Abstract
The smart energy system, viewed as an “Energy Internet”, consists of the intelligent integration of decentralized sustainable energy sources, efficient distribution, and optimized power consumption. That implies the fault diagnosis for a smart energy system should be of low complexity. In this paper, we propose a Strong Tracking Unscented Kalman Filter () and modified Bayes’ classification-based Modified Three Sigma test (), abbreviated as , for smart energy networks. The theoretical analysis and simulations indicate that detects faults with a high accuracy and a low complexity of .
1. Introduction
The components a smart city include smart infrastructure, smart buildings, smart transportation, smart energy, smart health care, smart technology, smart governance, smart education, and smart citizens [1,2,3,4,5], among which the concept of smart energy can be viewed as an “Energy Internet” model [6,7,8,9,10,11]. The backbone of a smart energy system is the smart energy grid, the smart energy metering of which is an important component. For example, the smart meter records consumption of electric energy in certain time intervals and communicates that information to the utility for monitoring and billing. To ensure a green model for smart cities [12], minimal energy consumption is required. To serve such a purpose, fault diagnosis in green smart cities should be efficient in low complexity [13,14,15].
There exist many filter-based fault diagnosis algorithms specifically designed for nonlinear time-varying stochastic systems. In Reference [16], Ma et al. proposed a fault-related parameter estimation method based on a strong tracking filter for state assessment, as well as a logistic regression algorithm for root cause classification. In Reference [17], Daroogheh et al. designed a particle filter-based dual estimation strategy for both time-varying parameters and states. In Reference [18], Yin and Zhou proposed an intelligent particle filter to solve the problem of misleading state estimation due to the particle impoverishment. They designed a genetic-operators-based strategy to improve the particle diversity. Zhao et al. [19] developed an optimal unbiased finite impulse response filter, the estimator of which is used to minimize the mean square error subject to the unbiasedness constraint. In Reference [20], He et al. used the residual signal to detect sensor bias faults first and then employed residual analysis for faults isolation. Ge et al. [21] studied a performance comparison of the strong tracking filter and Kalman filter. In Reference [22], Zhao et al. designed an adaptive robust square-root cubature Kalman filter () with the noise statistic estimator to solve the decline or divergence problem of the accuracy of the . Residual test is a system-level fault detection algorithm [23] that can judge whether a set of measurement information in the Kalman filter system is effective in real time, based on which interactive residual fault detection method was proposed to identify both hard and soft faults, which are similar to the jump type fault and the soft fault, respectively. Huang and He [24] utilized two Bernoulli random variables to model the dead-zone effect. In addition, a Tobit Kalman filter is brought forward to generate a residual that can indicate the occurrence of an intermittent fault. The time-domain uncensored Kalman filter state estimation methodology is applied to address short circuit faults and transient load conditions [25]. On the other hand, researchers have been working on non-filter-based fault diagnosis algorithms for decades. Lau et al. [26] proposed a centralized diagnosis algorithm based on end-to-end transmission time, and then they employed the Bayes’ classification to improve the diagnosis accuracy. In Reference [27], Nandi et al. used the Pearson test to find faulty nodes within a square grid based network. Gong et al. [28] proposed an optimal deducing model to locate faulty nodes based on the return message from the sink node. Jiang [29] developed a two-phase fault detection algorithm based on the majority voting. Panda and Khilar [30] applied a three Sigma test to locate faulty nodes. In Reference [31], Sharma et al. proposed a decentralized algorithm based on spatio-temporal correlation. In Reference [32], Swain et al. integrated the network cut set and majority voting to detect the faulty nodes. Recently, Samuel et al. [33] presented the design of a sliding mode and an unknown input observer for Takagi-Sugeno systems to deal with the problem of inexact measurements of the premise variables. In Reference [34], a data-driven system based on PCA was designed to detect and quantify fluid leaks in an experimental pipeline.
Although these fault diagnosis approaches are able to detect certain industrial system faults, it remains a challenge to design a fault diagnosis model that meets practical production requirements [35,36,37]. In addition, how to accurately detect faults with a low complexity is still a challenge.
