
Synergy of Unidirectional and Bidirectional Smart Charging of Electric Vehicles for Frequency Containment Reserve Power Provision



{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
- We investigate how unidirectional and bidirectional smart charging can contribute to FCR power provision.
- We are the first to propose and analyze the advantages of a synergistic operation with uni- and bidirectional charging for FCR power provision
- We present a comprehensive and flexible simulation framework.
- We conduct several sensitivity analyses.
3. Methodology
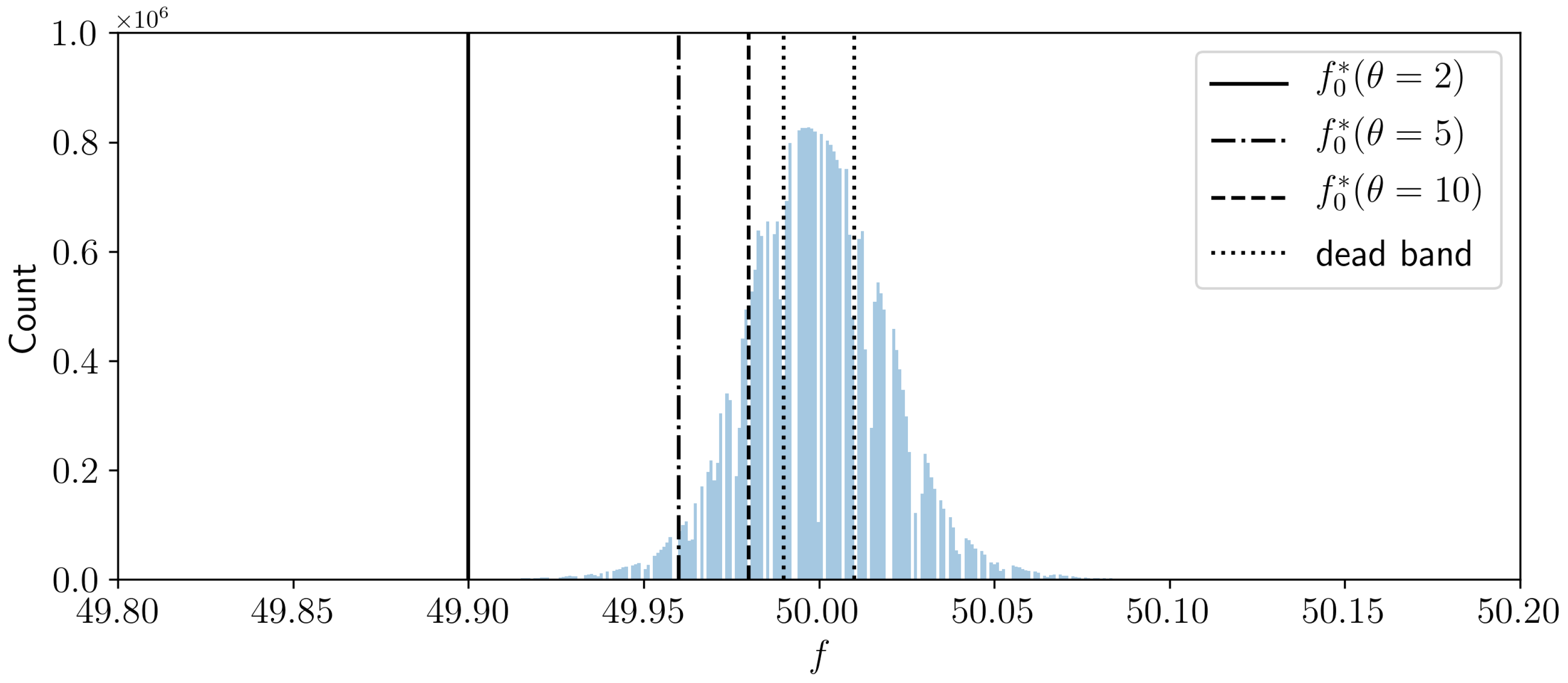
3.1. Frequency Containment Reserve Power
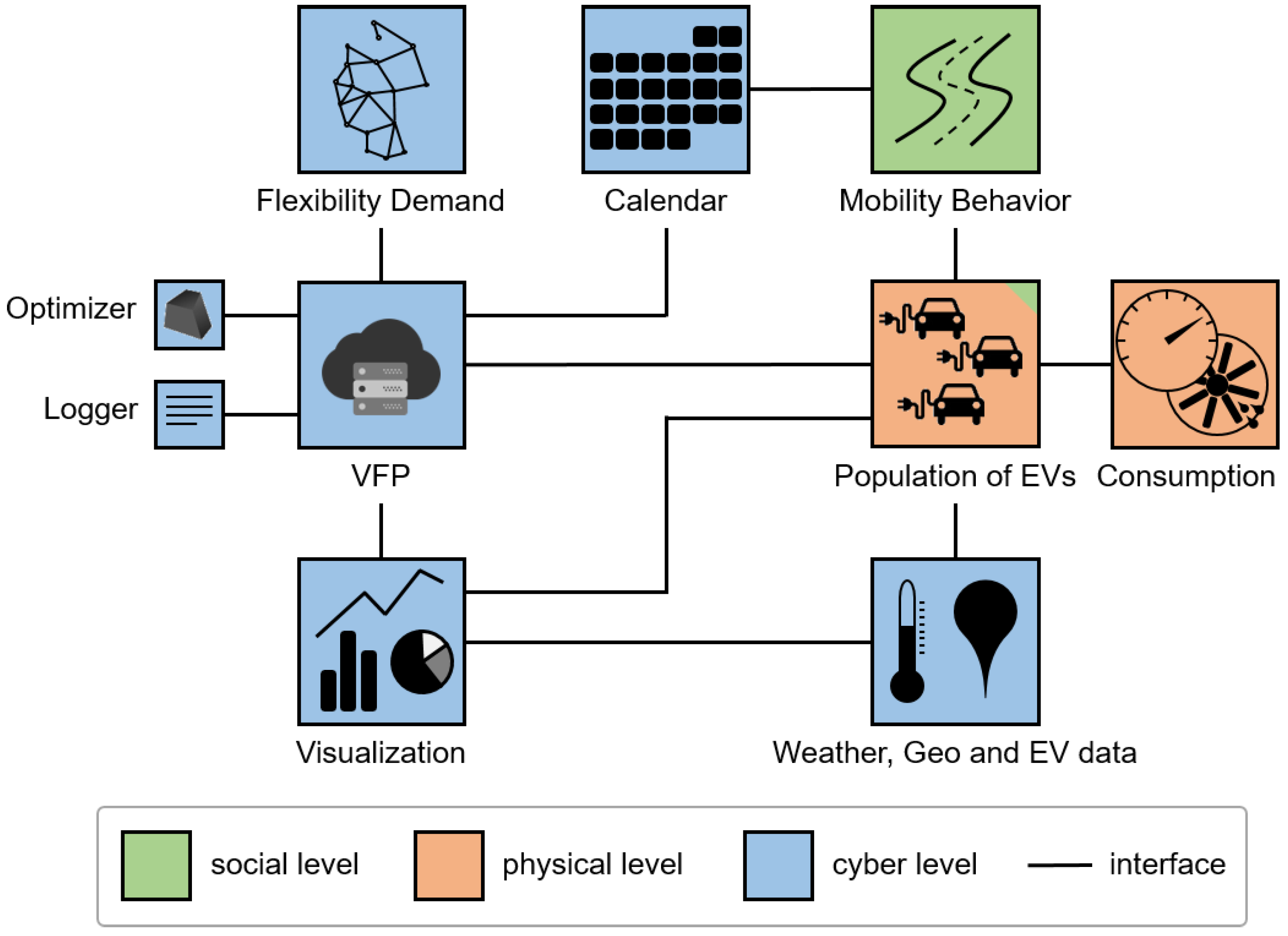
3.2. Simulation Model
4. Results
4.1. Unidirectional Charging
4.2. Uni- and Bidirectional Charging
4.3. Economical Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EPS | electrical power system |
| EV | electric vehicle |
| EVSE | electric vehicle supply equipment |
| FCR | frequency containment reserve |
| G2V | grid-to-vehicle |
| HVAC | heating, ventilation, air conditioning |
| ICT | information and communication technology |
| RES | renewable energy sources |
| TSO | transmission system operator |
| V2G | vehicle-to-grid |
| VFP | virtual flexibility plant |
| VPP | virtual power plant |
References
- Flammini, M.G.; Prettico, G.; Julea, A.; Fulli, G.; Mazza, A.; Chicco, G. Statistical characterisation of the real transaction data gathered from electric vehicle charging stations. Electr. Power Syst. Res. 2019, 166, 136–150. [Google Scholar] [CrossRef]
- International Energy Agency. Global EV Outlook 2019—Scaling-Up the Transition to Electric Mobility; International Energy Agency: Paris, France, 2019. [Google Scholar]
- Ebner, M.; Fattler, S.; Ganz, K. Kurzstudie Elektromobilität. (Short Study Electric Mobility); Forschungsstelle für Energiewirtschaft e.V.: Munich, Germany, 2019. [Google Scholar]
- Mu, Y.; Wu, J.; Jenkins, N.; Jia, H.; Wang, C. A Spatial Temporal model for grid impact analysis of plug-in electric vehicles. Appl. Energy 2014, 114, 456–465. [Google Scholar] [CrossRef]
- Lehmann, N.; Kraft, E.; Duepmeier, C.; Mauser, I.; Förderer, K.; Sauer, D. Definition von Flexibilität in einem zellulär geprägten Energiesystem (Definition of Flexibility in a Cellular Energy System). In Proceedings of the Zukünftige Stromnetze 2019, Berlin, Germany, 30–31 January 2019; Conexio: Pforzheim, Germany, 2019; pp. 459–469. [Google Scholar]
- Gottwalt, S.; Gärttner, J.; Schmeck, H.; Weinhardt, C. Modeling and Valuation of Residential Demand Flexibility for Renewable Energy Integration. IEEE Trans. Smart Grid 2017, 8, 2565–2574. [Google Scholar] [CrossRef]
