Abstract
In the past decade, different sensing mechanisms and algorithms have been developed to detect or estimate indoor occupancy. One of the most recent advancements is using networked sensor nodes to create a more comprehensive occupancy detection system where multiple sensors can identify human presence within more expansive areas while delivering enhanced accuracy compared to a system that relies on stand-alone sensor nodes. The present work reviews the studies from 2012 to 2022 that use networked sensor nodes to detect indoor occupancy, focusing on PIR-based sensors. Methods are compared based on pivotal ADPs that play a significant role in selecting an occupancy detection system for applications such as Health and Safety or occupant comfort. These parameters include accuracy, information requirement, maximum sensor failure and minimum observation rate, and feasible detection area. We briefly describe the overview of occupancy detection criteria used by each study and introduce a metric called “sensor node deployment density” through our analysis. This metric captures the strength of network-level data filtering and fusion algorithms found in the literature. It is hinged on the fact that a robust occupancy estimation algorithm requires a minimal number of nodes to estimate occupancy. This review only focuses on the occupancy estimation models for networked sensor nodes. It thus provides a standardized insight into networked nodes’ occupancy sensing pipelines, which employ data fusion strategies, network-level machine learning algorithms, and occupancy estimation algorithms. This review thus helps determine the suitability of the reviewed methods to a standard set of application areas by analyzing their gaps.
1. Introduction
In the last decade, there has been a considerable shift from high-performance and energy-efficient buildings towards co-optimizing occupant comfort and building energy demand [1,2]. However, multiple studies show that a significant proportion of occupants in U.S. office buildings (up to 75%) are dissatisfied with their thermal environment [3,4]. The primary motivation behind this review article is to assess the suitability of networked node occupancy detection methods for a standard set of application areas. Our focus on networked nodes-based occupancy sensing methods derives from existing stand-alone occupancy sensors providing limited performance that can cause false negatives (switching off heating and lights during occupancy), resulting in occupant dissatisfaction [2]. Stand-alone occupancy sensor-based methods struggle to achieve the same level of improvement in occupant comfort level compared to networked occupancy sensor nodes while deployed under the same configuration [5]. Among recent review articles [2,6,7,8,9], an overwhelming majority focus on the methods that are based on stand-alone occupancy sensors. As such, no review exists that is dedicated to an algorithmic aspect of multi-node occupancy sensing [10]. Thus, in the past decade, a marked shift in the trend is observed where a growing number of methods propose more thorough and accurate occupancy detection models for applications such as HVAC Control and Occupant Comfort [11], involving an interconnected network of occupancy sensors. These models are aware of the room connectivity, time-sensitive occupancy behavior, and expected use of each space under observation.
The use of multiple sensing nodes is a common technique for improving detection performance. A few examples of how this can be achieved include extracting ML network-level features from a multivariate raw-sensor data [12] or determining occupancy via a PF [5] that fuses the node-level ML inference to estimate an occupancy belief.
We also observed that among all the reviewed articles, a basic premise is missing, i.e., the actual occupancy behavior depends upon the building design, sensor node positioning, room connectivity, purpose of each space in a residential or office unit, and occupant priorities, which tend to be highly time sensitive. Thus, any review study that lists out the subjective accuracy measures comparisons in a non-standardized form leaves a certain margin of uncertainty for the intended audience. While there are review studies that use evaluation metrics from the cost [9] of the proposed solution, to the accuracy and the failure rate [13] of the solution, our review study aims to evaluate the occupancy sensing methods for networked sensor nodes from an application’s perspective while using suggested standard parameters that help in the evaluation process. Methods are assessed based on the ADPs, i.e., accuracy requirement, information requirement, maximum sensor failure, minimum observation rate, and feasible detection area. While we value the importance of underlying sensor technologies toward greater occupancy detection accuracy, it is not the focus of our review study. We instead focus and comment on the employed occupancy detection measure by the methods, network-level data filtering and fusion techniques, NDD, and the spatial and temporal resolution of occupancy detection. The presented review is novel in assessing the impact, the gaps, and the enhanced accuracy networked-node occupancy detection systems offered.
In Section 2, gaps in closely related review articles from the literature are highlighted. Section 3 outlines the methodology for conducting this review. Section 4 identifies occupancy sensing gaps, application areas, and their ADPs based on the searched literature. Section 5 presents various networked node sensor-based occupancy detection solutions and their suitability to the already presented application areas. In Section 6, an accuracy and suitability analysis are performed for each identified solution, determining the extent to which each solution satisfies the ADPs put forward by each application area. Section 7 notes several emerging trends in the networked sensor nodes-based occupancy estimation domain. Finally, Section 8 presents a conclusion to this review article.
2. Comparison with Contemporary Review Articles
It may be helpful to elaborate here on the contributions of this review. This review offers the following unique advantages.
- The review’s primary objective is to guide a method selection process for occupancy sensing via a decision-making process that relies on quantifiable parameters called ADPs. A flowchart that illustrates the method selection process based on ADPs is presented in Figure 1.
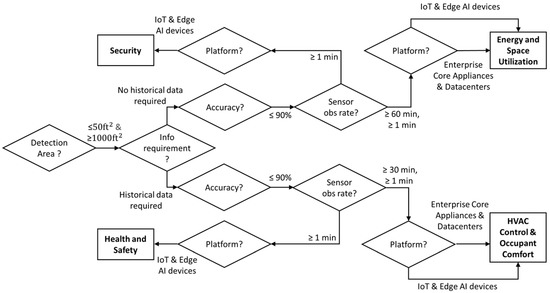 Figure 1. A decision tree that illustrates the expected use of ADPs (in diamond shaped boxes) to determine the suitable application area for the reviewed method. The same illustration is used to perform suitability analysis in Section 6. Sensor failure rate ADP is not used in the decision-making process as some reviewed methods did not specify the sensor details.
