Abstract
Autonomous driving is a rising technology expected to revolutionize commuting. Even if the spread of autonomous vehicles is slower than expected some years ago, their progress will not stop and will become a reality shortly. Therefore, we must manage them both technologically and by considering their impact on other aspects such as safety, economy, society, and environment. Of these, trust in these vehicles by society is a crucial element that must be accounted for when designing the interaction between human passengers and autonomous vehicles. Economical and social impacts derived from the diffusion of autonomous vehicles hold both promises and challenges, as different sectors and professions might undergo considerable changes, along with our idea of transport infrastructure. This paper aims to analyze future developments and effects of this technology by starting with a review of the related work. For this purpose, we have analyzed several papers with contrasting perspectives and conclusions. This paper is not limited to summarizing them but also points out relevant research directions.
1. Introduction
Modern society underwent deep changes due to technological progress during the last century [1]. Our ways of interacting with the world, the information we can access, the activities we can do, and even the existing jobs rely, to various degrees, on technology [2]. Despite the pervasiveness and impact of technological progress, commuting has been improved but not yet revolutionized. There are better engines able to use new types of energy, run more efficiently, produce less emissions, and last for longer [3,4,5]. Commuting represents a daily activity for most of society, and its duration has serious psychological implications that can be mitigated to improve well-being [6]. A promising path to achieving the long-awaited improvements regards autonomous driving: vehicles with increasing autonomy and responsibilities will progressively support the drivers in more and more functions. Most current systems have limited autonomy and assist in specific situations, such as emergency stops and lane tracking [7,8]. However, major efforts are pushing to develop completely autonomous solutions to make vehicles driverless. This will pave the way for more advanced and smarter ways of commuting, transporting goods, and sharing vehicles. Information travels at light speed, and important decisions lie at our fingertips while we are still commuting on the same paradigm of the last century, which is using human-driven vehicles. Society perceives the gap between autonomous and human-driven vehicles as huge, slowing the adoption of more technologically advanced solutions for commuting. This hesitation is mainly due to concerns about the safety, costs, and liability of autonomous vehicles [9].
The technological maturity of autonomous driving systems alone is insufficient to start a massive transition; trust in new-generation autonomous vehicles (AVs) is paramount to guarantee the diffusion of autonomous driving, along with new legal definitions to establish liabilities. Furthermore, the urban infrastructure will undergo changes and refinements to accommodate the new needs and possibilities of autonomous driving, from placing sensors and smart components to changing its geometrical structure [10]; technologically advanced vehicles offer the possibility of interacting with smart infrastructure, referred to as vehicle-to-infrastructure (V2I) communication, and with other peers in a protocol referred to as vehicle-to-vehicle (V2V) communication [11]. This will enable them to make smarter and more efficient decisions by accessing broader information. Further communication protocols can involve pedestrians, referred to as vehicle-to-pedestrian (V2P) communication, and a whole global network, referred to as vehicle-to-network (V2N) communication [11]. These protocols are encapsulated in the cellular vehicle-to-everything (CV2X) framework [11] to offer novel possibilities for interconnecting all vehicles, infrastructures, and people. This wider perspective makes the traditionally competitive commute (crossing an intersection as soon as possible, finding the best parking spot, etc.) a more cooperative and collective process where vehicles can decide to share resources in impossible ways for our current driving paradigm. The diffusion of these new technologies and improvement of the current infrastructures are slow processes that will gradually take place over decades rather than overnight; therefore, the harmonious co-existence of autonomous and traditional vehicles is paramount for ensuring a smooth and constant transition. The heterogeneity of human drivers that autonomous driving aims to reduce might be replaced with the heterogeneity and possible incompatibilities of these new solutions.
The contribution of this paper is to present a review to analyze and evaluate different aspects, promises, and challenges of these new solutions in connection with safety, economy, society and environment. These four aspects are deeply connected, and exhibit shared facets, offering different angles to analyze and predict the evolution of autonomous driving technologies. Our attention is cast on fully autonomous vehicles, as partial solutions are already available and do not significantly change the traditional human-driven paradigm. Several papers in the scientific literature have addressed the impact of autonomous vehicles; none considers the interplay and interdependence of these three aspects as in this paper, in particular for the societal acceptance and views on these new technologies. We aim to analyze future developments and effects of AVs; we do not provide data, numbers, or statistics. Instead, we review the related work.
We report several insights extracted from the literature and use them to support our vision of the future of autonomous driving. These remarks are further captured and elaborated in our consideration for future work, which should be aimed at verifying them.
The paper has one core section, Discussion (Section 2), describing the most outstanding results from the scientific literature on the themes of safety (Section 2.1), economy (Section 2.2), society (Section 2.3), and environment (Section 2.4). The reader will find that these themes are deeply intertwined. Therefore, some aspects will be analyzed differently in separate sections. We summarize and further elaborate results in the Conclusions section (Section 3). We will then provide our perspective in the Future Directions section (Section 4).
2. Discussion
In this Section, we discuss the impact of autonomous vehicles on the four themes of safety, economy, society, and environment.
2.1. Safety
The National Highway Traffic Safety Administration (NHTSA), in the National Motor Vehicle Crash Causation Study [12], reported four million crashes from 2005 to 2007 in the USA; of these, were reported as the drivers’ fault, and the errors were categorized as recognition (), decision (), and performance (). A similar report in the Slovak Republic [13] reports 14,000 accidents per year, with 7000 injuries and 300 casualties, of which might be avoided using AVs [14]. A more general report from the European Union [15] confirms this estimation, attributing of road accidents to human error. Autonomous vehicles are a promising way to reduce human error and increase safety and traffic conditions. They require shorter safety distance, as they have a shorter perception-reaction time, can travel faster and better maintain a constant speed and distance from other vehicles, and are not subject to tiredness or other performance-impairing behaviors [10,16,17,18]. In a study, Dahl et al. [17] estimated a reduction in road accidents when replacing human drivers with AVs, but they expected a first increment during the co-existence phase of autonomous and human-driven vehicles. Sukennik et al. [18] simulated car-following behavioral models by considering different proportions of human-driven and AVs and estimated a reduction of the safety distance of , which would lead to an increment of the road capacity from to . A similar car-following setup was exploited by Zhao et al. [16] to compare gaps, headway distances, and speed changes in human agents when they recognized the leading vehicle to be autonomous, showing a behavioral change depending on their trust in autonomous driving technologies. Therefore, behavioral change in humans is another important element to account for when modeling the transition from traditional to autonomous driving.
