


When Operation Technology Meets Information Technology: Challenges and Opportunities

 ,
,  , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
1.1. Open Challenges
- Old Attacks: Attacks that were no cause of concern due to the close nature of the OT networks and mitigated years ago in IT systems; thus, they tend to be forgotten and risk resurfacing and causing damage through the new interconnections.
- Legacy Components: Many OT networks are built using old and legacy devices, architectures, or programming technologies, which are difficult to interact with, upgrade, or maintain [12].
- Different Wrappers: Legacy and custom networks entail the development of different wrappers. Standardization efforts [13] are still fighting their way toward a more systematic and uniform approach to basic cyber-security features in manufacturing connected systems.
2. Related Works
3. State of the Art in I4.0
3.1. BaSyx
- End-to-end digitization: Realized by providing logic communication objects to all connected devices through the Virtual Automation Bus (VAB), which bridges communication networks by mapping well-defined network operations to network-specific primitives [33].
- Changeable production: Changes in automation processes require developers to adapt Programmable Logic Controller (PLC) programs and require testing of all changes. In addition, every problem that occurs delays the restart of a production line, and is therefore highly expensive. The service-oriented architecture of BaSys, which encapsulates PLC programs as reusable services, acts as an enabler to realize changeable production [16]. As a result, a change in the production process is not reflected by a change in the PLC programs. Thus, architecture changes in production processes can be virtually tested, reducing downtime to a minimum.
- Integrating live process data from assets: Digital twins are complete digital representations of physical assets; therefore, they must reflect the current state of an asset. Eclipse BaSyx connects digital twins to real-world assets with data provider components that communicate through a variety of IoT and IIoT protocols, such as OPC UA, MQTT, and HTTP/REST.
- Unified interfaces to assets: Digital twins need to integrate different kinds of assets. Eclipse BaSyx implements bidirectional digital twins, i.e., a digital twin that both represents the current state of an asset and realizes a unified interface to that asset.
3.2. Ultra-Low Latency
- Time Synchronization: IEEE 802.1AS Time Synchronization for Time-Sensitive Applications (AS).
- Scheduling: IEEE 802.1Qbv Enhancements to Traffic Scheduling: Time-Aware Shaper (TAS).
- Control and Orchestration: IEEE 802.1Qca Path Control and Reservation (PCR).
- Policing and Redundancy: IEEE 802.1Qci Per-Stream Filtering and Policing (PSFP).
4. A typical Use Case
- BM—Breakdown Maintenance -> sudden failure;
- TBM—Time-Based Maintenance -> performed on a calendar schedule;
- CBM—Condition-based Maintenance -> in advance of the failure.
- On one hand, an external entity must orchestrate which communication capability should be active in which asset in order to guarantee the proper service configuration;
- On the other hand, an external entity must interact with the assets to perform the actions required to enable and configure the communication capabilities.