Figure 1. A decision tree that illustrates the expected use of ADPs (in diamond shaped boxes) to determine the suitable application area for the reviewed method. The same illustration is used to perform suitability analysis in Section 6. Sensor failure rate ADP is not used in the decision-making process as some reviewed methods did not specify the sensor details. - The review limits its focus by only considering methods employing networked sensor nodes and making it mandatory to use PIR technology in combination with other underlying sensing technologies. PIR was explicitly chosen to judge the algorithmic performance of occupancy sensing methods; these need to perform on a standard modality. PIR is the most frequently used occupancy sensing modality [14].
- The review comments on the conformity of reviewed articles to the claimed application areas based on the conformance criteria attached to ADPs which is detailed in Section 4.
Moreover, to further establish the novelty of this review, the contributions of contemporary review studies related to occupancy sensing, along with their corresponding gaps are listed in Table 1.

Table 1.
Contribution and gaps for contemporary occupancy sensing review studies involving networked sensor nodes.
3. Methodology
This review considers research articles that outline the occupancy estimation methods and algorithms involving two or more networked occupancy sensor nodes. It tabulates the studies highlighting gaps in using networked sensor nodes for occupancy sensing. These occupancy sensing gaps exist in several application areas. Each application area demands a specific set of parameters from the networked sensor nodes and the occupancy estimation methods to address application area challenges. These parameters are termed as ADPs. These ADPs are identified from the reviewed studies and are tabulated and associated with these studies. This phase is referred to as Occupancy Sensing Gap and ADP Identification phase. Articles in the literature that address the identified gaps are then evaluated. Comments are added to each article on whether the proposed solutions in the articles contain the ADPs demanded by a particular application area. This phase is termed the Solution to Application Mapping phase. The review is concluded by comparing the accuracy delivered by each solution. A discussion is added at the end of this chapter about the occupancy estimation methods used by each solution, and the reasons behind the reported accuracies are highlighted. Explanations are also listed as to why specific proposed solutions are not suitable to some application areas despite the contrary claims of the authors. This phase is termed the Accuracy and Suitability Analysis phase. The review thus presents a complete picture to the reader, from identifying sensing gaps, to the suitability of each available solution in the literature, to the gaps and application areas. It must be mentioned here that although the review’s primary focus lies on networked sensor nodes-based occupancy estimation solutions, the underlying sensor modalities for each solution are listed. The reviewed estimation methods may not be agnostic to the underlying sensing technology. An illustration summarizing the review methodology is shown in Figure 2.
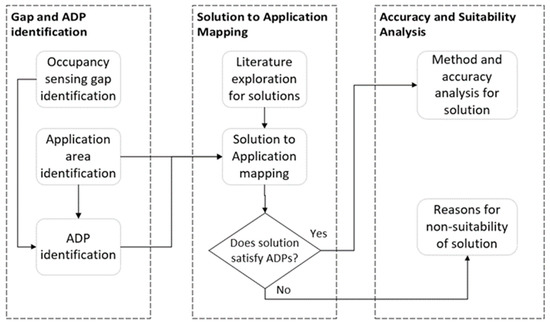
Figure 2.
A phased methodology chart outlines the review strategy. First, occupancy sensing gaps that require networked occupancy sensors and corresponding estimation techniques are identified. ADPs for the application area are identified. Solutions from the literature are explored and an analysis is performed to see whether the solutions are suited to the claimed application area.
4. Occupancy Sensing Gaps and ADP Identification
We first focus on identifying the occupancy detection gaps found in the literature for networked sensor node methods. Table 2 provides a non-exhaustive, but representative list of the most common gaps and the corresponding occupancy detection application area found within a set of representative studies. The gaps identified in Table 2 point towards a specific set of incapabilities that are present either within the underlying sensing technologies, the occupancy estimation method, or the communication and integration framework that enables the networking between these sensor nodes. As mentioned, this review only focuses on the shortcomings of the occupancy estimation methods. The impact of underlying sensing technologies and wireless sensor networks’ communication reliability are separate topics with dedicated studies [8,21] in the literature dealing with these topics. The shortcomings present within occupancy estimation methods for any given application area can be overcome through a set of parameters to which the estimation method must conform. We term these parameters ADPs. Table 3 transforms the identified gaps into ADPs with specific application values. Standard documents from various associations and agencies, such as the ASHRAE [22], CEC [23], IBC [24], NFPA [25], and IECC [26], are used in the table. The table lists IoT and Edge AI devices among the potential execution platforms.
Table 2.
Occupancy sensing gaps for Networked Sensor Nodes-Based Estimation Methods.
Table 3.
ADPs for each Application Area.
The ADPs listed in Table 3 serve as the suitability criteria when selecting a particular occupancy estimation solution for a specific application. These ADPs also bring to light certain exciting insights. For example, the accuracy requirement for occupancy sensors used for HVAC controls varies depending on the specific application and building type. However, the occupancy sensor accuracy should generally be high enough to correctly detect the presence or absence of occupants in a particular area. The accuracy requirement becomes more stringent in the case of both safety and security applications. This is because these applications include critical services, such as emergency evacuation, fire detection and suppression, and security depending on the occupancy sensor’s ability to accurately detect the presence or absence of people in a building. Another important insight is that the response time of the occupancy detection method becomes essential for safety and security applications, as it should be fast enough to detect the presence of people and activate the safety system accordingly. We thus see that the potential execution platform for such applications excludes time-consuming cloud-based processing options, such as Enterprise core appliances and Datacenters.
It is additionally worth noting that CEC standards recommend using occupancy sensors in smaller indoor spaces with high traffic that have an area less than 300 ft2, while at the same time, these standards recommend using occupancy sensors in storage rooms or multi-purpose spaces as large as 1000 ft2. It must be mentioned here that these standards do not make recommendations for emergency facilities such as healthcare facilities or fire stations since critical operations may be affected due to automated control.