As described by Kocić et al. [19], AVs continuously alternate a perception and a planning phase, gathering from their sensors information that is then used to update local and global planning. The sensors available on AVs typically comprise but are not limited to cameras, radar, sonar, Light Detection and Ranging (LiDAR), Global Position System (GPS), and the Inertial Measurement Unit (IMU) [19]. The information accessible by human drivers relies on four of their senses (i.e., vision, hearing, smell, touch). Vision, for example, can be impaired by light conditions, eyesight obstructions (e.g., rain and snow), existing pathologies, or temporary physical conditions (e.g., tiredness, sickness). Self-driving vehicles can acquire visual and acoustic information through more accurate sensors and, therefore, determine their further actions more reliably. The data collected by these sensors is combined and transformed into meaningful information to use during the decision-making and reasoning process of the vehicle. The information extracted locally can be aggregated with global knowledge originating from other peers or the same infrastructures.
Son et al. [20] exploited V2V and V2I connectivity of AVs to provide information to human users, allowing for quicker and farther crash detection, improving safety, and preventing traffic jams. This better communication between passengers and vehicles can achieve higher safety and trust in the decisions made by autonomous and semi-autonomous entities during critical situations (e.g., emergency breaks, trajectory corrections, etc.). The psychological mechanisms regulating how humans interact with AVs that emerged in the experiments underlined, on the one hand, the necessity of transparency and immediate understanding of AVs actions and reasons while, on the other hand, the scarce trust of a part of society in autonomous technologies.
The safety aspect is not related only to a single vehicle but can concern a set of them. Autonomous vehicles collaborate to achieve common goals or compete to gain shared resources, so they must coordinate to do this safely [21,22]. One of the most suitable paradigms to model this scenario is represented by Multi-Agent Systems (MASs) [23]. For instance, Liang et al. [24] proposed a MAS-based distributed control architecture to manage the cooperation among autonomous vehicles that are part of a platoon. Besides supporting the cooperation, this approach exploits multi-constraints to ensure a safety inter-vehicle spacing, while granting the vehicle stability.
As we will better discuss in the next section, increasing safety could negatively impact employment in some specific sectors, such as insurance [25]. Of course, we think the increase in safety is worth it, even if it has collateral effects on jobs. However, negative effects must be accounted for.
Cybersecurity is a fundamental element of future vehicles, as the interconnection and interdependence between AVs might represent a major threat to passengers’ and pedestrians’ safety in the future. Having smarter vehicles introduces a new dimension of risk related to the resilience of their automatic software from malicious use and malfunctions. Cybersecurity has been defined as “the organization and collection of resources, processes, and structures used to protect cyberspace and cyberspace-enabled systems from occurrences that misalign de jure from de facto property rights” [26]; since AVs can be conceived as part of cyberspaces in which hardware (the vehicles), software (the algorithms), and people (the passengers) are interconnected by networks, the previous definition of cybersecurity is suitable our scope; some research has been carried out about cybersecurity in the field of AVs [27,28]. Cybersecurity is fundamental to granting AVs safety because misalignments between de jure and de facto properties can lead to accidents and injuries. Malicious usage of these new technologies might substantially affect safety, economy, and perception of AVs, threatening to fade the advantages of this new commute paradigm. Kim et al. [29] described the vulnerabilities of current networks and protocols used in AVs, which led to extensive research on attack detection. (Cyber)security of AVs is recognized as one of the most important aspects for the acceptance of AVs [25]. We remark on two important aspects in addressing cybersecurity in AVs: the former is the need for a security approach by design [30], which enables a higher level of security and can grant some properties; the latter is the availability of methods to test the security of the AVs’ algorithms [31].
Safety should also be addressed from a technological point of view [32,33]. Algorithms to automate driving can avoid human errors, such as distraction, sudden illness, speeding, etc.; however, the algorithms are not perfect, and programming errors or false interpretation of the data coming from the sensors [34] can lead to incorrect behaviors. Wang et al. [32] point out three types of errors:
- perception errors (e.g., wrong data from the sensors, misinterpretation of them);
- decision errors (e.g., generation of false alarm, missing information);
- action errors (e.g., wrong actuation by the actuators, bad command).
In addition, accidents can be caused by external factors, such as other vehicles and the environment. One useful aspect is that AVs produce a lot of data about driving, which can be analyzed to understand anomalous behaviors and correct and improve the systems; the drawback is that such data are hardly publicly available, so the analysis is typically carried out by the manufacturers only. Appropriate approaches to safety and security can decrease the risks while increasing the acceptance of AVs.
A final remark is about the trade-off between safety and performance. As said, autonomous vehicles are supposed to be safer because they rely on several sensors, apply different controls, and are immune to distractions and tiredness. However, this degree of planning and control requires time, which can slow down their performance. Humans can perform fewer controls and rely on their “instinct” to act with similar perception-reaction time, as shown by Markridis et al. [35], who found a similar reaction time between adaptive cruise control systems and human drivers. However, it is reasonable to assume that the next systems will be able to react at lower rates. An example is provided by Li [36], who considered the headway distance to the next vehicle as a trade-off between performance and safety. Smaller distances can increase the vehicle density on the road, increasing the road capacity, and being closer to the vehicle ahead can reduce air attrition and fuel consumption. This comes with an increased risk of collision, requiring vehicles with more sophisticated planning and shorter perception-reaction time, representing a technological challenge for current implementations.
2.2. Economy
The economic impact of AVs is deeply related to safety and society, as reducing road accidents and modifying the way people commute cause different costs and benefits for both individuals and countries. Autonomous driving offers many perks to the modern society and individuals, such as:
- Improved safety, due to the better precision and controls of AVs [9,18,20,36].
- Work-related or leisure activities during the commute will improve comfort [6,37,38].
- Fuel efficiency, due to the smoother driving, higher-level commuting patterns (i.e., platooning), and shared capacity of AVs [9,38,39].
- Better traffic management [39,40,41,42].
- Use of cars without or with special driving licenses, including people unable to drive due to age, legal, or physical impairment reasons [43,44].
- Support and extension of existing public transport systems, such as buses and car-sharing [17,18,42,45].
