
An Analysis on Contemporary MAC Layer Protocols in Vehicular Networks: State-of-the-Art and Future Directions

 , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
1.1. Paper Contribution
1.2. Paper Organization
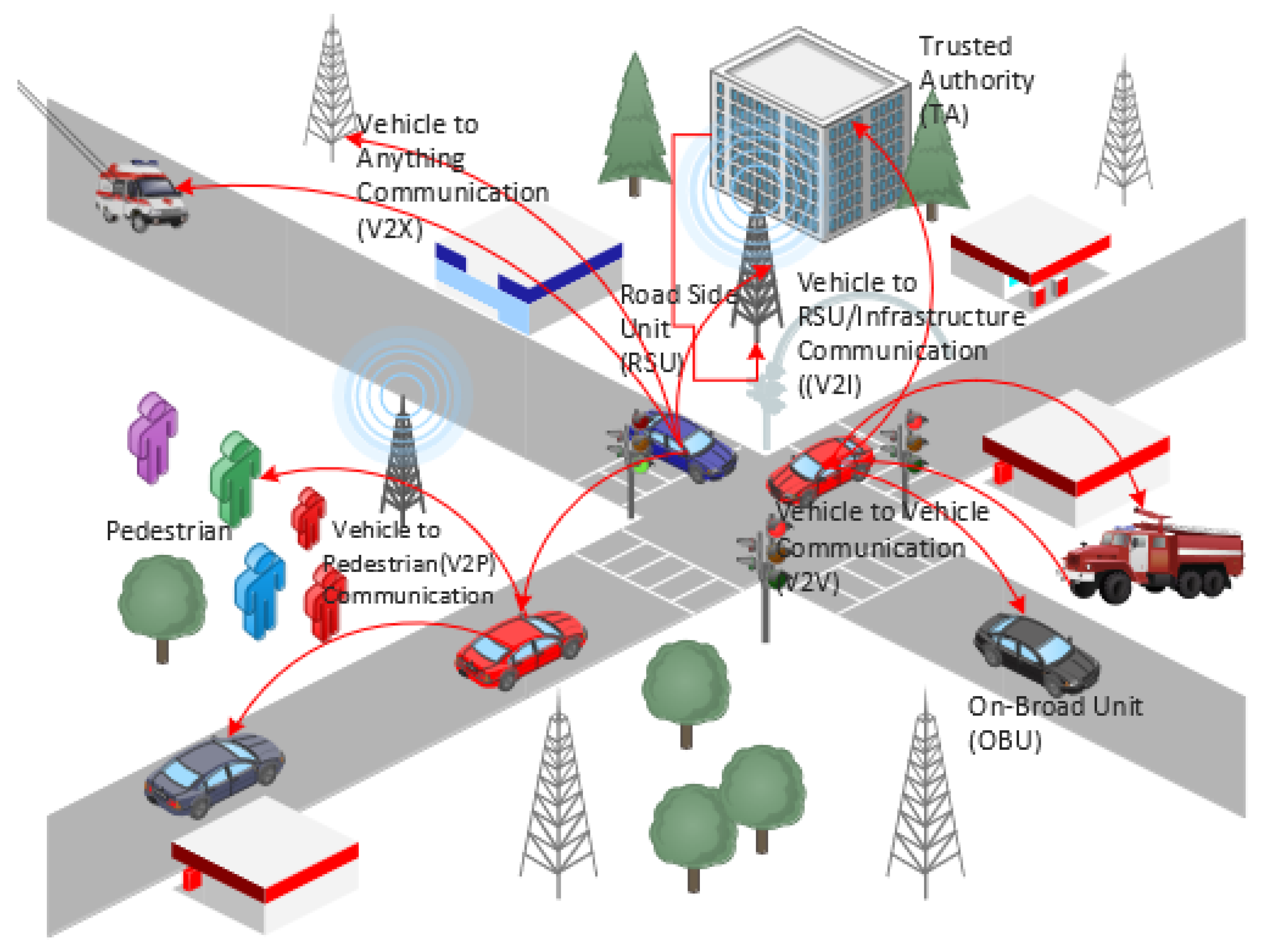
2. Vehicular Networks
2.1. DSRC-Based Networks
2.2. Cellular-Based Networks
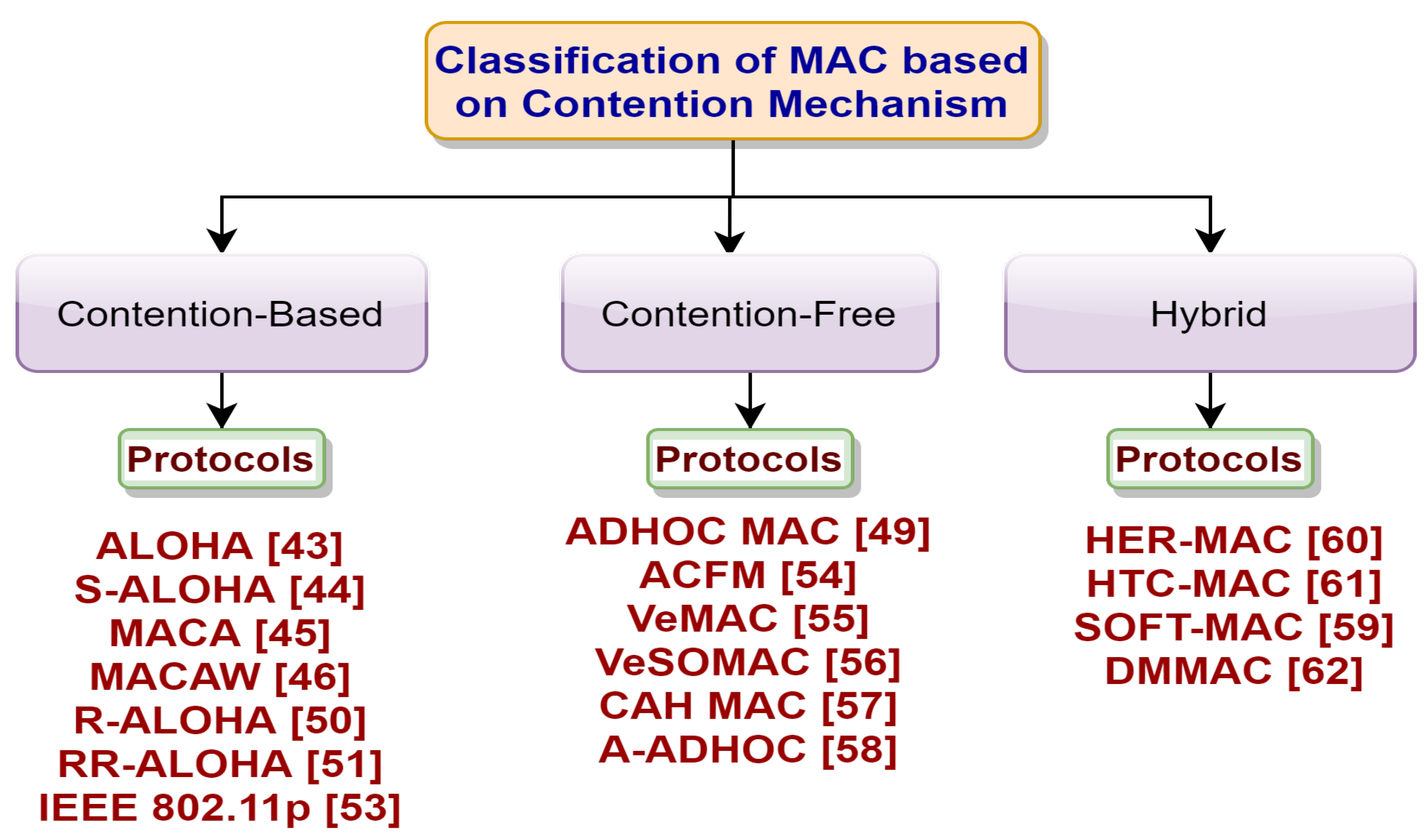
3. MAC Classification in VANETs Based on Contention Mechanism
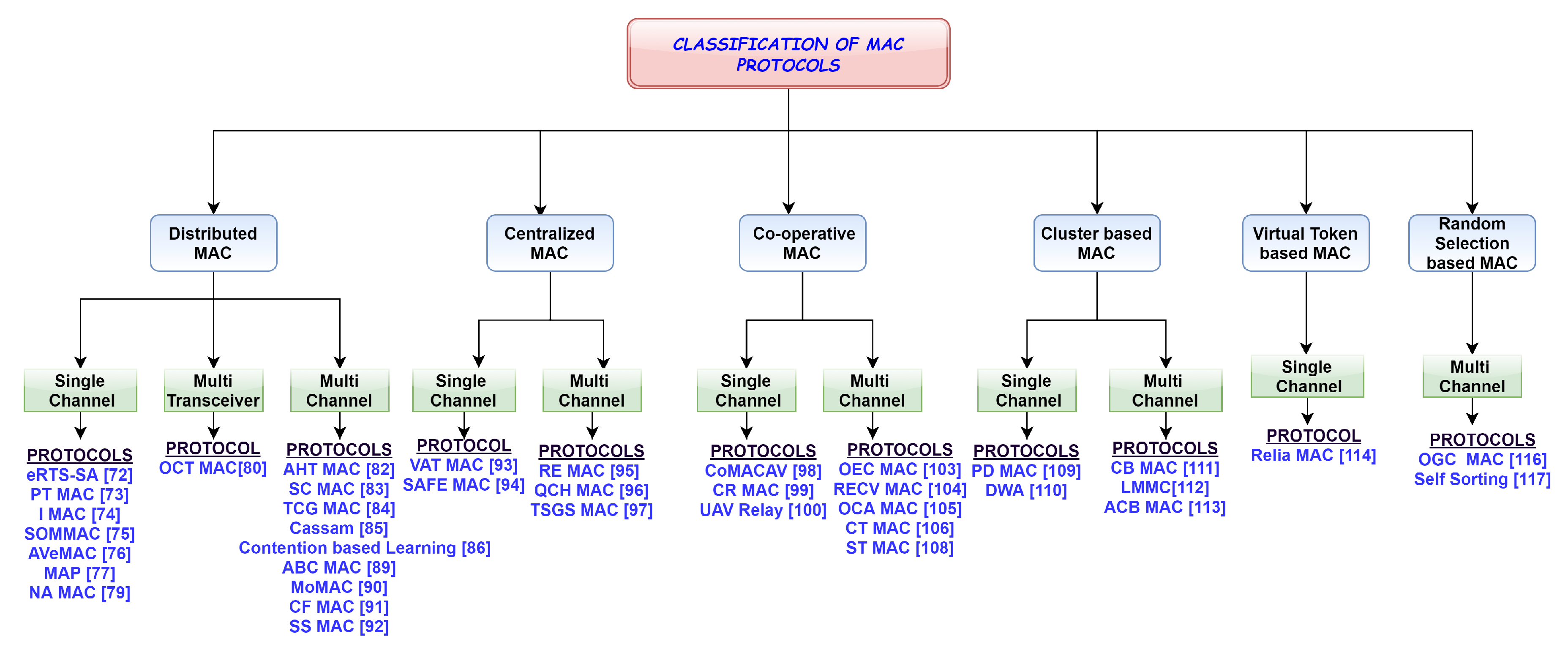
4. Classification of MAC Protocols Based on Channel
4.1. Distributed Single-Channel MAC Protocols
4.1.1. eRTS-SA
4.1.2. PTMAC
4.1.3. I-MAC
4.1.4. SOMMAC
4.1.5. AVeMAC
4.1.6. MAP
4.1.7. NA MAC
4.2. Distributed Multi-Transceiver MAC Protocols
OCT MAC
4.3. Distributed Multi-Channel MAC Protocols
4.3.1. AHT MAC
4.3.2. SCMAC
4.3.3. TCG MAC
4.3.4. CaSSaM
4.3.5. Contention-Based Learning MAC Protocol
4.3.6. ABC MAC
4.3.7. MoMAC
4.3.8. CF MAC
4.3.9. SS MAC
4.4. Centralized Single-Channel MAC Protocols
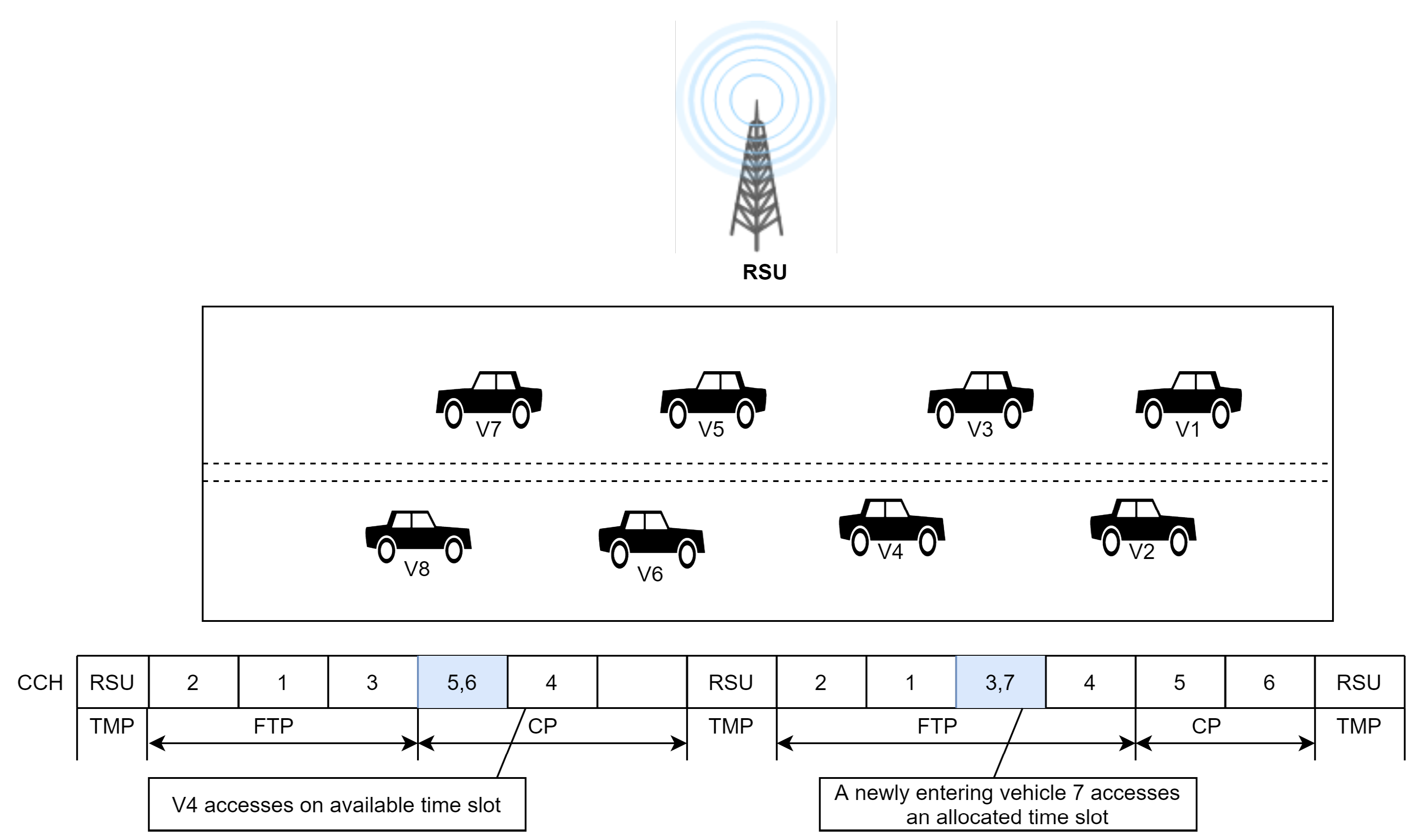
4.4.1. VAT MAC
4.4.2. SAFE MAC
4.5. Centralized Multi-Channel MAC Protocols
4.5.1. ReMAC
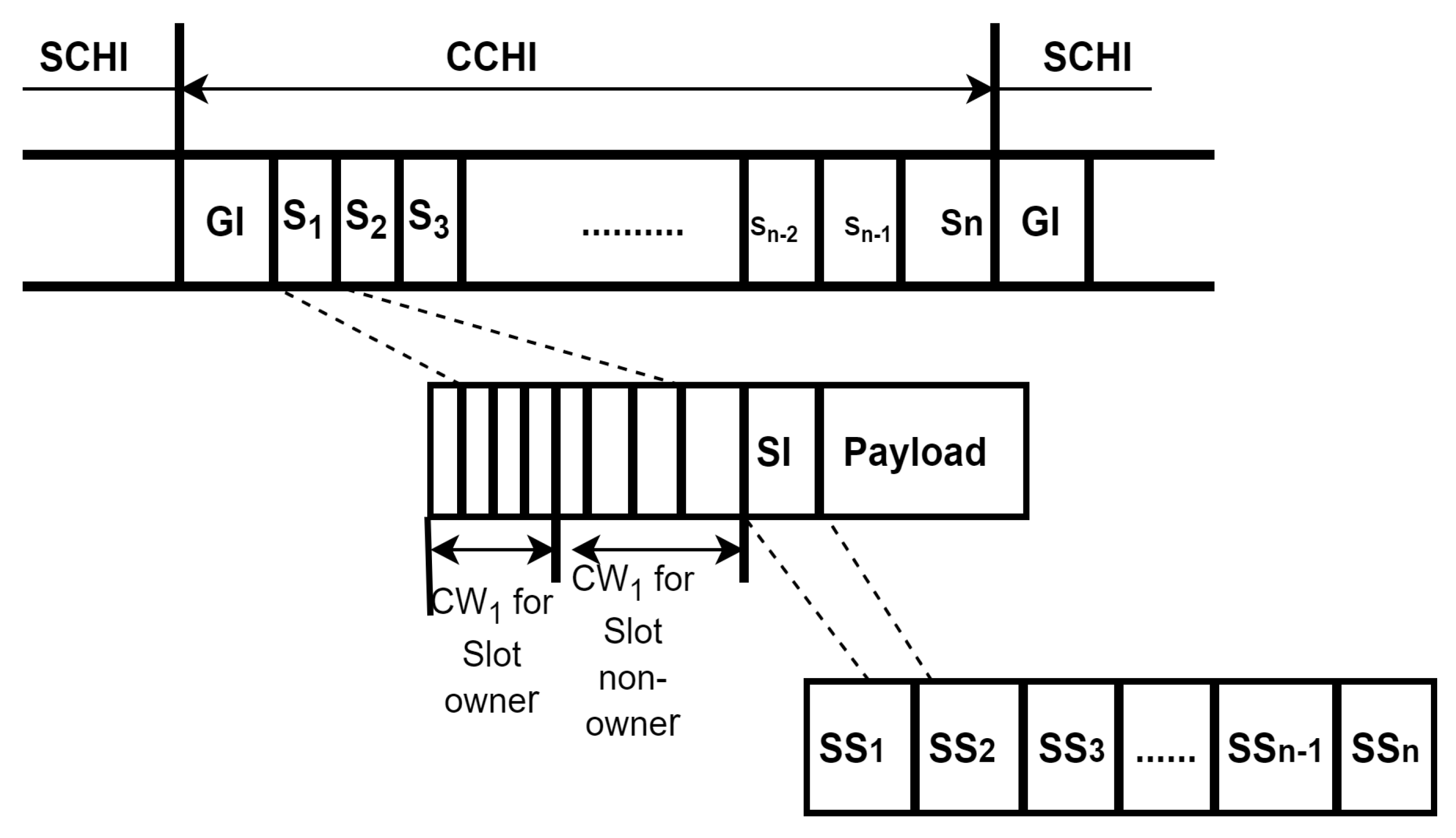
4.5.2. QCH MAC
4.5.3. TSGS MAC
4.6. Cooperative Single-Channel MAC Protocols
4.6.1. CoMACAV
4.6.2. CRMAC
4.6.3. UAV Relay
4.7. Cooperative Multi-Channel MAC Protocols
4.7.1. OEC MAC
4.7.2. RECV-MAC
4.7.3. OCA-MAC
4.7.4. CT MAC
4.7.5. ST MAC
4.8. Cluster-Based Single-Channel MAC Protocols
4.8.1. PDMAC
4.8.2. Enhanced IEEE 802.15.4
4.9. Cluster-Based Multi-Channel MAC Protocols
4.9.1. CB MAC
4.9.2. LMMC
4.9.3. ACB MAC
4.10. Virtual Token Based
Reliable MAC
4.11. Random Selection Based
4.11.1. OGC MAC
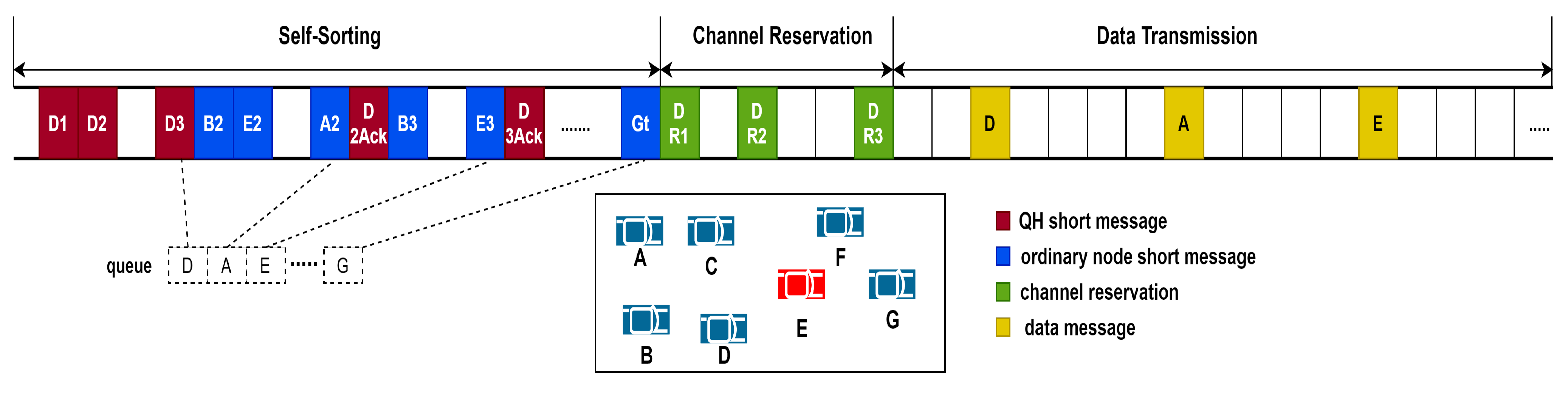
4.11.2. Self-Sorting-Based MAC
5. Future Scope, Open Challenges, and Research Direction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Acronym | Description | Acronym | Description |
| 3GPP | Third Generation Partnership Project | AB HARQ | Adaptive Byte-Level Hybrid Automatic Repeat reQuest |
| ABC MAC | Adaptive Beacon Control MAC | AC | Access Category |
| ACB MAC | Authentication Cluster-Based MAC | ACFM | Adaptive Collision-Free MAC |
| ACK | Acknowledgment | AHT MAC | Adaptive High-Throughput MAC |
| ASAS | Adaptive TDMA Slot Assignment Strategy | AVeMAC | Adaptive Vehicular MAC |
| BB MAC | Black Burst MAC | BEB | Binary Exponent Back-Off |
| BER | Bit Error Rate | BFP | Broadcast Feedback Phase |
| BSS | Basic Service Set | BT | Broadcast Table |
| BTMA | Busy Tone Multiple Access | CAC MAC | Cellular Automata to Form CAR MAC |
| CAH MAC | Cooperative Ad Hoc MAC | CAM | Cooperation Acceptance Message |
| CAP | Contention Access Phase | CaSSaM | Context Aware System for Safety Messages |
| CB MAC | Cluster-Based MAC | CBCH | Contention-Based Sub-Channel |
| CBP | Contention-Based Period | CBR | Channel Busy Rate |
| CCH | Control Channel | CDMA | Code Division Multiple Access |
| CF MAC | Collision-Free MAC | CFP | Contention-Free Phase |
| CFP | Contention-Free Period | CFR MAC | Collision-Free Reservation MAC |
| CH | Cluster Head | CI | Control Interval |
| CoMACAV | Cooperative MAC for Autonomous Vehicle | CR | Cooperative Relaying |
| CRM | Cooperation Request Message | CRMAC | Cooperative Relay-Based MAC |
| CRP | Channel Request Packet | CSMA/CA | Carrier Sense Multiple Access/Collision Avoidance |
| CT MAC | Cooperative TDMA MAC | CTS | Clear To Send |
| C-V2X | Cellular-Vehicle-to-Everything | CW | Contention Window |
| CWSA | Cooperative Wave Service Advertisement | CWSA | Cooperative Wave Service Advertisement |
| D2D | Device-to-Device | DBCC | Distributed Beacon Congestion Control |
| DBRA | Distributed Beacon Rate Adaptive | DCF | Distributed Coordination Function |
| DIFS | Dynamic Inter-Frame Spacing | DMMAC | Dedicated Multi-Channel MAC |
| DNS | Direct Neighbor Set | DSRC | Dedicated Short-Range Communication |
| DT | Direct Transmission | DT MAC | Distributed TDMA MAC |
| DTA | Data Transmission Acceptance | DTB MAC | Dynamic Token-Based MAC |
| DTR | Data Transmission Request | DTSS | Distributed Time Slot Sharing |
| DWA | Dynamic-Window Algorithm | EDCA | Enhanced Distributed Channel Access |
| eRTS-SA | Request Transmission Split- Slotted ALOHA | ETCM | Enhanced TDMA Cluster-Based MAC |
| ETSI | European Telecommunications Standards Institute | FCC | Federal Communication Commission |
| FDMA | Frequency Division Multiple Access | FI | Frame Information |
| GPS | Global Positioning System | HBCH | Heart-Beat Channel |
| HC MAC | Hybrid CSMA MAC | HER MAC | Hybrid Efficient and Reliable MAC |
| I MAC | Improvised MAC | IBT | Initial Broadcast Table |
