Signal Consensus in TSP of the Same Grid in Road Network

Abstract
:1. Introduction
2. Prior Knowledge and Consensus Algorithm
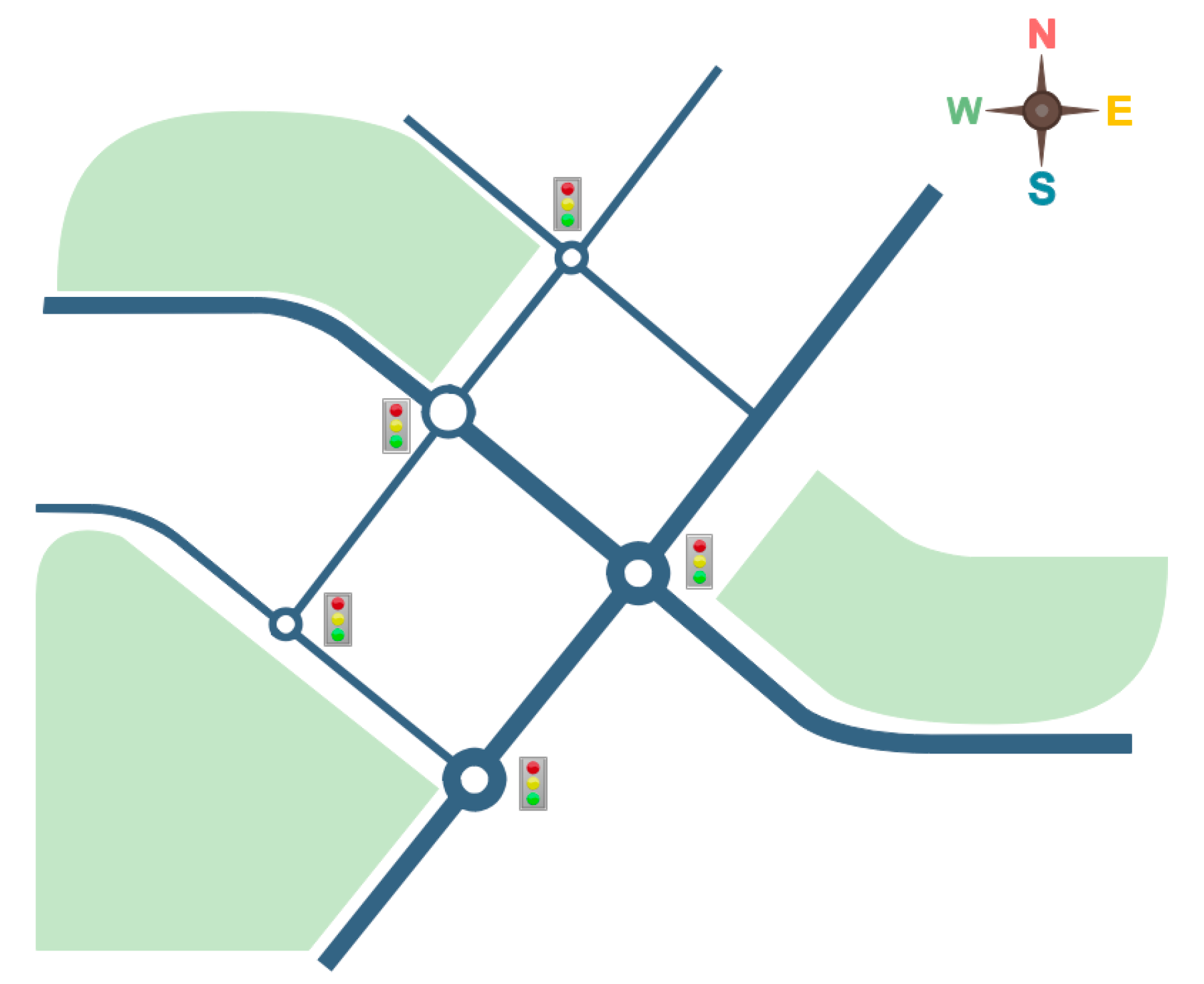
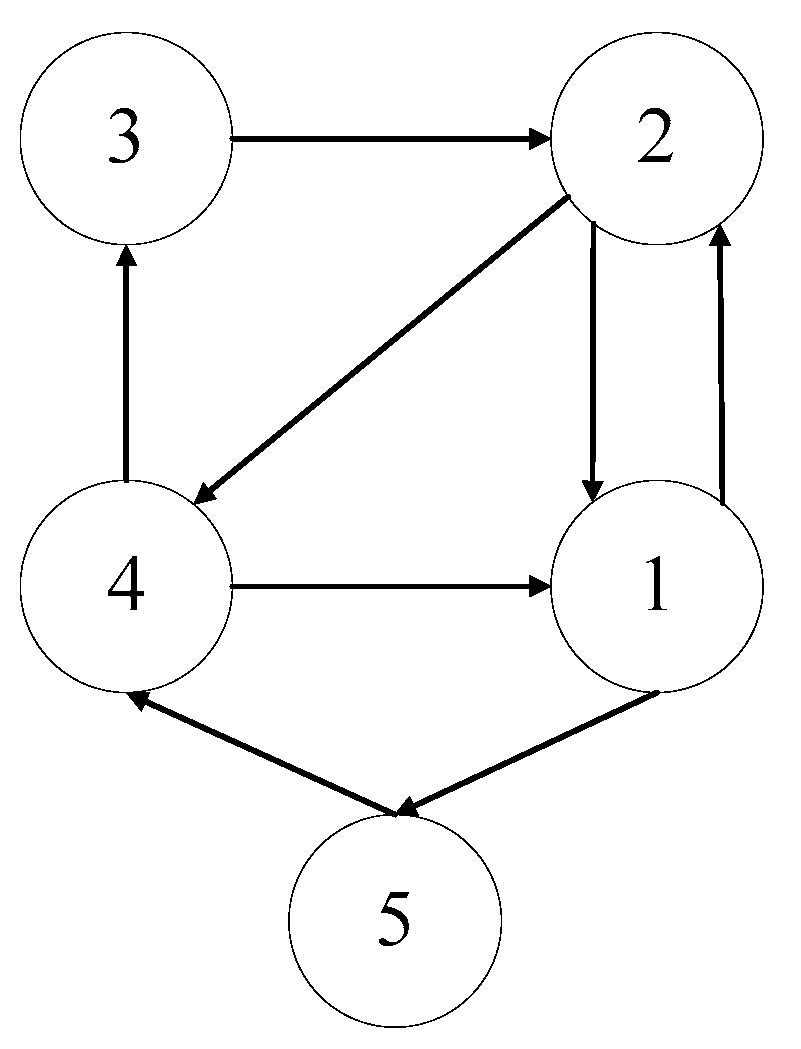
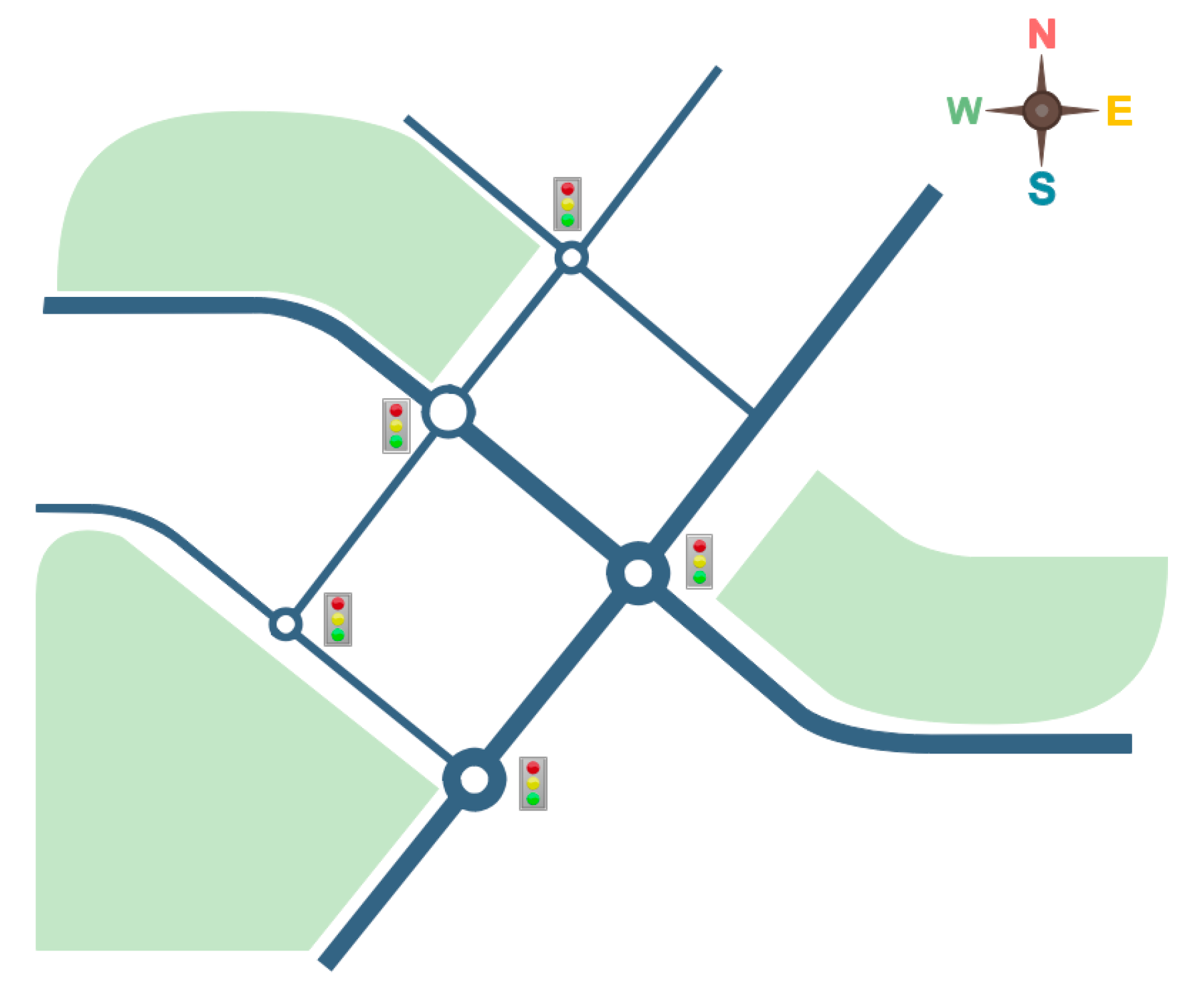
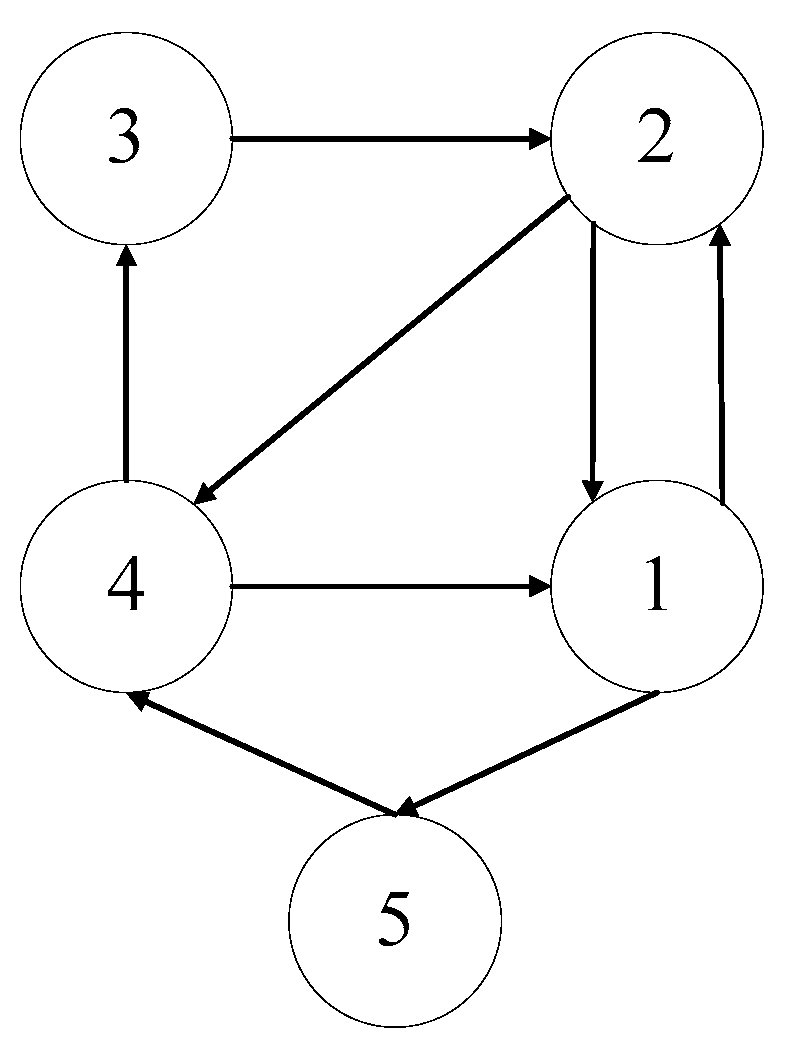
2.1. Prior Knowledge
2.2. Description of Consensus Algorithm
- (i)
- A consensus is asymptotically reached for all initial states;
- (ii)
- The group decision value is with ;
- (iii)
- If the direct graph is balanced, an average-consensus is asymptotically reached and [22].