- Develder, C.; Sadeghianpourhamami, N.; Strobbe, M.; Refa, N. Quantifying flexibility in EV charging as DR potential: Analysis of two real-world data sets. In Proceedings of the 2016 IEEE International Conference on Smart Grid Communications (SmartGridComm), Sydney, Australia, 6–9 November 2016; pp. 600–605. [Google Scholar] [CrossRef]
- Sadeghianpourhamami, N.; Refa, N.; Strobbe, M.; Develder, C. Quantitive analysis of electric vehicle flexibility: A data-driven approach. Int. J. Electr. Power Energy Syst. 2018, 95, 451–462. [Google Scholar] [CrossRef]
- Strobel, L.; Schlund, J.; Pruckner, M. Joint analysis of regional and national power system impacts of electric vehicles—A case study for Germany on the county level in 2030. Appl. Energy 2022, 315, 118945. [Google Scholar] [CrossRef]
- Englberger, S.; Hesse, H.; Hanselmann, N.; Jossen, A. SimSES Multi-Use: A simulation tool for multiple storage system applications. In Proceedings of the 2019 16th International Conference on the European Energy Market (EEM), Ljubljana, Slovenia, 18–20 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Infas; DLR; IVT; Infas 360. Mobilität in Deutschland 2017 (Mobility in Germany 2017); Bundesministerium für Verkehr und digitale Infrastruktur: Bonn, Germany, 2018.
- Schlund, J. Electric Vehicle Charging Flexibility for Ancillary Services in the German Electrical Power System. Ph.D. Thesis, Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU), Erlangen, Germany, 2021. [Google Scholar]
- Thingvad, A. The Role of Electric Vehicles in Global Power Systems. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2021. [Google Scholar]
- Englberger, S.; Abo Gamra, K.; Tepe, B.; Schreiber, M.; Jossen, A.; Hesse, H. Electric vehicle multi-use: Optimizing multiple value streams using mobile storage systems in a vehicle-to-grid context. Appl. Energy 2021, 304, 117862. [Google Scholar] [CrossRef]
- Tsagkaroulis, P.; Thingvad, A.; Marinelli, M.; Suzuki, K. Optimal Scheduling of Electric Vehicles for Ancillary Service Provision with Real Driving Data. In Proceedings of the 2021 56th International Universities Power Engineering Conference (UPEC), Middlesbrough, UK, 31 August–3 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Moncecchi, M.; Rancilio, G.; Dimovski, A.; Bovera, F. Smart Charging Algorithm for Flexibility Provision with Electric Vehicle Fleets. In Proceedings of the 2021 IEEE 15th International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Florence, Italy, 14–16 July 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Meesenburg, W.; Thingvad, A.; Elmegaard, B.; Marinelli, M. Combined provision of primary frequency regulation from Vehicle-to-Grid (V2G) capable electric vehicles and community-scale heat pump. Sustain. Energy Grids Netw. 2020, 23, 100382. [Google Scholar] [CrossRef]
