
A Direction-Adaptive DBSCAN-Based Method for Denoising ICESat-2 Photon Point Clouds in Forested Environments

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Study Data
2.2.1. ICESat-2/ATLAS Data
2.2.2. Validation Data
3. Research Methodology
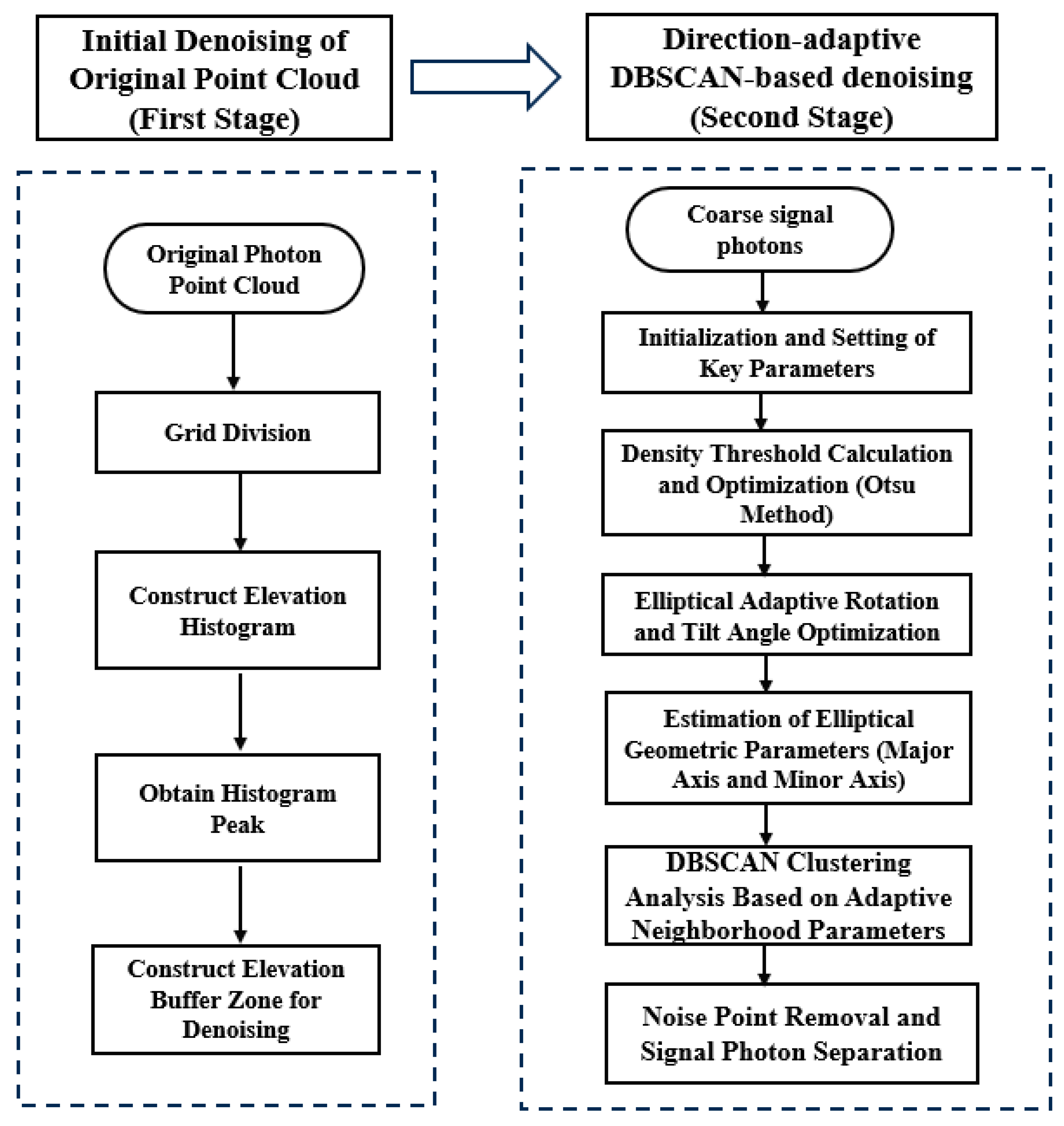
3.1. Primary Coarse Denoising Based on Histograms of Elevation Statistics
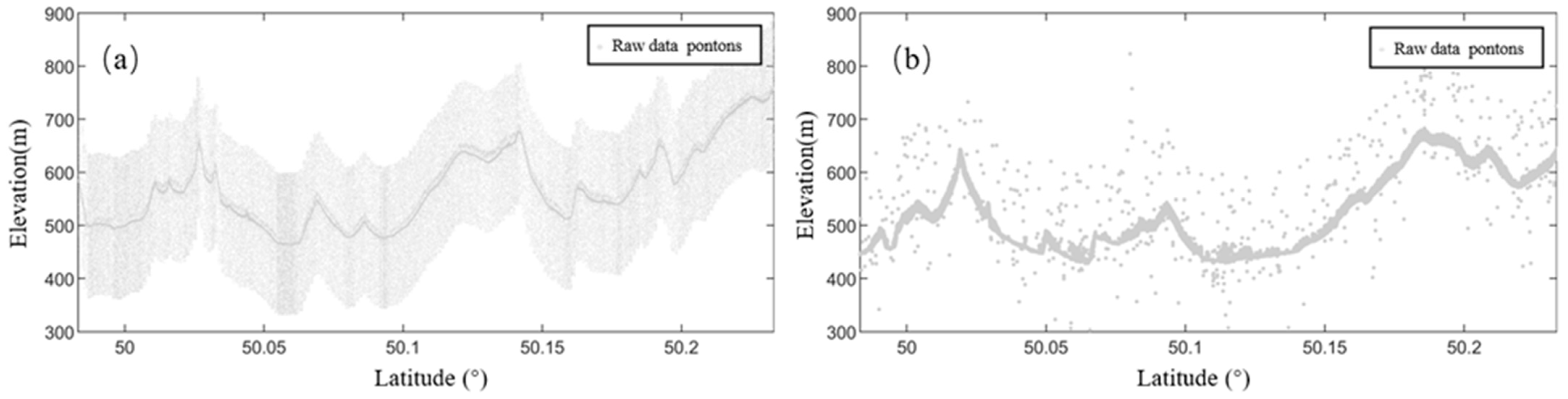
- Grid Division: The photon point cloud strip is partitioned into grids along the track distance direction, with the grid spacing set to along_track_bin = 300 m. This grid size has been validated through numerous experiments, demonstrating its effectiveness in reducing computational workload and processing time, while maintaining accuracy. The photon point cloud data within each grid is processed independently, thereby reducing computational complexity and ensuring adaptability to varying photon point cloud densities. Figure 5 presents the profile of the original photon point cloud, showing the distribution of signal and noise photons along track distance and elevation, providing the data foundation for the subsequent denoising process.
- Construct Elevation Statistics Histograms: Within each grid window, elevation statistics are calculated, and elevation histograms are generated. The grid spacing in the elevation direction is set to 100 m (i.e., each 100-m interval forms a data bin). This setting aids in clustering signal photon points while effectively distinguishing noise photons, ensuring high-resolution statistics. The elevation data H = {H1, H2, …, Hn} represent the elevation of each photon point.To construct the elevation histogram, the number of photon points n(H) in each elevation interval is counted, and the frequency P(H) of each interval is computed using the following formula:where N represents the total number of photon points, and n(H) denotes the number of photon points within the elevation interval H.
