Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion

Abstract
:1. Introduction
2. Materials and Methods
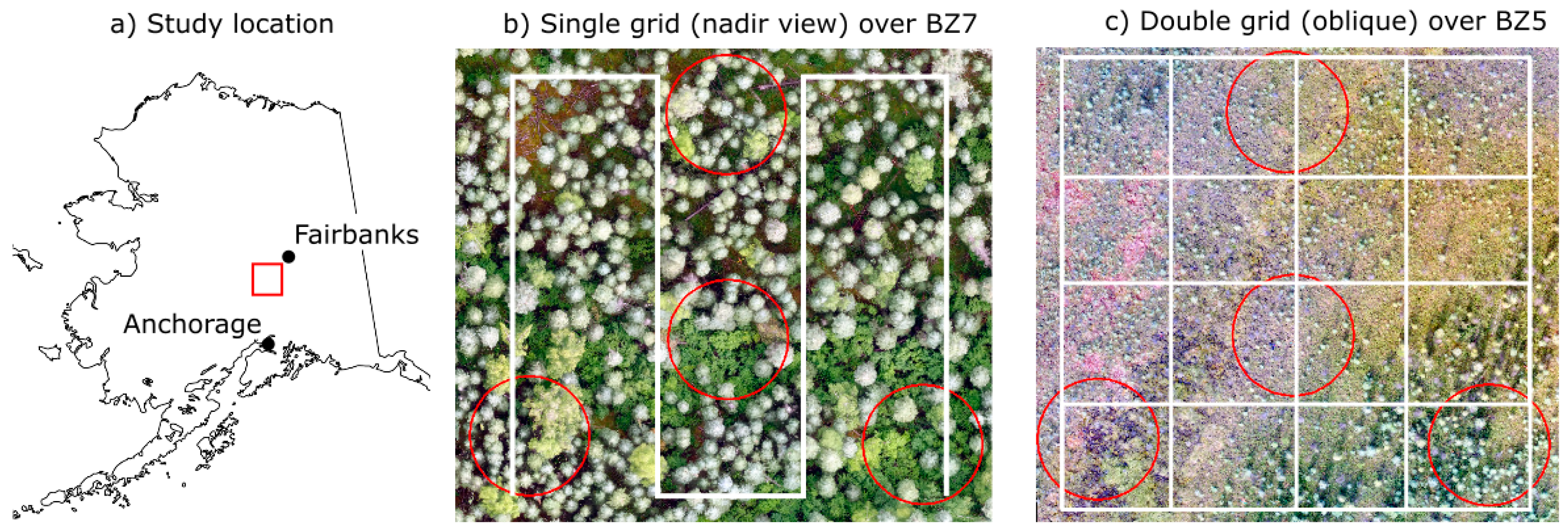
2.1. Study Site and Field Data
2.2. UAV Data Collection and Processing
2.3. Analysis
3. Results
3.1. UAV DTM
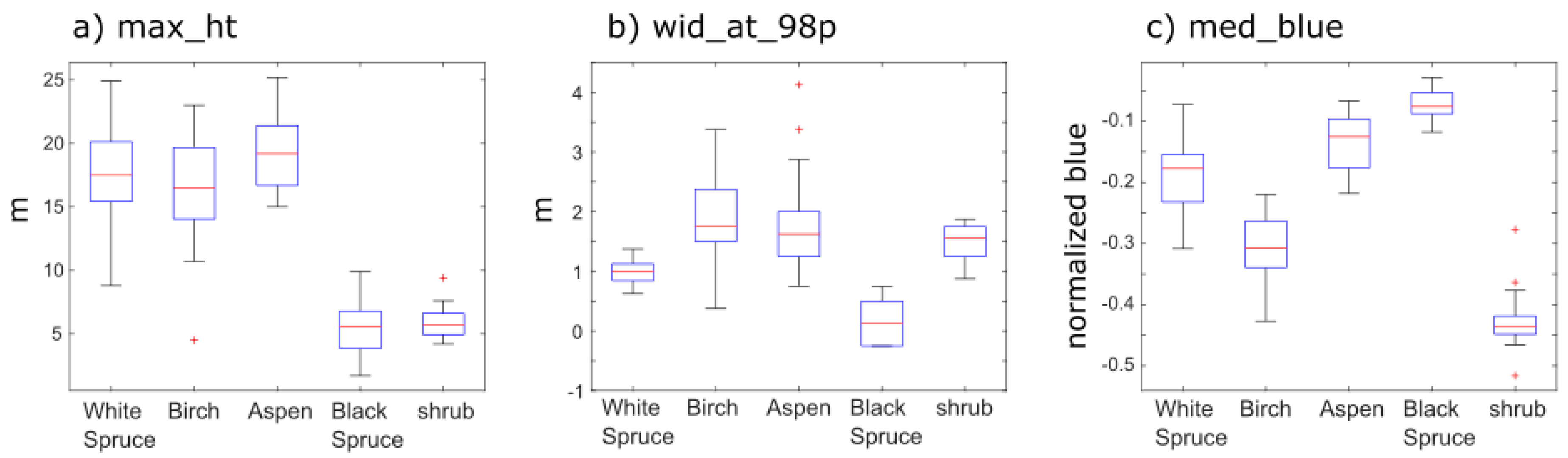
3.2. Crown Structural Estimates
3.3. Species Classification Accuracy
3.4. Estimates of TD, BA, and AGB
3.5. Species Proportions by FIA Plot
4. Discussion
4.1. Segmentation
4.2. Species Classification at Crown and Plot Scale
4.3. Plot-Level Quantities (TD, BA, AGB)
4.4. Limitations and Lessons Learned
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chapin, F.S., III; McGuire, A.D.; Ruess, R.W.; Walker, M.W.; Boone, R.D.; Edwards, M.E.; Finney, B.; Hinzman, L.D.; Jones, J.B.; Juday, G.B. Summary and synthesis: Past and future changes in the Alaskan boreal forest. In Alaska’s Changing Boreal Forest; Oxford University Press: New York, NY, USA, 2006; pp. 332–338. [Google Scholar]
- Turetsky, M.R.; Kane, E.S.; Harden, J.W.; Ottmar, R.D.; Manies, K.L.; Hoy, E.; Kasischke, E.S. Recent acceleration of biomass burning and carbon losses in Alaskan forests and peatlands. Nat. Geosci. 2011, 4, 27–31. [Google Scholar] [CrossRef]
- Intergovernmental Panel on Climate Change. Climate Change 2007: The Physical Science Basis; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Beck, P.S.A.; Goetz, S.J. Satellite observations of high northern latitude vegetation productivity changes between 1982 and 2008: Ecological variability and regional differences. Environ. Res. Lett. 2011, 6, 45501. [Google Scholar] [CrossRef]
- Morton, D.C.; Collatz, G.J.; Wang, D.; Randerson, J.T.; Giglio, L.; Chen, Y. Satellite-based assessment of climate controls on US burned area. Biogeosciences 2013, 10, 247–260. [Google Scholar] [CrossRef] [Green Version]
- Rogers, B.M.; Soja, A.J.; Goulden, M.L.; Randerson, J.T. Influence of tree species on continental differences in boreal fires and climate feedbacks. Nat. Geosci. 2015, 8, 228–234. [Google Scholar] [CrossRef]
- Nelson, R.F.; Ranson, K.J.; Sun, G.; Kimes, D.S.; Kharuk, V.; Montesano, P. Estimating Siberian timber volume using MODIS and ICESat/GLAS. Remote Sens. Environ. 2009, 113, 691–701. [Google Scholar] [CrossRef]
- Ju, J.; Masek, J.G. The vegetation greenness trend in Canada and US Alaska from 1984–2012 Landsat data. Remote Sens. Environ. 2016, 176, 1–16. [Google Scholar] [CrossRef]
- Randerson, J.T.; Liu, H.; Flanner, M.G.; Chambers, S.D.; Jin, Y.; Hess, P.G.; Pfister, G.; Mack, M.C.; Treseder, K.K.; Welp, L.R.; et al. The impact of boral forest fire on climate warming. Sci. Rep. 2006, 314, 1130–1132. [Google Scholar]
- Alonzo, M.; Morton, D.C.; Cook, B.D.; Andersen, H.-E.; Babcock, C.; Pattison, R. Patterns of canopy and surface layer consumption in a boreal forest fire from repeat airborne lidar. Environ. Res. Lett. 2017, 12. [Google Scholar] [CrossRef]
- Veraverbeke, S.; Rogers, B.M.; Randerson, J.T. Daily burned area and carbon emissions from boreal fires in Alaska. Biogeosciences 2015, 12, 3579–3601. [Google Scholar] [CrossRef]