| INS | Indirect Neighbor Set | IR | Interference Range |
| ITS | Intelligent Transportation System | JNCH | Joining Network Channel |
| KTH | Keen To Help | LIMERIC | Linear Message Rate Control Algorithm |
| LMA | Location and Mobile Aware MAC | LMMC | Learning Automata Multi-Channel MAC |
| LTE | Long-Term Evolution | MAC | Media Access Control |
| MACA | Multiple Access with Collision Avoidance | MACAW | Multiple Access with Collision Avoidance Wireless |
| MANET | Mobile Ad Hoc Network | MAP | Medium Access for PLNC (Physical Layer Network Coding) |
| mBS | Micro Base Station | MCBC | Multi-Carrier Burst Contention |
| MC-MAC | Multi-Code Media Access Control | MEC | Multi-Access Edge Computing |
| MHR | Multi-Hop Relaying | MoMAC | Mobility-Aware MAC |
| NA MAC | Neighbor Association-Based MAC | NACK | Non-Acknowledgement |
| NAV | Network Allocation Vector | NEMO | Network Mobility |
| NC-MAC | Network Coding MAC | OBU | On-Board Unit |
| OCA MAC | Optimal Cooperative Ad Hoc MAC | OCC | Optimal Orthogonal Codes |
| OCT MAC | Optical CDMA with TDMA MAC | OEC MAC | OFDMA-Based Efficient Cooperative MAC |
| OFDMA | Orthogonal Frequency Division Multiplexing Access | OGC MAC | OFDM-Based Group Contention MAC |
| OppCast | Opportunistic Broadcast | OR | Offer to Relay |
| ORM | Optimal Relay Message | PCF | Point-Coordination Function |
| PDMAC | Priority-Based Enhanced TDMA MAC | ProSe | Proximity Service |
| PHC | Policy Hill Climbing | PLNC | Physical Layer Network Coding |
| PPS | Pulse Per Second | PTMAC | Prediction-Based TDMA MAC |
| QCH MAC | QoS-Aware Centralized Hybrid | QoS | Quality of Service |
| RACK | Relay Acknowledgement | RCLM | Request to Cluster Merging |
| RCR | Relay Clear to Relay | RECV MAC | Reliable and Efficient Cooperative MAC |
| Relia MAC | Reliable MAC | ReMAC | Reliable MAC |
| ReTCL | Registration To CLuster | RIFF | Random Index Fit First |
| RP | Reservation Period | RRR | Relay Ready to Relay |
| RRTS | Relay Request To Send | RSU | Road-Side Unit |
| RSUHB | RSU Heart-Beat | RTCF | Request To Cluster Formation |
| RTS | Request To Send | SAFE MAC | Speed Aware Fairness-Enabled MAC |
| SB-SPS | Sensing Based Semi-Persistent Scheduling | SCCH | Scheduling Channel |
| SCH | Service Channel | SCHI | Service Channel Interval |
| SCMAC | Slotted Contention-Based MAC | SDMA | Spatial Division Multiple Access |
| SDN | Software Defined Network | SHM | Selector Helper Message |
| SIC | Successive Interference Cancellation | SIFS | Short Inter-Frame Space |
| SINR | Signal to Interference Noise Ratio | SNR | Signal-to-Noise Ratio |
| SOFT MAC | Space-Orthogonal Frequency Time MAC | SOMMAC | Self-Organizing Multi-Channel MAC |
| SR MAC | Simple Relay-Enabled MAC | SRBs | Service Resource Blocks |
| SS MAC | Slot Sharing MAC | ST MAC | spatio-temporal Coordination-Based MAC |
| STC | spatio-temporal Coordination | TC MAC | TDMA Cluster-Based MAC |
| TCG MAC | TDMA with CSMA MAC | TDMA | Time Division Multiple Access |
| TP | Transmission Period | TR | Transmission Range |
| TSGS MAC | Transmission Scheduling Greedy Search | UAV MAC | Unmanned Aerial Vehicle MAC |
| V2I | Vehicle-to-Infrastructure Communication | V2V | Vehicle-to-Vehicle Communication |
| VANET | Vehicular Ad Hoc Network | VAT MAC | Novel Adaptive TDMA MAC |
| VCAT | Vehicle Channel Allocation Table | VHB | Vehicle Heart-Beat |
| VoLTE | Voice-Over Long-Term Evolution | VSIP | Vehicular Specific Packet type |
| WAVE | Wireless Access in Vehicular Environment | WPCF | WAVE PCF |
| WSA | WAVE Service Advertisement | WTI | Willing To Involve |
| WTS | Want To Send |
References
- Maalej, Y.; Abderrahim, A.; Guizani, M.; Hamdaoui, B.; Balti, E. Advanced Activity-Aware Multi-channel Operations 1609.4 in VANETs for Vehicular Clouds. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; Volume 4, pp. 142–149. [Google Scholar]
- Kakarla, J.; Sathya, S.S. A Survey and Qualitative Analysis of Multi-channel MAC Protocols for VANET. Int. J. Comput. Appl. 2012, 38, 0975-8887. [Google Scholar] [CrossRef]
- AlMheiri, M.S.; AlQamzi, S.H. MANETs and VANETs Clustering Algorithms: A Survey. In Proceedings of the 8th IEEE GCC Conference and Exhibition, Muscat, Oman, 1–4 February 2015; pp. 1–4. [Google Scholar]
- Gillani, S.; Shah, A.P.; Qayyum, A.; Hasbullah, B.H. MAC Layer Challenges and Proposed Protocols for Vehicular Adhoc Networks. Adv. Intell. Syst. Comput. 2015, 306, 3–13. [Google Scholar] [CrossRef]
- Sheikh, S.M.; Liang, J. A Comprehensive Survey on VANET Security Services in Traffic Management System. Wirel. Commun. Mob. Comput. 2019, 2019, 2423915. [Google Scholar] [CrossRef] [Green Version]