We observe that security applications demand high sensor NDD since it is crucial to achieving reliable tracking of occupants indoors. In addition, security applications such as intrusion detection are required to detect the path or trajectory (entering or leaving) that the occupant is pursuing.
5. Solutions to Application Mapping
This review aims to establish the suitability of state-of-the-art networked sensor nodes-based occupancy estimation solutions to occupancy detection application areas. It is critical to mention that the sensor nodes can be exposed to phenomena that interfere with sensor measurements. The phenomena can include pronounced variations of temperature, pressure, radiation, IR shielding [27], EM shielding [28], IR noise [5], and EM noise [29]. In short, sensor measurements are error prone. Data fusion techniques have been widely employed in the literature to overcome such errors. Data fusion is “the use of techniques that combine data from multiple sources and gather this information to achieve inferences” [30]. The inferences are expected to be more accurate and robust than if these were achieved via simple aggregation techniques, such as average, maximum, minimum, or a union of outputs of multiple sensor nodes. Moreover, strong inferences can be achieved through networked sensor nodes whenever a node-level communication breakdown occurs as these may observe common observation zones. In practice, networked sensor nodes commonly suffer from communication breakdowns. The literature contains data fusion methods that can be centralized or distributed systems. In centralized systems, raw sensor data is sent to a central hub or sink node, and the data fusion method processing is performed at the central node. In distributed systems, the distributed components of the fusion method would execute on distributed nodes in the design, with each node utilizing its local data.
It is well known that data fusion caters to the spatial and temporal coverage blind spots of sensor nodes [5]. For occupancy sensors, the spatial coverage of a sensor usually means the sensor’s FoV or its effective volumetric detection range. Their temporal coverage usually depends on the sensor’s sampling rate, node’s duty cycle, and communication delays [30]. Table 4 lists the reviewed methods along with the employed occupancy detection measure, network-level data filtering and fusion techniques, NDD, and the spatial and temporal resolution of the occupancy detection.
Table 4.
Reviewed solution details and claimed application area.
Some specific observations can be made about the data presented in Table 4.
- A solution can only be used in Energy and Space Utilization applications if and only if these are scalable, i.e., NDD is low. Energy and Space utilization is usually measured across an entire commercial or residential unit. Any solution with a relatively high NDD is essentially non-scalable due to additional infrastructure costs.
- Health and Safety and Security applications require high occupant tracking and detection accuracy. The solutions usually achieve this at the expense of high NDD. Even though such solutions have high accuracy (≥95%), these cannot be employed for HVAC Control, and Occupant Comfort and Energy and Space Utilization applications as scalability is infeasible.
- Although NN-based classification and regression techniques achieve relatively high accuracy, the network training input size is fixed. Thus, any missing sensor time-series data would need to be imputed for the model to be able to produce an inference. Moreover, the pre-requisite of collecting a dataset must be satisfied to deploy any NN.
- Sensors such as CO2 and VOC require almost 30 min to respond reliably to occupancy. Likes of PIR, temperature and light sensors can register occupancy several times a second. This disparity and the resulting advantage of high frequency sensors should be kept in mind while comparing the accuracies for various presented solutions.
- Sensors such as CO2 and VOC are sometimes placed at the ventilation ducts in some of the methods listed in Table 4. Under such scenarios, NDD tends to be very low for these sensors, thus presenting an advantage for using these sensors.
6. Accuracy and Suitability Analysis
There are broad fusion implementation categories mentioned in [10], namely: (1) analytical methods, (2) knowledge-based methods, and (3) data-driven methods. Each of these categories has its own set of shortcomings that either emanate from node-level detection errors or are an artifact of the network-level occupancy detection method.
The analytical methods study the physical behavior of occupants and its impact on the indoor environment. These methods exploit the relationship between environmental variables and human presence to derive occupancy decisions. For example, Ref. [22] presents an occupancy detection method based on various indoor climate sensor data trajectories. Data from CO2 and VOC sensors were used to evaluate vacancy, while data from PIR sensors were used to judge occupancy. No prior information about the testbed or dataset prerequisites is required by this method. Despite relying on three different sensor modalities, this method reported as much as 43.5% false negatives and 11.8% false positives for a dormitory occupancy scenario.
The knowledge-based methods, also known as expert systems, use specialized knowledge represented by rules to solve complex problems. A good example is a Finite State Machine-based State Switch algorithm [43] that utilizes SLEEPIR [44] nodes capable of detecting stationary occupants. Yet, it is not able to robustly handle the node-level detection errors, and a transition to the wrong state would be produced in case a false occupancy determination was made at the node level. Similarly, any network-level aggregation algorithm, e.g., the union of outputs of stand-alone sensor nodes, will fail to handle a false positive detection determination made at the node level.
The data-driven methods include the following sub-categories of methods.
- Statistical and deep learning ML methods
- Bayesian inference methods
- HMM-based methods
ML-based network-level occupancy detection methods that process statistical features extracted from raw sensor-node observations can handle uncertainty, but have limited application due to the pre-requisite of acquiring labeled training dataset [37]. Not only automated occupancy labeling itself is resource intensive for such datasets, but also achieving a class balance between “occupied” and “unoccupied” label classes is an equally challenging task [37]. It has also been shown that typical ML algorithms only accept training data with fixed sizes; thus, a networked node occupancy detection problem which can have a variable number of sensor nodes (due to occasional communication or hardware failure), would need to reformat the data into a fixed format, which often requires data fusion to happen prior to ML training phase [37,45]. Furthermore, deep learning ML models require large datasets to train. Thus, it is infeasible to re-collect a large amount of data to retrain to handle any novelty in the occupancy patterns [46]. In the Bayesian inference methods sub-category, node-level occupancy estimation is usually performed via ML algorithms or knowledge-based methods. In contrast, the network-level occupancy estimation is performed by fusing the node-level assessment through a Bayesian inference-based framework [45]. Although this approach has produced accuracies up to 93% [21] in uncontrolled experiments, generating ML inference for each node, on-device, is resource intensive.