4.1. Case Study
4.2. Prototype Enabled by AAS
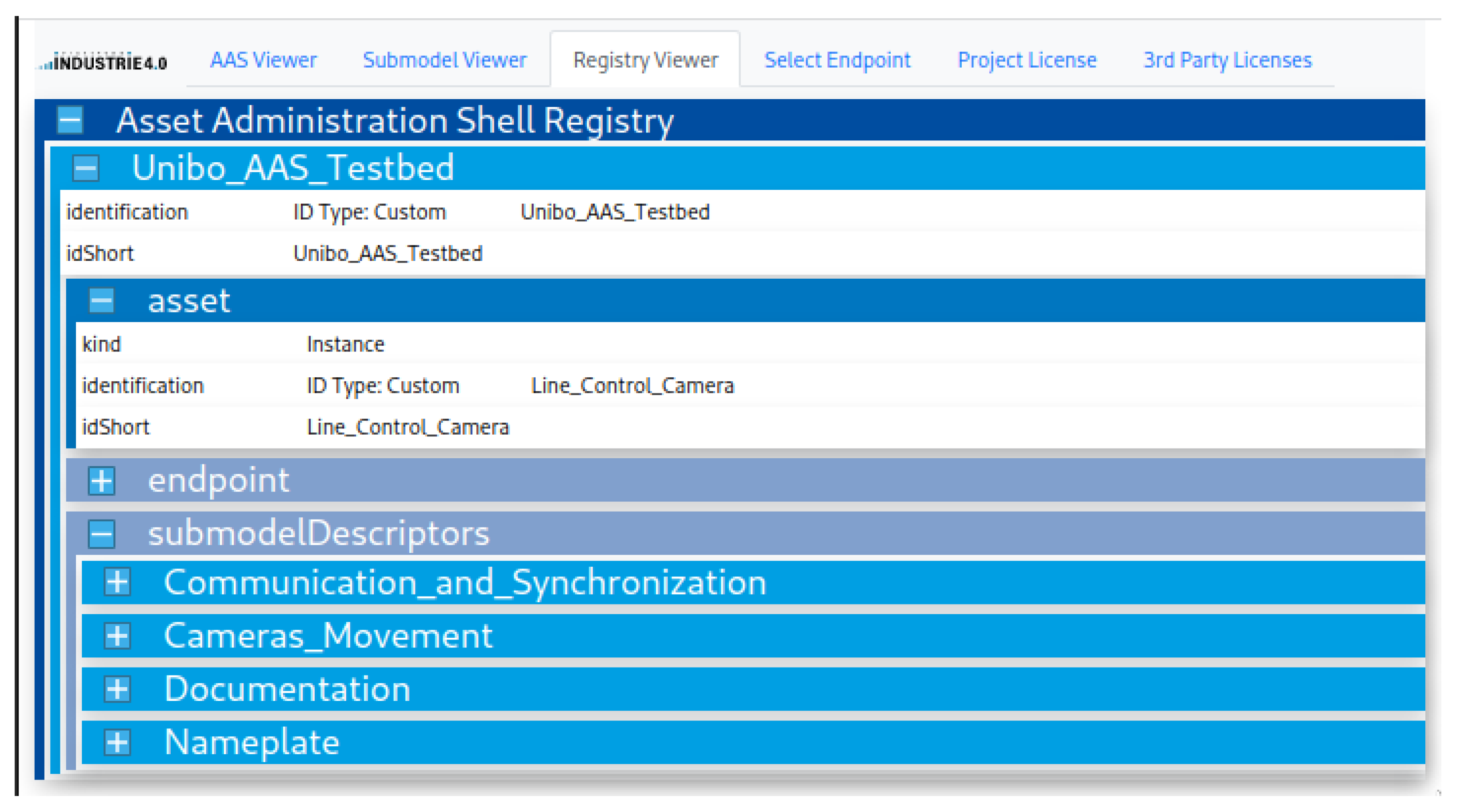
- AAS Registry;
- AAS Web Interface;
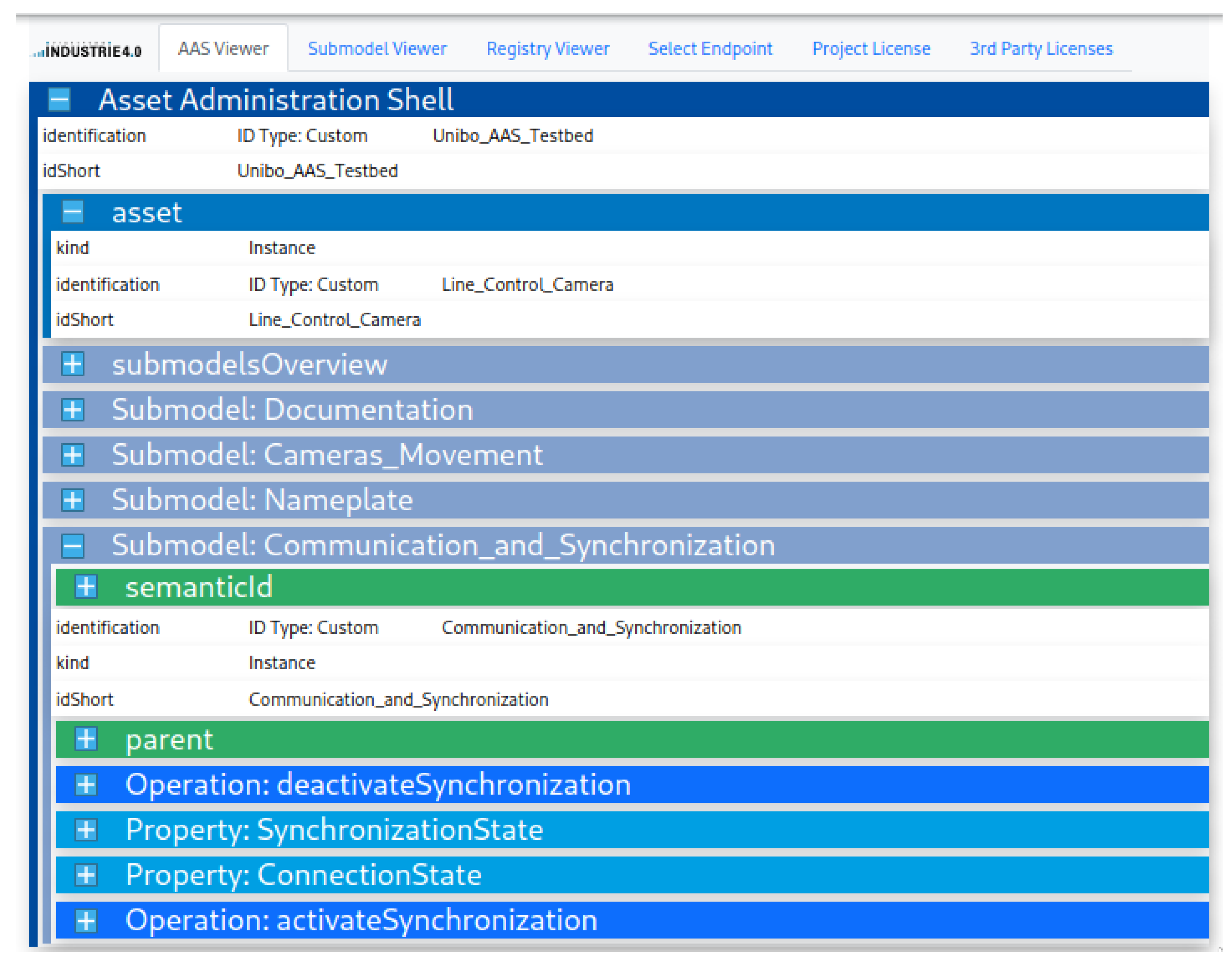
- AAS for OPC UA;
- OPC UA server;
- Industrial-grade networked cameras.
- RAM 32 GB;
- Dual AMD EPYC 72F3 3.7 GHz, 8C/16T, 256M Cache;
- 480 GB SSD SATA Read Intensive 6 Gbps;
- NIC 2 × 1 Gb Onboard LOM, MLK V2.
- Dell EMC Edge Gateway 3200, Atom 4C Elkhart Lake, 4G, 64G, Ubuntu, TPM;
- DDR4 SO-DIMM socket, 8 GB DDR4;
- 2× GbE (1× 2.5 GbE).