- Sheikh, S.M.; Liang, J.; Wang, W. A Survey of Security Services, Attacks, and Applications for Vehicular Ad Hoc Networks (VANETs). Sensors 2019, 19, 3589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kelarestaghi, B.K.; Mahsa Foruhandeh, M.; Heaslip, K.; Gerdes, R. Survey on Vehicular Ad Hoc Networks and Its Access Technologies Security Vulnerabilities and Countermeasures. arXiv 2019, arXiv:1903.01541. [Google Scholar]
- Dhamgaye, A.; Chavhan, N. Survey on security challenges in VANET. Int. J. Comput. Sci. Netw. 2013, 2, 2277–5420. [Google Scholar]
- Fuentes, D.J.; Manzano, G.L.; González-Tablas, I.A.; Blasco, J. Security models in vehicular ad-hoc networks: A survey. IETE Tech. Rev. 2014, 31, 47–64. [Google Scholar] [CrossRef]
- Hadded, M.; Muhlethaler, P.; Laouiti, A.; Zagrouba, R.; Saidane, A.L. TDMA-based MAC protocols for vehicular ad hoc networks: A survey, qualitative analysis, and open research issues. IEEE Commun. Surv. Tutor 2015, 17, 2461–2492. [Google Scholar] [CrossRef] [Green Version]
- Mohammed, A.M.; Al-Daraiseh, A.A. Toward secure vehicular adhoc networks: A survey. IETE Tech. Rev. 2012, 29, 80–89. [Google Scholar]
- Choi, J.; Marojevic, V.; Carl, B.; Dietrich, B.C.; Reed, H.J.; Ahn, S. Survey of Spectrum Regulation for Intelligent Transportation Systems. IEEE Access 2020, 8, 140145–140160. [Google Scholar] [CrossRef]
- Nguyen, V.; Kim, T.T.O.; Pham, C.; Oo, Z.T.; Tran, H.T.; Hong, S.C.; Huh, N.E. A survey on adaptive multi-channel MAC protocols in VANETs using Markov models. IEEE Access 2018, 6, 16493–16514. [Google Scholar] [CrossRef]
- Khan, A.U.; Lee, S.S. Multi-Layer Problems and Solutions in VANETs: A Review. Electronics 2019, 8, 204. [Google Scholar] [CrossRef] [Green Version]
- Teixeira, F.A.; Silva, V.F.; Leoni, J.L.; Macedo, D.F.; Nogueira, J.M. Vehicular networks using the IEEE 802.11p standard: An experimental analysis. Veh. Commun. 2014, 1, 91–96. [Google Scholar] [CrossRef]
- Kiela, K.; Barzdenas, V.; Jurgo, M.; Macaitis, V.; Rafanavicius, J.; Vasjanov, A.; Kladovscikov, L.; Navickas, R. Review of V2X–IoT Standards and Frameworks for ITS Applications. Appl. Sci. 2020, 10, 4314. [Google Scholar] [CrossRef]
- Kim, J.W.; Kim, J.W.; Jeon, D.K. A Cooperative Communication Protocol for QoS Provisioning in IEEE 802.11p/Wave Vehicular Networks. Sensors 2018, 18, 3622. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, Y.; Rao, L.; Liu, X. Performance and Reliability Analysis of IEEE 802.11p Safety Communication in a Highway Environment. IEEE Trans. Veh. Technol. 2013, 62, 4198–4212. [Google Scholar] [CrossRef]
- Nardini, G.; Virdis, A.; Campolo, C.; Molinaro, A.; Stea, G. Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors 2018, 18, 1527. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bai, F.; Krishnan, H. Reliability Analysis of DSRC Wireless Communication for Vehicle Safety Applications. In Proceedings of the IEEE Conference on Intelligent Transportation Systems—ITSC, Toronto, ON, Canada, 17–20 September 2006; pp. 355–362. [Google Scholar] [CrossRef]
- Gast, S.M. 802.11 Wireless Networks: The Definitive Guide; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2002; ISBN 9780596100520. Available online: http://196.223.158.148/bitstream/handle/123456789/2499/E302.pdf?sequence=1&isAllowed=y (accessed on 8 November 2021).
- Reddy, G.R.; Ramanathan, R. An Empirical study on MAC layer in IEEE 802.11p/ WAVE based Vehicular Ad hoc Networks. In Proceedings of the 8th International Conference On Advances in Computing & Communications (ICACC), Kochi, India, 13–15 September 2018; Volume 143, pp. 720–727. [Google Scholar] [CrossRef]
- Liu, W.; He, X.; Huang, Z.; Ji, Y. Transmission Capacity Characterization in VANETs with Enhanced Distributed Channel Access. Electronics 2019, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- 3GPP Release 14. Available online: https://www.3gpp.org/release-14 (accessed on 1 September 2021).
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L.; Li, W. A Vision of C-V2X: Technologies, Field Testing, and Challenges With Chinese Development. IEEE IoT J. 2020, 7, 3872–3881. [Google Scholar] [CrossRef] [Green Version]
- Katranaras, E.; Dillinger, M.; Abbas, T.; Theillaud, R.; Calvo, J.L.; Zang, Y. Standardization and Regulation. In Cellular V2X for Connected Automated Driving; John Wiley Sons, Ltd.: Hoboken, NJ, USA, 2021; Chapter 3; pp. 63–90. [Google Scholar] [CrossRef]
