stevens, K.; Steenberg, J.W.N.; Witherspoon, K.; Nesbitt, L.; Konijnendijk van den Bosch, C.C. The Digital Forest: Mapping a Decade of Knowledge on Technological Applications for Forest Ecosystems. Earth’s Future 2021, 9, 1–28. [Google Scholar] [CrossRef]
- Urzedo, D.; Westerlaken, M.; Gabrys, J. Digitalizing Forest Landscape Restoration: A Social and Political Analysis of Emerging Technological Practices. Environ. Politics 2023, 32, 485–510. [Google Scholar] [CrossRef] [PubMed]
- Cadez, L.; Giannetti, F.; de Luca, A.; Tomao, A.; Chirici, G.; Alberti, G. A WebGIS Tool to Support Forest Management at Regional and Local Scale. IForest 2023, 16, 361–367. [Google Scholar] [CrossRef]
- Corona, P.; Marchi, E.; Chirici, G. Prospettive e Potenzialità della Digitalizzazione del Settore Forestale in Italia Linee Guida; Rete Rura-le Nazionale 2014–2020; Consiglio per la Ricerca in Agricoltura e l’Analisi Dell’Economia Agraria: Rome, Italy, 2022; ISBN 9788833852157. [Google Scholar]
- Chianucci, F.; Puletti, N.; Grotti, M.; Ferrara, C.; Giorcelli, A.; Coaloa, D.; Tattoni, C. Nondestructive Tree Stem and Crown Volume Allometry in Hybrid Poplar Plantations Derived from Terrestrial Laser Scanning. For. Sci. 2020, 66, 737–746. [Google Scholar] [CrossRef]
- D’Amico, G.; Vangi, E.; Francini, S.; Giannetti, F.; Nicolaci, A.; Travaglini, D.; Massai, L.; Giambastiani, Y.; Terranova, C.; Chirici, G. Are We Ready for a Web-Based National Forest Information System? State of the Art of for-Est Maps and Airborne Laser Scanning Data Availability in Italy. IForest 2021, 14, 144–154. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating Terrestrial and Airborne Laser Scanning for the Assessment of Single Tree Attributes in Mediterranean Forest Stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef]
- Venanzi, R.; Latterini, F.; Civitarese, V.; Picchio, R. Recent Applications of Smart Technologies for Monitoring the Sustainability of Forest Operations. Forests 2023, 14, 1503. [Google Scholar] [CrossRef]
- Tupinambá-Simões, F.; Pascual, A.; Guerra-Hernández, J.; Ordóñez, C.; de Conto, T.; Bravo, F. Assessing the Performance of a Handheld Laser Scanning System for Individual Tree Mapping—A Mixed Forests Showcase in Spain. Remote Sens. 2023, 15, 1169. [Google Scholar] [CrossRef]
- Waeber, P.O.; Melnykovych, M.; Riegel, E.; Chongong, L.V.; Lloren, R.; Raher, J.; Reibert, T.; Zaheen, M.; Soshenskyi, O.; Garcia, C.A. Fostering Innovation, Transition, and the Reconstruction of Forestry: Critical Thinking and Transdisciplinarity in Forest Education with Strategy Games. Forests 2023, 14, 1646. [Google Scholar] [CrossRef]
- MIPAF. Strategia Forestale Nazionale; MIPAF: Rome, Italy, 2021; ISBN 9788898850341. [Google Scholar]
- Chapin, F.S.; Carpenter, S.R.; Kofinas, G.P.; Folke, C.; Abel, N.; Clark, W.C.; Olsson, P.; Smith, D.M.S.; Walker, B.; Young, O.R.; et al. Ecosystem Stewardship: Sustainability Strategies for a Rapidly Changing Planet. Trends Ecol. Evol. 2010, 25, 241–249. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Kukko, A.; Balenović, I.; Saarinen, N.; Junttila, S.; Kankare, V.; Holopainen, M.; Mokroš, M.; Surový, P.; Kaartinen, H.; et al. Close-Range Remote Sensing of Forests: The State of the Art, Challenges, and Opportunities for Systems and Data Acquisitions. IEEE Geosci. Remote Sens. Mag. 2022, 10, 32–71. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Holm, S.; Riihimäki, H.; Krucher, A.; Griess, H.; Griess, V.C.; Schweier, J. Virtual Forests: A Review on Emerging Questions in the Use and Application of 3D Data in Forestry. Int. J. For. Eng. 2024, 35, 34–47. [Google Scholar] [CrossRef]