- Gaussian Filter Peak Detection: A Gaussian filter is applied to the histogram of elevation statistics for each grid to identify the peak position. Since the signal photon points are typically densely clustered and exhibit a high frequency, the peak position can be considered as the central location of the signal photons. The Gaussian function is expressed as follows:where x represents the deviation of the elevation statistics, and σ denotes the standard deviation. The filtered peak position corresponds to the central elevation of the signal photons.
- Elevation Threshold Setting and Buffer Construction: Based on the peak position Hcenter of the elevation statistics histogram, an elevation threshold, denoted as elevationthreshold, is set, and an elevation buffer is constructed. This threshold is used to determine whether the elevation of a photon point lies within the range of signal photons. In this step, the buffer width is set to ±30 m, meaning that if the difference between the elevation H(i) of a photon point and the central elevation Hcenter of the signal photons is less than or equal to the threshold, the point is classified as a signal photon; otherwise, it is classified as a noise photon. The formula is as follows:where H(i) denotes the elevation of the i-th photon point, Hcenter represents the center elevation of the signal photon, and elevationthreshold is the set elevation threshold.
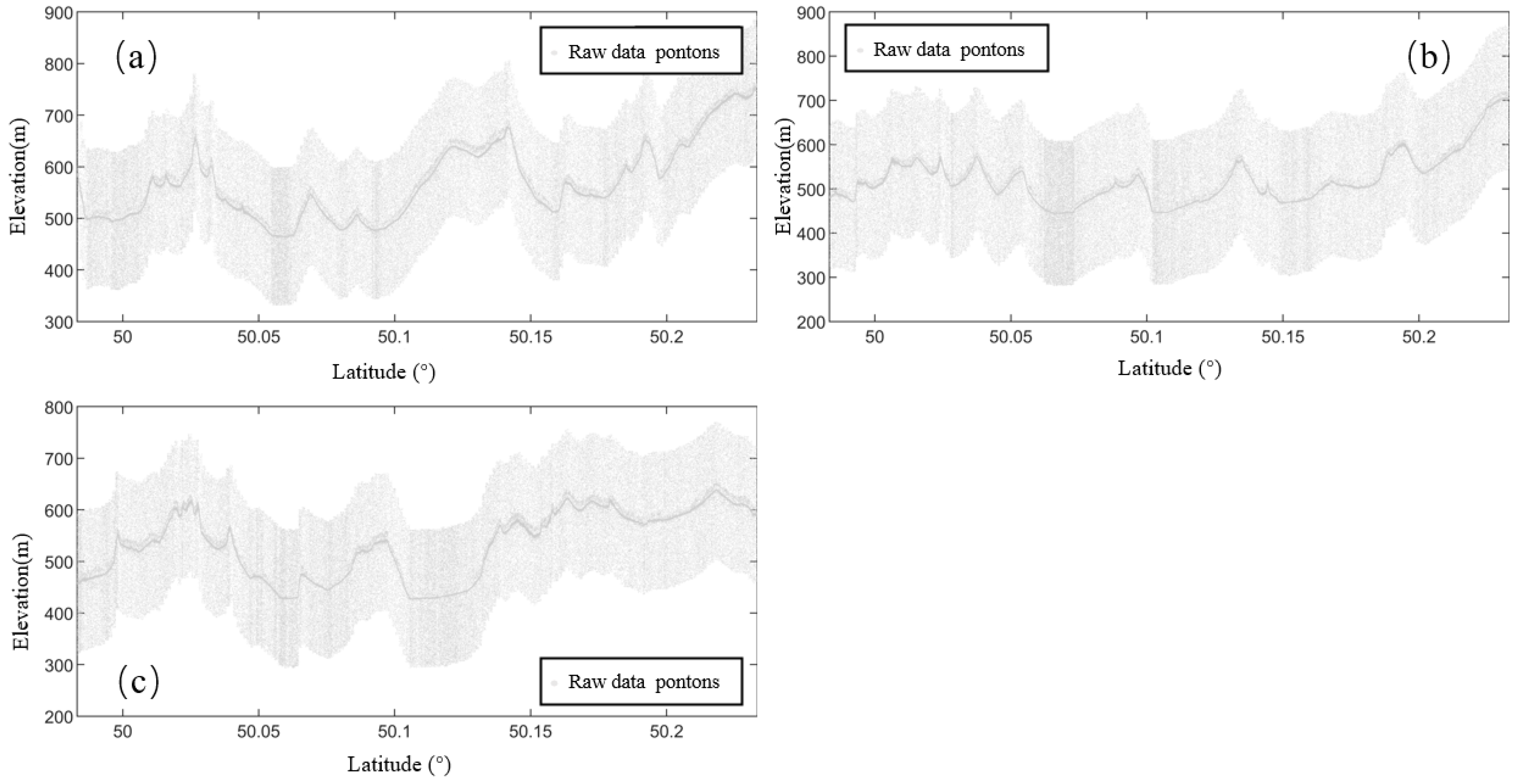
- Coarse Denoising Processing: Based on the previously defined elevation threshold, photon points that do not meet the specified conditions are eliminated and classified as noise points. After the elimination process, the remaining photon points are identified as signal photons, which provide reliable data for the subsequent fine-denoising step.As illustrated in Figure 6, the coarse denoising of the original photon point cloud data, performed using the elevation statistics histogram, successfully distinguishes signal points from noise points, thereby significantly improving the denoising results.