- McCarthy, B.; Burbano-Abril, A.; Rangel-Licea, V.; O’Driscoll, A. OpenCV2X: Modelling of the V2X Cellular Sidelink and Performance Evaluation for Aperiodic Traffic. arXiv 2021, arXiv:2103.13212. [Google Scholar]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Ali, G.G.M.N.; Pesch, D.; Xiao, P. A Survey on Resource Allocation in Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2020, 2020, 3019322. [Google Scholar] [CrossRef]
- Mosavat-Jahromi, H.; Li, Y.; Cai, L.; Lu, L. NC-MAC: Network Coding-based Distributed MAC Protocol for Reliable Beacon Broadcasting in V2X. In Proceedings of the GLOBECOM 2020—IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Saifuddin, M.; Zaman, M.; Toghi, B.; Fallah, Y.P.; Rao, J. Performance Analysis of Cellular-V2X with Adaptive and Selective Power Control. arXiv 2020, arXiv:2008.03453. [Google Scholar]
- Abdel Hakeem, S.A.; Hady, A.A.; Kim, H. 5G-V2X: Standardization, architecture, use cases, network-slicing, and edge-computing. Wirel. Netw. 2020, 26, 6015–6041. [Google Scholar] [CrossRef]
- Bazzi, A.; Berthet, A.O.; Campolo, C.; Masini, B.M.; Molinaro, A.; Zanella, A. On the Design of Sidelink for Cellular V2X: A Literature Review and Outlook for Future. IEEE Access 2021, 9, 97953–97980. [Google Scholar] [CrossRef]
- Boban, M.; Kousaridas, A.; Manolakis, K.; Eichinger, J.; Xu, W. Use Cases, Requirements, and Design Considerations for 5G V2X. arXiv 2017, arXiv:1712.01754. [Google Scholar]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; ¸Sahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Tassi, A.; Egan, M.; Piechocki, R.J.; Nix, A. Modeling and Design of Millimeter-Wave Networks for Highway Vehicular Communication. IEEE Trans. Veh. Technol. 2017, 66, 10676–10691. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.K.; Nandi, S.K.; Nandi, S. A tutorial survey on vehicular communication state of the art, and future research directions. Veh. Commun. 2019, 18, 100164. [Google Scholar] [CrossRef]
- Rebei, A.; Hadded, M.; Touati, H.; Boukhalfa, F.; Muhlethaler, P. MAC-aware Routing Protocols for Vehicular Ad Hoc Networks: A Survey. In Proceedings of the International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Shukla, N.; Katiyar, P.; Devgan, N.; Kumar, N.; Dinker, G.A. Comparison of the MAC Protocols in Vehicular Ad-Hoc Network. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 6709. [Google Scholar]
- Jayaraj, V.; Hemanth, C.; Sangeetha, R.G. A survey on hybrid MAC protocols for vehicular ad-hoc networks. Veh. Commun. 2016, 6, 29–36. [Google Scholar] [CrossRef]
- Huang, J.; Li, Q.; Zhong, S.; Liu, L.; Zhong, P.; Wang, J.; Ye, J. Synthesizing Existing CSMA and TDMA Based MAC Protocols for VANETs. Sensors 2017, 17, 338. [Google Scholar] [CrossRef] [PubMed]
- Menouar, H.; Filali, F.; Lenardi, M.E. A Survey and Qualitative Analysis of MAC Protocols for Vehicular Ad Hoc Networks. IEEE Wirel. Commun. 2006, 13, 30–35. [Google Scholar] [CrossRef]
- Jurdak, R.; Lopes, V.C.; Baldi, P. A Survey, Classification and Comparative Analysis of Medium Access Control Protocols for Ad Hoc Networks. IEEE Commun. Surv. 2004, 6, 2–16. [Google Scholar] [CrossRef]
- Karn, P. MACA-A New Channel Access Method for Packet Radio. In Proceedings of the ARRL/CRRL Amateur Radio 9th Computer Networking Conference, London, ON, Canada, 22 September 1990; pp. 134–140. [Google Scholar]
- Bargrodia, R.; Demers, A.; Shenker, S.; Zhang, L. MACAW: A Media Access Protocol for Wireless LAN’s. In Proceedings of the Conference on Communications Architectures, Protocols and Applications, London, UK, 31 August–2 September 1994; pp. 212–225. [Google Scholar]
- Tobagi, A.F.; Kleinrock, L. Packet Switching in Radio Channels: Part II—The Hidden Terminal Problem in Carrier Sense Multiple-Access and the Busy-Tone Solution. IEEE Trans. Commun. 1975, 23, 1417–1433. [Google Scholar] [CrossRef]
- Jin, T.K.; Cho, H.D. Multi-Code MAC for Multi-Hop Wireless Ad hoc Networks. IEEE Vehic. Tech. Conf. 2002, 2, 1100–1104. [Google Scholar]
- Borgonovo, F.; Capone, A.; Cesana, M.; Fratta, L. ADHOC MAC: A New MAC Architecture for Ad Hoc Networks Providing Efficient and Reliable Point-to-Point and Broadcast Services. Wirel. Netw. 2004, 10, 359–366. [Google Scholar] [CrossRef] [Green Version]
- Crowther, W.; Rettberg, R.; Walden, D.; Ornstein, S.; Heart, F. A System for Broadcast Communications: Reservation ALOHA. In Proceedings of the 6th Hawaii International Conference on Systems Sciences, Honolulu, HI, USA, 9–11 January 1973; pp. 596–603. [Google Scholar]
- Borgonovo, F.; Capone, A.; Cesana, M.; Fratta, L. RR-ALOHA, a Reliable R-ALOHA broadcast channel for ad-hoc inter-vehicle communication networks. In Proceedings of the Med-Hoc-Net, Sardegna, Italy, 4–6 September 2002; Available online: https://www.researchgate.net/publication/228598697 (accessed on 8 November 2021).
