
BPN-YOLO: A Novel Method for Wood Defect Detection Based on YOLOv7

 ,
,
Abstract
1. Introduction
- A wood defect detection model based on YOLOv7, named BPN-YOLO, is proposed, which improves the performance of the model for wood defect detection.
- By integrating the Biformer attention mechanism into BPN-YOLO, the model gains flexibility in computational allocation and content perception, enabling dynamic query-aware sparsity that enhances wood defect detection accuracy.
- By replacing the 3 × 3 ordinary convolution of the efficient layer aggregation network (ELAN) module of the backbone network with Pconv partial convolution, unnecessary redundant computations and memory accesses are reduced to improve the detection performance.
- By utilizing the NWD loss function, the sensitivity of the original loss function to the deviation of the position of small defect is solved, and thus the accuracy of wood defect detection is greatly improved.
2. Materials and Methods
2.1. Materials
Dataset Acquisition
2.2. Methods
2.2.1. YOLOv7 Network Structure
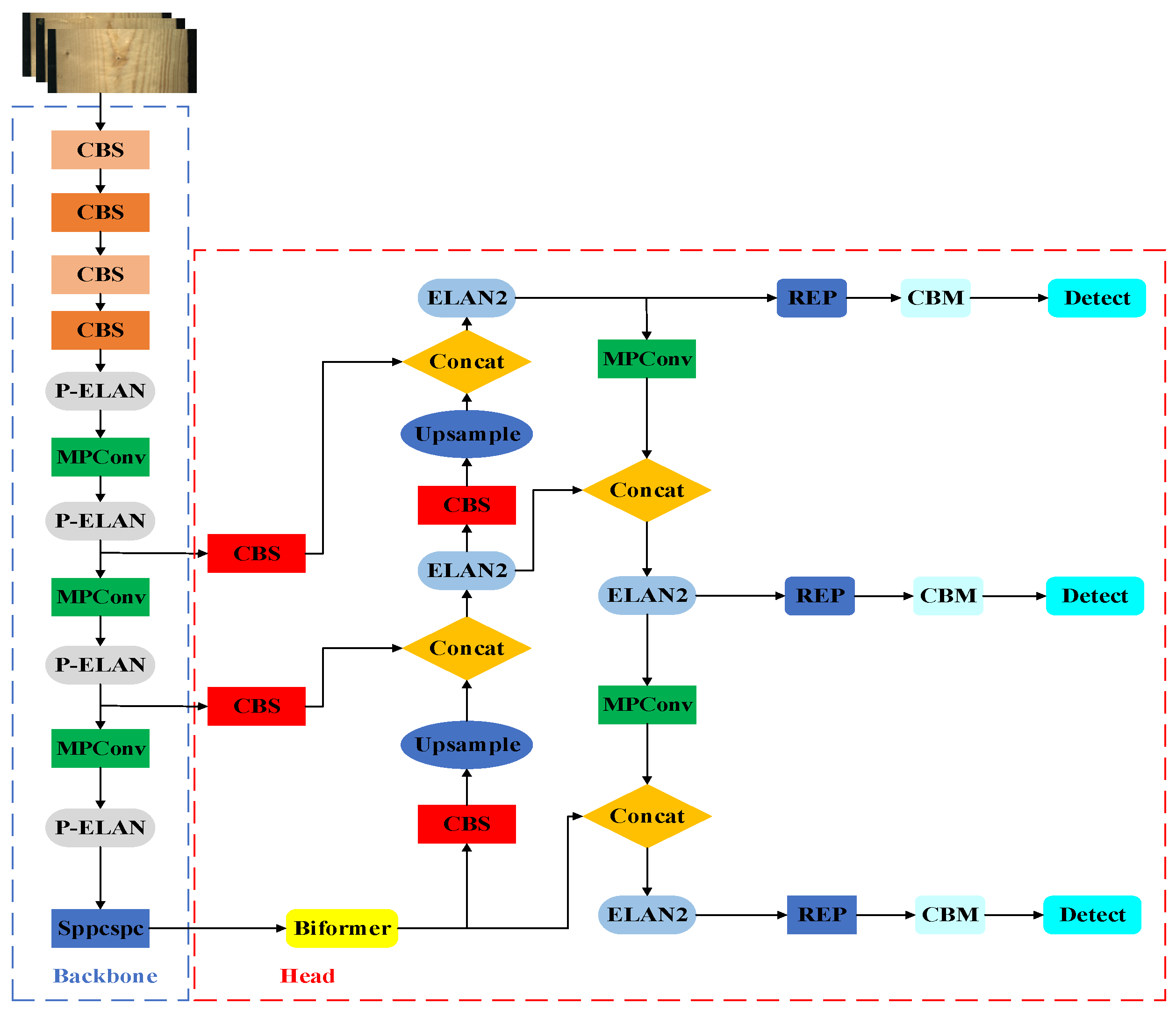
2.2.2. BPN-YOLO
P-ELAN Module
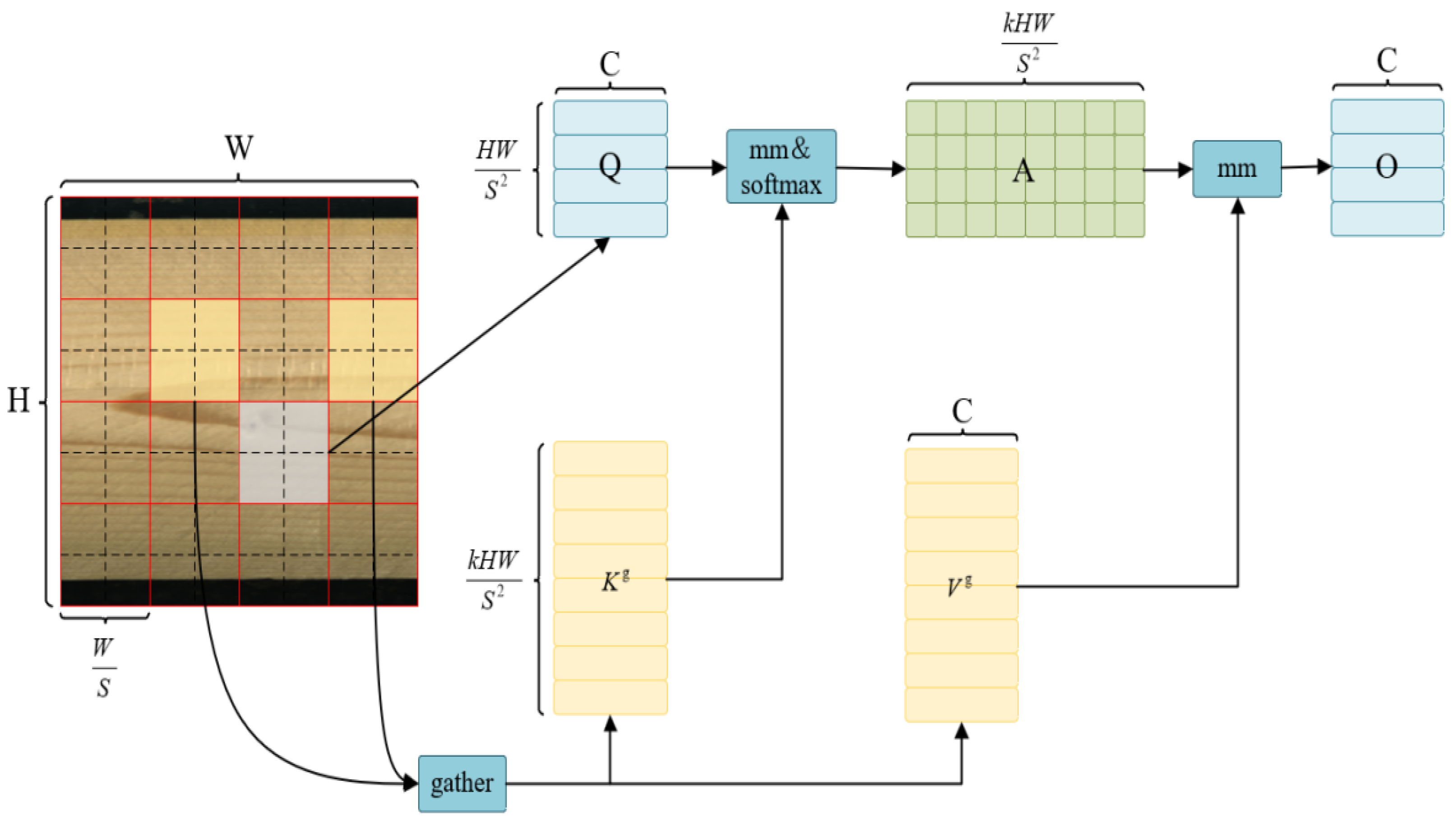
Biformer Attention Mechanism
NWD Loss Function
3. Experiment and Results
3.1. Experimental Details
3.2. Performance Evaluation
3.3. Ablation Experiments
- (1)
- The addition of the ECA attention mechanism improves the mAP value by 2.3% over the original model. This is because the ECA attention mechanism is able to evaluate the importance of each feature channel, and by assigning different weights to each channel, it enables the network to pay more attention to the feature channels that are critical to the task. However, ECA reduces the computational complexity by global average pooling, so this operation may lose some positional information.