- Magnuson, R.; Erfanifard, Y.; Kulicki, M.; Gasica, T.A.; Tangwa, E.; Mielcarek, M.; Stereńczak, K. Mobile Devices in Forest Mensuration: A Review of Technologies and Methods in Single Tree Measurements. Remote Sens. 2024, 16, 3570. [Google Scholar] [CrossRef]
- Miller, J.; Morgenroth, J.; Gomez, C. 3D Modelling of Individual Trees Using a Handheld Camera: Accuracy of Height, Diameter and Volume Estimates. Urban For. Urban Green. 2015, 14, 932–940. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Ferrara, C.; Chianucci, F. Influence of Voxel Size and Point Cloud Density on Crown Cover Estimation in Poplar Plantations Using Terrestrial Laser Scanning. Ann. Silvic. Res. 2021, 46, 148–154. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual Tree Biomass Estimation Using Terrestrial Laser Scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Niță, M.D. Testing Forestry Digital Twinning Workflow Based on Mobile Lidar Scanner and Ai Platform. Forests 2021, 12, 1576. [Google Scholar] [CrossRef]
- Madrigal, G.; Sixto, H.; Oliveira, N.; Calama, R. Terrestrial Laser Scanning for Non-Destructive Estimation of Aboveground Biomass in Short-Rotation Poplar Coppices. Remote Sens. 2023, 15, 1942. [Google Scholar] [CrossRef]
- Calders, K.; Adams, J.; Armston, J.; Bartholomeus, H.; Bauwens, S.; Bentley, L.P.; Chave, J.; Danson, F.M.; Demol, M.; Disney, M.; et al. Terrestrial Laser Scanning in Forest Ecology: Expanding the Horizon. Remote Sens. Environ. 2020, 251, 112102. [Google Scholar] [CrossRef]
- Murtiyoso, A.; Cabo, C.; Singh, A.; Obaya, D.P.; Cherlet, W.; Stoddart, J.; Fol, C.R.; Beloiu Schwenke, M.; Rehush, N.; Stereńczak, K.; et al. A Review of Software Solutions to Process Ground-Based Point Clouds in Forest Applications. Curr. For. Rep. 2024, 10, 401–419. [Google Scholar] [CrossRef]
- Neudam, L.C.; Fuchs, J.M.; Mjema, E.; Johannmeier, A.; Ammer, C.; Annighöfer, P.; Paul, C.; Seidel, D. Simulation of Silvicultural Treatments Based on Real 3D Forest Data from Mobile Laser Scanning Point Clouds. Trees For. People 2023, 11, 100372. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; González-Ferreiro, E. 3D Point Clouds in Forest Remote Sensing. Remote Sens. 2021, 13, 2999. [Google Scholar] [CrossRef]
- Sofia, S.; Maetzke, F.G.; Crescimanno, M.; Coticchio, A.; La Mela Veca, D.S.; Galati, A. The Efficiency of LiDAR HMLS Scanning in Monitoring Forest Structure Parameters: Implications for Sustainable Forest Management. EuroMed J. Bus. 2022, 17, 350–373. [Google Scholar] [CrossRef]
- Faitli, T.; Hyyppä, E.; Hyyti, H.; Hakala, T.; Kaartinen, H.; Kukko, A.; Muhojoki, J.; Hyyppä, J. Integration of a Mobile Laser Scanning System with a Forest Harvester for Accurate Localization and Tree Stem Measurements. Remote Sens. 2024, 16, 3292. [Google Scholar] [CrossRef]
- Bravo-Oviedo, A.; Marchi, M.; Travaglini, D.; Pelleri, F.; Manetti, M.C.; Corona, P.; Cruz, F.; Bravo, F.; Nocentini, S. Adoption of New Silvicultural Methods in Mediterranean Forests: The Influence of Educational Background and Sociodemographic Factors on Marker Decisions. Ann. For. Sci. 2020, 77, 48. [Google Scholar] [CrossRef]
- Kruse, L.; Erefur, C.; Westin, J.; Ersson, B.T.; Pommerening, A. Towards a Benchmark of National Training Requirements for Continuous Cover Forestry (CCF) in Sweden. Trees For. People 2023, 12, 100391. [Google Scholar] [CrossRef]
- John, M.; Wirth, K.; Kaufmann, A.; Ertelt, H.; Frei, T. Forest Deliberations: Marteloscopes as Sites of Encounter between Climate Activists and Forest Managers. For. Policy Econ. 2024, 169, 103356. [Google Scholar] [CrossRef]
- O’Brien, L.; Derks, J.; Schuck, A. The Use of Marteloscopes in Science: A Review of Past Research and Suggestions for Further Application; 2022; pp. 1–26. Available online: http://iplus.efi.int/uploads/The_use_of_marteloscopes_in_science_FINAL_24_10.pdf (accessed on 24 September 2024).