These pros present several safety, environmental, and economic advantages [42] beyond the increased comfort, but depend on the penetration rate of AVs. For example, points 3 and 4 could exploit the well-known platoon concept inside the vehicles fleet to optimize commutes [38] once AVs become diffused. Points 2 and 4 can help decrease the Value of Travel-Time Savings (VTTS) defined by Kolarova et al. [37]. VTTS represents the willingness to pay to avoid spending time on commutes. Since comfort onboard would increase due to stress reduction and more productive time management, people might be encouraged to use the car more often than public transportation. Interestingly, Kolarova et al. [37] also identified a more negative time perception in shared AVs than in individually owned ones and traditional public transportation, indicating a possible conflict between individual comfort and societal goals, as this preference might increase traffic and congestion due to the lower VTTS of privately owned AVs.
Human drivers will witness a gradual change in the infrastructure design due to AVs. They offer several economic advantages to both road users and maintainers. One of Othman’s works [38] describes novel ways to design more capable parking lots and how AVs can potentially increase road pavement rutting if no additional measures are taken to evenly distribute vehicles on the surface, such as lateral offsets. The accelerated decay of the asphalt and the potential intensification of the traffic due to heavy AV usage can lead to expensive maintenance costs and worsen traffic conditions. Khoury et al. [10] point out how AVs will have different requirements and limitations than human drivers, hypothesizing how these differences will affect future infrastructures. For example, a human and an AV’s vision can exhibit different eyesight, field of view, and height; an AV can also obtain an “extended” vision from its surroundings by other vehicles circulating or sensors integrated into the same road. The sensors installed on the AV can help reduce the required road illumination [46], which has environmental and economic advantages and increased reliability in rural environments or whenever infrastructure malfunction occurs [47]. These characteristics can pose different constraints on road angles, length of sags and crests, signal location, bridge span and span length, and parking lot and crossroad geometry [38].
Furthermore, an adequate penetration rate for AV can enable additional strategies to handle traffic. Novel approaches can simultaneously decrease fuel consumption, which presents economic and environmental advantages, and increase vehicle throughput, limiting further infrastructure expansions. An example is provided by Vujić et al. [48], who presented an analysis of three different approaches for managing intersections in the event of high-priority vehicles (escorted VIPs, in the discussed example). Such approaches can greatly benefit from technological advances in vehicles. The cited example considers modifications to the semaphores, but the same AVs could implement this protocol when they are well established.
AVs in worldwide urban planning are mostly overlooked and postponed; therefore, changes in the infrastructural design will likely unfold for a longer period than the AVs spreading due to the economic and planning efforts [38]. Further analysis of the factors required to consider a city “AV-ready” confirmed that most cities lack preparation, especially the smallest towns, for promoting adoption and usage [49]. New challenges will also arise with the diffusion of AVs, such as the problem of platooning heavy vehicles on bridges [38]. AVs will be plausibly able to fully exploit the opportunities offered by smart infrastructures only after they reach a sufficient penetration rate in society to justify the infrastructure upgrade; this will result in a transition phase where the vehicle’s behavior will change without direct control [10]. These upgrades should include better ways of recharging electric vehicles, as they will most likely represent most AVs. Currently, the most common way of recharging electric vehicles is using fixed recharging stations, whose speed depends on their technological level [50], but novel approaches are emerging to provide better solutions. One example can be the “battery swapping technology”, where the battery is replaced with a fully charged one to reduce the waiting time to the minimum [50]. Some solutions do not require a charging station but instead, transform the lane into a physical medium to convey electricity in the vehicles commuting on it, referred to as “charging lanes” [51]. The position, size, and technology can be optimized to guarantee adequate capacity while limiting the costs [50]. It is reasonable to suppose that the most advanced recharging techniques will be provided with consistent penetration rates and demand. The penetration rate is also a determinant for fostering the adoption of more advanced communication protocols. V2V is the easiest and most fundamental protocol to implement, as all AVs will need a communication module to participate in the most advanced interactions (i.e., V2I, V2N, and V2P); therefore, it will likely be the first to be implemented. The remaining techniques require additional technologies to handle the communication and involve the different actors (i.e., infrastructures, cloud computing infrastructures, pedestrians). Their implementation and maintenance costs will require adequate demand beforehand. Interestingly, an increase in the penetration rate will also make the protocol more difficult to handle, as discussed in [52]. As pointed out by Martínez-Díaz et al. [42], many factors influence the multidisciplinary field of mobility, making the technological transition gradual and slow. They also describe a concrete risk of observing an increase in private car commuting, for which strategies to improve the average number of passengers on AVs are fundamental.
Cities may be redesigned to convert the space saved using AVs, such as parking and multi-lane roads, to other purposes, such as green areas and public spaces, increasing the wellness and the eco-friendliness of urban centers [45]. The full potential offered by AVs in revolutionizing the urban structure will take place only after they completely replace traditional vehicles. Therefore, most of these perks will not be available soon. Nevertheless, as shown by Gambelli et al. [53], a “gradual” installation of smart infrastructures could still lead to improvements in the management of autonomous vehicles and benefits for people and the environment. Therefore, administrations can split the investments into different years, making them more sustainable.
The improvements promised by AVs in terms of traffic efficiency rely on adequate penetration rates to become effective. In the transition phase that will unfold, the new solutions built on smart vehicles and infrastructures must account for and comply with human-driven cars. The literature comprises works centered on crossing management at different levels, from smart infrastructures handling traffic [39,41] to decentralized solutions relying only on V2V communication, where additional hardware/software can be installed on traditional vehicles [40]. Depending on the penetration rate of self-driving cars, different solutions become available, and their pros and cons change importance. The cost of AVs was estimated by Anderson et al. [54] around $150,000 in 2014. This is likely to constrain the number of private owners and make publicly shared AVs the most diffused form of autonomous driving for the first part of the transition. This might foster a positive usage of AVs and reduce their potential drawbacks.
A study on AV diffusion in Spain [45] points out how different sectors will react to this revolution:
- The automotive industry will see a gradual but substantial reduction in the number of vehicles if shared AVs gather momentum, but the maintenance and replacement of AVs will be more frequent due to their higher usage.
- The insurance sector will experience an increase due to the augmented price for insuring AVs in the first period, then a decrease due to a reduction in the total vehicles and accidents.
- Professional drivers will provide support in the case of emergency failures in the first stage of AV diffusion, but they might lose their jobs when the technology reaches full maturity.
- Fossil fuels will significantly diminish due to the transition to cleaner energy sources.
European cities present unique features when compared to those of other continents. Historically, public transportation has been far more common in European cities than in American ones, leading to denser populations and car-free areas in the former [55]. This predisposition is likely to kindle the usage of AVs for car-sharing in European cities, despite we can expect that private AVs will be more popular in less populated areas. Several European countries started exploring autonomous driving with the common goal of achieving sustainable development [55]. Each member state presents unique geographical, socio-economic, and political characteristics, which influence the speed of adoption of AVs [55,56]. Similarly, each European city differs from the others, suggesting that universal solutions are unlikely to be effective [55].