- Babcock, C.; Finley, A.O.; Cook, B.D.; Weiskittel, A.; Woodall, C.W. Modeling forest biomass and growth: Coupling long-term inventory and LiDAR data. Remote Sens. Environ. 2016, 182, 1–12. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Gynan, C.; Mahoney, C.; Sitar, M. Multisensor and multispectral lidar characterization and classification of a forest environment. Can. J. Remote Sens. 2016, 42, 501–520. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.E.; McGaughey, R.J. Light detection and ranging (LIDAR): An emerging tool for multiple resource inventory. J. For. 2005, 103, 286–292. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- Andersen, H.; Strunk, J.; Temesgen, H.; Atwood, D. Using multilevel remote sensing and ground data to estimate forest bi mass resources in remote regions : A case study in the boreal forests of interior Alaska. Can. J. Remote Sens. 2012, 37, 1–16. [Google Scholar] [CrossRef]
- Finley, A.O.; Banerjee, S.; Zhou, Y.; Cook, B.D.; Babcock, C. Joint hierarchical models for sparsely sampled high-dimensional LiDAR and forest variables. Remote Sens. Environ. 2017, 190, 149–161. [Google Scholar] [CrossRef]
- Ene, L.T.; Gobakken, T.; Andersen, H.E.; Næsset, E.; Cook, B.D.; Morton, D.C.; Babcock, C.; Nelson, R. Large-area hybrid estimation of aboveground biomass in interior Alaska using airborne laser scanning data. Remote Sens. Environ. 2018, 204, 741–755. [Google Scholar] [CrossRef]
- Zald, H.S.J.; Wulder, M.A.; White, J.C.; Hilker, T.; Hermosilla, T.; Hobart, G.W.; Coops, N.C. Integrating Landsat pixel composites and change metrics with lidar plots to predictively map forest structure and aboveground biomass in Saskatchewan, Canada. Remote Sens. Environ. 2016, 176, 188–201. [Google Scholar] [CrossRef]
- Feng, Q.; Liu, J.; Gong, J. UAV Remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Bonnet, S.; Lisein, J.; Lejeune, P. Comparison of UAS photogrammetric products for tree detection and characterization of coniferous stands detection and characterization of coniferous stands. Int. J. Remote Sens. 2017, 38, 5310–5337. [Google Scholar]
- Messinger, M.; Asner, G.P.; Silman, M. Rapid assessments of Amazon forest structure and biomass using small unmanned aerial systems. Remote Sens. 2016, 8, 615. [Google Scholar] [CrossRef]
- Cunliffe, A.M.; Brazier, R.E.; Anderson, K. Ultra-fine grain landscape-scale quantification of dryland vegetation structure with drone-acquired structure-from-motion photogrammetry. Remote Sens. Environ. 2016, 183, 129–143. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion”photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 1–19. [Google Scholar] [CrossRef] [PubMed]
- USDA Forest Service. Field Instructions for the Annual Inventory of Alaska. Available online: https://www.fs.fed.us/pnw/rma/fia-topics/documentation/field-manuals/documents/Annual/2017_%20AFSL_FIA_Field_Manual.pdf. (accessed on 3 March 2018).