- Maistrelli, F. I “Martelloscopi” in Alto Adige: 10 Anni D’ Esperienza Pratica Ed Evoluzione Futura. In Proceedings of the 2nd International Congress of Silviculture, Florence, Italy, 26–29 November 2014; pp. 859–863. [Google Scholar]
- Kükenbrink, D.; Marty, M.; Bösch, R.; Ginzler, C. Benchmarking Laser Scanning and Terrestrial Photogrammetry to Extract Forest Inventory Parameters in a Complex Temperate Forest. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102999. [Google Scholar] [CrossRef]
- Kadavý, J.; Kneiflová, J.; Kneifl, M.; Uherková, B. Using Marteloscope in Selection Forestry—Study Case from “Pokojná Hora” (Czech Republic). J. For. Sci. 2024, 70, 447–457. [Google Scholar] [CrossRef]
- Santopuoli, G.; Di Cristofaro, M.; Kraus, D.; Schuck, A.; Lasserre, B.; Marchetti, M. Biodiversity Conservation and Wood Production in a Natura 2000 Mediterranean Forest. A Trade-off Evaluation Focused on the Occurrence of Microhabitats. IForest 2019, 12, 76–84. [Google Scholar] [CrossRef]
- European Forest Institute. Integrate + Marteloscopes. 2015. Available online: http://www.integrateplus.org/uploads/Files/publications%20updated/20170113_Marteloscope_Methodology_Final.pdf (accessed on 24 September 2024).
- Vandendaele, B.; Martin-Ducup, O.; Fournier, R.A.; Pelletier, G.; Lejeune, P. Mobile Laser Scanning for Estimating Tree Structural Attributes in a Temperate Hardwood Forest. Remote Sens. 2022, 14, 4522. [Google Scholar] [CrossRef]
- Garbelotto, M.; Gonthier, P. Biology, Epidemiology, and Control of Heterobasidion Species Worldwide. Annu. Rev. Phytopathol. 2013, 51, 39–59. [Google Scholar] [CrossRef]
- Capretti, P. Dalle Abetine Di Vallombrosa Nuovi Spunti per La Ricerca in Patologia Forestale. L’Italia For. Mont. 2005, 60, 217–220. [Google Scholar]
- Piussi, P.; Alberti, G. Selvicoltura Generale. Boschi, Società e Tecniche Colturali; Compagnia delle Foreste: Arezzo, Italy, 2015; ISBN 9788898850112. [Google Scholar]
- Gei, F.; Fastelli, D.; Maetzke, F.G.; Gestri, G.; Peruzzi, L. Calvana e Monte Morello. Due Rilievi a Confronto. Geografia, Geologia, Climatologia, Rimboschimenti, Vegetazione e Flora Vascolare; Tipografia Linari: Florence, Italy, 2016; ISBN 9788887553222. [Google Scholar]
- Paletto, A.; De Meo, I.; Cantiani, P.; Guerrini, S.; Lagomarsino, A. Social Perception of Forest Management: The Case of the Peri-Urban Forest of Monte Morello (Florence, Italy). For. Riv. Selvic. Ecol. For. 2018, 15, 29–39. [Google Scholar] [CrossRef]