Kim [57] proposes some interesting forecasts following the introduction of AVs. The oil sector is expected to have a lower demand for powering vehicles but might increase for producing electricity if renewable sources are not exploited. The demand for private cars should drop if shared vehicles become diffused. These forecasts, dated 2018, have not become completely true yet, because the AVs are not as spread as expected and possibly also because the pandemic period has slowed down many activities.
Another important aspect to consider, which impacts both the economy and society, is the change in the job market. This issue has been addressed in [25,45]. Klaver [25] states that the three sectors that will lose the highest number of job positions will be driving occupations, servicing and repair centers, and the insurance industry. Driving occupations are expected to shrink due to the obvious lower number of drivers required with vehicles able to drive themselves. This has bad consequences on society and employment, and it is one of the major concerns about the spread of autonomous vehicles [58,59]. Of course, this is a serious concern if the change takes place too fast for society to adapt to the new job market. Similar changes in the job market happened in the past, for instance, the replacement of horses with cars for transporting goods, but they took place in a rhythm that allowed the old generation to retire and the new generation to adapt to the emerging jobs [60]. Governments should support the shift from the old jobs (drivers) to the new ones (technology workers) through policies regulating the adaptation. Indeed, some initiatives go in this direction, as described in [61]. The repairing centers and insurance companies are also expected to wane due to the fewer accidents expected from AVs [25]. In case of other adverse events, for instance, theft or vandalism, the technological advancement of AVs should ensure sufficient physical security to avoid the former and discourage the latter [62]. The reduced demand will likely lead to employment drops across these sectors. This impression is confirmed by a survey in China conducted by Xu and Fan [63], where potential AV users expect a reduction in both accidents and insurance premiums. On the other hand, healthcare might greatly benefit from the reduced number of accidents and dedicate more resources towards different health-related issues [64]. The benefits of AVs on healthcare also include other positive effects, for instance, reduced air and noise pollution and less sedentary time [64].
2.3. Society
Society has become increasingly more aware of autonomous driving and its characteristics and will experience partial automation before fully autonomous products are made commercially available [43]. A general concern towards AVs is their lack of transparency and explainability, which indicates their opacity to external users. Understanding AVs’ reasoning processes and motivations is paramount to trust them. This problem is diffused in many sectors where Artificial Intelligence (AI) is applied, and it kindled a great interest in Explainable Artificial Intelligence (XAI). The need for XAI is especially felt in sensitive fields like healthcare, economy, law, and transportation, where people’s lives, rights, and well-being can be seriously impaired by an unfair decision [65,66]. This recent awareness led to the formulation of a “right to explainability”, defined in Recital 71 of the General Data Protection Regulation (GDPR) of the European Union and the Algorithmic Accountability Act decreed by the US Congress (H.R. 6580 of 2022) [67,68]. A survey from Thomas et al. [43] identifies several concerns about safety, performance, price, liability, and interaction with non-AV vehicles. They identified people between 36 and 65 years old as particularly reluctant to drive AVs, in sharp contrast with younger and older people, while another study found that the acceptance rate of AVs among people older than 50 years old is relatively modest [42]. Lazanyi analyses the factors that influence risk perception in AVs [69] and the choices that people make consequently:
- The first aspect is gender: she points out that males and females have different perceptions, with the former being more open to new technology and considering it less risky compared to the latter.
- The second aspect is age: it is interesting to note that it has a different impact on males and females, leading older males to be more doubtful and older females to be more open.
- The third factor is the cultural influence, even if this factor is less susceptible to gender and age.
Some approaches can identify threats to privacy in autonomous vehicles [70]. These include Linkability, Identifiability, Non-repudiation, Detectability, Disclosure of information, Unawareness, Non-compliance (LINDDUN) [71] and the Privacy Enhancing Technologies (PETs) [72] methods.
Two of the major concerns for potential AV users, safety and liability, are deeply interconnected, as failures and malfunctioning might harm either people inside and outside the vehicle or other properties. Despite the quality and testing of AVs, a marginal risk is irremovable [13]; furthermore, even if the AV behaved faultlessly, this must be proved in the case of unfortunate events. A possibility is considering the manufacturer liable and responsible for the behavior of the AV, except in conditions of severe negligence in its maintenance, in which case it is the owner’s fault [13]. What “severe negligence” means is not well defined yet, but if the user has, for instance, to watch over the AV during the whole commute, then the better VTTS defined before loses importance. This requires both manufacturers and owners to have a certain degree of trust in the vehicle. This depends on how society perceives AVs, which could be biased in the case of dramatic events and personal experience [73].
The penetration rate of AVs in the society is based on several factors. Shabanpour et al. [73] identified several psychological factors driving the adoption of autonomous vehicles. These cover the whole gamut of human characteristics, such as the average distance traveled, technology awareness, and previous history of road accidents.
An issue pointed out in different works is the uncertainty about the impact of AVs on social inequalities [74,75,76,77]. On the one hand, the chance of exploiting AVs should enable everyone to have access to comfortable mobility, even without a car or a driver’s license. On the other hand, since AVs represent a new technology, its access can be reduced to some classes of people who can afford it; moreover, already now the vehicles (and in particular the private cars) represent a “status symbol” that differentiates different classes of people on the base of the economic position. However, the availability of money is not the only factor that can cause inequalities. Others can be gender, age, and so on since different risk perceptions [69] can encourage or discourage whole classes of people from accessing the new technology. Kim et al. [57] also propose some perspectives about the impact on society or, better, the environment; it, in general, should benefit from the introduction of autonomous vehicles, in particular the electrical ones, but the real advantages must be demonstrated because they will still require energy, which is produced using sources not always renewable and increasing the pollution.