Our Contribution
In this paper, we propose a novel low-complexity algorithm named for fault detection in smart cities, which consists of a Strong Tracking Unscented Kalman Filter (), a Modified Bayes’ classification algorithm (), and a Modified Three Sigma test (), aimed to detect both of attenuation type faults and jump type faults. Besides, as a special case of the hypothesis test, can detect Byzantine faults [38]. Note that the message complexity of is such that the lifetime of a smart city network is extended. The details of our contributions are listed as follows:
- The , along with the , is applied to detect faulty cluster-heads in a centralized manner with a high accuracy; meanwhile, the messages exchanged are no more than such that the corresponding energy cost is reduced.
- We develop to determine the faulty state of every cluster-member within each cluster of a faulty cluster-head, while the cluster with a fault-free cluster-head can easily make a decision by simply comparing the data between the cluster-head and cluster-members. By doing so, the diagnosis accuracy is increased significantly, and the message complexity, which is only , implies that the energy cost is further reduced.
The rest of the paper is organized as follows. The system model and notions are given in Section 2. The strategies are elaborated in Section 3. Section 4 gives the theoretical analysis on the performance of the . The validation results are presented in this section, as well. We conclude this paper in Section 5.
2. System Model
In this paper, a fault diagnosis model that meets practical production requirements for smart energy network of smart city is considered. The discrete state-space model of which is given as follows:
where is a discrete time variable, is a state vector, is an output vector, and denote nonlinear transition functions, and and are uncorrelated, zero-mean, Gaussian white noises with covariance and , respectively. The meter of the smart energy network records consumption of electric energy in certain time intervals and communicates that information to the utility for monitoring and billing. Based on the normal and observed values of different meters, the data is modeled as a normal distribution with specific mean and standard deviation. Due to the harsh environment, each meter may malfunction with a probability p. In this paper, we aim to solve the fault detection problem with a high accuracy and a low message complexity in a nonlinear time-varying stochastic system. All symbols and descriptions throughout the paper are given in Table 1.

Table 1.
Notions.
3. The Proposed Strategy
We consider a clustered smart energy network in this paper. Instead of testing each meter, we perform a centralized testing on cluster-heads only. Then, the fault state of cluster-members can be verified by corresponding fault-free cluster-heads in a decentralized manner. To be more specific, the works in three phases. In the first phase, finds the Minimal Dominating Set () of the network such that each dominator serves as a cluster-head while the corresponding dominatees become cluster-members. During the phase two, applys both and to detect the faulty cluster-heads in a centralized manner. In the last phase, an is developed to determine the fault state of each cluster-member for decentralized fault diagnosis.
3.1. - and -based Centralized Fault Diagnosis
In this section, we introduce the faulty cluster-heads detection algorithm, which is the second phase of the . Specifically, we apply an -based joint estimation method to predict the state and parameter of each cluster-head first; then, the is adopted to find the faulty ones.
3.1.1. -based State Prediction
First, we introduce fault state related time-varying parameter . Then, joint estimation requires (1) to be rewritten as:
By applying joint estimation of states and parameters, faulty states can be detected. Then, we extent state, noise, and transition as follows:
Substituting Equations (3)–(6) into Equation (2) yields:
It is worth mentioning that can be predicted by [39].
3.1.2. -based Faulty Cluster-Heads Identification
Once we obtain , the is applied to find the faulty cluster-heads. First, we assume obeys the normal distribution when the system is fault-free, which is . If the system suffers from the parameter exception, it can be determined by the following hypothesis test, where is fault-free if holds; otherwise, is faulty.
where
To be more specific, for each , the MB is applied to determine the faulty state of . The meter suffers from the parameter bias fault at , only if there exists a such that holds. For the jump type fault, we need to obtain an accurate fault amplitude as follows. If there exists an integer such that for each , , we have
then, at , the fault amplitude of is estimated to be
Note that if a smaller is chosen, then faults can be more accurately estimated, which requires much more time, and vice-versa.