3.2. Direction-Adaptive DBSCAN-Based Quadratic Fine Denoising
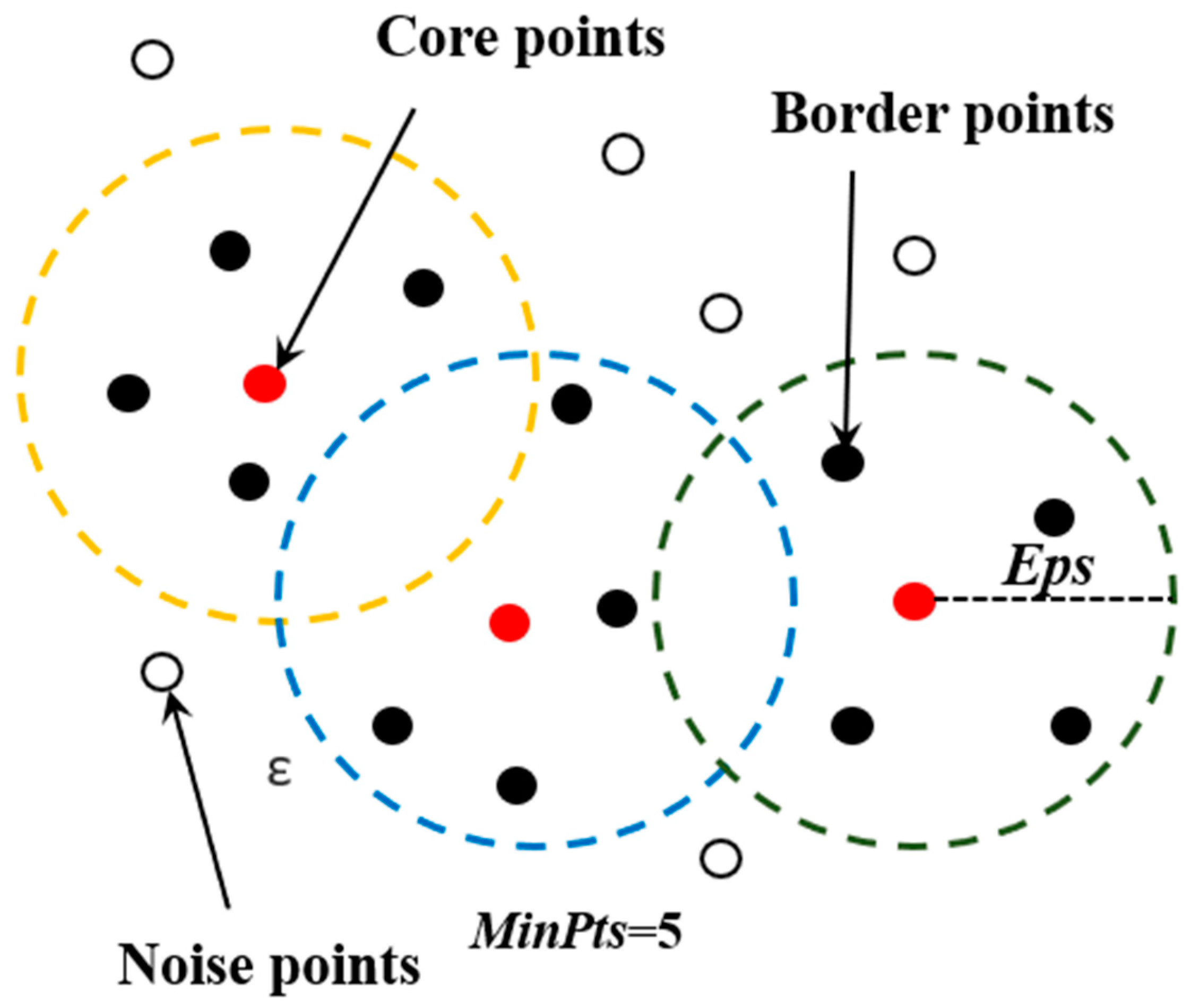
3.2.1. Principles of the DBSCAN Algorithm
3.2.2. Direction-Adaptive DBSCAN-Based Denoising Algorithm
- Parameter Initialization and Adaptive Selection: The initialization of neighborhood radius parameters, specifically the long-axis radius εlong and the short-axis radius εshort, is a crucial step in the direction-adaptive DBSCAN algorithm. Given the limited existing literature on this specific methodology for photon point cloud data, we rely on preliminary experiments and empirical observations to determine their initial values.Before the adaptive adjustment process, we conducted a series of experiments by testing a wide range of values to comprehensively assess the algorithm’s performance under various settings. Specifically, the long-axis radius was varied between 0.01 to 0.1 times the spatial extent of the point cloud. This range was chosen because a too small value may lead to excessive fragmentation of clusters, while a too large value may cause distinct clusters to be merged. The short-axis radius was set as a proportion (0.2–0.8) of the long-axis radius. This allows exploration of different neighborhood definitions and their effects on clustering. Typically, the long-axis radius is set to 0.05 times the spatial extent, and the short-axis radius is set to 0.5 times the long-axis radius, which serve as the initial values based on empirical data and the point cloud’s density characteristics. These values strike a balance between over-clustering and under-clustering, ensuring that the algorithm can effectively capture the local density variations in the point cloud.The minimum number of points (MinPts) is determined using the Otsu method, which adjusts based on the density distribution of the point cloud. As shown in Figure 9, experiments reveal that setting MinPts to a small value (e.g., 2 or 3) results in over-clustering, where points with low local density are misclassified as core points, leading to fragmented clusters (Figure 9a). Conversely, setting MinPts to a high value (e.g., greater than 12) results in under-clustering, where many moderate-density clusters are missed and many points are incorrectly labeled as noise (Figure 9b). Table 3 summarizes the effects of different Eps and MinPts values on the denoising results.The Otsu method fine-tunes the MinPts parameter to ensure accurate identification of core points, especially in regions with varying point densities. The calculation formula for MinPts is as follows:where P(i) represents the weight of point i, which can be calculated as the inverse of the distance from point i to its k-nearest neighbors (k is usually set to 5 in our experiments). This weight reflects the local importance of the point in the density distribution. C1(i) and C2(i) denote the intra-class variances of the two classes in the density distribution, and t is the threshold for the maximum inter-class variance.
- Adaptive computation of the elliptical tilt angle; To enhance the ability of DBSCAN clustering to adapt to the local density variation of the point cloud, it is necessary to compute the optimal elliptical tilt angle θoptimal. This process involves rotating the point cloud dataset at multiple angles and selecting the angle that results in the highest point cloud density after rotation as the optimal tilt angle. The rotation is performed using the rotation matrix R(θ):where p represents the coordinates of the original point cloud and p′ represents the coordinates of the rotated point cloud. The density of the rotated point cloud is evaluated by testing multiple angles θ, with the angle θoptimal that maximizes the density selected as the optimal tilt angle.
- Long-Axis and Short-Axis Radius Calculation: After rotating the point cloud using the optimal tilt angle θoptimal, the long-axis radius of the ellipse, εlong, and the short-axis radius, εshort, are computed based on the distribution of the rotated point cloud. These radii serve as neighborhood parameters for the DBSCAN clustering algorithm, enhancing the accuracy of the clustering by considering the local density characteristics of the point cloud.The long and short axes are calculated as follows:
- DBSCAN Clustering Based on Adaptive Neighborhood Parameters: Using the adaptively selected long-axis radius εlong and short-axis radius εshort, DBSCAN clustering is applied to the point cloud data. During the clustering process, for each point pi, the number of points within its neighborhood Nϵ(pi) is calculated, and the point is classified as a core point based on the density threshold MinPts. If the number of points within the neighborhood of the point is greater than or equal to MinPts, the point is designated as a core point and assigned to the same cluster; otherwise, the point is labeled as a noise point.The core point determination formula is as follows:Here, CorePoint(pi) = 1 indicates that point pi is classified as a core point, representing a signal photon, while CorePoint(pi) = 0 signifies a noise point. This classification forms the basis for subsequent denoising and signal extraction steps.
- Noise Point Rejection and Signal Photon Extraction: Based on the DBSCAN clustering results, all points identified as noise are discarded, while core points (signal photon points) are retained. The remaining signal photon points constitute the final fine denoising outcome, offering high-quality point cloud data for subsequent analysis.The criterion for noise point rejection is as follows:Here, CorePoint(pi) = 1 represents a core point classified as a signal photon, while CorePoint(pi) = 0 indicates a noise point. This classification ensures that only high-confidence signal photons are preserved for further analysis.