- De Frutos, S.; Bravo-Fernández, J.A.; Roig-Gómez, S.; Del Río, M.; Ruiz-Peinado, R. Natural Regeneration and Species Diversification after Seed-Tree Method Cutting in a Maritime Pine Reforestation. IForest 2022, 15, 500–508. [Google Scholar] [CrossRef]
- Chudy, R.; Cubbage, F.; Siry, J.; Chudy, J. The Profitability of Artificial and Natural Regeneration: A Forest Investment Comparison of Poland and the U.S. South. J. For. Bus. Res. 2023, 1, 1–20. [Google Scholar] [CrossRef]
- Bianchi, L.; Giovannini, G.; Paci, M. La Selvicoltura Delle Pinete Della Toscana. (Pine Forestry in Tuscany); Agenzia Regionale per lo Sviluppo e l’Innovazione nel settore Agricolo-forestale, Press Service, Sesto Fiorentino (FI): Florence, Italy, 2005; ISBN 88-8295-064-6. [Google Scholar]
- Bernetti, G. Botanica e Selvicoltura—26 Il Taglio A Buche Nella Rinaturalizzazione Delle Pinete D’impianto. L’Italia For. Mont. 2003, 58, 143–145. [Google Scholar]
- Chirici, G.; Giannetti, F.; D’Amico, G.; Vangi, E.; Francini, S.; Borghi, C.; Corona, P.; Travaglini, D. Robotics in Forest Inventories: SPOT’s First Steps. Forests 2023, 14, 2170. [Google Scholar] [CrossRef]
- Tabacchi, G.; Di Cosmo, L.; Gasparini, P.; Morelli, S. Stima del Volume e Della Fitomassa Delle Principali Specie Forestali Italiane; Equazioni di previsione, tavole del volume e tavole della fitomassa arborea epigea; Consiglio per la Ricerca e la sperimentazione in Agricoltura, Unità di Ricerca per il Monitoraggio e la Pianificazione Forestale: Trento, Italy, 2011; ISBN 9788897081111. [Google Scholar]
- Green Valley International LiDAR360 V5.0 User Guide Imprint and Version. 2021. Available online: https://greenvalleyintl.com/static/upload/file/20210817/1629190611196646.pdf (accessed on 24 September 2024).
- Shang, C.; Treitz, P.; Caspersen, J.; Jones, T. Estimation of Forest Structural and Compositional Variables Using ALS Data and Multi-Seasonal Satellite Imagery. Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 360–371. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting Tree Crowns from Terrestrial and Mobile LiDAR Data by Exploring Ecological Theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Ministero Di Grazia E Giustizia. 14 Maggio 1991, n. 232. Approvazione Delle Deliberazioni in Data 18 Dicembre 1986 e 12 Settembre 1990 Del Consiglio Nazionale Dei Dottori Agronomi e Forestali Concernenti La Tariffa Professionale Della Categoria; 1991; pp. 1–47. Available online: https://www.conaf.it/sites/default/files/tariffe_professionali.pdf (accessed on 24 September 2024).