3.2. Modified Three Sigma Rule-based Fault Diagnosis
In this section, the modified three sigma rule is introduced first, based on which the corresponding decentralized fault diagnosis is given.
The data sensed by can be measured by taking both estimated mean and standard deviation of the data collected from neighbors. Let represent the ratio between its deviation to the estimated mean and standard deviation as follows:
According to the three sigma rule, if , then is considered as faulty; otherwise, is fault-free. However, this rule is unable to detect faulty meters within a lower degree network. The reason is listed as follows. If there exist two suspicious meters and such that , then may be considered fault-free, which is called the “masking” [30]. To solve such a problem, the Median () of the data and the Median Absolute Deviation () are applied, instead of the and , respectively. This is because the actual data value deviate from the faulty meter readings such that the - and -based fault detecting schemes can achieve better accuracy in results. Then, we give the modified three sigma rule as follows.
For a data set sorted in an ascending order, we have
The is defined as follows:
In fact, only the normalized , which is
is suitable to replace Standard Deviation () [30]. Then, the absolute error for the modified three sigma test is defined as follows:
It is apparent that the modified three sigma rule defers from the original one only in the choice of the absolute error.
Next, we give the corresponding decentralized fault diagnosis algorithm as follows:
Step 1: For each cluster with a fault-free cluster-head , if , then is fault-free; otherwise, is faulty.
Step 2: For each cluster with a faulty cluster-head , the is applied to such that the fault state of each cluster-member within is detected.
By doing so, we can determine the fault states of at least meters, where △ represents the maximum degree of graph G. The theoretical analysis on the diagnosis accuracy and message complexity is given in the next section.
4. Performance Analysis
4.1. Theoretical Analysis
In this section, we analyze the performance of the in terms of: (I) Detection Accuracy (abbreviated as , which is the ratio between number of faulty meters detected as faulty and the total number of faulty meters); (II) False Alarm Rate (abbreviated as , which is the number of fault-free meters detected as faulty to the total number of fault-free meters); (III) False Positive Rate (abbreviated as , which is the ratio of the number of faulty meters detected as fault-free to the total number of faulty meters); and (IV) message complexity.
Let be the probability of a meter being faulty, p be the probability that a faulty meter detected as fault-free, and denote the accuracy of the , respectively. Then, the following three theorems hold.
Theorem 1.
The of the proposed algorithm is
Proof.
The detects faulty meters in two phases. In the first phase, there are up to fault-free cluster-heads detected along with faulty ones. That implies there are at most faulty cluster-members correctly diagnosed within corresponding clusters. According to the modified sigma rule, it is apparent that, if , then the detection accuracy is according to the of the three sigma test given by Panda [38], which is
That suggests we can correctly detect faulty cluster-members. Therefore, the of is deduced as
where [40], n denotes the number of meters, and the minimum and the maximum degree of graph G is denoted by and △, respectively. □
Theorem 2.
The of the algorithm is
Proof.
Similar to the proof of Theorem 5.1, the can correctly detect up to faulty cluster-heads. With the help of fault-free cluster-heads, there are at most faulty cluster-members detected as faulty ones. According to literature [38], the of the three sigma test is
Therefore, we can deduce that the of the is
□
Theorem 3.
The for the algorithm is
Proof.
Similar to the proofs of previous theorems, there are up to fault-free cluster-heads correctly detected by the . That implies the fault states of corresponding cluster-members, which are as many as meters, are easily verified. The of the three sigma test is given in Reference [38] as follows:
There is no doubt that the of the is
□
Theorem 4.
The message complexity of the algorithm is .
Proof.
Since the is a two-phase strategy, we analyze the complexity of each phase to prove this theorem. Since the centralized diagnosis part of the requires sampling, the corresponding message complexity depends on the number of sample, which equals to the data window . In fact, the data window can be chosen as a constant such that the number of messages exchanged is less than . That implies complexity of the centralized part of the is . On the other hand, for an -based strategy, each fault-free obtains the broadcasting data of every cluster-member, while meters within each of a faulty broadcast data to each other. That implies the complexity of the decentralized part of the is . Therefore, the message complexity of the is no more than . □
It is obvious that is low-complexity when compared with contemporaneous fault diagnosis algorithms.