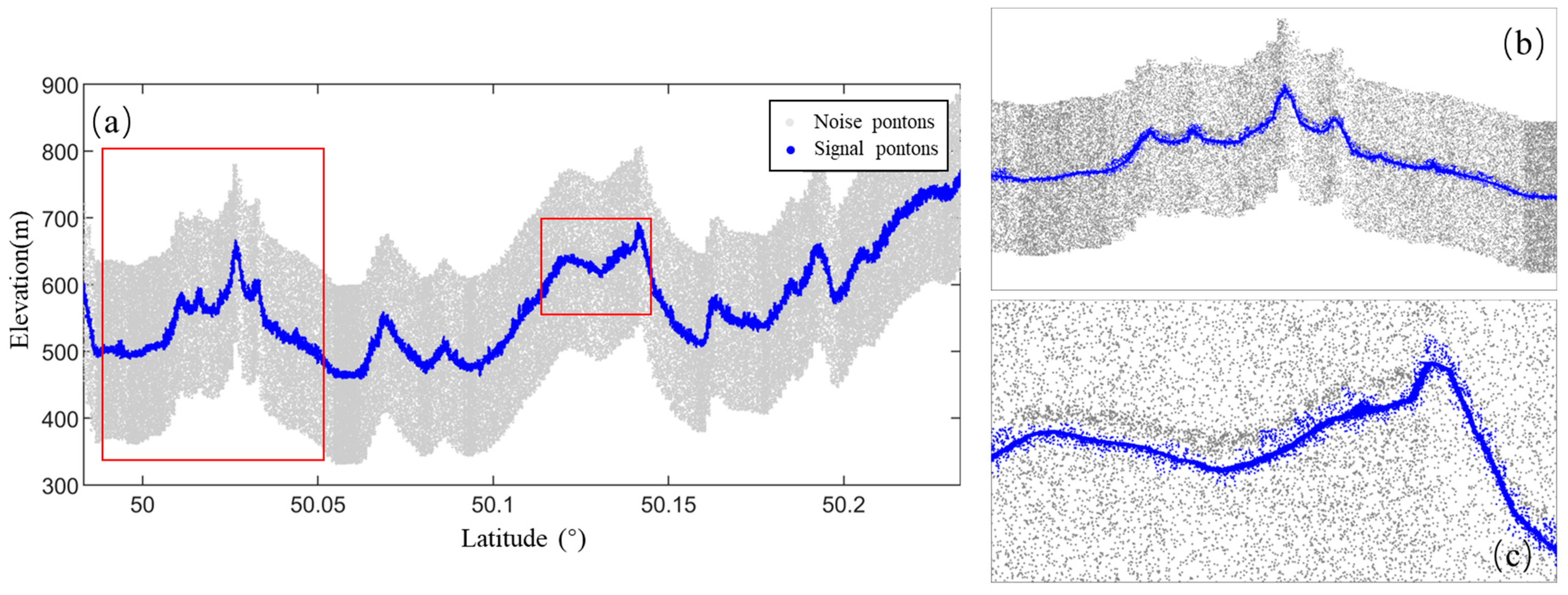
- Fine Denoising Results: Following the direction-based adaptive DBSCAN clustering process, the distinction between signal photons and noise points is considerably enhanced. In comparison with the coarse denoising results, the denoising accuracy has been significantly improved. The noise points are effectively eliminated, and the signal photons are more precisely extracted. Figure 10 illustrates the point cloud data after the fine denoising process, where the noise points have been removed, the signal photon points are more concentrated, and the denoising effect is markedly improved.
3.3. Precision Evaluation
4. Results
4.1. Qualitative Evaluation
4.1.1. Comparative Analysis of One-Time Coarse Denoising Results Based on Elevation Statistics Histograms
4.1.2. Comparative Analysis of the Results of DBSCAN Denoising Algorithm Based on Directional Adaptive
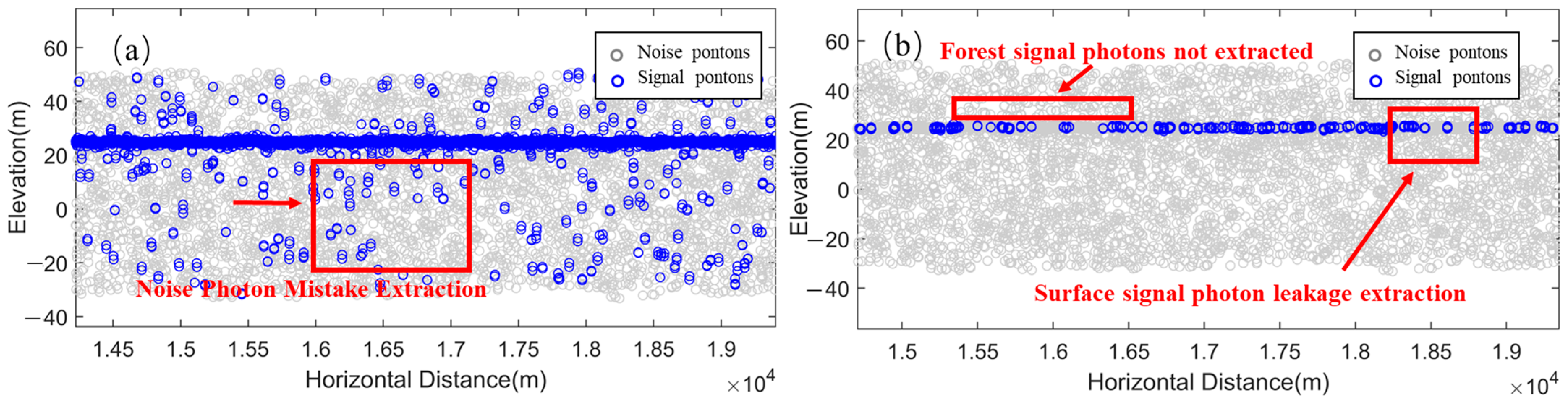
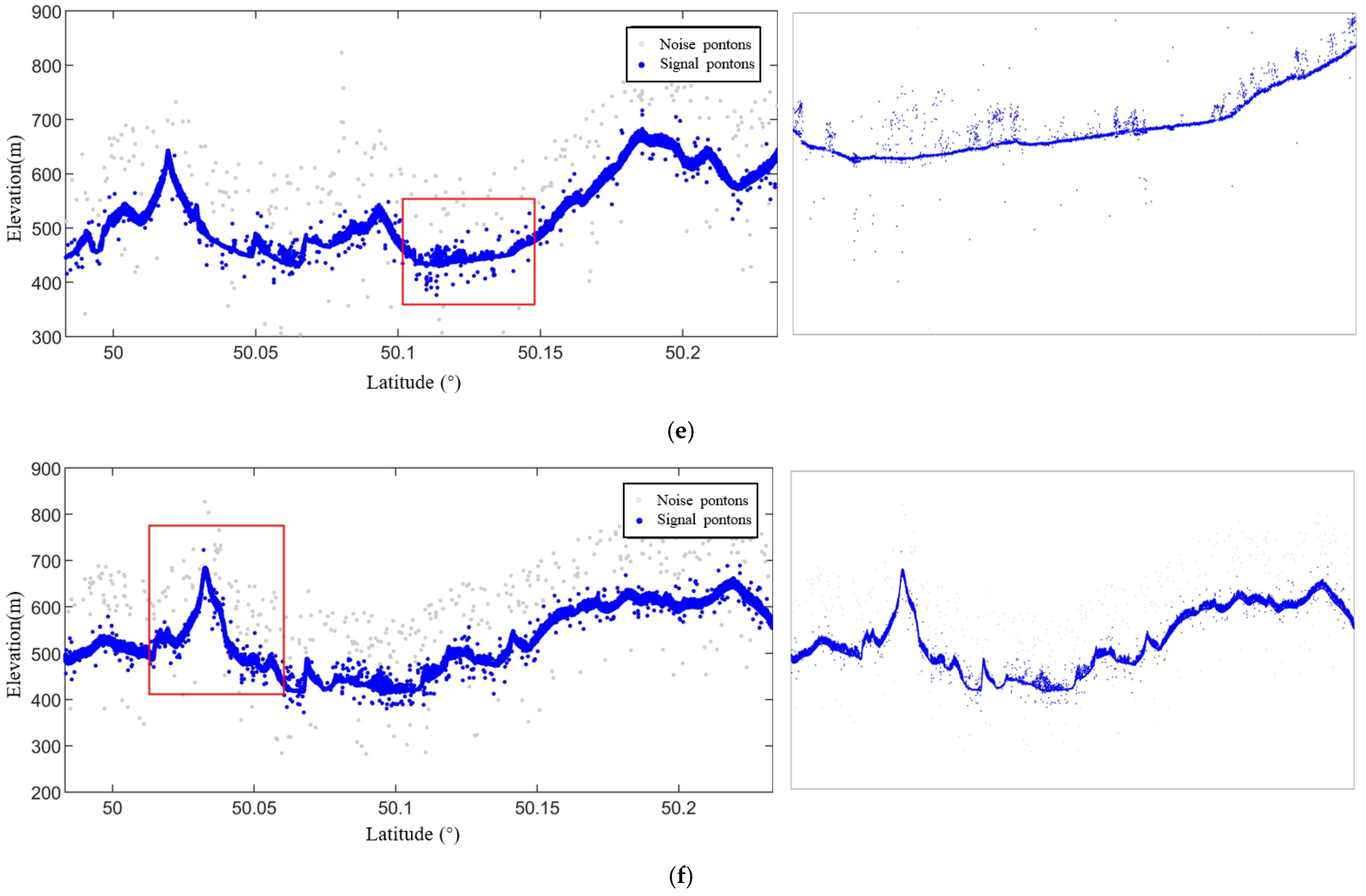
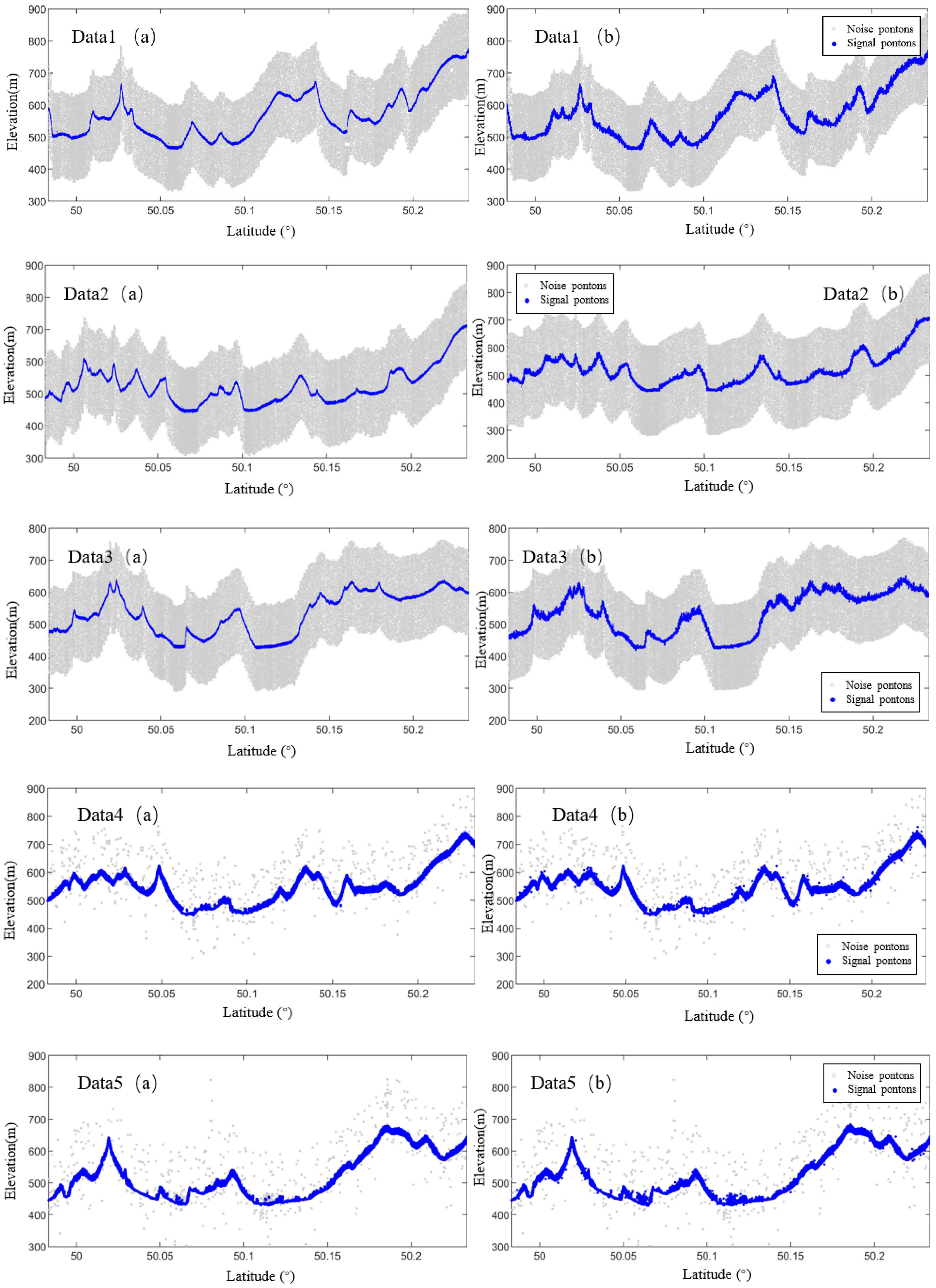
- Effectiveness of noise photon removal: In terms of the effectiveness of noise photon removal, the direction-adaptive DBSCAN algorithm proposed in this study is significantly better than the ATL08 algorithm. The reason is that the direction-adaptive DBSCAN algorithm is a density-based clustering algorithm that identifies noise and signal points by analyzing the density distribution of the photon point cloud. Specifically, the direction-adaptive DBSCAN algorithm can determine which points belong to noise and which points are signal photons based on the local density variation of the point cloud. In the case of high background noise rate (e.g., Data 1, Data 2, Data 3), the noise photons tend to have similar spatial distributions with the signal photons, and the traditional denoising method of the ATL08 algorithm based on a fixed threshold may lead to some signal photons being misjudged as noise points. In contrast, the direction-adaptive DBSCAN algorithm does not rely on preset thresholds, but dynamically denoises according to the density distribution of the data, which can more accurately identify the noise photons and avoid mistakenly deleting signal points. Therefore, the direction-adaptive DBSCAN algorithm can effectively remove a large number of noise photons in a high-noise background while maintaining the integrity of signal photons.
