Abstract
We investigated the capabilities of a canopy height model (CHM) derived from aerial photographs using the Structure from Motion (SfM) approach to estimate aboveground biomass (AGB) in a tropical forest. Aerial photographs and airborne Light Detection and Ranging (LiDAR) data were simultaneously acquired under leaf-on canopy conditions. A 3D point cloud was generated from aerial photographs using the SfM approach and converted to a digital surface model (DSMP). We also created a DSM from airborne LiDAR data (DSML). From each of DSMP and DSML, we constructed digital terrain models (DTM), which are DTMP and DTML, respectively. We created four CHMs, which were calculated from (1) DSMP and DTMP (CHMPP); (2) DSMP and DTML (CHMPL); (3) DSML and DTMP (CHMLP); and (4) DSML and DTML (CHMLL). Then, we estimated AGB using these CHMs. The model using CHMLL yielded the highest accuracy in four CHMs (R2 = 0.94) and was comparable to the model using CHMPL (R2 = 0.93). The model using CHMPP yielded the lowest accuracy (R2 = 0.79). In conclusion, AGB can be estimated from CHM derived from aerial photographs using the SfM approach in the tropics. However, to accurately estimate AGB, we need a more accurate DTM than the DTM derived from aerial photographs using the SfM approach.
1. Introduction
Tropical forests have been recognized as an important type of ecosystem that can be used in mitigating climate change, because they sequester and store more carbon than any other vegetation types [1,2]. However, tropical forests are being deforested and degraded dramatically through agricultural expansion, wood extraction, infrastructure development, and other natural and anthropogenic processes [3,4]. As a result, carbon emissions from deforestation and forest degradation in tropical forests are a major issue in the global carbon budget [5,6,7,8]. Reducing emissions from deforestation and forest degradation, and the role of conservation, sustainable management of forests and enhancement of forest carbon stocks in developing countries (REDD+) is one mitigation mechanism related to deforestation and forest degradation in tropical forests. For the implementation of REDD+, a scientifically robust method is required to quantify aboveground biomass (AGB) [9]. Remote sensing with ground-based inventories is expected to play an important role as the method that can be used to quantify AGB for the implementation of REDD+.
Airborne Light Detection and Ranging (LiDAR) is an active remote sensing system which directly estimates the vertical structure of objects by measuring the time of flight between the emitted laser pulses and their received reflectance [10]. This system is well suited for measuring forest structural parameters [11,12,13]. In the case of the tropics, a canopy height model (CHM) derived from airborne LiDAR can accurately estimate AGB [14,15] and aboveground carbon stocks [16,17,18]. While airborne LiDAR is one of the most reliable tools used to estimate AGB in forests, acquisition costs of airborne LiDAR data are often prohibitive and hinder the monitoring of large forest areas [19]. Thus, alternative approaches to estimate AGB are required.
Aerial photographs have been common tools used to retrieve forest information for many decades. They are well suited to measure forest cover [20], mean stand height [21], temporal dynamics of AGB [22] and individual tree parameters [23]. It has long been demonstrated that tree height can be measured by manual methods of stereo photogrammetry using aerial photographs. We can also create digital surface models (DSMs), which are similar to those derived from airborne LiDAR, from a pair of stereo aerial photographs using stereo matching algorithms. The DSM derived from aerial photographs have significant potential to accurately estimate tree height, stem volume and basal area [24,25]. Recent progress in computer science enables the production of DSMs using the Structure from Motion (SfM) approach with a much higher level of automation and much greater ease of use [26]. SfM aims to generate 3D geometry from an unordered overlapping collection of photographs using standard automated techniques employing computer vision and photogrammetry [27]. Applying the SfM approach enables us to produce a high spatial resolution 3D point cloud model similar to those derived from airborne LiDAR. Previous studies have demonstrated the usefulness of the SfM approach for topographic mapping and landslide monitoring [26,28,29,30,31]. A few studies have evaluated the quality of a canopy height model created by an SfM algorithm [32,33,34]. Nevertheless, no known studies evaluate the utility of a CHM created by a SfM algorithm for the estimation of AGB in the tropics.
In general, CHMs are calculated as the difference between the height of the returned pulse or digital surface model (DSM) and ground elevation based on a digital terrain model (DTM). Because the pulses emitted from airborne LiDAR can penetrate below the canopy and reach the ground even in the forested areas, we can generate both a DTM and a DSM from airborne LiDAR alone. Compared with airborne LiDAR, obtaining under-canopy information using aerial photography is difficult. Thus, creating a DTM is the main limitation we face when calculating a CHM from aerial photography. The combined use of aerial photography derived DSM and airborne LiDAR derived DTM provides one solution. Previous studies have demonstrated that a CHM calculated from a DTM derived from airborne LiDAR and DSM derived from aerial photography have a significant potential for the successful monitoring of boreal forests [25,35,36]. However, this type of research has not yet been conducted in unmanaged tropical forests.
In this study, we investigated the capabilities of a CHM derived from aerial photography using the SfM approach in estimating AGB in tropical forests. We created four types of CHMs, which were calculated from (1) aerial photography deriving a DSM and aerial photography deriving a DTM (CHMPP) (2) aerial photography deriving a DSM and airborne LiDAR deriving a DTM (CHMPL); (3) airborne LiDAR deriving a DSM and aerial photography deriving a DTM (CHMLP), and (4) airborne LiDAR deriving a DSM and airborne LiDAR deriving a DTM (CHMLL). The results of AGB estimation using an aerial photography-derived CHM are compared with the approach of using an airborne LiDAR-derived CHM for AGB estimation. Finally, we investigated the ability of a DSM derived from aerial photography to estimate AGB.