- Nasipuri, A.; Ye, S.; You, J.; Hiromoto, E.R. A MAC Protocol for Mobile Ad Hoc Networks Using Directional Antennas. In Proceedings of the Wireless Communications and Networking Conference, Chicago, IL, USA, 23–28 September 2000; Volume 1, pp. 1214–1219. [Google Scholar]
- 802.11p-2010. In IEEE Standard for Information Technology Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) and Physical Layer (PHY) Specifications Amendment 6; Wireless Access in Vehicular Environments Std. IEEE: Piscataway, NJ, USA, 2010.
- Guo, W.; Huang, L.; Chen, L.; Xu, H.; Xie, J. An adaptive collision-free MAC protocol based on TDMA for inter-vehicular communication. In Proceedings of the International Conference on Wireless Communications and Signal Processing (WCSP), Huangshan, China, 25–27 October 2012; pp. 1–6. [Google Scholar]
- Omar, A.H.; Zhuang, W. VeMAC: A TDMA-Based MAC Protocol for Reliable Broadcast in VANETs. IEEE Trans. Mob. Comput. 2013, 12, 1724–1736. [Google Scholar] [CrossRef] [Green Version]
- Yu, F.; Biswas, S. Self-configuring TDMA protocols for enhancing vehicle safety with DSRC based vehicle-to-vehicle communications. IEEE J. Sel. Areas Commun. 2007, 25, 1526–1537. [Google Scholar] [CrossRef]
- Bharati, S.; Zhuang, W. CAH-MAC: Cooperative ADHOC MAC for vehicular networks. IEEE J. Sel. Areas Commun. 2013, 31, 470–479. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Ren, F.; Miao, L.; Lin, C. A-ADHOC: An adaptive real-time distributed MAC protocol for Vehicular Ad Hoc Networks. Mob. Netw. Appl. 2011, 16, 576–585. [Google Scholar] [CrossRef]
- Abdalla, M.G.; Abu-Rgheff, A.M.; Senouci, M.S. Space-Orthogonal Frequency Time Medium Access Control(SOFT MAC) in VANET. In Proceedings of the IEEE Global Information Infrastructure Symposium, Hammemet, Tunisia, 23–26 June 2009; pp. 1–8. [Google Scholar]
- Dang, D.N.M.; Dang, H.N.; Nguyen, V.; Htike, Z.; Hong, C.S. HER-MAC: A hybrid efficient and reliable MAC for vehicular ad hoc networks. In Proceedings of the IEEE 28th International Conference on Advanced Information Networking and Applications, Victoria, BC, Canada, 13–16 May 2014; pp. 186–193. [Google Scholar]
- Nguyen, V.; Oo, T.Z.; Chuan, P.; Hong, C.S. An efficient time slot acquisition on the hybrid TDMA/CSMA multichannel MAC in VANETs. IEEE Commun. Lett. 2016, 20, 970–973. [Google Scholar] [CrossRef]
- Lu, N.; Ji, Y.; Liu, F.; Wang, X. A dedicated multi-channel MAC protocol design for VANET with adaptive broadcasting. In Proceedings of the IEEE Wireless Communication and Networking Conference, Sydney, NSW, Australia, 18–21 April 2010; pp. 1–6. [Google Scholar]
- Nguyen, V.; Pham, C.; Thant Zin Oo, Z.H.; Tran, H.N.; Huh, N.E.; Hong, S.C. MAC protocols with dynamic interval schemes for VANETs. Veh. Commun. 2018, 15, 4–62. [Google Scholar] [CrossRef]
- Mukhtaruzzaman, M.; Atiquzzaman, M. Clustering in VANET: Algorithms and Challenges. J. Comput. Electr. Eng. 2020, 88, 106851. Available online: https://arxiv.org/ftp/arxiv/papers/2009/2009.01964.pdf (accessed on 8 November 2021). [CrossRef]
- Chen, W.; Jia, J.; Du, X.; Zhang, Y.; Liu, K. A Clustering-Based Adaptive Multiple Access Protocol for Vehicular Ad Hoc Networks. In Proceedings of the International Conference on Communication Systems, Chengdu, China, 19–21 December 2018; pp. 463–467. [Google Scholar]
- Senouci, O.; Harous, S.; Aliouat, Z. Survey on vehicular ad hoc networks clustering algorithms: Overview, taxonomy, challenges, and open research issues. Int. J. Commun. Syst. 2020, 33, e4402. [Google Scholar] [CrossRef]
- Al-heety, S.O.; Zakaria, Z.; Ismail, M.; Shakir, M.M.; Alani, S.; Alsariera, H. A Comprehensive Survey: Benefits, Services, Recent Works, Challenges, Security, and Use Cases for SDN-VANET. IEEE Access 2020, 8, 91028–91047. [Google Scholar] [CrossRef]
- Jaballah, B.W.; Conti, M.; Lal, C. Software-Defined VANETs: Benefits, Challenges, and Future Directions, Networking and Internet Architecture. arXiv 2019, arXiv:1904.04577. [Google Scholar]
- Arena, F.; Pau, G.; Severino, A. A review on IEEE 802.11 p for intelligent transportation systems. J. Sens. Actuator Netw. 2020, 9, 22. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Peng, S.; Zhou, L.; He, X.; Du, J. GPS-aided inter-microcell interference avoidance for request-transmission splitting slotted ALOHA-based scheme in smart cities with connected vehicles. Future Gener. Comput. Syst. 2020, 108, 501–511. [Google Scholar] [CrossRef]
- Jiang, X.; Du, D.H.C. PTMAC: A Prediction-based TDMA MAC Protocol for Reducing Packet Collisions in VANET. IEEE Trans. Veh. Technol. 2016, 65, 9209–9223. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, J.; Wu, Y. A-VeMAC: An Adaptive Vehicular MAC Protocol for Vehicular Ad Hoc Networks. In Proceedings of the ICC—Ad-Hoc and Sensor Networks Symposium, Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Ndih, N.D.E.; Cherkaoui, S. Modulation Network Coding. IET Commun. 2013, 7, 1715–1728. [Google Scholar] [CrossRef] [Green Version]
- Ndih, N.D.E.; Cherkaoui, S. MAP: Contention-Free MAC protocol for VANETs with PLNC. In Proceedings of the ICC-2017 Mobile and Wireless Networking, Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Urmonov, O.; Kim, H. Highly Reliable MAC Protocol Based on Associative Acknowledgement for Vehicular Network. Electronics 2021, 10, 382. [Google Scholar] [CrossRef]
- Mao, Q.; Yue, P.; Xu, M.; Ji, Y.; Cui, Z. OCTMAC: A VLC Based MAC Protocol Combining Optical CDMA with TDMA for VANETs. In Proceedings of the International Conference on Computer, Information and Telecommunication Systems (CITS), Dalian, China, 21–23 July 2017; pp. 234–238. [Google Scholar]
- Guerra-Medina, F.M.; Rojas-Guillama, B.; Gonzalez, M.A.J.; Poves, E. Experimental optical code-division multiple access system for visible light communications. In Proceedings of the 2011 Wireless Telecommunications Symposium (WTS), New York, NY, USA, 13–15 April 2011; pp. 1–6. [Google Scholar]
- Cao, Y.; Zhang, H.; Fang, Y.; Yuan, D. An Adaptive High-Throughput Multi-Channel MAC Protocol for VANETs. IEEE Internet Things J. 2020, 7, 8249–8262. [Google Scholar] [CrossRef]
- Li, S.; Liu, Y.; Wang, J.; Ge, Y.; Deng, L.; Deng, W. TCGMAC: A TDMA-based MAC protocol with collision alleviation based on slot declaration and game theory in VANETS. Trans. Emerg. Telecommun. Technol. 2019, 30, e3730. [Google Scholar] [CrossRef]
- Yanez, A.; Cespedes, S.; Rubio-Loyola, J. CaSSaM: Context-aware System for Safety Messages Dissemination in VANETs. In Proceedings of the IEEE COLCOM, Medellin, Colombia, 16–18 May 2018; pp. 1–6, ISBN 978-1-5386-6820-7/18. [Google Scholar]
- Sutton, S.R.; Barto, G.A. Introduction to Reinforcement Learning, 1st ed.; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Watkins, H.C.J.C.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Zhou, H.; Qian, L.; Xu, W.; Li, M.; Shen, S.X. MoMAC: Mobility-Aware and Collision Avoidance MAC for Safety Applications in VANETs. IEEE Trans. Veh. Technol. 2018, 67, 10590–10602. [Google Scholar] [CrossRef]
- Samara, G. An Efficient Collision Free Protocol for VANET. Int. J. Comput. Appl. 2018, 180, 30–34. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Zhou, H.; Xu, W.; Zhang, N.; Li, M.; Shen, S.X. SS-MAC: A Novel Time Slot-Sharing MAC for Safety Messages Broadcasting in VANETs. IEEE Trans. Veh. Technol. 2018, 67, 3586–3597. [Google Scholar] [CrossRef]
- Cao, S.; Lee, S.C.V. A Novel Adaptive TDMA-Based MAC Protocol for VANETs. IEEE Commun. Lett. 2018, 22, 614–617. [Google Scholar] [CrossRef]