- Schlund, J.; Pruckner, M.; German, R. FlexAbility—Modeling and Maximizing the Bidirectional Flexibility Availability of Unidirectional Charging of Large Pools of Electric Vehicles. In Proceedings of the Eleventh ACM International Conference on Future Energy Systems: e-Energy’20, Virtual Event, Australia, 22–26 June 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 121–132. [Google Scholar] [CrossRef]
- Neupane, B.; Siksnys, L.; Pedersen, T.B.; Hagensby, R.; Aftab, M.; Eck, B.; Fusco, F.; Gormally, R.; Purcell, M.; Tirupathi, S.; et al. GOFLEX: Extracting, Aggregating and Trading Flexibility Based on FlexOffers for 500+ Prosumers in 3 European Cities [Operational Systems Paper]. In Proceedings of the Thirteenth ACM International Conference on Future Energy Systems: e-Energy’22, Online, 28 June–1 July 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 361–373. [Google Scholar]
- Lilliu, F.; Pedersen, T.B.; Šikšnys, L.; Neupane, B. Uncertain Flexoffers, a Scalable, Uncertainty-Aware Model for Energy Flexibility: e-Energy’22, Online, 28 June–1 July 2022; Association for Computing Machinery: New York, NY, USA, 2022; pp. 448–449. [Google Scholar]
- Hussain, S.; Thakur, S.; Shukla, S.; Breslin, J.G.; Jan, Q.; Khan, F.; Kim, Y.S. A two-layer decentralized charging approach for residential electric vehicles based on fuzzy data fusion. J. King Saud Univ.-Comput. Inf. Sci. 2022, in press. [Google Scholar] [CrossRef]
- Spitzer, M.; Schlund, J.; Apostolaki-Iosifidou, E.; Pruckner, M. Optimized Integration of Electric Vehicles in Low Voltage Distribution Grids. Energies 2019, 12, 4059. [Google Scholar] [CrossRef]
- Tuchnitz, F.; Ebell, N.; Schlund, J.; Pruckner, M. Development and evaluation of a smart charging strategy for an electric vehicle fleet based on reinforcement learning. Appl. Energy 2021, 285, 116382. [Google Scholar] [CrossRef]
- German Transmission System Operators. General Information on Control Reserve—Technical Aspects. Available online: https://www.regelleistung.net/ext/static/technical?lang=en (accessed on 20 October 2020).
- Bundesnetzagentur (German Federal Network Agency). Monitoringbericht 2019 (Monitoring Report 2019); German Federal Network Agency: Bonn, Germany, 2020.
- Biernacka, I. Transmission System Operations and Control; Lecture; Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU): Erlangen, Germany, 2014. [Google Scholar]