2. Study Area
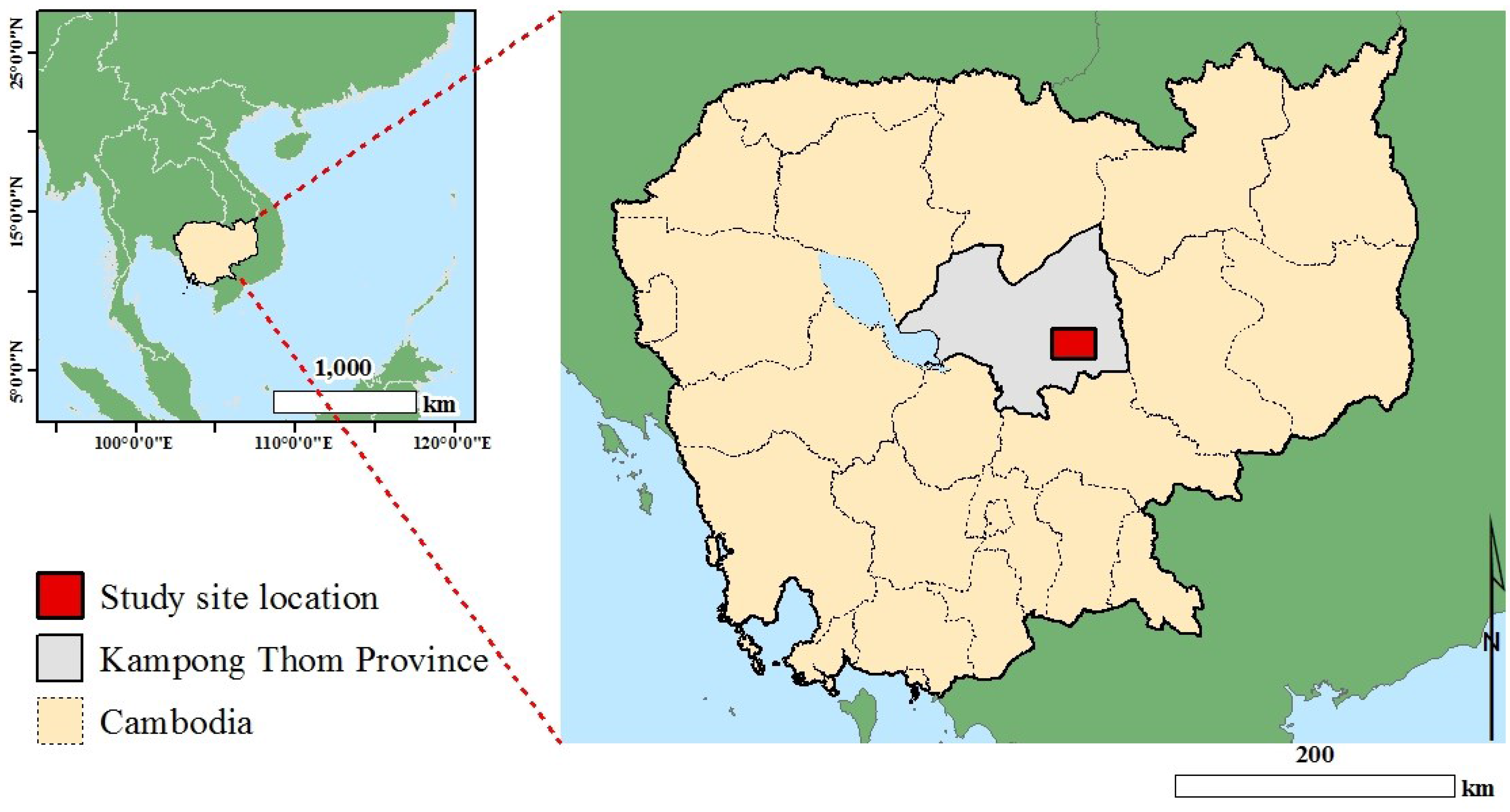
The study area is located in Kampong Thom Province in central Cambodia (Figure 1). Covering a total land area of 1,244,764 ha, this province experiences a typical monsoon Asian climate with a distinct dry season from November to April and a rainy season with about 1700 mm annual precipitation [37]. This lowland and nearly flat area has elevations from about 1 to 80 m above sea level. Four forest types occur in the study area: dense evergreen, deciduous, and degraded evergreen forests as well as an area of second-growth forest. While the dominant tree height is between 30m and 40 m in dense evergreen forest, the height is only 10–15 m in deciduous forest. An area of second-growth forest is defined as any area after clearcutting; these areas have shrubs with few residual trees left standing. Degraded evergreen forest is an evergreen forest with evidence of illegal logging based on field surveys. Degraded evergreen includes fewer large trees than evergreen forest, but the landscape still retains its forested nature.
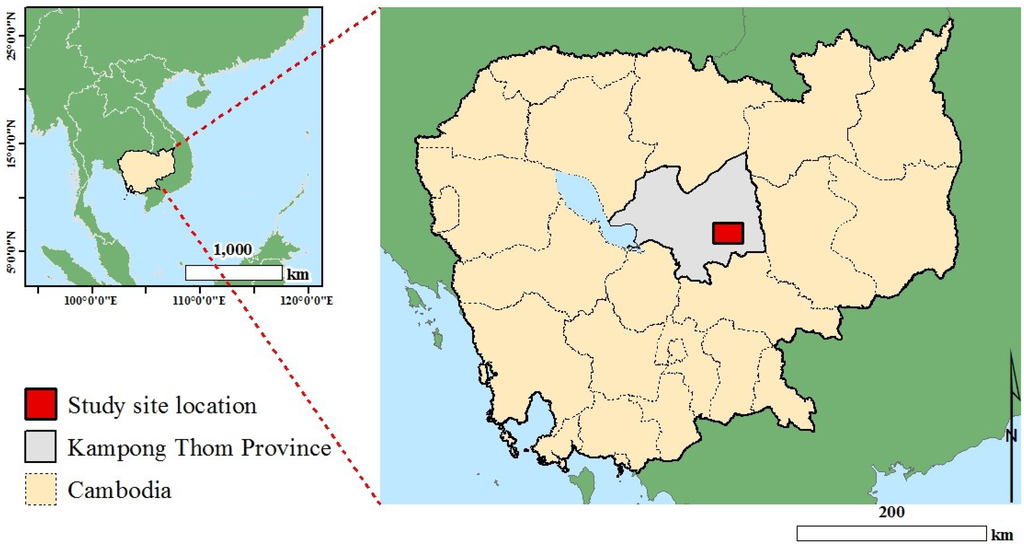
Figure 1.
Study area in Kampong Thom Province, Cambodia with an inset map showing the study site location within extreme Southeast Asia.
Figure 1.
Study area in Kampong Thom Province, Cambodia with an inset map showing the study site location within extreme Southeast Asia.
3. Field Measurements
Field measurements in each forest type were conducted at previously established permanent plots that had been created as a part of a different series of ongoing field studies. The number of plots in dense evergreen, deciduous, degraded evergreen forest and regrowth were 10, 8, 4 and 8, respectively (Table 1). We used three sizes of rectangular permanent plots, which are 2500 m2 (50 m × 50 m), 1200 m2 (30 m × 40 m) and 900 m2 (30 m × 30 m). Eight regrowth plots and four deciduous forest plots cover 2500 m2. Five evergreen and two deciduous forests plots cover 1200 m2. Five evergreen, four degraded forest and two deciduous forest plots cover 900 m2. Field measurements were collected under leaf-on canopy conditions between November 2011 and March 2012. Within each plot, the diameter at breast height (DBH) for all trees with DBH > 5 cm was measured. The coordinates of plot corners were collected using a Global Positioning System (GPS; GPSmap 62s, Garmin, Olathe, KS, USA). In addition, we measured the distance and the azimuth direction between each corner using a laser range finder (Trupulse 360, Laser Technology Inc., Centennial, CO, USA). Because the GPS instrument was not differentially corrected, the accuracy of GPS data was open to question. Thus, we selected the most reliable GPS corner coordinates for each plot through a verification process. Ota et al. (in press) will provide detailed descriptions of the verification process. From the selected corner, we determined the coordinate of other corners mathematically from the distance (i.e., 30 m, 40 m or 50 m) and azimuth directions between the corners. We calculated AGB for each measured tree using general allometric equations [38]. AGB of each plot was then calculated by summing AGB of each tree and divided by the plot size.

Table 1.
Summary of field measurements of aboveground biomass.
| Forest type | Count | AGB (Mg/ha) | |||
|---|---|---|---|---|---|
| Min | Mean | Max | SD | ||
| Evergreen | 10 | 176 | 294 | 398 | 65 |
| Degraded evergreen | 4 | 96 | 132 | 176 | 31 |
| Deciduous | 8 | 38 | 98 | 150 | 40 |
| Regrowth | 8 | 22 | 42 | 90 | 21 |
4. Remote Sensing Data
Aerial photographs and airborne LiDAR data were simultaneously acquired under leaf-on canopy conditions from a helicopter with an Airborne GPS and inertial measuring unit on 18–21 January 2012. Table 2 shows details of aerial photograph data and airborne LiDAR data specifications. The average flight altitude was 500 m above ground level and the average flight speed was 25 m/s. In the case of aerial photograph data, camera focal length, image size, and pixel size inside the camera were, 51.2499 mm, 8984 × 6732 pixels and 6.0 μm, respectively. In the case of airborne LiDAR, pulse frequency was 100 kHz and average density of first returns-to-sensor was 26 point/m2.
Table 2.