3. Consensus Algorithm with Input Constraints
3.1. Description of Consensus Algorithm with Input Constrains
3.2. Stability Analysis of Consensus Algorithm with Input Constraints
4. Application of Consensus Algorithm with Input Constraints in TSP
5. Simulation Results
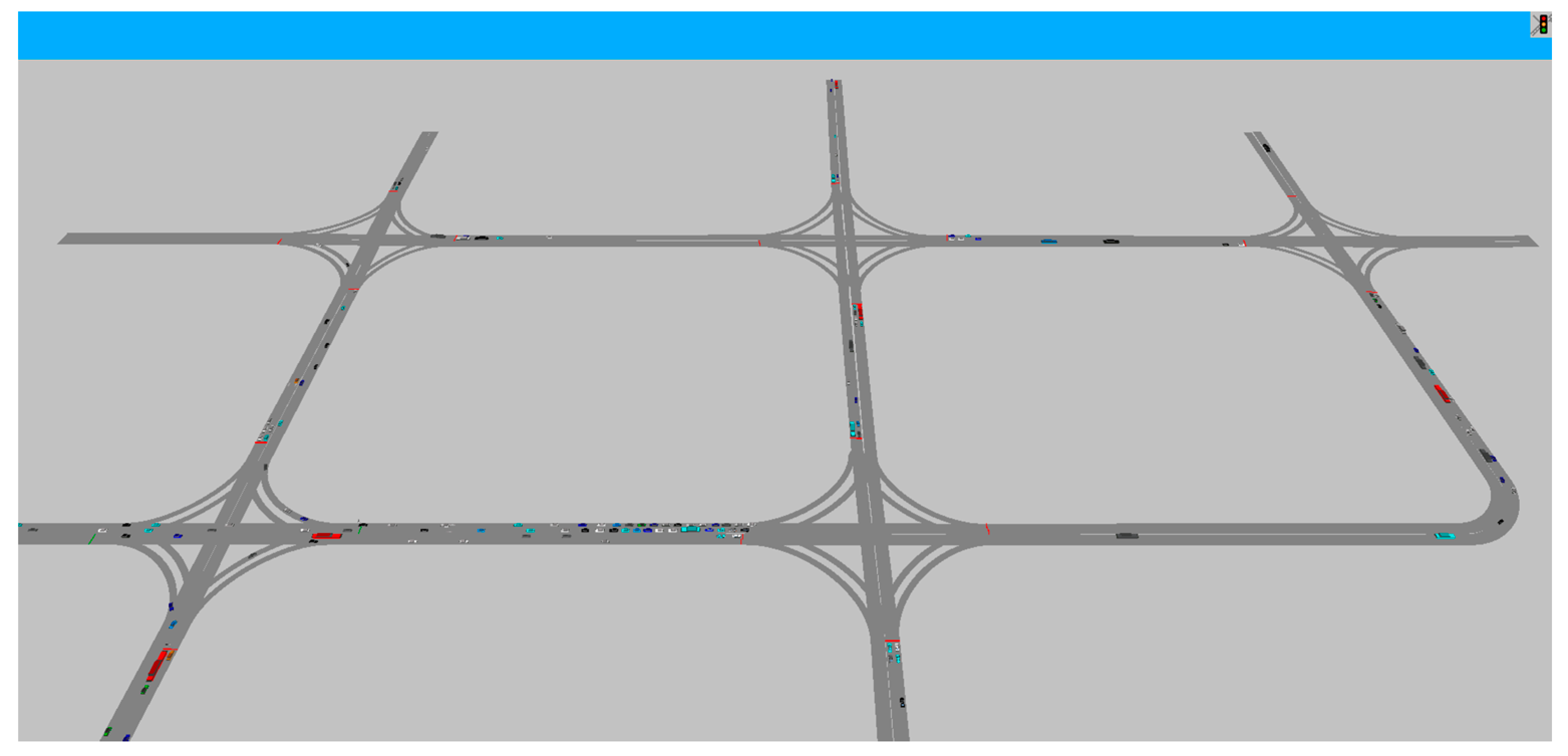
5.1. Mathematical Model Establishing