4.2. Validation Experiment
The performance of the is given in this section. First, the diagnosis accuracy for faulty cluster-header detection utilizing and only is validated through experiments. Then, we compare the with the existing DFD [30], Jiang [28], and DSFD [38] in terms of detection accuracy (), false positive rate (), and false alarm rate (), respectively.
The resistor of a meter easily suffers from the jump type fault. Suppose the resistor gets faulty at . Let , , , , , and .
Figure 1 and Figure 2 show that the fault is detected at and it is isolated at with the fault amplitude equal to . That implies the detection accuracy is about .
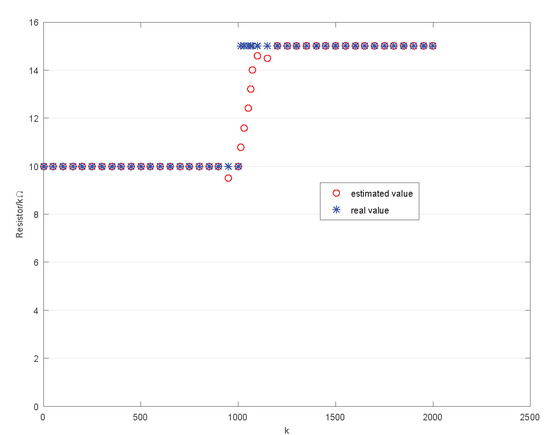
Figure 1.
Real value vs. estimated value of Strong Tracking Unscented Kalman Filter () for jump type fault.
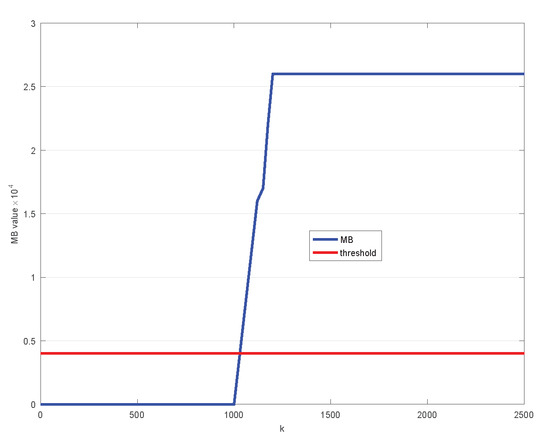
Figure 2.
and Modified Bayes’ classification algorithm ()-based detection for jump type fault.
The capacitor is subject to the attenuation type fault, which is a case of the incipient fault. Now, we show the proposed strategy can detect the attenuation type fault. Let , , , . Suppose the degradation of the capacitor begins with at .
Figure 3 and Figure 4 show that, the attenuation type fault has been detected at about with the magnitude about . That implies the detection accuracy is .
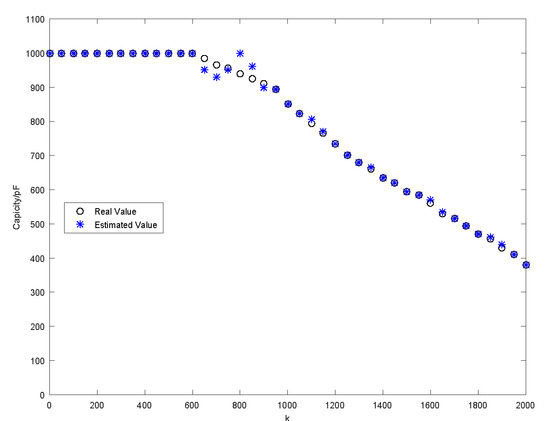
Figure 3.
Real value vs. estimated value of for attenuation type fault.