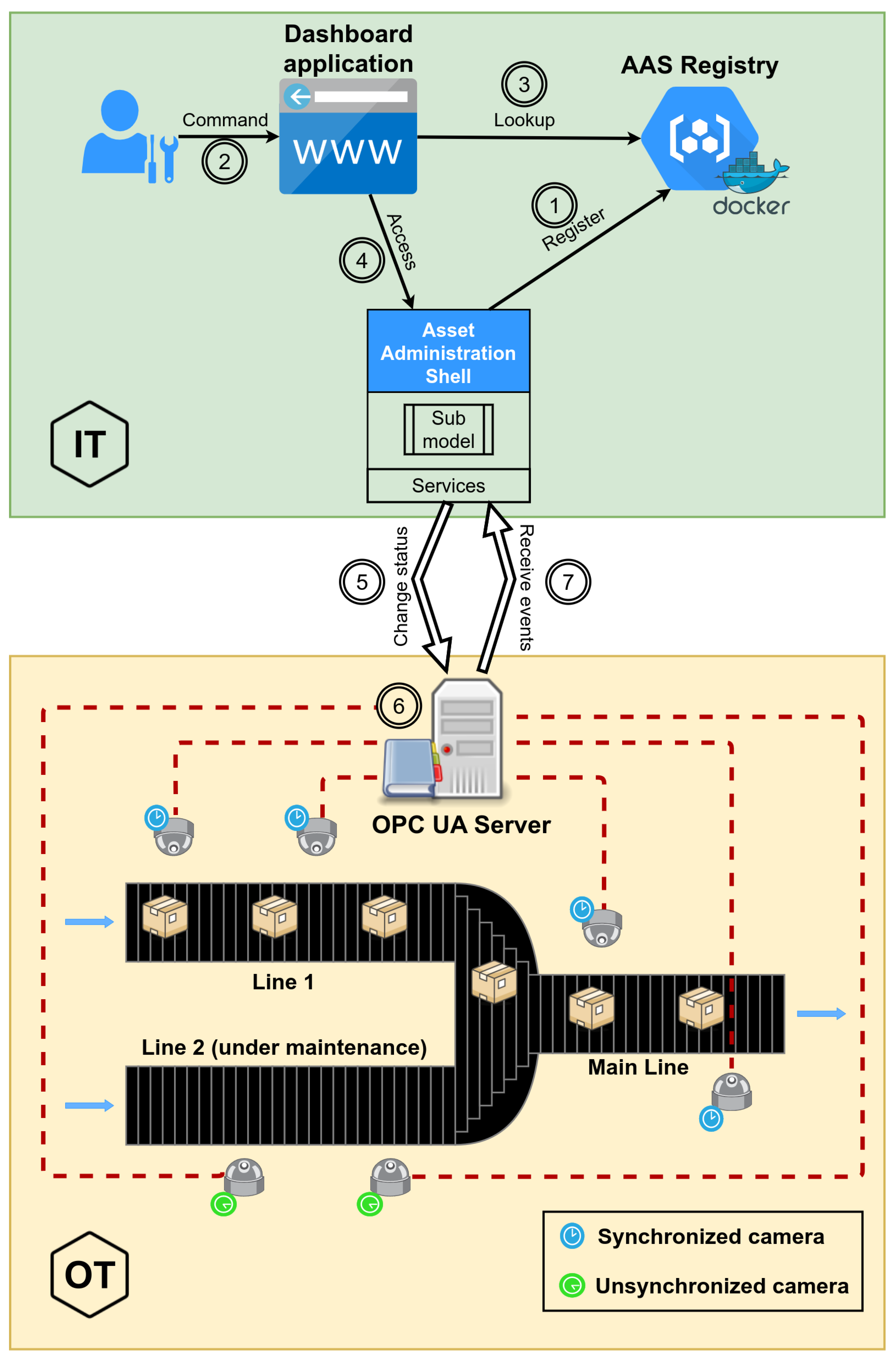
- ⓵
- As a prerequisite, the AAS representing the OPC UA server must be registered at the AAS Registry.
- ⓶
- A human operator has to start the maintenance process by accessing the AAS Web Interface. It is important to highlight that this is the only interaction that involves human intervention.
- ⓷
- The BaSyx framework accesses the AAS Registry and performs a lookup of the AAS representing the OPC UA server.
- ⓸
- The BaSyx framework accesses the AAS representing the OPC UA server.
- ⓹
- The AAS now requests the new configuration of cameras from the OPC UA server.
