
A Novel Double-Sided Offset Stator Axial-Flux Permanent Magnet Motor for Electric Vehicles

 , , , and
, , , and
Abstract
:1. Introduction
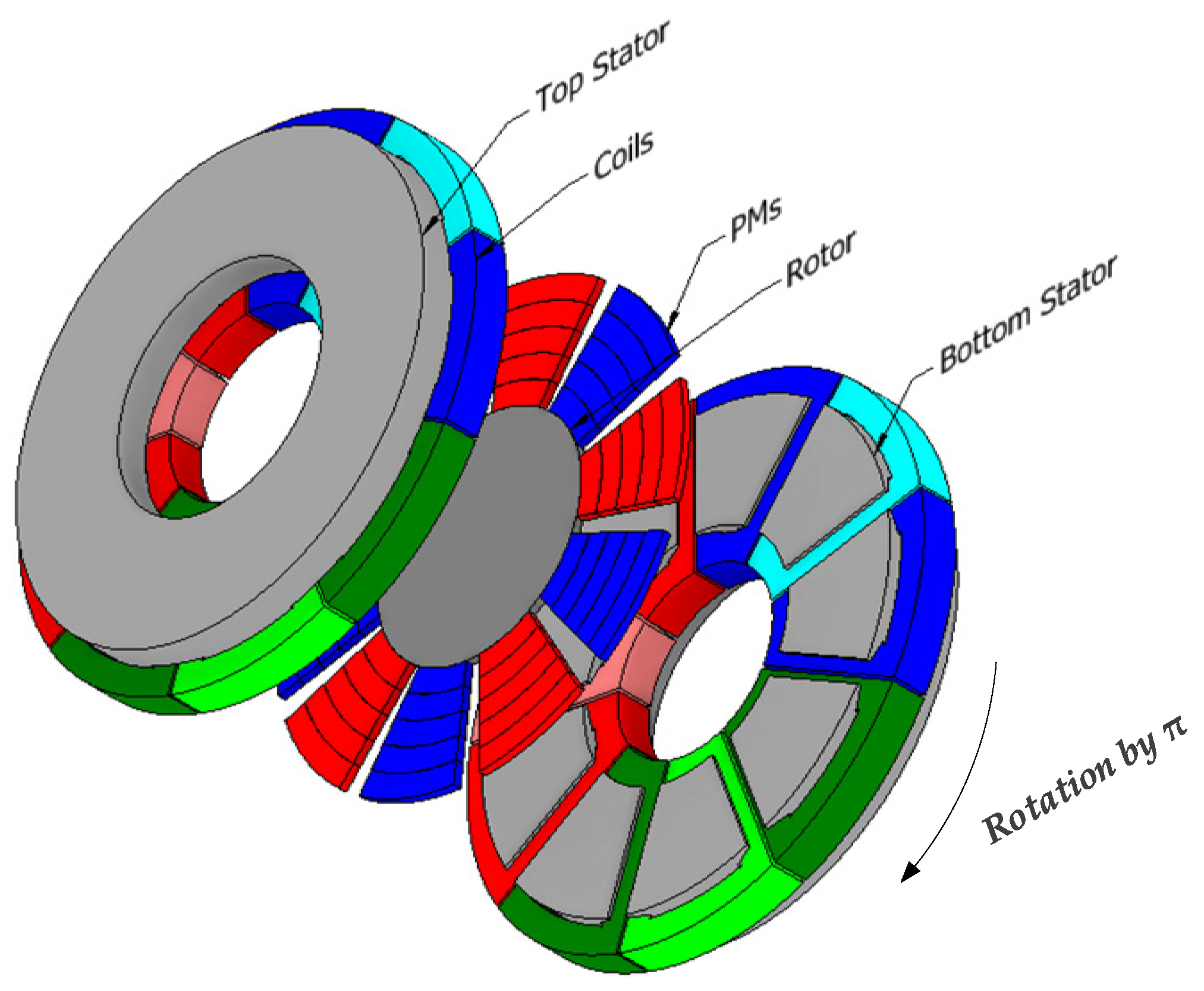
2. Double-Sided Offset Stator AFPM Motor
2.1. Motor Topology
2.2. Analytical Analysis
2.2.1. Three-Phase 9-Slot Winding Distribution
2.2.2. DOSSR AFPM Motor
3. 3D Simulation and Result Discussion
3.1. 3D Simulation Model
3.2. Base Speed Simulation
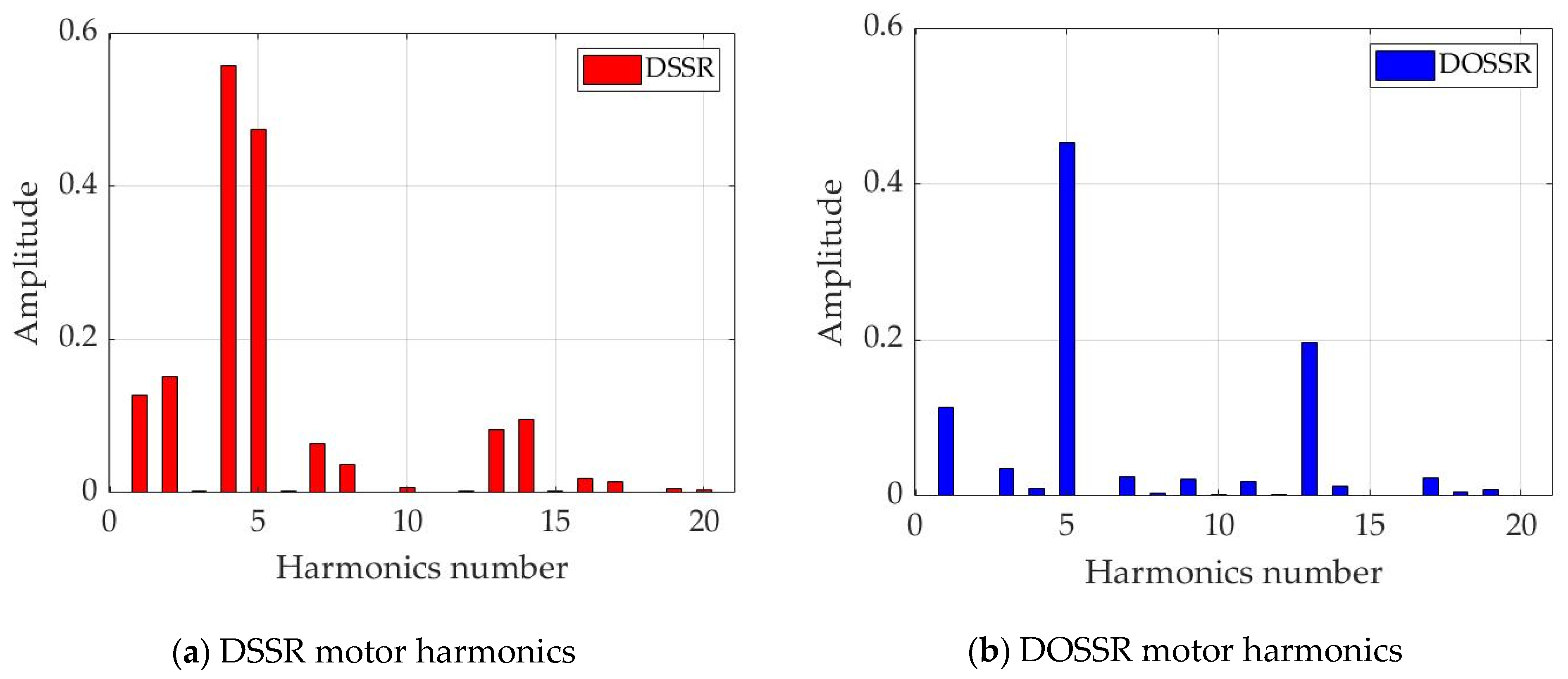
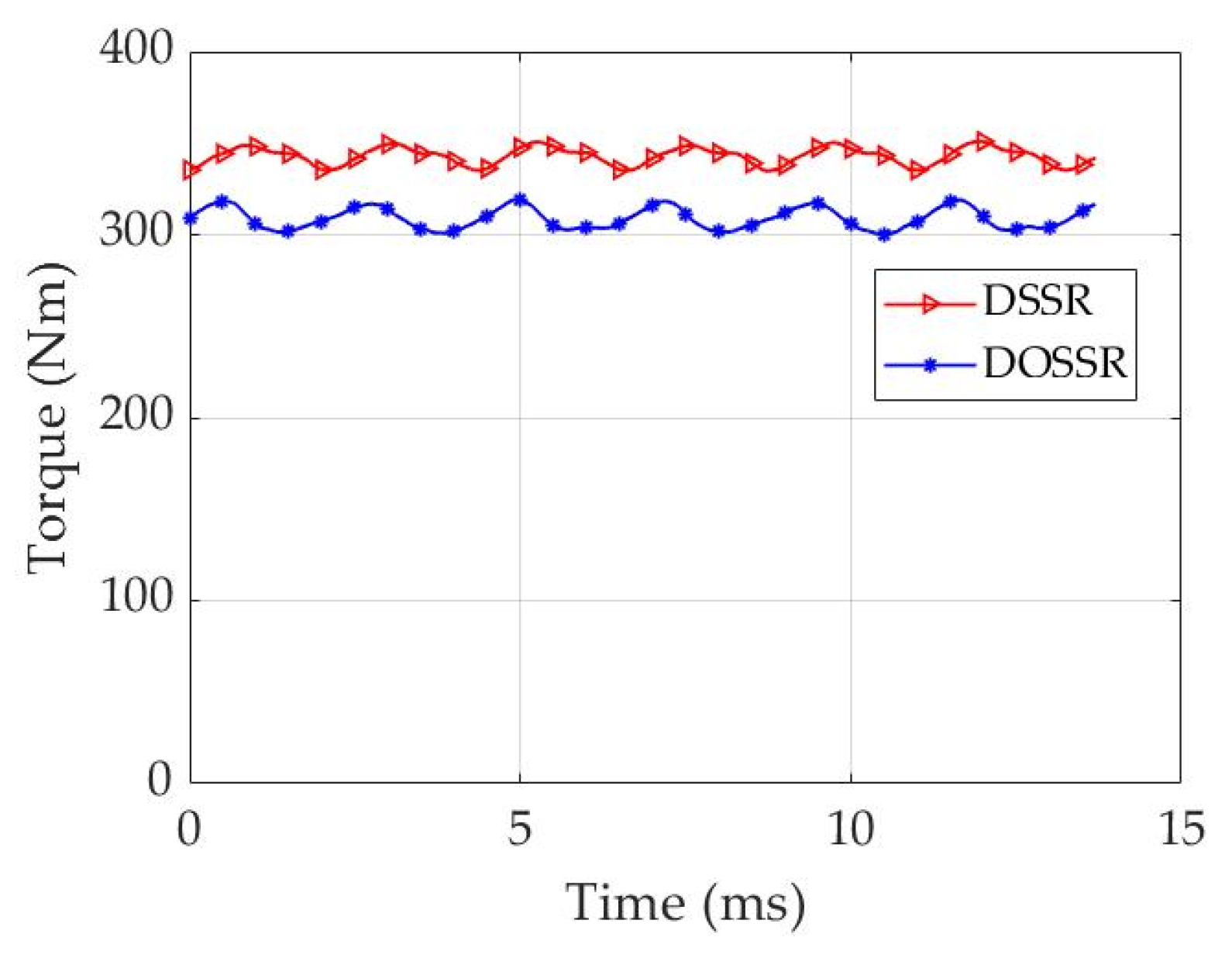
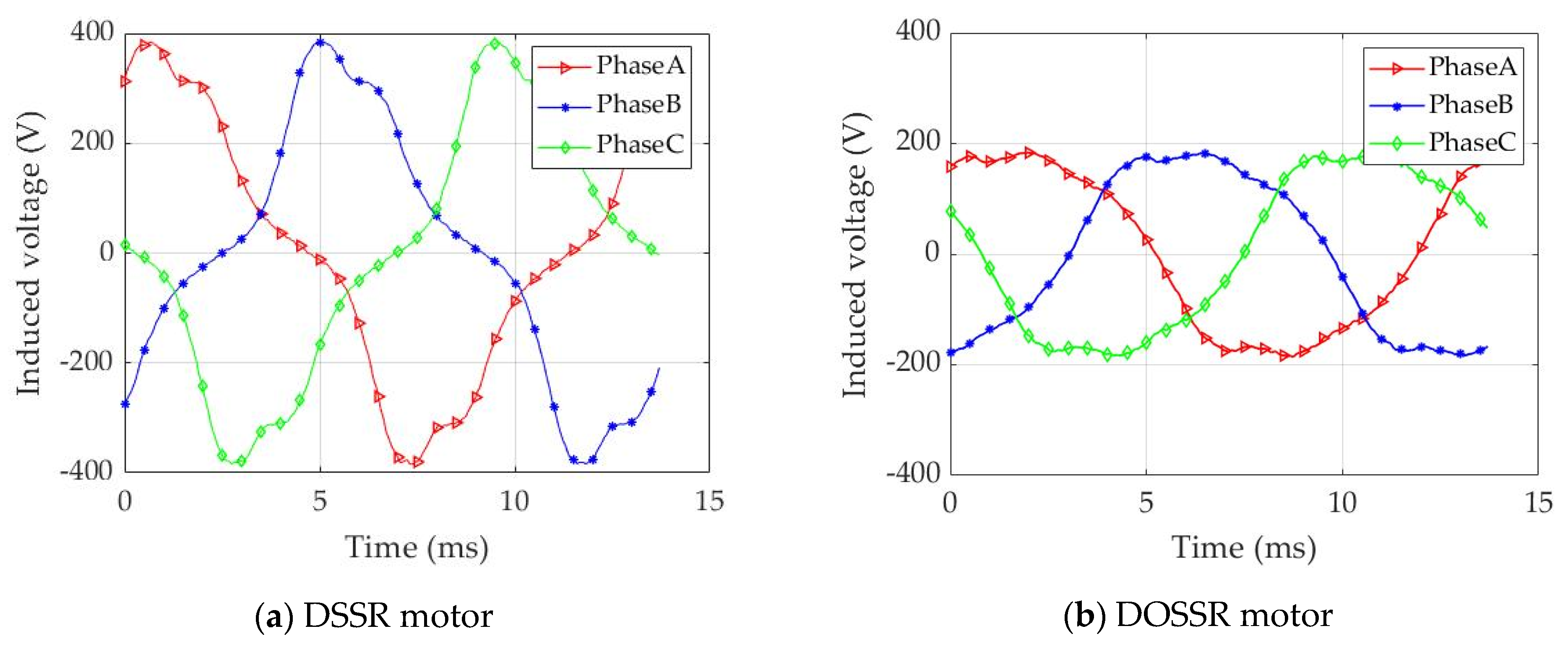
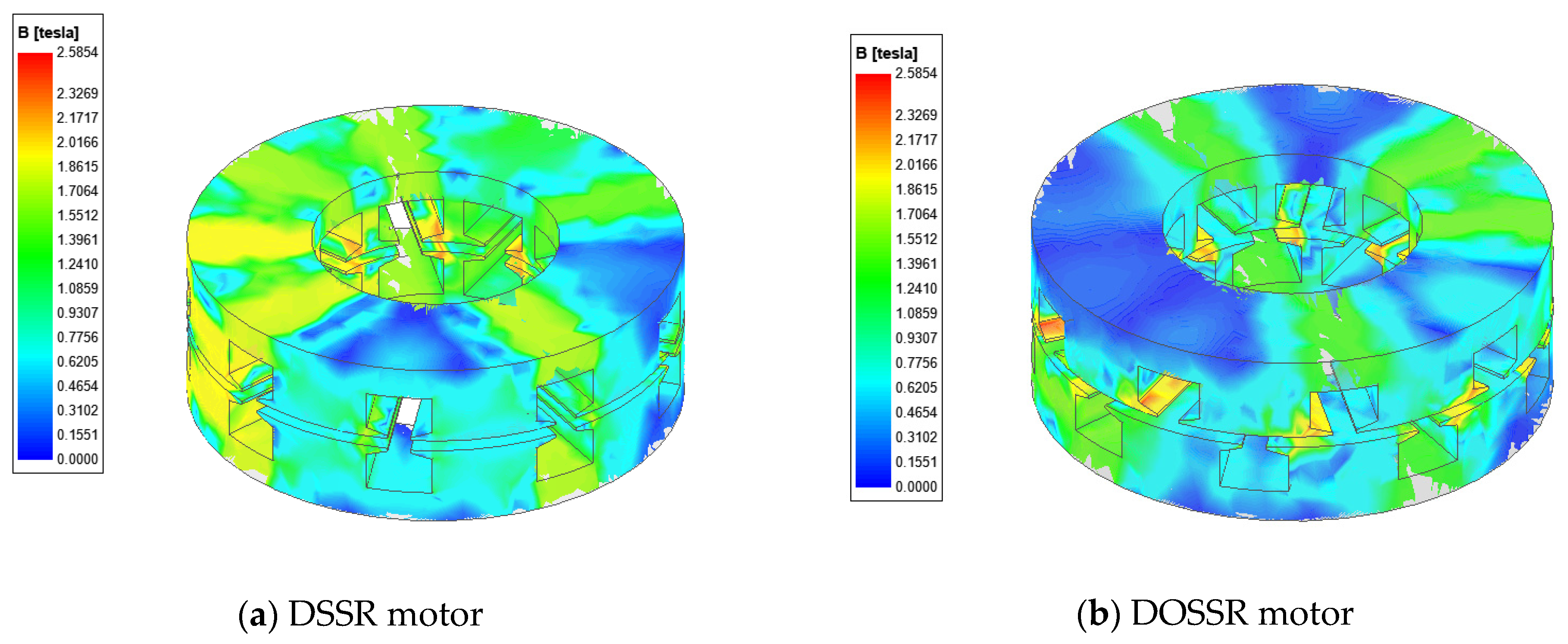
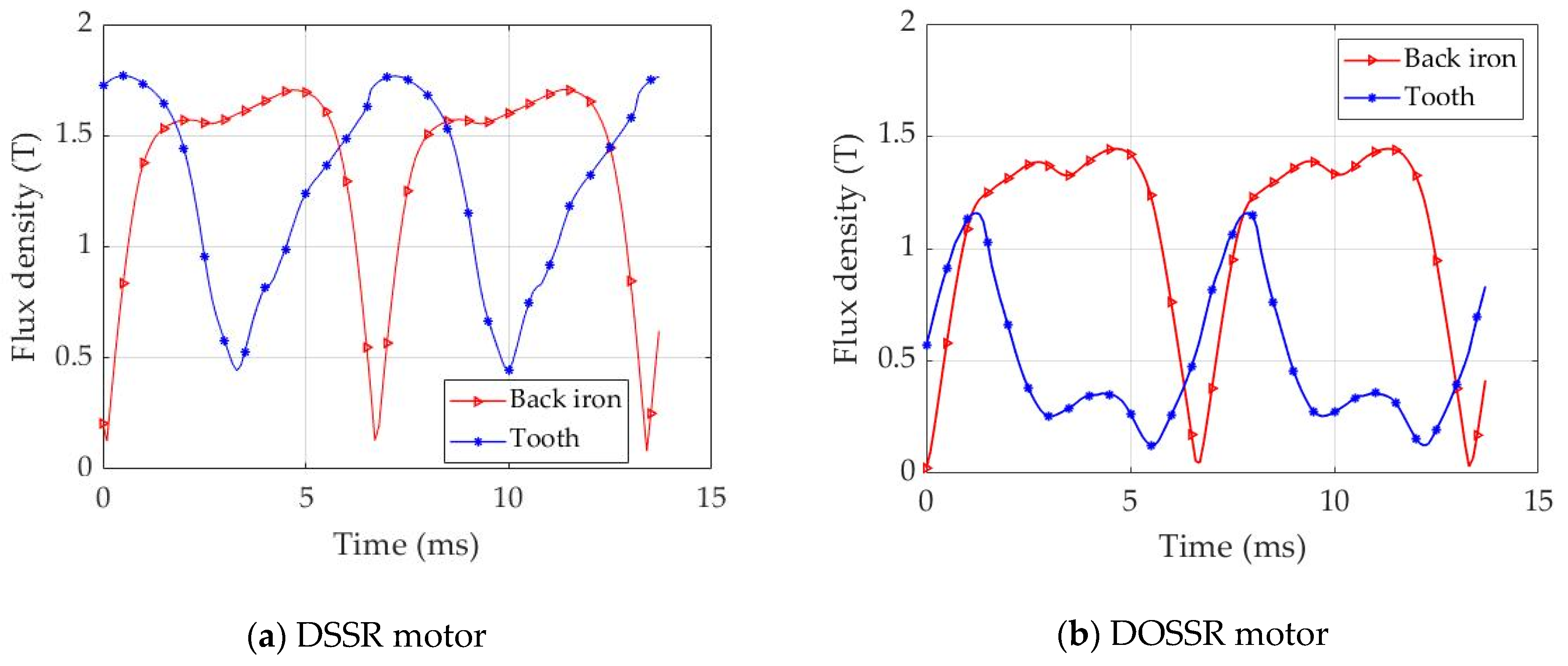
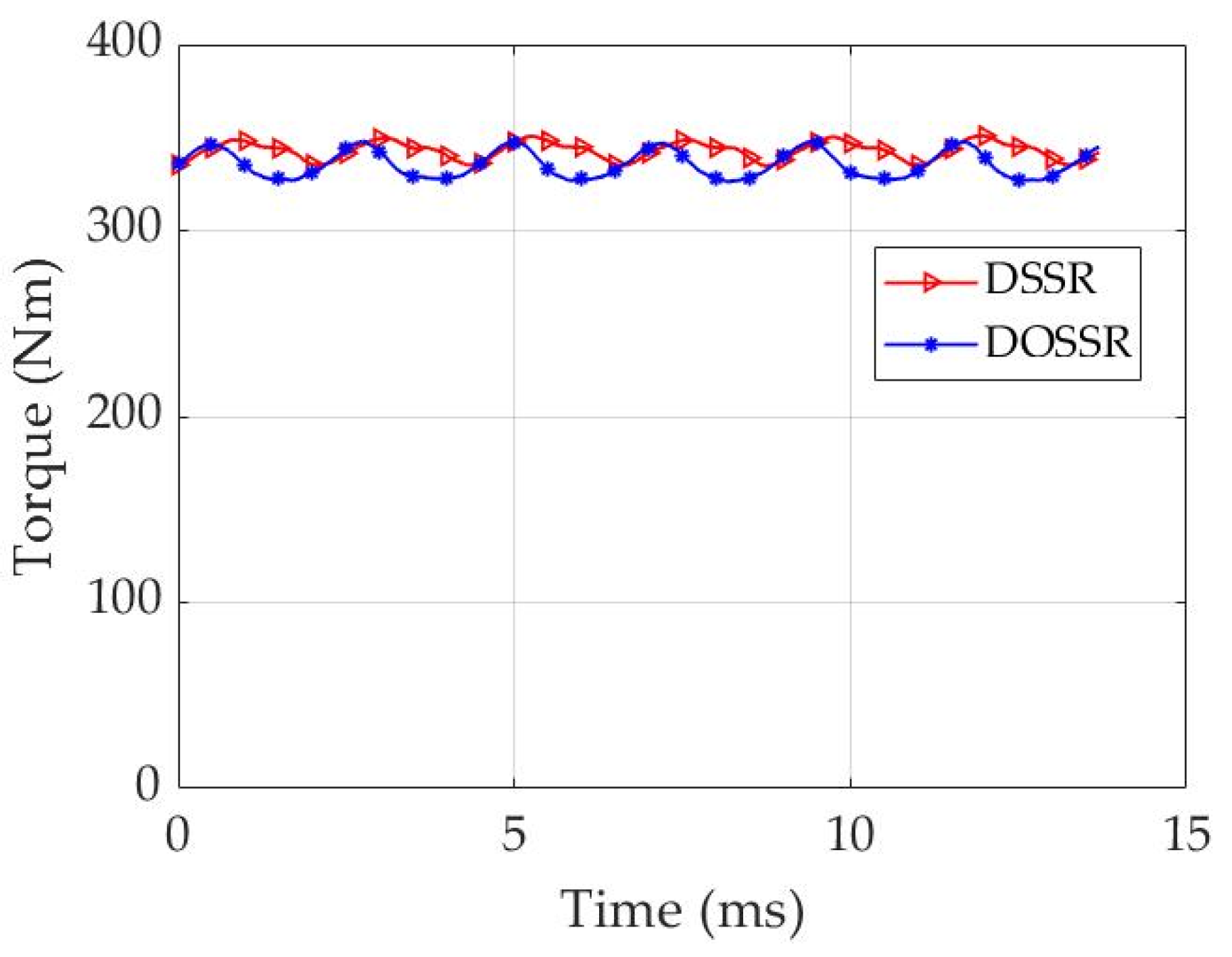
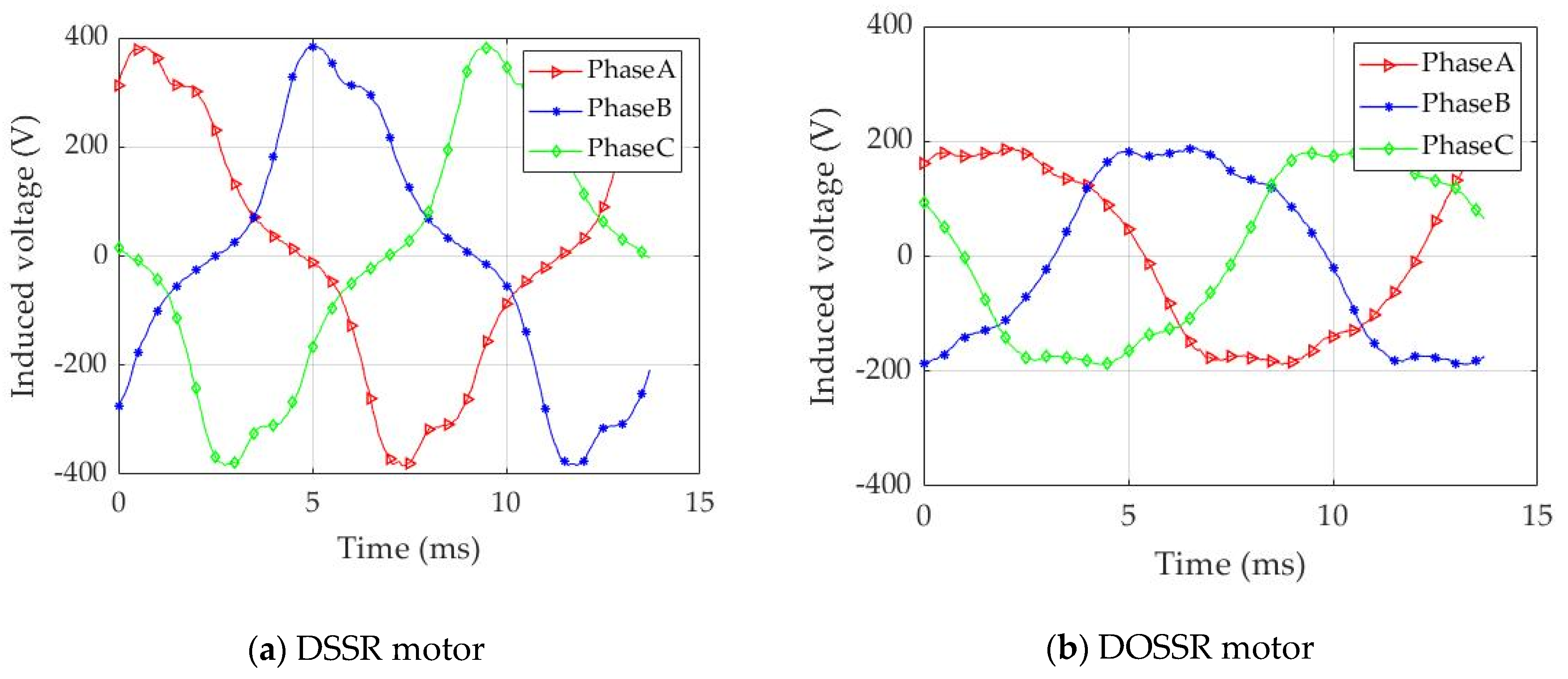
3.2.1. Comparison of the DSSR and the DOSSR Motor with Same Dimensions
3.2.2. DOSSR Motor Redesign