In connection to the environment, refs. [57,74] discussed how the spread of AVs can change the shape and the exploitation of the land. For instance, in a world where vehicles do not need to be parked or can be parked more efficiently [38], the administration must decide what to do with the unused (and sometimes huge) parking areas. As mentioned in the previous section, they can be converted to green areas or other public welfare structures, but this is a political choice with clear social impacts [45]. Greenblatt and Shaheen [78] described antipodal considerations on the impact of AVs on the environment. They explain how, on the one hand, AVs would reduce parking areas, drive more smoothly, and allow more effective car-sharing. On the other hand, the average kilometers traveled might skyrocket due to (i) the autonomy of AVs to travel for fueling/parking themselves, (ii) the increased amount of people that can use AVs to commute, (iii) the empty trips to serve other users (dead-heading), and (iv) the increased general amount of commutes due to the ease of use [78,79]. Interestingly, there is a lack of consensus on the emissions saved using AVs, with even sources indicating an actual increase in pollution [78]. As pointed out by Gavanas [55], the population density and the city structure play a determinant role in stimulating public or private AVs. Therefore, it is likely that the actual impact of AVs on emissions will change with their geographical deployment. An important element in this consideration is the risk of “urban sprawl” [80], which is the “tendency toward lower city densities as city footprints expand”. This negatively affects the economy and environment, as more infrastructures and vehicles are needed, public transportation and car-sharing provide less coverage, sustainable commuting becomes more expensive, the average mileage increases, and traffic jams are more likely to happen. Furthermore, space is used less efficiently, resulting in more natural spaces occupied by households. AVs risk making commuting so easy that people will live even further from the cities, increasing this phenomenon.
The perspective of losing jobs or having a significant change in some sectors [25,45] affects not only the economy (as already discussed in the previous section) but also society. Setting aside unemployment, which would require much more space than a single paper, we point out that new education and training forms are needed to exploit people whose profession is threatened. For instance, the introduction of AVs will eliminate the need for human drivers; however, their experience would be the most valuable to support the first phase of AV diffusion, to help develop better algorithms, train the AVs, and tune their management [81]. On the other hand, having only AVs implies that the driving experience and learning how to drive vehicles will risk becoming lost. Despite this, we believe that driving vehicles will survive, as the horse-riding experience has not been lost when cars have substituted horses.
As mentioned, technologies must adapt to the users, not vice versa. For this purpose, human-centered design is a developmental approach dedicated to this goal [82,83]. This guarantees excellent adaptability and a smooth transition to the developed solution. Ethical issues can be properly addressed, considering humans first, before other aspects such as money, savings, material, etc.; for example, the vehicle should be programmed to save human life in unexpected situations such as a pedestrian that suddenly appears in front of the vehicle (besides the famous “trolley dilemma”, which is very theoretical, there are many more practical situations in which the vehicle must take a decision). Furthermore, economic benefits are provided since this enhances its adoption and affirmation as a new technological standard. Like any other robot, AVs should adapt to the human world to foster engagement with human beings [84]; users’ emotions are strong drivers in this process, as pointed out by Cha [85], and meeting people’s desires and expectations increases social acceptance.
2.4. Environment
All the previously mentioned aspects of autonomous driving inevitably affect the natural environment [86]. In particular, we recall using sensors to reduce the road illumination required, the increased reliability in rural environments, the chance to gradually adapt the intelligent infrastructure supporting AVs, and so on. In this section, we add some further considerations related to the environment.
Reducing the number of vehicles, their mileage and fuel consumption, or even the number of necessary parking lots can dramatically impact the environment, despite we started describing these possibilities from an economic perspective. Conversely, overusing this technology can negatively affect the environment by increasing the number of vehicles, the mileage and fuel consumption, and the parking space required.
Conscious usage of AVs could help revert the more and more obvious phenomenon of global warming. The automotive industry is estimated to represent about of the CO2 emitted globally by mankind [87]. Private vehicles are responsible for approximately of the total greenhouse gases produced [88]. AVs equipped with electric or hydrogen engines could contribute to reducing this build-up [89]. Interestingly, Ahmed et al. [88] describe a worse environmental footprint for shared autonomous electric vehicles than for privately owned electric vehicles. The parameters considered were global warming potential, energy demand, and associated water consumption. The authors attributed this difference to the distance traveled by AVs without any passengers to reach other users (dead-heading) and to the greater power consumption associated with automation systems. There is no strong consensus on the actual mileage an AV would travel without any passengers, as sources report shares ranging from 10% to 50% [90,91]. The reduced lifetime associated with the power consumption of automation-enabling components is about [88]. The results indicate that “it takes more than one shared autonomous electric vehicle to replace a single (privately owned) electric vehicle” when considering the same type of battery [88]. Conversely, when considering larger batteries (200,000-m range, corresponding to approximately 320,000 km), the results revert when the dead-heading is modest [88]. This emphasizes a common critique of electric vehicles: the lack of environmental sustainability of the industrial processes necessary for manufacturing batteries [92]. Xia and Li [93] report a higher environmental impact in electric vehicles than internal combustion engine vehicles when accounting for battery manufacturing. Sustainable battery manufacturing is, therefore, fundamental for ensuring that the large-scale diffusion of AVs is feasible, beneficial, and able to deliver its promises. Further advances in the energy efficiency of these systems, as described in [94], could help to reduce the environmental impact by increasing the mileage for electrical AVs.
The environmental impact of autonomous driving will also depend on the durability and maintenance of AVs. Nangia et al. [95] describe how autonomous vehicles are ideal for durability testing due to their precision and repeatability. These properties could help AVs to increase their durability by reducing structural stress and road fatigue [95]. This could, for example, help counter-balancing the scarce sustainability of battery manufacturing by reducing the replacement of other components. Nonetheless, this topic has not been directly covered by the literature up to this date. Another element that could make AVs more durable is the eventual imposition of stricter maintenance requirements discussed in Section 2.1. This could reduce the possibility of unexpected behavior and safety risks. This could further increase the reliability and durability of AVs. Conversely, fast technological leaps could lead to a faster turnover.
3. Conclusions
We consider the field of autonomous driving as still unripe for expressing its full potential. Its development and diffusion are still uncertain, and many questions must be addressed before giving a concrete and reliable prediction. The exact impact these technologies will have on society is hard to predict and relies on society’s perception of AVs. This uncertainty is described in Figure 1, where pros and cons can equally originate from every theme. This perception is influenced by many factors, such as the trust in this technology, the economic costs to access it, the magnitude of the benefits and disadvantages, and its perceived utility. Excessive usage or misuse of this technology might lead to a massive diffusion of privately owned AVs; this behavior would nullify some of the economic, social, and environmental benefits that we reported. The policies and structure of each city can promote public transport (i.e., European urban centers, due to their population density and areas not accessible to private cars) or private usage (i.e., American urban and rural areas, due to the lower population density). European cities tend to favor public transport due to their structures, as they have historical centers that limit private vehicles; this characteristic could make the most invasive technological upgrades more expensive or even impractical, limiting the advantages of AVs.