Details of aerial photograph data and airborne light detection and ranging (LiDAR) data specifications.
| Flight Conditions | |
|---|---|
| Flight altitude (above-ground) | 500 m |
| Flying Speed | 25 m/s |
| Acquisition date | 18–21 January, 2012 |
| Aerial Photograph data acquisition | |
| Instruments | DALSA Sensor + 60.5 Mp Image Sensor 8984 (H) x 6732 (V) Full Frame CCD Color Image Sensor with Rodenstock HR Digaron-W 50 mm f/4 lens. |
| Focal length | 51.2499 mm |
| Scale | 8984 × 6732 pixels |
| Pixel size | 6 μm |
| Ground resolution | 7 cm |
| Average density of point cloud | 22 points/m2 |
| Airborne LiDAR data acquisition | |
| Instruments | Optech ALTM 3100 from Optech, Inc. |
| Pulse repetition frequency | 100 kHz |
| Scan frequency | 53 Hz |
| Foot print | 0.125 m |
| Wave length | 1064 nm |
| Range of view angles | 20° |
| Average density of first returns | 26 pulse/m2 |
5. Methods
5.1. Processing of Airborne LiDAR data
From the first and last returns of the airborne LiDAR data, we constructed a 1 m resolution grid of DSM (DSML) and DTM (DTML) (Figure 2). The last return data were used to create a DTM using ground echoes of reflected LiDAR pulses by filtering earlier returns. In the filtering process, the local minima with 10 × 10 m, assumed to represent the ground, were collected. Then, we produced a triangulated irregular network (TIN) that allowed for development of a DTM [39]. Finally, the TIN was converted to a regular grid at 1 m resolution to create a DTM. The first return-to-sensor data were also used to create an airborne LiDAR derived DSM. The DSM was created from the highest first return value of pulses for each grid cell.
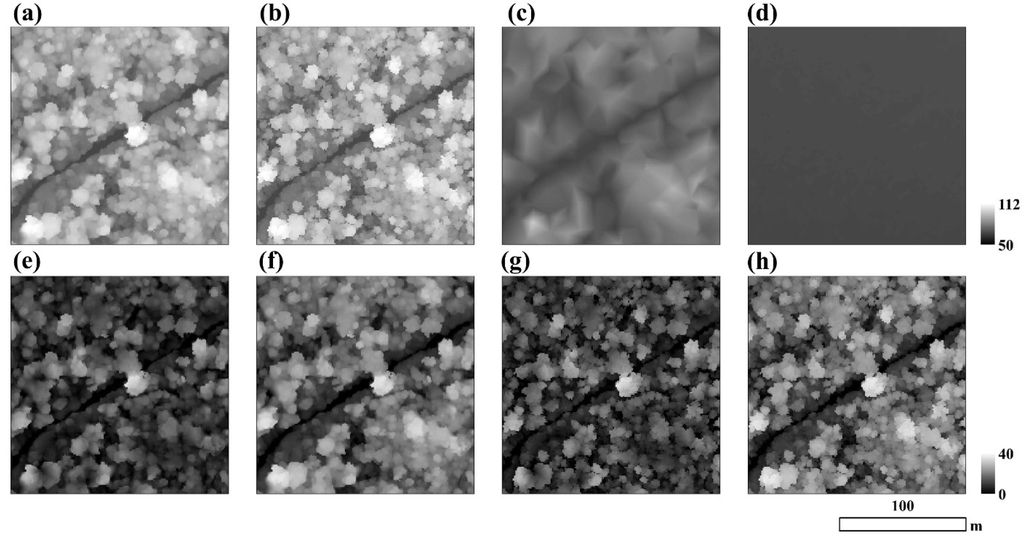
Figure 2.
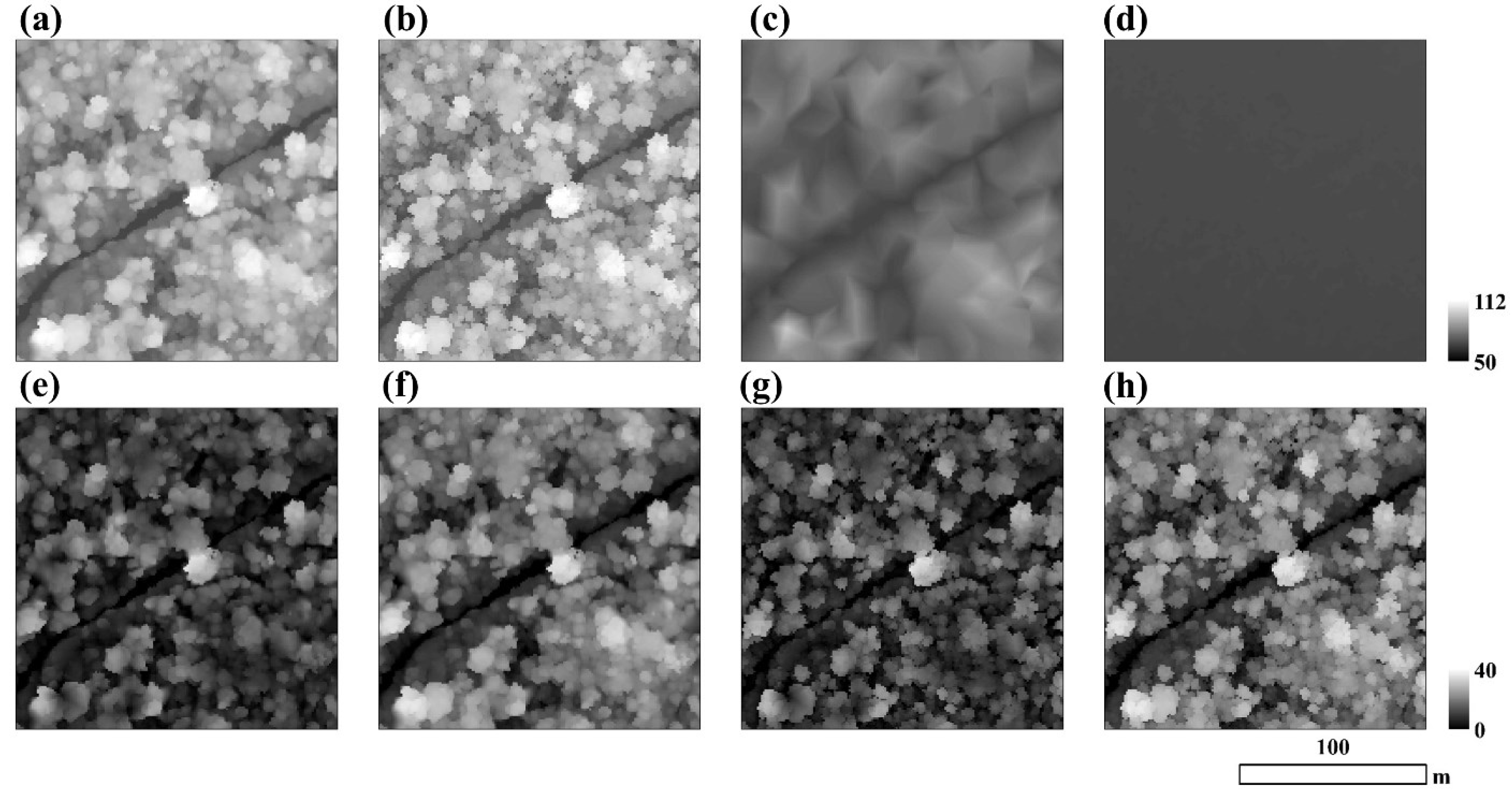
Representative samples of DSM, DTM, and CHM. (a) DSMP; (b) DSML; (c) DTMP; (d) DTML; (e) CHMPP; (f) CHMPL; (g) CHMLP; (h) CHMLL.
Figure 2.
Representative samples of DSM, DTM, and CHM. (a) DSMP; (b) DSML; (c) DTMP; (d) DTML; (e) CHMPP; (f) CHMPL; (g) CHMLP; (h) CHMLL.