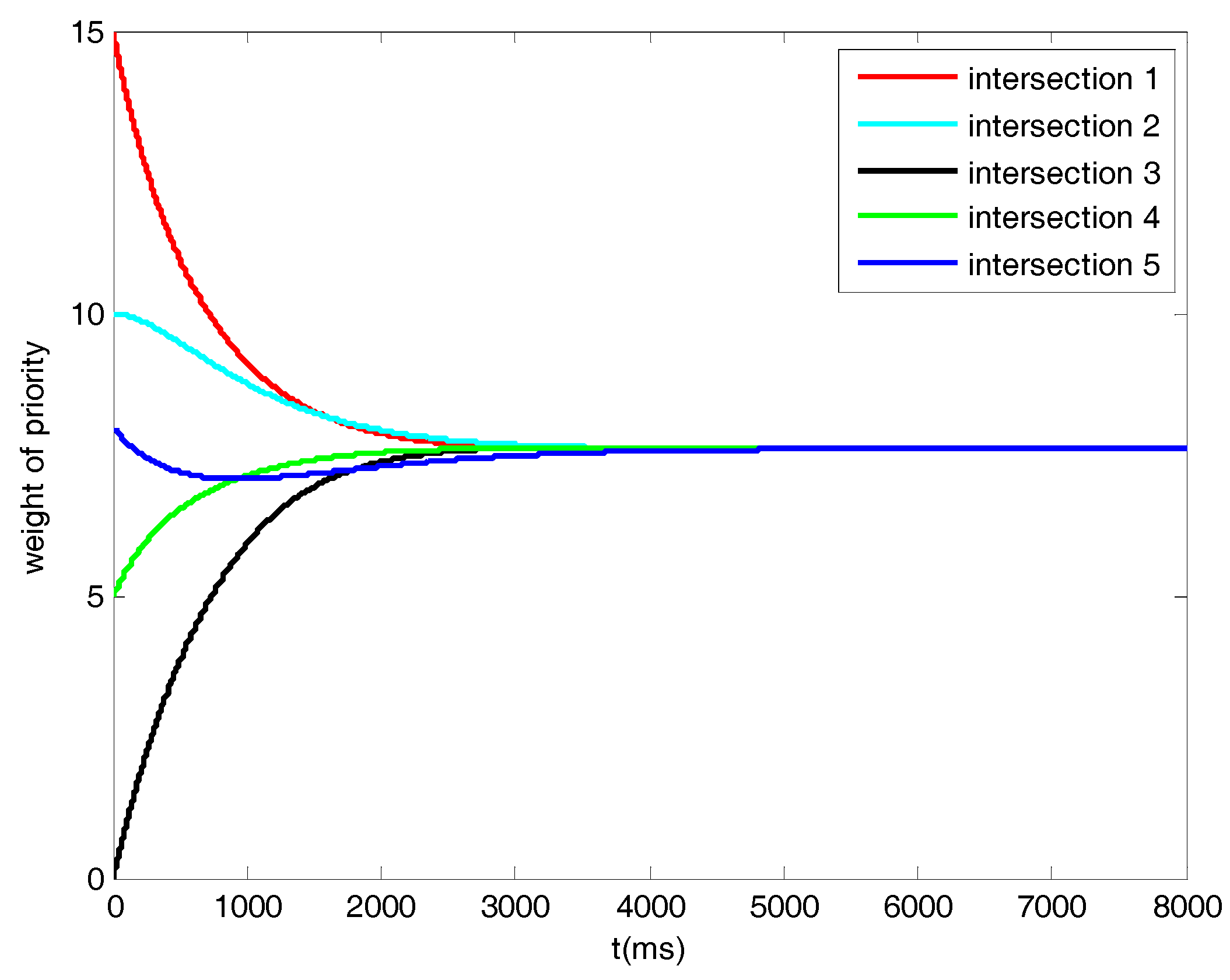
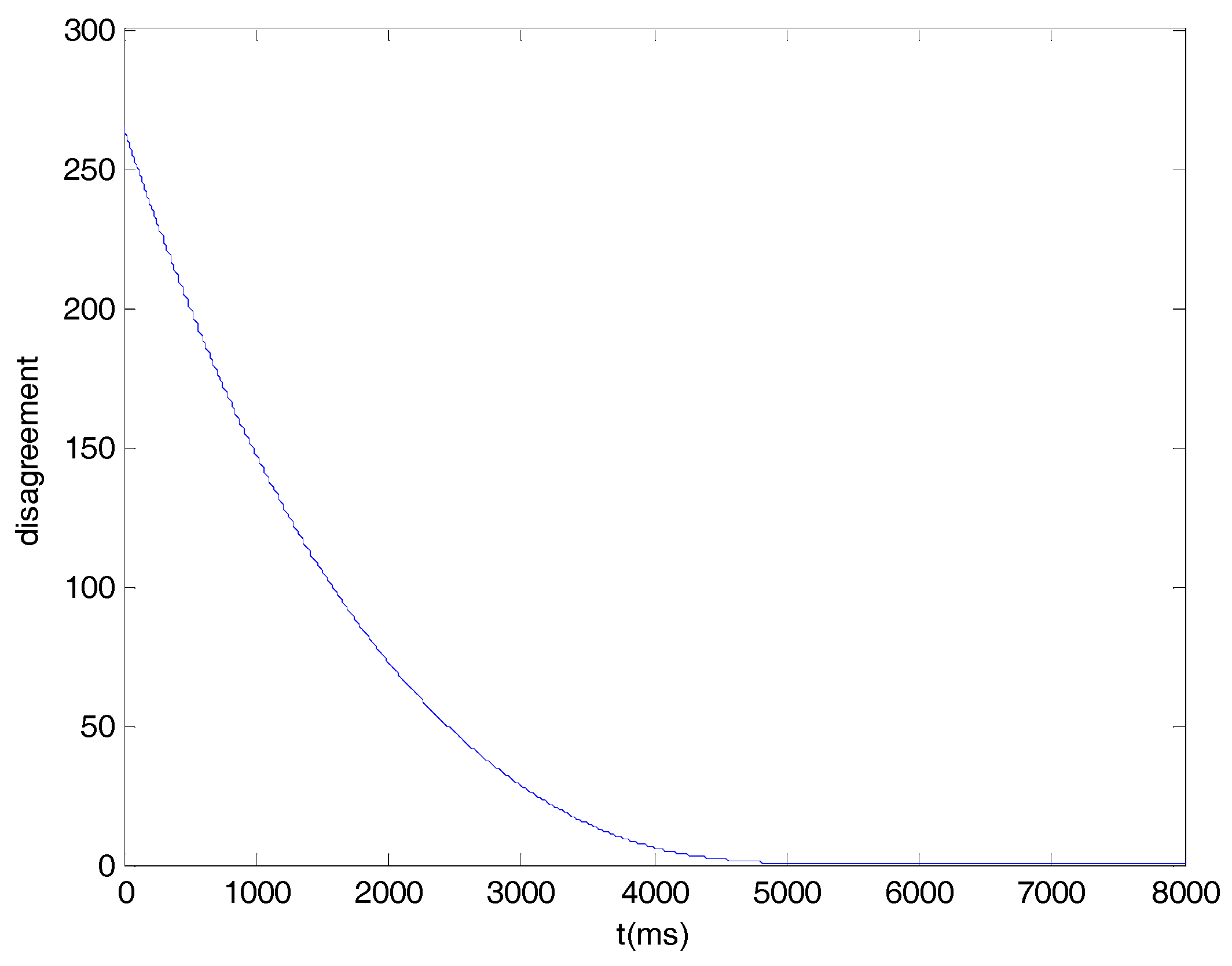
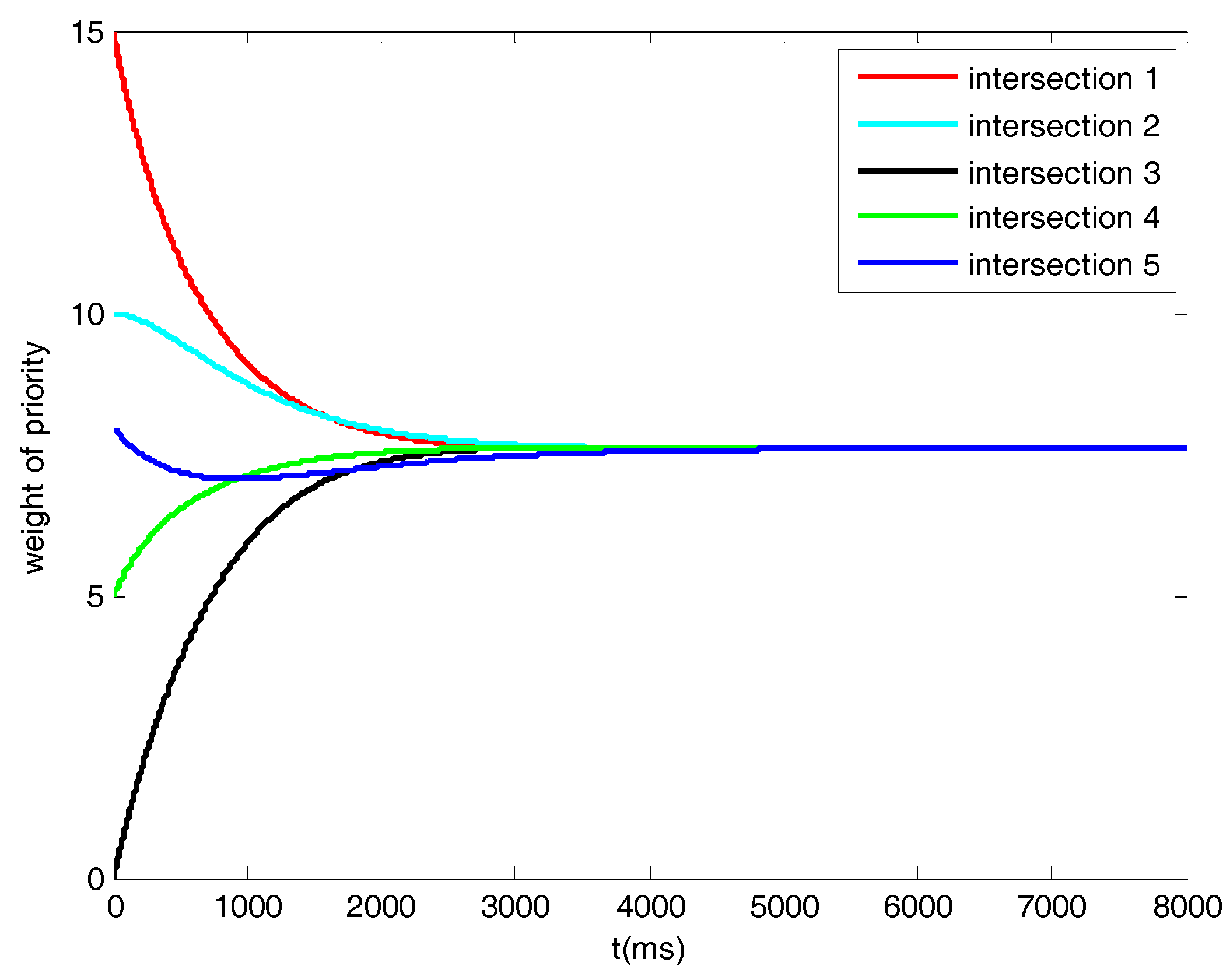
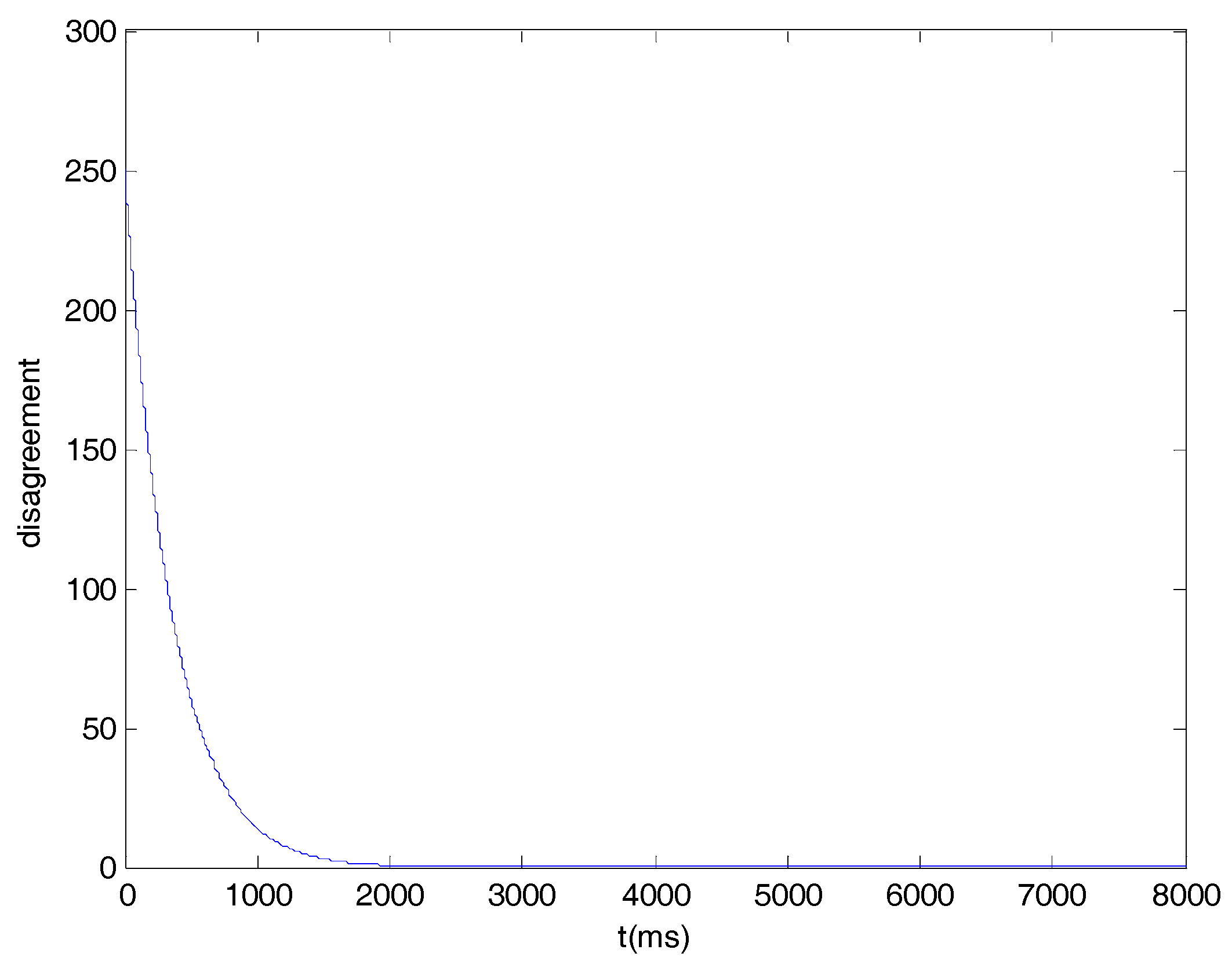
5.2. Simulation Results of Consensus Algorithm in TSP
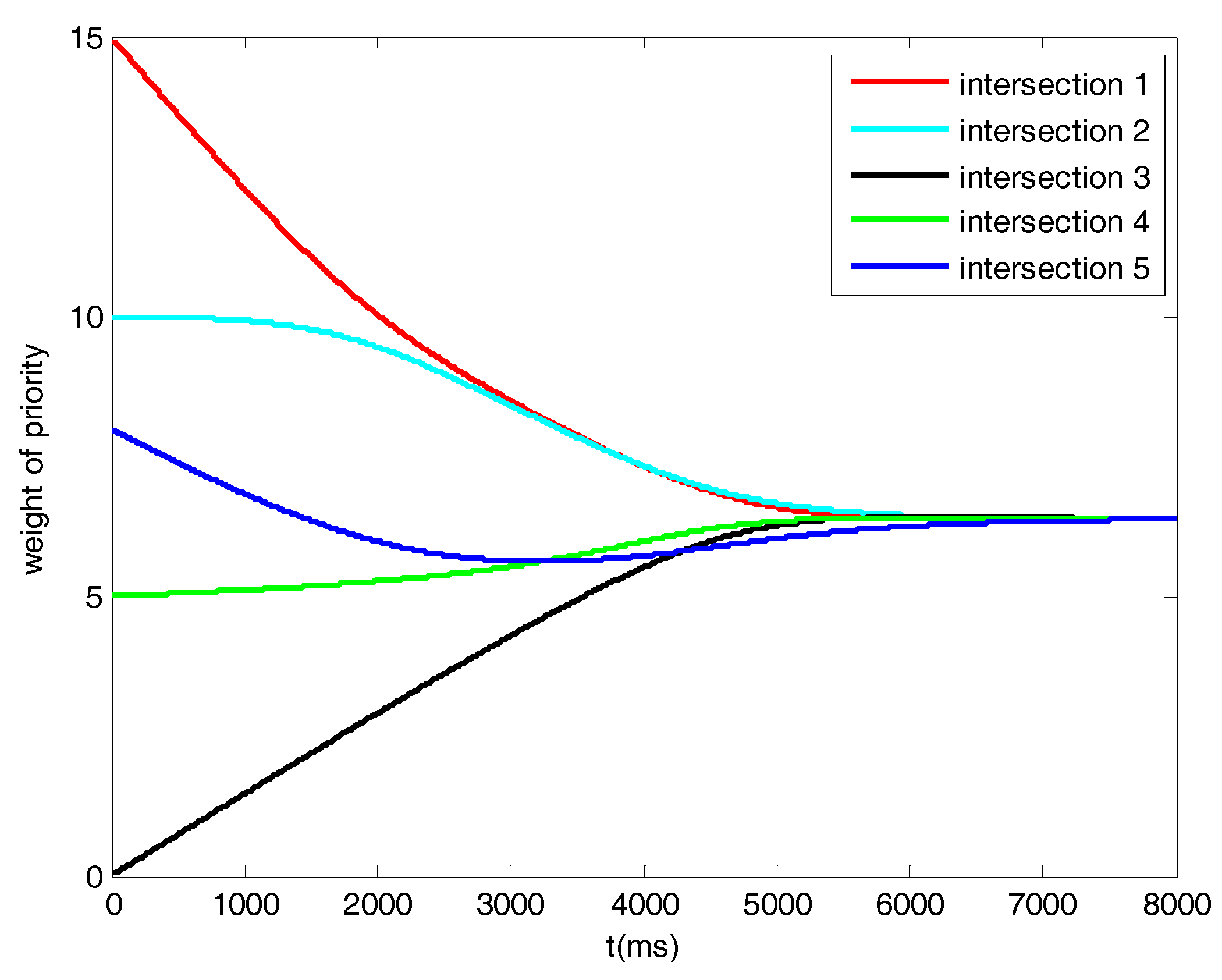
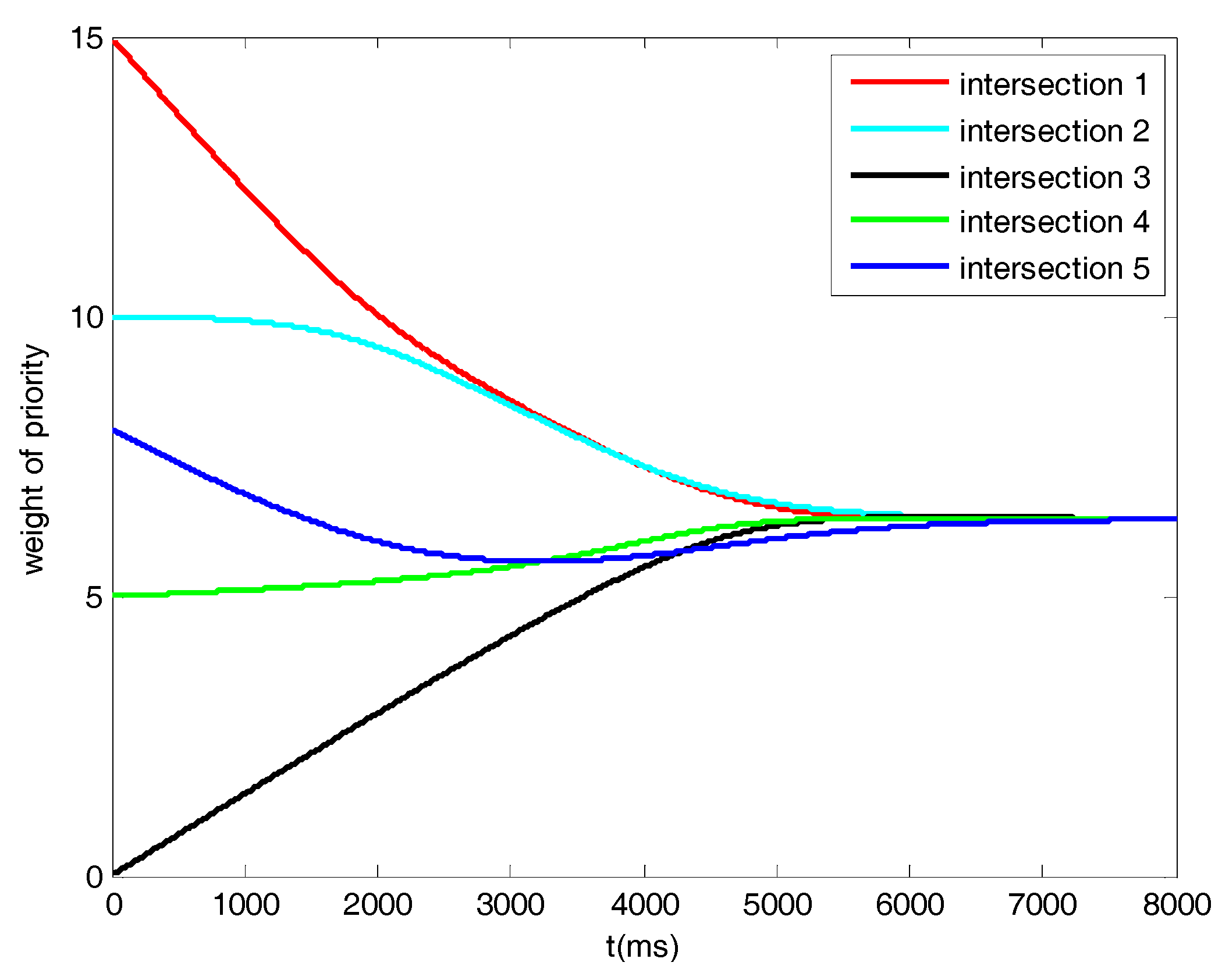
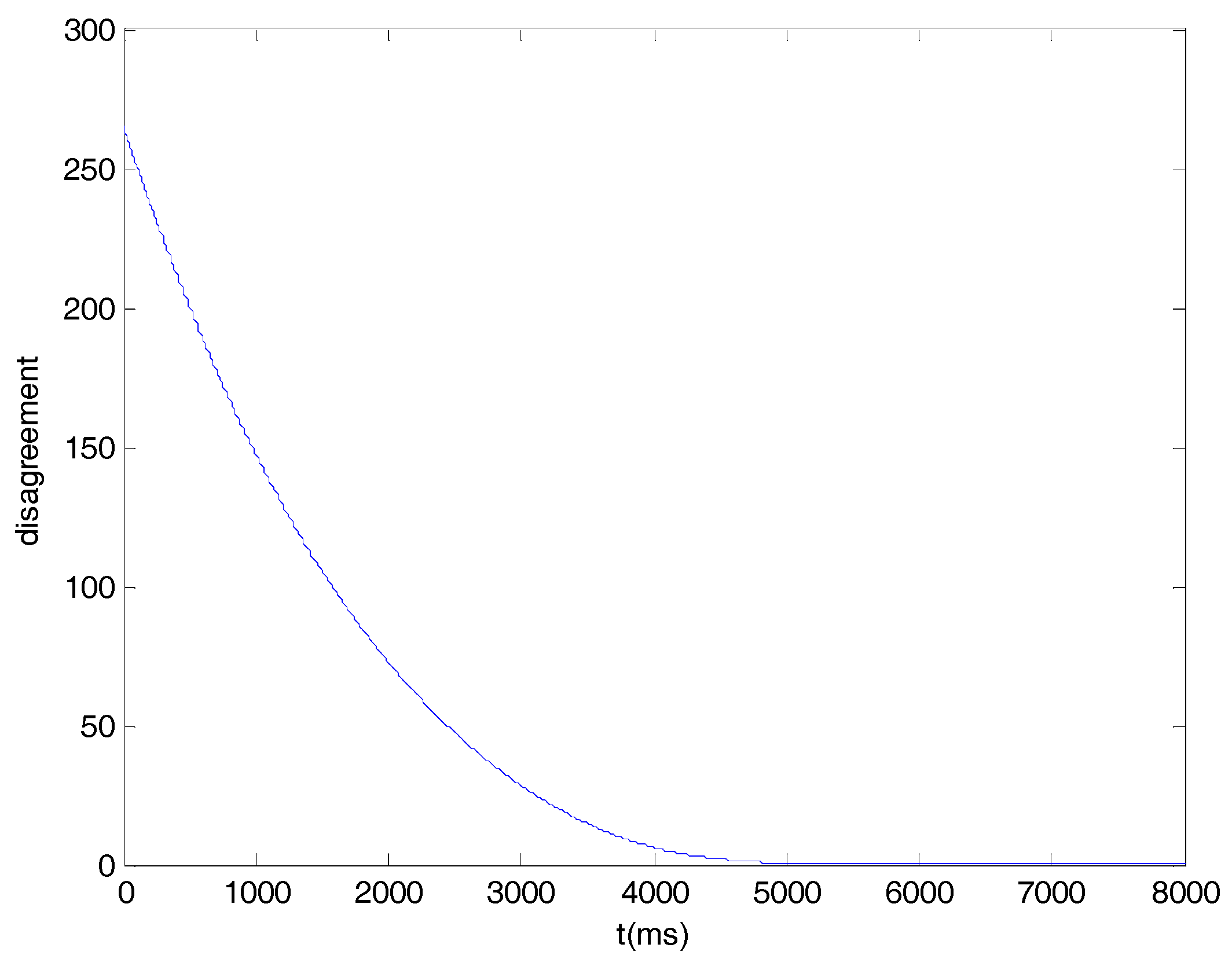
5.3. Simulation Results of Consensus Algorithm with Input Constraints in TSP
5.4. Simulation Results of Probability of Traffic Accidents at Intersections
6. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
References
- ITS America. Transit Signal Priority (TSP): A Planning and Implementation Handbook; United States Department of Transportation: Washington, DC, USA, 2005.
- Bertini, R.L.; Glasgow, C.; Peters, J. An Overview of Transit Signal Priority; ITS America: Washington, DC, USA, 2004. [Google Scholar]
- Transit Cooperative Research Program. Improved Traffic Light Signal Priority for Transit; TCRP Project A-16; Transportation Research Board, National Research Council: Washington, DC, USA, 1998. [Google Scholar]
- Sunkari, S.R.; Beasley, P.S.; Urbanik, T., II; Fambro, D.B. Model to evaluate the impacts of bus priority on signalized intersections. Transp. Res. Rec. 1995, 117–123. [Google Scholar]
- Daniel, J.; Lieberman, E.; Srinivasan, R. Assess Impacts and Benefits of Traffic Light Signal Priority for Busses; FHWA-NJ-2004-013; FHWA: Washington, DC, USA, 2004.