- Ability of signal photon retention: the ability of signal photon retention is an important index for evaluating the merits of denoising algorithms. Under the condition of high background noise, traditional denoising methods (e.g., ATL08 algorithm) often face the problem of balancing between denoising accuracy and signal retention. When the boundary between noise photons and signal photons is not obvious, the fixed-threshold method may lead to the erroneous deletion of some signal photons. In contrast, the direction-adaptive DBSCAN algorithm, by dynamically adjusting the local density of the point cloud, can differentiate between noise and signal based on the dense distribution of signal photons, and thus it can effectively retain most of the signal photons and remove those low-density noise photons in a high-noise environment. Taking Data 1 (high background count rate) as an example, under the traditional denoising method, noise photons, and signal photons are mixed, and the denoising process may over-reject the phenomenon, resulting in some signal photons being mistakenly deleted. In contrast, after using the direction-adaptive DBSCAN algorithm, signal photons are effectively retained due to their higher local density, while noise photons are successfully removed utilizing low density. Therefore, the direction-adaptive DBSCAN algorithm significantly outperforms the traditional denoising methods in terms of signal photon retention.
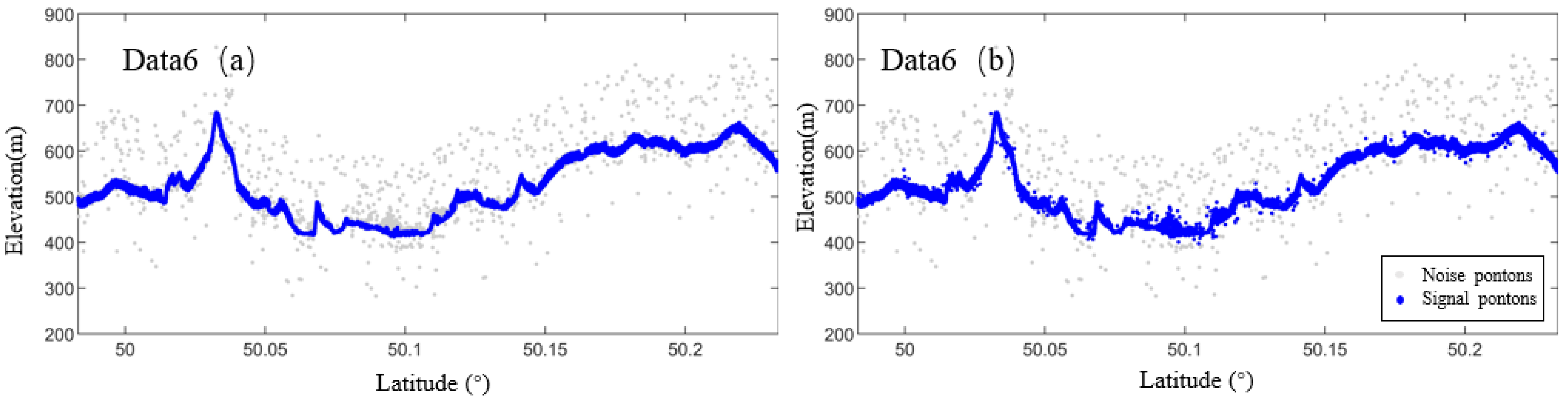
- Adaptability and robustness of the algorithm: traditional denoising algorithms may not be effective in denoising under different noise backgrounds because the algorithm parameters are not adapted to the specific dataset. For example, the ATL08 algorithm removes noise by setting a fixed threshold, but this method may be over- or under-denoising when the noise background is complex or highly variable. On the contrary, the direction-adaptive DBSCAN algorithm has strong adaptability and robustness. It can automatically adjust the denoising parameters according to the characteristics of different datasets, thus adapting to different noise backgrounds. For example, under high noise backgrounds (e.g., Data 1, Data 2, Data 3), the direction-adaptive DBSCAN algorithm can effectively identify signal photons through high-density regions while, under low noise backgrounds (e.g., Data 4, Data 5, Data 6), the algorithm avoids mistakenly deleting a small number of signal photons by flexibly adjusting the density threshold, thus maintaining a high denoising accuracy.In addition, the direction-adaptive DBSCAN algorithm performs particularly well in the case of high terrain complexity. Since the algorithm can recognize the structure of the photon point cloud based on the local density changes, it can effectively recognize the noise photons in complex terrain regions (such as mountains, hills, and other regions with large terrain changes) and avoid the misrecognition problem caused by terrain changes. Therefore, the robustness of the direction-adaptive DBSCAN algorithm under different terrain conditions is also better than traditional denoising algorithms such as ATL08.
- Computational efficiency of the algorithm: in terms of the computational efficiency of the algorithm, the direction-adaptive DBSCAN algorithm is not only able to improve the denoising effect but is also able to effectively reduce the amount of computation through the setting of adaptive density parameters. Compared with the fixed threshold method, the direction-adaptive DBSCAN algorithm does not need to set a static judgment threshold for each point in the calculation, but dynamically clusters and denoises according to the data density. This makes the algorithm have better computational efficiency when dealing with large-scale photonic point cloud data. In the experiments of this paper, the direction-adaptive DBSCAN-based denoising algorithm can achieve high denoising accuracy while reducing the computational volume, which is especially suitable for real-time processing of large-scale photonic point cloud data.
4.2. Quantitative Evaluation
- (1)
- Analysis of the Denoising Effect under High Background Photon Counting Rate

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Metric | Datasets (High Background Photon Counting Rate) | ||
|---|---|---|---|---|
| Data 1 | Data 2 | Data 3 | ||
| DBSCAN | P | 0.81023 | 0.82178 | 0.81802 |
| R | 0.81546 | 0.82962 | 0.82815 | |
| Accuracy | 0.86021 | 0.86547 | 0.87204 | |
| F | 0.81283 | 0.82569 | 0.82208 | |
| ATL08 | P | 0.84319 | 0.85930 | 0.85567 |
| R | 0.85126 | 0.86752 | 0.86348 | |
| Accuracy | 0.89237 | 0.90084 | 0.91011 | |
| F | 0.84702 | 0.86339 | 0.85957 | |
| Direction-adaptive DBSCAN | P | 0.887346 | 0.892623 | 0.890873 |
| R | 0.893214 | 0.895704 | 0.89874 | |
| Accuracy | 0.925717 | 0.923729 | 0.98089 | |
| F | 0.89027 | 0.894161 | 0.894789 | |
| Algorithm | Metric | High Background Photon Count Rate (95% CI) |
|---|---|---|
| DBSCAN | P | (0.8020, 0.8313) |
| DBSCAN | R | (0.8051, 0.8438) |
| ATL08 | P | (0.8317, 0.8737) |
| ATL08 | R | (0.8397, 0.8818) |
| Direction-Adaptive DBSCAN | P | (0.8836, 0.8970) |
| Direction-Adaptive DBSCAN | R | (0.8890, 0.9028) |
| Metric | Direction-Adaptive DBSCAN vs. DBSCAN (t-Value) | Direction-Adaptive DBSCAN vs. DBSCAN (p-Value) | Direction-Adaptive DBSCAN vs. ATL08 (t-Value) | Direction-Adaptive DBSCAN vs. ATL08 (p-Value) |
|---|---|---|---|---|
| P | 19.6882 | 0.0000 *** | 7.3365 | 0.0018 *** |
| R | 14.9826 | 0.0001 *** | 6.8320 | 0.0024 ** |
| Accuracy | 4.0722 | 0.0152 * | 2.1803 | 0.0947 |
| F | 17.8523 | 0.0001 *** | 7.0808 | 0.0021 *** |
- (2)
- Analysis of the Denoising Effect under Low Background Photon Counting Rate
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schimel, D.; Pavlick, R.; Fisher, J.B.; Asner, G.P.; Saatchi, S.; Townsend, P.; Miller, C.; Frankenberg, C.; Hibbard, K.; Cox, P. Observing terrestrial ecosystems and the carbon cycle from space. Glob. Change Biol. 2015, 21, 1762–1776. [Google Scholar] [CrossRef] [PubMed]
- Radtke, P.; Walker, D.; Frank, J.; Weiskittel, A.; DeYoung, C.; MacFarlane, D.; Domke, G.; Woodall, C.; Coulston, J.; Westfall, J. Improved accuracy of aboveground biomass and carbon estimates for live trees in forests of the eastern United States. For. Int. J. For. Res. 2017, 90, 32–46. [Google Scholar] [CrossRef]