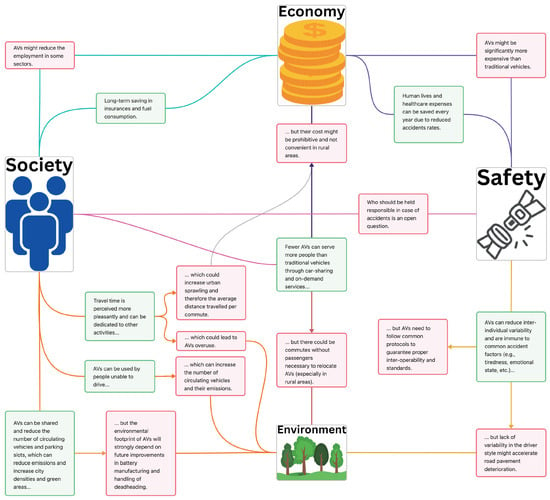
Figure 1.
Diagram of the pros (in green) and cons (in red) of the four themes considered. The links are colored depending on the themes they connect. The only oriented links are those connecting yes…but nodes.
The faster the initial momentum, the sooner the benefits derived by high penetration rates will be available. At the same time, the economic cost will be steeper and less sustainable in the short period, even though it can pay off through improved safety, reduced emissions, and fewer vehicles circulating. Fast adoption could also compromise the capacity of society to adapt to the change, with tremendous effects on the job market. If AVs will reduce the number of circulating vehicles, insurance and repair companies might experience huge losses. This assumes that AVs do not require more mechanical maintenance or more expensive insurance than traditional vehicles and that accidents will be less frequent. They may as well have higher maintenance and repair costs than traditional vehicles. Accidents could be much more expensive if they involve AVs, as their repair could be equivalent to repairing several traditional vehicles. This risk would, however, be mitigated by the reduced likelihood of accidents, the increased safety offered by AVs, and the reduced harm to human lives. Notably, the reduced harm towards human lives is a positive factor for both ethics and the economy, as injuries can represent a huge medical cost and a reduction of production in a country. It is currently hard to verify whether and to what degree AVs are more expensive than traditional vehicles, as also traditional vehicles present different costs. Also, a comparison between the costs of an accident involving traditional vehicles and AVs is not readily available in the literature, but it is worth exploring.
New-generation vehicles depend on legal and economic aspects that may obfuscate their advantages. A human’s role of responsibility in guaranteeing the correct functioning of his/her AV can be a blurry concept that is not easy to identify and prove. This responsibility might require the owner to perform periodic check-ups or even to remain steady and alert for the whole commute, making it less enjoyable and productive. Furthermore, if the owner is required to stay alert on the vehicle for its whole activity, then AVs will not be able to, for example, reach other users with autonomy. The real autonomy we allow AVs to operate is based on how much they are trustworthy.
There is a non-negligible risk of replacing human-related with vendor-related heterogeneity, threatening AVs’ diffusion and usage. The lack of coherent and homogeneous technologies could hinder the creation of smart infrastructures and communications between AVs. This needs to be addressed by creating international standards and protocols to guarantee consistent behavior and functioning. The interaction between traditional and driverless vehicles is also uncertain. We previously reported how the behavior of human drivers can change in proximity to AVs, representing a potential issue. Furthermore, the impact of AVs on traffic requires a higher level of communication unknown to human drivers. Additional hardware and software can upgrade traditional cars to support V2V or create smart infrastructures to communicate with autonomous and human-driven vehicles. Furthermore, advanced and high-level commute patterns, such as platooning, are harder to obtain in hybrid scenarios, and the benefits they yield will be dampened in the first transition period. Lastly, the performance improvement of AVs has still to become clear, as current technologies are still comparable with humans in some areas, such as perception-reaction when the head vehicle performs a full stop [35], and the aleatory behavior of human drivers can become useful, for example, to have uniform pavement deterioration [38].
One important aspect that emerges from our review is that trust, safety, and cybersecurity are key points for accepting AVs; people will embrace the transformation of our economy and society only if the new technologies do not decrease the safety and security of our lives.
This review took a broader perspective than previously published works by highlighting the intricacy of risks and benefits related to AVs from different perspectives. Autonomous driving can assume positive or negative connotations depending on specific factors from the environment in which it is implemented. Refs. [96,97] described this subjectivity in analyzing human acceptance, proving that subgroups show substantial differences. One of the main limitations of this study is the scarcity of available data on AVs in real scenarios. We do not aim to provide further data and statistics but rather an outlook on the current perspectives in the literature, which are also based on relatively small data sources. Experimental data from simulations can easily prove unreliable in real settings due to underestimated or neglected factors, such as human behavior. Practical implementation of autonomous driving technologies in the real world will clarify the results and contradictions reported in this study. It is hard to accurately estimate AVs’ impact on many parameters, such as fuel consumption, space usage, and accident rates. Rahman and Thill [98] point out the shortcomings in several reviews on urban transportation and environment due to the lack of AVs in real scenarios or excessive specificity in the analysis (e.g., focusing only on specific usages of AVs), indicating how the actual outcomes may diverge from those supposed. A comprehensive review is offered by Duarte and Ratti [99], where they share the same concerns we have about the real impact of AVs on traffic volumes since it depends on the users’ perception and usage of this technology (and geographical/cultural elements, we assert). They also discuss the impact of AVs on urban sprawling due to the different perceptions of travel time, but they do not point out how this could lead to overusing AVs, nor the changes in the job market affected by them. Kopelias et al. [100] offer a perspective more centered on the environment and the legal regulations being set in place to protect it. They share our vision of how AVs can provide several benefits to the environment due to smoother driving, smarter routing, an organization in platoons, and, in general, push the market towards electric engines, but also recognize the risk of an actual increase in private vehicles due to the enlarged pool of people that can commute independently.
We considered these concurrent and often contradicting aspects as opportunities to underline the uncertainty of the future and provide a holistic picture of the questions related to this technology. None of the works we analyzed simultaneously addressed all the topics we covered in this analysis or considered geographical specifics. For this reason, this research offers a unique and complete discussion of the issues related to AVs in modern societies worldwide. The interdependencies between the aspects we discussed are fundamental in how AVs will influence society, as every individual will analyze the perspectives we provided through his/her lens, from which a unique interpretation will emerge. For instance, an individual particularly concerned about environmental issues may choose alternative commuting solutions, such as public transportation, rather than purchasing an electric car; conversely, people with disabilities may be more inclined to adopt these solutions for their needs. This individual variability is a crucial reason we cannot provide solid forecasts about the future. Furthermore, the peculiarities of each environment will likely lead to different policies, which could impede the homogeneous management of AVs. How society will react to the proposed innovations may also have cascading effects on other transportation means, such as trains and planes. This can enable regulators to tailor the pros and cons to the local constraints and needs, but it could hinder a universal approach and, therefore, limit some of the broader advantages, such as fuel consumption and environmental safeguards. Different regulatory bodies may favor some aspects over others, such as prioritizing access to these technologies for people with disabilities rather than encouraging shared rides. Different requirements may also forbid specific kinds of vehicles from circulating in certain regions, with obvious discomforts in the case of long-range commutes. We want to enhance how different policies will change the balance between the pros and cons described in Figure 1, as each country will shape this technology for its needs, increasing some pros and while exacerbating some cons. We pointed out possible discrepancies in the future by explicitly referring to narrow reviews focused on specific countries.