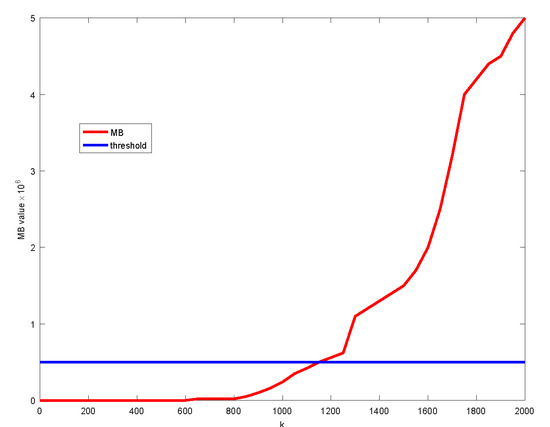
Figure 4.
and -based detection for attenuation type fault.
In Figure 5, it is clear that the detection accuracy of each strategy drops with the increase of the fault probability. However, the achieves higher detection accuracy than the others.
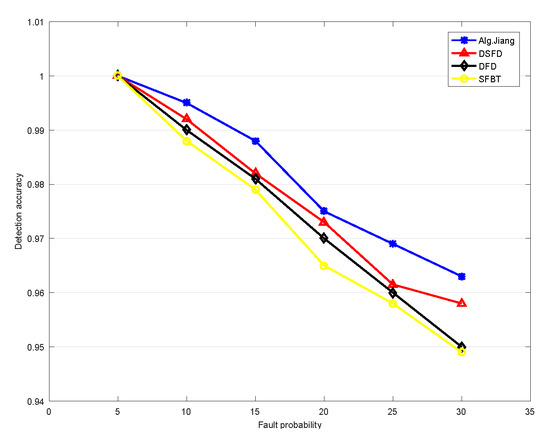
Figure 5.
Detection accuracy comparison.
Although the false alarm rate and the false positive rate increase with the fault probability (see Figure 6 and Figure 7), the still outperforms baseline approaches.
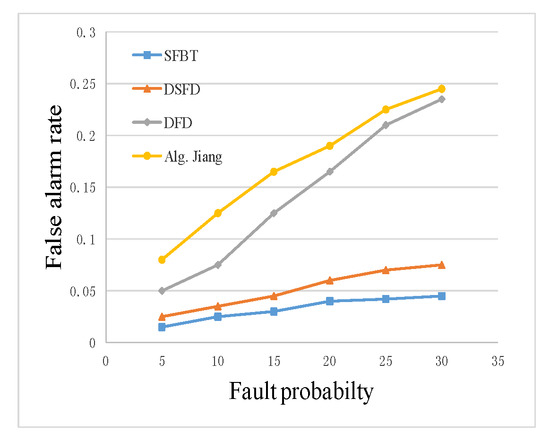
Figure 6.
False alarm rate comparison.
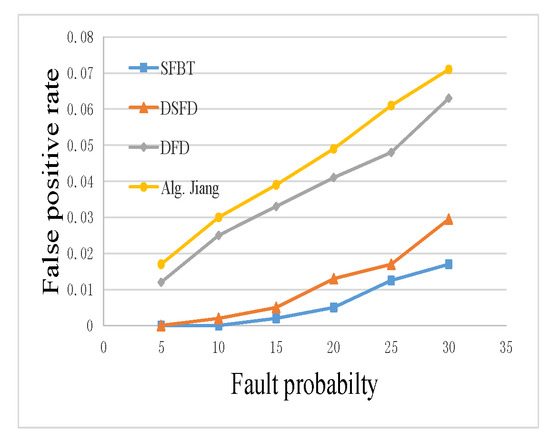
Figure 7.
False positive rate comparison.
To sum up, the performs better than DFD [41], Jiang [29], and DSFD [30] in terms of detection accuracy, false positive rate, and false alarm rate, respectively. The reason for that is the employs fault-free cluster-heads, which are located by the strong tracking UKF and the modified Bayes’ classification algorithm, to detect the fault states of cluster-members through the modified three sigma test.