- (2)
- CBAM improves the mAP value by 0.9%. Because CBAM fuses channel attention and spatial attention together, it enables the model to capture important feature information in different dimensions simultaneously. This fusion helps the model to understand the intrinsic structure of the input data more comprehensively, which improves the accuracy of detection. However, CBAM extracts attentional information over space and channels by performing multiple convolutions and pooling of the input, which increases computational complexity and reduces real-time responsiveness.
- (3)
- The mAP value of EMA is reduced by 3.1%. This may be due to the fact that EMA focuses on different feature regions at multiple scales of attentional mechanisms. In some cases, this multiscale attention may lead to distraction of attention from effectively focusing on the critical regions of wood defects, thus affecting detection accuracy.
- (4)
- The mAP value of SK decreased by 1.5%. This may be due to the SK mechanism tuning the receptive field by dynamically selecting the convolutional kernel size, but this may not match the existing receptive field design in the YOLOv7 network. Features of wood defects may require a specific size of receptive field to be detected optimally, and the dynamic tuning of SK attention may fail to optimize this.
- (5)
- The mAP value of SSA was reduced by 0.9%. This may be due to the fact that SSA introduces attentional weights by introducing them at different locations in the sequence, which may lead to a dispersion of the model’s attentional resources. In the wood defect detection task, the model may need to concentrate on specific defect features, and the introduction of SSA may make it difficult for the model to concentrate on this critical information, thus affecting the detection accuracy.
- (6)
- Biformer provides the highest improvement in mAP value among all the comparison modules, with a 2.8% improvement over the original model. This is because Biformer is able to consider both global and local information of the input sequence. It efficiently captures long-range dependencies and local patterns in sequences by using two attention heads, one focusing on global information and one on local information. This design helps to better handle the complex and multi-scale features in the wood defect detection task.
3.4. Comparisons with Other Methods and Experiments
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, R.; Liang, F.; Wang, B.; Mou, X. ODCA-YOLO: An Omni-Dynamic Convolution Coordinate Attention-Based YOLO for Wood Defect Detection. Forests 2023, 14, 1885. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, C.; Ren, Z.; Na, B. Review of the Current State of Application of Wood Defect Recognition Technology. BioResources 2022, 18, 2288–2302. [Google Scholar] [CrossRef]
- Deflorio, G.; Fink, S.; Schwarze, F.W.M.R. Detection of Incipient Decay in Tree Stems with Sonic Tomography after Wounding and Fungal Inoculation. Wood Sci. Technol. 2008, 42, 117–132. [Google Scholar] [CrossRef]
- Palma, S.S.A.; Goncalves, R.; Trinca, A.J.; Costa, C.P.; Reis, M.N.D.; Martins, G.A. Interference from Knots, Wave Propagation Direction, and Effect of Juvenile and Reaction Wood on Velocities in Ultrasound Tomography. BioResources 2018, 13, 2834–2845. [Google Scholar] [CrossRef]