4. Future Directions
We propose a precautionary approach to the massive introduction of AVs. We are not “against” AVs because we recognize the evident benefits they can offer, but we are aware of the possible risks associated with early AV technology. This technology has the potential to impact many sectors of society and is an important part of our daily lives. Therefore, it cannot be addressed in the same ways as other technologies, and the policies regulating them can have impressive effects. People often expect new technology to increase their free time by reducing the time to work, commute, or do other unwanted activities. For instance, let us consider the washing machine: one can think that it saves much time that in the past was dedicated to housekeeping; however, the time for housekeeping has not been reduced remarkably; instead, we have cleaner clothes because we wash them more often. Indeed, AVs do not exhibit only positive aspects. We should have the same expectations with autonomous driving, as proper usage is necessary for benefitting from the positive aspects while limiting the risks. Their overuse might transform some pros into cons, like increasing the number of vehicles available and increasing traffic, pollution, and urbanization. Society will undergo complex changes during this transition phase. Many sectors will be strongly reshaped and resized, and new professions might arise to fill the gap left. Therefore, we propose careful planning to create widely supported technologies with high degrees of compatibility and a particular focus on interpretability and transparency. As previously described, having transparent and easily interpretable systems is paramount for trusting them and fostering their diffusion. Indeed, people have individual opinions and beliefs that can make them more attracted or reluctant towards autonomous driving. Having explainable systems is also important to guarantee human safety. Therefore, having trustworthy systems presents several advantages for their adoption and correct functioning. Another aspect worth considering is the willingness of the general public to start using these solutions, as negative events related to autonomous driving might have an important effect on impeding its diffusion. Education and correct information on these technologies’ potential and dangers are fundamental to fostering the spread of these novelties and favoring positive behaviors, such as traffic reduction through shared AVs, rather than allowing improper and unethical usage. As the adoption of AVs will most likely require a long period, the infrastructure should undergo a moderate and progressive upgrade, compatible with the financial, design, and implementation requirements.
As mentioned, the safety of autonomous vehicles is achieved by exploiting different sensors and performing different controls, which can slow down their performance. An interesting research direction can be the trade-off between safety and performance in AVs. With the co-presence of human-driven and autonomous vehicles, it would be interesting to define their models to understand what and how they differ, enable their simulation, and take advantage of their co-presence. Simulations are useful in this field because they help understand the impact of different strategies. The more the driver models are precise, the more accurate the results will be. Using modeling production-ready AVs might help frame their performance and characteristics rather than relying on assumptions. In connection with simulations, an important aspect is defining appropriate metrics to measure the impact of different strategies. These metrics are useful not only for technological assessments but also for political evaluations by the public administration.
The actual outcome of the diffusion of autonomous driving vehicles relies on many factors that are not easily adjustable or foreseeable. As commuting influences many, if not all, aspects of our lives, each individual in society plays a role in this process. This technology holds terrific potential for improving our quality of life, but this heavily depends on its usage.
Author Contributions
Both authors (L.G. and G.C.) equally contributed to writing, editing, and type-proofing this manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results. Luca Gherardini is an employee of Sano Centre for Computational Personalised Medicine. The paper reflects the views of the scientists and not of the company.
Abbreviations
The following abbreviations are used in this manuscript:
| AV | Autonomous Vehicle |
| VTTS | Value of Travel-Time Savings |
| V2I | Vehicle-to-Infrastructure |
| V2V | Vehicle-to-Vehicle |
| V2N | Vehicle-to-Network |
| V2P | Vehicle-to-Pedestrian |
| CV2X | Cellular Vehicle-to-Everything |
| NHTSA | National Highway Traffic Safety Administration |
| LiDAR | Light Detection and Ranging |
| GPS | Global Position System |
| GDPR | General Data Protection Regulation |
| PETs | Privacy Enhancing Technologies |
| LINDDUN | Linkability, Identifiability, Non-repudiation, Detectability, Disclosure of information, Unawareness, Non-compliance |
| IMU | Inertial Measurement Unit |
References
- Cowan Schwartz, R. The “industrial revolution” in the home: Household technology and social change in the 20th century. Domest. Ideol. Domest. Work. 2012, 17, 375–397. [Google Scholar] [CrossRef][Green Version]
- Weil, M.M.; Rosen, L.D. The psychological impact of technology from a global perspective: A study of technological sophistication and technophobia in university students from twenty-three countries. Comput. Hum. Behav. 1995, 11, 95–133. [Google Scholar] [CrossRef]
- Shuai, S.; Ma, X.; Li, Y.; Qi, Y.; Xu, H. Recent Progress in Automotive Gasoline Direct Injection Engine Technology. Automot. Innov. 2018, 1, 95–113. [Google Scholar] [CrossRef]
- Hirata, H. Recent Research Progress in Automotive Exhaust Gas Purification Catalyst. Catal. Surv. Asia 2014, 18, 128–133. [Google Scholar] [CrossRef]
- Verhelst, S.; Wallner, T. Hydrogen-fueled internal combustion engines. Prog. Energy Combust. Sci. 2009, 35, 490–527. [Google Scholar] [CrossRef]
- Clark, B.; Chatterjee, K.; Martin, A.; Davis, A. How commuting affects subjective wellbeing. Transportation 2020, 47, 2777–2805. [Google Scholar] [CrossRef]
- Coelingh, E.; Eidehall, A.; Bengtsson, M. Collision warning with full auto brake and pedestrian detection—A practical example of automatic emergency braking. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 155–160. [Google Scholar] [CrossRef]
- Cerone, V.; Milanese, M.; Regruto, D. Combined automatic lane-keeping and driver’s maneuvers through a closed loop control strategy. IFAC Proc. Vol. (IFAC-PapersOnline) 2007, 5, 159–166. [Google Scholar] [CrossRef]
- Yuen, K.F.; Wong, Y.D.; Ma, F.; Wang, X. The determinants of public acceptance of autonomous vehicles: An innovation diffusion perspective. J. Clean. Prod. 2020, 270, 121904. [Google Scholar] [CrossRef]
- Khoury, J.; Amine, K.; Abi Saad, R. An Initial Investigation of the Effects of a Fully Automated Vehicle Fleet on Geometric Design. J. Adv. Transp. 2019, 2019, 6126408. [Google Scholar] [CrossRef]
- Dey, U.K.; Akl, R.; Chataut, R. Performance Improvement in Cellular V2X (CV2X) by Using Low Density Parity Check (LDPC) Code. In Proceedings of the 2022 IEEE 13th Annual Ubiquitous Computing, Electronics and Mobile Communication Conference, UEMCON 2022, New York, NY, USA, 26–29 October 2022; pp. 296–302. [Google Scholar] [CrossRef]
- Critical Reasons for Crashes Investigated in the National Motor Vehicle Crash Causation Survey; Technical Report March, National Highway Traffic Safety Administration, US Department of Transportation: Washington, DC, USA, 2018.