- Siddik, M.A.; Moni, S.S.; Alam, M.S.; Johnson, W.A. SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks. Sensors 2019, 19, 2405. [Google Scholar] [CrossRef] [Green Version]
- AĞGÜN, F.; Çibuk, M.; UR-Rehman, S. ReMAC: A novel hybrid and reservation-based MAC protocol for VANETs. Turk. J. Electr. Eng. Comput. Sci. 2020, 28, 1886–1904. [Google Scholar] [CrossRef]
- Boulila, N.; Hadded, M.; Laouiti, A.; Saidane, A.L. QCH-MAC: A Qosaware Centralized Hybrid MAC protocol for Vehicular Ad Hoc NETworks. In Proceedings of the 32nd International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018; pp. 55–62. [Google Scholar] [CrossRef]
- Karabulut, A.M.; Shahen Shah, M.F.A.; Ilhan, H. CR-MAC: Cooperative Relaying MAC Protocol for VANETs. In Proceedings of the Scientific Meeting on Electrical-Electronics and Biomedical Engineering and Computer Science (EBBT), Istanbul, Turkey, 24–26 April 2019; pp. 1–4, ISBN 978-1-7281-1013-4/19. [Google Scholar]
- Karabulut, A.M.; Shahen Shah, M.F.A.; İlhan, H. CoMACAV: Cooperative MAC Protocol for Autonomous Vehicles. In Proceedings of the IEEE International Symposium on Innovations in Intelligent SysTems and Applications (INISTA), Sofia, Bulgaria, 3–5 July 2019; pp. 1–8. [Google Scholar]
- Lu, X.; Xu, D.; Xiao, L.; Wang, L.; Zhuang, W. Anti-jamming communication game for UAV-aided VANETs. In Proceedings of the IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Benslimane, A.; Nguyen-Minh, H. Jamming attack model and detection method for beacons under multi-channel operation in vehicular networks. IEEE Trans. Veh. Technol. 2016, 66, 6475–6488. [Google Scholar] [CrossRef]
- Cormen, H.T.; Leiserson, E.C.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Jeong, J.; Shen, Y.; Sangsoo Jeong, S.; Lee, S.; Jeong, H.; Oh, J.; Park, T.; Ilyas, U.M.; Son, H.S.; Du, H.C.D. STMAC: Spatio-Temporal Coordination-Based MAC Protocol for Driving Safety in Urban Vehicular Networks. IEEE Trans. Intell. Transp. 2017, 19, 1520–1536. [Google Scholar] [CrossRef]
- Abbas, G.; Abbas, H.Z.; Haider, S.; Baker, T.; Boudjit, S.; Muhammad, F. PDMAC: A Priority-Based Enhanced TDMA Protocol for Warning Message Dissemination in VANETs. Sensors 2020, 20, 45. [Google Scholar] [CrossRef] [Green Version]
- Shahen Shah, M.F.A.; Ilhan, H.; Tureli, U. CB-MAC: A novel cluster-based MAC protocol for VANETs. IET Intell. Transp. Syst. 2019, 13, 587–595. [Google Scholar] [CrossRef]
- Daknou, E.; Tabbane, N.; Thaalbi, M. A MAC Multi-channel Scheme based on Learning Automata for Clustered VANETs. In Proceedings of the 32nd International Conference on Advanced Information Networking and Applications, Cracow, Poland, 16–18 May 2018; pp. 71–78. [Google Scholar]
- Aredla, J.; Zhang, S.; Liu, E. Relia-MAC: Timely and Reliable Communication for Safety Critical Applications of VANET. In Proceedings of the 25th International Conference on Automation and Computing, Lancaster University, Lancaster, UK, 5–7 September 2019; pp. 1–6. [Google Scholar]
- Roman, B.; Wassell, I.; Chatzigeorgiou, I. Scalable Cross-Layer Wireless Access Control Using Multi-Carrier Burst Contention. IEEE J. Sel. Areas Commun. 2011, 29, 113–128. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, H.; Wu, D.; Yuan, D. OGCMAC: A Novel OFDM based Group Contention MAC for VANET Control Channel. IEEE Trans. Wirel. Commun. 2017, 16, 5796–5809. [Google Scholar] [CrossRef]
- Shen, Z.; Zhang, X.; Zhang, M.; Li, W.; Yang, D. Self-Sorting Based MAC Protocol for High-Density Vehicular Ad Hoc Networks. IEEE Access 2017, 5, 7350–7361. [Google Scholar] [CrossRef]
- Peng, S.; Zhou, L.; He, X.; Du, J.; Guan, L.Y. A request-transmission splitting scheme for V2X networks: Design and throughput analysis. IEEE Access 2019, 7, 158317–158325. [Google Scholar] [CrossRef]
- Zhuo, X.; Hua, S.; Miao, L.; Dai, Y. Direction matters: A decentralized direction-based tdma scheduling strategy for vanet. In Proceedings of the 13th International Conference on Communication Technology (ICCT), Jinan, China, 25–28 September 2011; pp. 566–571. [Google Scholar]
- Samara, G. An improved CF-MAC protocol for VANET. Int. J. Electr. Comput. Eng. 2019, 9, 2668–2674. [Google Scholar] [CrossRef]
- Balador, A.; Calafate, T.C.; Cano, C.J.; Manzoni, P. DTB-MAC: Dynamic Token-Based MAC Protocol for Reliable and Efficient Beacon Broadcasting in VANETs. In Proceedings of the 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 109–114. [Google Scholar]
- Aggun, F.; Cibuk, M.; Rehman, U.S. A new Self-Organizing Multi-channel MAC schema for RSU-centric VANETs. Phys. A Stat. Mech. Appl. 2020, 551, 124098. [Google Scholar] [CrossRef]
- Ndih, N.D.E.; Cherkaoui, S. Mac for Physical-Layer Network Coding in VANETs. Int. J. Bus. Data Commun. 2012, 8, 84–106. [Google Scholar] [CrossRef]
- El-Gawad, M.A.A.; ElSharief, M.; Kim, H. A cooperative V2X MAC protocol for vehicular networks. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 65. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.; Sangaiah, K.; Wang, T. Adaptive Communication Protocols in Flying Ad Hoc Network. IEEE Commun. Mag. 2018, 56, 136–142. [Google Scholar] [CrossRef]
- Li, S.; Liu, Y.; Wang, J.; Sun, Z. SCMAC: A Slotted-Contention-Based Media Access Control Protocol for Cooperative Safety in VANETs. IEEE Internet Things J. 2020, 7, 3812–3821. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, X.; Zhang, M. A black-burst based time slot acquisition scheme for the hybrid TDMA/CSMA multichannel MAC in VANETs. IEEE Wirel. Commun. Lett. 2019, 8, 137–140. [Google Scholar] [CrossRef]
- Lyu, F.; Cheng, N.; Zhou, H.; Xu, W.; Shi, W.; Chen, J.; Li, M. DBCC: Leveraging link perception for distributed beacon congestion control in VANETs. IEEE Internet Things J. 2018, 5, 4237–4249. [Google Scholar] [CrossRef]
- Verma, P.; Singh, N.; Sharma, M. Modelling a vehicle-ID-based IEEE 802.11 OCB MAC scheme for periodic broadcast in vehicular networks. IET Commun. 2018, 12, 2401–2407. [Google Scholar] [CrossRef]
- Pressas, A.; Sheng, Z.; Ali, F.; Tian, D.; Nekovee, M. Contention-based Learning MAC Protocol for Broadcast Vehicle-to-Vehicle Communication. In Proceedings of the IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 263–270. [Google Scholar] [CrossRef] [Green Version]
- Qiu, F.J.H.; Ho, W.I.; Tse, K.C.; Xie, Y. Technical Report: A Methodology for Studying 802.11p VANET Broadcasting Performance with Practical Vehicle Distribution. IEEE Trans. Veh. Technol. 2015, 64, 1939–9359. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Cheng, N.; Zhu, Y.; Zhou, H.; Xu, W.; Xue, G.; Li, M. ABC: Adaptive Beacon Control for Rear-End Collision Avoidance in VANETs. In Proceedings of the 15th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Hong Kong, China, 11–13 June 2018; pp. 1–9, ISBN 978-1-5386-4281-8/18. [Google Scholar]
- Kenney, B.J.; Bansal, G.; Rohrs, E.C. LIMERIC: A Linear Message Rate Control Algorithm for Vehicular DSRC Systems. IEEE Trans. Veh. Technol. 2013, 62, 4182–4197. [Google Scholar] [CrossRef]
- Yang, W.; Liu, W.; Li, P.; Sun, L. TDMA-Based Control Channel Access for IEEE 802.11p in VANETs. Int. J. Distrib. Sens. Netw. 2014, 2014, 579791. [Google Scholar] [CrossRef]
- Hadded, M.; Laouiti, A.; Zagrouba, R.; Muhlethaler, P.; Saidane, A.L. A Fully Distributed TDMA based MAC Protocol for Vehicular Ad Hoc Networks; Research Report; Inria Paris Rocquen Court. HAL-Inria: Lyon, France, 2015; Available online: https://hal.archives-ouvertes.fr/hal-01211456/document (accessed on 8 November 2021).