- Espinosa, L.; Brancheriau, L.; Cortes, Y.; Prieto, F.; Lasaygues, P. Ultrasound Computed Tomography on Standing Trees: Accounting for Wood Anisotropy Permits a More Accurate Detection of Defects. Ann. For. Sci. 2020, 77, 68. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, X.; Yang, S. Predicting Density and Moisture Content of Populus Xiangchengensis and Phyllostachys Edulis Using the X-Ray Computed Tomography Technique. For. Prod. J. 2020, 70, 193–199. [Google Scholar] [CrossRef]
- Stängle, S.M.; Brüchert, F.; Heikkila, A.; Usenius, T.; Usenius, A.; Sauter, U.H. Potentially Increased Sawmill Yield from Hardwoods Using X-Ray Computed Tomography for Knot Detection. Ann. For. Sci. 2015, 72, 57–65. [Google Scholar] [CrossRef]
- Chen, L.-C.; Pardeshi, M.S.; Lo, W.-T.; Sheu, R.-K.; Pai, K.-C.; Chen, C.-Y.; Tsai, P.-Y.; Tsai, Y.-T. Edge-Glued Wooden Panel Defect Detection Using Deep Learning. Wood Sci. Technol. 2022, 56, 477–507. [Google Scholar] [CrossRef]
- Peng, Z.; Yue, L.; Xiao, N. Simultaneous Wood Defect and Species Detection with 3D Laser Scanning Scheme. Int. J. Opt. 2016, 2016, 7049523. [Google Scholar] [CrossRef]
- He, T.; Liu, Y.; Xu, C.; Zhou, X.; Hu, Z.; Fan, J. A Fully Convolutional Neural Network for Wood Defect Location and Identification. IEEE Access 2019, 7, 123453–123462. [Google Scholar] [CrossRef]
- Hu, C.; Tanaka, C.; Ohtani, T. Locating and Identifying Splits and Holes on Sugi by the Laser Displacement Sensor. J. Wood Sci. 2003, 49, 492–498. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Wang, B.; Yang, C.; Deng, L. Detection Method of Timber Defects Based on Target Detection Algorithm. Measurement 2022, 203, 111937. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; IEEE: Columbus, OH, USA, 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. arXiv 2015, arXiv:1504.08083. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. arXiv 2016, arXiv:1506.01497. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. arXiv 2018, arXiv:1703.06870. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 9905, pp. 21–37. ISBN 978-3-319-46447-3. [Google Scholar]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. arXiv 2018, arXiv:1708.02002. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. arXiv 2016, arXiv:1612.08242. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Qiao, S.; Chen, L.-C.; Yuille, A. DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution. arXiv 2020, arXiv:2006.02334. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Fan, J.N.; Liu, Y.; Hu, Z.K.; Zhao, Q. A defect detection and recognition system for solid wood boards based on Faster R-CNN. J. For. Eng. 2019, 4, 112–117. [Google Scholar] [CrossRef]
- Meng, W.; Yuan, Y. SGN-YOLO: Detecting Wood Defects with Improved YOLOv5 Based on Semi-Global Network. Sensors 2023, 23, 8705. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Yang, C.; Ding, Y.; Qin, G. Detection of Wood Surface Defects Based on Improved YOLOv3 Algorithm. BioResources 2021, 16, 6766–6780. [Google Scholar] [CrossRef]
- Gao, M.; Wang, F.; Song, P.; Liu, J.; Qi, D. BLNN: Multiscale Feature Fusion-Based Bilinear Fine-Grained Convolutional Neural Network for Image Classification of Wood Knot Defects. J. Sens. 2021, 2021, 8109496. [Google Scholar] [CrossRef]
- Kodytek, P.; Bodzas, A.; Bilik, P. A Large-Scale Image Dataset of Wood Surface Defects for Automated Vision-Based Quality Control Processes. F1000Research 2021, 10, 581. [Google Scholar] [CrossRef] [PubMed]