Based on the above discussion on categorizing occupancy sensing methods for networked nodes, a taxonomy chart is presented in Figure 3.
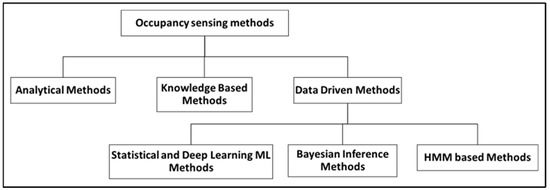
Figure 3.
Taxonomy of occupancy sensing methods.
In the past, many review articles attempted to vaguely attribute the categories of occupancy sensing methods to specific application areas. As such, no one-to-one or one-to-many correspondence exists between the method categories shown in Figure 3 and the application areas mentioned in Table 2. The problem of suitability of applications to methods is much more nuanced and requires specific criteria to be met before suitability can be established. To achieve this end, Table 5 details the breakdown of how the ADPs for each application area map to each of the reviewed solutions in Table 4.
Table 5.
ADPs conformance for each application area.
Comments on Solution Conformance to the Claimed Application Areas
Ref. [31]: Not feasible for the author-claimed Energy and Space Utilization application as the solution accuracy does not meet ADP accuracy criteria, i.e., 71% < 90%. It is a data-driven method, thus has a pre-requisite of historical data collection before its deployment.
Ref. [32]: Suitable for the author claimed HVAC Control and Occupant Comfort application on a smaller scale. The solution cannot scale up well as the spatial NDD is high, i.e., 49 ft2/node. It is a data-driven method.
Ref. [33]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application even on a smaller scale. This is because the execution platform for the algorithm is a PC or Server, and the implementation is not optimized for an IoT or Edge AI device. In addition, the solution cannot scale up well as the spatial NDD is high, i.e., 28 ft2/node. It is a data-driven method and has a dataset pre-requisite. Alternatively, the method is suitable for Energy and Space Utilization applications.
Ref. [35]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application. Although the sensor node data is logged via MCU, the ML algorithm execution platform for the algorithm is a PC/Server. Moreover, solution accuracy does not meet ADP accuracy criteria, i.e., 87.6% < 90%. It is a data-driven method and has a dataset pre-requisite.
Ref. [34]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application. Sensor data is logged via third party loggers, the ML algorithm execution platform for the algorithm is MATLAB/WEKA on a PC or Server. Moreover, solution accuracy does not meet ADP accuracy criteria, i.e., 75% < 90%. It is a data-driven method and has a dataset pre-requisite.
Ref. [5]: Suitable for the author-claimed HVAC Control and Occupant Comfort and Energy and Space Utilization applications. The solution can scale up as the spatial NDD is low, i.e., 364 ft2/node. It is a data-driven method and thus requires a labeled dataset to be collected. The method also needs historical sensor data for correlation evaluation. The solution is optimized in terms of node power consumption, local processing at nodes via an IoT device. The ML pre-processing inference is made on an IoT device, which is mentioned to be a CPE. The solution is also alternatively suitable for Health and Safety applications as it meets the desired ADP guidelines for this application area and can track occupancy at room level. For reference, a system level diagram for the solution is illustrated in Figure 4.
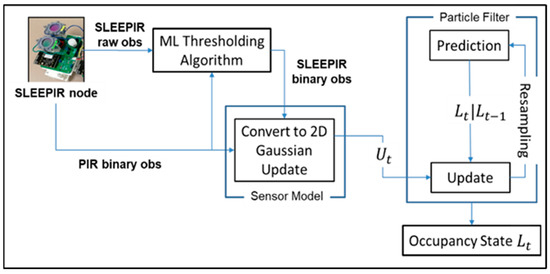
Figure 4.
PF-based human occupancy detection method flow chart. Networked sensor nodes (SLEEPIR) generate voltage, ambient temperature, and PIR data. The voltage is converted to binary occupancy observations via an ML-based thresholding algorithm. The node-level occupancy observations then update a system-level occupancy estimate via a PF.
Ref. [36]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application. Algorithm execution platform for the algorithm is a PC or Server. Moreover, solution accuracy does not meet ADP accuracy criteria, i.e., 84.0% < 90%. It is a data-driven method and requires historical sensor data for time-series data correlation evaluation.
Ref. [41]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application. The solution cannot scale up well with the spatial NDD of 14 ft2/node. It is a data-driven method and thus, requires a labeled dataset. Although the method uses a standard protocol by ASHRAE for sensor communication, the regression algorithm execution is not optimized for IoT execution which makes the feasibility of the algorithm questionable to be used as a solution for occupancy detection.
Ref. [37]: Suitable for the author-claimed HVAC Control and Occupant Comfort application. The solution can scale up well as the spatial NDD is sufficient to cover an average-sized room, i.e., 140 ft2/node. It is a data-driven method; thus, it requires a dataset to be collected pre-deployment. Moreover, a human activities layer is incorporated in the learning model which requires domain knowledge about the occupancy patterns. The solution has matured to the point that it has been implemented over an IoT device.
Ref. [7]: Suitable for the author-claimed HVAC Control and Occupant Comfort and Energy and Space Utilization applications. The solution can scale up as the spatial NDD is low, i.e., 296 ft2/node. It is a data-driven method and thus, requires a labeled dataset to be collected. The solution is optimized in terms of node power consumption and local processing at nodes via an IoT device. The ML pre-processing, training and inference, however, is made at a back-end machine. Since a two FFNN is relatively simple to implement over an IoT-compatible ML framework, such as TensorFlow Lite, a case can be made that the solution is suitable for an IoT-based implementation. The solution is also alternatively suitable for Health and Safety applications as it meets the desired ADP guidelines for this application area.