- ⓺
- The previous step triggers a recalculation of the PTP hierarchy, which reconfigures the clocks of the cameras, synchronizing only the ones that do not belong to the line put under maintenance.
- ⓻
- At the end of the process, the AAS receives images and data only from the synchronized cameras. This information is then exploited by business logic.
5. Discussion and Limitations of the Study
- Synchronization of computers connected to a network using PTP, while the cameras are still synchronized using NTP with the computers. Hence, the synchronization procedure involves the synchronization of multiple computers connected in a network rather than the cameras.
- Synchronization through a master–slave architecture, where each camera connects to the computer through a frame grabber card. The clocks of the master computers in the architecture are synchronized using PTP.
6. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| I4.0 | Industry 4.0 |
| OT | Operational Technology |
| IT | Information Technology |
| SMEs | Small and medium-sized enterprises |
| RAMI 4.0 | Reference Architecture Model for Industry 4.0 |
| AAS | Asset Administration Shell |
| OPC UA | Open Platform Communications Unified Architecture |
| TSN | Time-sensitive Networking |
| FPGA | Field-Programmable Gate Array |
| ASIC | Application-Specific Integrated Circuits |
| VAB | Virtual Automation Bus |
| PLC | Programmable Logic Controller |
| IEC | International Electrotechnical Commission |
| IoT | Internet of Things |
| IIoT | Industrial Internet of Things |
| MQTT | Message Queue Telemetry Transport |
| REST | Representational state transfer |
| HTTP | Hypertext Transfer Protocol |
| M2M | Machine-to-machine |
| CPS | Cyber-Physical Systems |
| ULL | Ultra-Low Latency |
| SIL | Safety Integrity Levels |
| IEEE | Institute of Electrical and Electronic Engineers |
| QoS | Quality of Service |
| PTP | Precision Time Protocol |
| gPTP | Generic Precision Time Protocol |
| SDK | Software Development Kit |
| NTP | Network Time Protocol |
| MTTR | Mean Time To Repair |
References
- Lu, Y. Industry 4.0: A survey on technologies, applications and open research issues. J. Ind. Inf. Integr. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Mourtzis, D. Design and Operation of Production Networks for Mass Personalization in the Era of Cloud Technology; Elsevier: Amsterdam, The Netherlands, 2022. [Google Scholar]
- Nascimento, D.L.M.; Alencastro, V.; Quelhas, O.L.G.; Caiado, R.G.G.; Garza-Reyes, J.A.; Rocha-Lona, L.; Tortorella, G. Exploring Industry 4.0 technologies to enable circular economy practices in a manufacturing context: A business model proposal. J. Manuf. Technol. Manag. 2018, 30, 607–627. [Google Scholar] [CrossRef]
- Beier, G.; Niehoff, S.; Xue, B. More sustainability in industry through industrial internet of things? Appl. Sci. 2018, 8, 219. [Google Scholar] [CrossRef]
- Mourtzis, D. Simulation in the design and operation of manufacturing systems: State of the art and new trends. Int. J. Prod. Res. 2020, 58, 1927–1949. [Google Scholar] [CrossRef]
- Müller, J.M.; Buliga, O.; Voigt, K.I. Fortune favors the prepared: How SMEs approach business model innovations in Industry 4.0. Technol. Forecast. Soc. Chang. 2018, 132, 2–17. [Google Scholar] [CrossRef]
- Kim, B.; Kim, S.; Teijgeler, H.; Lee, J.; Lee, J.Y.; Lim, D.; Suh, H.W.; Mun, D. Use of Asset Administration Shell Coupled with ISO 15926 to Facilitate the Exchange of Equipment Condition and Health Status Data of a Process Plant. Processes 2022, 10, 2155. [Google Scholar] [CrossRef]
- Polak-Sopinska, A.; Wisniewski, Z.; Walaszczyk, A.; Maczewska, A.; Sopinski, P. Impact of industry 4.0 on occupational health and safety. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Washington, DC, USA, 24–28 July 2019; pp. 40–52. [Google Scholar]
- Hemsley, K.E.; Fisher, E. History of Industrial Control System Cyber Incidents; 2018. Available online: https://www.osti.gov/servlets/purl/1505628 (accessed on 29 December 2022).