- NEXT Kraftwerke. Was Ist Primärregelleistung (What Is Frequency Containment Reserve Power)? Available online: https://www.next-kraftwerke.de/wissen/primaerreserve-primaerregelleistung (accessed on 20 October 2020).
- Schlund, J.; Steber, D.; Bazan, P.; German, R. Increasing the efficiency of a virtual battery storage providing frequency containment reserve power by applying a clustering algorithm. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Marinelli, M.; Martinenas, S.; Knezovic, K.; Andersen, P.B. Validating a centralized approach to primary frequency control with series-produced electric vehicles. J. Energy Storage 2016, 7, 63–73. [Google Scholar] [CrossRef]
- Borshchev, A.; Brailsford, S.; Churilov, L.; Dangerfield, B. Multi-method modelling: AnyLogic. In Discrete-Event Simulation and System Dynamics for Management Decision Making; Wiley Online Library: Hoboken, NJ, USA, 2014; pp. 248–279. [Google Scholar]
- Krüger, G.; Hansen, H. Java-Programmierung—Das Handbuch zu Java 8; O’Reilly: Heidelberg, Germany, 2014. [Google Scholar]
- Bazan, P.; Luchscheider, P.; German, R. Rapid Modeling and Simulation of Hybrid Energy Networks. In Proceedings of the 2015 SmartER Europe Conference, Essen, Germany, 10–12 February 2015; pp. 47–54. [Google Scholar]
- Bazan, P. Hybrid Simulation of Smart Energy Systems. Ph.D. Thesis, Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU), Erlangen, Germany, 2017. [Google Scholar]
- Schlund, J.; Betzin, C.; Wolfschmidt, H.; Veerashekar, K.; Luther, M. Investigation, modeling and simulation of redox-flow, lithium-ion and lead-acid battery systems for home storage applications. In Proceedings of the 11th International Renewable Energy Storage Conference (IRES 2017), Düsseldorf, Germany, 14–16 March 2017. [Google Scholar]
- Engel, H.; Hensley, R.; Knupfer, S.; Sahdev, S. Charging Ahead: Electric Vehicle Infrastructure Demand; McKinsey Center for Future Mobility: Düsseldorf, Germany, 2018. [Google Scholar]
- Lee, Z.J.; Li, T.; Low, S.H. ACN-Data: Analysis and Applications of an Open EV Charging Dataset. In Proceedings of the Tenth ACM International Conference on Future Energy Systems: e-Energy’19, Phoenix, AZ, USA, 25–28 June 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 139–149. [Google Scholar] [CrossRef]
- Kraftfahrt Bundesamt (German Federal Motor Transport Authority). Bestand nach Zulassungsbezirken (Stock According to Registration Districts). Available online: https://www.kba.de/DE/Statistik/Produktkatalog/produkte/Fahrzeuge/fz1_b_uebersicht.html (accessed on 10 December 2020).