Ref. [38]: Not feasible for the author-claimed HVAC Control and Occupant Comfort application. The solution can also not scale up well with the spatial NDD of 54 ft2/node. It is an analytical method; thus, it may only require domain knowledge, yet certain thresholds and parameters for Zero Lag Exponential Moving Average algorithm require empirical tuning. The algorithm can be easily ported to IoT for execution which makes the method suitable for IoT execution, but the accuracy needs to meet ADP accuracy criteria, i.e., 77.8% < 90%. Ref. [39]: Not feasible for the author-claimed Energy and Space Utilization application. The solution accuracy does not meet ADP accuracy criteria, i.e., 85% < 90%. It is a data-driven method and requires historical sensor data for developing Gaussian distribution models for diverse occupancy patterns for all monitored spaces. It is achieved via averaging the fitting results for the past twenty-four days.
Ref. [40]: Not feasible for the author-claimed Energy and Space Utilization and HVAC Control and Occupant Comfort applications. The solution accuracy does not meet ADP accuracy criteria, i.e., 87.5% < 90%. Although the execution platforms are mature (IoT and cloud-based), the fusion algorithm is a simple aggregation algorithm that does not work well with motion sensors. The motion sensors are placed at a distance no less than 30 cm from under the desk of subjects, yet the occupancy sensing algorithm assumes that subjects not completely stationary while sitting at their desks and while not present at their desks, the office space is vacant.
Ref. [42]: Suitable for the author-claimed HVAC Control and Occupant Comfort and Energy and Space Utilization applications. The solution is not expected to scale up as the spatial NDD is very high, i.e., 18 ft2/node. The method requires ground-truth data to label and train IHMM parameters via supervised learning. New sensor data is also needed to update the historical dataset to periodically tweak the model parameters, for accurate long-term applications, such as space usage analysis and occupancy modeling. The solution is not optimized in terms of node power consumption and IoT/Edge AI execution. The solution system level diagram is shown in Figure 5 for reference.
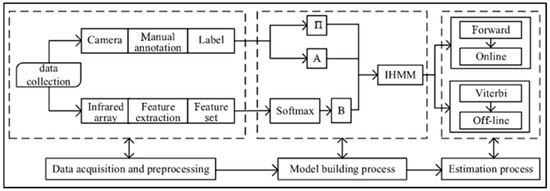
Figure 5.
Raw data is obtained through infrared array sensors along with a camera to build occupancy transition probability matrix A. The parameter learning process of the IHMM model is introduced and the emission probability matrix B is calculated by Softmax Regression Model. Finally, according to the constructed IHMM, the Forward Algorithm and the Viterbi Algorithm are used to realize the online estimation and offline estimation of the indoor occupancy of a building.
7. Discussion and Future Trends
One of the important ADP indicators used in the suitability analysis is NDD. It is interesting to note here that this density is a simple indicator that is evaluated by dividing the total area of the monitored indoor space by the number of sensor nodes employed by the method. This indicator has no direct relationship with the sensor FoV or range, which is usually significantly smaller than the NDD. There is a list of factors that contributes to determining the NDD. The most impactful ones include the node positioning strategy, estimation method accuracy, network/communication reliability, environment-contributed sensor noise, and the floor plan of the monitored area. Among these factors, the node positioning strategy, estimation method accuracy, and network reliability are the factors that can be optimized to decrease NDD. In effect, NDD can be considered a proposed optimization measure by a method for the node positioning strategy, estimation method accuracy, and network reliability. However, dedicated studies exist for the node-positioning strategy [47] and network reliability [21], but none of the reviewed articles devised their positioning strategy.
During the review effort, it was noticed that most studies focused on HVAC Control and Occupant Comfort and Energy and Space Utilization applications rather than applications such as Health and Safety and Security. This is because the latter have ADPs that require high reliability and accuracy, which is difficult to achieve given the challenging task of occupancy detection and tracking in dynamic environments. Most of the reviewed works attempted to tackle the challenge of highly noise-prone and dynamic environments by adding to the suite of sensor modalities. However, a small minority of methods [7,38] presented the sensor data responsible for false positives or negatives and proposed consequent solutions to resolve the errors.
Among the researched literature, one of the significant gaps for data-driven occupancy detection methods was the need for periodic collection of training sets to incorporate novel occupancy scenarios. The dataset also includes ground-truth occupancy data. This is a problem because the collection and labeling of new training datasets are far from ideal tasks for an end user or, in some cases, infeasible. To address this issue, certain studies [48,49,50] have suggested unsupervised methods, as these algorithms do not need to label the dataset. Yet, such methods have limited applicability since error-prone prior expert knowledge is used to initialize classes. This knowledge may be based on assumptions or sensor data distribution that may only be valid once the occupancy patterns evolve.
The future for tracking such a complex issue lies in employing more capable IoT devices, such as Edge AI devices [51], so that on-device ML training and inference can be produced incorporating newer occupancy scenarios. The dedicated field of ODLL [46,52,53] offers benefits, such as a local learning approach where occupancy patterns are learned on the fly, thus making such methods suitable for practice. Moreover, privacy-preserving automated labeling techniques are the flip side of the coin when an OODL approach is used, as the collected dataset also needs to be labeled. The literature needs reliable privacy-preserving techniques, but video or image-based automated yet privacy-compromising ground-truth collection techniques [54,55] can be found.