5.2. Processing of Aerial Photographs
We used Photoscan Professional (http://www.agisoft.com; Petersburg, Russia), which is a type of commercial computer vision software, to generate a 3D point cloud from the sets of aerial photographs. Dandois and Ellis [34] and Turner et al. [40] provide a detailed description of the software and workflow. Briefly, the software uses the SfM approach for 3D reconstruction from overlapping collection of photographs. The workflow starts with the “Align Photos” stage, which is the process used to find the camera position and orientation for each aerial photograph and build a sparse point cloud model [41]. We selected “High accuracy” and “Ground control pre-selection” as settings. This stage was conducted in the real-world coordinate system, which was Universal Transverse Mercator projection (Zone 48N, WGS 84) based on the camera positions provided by Airborne GPS. We also manually identified ground control points (GCPs) within the aerial photographs to improve the accuracy of the align photos stage. The GCPs consisted of curbs, building corners and so on and were selected from a DSM created by airborne LiDAR data in 2012 (i.e., the DSM created in this study) and aerial orthophotography from 2014 (0.1 m pixel resolution, collected on 20 January 2014, developed by Asia Air Survey Co., Ltd. (Tokyo, Japan). We detected GCP positions in the aerial photographs by manual interpretation of 3D structures and RGB colors corresponding to GCP features identified in the DSM and the orthophotographs following Dandois and Ellis [33]. Horizontal and vertical coordinates for GCPs positions were obtained from a DSM derived from airborne LiDAR. Extracting vertical coordinates from airborne LiDAR, we used “Extract Values to Points” function of ArcGIS desktop 10.2. The next workflow step is the “Build dense point cloud” stage which generates a 3D dense point cloud data based on the estimated camera position and orientation for each aerial photograph. We selected “medium quality” and “mild” as settings. Finally, a dense point cloud with 22 points/m2, in average, was generated.
From the generated 3D dense point cloud data, we constructed a 1 m resolution grid of DSM (DSMP) and DTM (DTMP) (Figure 2), similar to those derived from airborne LiDAR. We used the same approach when we generated DTML and DTMP. First, we selected points assumed to represent the ground using the local minima with 10 × 10 m. Then, the TIN was then generated from the selected points. The TIN was converted to a regular grid at 1 m resolution to create a DTM. In addition, the DSM was created from the highest value of the point cloud for each grid cell.
5.3. Calculation of CHM and CHM-Derived Variables
CHMs were calculated as the relative height between the DSM and DTM. In this study, we created four CHMs, which are the difference between 1) DSMP and DTMP (CHMPP), 2) DSMP and DTML (CHMPL), 3) DSML and DTMP (CHMLP) and 4) DSML and DTML (CHMLL). The pixels of each CHM were classified as either canopy or non-canopy pixels based on their relative height to avoid the potential inclusion of non-tree objects. The pixels of the CHM were classified as canopy if the normalized canopy height was ≥1 m. For each CHM, the variables derived from the CHM were then calculated within each permanent plot, including mean canopy height (the average value of the relative height Hmean), 50th percentile of height (H50), maximum height (H100), and canopy density (D). The canopy density was calculated as the ratio between the number of pixels representing the canopy and the total number of pixels in each plot.
5.4. Statistical Analysis
The observed AGB based on field measurements was regressed against the variables derived from the CHM (Equation (1)):
where B is the observed AGB (Mg/ha), β0 and β1 and β2 are the regression coefficients, h is the height variable (i.e., Hmean, H50, H100) and d is the canopy density. We used log transformation to simplify Equation (1) as a linear regression in Equation (2):
In addition, the influence of forest type (Ftype) on the regression was assessed by expanding Equation (2) with dummy variables representing forest type (i.e., evergreen, degraded evergreen, deciduous, and regrowth) following Ota et al. [18].
where bi is the regression coefficient of ith class and zi is the dummy variable of ith class. The dummy variables’ names z1, z2 and z3 take on values 1 for degraded evergreen, deciduous and regrowth, respectively and on value 0 for other types of forest in each respective group (z1, z2 and z3).
First, AGB was regressed against height variables and/or canopy density for each of CHMPP, CHMPL, CHMLP, and CHMLL. Additionally, the pertinence of considering forest type in the analysis was assessed. Then, the best model used to estimate AGB using each of four CHMs was selected. Finally, we compared the accuracy of AGB estimation using the best model of four CHMs. The coefficient of determination (R2), adjusted R2 and the root mean square error (RMSE) expressed in MG/ha were calculated to express the accuracy of estimates of AGB. Because we used the log transformed equation, R2 and adjusted R2 were calculated using the observed and estimated values of AGB. Furthermore, R2, adjusted R2 and RMSE were calculated using leave one-out cross-validation because of the limited number of field plots.
6. Results
Table 3 shows the results of the regression model fit depicting the relationship between AGB and CHM derived variables when we use CHMPL and CHMPP. When we use CHMPP, the best single-variable model was Hmean (R2 = 0.31, adjusted R2 = 0.28, RMSE = 98.82 Mg/ha), followed by H100 (R2 = 0.24, adjusted R2 = 0.22, RMSE = 103.06 Mg/ha). The R2, the adjusted R2 and the RMSE of the combined model of the height variable and canopy density were higher than the corresponding single height model. The best combined model was used Hmean + D (R2 = 0.41, adjusted R2 = 0.36, RMSE = 89.54 Mg/ha), followed by H100 + D (R2 = 0.36, adjusted R2 = 0.31, RMSE = 93.68 Mg/ha). Similarly, adding the forest type information improved the accurate estimation of AGB in terms of R2, adjusted R2 and RMSE. The model using D + Ftype yielded the highest adjusted R2 and the lowest RMSE in all models (R2 = 0.79, adjusted R2 = 0.76, RMSE = 51.79 Mg/ha). Thus, we conclude that D + Ftype is the best model that can be used to explain AGB independent from forest type when we use CHMPP.
When we used CHMPL, the best single-variable model was Hmean (R2 = 0.93, adjusted R2 = 0.93, RMSE = 31.30 Mg/ha), followed by H50 (R2 = 0.92, adjusted R2 = 0.92, RMSE = 32.55 Mg/ha). The RMSE of the combined model of the height variable and canopy density was close to the corresponding single height model. In terms of the adjusted R2, canopy density was not informative because the adjusted R2 of the combined model of the height variable and canopy density was equal to or smaller than the corresponding single height model. Similarly, while adding the forest type information improved the accurate estimation of AGB in terms of RMSE, forest type information is not informative in terms of the adjusted R2. The adjusted R2 of single Hmean was the highest after considering forest type. Thus, we conclude that Hmean could explain AGB independent from forest type when we use CHMPL.
Table 3.
Results of estimation models each of canopy height model using canopy height model (CHM)PP and CHMPL.