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mahmoudi, A.; Kahourzade, S.; Rahim, N.A.; Ping, H.W.; Uddin, M.N. Design and prototyping of an optimised axial-flux permanent-magnet synchronous machine. IET Electr. Power Appl. 2013, 7, 338–349. [Google Scholar] [CrossRef]
- Chan, C. Axial-field electrical machines-design and applications. IEEE Trans. Energy Convers. 1987, EC-2, 294–300. [Google Scholar] [CrossRef]
- Taran, N.; Klink, D.; Heins, G.; Rallabandi, V.; Patterson, D.; Ionel, D.M. A Comparative study of yokeless and segmented armature versus single sided axial flux pm machine topologies for electric traction. IEEE Trans. Ind. Appl. 2022, 58, 325–335. [Google Scholar] [CrossRef]
- Lombard, N.; Kamper, M. Analysis and performance of an ironless stator axial flux PM machine. IEEE Trans. Energy Convers. 1999, 14, 1051–1056. [Google Scholar] [CrossRef]
- Aydin, M.; Huang, S.; Lipo, T.A. Axial flux permanent magnet disc machines: A review. Conf. Rec. SPEEDAM 2004, 8, 61–71. [Google Scholar]
- Eastham, J.; Profumo, F.; Tenconi, A.; Hill-Cottingham, R.; Coles, P.; Gianolio, G. Novel axial flux machine for aircraft drive: Design and modeling. IEEE Trans. Magn. 2002, 38, 3003–3005. [Google Scholar] [CrossRef]
- Kowal, D.; Sergeant, P.; Dupre, L.; Bossche, A.V.D. Comparison of nonoriented and grain-oriented material in an axial flux permanent-magnet machine. IEEE Trans. Magn. 2010, 46, 279–285. [Google Scholar] [CrossRef]
- Rahman, K.M.; Patel, N.J.; Ward, T.; Nagashima, J.; Caricchi, F.; Crescimbini, F. Application of direct-drive wheel motor for fuel cell electric and hybrid electric vehicle propulsion system. IEEE Trans. Ind. Appl. 2006, 42, 1185–1192. [Google Scholar] [CrossRef]