- Karamad, E.; Ashtiani, F. Performance analysis of IEEE 802.11 DCF and 802.11e EDCA based on queueing networks. IET Commun. 2009, 3, 871–881. [Google Scholar] [CrossRef]
- Chung, M.J.; Kim, M.; Park, S.Y.; Choi, M.; Lee, S.; Oh, S.H. Time coordinated V2I communications and handover for WAVE networks. IEEE J. Sel. Areas Commun. 2011, 29, 545–558. [Google Scholar] [CrossRef]
- Cheng, S.T.; Horng, G.J.; Chou, C.L. Using Cellular Automata to Form Car Society in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1374–1384. [Google Scholar] [CrossRef]
- Zafar, A.B.; Boulila, N.; Saidane, L. Communication delay guarantee for IEEE 802.11p/wave Vehicle networks with RSU control. In Proceedings of the 13th International Conference on Networking, Sensing, and Control (ICNSC), Mexico City, Mexico, 28–30 April 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, M.; Guan, L. Overlap-Minimization Scheduling Strategy for Data Transmission in VANET. In Proceedings of the 2021 International Symposium on Networks, Computers and Communications (ISNCC), Dubai, United Arab Emirates, 31 October–2 November 2021. [Google Scholar]
- Kim, S.; Stark, E.W. Simple relay enabled MAC (SRMAC) protocol for cooperative communication. In Proceedings of the IEEE Military Communications Conference, San Diego, CA, USA, 18–20 November 2013; pp. 175–180. [Google Scholar]
- Wang, S.; Liu, J.; Zhou, S.; Zhou, L.; Yin, M.; Hao, H. Cooperative relay MAC protocol for ad hoc networks. In Proceedings of the 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017; pp. 612–616. [Google Scholar]
- Xiao, L.; Lu, X.; Xu, D.; Tang, Y.; Wang, L.; Zhuang, W. UAV Relay in VANETs Against Smart Jamming with Reinforcement Learning. IEEE Trans. Veh. Technol. 2018, 67, 4087–4097. [Google Scholar] [CrossRef]
- Valantina, M.G.; Jayashri, S. Q-Learning based point to point data transfer in Vanets. In Proceedings of the 3rd International Conference on Recent Trends in Computing (ICRTC), Ghaziabad, India, 12–13 March 2015; Volume 57, pp. 1394–1400. [Google Scholar]
- Karabulut, A.M.; Shahen Shah, M.F.A.; Ilhan, H. OEC-MAC: A Novel OFDMA Based Efficient Cooperative MAC Protocol for VANETS. IEEE Access 2020, 8, 94665–94677. [Google Scholar] [CrossRef]
- Shahen Shah, M.F.A.; Ilhan, H.; Tureli, U. RECV-MAC: A novel reliable and efficient cooperative MAC protocol for VANETs. IET Commun. 2019, 13, 2541–2549. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, H.; Huang, J. OCA-MAC: A Cooperative TDMA-Based MAC Protocol for Vehicular Ad Hoc Networks. Sensors 2019, 19, 2691. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoon, H.Y.; Ko, B.Y. CTMAC: A Cooperative TDMA MAC in Vehicular Ad Hoc Networks. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 18–20 October 2017; pp. 772–774. [Google Scholar] [CrossRef]
- Feng, T.K. LMA: Location- and Mobility-Aware Medium-Access Control Protocols for Vehicular Ad Hoc Networks Using Directional Antennas. IEEE Trans. Veh. Technol. 2007, 56, 3324–3336. [Google Scholar] [CrossRef]
- Huang, W.; Mao, Y.; Min, X.; Hu, J.; Shen, L. Analysis of SFR’s Impaction on Delay Time Based DMMAC for VANETs. In Proceedings of the 7th International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, Z.; Tang, Y. Distributed multi-channel MAC protocol for VANET: An adaptive frame structure scheme. IEEE Access 2019, 7, 12868–12878. [Google Scholar] [CrossRef]
- Salem, F.; Elhillali, Y.; Nisar, S. Efficient modelling of IEEE 802.11p MAC output process for V2X interworking enhancement. IET Netw. 2018, 7, 210–219. [Google Scholar] [CrossRef]
- Khanafer, M.; Kandil, M.; Al-Baghdadi, R.; Al-Ajmi, A.; Mouftah, T.H. Enhancements to IEEE 802.15.4 MAC Protocol to Support Vehicle-to-Roadside Communications in VANETs. In Proceedings of the IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; p. 15. [Google Scholar] [CrossRef]
- Khanafer, M.; Guennoun, M.; Mouftah, H. A Survey of Beacon Enabled IEEE 802.15.4 MAC Protocols in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 856–876. [Google Scholar] [CrossRef]
- Almalag, S.M.; Olariu, S.; Weigle, C.M. TDMA Cluster-based MAC for VANETs (TC-MAC). In Proceedings of the International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), San Francisco, CA, USA, 25–28 June 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Hadded, M.; Zagrouba, R.; Laouiti, A.; Muhlethaler, P.; Saïdane, A.L. An Adaptive TDMA Slot Assignment Strategy in Vehicular Ad Hoc Networks. J. Mach. Mach. Commun. 2014, 1, 175–194. [Google Scholar] [CrossRef]
- Shahin, N.; Kim, T.Y. An Enhanced TDMA Cluster-based MAC (ETCM) for Multichannel Vehicular Networks. In Proceedings of the International Conference on Selected Topics in Mobile and Wireless Networking (MoWNeT), Cairo, Egypt, 11–13 April 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Akhter, S.M.F.A.; Ahmed, M.; Shahen Shah, M.F.A.; Anwar, A.; Zengin, A. A Secured Privacy-Preserving Multi-Level Blockchain Framework for Cluster Based VANET. Sustainability 2021, 13, 400. [Google Scholar] [CrossRef]
- Li, M.; Lou, W.; Zeng, K. OppCast: Opportunistic Broadcast of Warning Messages in VANETs with Unreliable Links. In Proceedings of the 6th International Conference on Mobile Adhoc and Sensor Systems, Macau, China, 12–15 October 2009; pp. 534–543. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | Standards | Frequency Range (GHz) | Data Rates (Mbps) | Modulation |
|---|---|---|---|---|
| US | WAVE | 5.80–5.925 | 6–27 | OFDM |
| Europe | ITS/G5 | 5.85–5.905 | 6–12 | 2ASK/2PSK |
| China | C-V2X | 5.905–5.925 | 100 | QPSK/16QAM/64QAM/256QAM |
| Japan | STD/T75 | 5.770–5.880 | 1, 4 | 2ASK/QPSK |
| Korea | DSRC | 5.895–5.905 | 9, 12, 18, 24, 27 | QPSK/BPSK/2ASK |
| Protocols | Mechanism | Objective | Disadvantages |
|---|---|---|---|
| ALOHA [41] | TDMA based | Collision avoidance | Throughput reduction |
| S-AlOHA [42] | TDMA and CSMA sense the channel before transmission, and CSMA/CD used for collision detection | Collision avoidance and improved throughput | Unable to avoid collision in high-density scenarios and cannot handle hidden and exposed terminal problems |
| MACA [43], MACAW [44] | Handshake method by RTS/CTS and ACK | Overcomes hidden terminal problem | Performance degradation in dense scenarios |
| IEEE 802.11p [51] | DCF, CSMA/CA, WAVE, and DSRC-based | Reliable, adapted to frequent changing VANET environments, and alleviates collision | Applicable to minimal distances, and no focus on hidden and exposed terminal problems |
| ADHOC-MAC [47] | Dynamic TDMA based-distributed protocol | Contention-free access, and multi-hop and one-hop broadcast with QoS | Transmission overhead, inefficient real-time traffic control, and transmission delay |
| ACFM [52] | TDMA, and dynamic slot assignment | Alleviate collision | Lacks real-time control, and QoS degrades in dynamic scenarios |
| VeMAC [53] | TDMA based, and one-hop and multi-hop broadcasts | Handles hidden/exposed terminals | Delays due to broadcast storms |
| VeSOMAC [54] | TDMA-based distributed scheduling | Improved throughput in highway scenarios | Channel utilization is inefficient in high densities |
| CAH MAC [55] | Distributed TDMA | Enhanced throughput (non-safety application) | Access collision problem |
| A-ADHOC [56] | Adaptive frame length | Proper channel utilization and real-time application | Less throughput due to overhead |
| HER MAC [58] | Multi-channel access and adaptive broadcasting | Channel split and three-way handshake | Collision problems and delay |
| HTC MAC [59] | Hybrid TDMA/CSMA multi-channel | Overcome collision | Hidden/exposed terminal problems and communication overhead |
| SOFT MAC [57] | SDMA, OFDMA, TDMA, and CSMA mechanisms | Proper channel and resource allocation | Highly complex with overheads |
| DM MAC [60] | Dedicated multi-channel, co-ordinated adaptive broadcast | Proper broadcasting and throughput maximization | Performance degradation in changing topologies due to random slot assignment |
| SR. No. | Protocols | Comparison | Objective | Methodology | Simulator | Classification | Pros | Cons |
|---|---|---|---|---|---|---|---|---|
| 1 | eRTS-SA [69] | VeMAC [53], RTS-SA [102] | Avoids interference, reduces overhead, and eliminates the hidden terminal problem | Micro-base station, physical interference, and SINR | SUMO | Hybrid and TDMA | High throughput and fair channel access. | Scalability and energy efficiency |
| 2 | PT MAC [70] | ADHOC MAC [47], Even Odd MAC [103] | Collision avoidance, minimized overheads, and high delivery ratio | Potential collision detection, potential collision prediction, and potential collision elimination | MATLAB, and SUMO | Prediction based, TDMA, contention free, and decentralized | Minimized delay and collision | Overhead and energy consumption |
| 3 | I MAC [104] | CF-MAC [83], DTB MAC [105] | Reduced collision, and load balancing and packet loss ratio minimized | CSMA | MATLAB R2018b | Distributed and contention free | Collision avoidance | Hidden terminal problem and overhead |
| 4 | SoMMAC [106] | SOFTMAC [57], VeMAC [53] | Reduced cost | Clustering, two-way scenario, and fixed RSUs | NS2 | Multi-channel, unidirectional, contention based, distributed, cluster, and TDMA | Efficient handover, minimized collision, and high packet delivery | Power consumption and overhead |
| 5 | A VeMAC [71] | VeMAC [53] | Provide better performance in terms of access collision and channel utilization | TDMA, random selection of time slots, and one-hop and two-hop neighbor division | Analysis | Reservation based, multi-channel, and TDMA | Eliminates collision and handles unbalanced traffic | Hidden-node problem and throughput not analysed |
| 6 | MAP [72] | PLNC [107] | Handles collision and hidden node problem | Multi-hop data dissemination, two-phase transmission: multiple access phase and broadcast phase | Theoretical analysis | Decentralized, multi-hop, location based, and priority based | Reliable and avoids collision | Merging collision and throughput not analysed |
| 7 | NA MAC [74] | HC MAC [108], VeMAC [53] | Efficient slot allocation and hidden terminal problem | Three-way handshake with TDMA and CSMA/CA | NS3 | Distributed single channel | Reliable broadcast of safety message | Broadcast storm problem |
| 8 | OCT MAC [75] | TDMA and CDMA MAC, 802.11 Model [109] | Improves network throughput and channel quality | Optical channel DC model and CDMA, time synchronization (1PPS signal), and FCS at the physical layer | NS3 | TDMA, SNR, distributed | High throughput and minimized delay | Performance degradation in dynamic environment |