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Dalponte, M.; Ørka, H.O.; Ene, L.T.; Gobakken, T.; Næsset, E. Tree crown delineation and tree species classification in boreal forests using hyperspectral and ALS data. Remote Sens. Environ. 2014, 140, 306–317. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of deciduous tree species from time series of unmanned aerial system imagery. PLoS ONE 2015, 10, 1–20. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Ferraz, A.; Bretar, F.; Jacquemoud, S.; Gonçalves, G.; Pereira, L.; Tomé, M.; Soares, P. 3-D mapping of a multi-layered Mediterranean forest using ALS data. Remote Sens. Environ. 2012, 121, 210–223. [Google Scholar] [CrossRef]
- Breidenbach, J.; Næsset, E.; Lien, V.; Gobakken, T.; Solberg, S. Prediction of species specific forest inventory attributes using a nonparametric semi-individual tree crown approach based on fused airborne laser scanning and multispectral data. Remote Sens. Environ. 2010, 114, 911–924. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating individual trees in a savanna woodland using small footprint lidar data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and lidar data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Alonzo, M.; Roth, K.; Roberts, D. Identifying Santa Barbara’s urban tree species from AVIRIS imagery using canonical discriminant analysis. Remote Sens. Lett. 2013, 4. [Google Scholar] [CrossRef]
- Cook, B.D.; Nelson, R.F.; Middleton, E.M.; Morton, D.C.; McCorkel, J.T.; Masek, J.G.; Ranson, K.J.; Ly, V.; Montesano, P.M. NASA Goddard’s LiDAR, hyperspectral and thermal (G-LiHT) airborne imager. Remote Sens. 2013, 5, 4045–4066. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.E.; Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å. Identifying species of individual trees using airborne laser scanner. Remote Sens. Environ. 2004, 90, 415–423. [Google Scholar] [CrossRef]
- Korpela, I.; Ole Ørka, H.; Maltamo, M.; Tokola, T.; Hyyppä, J. Tree species classification using airborne LiDAR—Effects of stand and tree parameters, downsizing of training set, intensity normalization, and sensor type. Silva. Fenn. 2010, 44, 319–339. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data. Remote Sens. Environ. 2012, 123, 258–270. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. Geosci. Remote Sens. IEEE Trans. 2008, 46, 1416–1427. [Google Scholar] [CrossRef]
- Jones, T.G.; Coops, N.C.; Sharma, T. Assessing the utility of airborne hyperspectral and LiDAR data for species distribution mapping in the coastal Pacific Northwest, Canada. Remote Sens. Environ. 2010, 114, 2841–2852. [Google Scholar] [CrossRef]
- Hudak, A.T.; Crookston, N.L.; Evans, J.S.; Falkowski, M.J.; Smith, A.M.S.; Gessler, P.E.; Morgan, P. Regression modeling and mapping of coniferous forest basal area and tree density from discrete-return lidar and multispectral satellite data. Can. J. Remote Sens. 2006, 32, 126–138. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Elev. Range (m) | Slope | Aspect | Forest Type | AGB (Mg∙ha−1) |