- Marignetti, F.; Colli, V.D.; Carbone, S. Comparison of axial flux pm synchronous machines with different rotor back cores. IEEE Trans. Magn. 2010, 46, 598–601. [Google Scholar] [CrossRef]
- Li, T.; Zhang, Y.; Liang, Y.; Yang, Y.; Jiao, J. Magnet eddy-current losses reduction of an axial-flux in-wheel motor with amorphous magnet metal. Int. J. Appl. Electromagn. Mech. 2021, 65, 431–450. [Google Scholar] [CrossRef]
- Eastham, J.F.; Cox, T.; Lai, H.C.; Proverbs, J. The use of concentrated windings for offset double stator linear induction motors. Electromotion 2008, 2, 51–56. [Google Scholar]
- Eastham, F. Transient analysis of offset stator double sided short rotor linear induction motor accelerator. In Proceedings of the 20th International Conference on Magnetically Levitated Systems and Linear Drives (MAGLEV 2008), San Diego, CA, USA, 15–18 December 2008. [Google Scholar]
- Eastham, J.; Cox, T.; Proverbs, J. Application of planar modular windings to linear induction motors by harmonic cancellation. IET Electr. Power Appl. 2010, 4, 140–148. [Google Scholar] [CrossRef]
- Kremer, M. Electromagnetic Design of a Disc Rotor Electric Machine As Integrated Motor-Generator for Hybrid Vehicles. Ph.D. Thesis, Université de Haute Alsace-Mulhouse, Mulhouse, France, 2016. [Google Scholar]
- Di Gerlando, A.; Foglia, G.M.; Iacchetti, M.F.; Perini, R. Axial flux PM machines with concentrated armature windings: Design analysis and test validation of wind energy generators. IEEE Trans. Ind. Electron. 2011, 58, 3795–3805. [Google Scholar] [CrossRef]
- Gair, S.; Canova, A.; Eastham, J.; Betzer, T. A new 2D FEM analysis of a disc machine with offset rotor. In Proceedings of the International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth, New Delhi, India, 8–11 January 1996; Volume 1, pp. 617–621. [Google Scholar]