- Nelson, R.; Valenti, M.A.; Short, A.; Keller, C. A Multiple Resource Inventory of Delaware Using Airborne Laser Data. BioScience 2003, 53, 981–992. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Luo, H.; Yue, C.; Yuan, H.; Chen, S. Improving Forest Canopy Height Estimation Using a Semi-Empirical Approach to Overcome TomoSAR Phase Errors. Forests 2023, 14, 1479. [Google Scholar] [CrossRef]
- Magruder, L.A.; Wharton, M.E., III; Stout, K.D.; Neuenschwander, A.L. Noise filtering techniques for photon-counting LADAR data. In Proceedings of the SPIE—The International Society for Optical Engineering, Baltimore, MD, USA, 23–27 April 2012; Volume 8379, p. 24. [Google Scholar]
- Zhu, X.; Wang, C.; Xi, X.; Nie, S.; Yang, X.; Li, D. Research progress on data processing and application of ICESat-2 on-board photon counting lidar. Infrared Laser Eng. 2020, 49, 76–85. [Google Scholar]
- Wang, M.; Wei, Y.; Yang, B.; Zhou, X. ICESat-2/ATLAS global elevation control point extraction and analysis. J. Wuhan Univ. (Inf. Sci. Ed.) 2021, 46, 184–192. [Google Scholar]
- Xia, S.B.; Wang, C.; Xi, X.H. ICESat-2 airborne test point cloud filtering and vegetation height inversion. J. Remote Sens. 2014, 18, 1199–1207. [Google Scholar]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Hu, Z. A Ground Elevation and Vegetation Height Retrieval Algorithm Using Micro-Pulse Photon-Counting Lidar Data. Remote Sens. 2018, 10, 1962. [Google Scholar] [CrossRef]
- Gwenzi, D.; Lefsky, M.A.; Suchdeo, V.P.; Harding, D.J. Prospects of the ICESat-2 laser altimetry mission for savanna ecosystem structural studies based on airborne simulation data. ISPRS J. Photogramm. Remote Sens. 2016, 118, 68–82. [Google Scholar] [CrossRef]
- Moussavi, M.S.; Abdalati, W.; Scambos, T.; Neuenschwander, A. Applicability of an automatic surface detection approach to micro-pulse photon-counting lidar altimetry data: Implications for canopy height retrieval from future ICESat-2 data. Int. J. Remote Sens. 2014, 35, 5263–5279. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J.; Csatho, B.; Schenk, T.; Wheelwright, R. A clustering approach for detection of ground in micropulse photon-counting LiDAR altimeter data. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Chen, B.; Pang, Y.; Li, Z.; Lu, H.; North, P.; Rosette, J.; Yan, M. Forest signal detection for photon counting LiDAR using Random Forest. Remote Sens. Lett. 2020, 11, 37–46. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, X.; Zhang, Y.; Chen, F.; Dang, S.; Sun, T. A Density-Based Multilevel Terrain-Adaptive Noise Removal Method for ICESat-2 Photon-Counting Data. Sensors 2023, 23, 9742. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Li, G.; Zhou, X.; Yao, J.; Guo, J.; Tang, X. A single-photon point cloud denoising algorithm based on multi-feature adaptation. Infrared Laser Eng. 2022, 51, 32–42. [Google Scholar]
- Liu, J.; Liu, J.; Xie, H.; Ye, D.; Li, P. A Multi-Level Auto-Adaptive Noise-Filtering Algorithm for Land ICESat-2 Photon-Counting Data. Remote Sens. 2023, 15, 5176. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Pitts, K. The ATL08 land and vegetation product for the ICESat-2 Mission. Remote Sens. Environ. 2019, 221, 247–259. [Google Scholar] [CrossRef]
- He, L.; Pang, Y.; Zhang, Z.; Liang, X.; Chen, B. ICESat-2 data classification and estimation of terrain height and canopy height. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103233. [Google Scholar] [CrossRef]
- Kong, D.; Pang, Y. ICESat-2 data denoising and forest canopy height estimation using Machine Learning. Int. J. Appl. Earth Obs. Geoinf. 2024, 135, 104263. [Google Scholar] [CrossRef]
- Wang, R.; Lu, Y.; Lu, D.; Li, G. Improving extraction of forest canopy height through reprocessing ICESat-2 ATLAS and GEDI data in sparsely forested plain regions. GISci. Remote Sens. 2024, 61, 2396807. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Shang, R.; Qin, Y.; Wang, L.; Chen, H. High-resolution mapping of forest canopy height using machine learning by coupling ICESat-2 LiDAR with Sentinel-1, Sentinel-2 and Landsat-8 data. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102163. [Google Scholar] [CrossRef]
- Narine, L.L.; Popescu, S.C.; Malambo, L. A Methodological Framework for Mapping Canopy Cover Using ICESat-2 in the Southern USA. Remote Sens. 2023, 15, 1548. [Google Scholar] [CrossRef]
- Narine, L.L.; Popescu, C.S.; Malambo, L. Using ICESat-2 to Estimate and Map Forest Aboveground Biomass: A First Example. Remote Sens. 2020, 12, 1824. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Guenther, E.; White, J.C.; Duncanson, L.; Montesano, P. Validation of ICESat-2 terrain and canopy heights in boreal forests. Remote Sens. Environ. 2020, 251, 112110. [Google Scholar] [CrossRef]
- Lonesome, M.; Sorin, P. PhotonLabeler: An Inter-Disciplinary Platform for Visual Interpretation and Labeling of ICESat-2 Geolocated Photon Data. Remote Sens. 2020, 12, 3168. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the National Conferences on Aritificial Intelligence, Orlando, FL, USA, 18–22 July1999. [Google Scholar]
- Cao, B.; Fang, Y.; Gao, L.; Hu, H.; Jiang, Z.; Sun, B.; Lou, L. An active-passive fusion strategy and accuracy evaluation for shallow water bathymetry based on ICESat-2 ATLAS laser point cloud and satellite remote sensing imagery. Int. J. Remote Sens. 2021, 42, 2783–2806. [Google Scholar] [CrossRef]
- Pan, J.; Gao, F.; Wang, J.; Zhang, J.; Liu, Q.; Deng, Y. A main direction-based noise removal algorithm for ICESat-2 photon-counting LiDAR data. J. Geod. 2024, 98, 80. [Google Scholar] [CrossRef]
- Yang, P.; Fu, H.; Zhu, J.; Li, Y.; Wang, C. An Elliptical Distance Based Photon Point Cloud Filtering Method in Forest Area. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6504705. [Google Scholar] [CrossRef]
- Tang, J.; Xing, Y.; Wang, J.; Yang, H.; Wang, D.; Li, Y.; Zhang, A. A Multilevel Autoadaptive Denoising Algorithm Based on Forested Terrain Slope for ICESat-2 Photon-Counting Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 16831–16846. [Google Scholar] [CrossRef]







| Method Category | Key Approach | Advantages | Limitations |