8. Conclusions
This review presents a matching strategy for mapping occupancy estimation methods involving networked sensor nodes to the most suitable application areas. During the course of the evaluation, multiple application areas were investigated to identify a set of ADPs that can help guide the suitability determination process. The ADPs represent the most demanding requirements presented by each application area, as suggested by the literature. The ADPs can be used to derive design specifications for developing a new occupancy-sensing solution or can equally be used to assess an already designed solution. ADPs are determined based on occupancy standards documentation published by various regulatory and research bodies, performance constraints dictated by the sensing technologies and computing equipment, and application area considerations. As a result of stringent application area requirements placed by standardization agencies, sensor limitations, and challenging environmental constraints, only a limited number of reviewed methods conform to the ADPs criteria proposed by this review study.
In future work, more ADPs can be extracted for each application area. In addition, conformance criteria can be fine-tuned for each ADP based on industrial demands, published building and sensing technology codes, as well as market trends.
Author Contributions
Conceptualization, Y.W. and M.E.-U.-D.; methodology, M.E.-U.-D. and Y.W. investigation, M.E.-U.-D. and Y.W.; resources, M.E.-U.-D. and Y.W.; writing—original draft preparation, M.E.-U.-D.; writing—review and editing, M.E.-U.-D. and Y.W.; visualization, M.E.-U.-D.; supervision, Y.W.; project administration, Y.W.; funding acquisition, Y.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the U.S. Department of Energy, Advanced Research Projects Agency-Energy (ARPA-E) under Grant DE-AR0000945, and the U.S. National Science Foundation (Award # CMMI 1851635; Award # ECCS 2021081).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| AI | Artificial Intelligence | ML | Machine Learning |
| ADP | Application-desired Parameters | MTBF | Mean Time Before Failure |
| AR | Autoregressive | NDD | Node Deployment Density |
| ARM | Advanced RISC Machine | NEMA | National Electrical and Manufacturers Association |
| ASHRAE | American Society of Heating, Refrigerating and Air-Conditioning Engineers | NN | Neural Networks |
| AWT | Absolute Water Content | NFPA | National Fire Protection Association |
| CEC | California Energy Commission | ODLL | On-device Lifelong Learning |
| CPE | Customer Premise Equipment | PF | Particle Filter |
| EM | Electromagnetic | PIR | Passive Infrared |
| FFNN | Feed-Forward NN | QDA | Quadratic Discriminant Analysis |
| FoV | Field-of-View | RF | Radiofrequency |
| HMM | Hidden Markov Model | RH | Relative Humidity |
| HVAC | Heating Ventilation and Air-Conditioning | SLEEPIR | Synchronized Low Energy Electronically chopped PIR |
| IHMM | Inhomogeneous HMM | SoC | System-on-a-Chip |
| IBC | International Building Code | SVM | Support Vector Machine |
| IECC | International Energy Conservation Code | TVOC | Total VOC |
| IR | Infrared | VOC | Volatile Organic Compounds |
| IoT | Internet of things | WEKA | Waikato Environment for Knowledge Analysis |
| KNN | K-Nearest Neighbor | ||
| LDA | Linear Discriminant Analysis | ||
| MCU | Microcontroller Unit |
References
- Zhang, W.; Wu, Y.; Calautit, J.K. A review on occupancy prediction through machine learning for enhancing energy efficiency, air quality and thermal comfort in the built environment. Renew. Sustain. Energy Rev. 2022, 167, 112704. [Google Scholar] [CrossRef]
- Bae, Y.; Bhattacharya, S.; Cui, B.; Lee, S.; Li, Y.; Zhang, L.; Im, P.; Adetola, V.; Vrabie, D.; Leach, M.; et al. Sensor impacts on building and HVAC controls: A critical review for building energy performance. Adv. Appl. Energy 2021, 4, 100068. [Google Scholar] [CrossRef]
- Erickson, V.L.; Cerpa, A.E. Thermovote. In Proceedings of the Fourth ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings-BuildSys 12, New York, NY, USA, 6 November 2012. [Google Scholar] [CrossRef]
- Karmann, C.; Schiavon, S.; Graham, L.T.; Raftery, P.; Bauman, F. Comparing temperature and acoustic satisfaction in 60 radiant and all-air buildings. Build. Environ. 2017, 126, 431–441. [Google Scholar] [CrossRef]
- Emad-Ud-Din, M.; Chen, Z.; Wu, L.; Shen, Q.; Wang, Y. Indoor Occupancy Estimation Using Particle Filter and SLEEPIR Sensor System. IEEE Sens. J. 2022, 22, 17173–17183. [Google Scholar] [CrossRef]
- Zhang, L.; Leach, M.; Bae, Y.; Cui, B.; Bhattacharya, S.; Lee, S.; Im, P.; Adetola, V.; Vrabie, D.; Kuruganti, T. Sensor impact evaluation and verification for fault detection and diagnostics in building energy systems: A review. Adv. Appl. Energy 2021, 3, 100055. [Google Scholar] [CrossRef]
- Adeogun, R.; Rodriguez, I.; Razzaghpour, M.; Berardinelli, G.; Christensen, P.H.; Mogensen, P.E. Indoor Occupancy Detection and Estimation Using Machine Learning and Measurements from an IoT LoRa-based Monitoring System. In Proceedings of the 2019 Global IoT Summit (GIoTS), Aarhus, Denmark, 17–21 June 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Giri, D.; Shreya, S.; Kumari, P.; Yadav, R. Indoor human occupancy detection using Machine Learning classification algorithms & their comparison. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1110, 012020. [Google Scholar] [CrossRef]
- Maaspuro, M. Infrared occupancy detection technologies in building automation-A review. ARPN J. Eng. Appl. Sci. 2018, 13, 8055–8068. [Google Scholar]
- Rueda, L.; Agbossou, K.; Cardenas, A.; Henao, N.; Kelouwani, S. A comprehensive review of approaches to building occupancy detection. Build. Environ. 2020, 180, 106966. [Google Scholar] [CrossRef]
- Nastasi, B.; Markovska, N.; Puksec, T.; Duić, N.; Foley, A. Renewable and sustainable energy challenges to face for the achievement of Sustainable Development Goals. Renew. Sustain. Energy Rev. 2022, 157, 112071. [Google Scholar] [CrossRef]
- Cao, N.; Ting, J.; Sen, S.; Raychowdhury, A. Smart Sensing for HVAC Control: Collaborative Intelligence in Optical and IR Cameras. IEEE Trans. Ind. Electron. 2018, 65, 9785–9794. [Google Scholar] [CrossRef]
- Dong, B.; Kjærgaard, M.B.; De Simone, M.; Gunay, H.B.; O’Brien, W.; Mora, D.; Dziedzic, J.; Zhao, J. Sensing and Data Acquisition. In Exploring Occupant Behavior in Buildings; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 77–105. [Google Scholar]
- Feagin, B., Jr.; Poplawski, M.E.; Day, J.T. A Review of Existing Test Methods for Occupancy Sensors. United States. 18 August 2020. Available online: https://www.osti.gov/biblio/1668746 (accessed on 17 February 2023).