- Snow, J.; Drozhzhin, A.; Kaminsky, S.; Starikova, A.; Team, K.; Grustniy, L. Top 5 Most Notorious Cyberattacks; Technical Report; Kaspersky: 2018. Available online: https://www.kaspersky.com/blog/five-most-notorious-cyberattacks/24506 (accessed on 29 December 2022).
- Hahn, A. Operational technology and information technology in industrial control systems. In Cyber-security of SCADA and Other Industrial Control Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 51–68. [Google Scholar]
- Miller, T.; Staves, A.; Maesschalck, S.; Sturdee, M.; Green, B. Looking back to look forward: Lessons learnt from cyber-attacks on Industrial Control Systems. Int. J. Crit. Infrastruct. Prot. 2021, 35, 100464. [Google Scholar] [CrossRef]
- Piggin, R. Development of industrial cyber security standards: IEC 62443 for SCADA and Industrial Control System security. In Proceedings of the IET Conference on Control and Automation 2013: Uniting Problems and Solutions, IET, Birmingham, UK, 4–5 June 2013; pp. 1–6. [Google Scholar]
- Bridging the gap between Operational Technology and Information Technology. White Paper, Red Hat. 2016. Available online: https://www.eurotech.com/attachment/download?id=1711 (accessed on 29 December 2022).
- Garimella, P.K. IT-OT integration challenges in utilities. In Proceedings of the 2018 IEEE 3rd International Conference on Computing, Communication and Security (ICCCS), Kathmandu, Nepal, 25–27 October 2018; pp. 199–204. [Google Scholar]
- Kannoth, S.; Hermann, J.; Damm, M.; Rübel, P.; Rusin, D.; Jacobi, M.; Mittelsdorf, B.; Kuhn, T.; Antonino, P.O. Enabling SMEs to Industry 4.0 Using the BaSyx Middleware: A Case Study. In Proceedings of the Software Architecture; Biffl, S., Navarro, E., Löwe, W., Sirjani, M., Mirandola, R., Weyns, D., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 277–294. [Google Scholar]
- Casado, M.G.; Eichelberger, H. Industry 4.0 Resource Monitoring - Experiences With Micrometer and Asset Administration Shells. In Proceedings of the CEUR-WS Proceedings of Symposium on Software Performance 2021 (SSP’21), Leipzig, Germany, 9–10 November 2021. [Google Scholar]
- Denker, J.; Iannino, V.; Laudenberg, C.; Tenner, A.; Jelali, M.; Daun, M. Improved Temperature Monitoring and Control of Production Lines in Casting through BaSyx Framework and Edge Intelligence. In Proceedings of the 2022 International Joint Conference on Neural Networks (IJCNN), Padua, Italy, 18–23 July 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Ye, X.; Song, W.S.; Hong, S.H.; Kim, Y.C.; Yoo, N.H. Toward Data Interoperability of Enterprise and Control Applications via the Industry 4.0 Asset Administration Shell. IEEE Access 2022, 10, 35795–35803. [Google Scholar] [CrossRef]
- Nagrath, V.; Blender, T.; Shaik, N.; Schlegel, C. Industry 4.0 Asset Administration Shell (AAS): Interoperable Skill-Based Service-Robots. 2022. Available online: https://doi.org/10.48550/ARXIV.2208.01273 (accessed on 29 December 2022).