5. Conclusions
The optimized power consumption for a smart energy system of a smart city is crucial. Although a variety of fault diagnosis algorithms have been developed, how to efficiently detect faults with low complexity poses a great challenge. To this end, we propose the that works on a clustered network. It first applies a strong tracking () and a modified Bayes’ classification algorithm () to detect fault-free cluster-heads in a centralized manner. Then, a decentralized modified three Sigma test () is developed to identify faulty cluster-members to overcome the “masking” problem within the cluster with a faulty cluster-head. Besides, a faulty-free cluster-head can detect any faulty cluster-member by simply comparing the data of its own and the one of the cluster-member. The theoretical analysis and experiment results indicate that the achieves higher diagnosis accuracy over some contemporary strategies with a complexity of .
In fact, each faulty free cluster-head detected by the is only one hop away from corresponding cluster-members. That suggests data collected by the cluster-head do not differ much from that of cluster-members, which makes the three Sigma test work. However, by doing so, more cluster-heads are required. Thus, our future work includes how to detect faulty cluster-members at least two hops away with a complexity no more than .
Author Contributions
Conceptualization, J.W.; methodology, H.Z. (Hua Zhang); software, D.L.; validation, H.F.; formal analysis, T.W.; investigation, H.Z. (Hongyan Zhang); writing—review and editing, X.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Nature Science Foundation of China under Nos.61702103, 61871204, 61702103, and 61703195, Industrial Robot Application of Fujian University Engineering Research Center (Minjiang University) under No. MJUKF-IRA1906, Guiding Project of Fujian Science and Technology Department under No.2019H0026, Fujian Science and Technology Department Project under Nos.2017J01768 and 2017J01506, Fujian Natural Science Foundation Grant No. 2019J01756, and Fuzhou Technology Planning Program Grant No.2018-G-96.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, K.; Gu, L.; He, X.; Guo, S.; Sun, Y.; Vinel, A.; Shen, J. Distributed energy management for vehicle-to-grid networks. IEEE Netw. 2017, 31, 22–28. [Google Scholar] [CrossRef]
- Hu, X.; Wang, K.; Liu, X.; Sun, Y.; Li, P.; Guo, S. Energy management for EV charging in software-defined green vehicle-to-grid network. IEEE Commun. Mag. 2018, 56, 156–163. [Google Scholar] [CrossRef]
- Xu, C.; Wang, K.; Li, P.; Xia, R.; Guo, S.; Guo, M. Renewable energy-aware big data analytics in geo-distributed data centers with reinforcement learning. IEEE Trans. Netw. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Wang, K.; Ouyang, Z.; Krishnan, R.; Shu, L.; He, L. A game theory based energy management system using price elasticity for smart grids. IEEE Trans. Ind. Inform. 2015, 11, 1607–1616. [Google Scholar] [CrossRef]
- Wang, K.; Wang, Y.; Sun, Y.; Guo, S.; Wu, J. Green industrial Internet of Things architecture: an energy-efficient perspective. IEEE Commun. Mag. 2016, 54, 48–54. [Google Scholar] [CrossRef]
- Mohanty, S.P.; Uma, C.; Elias, K. Everything you wanted to know about smart cities: The internet of things is the backbone. IEEE Consum. Electron. Mag. 2016, 5, 60–70. [Google Scholar] [CrossRef]
- Wang, K.; Yu, J.; Yu, Y.; Qian, Y.; Zeng, D.; Guo, S.; Xiang, Y.; Wu, J. A survey on Energy Internet: architecture, approach and emerging technologies. IEEE Syst. J. 2018, 12, 2403–2416. [Google Scholar] [CrossRef]