| Variables | RMSE (Mg/ha) | R2 | Adjusted R2 | |
|---|---|---|---|---|
| CHMPP | H50 | 109.91 | 0.20 | 0.17 |
| H100 | 103.06 | 0.24 | 0.22 | |
| Hmean | 98.82 | 0.31 | 0.28 | |
| D | 113.99 | 0.10 | 0.06 | |
| H50 + D | 97.97 | 0.30 | 0.25 | |
| H100 + D | 93.68 | 0.36 | 0.31 | |
| Hmean + D | 89.54 | 0.41 | 0.36 | |
| H50 + Ftype | 56.81 | 0.75 | 0.72 | |
| H100 + Ftype | 68.24 | 0.66 | 0.61 | |
| Hmean + Ftype | 63.48 | 0.70 | 0.66 | |
| D + Ftype | 51.79 | 0.79 | 0.76 | |
| H50 + D + Ftype | 56.22 | 0.76 | 0.71 | |
| H100 + D + Ftype | 67.06 | 0.67 | 0.61 | |
| Hmean + D + Ftype | 62.12 | 0.71 | 0.65 | |
| CHMPL | H50 | 32.55 | 0.92 | 0.92 |
| H100 | 55.29 | 0.79 | 0.78 | |
| Hmean | 31.30 | 0.93 | 0.93 | |
| D | 114.42 | 0.10 | 0.07 | |
| H50 + D | 35.92 | 0.91 | 0.90 | |
| H100 + D | 55.16 | 0.79 | 0.78 | |
| Hmean + D | 33.36 | 0.93 | 0.92 | |
| H50 + Ftype | 30.31 | 0.93 | 0.92 | |
| H100 + Ftype | 46.10 | 0.84 | 0.81 | |
| Hmean + Ftype | 28.47 | 0.94 | 0.93 | |
| D + Ftype | 49.02 | 0.82 | 0.79 | |
| H50 + D + Ftype | 31.34 | 0.92 | 0.91 | |
| H100 + D + Ftype | 43.54 | 0.86 | 0.83 | |
| Hmean + D + Ftype | 29.47 | 0.93 | 0.92 |
Table 4 shows the results of the regression model fit depicting the relationship between AGB and CHM derived variables when we use CHMLP and CHMLL. When we use CHMLP, the best single-variable model was Hmean (R2 = 0.25, adjusted R2 = 0.22, RMSE = 104.53 Mg/ha). As is the case with AGB estimation using CHMPP, adding the forest type information improved the accurate estimation of AGB in terms of R2, adjusted R2 and RMSE. The model using D + Ftype yielded the highest adjusted R2 and the lowest RMSE in all models (R2 = 0.78, adjusted R2 = 0.75, RMSE = 53.08 Mg/ha). Thus, we conclude that D + Ftype is the best model that can be used to explain AGB independent from forest type when we use CHMLP. When we use CHMLL the best single-variable model was Hmean (R2 = 0.94, adjusted R2 = 0.94, RMSE = 30.73 Mg/ha). As is the case with AGB estimation using CHMPL, canopy density and the forest type information did not improve the accuracy of AGB estimation. Thus, we conclude that Hmean is the best model that can be used to explain AGB independent from forest type when we use CHMLL.
Table 4.
Results of estimation models each of canopy height model using CHMLP and CHMLL.