| 9 | AHT MAC [77] | Ve MAC [53], SS MAC [84], OGC MAC [100] | Resource wastage and overhead minimization | Two-way handshake, adaptive resource reservation, request conflict resolution, and synchronized switching | NS3 and SUMO | TDMA, multi-channel, and hybrid | Enhanced throughput and less delay | Overhead and packet loss |
| 10 | SC MAC [110] | TDMA and CSMA/CA based [59], BB MAC [111], DBCC [112] | Scalable, low latency, and high PDR | Black burst-based slot reservation and spatio-temporal coordination, and periodic random back-off scheme | Analysis | Hybrid, contention based, TDMA, and distributed | Alleviates collision and high PDR | Transmission delay |
| 11 | TCGMAC [78] | VeMAC [53], MoMAC [82] | Minimizes transmission collision and increases throughput | Frame divided into TP (transmission period) and CP (CSMA period), and game theory | MATLAB | TDMA + CDMA based and distributed | Collision alleviation | High power consumption and overhead |
| 12 | Cassam [79] | IEEE 802.11-OCB (CSMA/CA) [113] | Guaranteed safety application in real-time and hostile environments | Slotted 1 persistent | SUMO | Context aware, decentralized, and CSMA/CA | Minimized delay and enhanced throughput | Power consumption not analysed |
| 13 | Contention Based Learning MAC for Broadcast [114] | IEEE 802.11p [115] | Scalability, collision avoidance, and bandwidth wastage reduction | MAC+PHY, RL model, and discrete time stochastic control | OMNET++ and SUMO | Contention based and discrete time synchronization | High PDR and throughput | Fair-channel access and latency |
| 14 | ABC MAC [116] | LIMERIC [117], Conventional IEEE 802.11p | Avoid blocking of control channel and fair channel access | Heuristic greedy algorithm and distributed beacon congestion control | SUMO | TDMA-based broadcast MAC and distributed | High transmission ratio and avoids collision | No emphasis on non-safety message and throughput degradation in the dense scenario |
| 15 | MoMAC [82] | TDMA MAC [118], ADHOC, VeMAC [53] | Eliminates collision, handles hidden terminal, and delay-tolerant transmission | Distributed slot access, collision detection, and TDMA | SUMO | TDMA, distributed, and contention free | High reception rate and minimized delay | Cannot handle dynamic traffic |
| 16 | CF MAC [83] | DTMAC [119] | Collision-free transmission and QoS enhancement | Dynamic self-configured TDMA and platooning | MATLAB R2017a | Contention free and TDMA | Reliability and collision avoidance | Delay and performance degrades in dense scenarios |
| 17 | SS MAC [84] | Aggressive MAC and conservative MAC scheme | Reliable broadcast of safety messages | Distributed time slot sharing algorithm and random index first fit (RIFF) algorithm (heuristic packaging method) | MATLAB and SUMO | Periodical and distributed | Scalable, reliable, and minimized delay | Overhead and handling dynamic scenarios |
| 18 | VAT MAC [85] | VeMAC [53], ATSA [118] | Efficient broadcast of safety messages | Estimation of nodes, determination of leaving node, predicting newly entering node, and frame optimization | NS-2.35 and SUMO | Contention free, dynamic access, and time synchronized | Enhanced scalability and throughput | No proper time synchronization mechanism and delays |
| 19 | SAFE MAC [86] | standard 802.11 [120] | Fair channel access (V2I) | Batch selection and residence time calculation | Numerical analysis | Contention-based, CSMA/CA, and time synchronized | Minimized delay | Fairness issue not handled for V2V and V2D |
| 20 | ReMAC [87] | VeMAC [53], CFR MAC [121], VAT MAC [75] | Efficient channel usage | DSRC standard, and CCH and SCH organization with joining network channel | OMNET++ | Hybrid, multi-channel, and CSMA + FDMA | Minimized delay and high throughput | Communication overhead and energy consumption |
| 21 | QCH MAC [88] | CAC [122], EDCA-DCRRSU [123] | Delay constraint safety applications | EDCA combined with TDMA and two access periods: transmission period and reservation period | SUMO and NS 3.26 | Hybrid MAC, distributed, and TDMA+EDCA | Enhanced QoS | Hidden terminal problem and throughput can still be maximized |
| 22 | TSGS MAC [124] | Random sending | Minimizes collision and reduces overlapping connections | Scheduling strategy based on connection level | OMNET++ and SUMO | Centralized multi-channel and contention-based | Less delay and high PDR | overhead and hidden terminal |
| 23 | CoMACAV [90] | CAH MAC [55], SR MAC [125], and VeMAC [60] | Increasing throughput by selecting optimal relay using the Markov chain model | Three modes of transmission: DT, CR, and MHR | MATLAB | Contention based, cooperative, SNR, and multi-hop | High throughput | Delays |
| 24 | CR MAC [89] | ADHOC MAC (CAH MAC) [53] and Relay MAC [126] | A novel cooperative relay procedure | Three modes of data transmission: DT, CR, and MR; modification of control packets of IEEE 802.11 | MATLAB | Cooperative, contention based, and multi-hop | Enhanced throughput | Delays |
| 25 | UAV Relay in VANET with RL [127] | Q-learning-based scheme [128] | Reduces the bit rate error and jamming resistance for UAV | Relay game using Nash equilibrium (NE), hotbooting PHC (policy hill climbing), path loss, shadowing, and Reyleigh fading | SUMO | Smart jammer, hotbooting PHC based, and RL based | Minimized interference | High computational overhead |
| 26 | OEC MAC [129] | RECV MAC [130] | Optimal relay, appropriate transmission mode, and minimized delay | OFDMA, FSM with UML, and SINR | MATLAB | OFDMA, cooperative, SINR, and distributed | High throughput, PDR, and less delay | Performance degradation for unsaturated network |
| 27 | RECV MAC [130] | Traditional MAC | Reliable and efficient communication, and less packet dropping rate and delays | Markov model analysis, optimal helper, and use of FSM and UML | MATLAB | Random access, CSMA/CA, and cooperative | Reliable | Performance degradation in very high density and unsaturated scenarios |
| 28 | OCA MAC[131] | VeMAC [53], CAH MAC [55] | Improves probability of successful transmission rate | Cooperative forwarding; selecting optimal cooperative node; and time slots divided: free, successful and failed | NS2 | Cooperative TDMA based, probabilistic, multi-channel, centralized, and contention free | QoS in terms of throughput, delay, and PDR achieved | Performance of dynamic scenarios not analysed |
| 29 | CT MAC [132] | VeMAC [53], DTMAC [119] | Solve hidden terminal and collision problem. | Channel scheduling and back-off algorithm | Analysis | Cooperative and distributed | Eliminate collision | Throughput metrics not analysed in dense/sparse scenarios |
| 30 | ST MAC [94] | LMA [133], DMMAC [134], and EDCA | Improves channel efficiency, reduces delay, and optimizes the contention period & spatio-temporal transmission scheduling technique and R-ALOHA | Nakagami3 Radio Model and SUMO | Hybrid (PCF+DCF), contention free, and spatio-temporal coordination based | Minimized delay and high PDR | Overhead on RSU | |
| 31 | PD MAC [95] | DMC MAC [135,136] | Reliability and on-time delivery of time-critical messages to reduce accidents | Inter- and Intra-cluster clock synchronization, and three-tier priority assignment | VANET Toolbox | Priority, cluster based, and TDMA | Minimized delay | Performance degradation in urban scenarios |
| 32 | Enhancement of IEEE 802.15.4 MAC(DWA) [137] | BEB [138] | Smart back-off algorithm that improves delay and throughput | BEB and improves CSMA/CA used in traditional IEEE 802.15.4 | Analysis | IoT based, cluster, and dynamic window | Improved throughput and minimized delay | Energy utilization |
| 33 | CB MAC [96] | TDMA-based MAC [118] and RTS/CTS mechanism | Reduces contention, manages the network topology efficiently, and solves the hidden terminal problem | Formation of clusters, RTS/CTS for non safety messages, and CH and CM handshake for safety message transmission | MATLAB | Cluster, RTS/CTS, and handshake | High throughput and PDR | Cannot handle high vehicle densities |
| 34 | LMMC [97] | TCMAC [139], ASAS (Adaptive TDMA) [140], and ETCM [141] | Addressing spectrum scarcity problem and optimal channel utilization | Learning Automata for clustered VANET and probability calculation | NS 2.35 with SUMO | Cluster-based multi-channel MAC, dynamic TDMA, and CSMA/CA | Improved PDR | Does not prioritize messages (non-safety) |
| 35 | ACB MAC [142] | Traditional CB MAC | Collision free and authenticated reliable communication | Cluster based, blockchain framework, and prioritizing safety message | MATLAB | Cluster-based and multi-channel MAC | Minimized delay for safety messages and secure | Energy consumption and less throughput |
| 36 | Relia MAC [98] | DTB MAC [105] and oppcast MAC [143] | Timely and reliable transmission of safety data, cope with dynamic mobility pattern, and error prone communication | MAC fragmentation and segmentation, encoding FEC, and checksum calculator for ARQ | NS2 | Virtual token, distributed, sequential, and dynamic environment | High throughput and PDR | Overhead and energy |
| 37 | OGC MAC [100] | VeMAC [53], MCBC [99] | Proper resource allocation and channel access, and reliability | Random selection, contention strategy, and probability for collision free beacon broadcasting | SUMO | Parallel contention mechanism and OFDM | High throughput | Scalability issue and delays due to CW overload. |
| 38 | Self-Sorting-Based MAC [101] | Hassen’s Model, DMMAC [134], and VeMAC [53] | Minimizes channel collision and minimizes overhead | Data sent periodically, Self sorting by Markov chain, channel reservation, and probability of successful queuing is calculated | SUMO | TDMA, contention free, random access, and Distributed | Reduce packet loss and delay, and high throughput | Handling dynamic scenario and hidden terminal problem |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hota, L.; Nayak, B.P.; Kumar, A.; Ali, G.G.M.N.; Chong, P.H.J. An Analysis on Contemporary MAC Layer Protocols in Vehicular Networks: State-of-the-Art and Future Directions. Future Internet 2021, 13, 287. https://doi.org/10.3390/fi13110287
Hota L, Nayak BP, Kumar A, Ali GGMN, Chong PHJ. An Analysis on Contemporary MAC Layer Protocols in Vehicular Networks: State-of-the-Art and Future Directions. Future Internet. 2021; 13(11):287. https://doi.org/10.3390/fi13110287
Chicago/Turabian StyleHota, Lopamudra, Biraja Prasad Nayak, Arun Kumar, G. G. Md. Nawaz Ali, and Peter Han Joo Chong. 2021. "An Analysis on Contemporary MAC Layer Protocols in Vehicular Networks: State-of-the-Art and Future Directions" Future Internet 13, no. 11: 287. https://doi.org/10.3390/fi13110287
APA StyleHota, L., Nayak, B. P., Kumar, A., Ali, G. G. M. N., & Chong, P. H. J. (2021). An Analysis on Contemporary MAC Layer Protocols in Vehicular Networks: State-of-the-Art and Future Directions. Future Internet, 13(11), 287. https://doi.org/10.3390/fi13110287