|---|---|---|---|
| Local Distance Statistical Parameter Processing | Adaptive density-based clustering with shape-modified search region | Adapts to diverse landforms; improved denoising performance | Poor performance under high noise and low signal-to-noise ratios |
| Density-Based Spatial Clustering | Multilevel Adaptive Filtering (MLANF) with enhanced DBSCAN | Accurate extraction across diverse land types; robust denoising | Increased computational complexity; sensitive to parameter tuning |
| Multi-Feature Adaptation | Parallelogram filter kernels with slope-based feature adaptation | Superior performance in steep slopes and inconsistent noise | Reduced efficiency for large-scale datasets |
| Raster Image-Based Processing | Rasterization of photon point clouds | Simple implementation | Poor accuracy due to point cloud rasterization |
| Official NASA ATL08 Algorithm | DRAGANN algorithm with differential and adaptive filtering | Efficient batch processing of large datasets | Ignores neighboring point cloud continuity |
| Date | Strip | Data Number | Data Acquisition Time | Photon Background Count Rate |
|---|---|---|---|---|
| 7 March 2023 | GT1L | Data 1 | Daytime | High |
| GT2L | Data 2 | Daytime | High | |
| GT3L | Data 3 | Daytime | High | |
| 6 August 2023 | GT1L | Data 4 | Nighttime | Low |
| GT2L | Data 5 | Nighttime | Low | |
| GT3L | Data 6 | Nighttime | Low |
| Eps | MinPts | Denoising Effect Description | Impact |
|---|---|---|---|
| 0.001–0.05 | 2 | Over-clustering with many low-density points misclassified as core points, increasing noise | Excessive fragmentation, many points misclassified as noise, leading to fragmentation |
| 0.05–0.1 | 3 | Over-clustering, with some points wrongly marked as core points, leading to split clusters | Over-splitting of clusters, increased noise points, poor denoising effect |
| 0.05–0.1 | 4 | Proper clustering with good denoising performance, recognizing most clusters | Balanced clustering, fewer noise points, better denoising |
| 0.05–0.1 | 6 | Stable clustering, well-preserved cluster structure, optimal denoising | Best denoising effect, effectively removing noise in moderate density point clouds |
| 0.1–0.3 | 6 | Larger clustering range, some small clusters may be missed, but noise decreases | Larger clustering range, may miss small clusters but generally good denoising |
| 0.1–0.3 | 8 | Looser clustering, larger Eps value may merge different clusters, leading to decreased accuracy | Over-merging of clusters, poor denoising effect, smaller clusters missed |
| 0.3–0.5 | 8 | Suitable for low-density point clouds, noise decreases, but medium-density clusters may be missed | Effective for low-density point clouds, noise reduction, but medium-density clusters may be lost |
| 0.3–0.5 | 12 | Over-loose clustering, many medium-density clusters missed, noise points increase | Poor denoising effect, clusters missed, leading to increased noise |
| Aspect | Direction-Adaptive DBSCAN | ATL08 Algorithms |
|---|---|---|
| Noise Photon Removal | Efficient removal of noise by analyzing local density | Fixed-threshold method may misclassify signal photons as noise |
| Signal Photon Retention | Effectively retains signal photons, adjusts threshold dynamically | Struggles to balance between denoising accuracy and signal retention |
| Adaptability | Highly adaptable to different noise environments and terrains | Fixed parameters; less effective in varying conditions |
| Robustness in Complex Terrain | Effective in complex terrains due to density-based clustering | Less effective in varying terrains due to reliance on fixed thresholds |
| Computational Efficiency | More efficient with large-scale data due to adaptive thresholds | May require more computation due to static thresholding |
| Algorithm | Metric | Datasets (Low Background Photon Counting Rate) | ||
|---|---|---|---|---|
| Data 4 | Data 5 | Data 6 | ||
| DBSCAN | P | 0.94234 | 0.92856 | 0.92918 |
| R | 0.94018 | 0.93785 | 0.93584 | |
| Accuracy | 0.95376 | 0.92832 | 0.93221 | |
| F | 0.94126 | 0.93319 | 0.93251 | |
| ATL08 | P | 0.97145 | 0.96034 | 0.96142 |
| R | 0.97402 | 0.96892 | 0.96956 | |
| Accuracy | 0.97363 | 0.94631 | 0.95411 | |
| F | 0.97223 | 0.96458 | 0.96547 | |
| Direction-adaptive DBSCAN | P | 0.997723 | 0.996472 | 0.996638 |
| R | 0.99814 | 0.998157 | 0.998166 | |
| Accuracy | 0.99591 | 0.981964 | 0.994879 | |
| F | 0.997932 | 0.997314 | 0.997401 | |
| Algorithm | Metric | Low Background Photon Count Rate (95% CI) |
|---|---|---|
| DBSCAN | P | (0.9140, 0.9527) |
| DBSCAN | R | (0.9326, 0.9434) |
| ATL08 | P | (0.9492, 0.9796) |
| ATL08 | R | (0.9639, 0.9777) |
| Direction-Adaptive DBSCAN | P | (0.9953, 0.9986) |
| Direction-Adaptive DBSCAN | R | (0.9981, 0.9982) |
| Metric | Direction-Adaptive DBSCAN vs. DBSCAN (t-Value) | Direction-Adaptive DBSCAN vs. DBSCAN (p-Value) | Direction-Adaptive DBSCAN vs. ATL08 (t-Value) | Direction-Adaptive DBSCAN vs. ATL08 (p-Value) |
|---|---|---|---|---|
| P | 14.0965 | 0.0001 *** | 9.1438 | 0.0008 *** |
| R | 48.0042 | 0.0000 *** | 17.0328 | 0.0001 *** |
| Accuracy | 5.8074 | 0.0044 ** | 3.5448 | 0.0239 * |
| F | 21.9735 | 0.0000 *** | 12.4314 | 0.0002 *** |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Wang, R.; Yang, B.; Yang, L.; Yang, Y.; Liu, F.; Xiong, K. A Direction-Adaptive DBSCAN-Based Method for Denoising ICESat-2 Photon Point Clouds in Forested Environments. Forests 2025, 16, 524. https://doi.org/10.3390/f16030524
Zhang C, Wang R, Yang B, Yang L, Yang Y, Liu F, Xiong K. A Direction-Adaptive DBSCAN-Based Method for Denoising ICESat-2 Photon Point Clouds in Forested Environments. Forests. 2025; 16(3):524. https://doi.org/10.3390/f16030524
Chicago/Turabian StyleZhang, Congying, Ruirui Wang, Banghui Yang, Le Yang, Yaoyao Yang, Fei Liu, and Kaiwei Xiong. 2025. "A Direction-Adaptive DBSCAN-Based Method for Denoising ICESat-2 Photon Point Clouds in Forested Environments" Forests 16, no. 3: 524. https://doi.org/10.3390/f16030524
APA StyleZhang, C., Wang, R., Yang, B., Yang, L., Yang, Y., Liu, F., & Xiong, K. (2025). A Direction-Adaptive DBSCAN-Based Method for Denoising ICESat-2 Photon Point Clouds in Forested Environments. Forests, 16(3), 524. https://doi.org/10.3390/f16030524