- Tiede, J.; Reinke, K.; Jones, S. Evaluating the Efficacy of Sampling Acquisition Paths for Mapping Vegetation Structure Using Terrestrial Mobile Laser Scanning. Ecol. Inform. 2024, 82, 102675. [Google Scholar] [CrossRef]
- Zhang, Q.; Cai, S.; Liang, X. Individual Tree Segmentation in Occluded Complex Forest Stands through Ellipsoid Directional Searching and Point Compensation. For. Ecosyst. 2024, 11, 100238. [Google Scholar] [CrossRef]
- Hell, M.; Brandmeier, M.; Briechle, S.; Krzystek, P. Classification of Tree Species and Standing Dead Trees with Lidar Point Clouds Using Two Deep Neural Networks: PointCNN and 3DmFV-Net. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2022, 90, 103–121. [Google Scholar] [CrossRef]
- Marchi, N.; Pirotti, F.; Lingua, E. Airborne and Terrestrial Laser Scanning Data for the Assessment of Standing and Lying Deadwood: Current Situation and New Perspectives. Remote Sens. 2018, 10, 1356. [Google Scholar] [CrossRef]
- Jurjević, L.; Liang, X.; Gašparović, M.; Balenović, I. Is Field-Measured Tree Height as Reliable as Believed—Part II, A Comparison Study of Tree Height Estimates from Conventional Field Measurement and Low-Cost Close-Range Remote Sensing in a Deciduous Forest. ISPRS J. Photogramm. Remote Sens. 2020, 169, 227–241. [Google Scholar] [CrossRef]
- Schneider, F.D.; Kükenbrink, D.; Schaepman, M.E.; Schimel, D.S.; Morsdorf, F. Quantifying 3D Structure and Occlusion in Dense Tropical and Temperate Forests Using Close-Range LiDAR. Agric. For. Meteorol. 2019, 268, 249–257. [Google Scholar] [CrossRef]
- Larjavaara, M.; Muller-Landau, H.C. Measuring Tree Height: A Quantitative Comparison of Two Common Field Methods in a Moist Tropical Forest. Methods Ecol. Evol. 2013, 4, 793–801. [Google Scholar] [CrossRef]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is Field-Measured Tree Height as Reliable as Believed—A Comparison Study of Tree Height Estimates from Field Measurement, Airborne Laser Scanning and Terrestrial Laser Scanning in a Boreal Forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Bazezew, M.N.; Hussin, Y.A.; Kloosterman, E.H. Integrating Airborne LiDAR and Terrestrial Laser Scanner Forest Parameters for Accurate Above-Ground Biomass/Carbon Estimation in Ayer Hitam Tropical Forest, Malaysia. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 638–652. [Google Scholar] [CrossRef]
- Gao, S.; Zhang, Z.; Cao, L. Individual Tree Structural Parameter Extraction and Volume Table Creation Based on Near-field Lidar Data: A Case Study in a Subtropical Planted Forest. Sensors 2021, 21, 8162. [Google Scholar] [CrossRef]
- Li, X.; Wu, J.; Lu, S.; Li, D.; Lu, D. Integration of Handheld and Airborne Lidar Data for Dicranopteris Dichotoma Biomass Estimation in a Subtropical Region of Fujian Province, China. Remote Sens. 2024, 16, 2088. [Google Scholar] [CrossRef]
- Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests 2019, 1, 277. [Google Scholar] [CrossRef]
- Soudarissanane, S.; Lindenbergh, R.; Menenti, M.; Teunissen, P. Scanning Geometry: Influencing Factor on the Quality of Terrestrial Laser Scanning Points. ISPRS J. Photogramm. Remote Sens. 2011, 66, 389–399. [Google Scholar] [CrossRef]
- Wilkes, P.; Lau, A.; Disney, M.; Calders, K.; Burt, A.; Gonzalez de Tanago, J.; Bartholomeus, H.; Brede, B.; Herold, M. Data Acquisition Considerations for Terrestrial Laser Scanning of Forest Plots. Remote Sens. Environ. 2017, 196, 140–153. [Google Scholar] [CrossRef]
- Seidel, D.; Fleck, S.; Leuschner, C. Analyzing Forest Canopies with Ground-Based Laser Scanning: A Comparison with Hemispherical Photography. Agric. For. Meteorol. 2012, 154–155, 1–8. [Google Scholar] [CrossRef]