- Jiang, K.; Xie, T.; Yan, R.; Wen, X.; Li, D.; Jiang, H.; Jiang, N.; Feng, L.; Duan, X.; Wang, J. An Attention Mechanism-Improved YOLOv7 Object Detection Algorithm for Hemp Duck Count Estimation. Agriculture 2022, 12, 1659. [Google Scholar] [CrossRef]
- Yang, S.; Xing, Z.; Wang, H.; Dong, X.; Gao, X.; Liu, Z.; Zhang, X.; Li, S.; Zhao, Y. Maize-YOLO: A New High-Precision and Real-Time Method for Maize Pest Detection. Insects 2023, 14, 278. [Google Scholar] [CrossRef] [PubMed]
- Gallo, I.; Rehman, A.U.; Dehkordi, R.H.; Landro, N.; La Grassa, R.; Boschetti, M. Deep Object Detection of Crop Weeds: Performance of YOLOv7 on a Real Case Dataset from UAV Images. Remote Sens. 2023, 15, 539. [Google Scholar] [CrossRef]
- Chen, J.; Kao, S.; He, H.; Zhuo, W.; Wen, S.; Lee, C.-H.; Chan, S.-H.G. Run, Don’t Walk: Chasing Higher FLOPS for Faster Neural Networks. arXiv 2023, arXiv:2303.03667. [Google Scholar]
- Wang, J.; Li, Y.; Wang, J.; Li, Y. An Underwater Dense Small Object Detection Model Based on YOLOv5-CFDSDSE. Electronics 2023, 12, 3231. [Google Scholar] [CrossRef]
- Wang, G.; Chen, Y.; An, P.; Hong, H.; Hu, J.; Huang, T. UAV-YOLOv8: A Small-Object-Detection Model Based on Improved YOLOv8 for UAV Aerial Photography Scenarios. Sensors 2023, 23, 7190. [Google Scholar] [CrossRef] [PubMed]
- Ye, Y.; Ren, X.; Zhu, B.; Tang, T.; Tan, X.; Gui, Y.; Yao, Q. An Adaptive Attention Fusion Mechanism Convolutional Network for Object Detection in Remote Sensing Images. Remote Sens. 2022, 14, 516. [Google Scholar] [CrossRef]
- Saydirasulovich, S.N.; Mukhiddinov, M.; Djuraev, O.; Abdusalomov, A.; Cho, Y.-I. An Improved Wildfire Smoke Detection Based on YOLOv8 and UAV Images. Sensors 2023, 23, 8374. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L.; Wang, X.; Ke, Z.; Zhang, W.; Lau, R. BiFormer: Vision Transformer with Bi-Level Routing Attention. arXiv 2023, arXiv:2303.08810. [Google Scholar]
- Wang, Q.; Yang, L.; Zhou, B.; Luan, Z.; Zhang, J. YOLO-SS-Large: A Lightweight and High-Performance Model for Defect Detection in Substations. Sensors 2023, 23, 8080. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xu, C.; Yang, W.; Yu, L. A Normalized Gaussian Wasserstein Distance for Tiny Object Detection. arXiv 2022, arXiv:2110.13389. [Google Scholar]
- Zeng, Y.; Zhang, T.; He, W.; Zhang, Z. YOLOv7-UAV: An Unmanned Aerial Vehicle Image Object Detection Algorithm Based on Improved YOLOv7. Electronics 2023, 12, 3141. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. arXiv 2020, arXiv:1910.03151. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Computer Vision—ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11211, pp. 3–19. ISBN 978-3-030-01233-5. [Google Scholar]
- Ouyang, D.; He, S.; Zhang, G.; Luo, M.; Guo, H.; Zhan, J.; Huang, Z. Efficient Multi-Scale Attention Module with Cross-Spatial Learning. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar]
- Li, X.; Wang, W.; Hu, X.; Yang, J. Selective Kernel Networks. arXiv 2019, arXiv:1903.06586. [Google Scholar]
- Liu, H.; Liu, F.; Fan, X.; Huang, D. Polarized Self-Attention: Towards High-Quality Pixel-Wise Regression. arXiv 2021, arXiv:2107.00782. [Google Scholar]
- Zhang, Q.; Liu, L.; Yang, Z.; Yin, J.; Jing, Z. WLSD-YOLO: A Model for Detecting Surface Defects in Wood Lumber. IEEE Access 2024, 12, 65088–65098. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Defect Type | Number of Occurrences | Number of Images with the Defect | Images in the Dataset (%) |
|---|---|---|---|