| Variables | RMSE (Mg/ha) | R2 | Adjusted R2 | |
|---|---|---|---|---|
| CHMLP | H50 | 118.28 | 0.14 | 0.11 |
| H100 | 106.72 | 0.19 | 0.16 | |
| Hmean | 104.53 | 0.25 | 0.22 | |
| D | 124.23 | 0.05 | 0.02 | |
| H50 + D | 118.31 | 0.13 | 0.07 | |
| H100 + D | 107.73 | 0.17 | 0.11 | |
| Hmean + D | 104.77 | 0.24 | 0.18 | |
| H50 + Ftype | 77.70 | 0.60 | 0.53 | |
| H100 + Ftype | 68.80 | 0.66 | 0.60 | |
| Hmean + Ftype | 77.82 | 0.59 | 0.53 | |
| D + Ftype | 53.08 | 0.78 | 0.75 | |
| H50 + D + Ftype | 78.26 | 0.59 | 0.51 | |
| H100 + D + Ftype | 69.55 | 0.65 | 0.58 | |
| Hmean + D + Ftype | 78.08 | 0.59 | 0.51 | |
| CHMLL | H50 | 32.17 | 0.93 | 0.92 |
| H100 | 54.89 | 0.81 | 0.8 | |
| Hmean | 30.73 | 0.94 | 0.94 | |
| D | 110.11 | 0.15 | 0.12 | |
| H50 + D | 33.04 | 0.92 | 0.92 | |
| H100 + D | 53.01 | 0.82 | 0.8 | |
| Hmean + D | 31.25 | 0.94 | 0.93 | |
| H50 + Ftype | 31.84 | 0.92 | 0.91 | |
| H100 + Ftype | 46.45 | 0.84 | 0.81 | |
| Hmean + Ftype | 28.63 | 0.94 | 0.93 | |
| D + Ftype | 51.21 | 0.80 | 0.77 | |
| H50 + D + Ftype | 32.48 | 0.92 | 0.9 | |
| H100 + D + Ftype | 45.02 | 0.85 | 0.82 | |
| Hmean + D + Ftype | 29.12 | 0.94 | 0.92 |
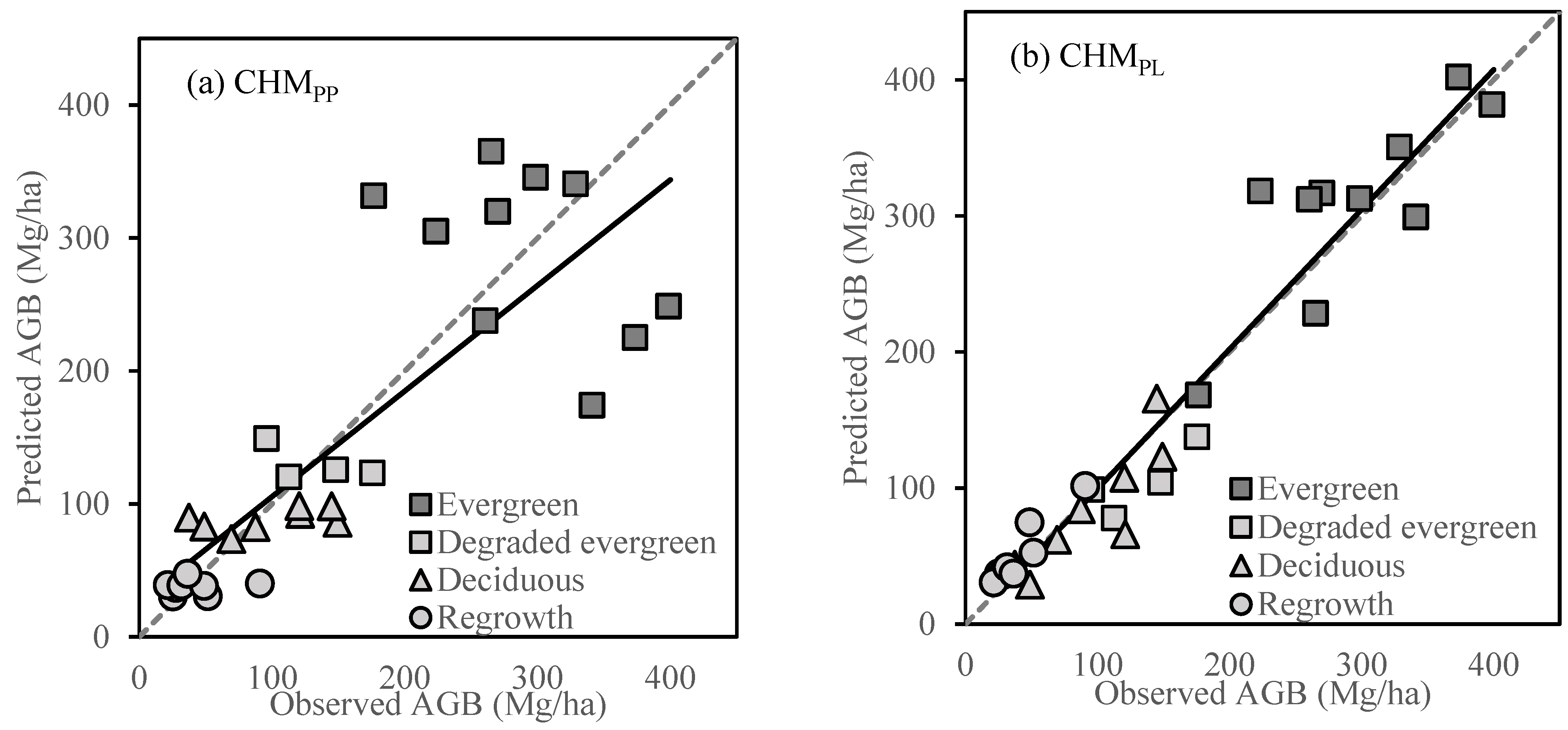
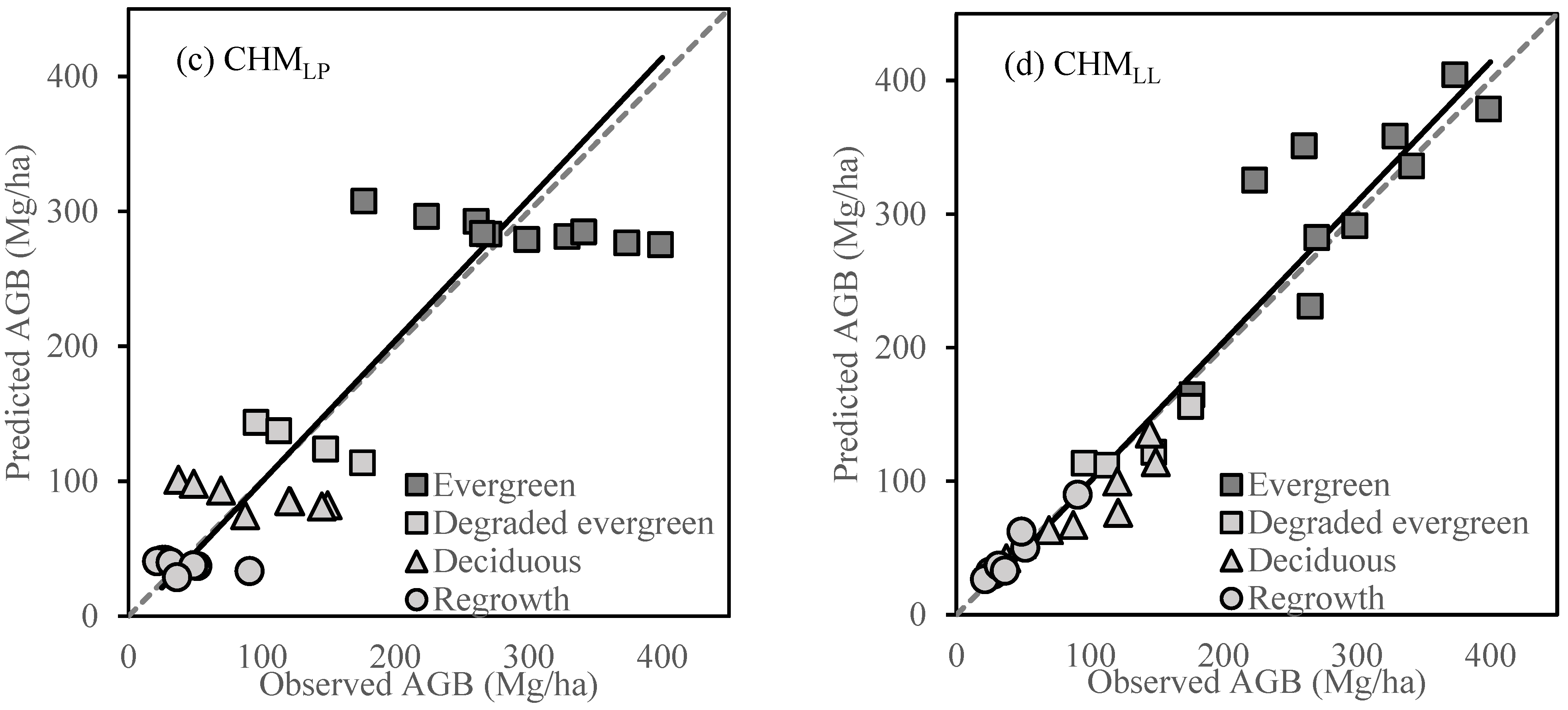
Figure 3 shows the observed versus predicted values for AGB estimation using the best model of CHMPP, CHMPL, CHMLP and CHMLL. The predicted values using CHMPL model were close to the predicted values using the CHMLL model, while the predicted values using the CHMPP model were far from the predicted values using the CHMPL and CHMLL models. Both regression lines using the CHMPL and CHMLL model were almost in line with the 1:1 line.
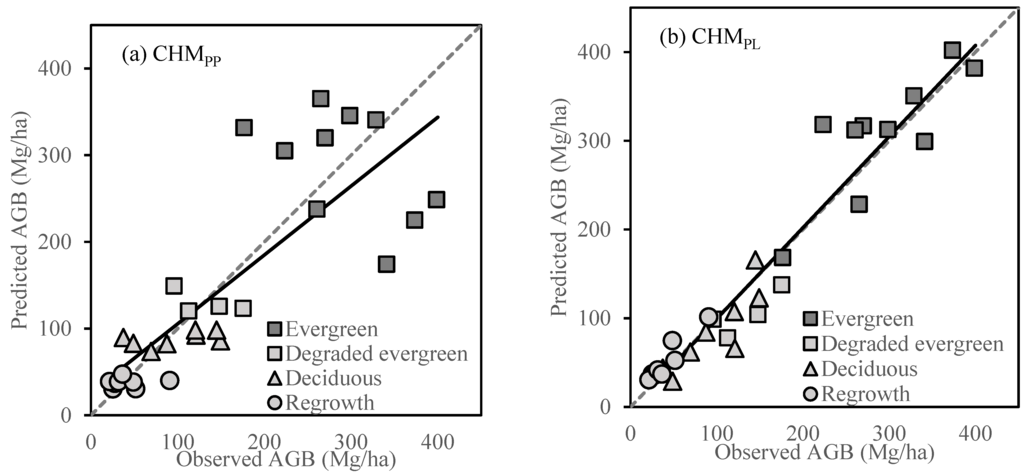
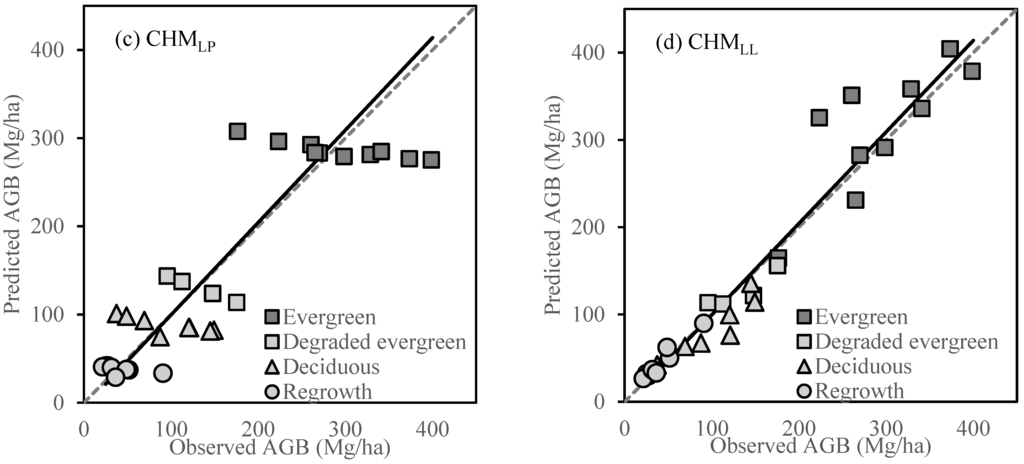
Figure 3.
Observed aboveground biomass (AGB) versus predicted AGB from the best model of each of the canopy height models (CHMs). (a) CHMPP; (b) CHMPL; (c) CHMLL. A diagonal dotted line and a cross solid line indicate the 1:1 line and regression line between predicted AGB and observed AGB, respectively.
Figure 3.
Observed aboveground biomass (AGB) versus predicted AGB from the best model of each of the canopy height models (CHMs). (a) CHMPP; (b) CHMPL; (c) CHMLL. A diagonal dotted line and a cross solid line indicate the 1:1 line and regression line between predicted AGB and observed AGB, respectively.