- Kraftfahrt Bundesamt (German Federal Motor Transport Authority). Bestand nach Marken, Hersteller (Stock by Brand, Manufacturer). Available online: https://www.kba.de/DE/Statistik/Fahrzeuge/Bestand/MarkenHersteller/marken_hersteller_node.html (accessed on 10 December 2020).
- Posner, F. Techno-Ökonomische Analyse zur Reduzierung von Engpassmanagement mit Elektrofahrzeugen (Techno-Economical Analysis of Reducing Congestion Management with Electric Vehicles); Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU): Erlangen, Germany, 2020. [Google Scholar]
- Bundesministerium für Verkehr und Digitale Infrastruktur (Federal Ministry of Transport and Digital Infrastructure). Regionalstatistische Raumtypologie—RegioStaR (Regional Statistical Spatial Typology). Available online: https://www.bmvi.de/SharedDocs/DE/Artikel/G/regionalstatistische-raumtypologie.html (accessed on 10 December 2020).
- Gobmaier, T. Netzfrequenzmessung—Messdaten des Jahres 2015 (Power frequency Measurement—Measurement Data of the Year 2015). Available online: https://www.netzfrequenzmessung.de (accessed on 25 January 2021).
- Deloitte. Elektromobilität in Deutschland—Marktentwicklung bis 2030 und Handlungsempfehlungen (Electromobility in Germany—Market Development until 2030 and Recommendations for Action); Deloitte: Munich, Germany, 2020. [Google Scholar]
- German Transmission System Operators. regelleistung.net—Data Center. Available online: https://www.regelleistung.net/apps/datacenter/tenders/ (accessed on 20 January 2021).
- Reuters. German Transport Minister Reverses from 15 mln Electric Vehicles Goal. Available online: https://www.reuters.com/world/europe/german-transport-minister-reverses-15-mln-electric-vehicles-goal-2022-01-17/ (accessed on 12 July 2022).
- German Transmission System Operators. Leistungspreise (Power Prices). Available online: https://www.regelleistung-online.de/prl/leistungspreise/ (accessed on 21 December 2021).
- Schlund, J.; Steinert, R.; Pruckner, M. Coordinating E-Mobility Charging for Frequency Containment Reserve Power Provision. In Proceedings of the Ninth International Conference on Future Energy Systems: e-Energy’18, Karlsruhe, Germany, 12–15 June 2018; ACM: New York, NY, USA, 2018; pp. 556–563. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schlund, J.; German, R.; Pruckner, M. Synergy of Unidirectional and Bidirectional Smart Charging of Electric Vehicles for Frequency Containment Reserve Power Provision. World Electr. Veh. J. 2022, 13, 168. https://doi.org/10.3390/wevj13090168
Schlund J, German R, Pruckner M. Synergy of Unidirectional and Bidirectional Smart Charging of Electric Vehicles for Frequency Containment Reserve Power Provision. World Electric Vehicle Journal. 2022; 13(9):168. https://doi.org/10.3390/wevj13090168
Chicago/Turabian StyleSchlund, Jonas, Reinhard German, and Marco Pruckner. 2022. "Synergy of Unidirectional and Bidirectional Smart Charging of Electric Vehicles for Frequency Containment Reserve Power Provision" World Electric Vehicle Journal 13, no. 9: 168. https://doi.org/10.3390/wevj13090168
APA StyleSchlund, J., German, R., & Pruckner, M. (2022). Synergy of Unidirectional and Bidirectional Smart Charging of Electric Vehicles for Frequency Containment Reserve Power Provision. World Electric Vehicle Journal, 13(9), 168. https://doi.org/10.3390/wevj13090168