- Wang, K.; Hu, X.; Li, H.; Li, P.; Zeng, D.; Guo, S. A survey on energy Internet communications for sustainability. IEEE Trans. Sustain. Comput. 2017, 2, 231–254. [Google Scholar] [CrossRef]
- Wang, K.; Li, H.; Feng, Y.; Tian, G. Big data analytics for system stability evaluation strategy in the energy Internet. IEEE Trans. Ind. Inform. 2017, 13, 1969–1978. [Google Scholar] [CrossRef]
- Gao, M.; Wang, K.; He, L. Probabilistic model checking and scheduling implementation of energy router system in energy internet for green cities. IEEE Trans. Ind. Inform. 2018, 14, 1501–1510. [Google Scholar] [CrossRef]
- He, X.; Wang, K.; Huang, H.; Liu, B. QoE-driven big data architecture for smart city. IEEE Commun. Mag. 2018, 56, 88–93. [Google Scholar] [CrossRef]
- Maksimovic, M. Greening the Future: Green Internet of Things (G-IoT) as a Key Technological Enabler of Sustainable Development. In Internet of Things and Big Data Analytics Toward Next-Generation Intelligence; Springer: Berlin, Germany, 2018; pp. 283–313. [Google Scholar]
- Wang, K.; Shao, Y.; Xie, L.; Wu, J.; Guo, S. Adaptive and fault-tolerant data processing in healthcare iot based on fog computing. IEEE Trans. Netw. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Wang, K.; Shao, Y.; Shu, L.; Zhu, C.; Zhang, Y. Mobile big data fault-tolerant processing for eHealth networks. IEEE Netw. 2016, 30, 1–7. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, K.; Lin, Y.; Xu, W. LightChain: a lightweight blockchain system for industrial internet of things. IEEE Trans. Ind. Inform. 2019, 15, 3571–3581. [Google Scholar] [CrossRef]
- Ma, J.; Lu, C.; Liu, H. Fault Diagnosis for the Heat Exchanger of the Aircraft Environmental Control System Based on the Strong Tracking Filter. PLoS ONE 2015, 10, e0122829. [Google Scholar] [CrossRef]
- Daroogheh, N.; Meskin, N.; Khorasani, K. A Dual Particle Filter-Based Fault Diagnosis Scheme for Nonlinear Systems. IEEE Trans. Control Syst. Technol. 2017, 26, 1317–1334. [Google Scholar] [CrossRef]
- Yin, S.; Zhu, X. Intelligent Particle Filter and Its Application on Fault Detection of Nonlinear System. IEEE Trans. Ind. Electron. 2015, 62, 3852–3861. [Google Scholar] [CrossRef]
- Zhao, S.; Shmaliy, Y.; Liu, F. Fast Kalman-Like Optimal Unbiased FIR Filtering with Applications. IEEE Trans. Signal Process. 2016, 64, 2284–2297. [Google Scholar] [CrossRef]
- He, X.; Wang, Z.; Liu, Y.; Qin, L.; Zhou, D. Fault Tolerant Control for an Internet-Based Three-Tank System: Accommodation to Sensor Bias Faults. IEEE Trans. Ind. Electron. 2016, 64, 2266–2275. [Google Scholar] [CrossRef]
- Ge, Q.; Shao, T.; Chen, S.; Wen, C. Carrier Tracking Estimation Analysis by Using the Extended Strong Tracking Filtering. IEEE Trans. Ind. Electron. 2017, 64, 1415–1424. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Yu, T.; Jian, H.; Liu, T. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator. Appl. Math. Comput. 2015, 256, 352–367. [Google Scholar] [CrossRef]
- Zhang, L.; Cui, Y.; Xiong, Z.; Liu, J.; Lai, J.; Lv, P. Research on Adaptive Multi-Source Information Fault-Tolerant Navigation Method Based on No-Reference System Diagnosis. Sensors 2019, 19, 2911. [Google Scholar] [CrossRef]
- Huang, J.; He, X. Detection of Intermittent fault for discrete-time systems with output dead-zone: a variant Tobit Kalman filtering approach. J. Control Sci. Eng. 2017, 2017, 9. [Google Scholar] [CrossRef]
- Cisneros-Magaña, R.; Medina, A.; Anaya-Lara, O. Time-domain voltage sag state estimation based on the unscented Kalman filter for power systems with nonlinear components. Energies 2018, 11, 1411. [Google Scholar]