7. Discussion
When CHMPL and CHMLL were used, the single-variable models using Hmean yielded a higher R2 and lower RMSE compared with other single-variable models (Table 3 and Table 4). In the case of tropical forests, several studies using airborne LiDAR have shown how mean height can be used to estimate AGB or aboveground carbon density in the tropics [15,17,42,43]. Our study has confirmed that mean height is particularly a well suited index to estimate AGB, even if we used a DSM derived from aerial photography using the SfM approach.
The R2, RMSE and the predicted values of the best model from CHMPL were close to the best model from CHMLL (Table 3 and Table 4, Figure 3). These results imply that AGB estimation using metrics from a combination of aerial photography with the SfM approach and airborne LiDAR was comparable to that using metrics from only airborne LiDAR. Previous studies showed that height metrics from aerial photography allow the accurate estimation canopy height in temperate forests [32,33,34], and height, diameter, basal area, stem volume and AGB in boreal forests [36]. Our study demonstrated the ability to estimate AGB in tropical forests using the combination of aerial photography with the SfM approach and airborne LiDAR. Acquiring under-canopy information from aerial photography is the difficult task. Thus, difficulty in creating a DTM is the main limitation when we calculate a CHM using only aerial photography. As a result, the estimation accuracy using CHMPP and CHMLP were lower than the estimation accuracy using CHMPL and CHMLL (Table 3 and Table 4). These results imply that the accuracy of a DTM derived from aerial photography is not enough to estimate AGB in the tropics and that, for the accurate estimation of AGB, at least a single acquisition of airborne LiDAR is required to create a DTM. However, once a DTM was created by airborne LiDAR, aerial photographs can be used to accurately estimate AGB. This represents a strong advantage in the case of REDD+ implementation because AGB should be estimated repeatedly to monitor deforestation and forest degradation over extended time frames for REDD+ implementation. While this study used a helicopter to acquire the aerial photography, use of a low-cost Unmanned Aerial Vehicle (UAV) is becoming a popular method to collect aerial photographs [34,44]. A UAV may contribute to a dramatic cost reduction of repeated monitoring of tropical forests. Thus, we need further research to evaluate the applicability of aerial photographs captured from a UAV, instead of manned aerial vehicle, with SfM approaches in tropical forests.
CHMPL accurately estimated AGB without the consideration of forest types (Table 3). Similar results were obtained in previous studies that estimated AGB using airborne LiDAR in boreal coniferous forests [45], temperate coniferous forests [46] and tropical forests [18]. Our results confirmed that the combination of aerial photography with the SfM approach and airborne LiDAR can also estimate AGB independently of forest type in tropical forests. These results imply that the calibration process of the equation between AGB and CHM for each individual forest type is not necessary. Only the calibration process for data sets gathering forest types all together is adequate. This may provide a strong advantage for the use of aerial photography and airborne LiDAR in areas where several forest types are intricately distributed and mixed, because it is possible to simplify the calibration process, including laborious and time-consuming forest inventory for each forest type [18].
Although several studies have demonstrated the power of using airborne LiDAR to estimate AGB, the acquisition of airborne LiDAR is costly. Thus, alternative approaches that can be used to estimate AGB are required. In this study, we investigated the capabilities of a DSM derived from aerial photograph using the SfM approach to estimate AGB in tropical forests and compared the results with the more promising airborne LiDAR approach. In conclusion, AGB can be estimated from metrics derived from aerial photographs using the SfM approach in the tropics. However, for the accurate estimation of AGB, we need a more accurate DTM than the DTM derived from aerial photography using SfM approach. Thus, the acquisition of airborne LiDAR that can be used to create a DTM is required. When we calibrate the parameters of the equation between AGB and related metrics, the calibration process for each individual forest type is not necessary. In the future, the applicability of UAV with SfM approaches in tropical forests should be evaluated.
Acknowledgments
This study is part of the “Technology Development for Circulatory Food Production Systems Responsive to Climate Change” project and was supported by the Ministry of Agriculture, Forestry and Fisheries, Japan.
Author Contributions
All authors contributed extensively to the work. Tetsuji Ota and Miyuki Ogawa performed the processing and lead writing of the manuscript. Katsuto Shimizu, Tsuyoshi Kajisa, Nobuya Mizoue, Shigejiro Yoshida supervised the research work, reviewed the manuscript and gave comments and suggestions to improve the manuscript. Gen Takao, Yasumasa Hirata and Naoyuki Furuya reviewed the manuscript and gave comments and suggestions on the manuscript, making sure to include insights on tropical forests and related forest practices. Takio Sano contributed to acquiring remote sensing data in Cambodia. Heng Sokh and Vuthy Ma liaised to obtain permission to conduct research in the Cambodian forest and provided significant knowledge about forests in Cambodia. Eriko Ito, Jumpei Toriyama, Yukako Monda, Hideki Saito, Yoshiyuki Kiyono, Sophal Chann and Nang Ket contributed to conducting field measurements.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gibbs, H.K.; Brown, S.; Niles, J.O.; Foley, J.A. Monitoring and Estimating Tropical Forest Carbon Stocks: Making REDD a Reality. Environ. Res. Lett. 2007, 2. [Google Scholar] [CrossRef]
- Lewis, S.L.; Lopez-Gonzalez, G.; Sonké, B.; Affum-Baffoe, K.; Baker, T.R.; Ojo, L.O.; Phillips, O.L.; Reitsma, J.M.; White, L.; Comiskey, J.A.; et al. Increasing Carbon Storage in Intact African Tropical Forests. Nature 2009, 457, 1003–1006. [Google Scholar] [CrossRef] [PubMed]
- Geist, H.J.; Lambin, E.F. Proximate Causes and Underlying Driving Forces of Tropical Deforestation. Bioscience 2002, 52, 143–150. [Google Scholar] [CrossRef]
- Hosonuma, N.; Herold, M.; De Sy, V.; de Fries, R.S.; Brockhaus, M.; Verchot, L.; Angelsen, A.; Romijn, E. An Assessment of Deforestation and Forest Degradation Drivers in Developing Countries. Environ. Res. Lett. 2012, 7. [Google Scholar] [CrossRef]
- Canadell, J.G.; Le Quéré, C.; Raupach, M.R.; Field, C.B.; Buitenhuis, E.T.; Ciais, P.; Conway, T.J.; Gillett, N.P.; Houghton, R.A.; Marland, G. Contributions to Accelerating Atmospheric CO2 Growth from Economic Activity, Carbon Intensity, and Efficiency of Natural Sinks. Proc. Natl. Acad. Sci. USA 2007, 104, 18866–18870. [Google Scholar] [CrossRef] [PubMed]
- Houghton, R.A. Carbon Emissions and the Drivers of Deforestation and Forest Degradation in the Tropics. Current Opinion in Environmental Sustainability 2012, 4, 597–603. [Google Scholar] [CrossRef]
- Le Quéré, C.; Raupach, M.R.; Canadell, J.G.; Marland, G.; Bopp, L.; Ciais, P.; Conway, T.J.; Doney, S.C.; Feely, R.A.; Foster, P.; et al. Trends in the Sources and Sinks of Carbon Dioxide. Nat. Geosci. 2009, 2, 831–836. [Google Scholar] [CrossRef]
- Pearson, T.R.H.; Brown, S.; Casarim, F.M. Carbon Emissions from Tropical Forest Degradation Caused by Logging. Environmental Research Letters 2014, 9. [Google Scholar] [CrossRef]