- Gang-Len, C.; Vasudevan, M.; Chih-Chiang, S.U. Bus-Preemption under Adaptive Signal Control Environments. Transp. Res. Board 1995, 146–154. Available online: https://www.researchgate.net/publication/288884528_Bus-preemption_under_adaptive_signal_control_environments (accessed on 23 October 2017).
- Yagar, S. Efficient Transit Priority at Intersections. Transp. Res. Rec. 1993, 10–15. Available online: http://onlinepubs.trb.org/Onlinepubs/trr/1993/1390/1390-002.pdf (accessed on 23 October 2017).
- Skabardonis, A. Control Strategies for Transit Priority; TRB, National Research Council: Washington, DC, USA, 2000. [Google Scholar]
- Rakha, H.; Zhang, Y. Sensitivity Analysis of Transit Signal Priority Impacts on Operation of a Signalized Intersection. J. Transp. Eng. 2004, 130, 796–804. [Google Scholar] [CrossRef]
- Roark, J.J. Synthesis of Transit Practice-Enforcement of Priority Treatment for Buses on Urban Streets; National Cooperative Transit Research & Development Program, TRB, National Research Council: Washington, DC, USA, 1982. [Google Scholar]
- Baker, R.J.; Collura, J.; Dale, J.J.; Head, L.; Hemily, B.; Ivanovic, M.; Jarzab, J.T.; McCormick, D.; Obenberger, J.; Smith, L.; et al. An Overview of Transit Signal Priority. Computers 2002. Available online: http://xueshu.baidu.com/s?wd=paperuri:(315181fa6b80d25347091b16c6441f26)&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http://trid.trb.org/view/723986&ie=utf-8&sc_us=13110307943409424370 (accessed on 23 October 2017).
- Heydecker, B.G. Capacity at a Signal-controlled Junction Where There Is Priority for Buses. Transp. Res. 1983, 17, 341–357. [Google Scholar] [CrossRef]
- Lee, J.; Shalaby, A.; Greenough, J.; Bowie, M.; Hung, S. Advanced Transit Signal Priority Control with Online Microsimulation-Based Transit Prediction Model. Transp. Res. Rec. J. Transp. Res. Board 2005, 1925, 185–194. [Google Scholar] [CrossRef]
- Yagar, S.; Han, B. A Procedure for Real-Time Signal Control that Considers. Transit Interference. Transp. Res. 1994, 28, 315–331. [Google Scholar]
- Ma, W.; Yang, X. Study on priority control strategy of bus signal. J. Urban Transp. 2010, 8, 70–78. [Google Scholar]
- Jenelius, E.; Mattsson, L.G. Road network vulnerability analysis of area-covering disruptions: A grid-based approach with case study. Transp. Res. Part A 2012, 46, 746–760. [Google Scholar] [CrossRef]
- Savkin, A.V. Coordinated collective motion of groups of autonomous mobile robots: Analysis of Vicsek’s model. IEEE Trans. Autom. Control 2004, 49, 981–982. [Google Scholar] [CrossRef]
- Gazi, V.; Passino, K.M. Stability analysis ofswarms. IEEE Trans. Autom. Control 2003, 48, 692–697. [Google Scholar] [CrossRef]
- Liu, Y.; Passino, K.M.; Polycarpou, M.M. Stability analysis of M-dimensional asynchronous swarms with a fixed communication topology. IEEE Trans. Autom. Control 2003, 48, 76–95. [Google Scholar]
- Vicsek, T.; Cziroo’k, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-deriven particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar] [CrossRef] [PubMed]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, L520–L533. [Google Scholar] [CrossRef]
- FaxJ, A. Optimal and Cooperative Control of Vehicle Formations. Ph.D. Thesis, Control Dynamical System, California Institute of Technology, Pasadena, CA, USA, 2001. [Google Scholar]
- FaxJ, A.; Murray, R.M. Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Control 2004, 49, 1465–1476. [Google Scholar]
- Wen, Y. Study on Consistency of Multi-Agent System. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2009. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and Cooperation in Networked Multi-Agent Systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef]
- Saber, R.O.; Murray, R.M. Agreement problems in networks with directed graphs and switching topology. In Proceedings of the IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; Volume 4, pp. 4126–4132. [Google Scholar]
- Gallager, R.G.; Humblet, P.A.; Spira, P.M. A Distributed Algorithm for Minimum-Weight Spanning Trees; ACM: New York, NY, USA, 1983. [Google Scholar]
- Lei, B. Research on Cooperative Control Problem of Swarm Robots System. Ph.D. Thesis, Wuhan University of Technology, Wuhan, China, 2009. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategy | Main Methods |
|---|---|
| Passive priority strategy | Adjustment of cycle length |
| Transit movement repetition in the cycle | |
| Green time bias towards transit movement | |
| Phasing design bias towards transit movement | |
| Linking for transit progression | |
| Active priority strategy | Phase extension |
| Early phase activation | |
| Special transit phase | |
| Phase suppression | |
| Real-time strategy | Delay optimizing |
| Intersection control | |
| Network control |
| Intersection Number | TSP without Consensus Algorithm | TSP with Consensus Algorithm (3) | TSP with Consensus Algorithm (4) |
|---|---|---|---|
| Intersection 1 | 5 | 3 | 2 |
| Intersection 2 | 3 | 2 | 2 |
| Intersection 3 | 4 | 2 | 1 |
| Intersection 4 | 4 | 3 | 3 |
| Intersection 5 | 3 | 2 | 2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, D.; Li, C.; Wang, Z.; Wang, D.; Xing, J.; Zhang, B. Signal Consensus in TSP of the Same Grid in Road Network. Future Internet 2017, 9, 69. https://doi.org/10.3390/fi9040069
Li D, Li C, Wang Z, Wang D, Xing J, Zhang B. Signal Consensus in TSP of the Same Grid in Road Network. Future Internet. 2017; 9(4):69. https://doi.org/10.3390/fi9040069
Chicago/Turabian StyleLi, Dongyuan, Chengshuai Li, Zidong Wang, Deqiang Wang, Jianping Xing, and Bo Zhang. 2017. "Signal Consensus in TSP of the Same Grid in Road Network" Future Internet 9, no. 4: 69. https://doi.org/10.3390/fi9040069
APA StyleLi, D., Li, C., Wang, Z., Wang, D., Xing, J., & Zhang, B. (2017). Signal Consensus in TSP of the Same Grid in Road Network. Future Internet, 9(4), 69. https://doi.org/10.3390/fi9040069