- Hosseini, A.M.; Sauter, T.; Kastner, W. A Safety and Security Reference Architecture for Asset Administration Shell Design. In Proceedings of the 2022 IEEE 18th International Conference on Factory Communication Systems (WFCS), Pavia, Italy, 27–29 April 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Noda, A.; Yamakawa, Y.; Ishikawa, M. Frame synchronization for networked high-speed vision systems. In Proceedings of the SENSORS, 2014, Valencia, Spain, 2–5 November 2014; pp. 269–272. [Google Scholar] [CrossRef]
- Bosi, F.; Corradi, A.; Di Modica, G.; Foschini, L.; Montanari, R.; Patera, L.; Solimando, M. Enabling smart manufacturing by empowering data integration with industrial IoT support. In Proceedings of the 2020 International Conference on Technology and Entrepreneurship (ICTE), Bologna, Italy, 21–23 September 2020; pp. 1–8. [Google Scholar]
- Fan, X.; Fan, K.; Wang, Y.; Zhou, R. Overview of cyber-security of industrial control system. In Proceedings of the 2015 International Conference on Cyber Security of Smart Cities, Industrial Control System and Communications (SSIC), Shanghai, China, 5–7 August 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Patera, L.; Garbugli, A.; Bujari, A.; Scotece, D.; Corradi, A. A Layered Middleware for OT/IT Convergence to Empower Industry 5.0 Applications. Sensors 2021, 22, 190. [Google Scholar] [CrossRef]
- Kim, J.H. A review of cyber-physical system research relevant to the emerging IT trends: Industry 4.0, IoT, big data, and cloud computing. J. Ind. Integr. Manag. 2017, 2, 1750011. [Google Scholar] [CrossRef]
- Grasselli, C.; Melis, A.; Rinieri, L.; Berardi, D.; Gori, G.; Sadi, A.A. An Industrial Network Digital Twin for enhanced security of Cyber-Physical Systems. In Proceedings of the 2022 International Symposium on Networks, Computers and Communications (ISNCC), Shenzhen, China, 19–22 July 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Hankel, M.; Rexroth, B. The reference architectural model industrie 4.0 (rami 4.0). Zvei 2015, 2, 4–9. [Google Scholar]
- Cavalieri, S.; Salafia, M.G.; Scroppo, M.S. Integrating OPC UA with web technologies to enhance interoperability. Comput. Stand. Interfaces 2019, 61, 45–64. [Google Scholar] [CrossRef]
- Hoppe, S. OPC UA Interoperability for Industrie 4.0 and the Internet of Things; Brochure Version 11; OPC Foundation: Scottsdale, AZ, USA, 2020. [Google Scholar]
- Jiang, X.; Fischione, C.; Pang, Z. Poster: Low Latency Networking for Industry 4.0. In Proceedings of the EWSN, Uppsala, Sweden, 20–22 February 2017; pp. 212–213. [Google Scholar]
- Eclipse BaSyx Project. 2020. Available online: https://wiki.eclipse.org/BaSyx (accessed on 29 December 2022).
- Kuhn, T.; Sadikow, S.; Oliveira Antonino, P. A Service-Based Production Ecosystem Architecture for Industrie 4.0. KI - Künstliche Intell. 2019, 33, 163–169. [Google Scholar] [CrossRef]
- Marcon, P.; Diedrich, C.; Zezulka, F.; Schröder, T.; Belyaev, A.; Arm, J.; Benesl, T.; Bradac, Z.; Vesely, I. The Asset Administration Shell of Operator in the Platform of Industry 4.0. In Proceedings of the 2018 18th International Conference on Mechatronics—Mechatronika (ME), Brno, Czech Republic, 5–7 December 2018; pp. 1–5. [Google Scholar]
- Gampig, J.; Terzimehić, T.; Dorofeev, K. PLC Integration into Industry 4.0 Middleware: Function Block Library for the Interaction with REST and OPC UA Asset Administration Shells. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Gutiérrez, M.; Ademaj, A.; Steiner, W.; Dobrin, R.; Punnekkat, S. Self-configuration of IEEE 802.1 TSN networks. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Gall, H. Functional safety IEC 61508 / IEC 61511 the impact to certification and the user. IEEE Comput. Soc. 2008, 1027–1031. Available online: https://sci-hub.ru/10.1109/aiccsa.2008.4493673 (accessed on 29 December 2022).