- Ding, Y.; Han, S.; Tian, Z.; Yao, J.; Chen, W.; Zhang, Q. Review on occupancy detection and prediction in building simulation. Build. Simul. 2022, 15, 333–356. [Google Scholar] [CrossRef]
- Sayed, A.N.; Himeur, Y.; Bensaali, F. Deep and transfer learning for building occupancy detection: A review and comparative analysis. Eng. Appl. Artif. Intell. 2022, 115, 105254. [Google Scholar] [CrossRef]
- Trivedi, D.; Badarla, V. Occupancy detection systems for indoor environments: A survey of approaches and methods. Indoor Built Environ. 2020, 29, 1053–1069. [Google Scholar] [CrossRef]
- Ahmad, J.; Larijani, H.; Emmanuel, R.; Mannion, M.; Javed, A. Occupancy detection in non-residential buildings–A survey and novel privacy preserved occupancy monitoring solution. Appl. Comput. Inform. 2021, 17, 279–295. [Google Scholar] [CrossRef]
- Natarajan, A.; Krishnasamy, V.; Singh, M. Occupancy detection and localization strategies for demand modulated appliance control in Internet of Things enabled home energy management system. Renew. Sustain. Energy Rev. 2022, 167, 112731. [Google Scholar] [CrossRef]
- Azimi, S.; O’Brien, W. Fit-for-purpose: Measuring occupancy to support commercial building operations: A review. Build. Environ. 2022, 212, 108767. [Google Scholar] [CrossRef]
- Rodriguez, I.; Lauridsen, M.; Vasluianu, G.; Poulsen, A.N.; Mogensen, P. The Gigantium Smart City Living Lab: A Multi-Arena LoRa-based Testbed. In Proceedings of the 2018 15th International Symposium on Wireless Communication Systems (ISWCS), Lisbon, Portugal, 28–31 August 2018. [Google Scholar] [CrossRef]
- Gunay, B.; Nagy, Z.; Miller, C.; Ouf, M.; Dong, B. Using Occupant-Centric Control for Commercial HVAC Systems. ASHRAE J. 2021, 63, 30–40. (In English) [Google Scholar]
- California Energy Commission. Building Energy Efficiency Standards for Residential and Nonresidential Buildings: For the 2022 Building Energy Efficiency Standards Title 24, Part 6, and Associated Administrative Regulations in Part 1 (Building Energy Efficiency Standards-Title 24); California Energy Commission: Sacramento, CA, USA, 2022. [Google Scholar]
- International Code Council. International Building Code. 2021. Available online: https://search.library.wisc.edu/catalog/999907647602121 (accessed on 17 February 2023).
- NFPA 99; Standard for Health Care Facilities. N.F.P. Association: New York, NY, USA, 2021.
- International Code Council. International Energy Conservation Code; International Code Council, Inc.: Country Club Hills, IL, USA, 2021. [Google Scholar]
- Jeong, S.-M.; Ahn, J.; Choi, Y.K.; Lim, T.; Seo, K.; Hong, T.; Choi, G.H.; Kim, H.; Lee, B.W.; Park, S.Y.; et al. Development of a wearable infrared shield based on a polyurethane–antimony tin oxide composite fiber. NPG Asia Mater. 2020, 12, 32. [Google Scholar] [CrossRef]
- George, B.; Zangl, H.; Bretterklieber, T.; Brasseur, G. Seat Occupancy Detection Based on Capacitive Sensing. IEEE Trans. Instrum. Meas. 2009, 58, 1487–1494. [Google Scholar] [CrossRef]
- Zhang, Y.; Rasmussen, K. Detection of Electromagnetic Interference Attacks on Sensor Systems. In Proceedings of the 2020 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 18–21 May 2020. [Google Scholar] [CrossRef]
- Abdelgawad, A.; Bayoumi, M. Data Fusion in WSN. In Resource-Aware Data Fusion Algorithms for Wireless Sensor Networks; Springer: New York, NY, USA, 2012; pp. 17–35. [Google Scholar]
- Tryon, D.L. Bayes’ Network and Smart Sensors–Occupancy Detection. Ph.D. Thesis, The University of Nebraska-Lincoln, Ann Arbor, MI, USA, 2020. [Google Scholar]
- Singh, A.P.; Jain, V.; Chaudhari, S.; Kraemer, F.A.; Werner, S.; Garg, V. Machine Learning-Based Occupancy Estimation Using Multivariate Sensor Nodes. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hailemariam, E.; Goldstein, R.; Attar, R.; Khan, A. Real-time occupancy detection using decision trees with multiple sensor types. In Proceedings of the 2011 Symposium on Simulation for Architecture and Urban Design, Boston, MA, USA, 3–7 April 2011; pp. 141–148. [Google Scholar]
- Ekwevugbe, T.; Brown, N.; Pakka, V.; Fan, D. Real-time building occupancy sensing using neural-network based sensor network. In Proceedings of the 2013 7th IEEE International Conference on Digital Ecosystems and Technologies (DEST), Menlo Park, CA, USA, 24–26 July 2013. [Google Scholar] [CrossRef]