- Lau, B.C.; Ma, E.W.; Chow, T.W. Probabilistic fault detector for wireless sensor network. Expert Syst. Appl. 2014, 41, 3703–3711. [Google Scholar] [CrossRef]
- Nandi, M.; Nayak, A.; Roy, B.; Sarkar, S. Hypothesis testing and decision theoretic approach for fault detection in wireless sensor networks. Int. J. Parallel Emerg. Distrib. Syst. 2015, 30, 262–285. [Google Scholar] [CrossRef][Green Version]
- Gong, W.; Liu, K.; Liu, Y. Directional diagnosis for wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2015, 26, 1290–1300. [Google Scholar] [CrossRef]
- Jiang, P. A new method for node fault detection in wireless sensor networks. Sensors 2009, 9, 1282–1294. [Google Scholar] [CrossRef]
- Panda, M.; Khilar, P.M. Distributed self fault diagnosis algorithm for large scale wireless sensor networks using modified three sigma edit test. Ad Hoc Netw. 2015, 25, 170–184. [Google Scholar] [CrossRef]
- Sharma, K.P.; Sharma, T.P. rDFD: reactive distributed fault detection in wireless sensor networks. Wirel. Netw. 2016, 23, 1145–1160. [Google Scholar] [CrossRef]
- Swain, R.R.; Dash, T.; Khilar, P.M. An effective graph-theoretic approach towards simultaneous detection of fault(s) and cut(s) in wireless sensor networks. Int. J. Commun. Syst. 2017, 30, e3273. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; Valencia-Palomo, G.; López-Estrada, F.R.; Astorga-Zaragoza, C.-M.; Osornio-Rios, R.A.; Santos-Ruiz, I. Sensor fault diagnosis based on a H∞ sliding mode and unknown input observer for takagi-sugeno systems with uncertain premise variables. Asian J. Control 2019, 21, 339–353. [Google Scholar]
- Santos-Ruiz, I.D.L.; López-Estrada, F.R.; Puig, V.; Pérez-Pérez, E.J.; Mina-Antonio, J.D.; Valencia-Palomo, G. Diagnosis of Fluid Leaks in Pipelines Using Dynamic PCA. IFAC-PapersOnLine 2018, 51, 373–380. [Google Scholar] [CrossRef]
- Yi, J.; Huang, D.; He, H.; Zhou, W.; Han, Q.; Li, T. A novel framework for fault diagnosis using kernel partial least squares based on an optimal preference matrix. IEEE Trans. Ind. Electron. 2017, 64, 4315–4324. [Google Scholar] [CrossRef]
- Jiang, G.; He, H.; Xie, P.; Tang, Y. Stacked multilevel-denoising autoencoders: A new representation learning approach for wind turbine gearbox fault diagnosis. IEEE Transt. Instrum. Meas. 2017, 66, 2391–2402. [Google Scholar] [CrossRef]
- Yi, J.; Huang, D.; Fu, S.; He, H.; Li, T. Optimized relative transformation matrix using bacterial foraging algorithm for process fault detection. IEEE Trans. Ind. Electron. 2016, 63, 2595–2605. [Google Scholar] [CrossRef]
- Panda, M.; Khilar, P.M. Distributed Byzantine fault detection technique in wireless sensor networks based on hypothesis testing. Comput. Electr. Eng. 2015, 48, 270–285. [Google Scholar] [CrossRef]
- Deng, F.; Yang, H.; Wang, L. Adaptive Unscented Kalman Filter Based Estimation and Filtering for Dynamic Positioning with Model Uncertainties. Int. J. Control Autom. Syst. 2019, 17, 667–678. [Google Scholar] [CrossRef]
- Clark, W.E.; Shekhtman, B.; Suen, S.; Fisher, D.C. Upper bounds for the domination number of a graph. Congr. Numer. 1998, 132, 99–123. [Google Scholar]
- Panda, M.; Khilar, P.M. Distributed soft fault detection algorithm in wireless sensor networks using statistical test. In Proceedings of the 2012 2nd IEEE International Conference on Parallel, Distributed and Grid Computing, Solan, India, 6–8 Decemebr 2012. [Google Scholar]







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).