- Di Gerlando, A.; Foglia, G.; Ricca, C. Analytical design of a high torque density In-Wheel YASA AFPM motor. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; Volume 1, pp. 402–408. [Google Scholar]
- YASA P400|Compact Electric Vehicle Motor|YASA Ltd. Available online: https://www.yasa.com/products/yasa-p400/ (accessed on 8 March 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coil Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Coil phase | a | −a | a | b | −b | b | c | −c | c |
| Pole Pairs | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PPS | 0.061 | 0 | 0 | 0.945 | 0 | 0 | 0.139 | 0 | 0 | 0.061 | 0 | 0 |
| NPS | 0 | 0.139 | 0 | 0 | 0.945 | 0 | 0 | 0.061 | 0 | 0 | 0.139 | 0 |
| Pole Pairs | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PPS | 0.061 | 0 | 0 | 0 | 0 | 0 | 0.139 | 0 | 0 | 0 | 0 | 0 |
| NPS | 0 | 0 | 0 | 0 | 0.945 | 0 | 0 | 0 | 0 | 0 | 0.139 | 0 |
| Parameter | Value |
|---|---|
| Pole-pair number | 5 |
| Stator outer diameter | 300 mm |
| Stator inner diameter | 150 mm |
| Motor axial length | 87 mm |
| Back iron thickness | 20 mm |
| Tooth height | 23 mm |
| Tooth head height | 7 mm |
| Slot number | 9 |
| Slot width | 40 mm |
| Rotor outer diameter | 300 mm |
| Rotor core diameter | 150 mm |
| Air gap | 1.25 mm |
| Permanent magnet thickness | 4.5 mm |
| Permanent magnet angle | 28.8° |
| Item | DSSR | DOSSR | DOSSR Redesign |
|---|---|---|---|
| Torque (Nm) | 343.0 | 308.7 | 335.0 |
| Power rating (kW) | 32.3 | 29.1 | 31.57 |
| Core loss (W) | 213.1 | 138.1 | 148.5 |
| PM loss (W) | 252.1 | 102.7 | 119.2 |
| Copper loss (W) | 917.9 | 917.7 | 917.7 |
| Efficiency (%) | 95.4 | 96.0 | 96.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Pei, X.; Yin, B.; Eastham, J.F.; Vagg, C.; Zeng, X. A Novel Double-Sided Offset Stator Axial-Flux Permanent Magnet Motor for Electric Vehicles. World Electr. Veh. J. 2022, 13, 52. https://doi.org/10.3390/wevj13030052
Wang H, Pei X, Yin B, Eastham JF, Vagg C, Zeng X. A Novel Double-Sided Offset Stator Axial-Flux Permanent Magnet Motor for Electric Vehicles. World Electric Vehicle Journal. 2022; 13(3):52. https://doi.org/10.3390/wevj13030052
Chicago/Turabian StyleWang, Han, Xiaoze Pei, Boyuan Yin, John Frederick Eastham, Christopher Vagg, and Xianwu Zeng. 2022. "A Novel Double-Sided Offset Stator Axial-Flux Permanent Magnet Motor for Electric Vehicles" World Electric Vehicle Journal 13, no. 3: 52. https://doi.org/10.3390/wevj13030052