- Leyrer, T. Time sensitive networks for industry 4.0. In Proceedings of the 2017 30th IEEE International System-on-Chip Conference (SOCC), Munich, Germany, 5–8 September 2017; pp. 1–2. [Google Scholar] [CrossRef]
- Wollschlaeger, M.; Sauter, T.; Jasperneite, J. The Future of Industrial Communication: Automation Networks in the Era of the Internet of Things and Industry 4.0. IEEE Ind. Electron. Mag. 2017, 11, 17–27. [Google Scholar] [CrossRef]
- Finn, N. Introduction to Time-Sensitive Networking. IEEE Commun. Stand. Mag. 2018, 2, 22–28. [Google Scholar] [CrossRef]
- Garbugli, A.; Bujari, A.; Bellavista, P. End-to-end QoS Management in Self-Configuring TSN Networks. In Proceedings of the 2021 17th IEEE International Conference on Factory Communication Systems (WFCS), Linz, Austria, 9–11 June 2021; pp. 131–134. [Google Scholar] [CrossRef]
- Neagoe, T.; Cristea, V.; Banica, L. NTP versus PTP in com puter networks clock synchronization. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 1, pp. 317–362. [Google Scholar]
- Pozza, R. Ingegneria del Supporto Manutentivo. In Reinventare il Processo di Manutenzione; FrancoAngeli: Milan, Italy, 1999. [Google Scholar]
- Eidson, J.C.; Fischer, M.; White, J. IEEE-1588™ Standard for a precision clock synchronization protocol for networked measurement and control systems. In Proceedings of the Proceedings of the 34th Annual Precise Time and Time Interval Systems and Applications Meeting, Reston, VA, USA, 3–5 December 2002; pp. 243–254. [Google Scholar]
- Subramanyam, V.; Kumar, J.; Singh, S.N. Temporal synchronization framework of machine-vision cameras for high-speed steel surface inspection systems. J. Real-Time Image Process. 2022, 19, 445–461. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # of Devices | Human | AAS | ||
|---|---|---|---|---|
| Average | Standard Deviation | Average | Standard Deviation | |
| 1 | 97.85 | 4.04 | 0.45 | 0.27 |
| 2 | 136.75 | 3.91 | 0.66 | 0.34 |
| 3 | 190.98 | 6.42 | 5.89 | 0.27 |
| 4 | 266.11 | 7.43 | 5.58 | 0.31 |
| 5 | 371.20 | 3.16 | 5.65 | 0.25 |
| 6 | 518.12 | 5.28 | 5.87 | 0.31 |
| 7 | 722.38 | 5.45 | 5.49 | 0.31 |
| 8 | 1008.16 | 5.13 | 5.42 | 0.29 |
| 9 | 1406.41 | 6.74 | 5.09 | 0.28 |
| 10 | 1962.60 | 8.48 | 5.26 | 0.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Berardi, D.; Callegati, F.; Giovine, A.; Melis, A.; Prandini, M.; Rinieri, L. When Operation Technology Meets Information Technology: Challenges and Opportunities. Future Internet 2023, 15, 95. https://doi.org/10.3390/fi15030095
Berardi D, Callegati F, Giovine A, Melis A, Prandini M, Rinieri L. When Operation Technology Meets Information Technology: Challenges and Opportunities. Future Internet. 2023; 15(3):95. https://doi.org/10.3390/fi15030095
Chicago/Turabian StyleBerardi, Davide, Franco Callegati, Andrea Giovine, Andrea Melis, Marco Prandini, and Lorenzo Rinieri. 2023. "When Operation Technology Meets Information Technology: Challenges and Opportunities" Future Internet 15, no. 3: 95. https://doi.org/10.3390/fi15030095
APA StyleBerardi, D., Callegati, F., Giovine, A., Melis, A., Prandini, M., & Rinieri, L. (2023). When Operation Technology Meets Information Technology: Challenges and Opportunities. Future Internet, 15(3), 95. https://doi.org/10.3390/fi15030095