- Böttcher, H.; Eisbrenner, K.; Fritz, S.; Kindermann, G.; Kraxner, F.; McCallum, I.; Obersteiner, M. An Assessment of Monitoring Requirements and Costs of ‘Reduced Emissions from Deforestation and Degradation’. Carbon Balance Manag. 2009, 4, 7. [Google Scholar] [CrossRef] [PubMed]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of Forest Structural Parameters using LiDAR Remote Sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Moeser, D.; Roubinek, J.; Schleppi, P.; Morsdorf, F.; Jonas, T. Canopy Closure, LAI and Radiation Transfer from Airborne LiDAR Synthetic Images. Agric. For. Meteorol. 2014, 197, 158–168. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Baldocchi, D.; Tian, Y.Q. Estimating Basal Area and Stem Volume for Individual Trees from Lidar Data. Photogramm. Eng. Remote Sens. 2007, 73, 1355–1365. [Google Scholar] [CrossRef]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.A. Estimating Canopy Structure of Douglas-Fir Forest Stands from Discrete-Return LiDAR. Trees—Struct. Funct. 2007, 21, 295–310. [Google Scholar] [CrossRef]
- Englhart, S.; Jubanski, J.; Siegert, F. Quantifying Dynamics in Tropical Peat Swamp Forest Biomass with Multi-Temporal LiDAR Datasets. Remote Sens. 2013, 5, 2368–2388. [Google Scholar] [CrossRef]
- Ioki, K.; Tsuyuki, S.; Hirata, Y.; Phua, M.-H.; Wong, W.V.C.; Ling, Z.-Y.; Saito, H.; Takao, G. Estimating Above-Ground Biomass of Tropical Rainforest of Different Degradation Levels in Northern Borneo using Airborne LiDAR. For. Ecol. Manag. 2014, 328, 335–341. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; van Breugel, M. A Universal Airborne LiDAR Approach for Tropical Forest Carbon Mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P.; Powell, G.V.N.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; et al. High-Resolution Forest Carbon Stocks and Emissions in the Amazon. Proc. Natl. Acad. Sci. USA 2010, 107, 16738–16742. [Google Scholar] [CrossRef] [PubMed]
- Ota, T.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; Ponce-Hernandez, R.; Ahmed, O.S.; et al. Estimating Aboveground Carbon using Airborne LiDAR in Cambodian Tropical Seasonal Forests for REDD+ Implementation. J. For. Res. 2015, in press. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Cohen, W.B.; Kennedy, R.E.; Yang, Z. Using Landsat-Derived Disturbance and Recovery History and Lidar to Map Forest Biomass Dynamics. Remote Sens. Environ. 2014, 151, 124–137. [Google Scholar] [CrossRef]
- Loepfe, L.; Martinez-Vilalta, J.; Oliveres, J.; Piñol, J.; Lloret, F. Feedbacks between Fuel Reduction and Landscape Homogenisation Determine Fire Regimes in Three Mediterranean Areas. For. Ecol. Manag. 2010, 259, 2366–2374. [Google Scholar] [CrossRef]
- Balenovic, I.; Seletkovic, A.; Pernar, R.; Jazbec, A. Estimation of the Mean Tree Height of Forest Stands by Photogrammetric Measurement using Digital Aerial Images of High Spatial Resolution. Ann. For. Res. 2015, 58, 125–143. [Google Scholar] [CrossRef]
- Massada, A.B.; Carmel, Y.; Even Tzur, G.; Grünzweig, J.M.; Yakir, D. Assessment of Temporal Changes in Aboveground Forest Tree Biomass using Aerial Photographs and Allometric Equations. Can. J. For. Res. 2006, 36, 2585–2594. [Google Scholar] [CrossRef]
- Gong, P.; Sheng, Y.; Biging, G.S. 3D Model-Based Tree Measurement from High-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2002, 68, 1203–1212. [Google Scholar]
- Bohlin, J.; Wallerman, J.; Fransson, J.E.S. Forest Variable Estimation using Photogrammetric Matching of Digital Aerial Images in Combination with a High-Resolution DEM. Scand. J. For. Res. 2012, 27, 692–699. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest Variable Estimation using a High-Resolution Digital Surface Model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic Structure from Motion: A New Development in Photogrammetric Measurement. Earth Surf. Process. Landforms 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the World from Internet Photo Collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time Series Analysis of Landslide Dynamics using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.; Turner, D. Mapping Landslide Displacements using Structure from Motion (SfM) and Image Correlation of Multi-Temporal UAV Photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Niethammer, U.; Rothmund, S.; Schwaderer, U.; Zeman, J.; Joswig, M. Open Source Image-Processing Tools for Low-Cost UAV-Based Landslide Investigations. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives; ISPRS: Zurich, Switzerland, 2011; pp. 161–166. [Google Scholar]
- James, M.R.; Robson, S. Mitigating Systematic Error in Topographic Models Derived from UAV and Ground-Based Image Networks. Earth Surf. Process. Landforms 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the Creation of a Forest Canopy Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote Sensing of Vegetation Structure using Computer Vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High Spatial Resolution Three-Dimensional Mapping of Vegetation Spectral Dynamics using Computer Vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Véga, C.; St-Onge, B. Height Growth Reconstruction of a Boreal Forest Canopy Over a Period of 58 Years using a Combination of Photogrammetric and Lidar Models. Remote Sens. Environ. 2008, 112, 1784–1794. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne Laser Scanning and Digital Stereo Imagery Measures of Forest Structure: Comparative Results and Implications to Forest Mapping and Inventory Update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Miyazawa, Y.; Tateishi, M.; Komatsu, H.; Ma, V.; Kajisa, T.; Sokh, H.; Mizoue, N.; Kumagai, T. Tropical Tree Water use Under Seasonal Waterlogging and Drought in Central Cambodia. J. Hydrol. 2014, 515, 81–88. [Google Scholar] [CrossRef]
- Brown, S. Estimating Biomass and Biomass Change of Tropical Forests: A Primer; Food & Agriculture Org.: Rome, Italy, 1997. [Google Scholar]
- Axelsson, P. Processing of Laser Scanner Data—Algorithms and Applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct Georeferencing of Ultrahigh-Resolution UAV Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Agisoft LLC. Agisoft PhotoScan User Manual Professional Edition, Version 1.1. Available online: http://www.Agisoft.Com/Pdf/Photoscan-pro_1_1_en.Pdf (accessed on 4 July 2015).
- Asner, G.P.; Clark, J.K.; Mascaro, J.; Vaudry, R.; Chadwick, K.D.; Vieilledent, G.; Rasamoelina, M.; Balaji, A.; Kennedy-Bowdoin, T.; Maatoug, L.; et al. Human and Environmental Controls Over Aboveground Carbon Storage in Madagascar. Carbon Balance Manag. 2012, 7. [Google Scholar] [CrossRef] [PubMed]
- Mascaro, J.; Asner, G.P.; Muller-Landau, H.C.; Van Breugel, M.; Hall, J.; Dahlin, K. Controls Over Aboveground Forest Carbon Density on Barro Colorado Island, Panama. Biogeosciences 2011, 8, 1615–1629. [Google Scholar] [CrossRef]
- Han, J.; Xu, Y.; Di, L.; Chen, Y. Low-Cost Multi-UAV Technologies for Contour Mapping of Nuclear Radiation Field. J. Intell. Robot. Syst.: Theory Appl. 2013, 70, 401–410. [Google Scholar] [CrossRef]
- Næsset, E. Estimation of above-and below-ground biomass in boreal forest ecosystems. In International Society of Photogrammetry and Remote Sensing. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences; Thies, M., Kock, B., Spiecker, H., Weinacker, H., Eds.; International Society of Photogrammetry and Remote Sensing (ISPRS): Freiburg, Germany, 2004; pp. 145–148. [Google Scholar]
- Lefsky, M.A.; Cohen, W.B.; Harding, D.J.; Parker, G.G.; Acker, S.A.; Gower, S.T. Lidar Remote Sensing of Above-Ground Biomass in Three Biomes. Global Ecol. Biogeogr. 2002, 11, 393–399. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).