|---|---|---|---|---|---|
| BZ3 | 238–244 | Low | N/A | White spruce/birch | 13 |
| BZ4 | 166–189 | 35% | East | White spruce/birch/aspen | 84 |
| BZ5 | 120–121 | Low | N/A | Black spruce | 1.5 |
| BZ6 | 431–455 | 37% | North | Black spruce | 37 |
| BZ7 | 198–205 | 10% | East | White spruce/birch | 89 |
| Variable Name | Description | Used for |
|---|---|---|
| ht_max | Max tree height | Species classification, DBH model (needleleaf) |
| ht_med(_sp) | Percentile heights of SfM points in crown segment | Leaf type classification |
| ht_75p(_sp) | Crown volume model | |
| ht_90p(_sp) | Leaf type classification | |
| ht_98p(_sp) | Species classification; Subplot-level TD estimate | |
| ht_mean(_sp) | Mean height of SfM points in crown | |
| ht_skw_sp | Subplot skewness of SfM point height distribution | Subplot-level BA estimate |
| ht_kurt_sp | Subplot kurtosis of SfM point height distribution | |
| cbh | Crown base height | DBH model (broadleaf) |
| wid_at_med | Widths of crown at percentile heights | Crown volume model |
| wid_at_75p | DBH model (needleleaf) | |
| wid_at_90p | ||
| wid_at_98p | Species classification; Leaf type classification | |
| blue_mean | mean, median, standard deviation, skewness of [blue − green]/[blue + green] | |
| blue_med | Species classification | |
| blue_std | ||
| blue_skw | ||
| green_mean | mean, median, standard deviation, skewness of [green − red]/[green + red] | |
| green_med | ||
| green_std | ||
| green_skw | ||
| bright_mean | mean, median, standard deviation, skewness of [blue + green + red] | |
| bright_med | ||
| bright_std |
| TD (trees·ha−1) | BA (m2·ha−1) | AGB (Mg·ha−1) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Field | UAV | Error | err % | Field | UAV | Error | err % | Field | UAV | Error | err % | |
| Birch | 155.8 | 229.9 | 74.1 | 48% | 2.0 | 3.5 | 1.4 | 71% | 7.8 | 11.5 | 3.7 | 47% |
| Aspen | 89.9 | 117.3 | 27.4 | 30% | 1.7 | 1.7 | 0.0 | −2% | 5.2 | 11.4 | 6.2 | 118% |
| White spr. | 347.5 | 285.1 | −62.4 | −18% | 6.3 | 4.8 | −1.5 | −24% | 24.4 | 12.2 | −12.2 | −50% |
| Black spr. | 885.5 | 893.6 | 8.1 | 1% | 2.8 | 3.1 | 0.4 | 13% | 7.7 | 7.4 | −0.3 | −4% |
| Total | 1478.6 | 1525.9 | 47.3 | 3% | 12.8 | 13.1 | 0.2 | 2% | 45.1 | 42.5 | −2.6 | −6% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alonzo, M.; Andersen, H.-E.; Morton, D.C.; Cook, B.D. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests 2018, 9, 119. https://doi.org/10.3390/f9030119
Alonzo M, Andersen H-E, Morton DC, Cook BD. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests. 2018; 9(3):119. https://doi.org/10.3390/f9030119
Chicago/Turabian StyleAlonzo, Michael, Hans-Erik Andersen, Douglas C. Morton, and Bruce D. Cook. 2018. "Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion" Forests 9, no. 3: 119. https://doi.org/10.3390/f9030119
APA StyleAlonzo, M., Andersen, H.-E., Morton, D. C., & Cook, B. D. (2018). Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests, 9(3), 119. https://doi.org/10.3390/f9030119