- Yang, Z.; Li, N.; Becerik-Gerber, B.; Orosz, M. A Multi-Sensor Based Occupancy Estimation Model for Supporting Demand Driven HVAC Operations. In Proceedings of the 2012 Symposium on Simulation for Architecture and Urban, San Diego, CA, USA, 26 March 2012. [Google Scholar]
- Ai, B.; Fan, Z.; Gao, R.X. Occupancy estimation for smart buildings by an auto-regressive hidden Markov model. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014. [Google Scholar] [CrossRef]
- Wang, C.; Jiang, J.; Roth, T.; Nguyen, C.; Liu, Y.; Lee, H. Integrated sensor data processing for occupancy detection in residential buildings. Energy Build. 2021, 237, 110810. [Google Scholar] [CrossRef]
- Pedersen, T.; Nielsen, K.; Petersen, S. Method for room occupancy detection based on trajectory of indoor climate sensor data. Build. Environ. 2017, 115, 147–156. [Google Scholar] [CrossRef]
- Ding, Y.; Chen, W.; Wei, S.; Yang, F. An occupancy prediction model for campus buildings based on the diversity of occupancy patterns. Sustain. Cities Soc. 2021, 64, 102533. [Google Scholar] [CrossRef]
- Sheikh Khan, D.; Kolarik, J.; Anker Hviid, C.; Weitzmann, P. Method for long-term mapping of occupancy patterns in open-plan and single office spaces by using passive-infrared (PIR) sensors mounted below desks. Energy Build. 2021, 230, 110534. [Google Scholar] [CrossRef]
- Kim, S.H.; Moon, H.J. Case study of an advanced integrated comfort control algorithm with cooling, ventilation, and humidification systems based on occupancy status. Build. Environ. 2018, 133, 246–264. [Google Scholar] [CrossRef]
- Yuan, Y.; Li, X.; Liu, Z.; Guan, X. Occupancy Estimation in Buildings Based on Infrared Array Sensors Detection. IEEE Sens. J. 2020, 20, 1043–1053. [Google Scholar] [CrossRef]
- Chen, Z. Data Processing for Device-Free Fine-Grained Occupancy Sensing Using Infrared Sensors. Ph.D. Thesis, Texas A&M University, Ann Arbor, MI, USA, 2021. [Google Scholar]
- Wu, L.; Gou, F.; Wu, S.-T.; Wang, Y. SLEEPIR: Synchronized Low-Energy Electronically Chopped PIR Sensor for True Presence Detection. IEEE Sensors Lett. 2020, 4, 2500204. [Google Scholar] [CrossRef]
- Fayed, N.S.; Elmogy, M.M.; Atwan, A.; El-Daydamony, E. Efficient Occupancy Detection System Based on Neutrosophic Weighted Sensors Data Fusion. IEEE Access 2022, 10, 13400–13427. [Google Scholar] [CrossRef]
- Lin, J.; Zhu, L.; Chen, W.M.; Wang, W.C.; Gan, C.; Han, S. On-Device Training Under 256KB Memory. arXiv 2022, arXiv:2206.15472. [Google Scholar]
- Azizi, S.; Rabiee, R.; Nair, G.; Olofsson, T. Effects of Positioning of Multi-Sensor Devices on Occupancy and Indoor Environmental Monitoring in Single-Occupant Offices. Energies 2021, 14, 6296. [Google Scholar] [CrossRef]
- Ebadat, A.; Bottegal, G.; Varagnolo, D.; Wahlberg, B.; Hjalmarsson, H.; Johansson, K.H. Blind identification strategies for room occupancy estimation. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 1315–1320. [Google Scholar] [CrossRef]
- Becker, V.; Kleiminger, W. Exploring zero-training algorithms for occupancy detection based on smart meter measurements. Comput. Sci.-Res. Dev. 2018, 33, 25–36. [Google Scholar] [CrossRef]
- Jin, M.; Jia, R.; Kang, Z.; Konstantakopoulos, I.; Spanos, C. PresenceSense: Zero-training Algorithm for Individual Presence Detection Based on Power Monitoring. In Proceedings of the BuildSys 2014-1st ACM Conference on Embedded Systems for Energy-Efficient Buildings, Memphis, TN, USA, 3 November 2014. [Google Scholar] [CrossRef]
- Filho, C.P.; Marques, E.; Chang, V.; dos Santos, L.; Bernardini, F.; Pires, P.F.; Ochi, L.; Delicato, F.C. A Systematic Literature Review on Distributed Machine Learning in Edge Computing. Sensors 2022, 22, 2665. [Google Scholar] [CrossRef] [PubMed]
- Cai, H.; Gan, C.; Zhu, L.; Han, S. TinyTL: Reduce Memory, Not Parameters for Efficient On-Device Learning. In Proceedings of the Neural Information Processing Systems 2020, Online, 6–12 December 2020. [Google Scholar]
- Hayes, T.; Kanan, C. Online Continual Learning for Embedded Devices. arXiv 2022, arXiv:2203.10681. [Google Scholar]
- Petersen, S.; Pedersen, T.H.; Nielsen, K.U.; Knudsen, M.D. Establishing an image-based ground truth for validation of sensor data-based room occupancy detection. Energy Build. 2016, 130, 787–793. [Google Scholar] [CrossRef]
- Hobson, B.; Lowcay, D.; Gunay, H.B.; Ashouri, A.; Newsham, G.R. Opportunistic occupancy-count estimation using sensor fusion: A case study. Build. Environ. 2019, 159, 106154. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).