| Live_Knot | 4070 | 2256 | 62.7 |
| Marrow | 206 | 191 | 5.3 |
| Resin | 650 | 523 | 14.5 |
| Dead_Knot | 2934 | 1875 | 52.1 |
| Knot_with_crack | 542 | 398 | 11.1 |
| Knot_missing | 121 | 110 | 3.1 |
| Crack | 517 | 371 | 10.3 |
| Without any defects | 7 | — | 0.2 |
| Methods | mAP | AP | ||||||
|---|---|---|---|---|---|---|---|---|
| Live_Knot | Marrow | Resin | Dead_Knot | Knot_with_Crack | Knot_Missing | Crack | ||
| YOLOv7 | 0.744 | 0.827 | 0.766 | 0.715 | 0.830 | 0.560 | 0.816 | 0.692 |
| YOLOv7 + BF | 0.772 | 0.840 | 0.818 | 0.743 | 0.852 | 0.597 | 0.811 | 0.746 |
| YOLOv7 + PC | 0.772 | 0.829 | 0.846 | 0.783 | 0.840 | 0.620 | 0.731 | 0.756 |
| YOLOv7 + NWD | 0.791 | 0.825 | 0.875 | 0.744 | 0.830 | 0.629 | 0.835 | 0.771 |
| BPN-YOLO | 0.818 | 0.844 | 0.857 | 0.812 | 0.839 | 0.654 | 0.922 | 0.797 |
| Methods | mAP | AP | ||||||
|---|---|---|---|---|---|---|---|---|
| Live_Knot | Marrow | Resin | Dead_Knot | Knot_with_Crack | Knot_Missing | Crack | ||
| YOLOv7 | 0.744 | 0.827 | 0.766 | 0.715 | 0.830 | 0.560 | 0.816 | 0.692 |
| YOLOv7 + ECA | 0.767 | 0.824 | 0.774 | 0.801 | 0.866 | 0.600 | 0.775 | 0.731 |
| YOLOv7 + CBAM | 0.751 | 0.811 | 0.844 | 0.714 | 0.797 | 0.571 | 0.795 | 0.727 |
| YOLOv7 + EMA | 0.713 | 0.805 | 0.764 | 0.791 | 0.813 | 0.442 | 0.729 | 0.645 |
| YOLOv7 + SK | 0.729 | 0.766 | 0.793 | 0.702 | 0.793 | 0.493 | 0.894 | 0.659 |
| YOLOv7 + SSA | 0.735 | 0.820 | 0.774 | 0.760 | 0.820 | 0.476 | 0.759 | 0.736 |
| YOLOv7 + BF | 0.772 | 0.840 | 0.818 | 0.743 | 0.852 | 0.597 | 0.811 | 0.746 |
| Methods | Live_Knot | Marrow | Resin | Dead_Knot | Knot_with_Crack | Knot_Missing | Crack |
|---|---|---|---|---|---|---|---|
| Inference Time/s | |||||||
| YOLOv5 | 0.017 | 0.011 | 0.005 | 0.006 | 0.005 | 0.006 | 0.005 |
| YOLOv7 | 0.007 | 0.007 | 0.010 | 0.008 | 0.007 | 0.008 | 0.008 |
| BPN-YOLO | 0.005 | 0.007 | 0.006 | 0.006 | 0.007 | 0.006 | 0.007 |
| Methods | mAP | AP | ||||||
|---|---|---|---|---|---|---|---|---|
| Live_Knot | Marrow | Resin | Dead_Knot | Knot_with_Crack | Knot_Missing | Crack | ||
| Faster R-CNN | 0.606 | 0.611 | 0.866 | 0.571 | 0.673 | 0.547 | 0.359 | 0.618 |
| RT-DETR | 0.683 | 0.787 | 0.728 | 0.671 | 0.757 | 0.487 | 0.787 | 0.566 |
| YOLOv5 | 0.700 | 0.807 | 0.845 | 0.754 | 0.813 | 0.320 | 0.600 | 0.761 |
| YOLOv7 | 0.744 | 0.827 | 0.766 | 0.715 | 0.830 | 0.560 | 0.816 | 0.692 |
| YOLOv8 | 0.765 | 0.825 | 0.863 | 0.757 | 0.836 | 0.596 | 0.782 | 0.695 |
| YOLOv9 | 0.750 | 0.817 | 0.747 | 0.763 | 0.854 | 0.569 | 0.838 | 0.660 |
| BPN-YOLO | 0.818 | 0.844 | 0.857 | 0.812 | 0.839 | 0.654 | 0.922 | 0.797 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Chen, Y.; Liang, F.; Wang, B.; Mou, X.; Zhang, G. BPN-YOLO: A Novel Method for Wood Defect Detection Based on YOLOv7. Forests 2024, 15, 1096. https://doi.org/10.3390/f15071096
Wang R, Chen Y, Liang F, Wang B, Mou X, Zhang G. BPN-YOLO: A Novel Method for Wood Defect Detection Based on YOLOv7. Forests. 2024; 15(7):1096. https://doi.org/10.3390/f15071096
Chicago/Turabian StyleWang, Rijun, Yesheng Chen, Fulong Liang, Bo Wang, Xiangwei Mou, and Guanghao Zhang. 2024. "BPN-YOLO: A Novel Method for Wood Defect Detection Based on YOLOv7" Forests 15, no. 7: 1096. https://doi.org/10.3390/f15071096
APA StyleWang, R., Chen, Y., Liang, F., Wang, B., Mou, X., & Zhang, G. (2024). BPN-YOLO: A Novel Method for Wood Defect Detection Based on YOLOv7. Forests, 15(7), 1096. https://doi.org/10.3390/f15071096