- Bogdanovich, E.; Perez-Priego, O.; El-Madany, T.S.; Guderle, M.; Pacheco-Labrador, J.; Levick, S.R.; Moreno, G.; Carrara, A.; Pilar Martín, M.; Migliavacca, M. Using Terrestrial Laser Scanning for Characterizing Tree Structural Parameters and Their Changes under Different Management in a Mediterranean Open Woodland. For. Ecol. Manag. 2021, 486, 118945. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Type | Traditional Marteloscope | MLS Marteloscope | Difference Δtime | ||||
|---|---|---|---|---|---|---|---|
| Acquisition | Processing | Total Time | Acquisition | Processing | Total Time | Total Time | |
| (hh:mm) | (hh:mm) | (hh:mm) | (hh:mm) | (hh:mm) | (hh:mm) | (hh:mm) | |
| Douglas-fir | 01:14 | 00:47 | 02:01 | 00:15 | 01:03 | 01:18 | 00:43 |
| Italian cypress | 03:26 | 00:51 | 04:17 | 00:14 | 00:59 | 01:13 | 03:04 |
| Stone pine | 00:54 | 00:39 | 01:33 | 00:10 | 00:43 | 00:53 | 00:40 |
| Forest type | Traditional Marteloscope Cost (EUR) | MLS Marteloscope Cost (EUR) | Difference Δcost (EUR) |
|---|---|---|---|
| Douglas-fir | 142.92 | 38.75 | 104.2 |
| Italian cypress | 364.58 | 36.25 | 328.3 |
| Stone pine | 106.25 | 26.25 | 80.0 |
| Forest Type | Traditional Marteloscope | MLS Marteloscope | Differences for Density | Differences for Volume | ||
|---|---|---|---|---|---|---|
| N (tree) | GSV (m3) | N (tree) | GSV (m3) | ΔN (tree) | ΔGSV (m3) | |
| Douglas-fir | 88 | 264.77 | 89 | 236.95 | −1 | 27.82 |
| Italian cypress | 184 | 76.25 | 267 | 112.51 | −184 | −36.26 |
| Stone pine | 13 | 66.25 | 13 | 42.70 | 0 | 23.55 |
| Forest Type | GSV RMSE | GSV RMSE% | GSV Bias |
|---|---|---|---|
| Douglas-fir | 2.97 | 1.12 | 2.69 |
| Italian cypress | 2.67 | 3.51 | 0.61 |
| Stone pine | 6.53 | 9.86 | 3.28 |
| Forest Type | Silvicultural Operation | Traditional Marteloscope | MLS Marteloscope | Difference in Density | Difference in Volume | ||
|---|---|---|---|---|---|---|---|
| N (tree) | GSV (m3) | N | GSV (m3) | ΔN (tree) | ΔGSV (m3) | ||
| Douglas-fir | From-below thinning | 30 | 25.16 | 30 | 26.28 | 0 | −1.11 |
| Italian cypress | From-below thinning | 71 | 9.70 | 71 | 6.57 | 0 | 3.12 |
| Selective thinning | 49 | 16.71 | 50 | 49.32 | −1 | −32.61 | |
| Geometric thinning | 68 | 28.85 | 76 | 36.27 | −8 | −7.42 | |
| Stone pine | Gap cutting | 1 | 3.96 | 1 | 3.74 | 0 | 0.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giannetti, F.; Passarino, L.; Aleandri, G.; Borghi, C.; Vangi, E.; Anzilotti, S.; Raddi, S.; Chirici, G.; Travaglini, D.; Maltoni, A.; et al. Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region. Forests 2024, 15, 2202. https://doi.org/10.3390/f15122202
Giannetti F, Passarino L, Aleandri G, Borghi C, Vangi E, Anzilotti S, Raddi S, Chirici G, Travaglini D, Maltoni A, et al. Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region. Forests. 2024; 15(12):2202. https://doi.org/10.3390/f15122202
Chicago/Turabian StyleGiannetti, Francesca, Livia Passarino, Gianfrancesco Aleandri, Costanza Borghi, Elia Vangi, Solaria Anzilotti, Sabrina Raddi, Gherardo Chirici, Davide Travaglini, Alberto Maltoni, and et al. 2024. "Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region" Forests 15, no. 12: 2202. https://doi.org/10.3390/f15122202
APA StyleGiannetti, F., Passarino, L., Aleandri, G., Borghi, C., Vangi, E., Anzilotti, S., Raddi, S., Chirici, G., Travaglini, D., Maltoni, A., Mariotti, B., Bravo-Oviedo, A., Giambastiani, Y., Rossi, P., & D’Amico, G. (2024). Efficiency of Mobile Laser Scanning for Digital Marteloscopes for Conifer Forests in the Mediterranean Region. Forests, 15(12), 2202. https://doi.org/10.3390/f15122202