- Ilkova, V.; Ilka, A. Legal aspects of autonomous vehicles—An overview. In Proceedings of the 2017 21st International Conference on Process Control, PC 2017, Strbske Pleso, Slovakia, 6–9 June 2017; pp. 428–433. [Google Scholar] [CrossRef]
- Bertoncello, M.; Wee, D. Ten Ways Autonomous Driving Could Redefine the Automotive World; Mckinsey&Company: Chicago, IL, USA, 2015; pp. 1–6. [Google Scholar]
- The Report of the High Level Group on the Competitiveness and Sustainable Growth of the Automotive Industry in the European Union. In Gear 2030; European Union: Brussels, Belgium, 2017; pp. 1–74.
- Zhao, X.; Wang, Z.; Xu, Z.; Wang, Y.; Li, X.; Qu, X. Field experiments on longitudinal characteristics of human driver behavior following an autonomous vehicle. Transp. Res. Part C Emerg. Technol. 2020, 114, 205–224. [Google Scholar] [CrossRef]
- Dahl, A.; Fléchon, S.; Peter, S.; Walther, C. Microscopic Simulation and Impact Assessment of the coexistence of automated and conventional vehicles in european cities. In Proceedings of the European Transport Conference, Dublin, Ireland, 10–12 October 2018. [Google Scholar]
- Sukennik, P.; Lohmiller, J.; Schlaich, J. Simulation-Based Forecasting the Impacts of Autonomous Driving. Transp. Res. Procedia 2018, 6–8. [Google Scholar]
- Kocic, J.; Jovicic, N.; Drndarevic, V. Sensors and Sensor Fusion in Autonomous Vehicles. In Proceedings of the 2018 26th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–21 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 420–425. [Google Scholar] [CrossRef]
- Son, S.o.; Jeong, J.; Park, S.; Park, J. Effects of advanced warning information systems on secondary crash risk under connected vehicle environment. Accid. Anal. Prev. 2020, 148, 105786. [Google Scholar] [CrossRef] [PubMed]
- Bertogna, M.; Burgio, P.; Cabri, G.; Capodieci, N. Adaptive coordination in autonomous driving: Motivations and perspectives. In Proceedings of the 2017 IEEE 26th International Conference on Enabling Technologies: Infrastructure for Collaborative Enterprises (WETICE), Poznan, Poland, 21–23 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 15–17. [Google Scholar]
- Mariani, S.; Cabri, G.; Zambonelli, F. Coordination of autonomous vehicles: Taxonomy and survey. ACM Comput. Surv. (CSUR) 2021, 54, 1–33. [Google Scholar] [CrossRef]
- Van der Hoek, W.; Wooldridge, M. Multi-agent systems. Found. Artif. Intell. 2008, 3, 887–928. [Google Scholar]
- Liang, J.; Li, Y.; Yin, G.; Xu, L.; Lu, Y.; Feng, J.; Shen, T.; Cai, G. A MAS-based hierarchical architecture for the cooperation control of connected and automated vehicles. IEEE Trans. Veh. Technol. 2022, 72, 1559–1573. [Google Scholar] [CrossRef]
- Klaver, F. The economic and social impacts of fully autonomous vehicles. Retrieved Febr. 2020, 18, 2022. [Google Scholar]
- Craigen, D.; Diakun-Thibault, N.; Purse, R. Defining cybersecurity. Technol. Innov. Manag. Rev. 2014, 4, 13. [Google Scholar] [CrossRef]
- Sun, X.; Yu, F.R.; Zhang, P. A survey on cyber-security of connected and autonomous vehicles (CAVs). IEEE Trans. Intell. Transp. Syst. 2021, 23, 6240–6259. [Google Scholar] [CrossRef]
- Yağdereli, E.; Gemci, C.; Aktaş, A.Z. A study on cyber-security of autonomous and unmanned vehicles. J. Def. Model. Simul. 2015, 12, 369–381. [Google Scholar] [CrossRef]
- Kim, K.; Kim, J.S.; Jeong, S.; Park, J.H.; Kim, H.K. Cybersecurity for autonomous vehicles: Review of attacks and defense. Comput. Secur. 2021, 103, 102150. [Google Scholar] [CrossRef]
- Bruce-Boye, C.; Eisenbarth, T.; Krebbel, M.; Fechner, A.; Luyken, R.; David, T. Autonomous Driving and Cybersecurity by Design. In MIMO Communications-Fundamental Theory, Propagation Channels, and Antenna Systems; IntechOpen: London, UK, 2023. [Google Scholar]
- Malayjerdi, M.; Roberts, A.; Maennel, O.m.; Malayjerdi, E. Combined Safety and Cybersecurity Testing Methodology for Autonomous Driving Algorithms. In Proceedings of the 6th ACM Computer Science in Cars Symposium, Ingolstadt, Germany, 8 December 2022; pp. 1–10. [Google Scholar]
- Wang, J.; Zhang, L.; Huang, Y.; Zhao, J. Safety of autonomous vehicles. J. Adv. Transp. 2020, 2020, 8867757. [Google Scholar] [CrossRef]
- Mariani, R. An overview of autonomous vehicles safety. In Proceedings of the 2018 IEEE International Reliability Physics Symposium (IRPS), Burlingame, CA, USA, 11–15 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 6A. 1-1–6A. 1-6. [Google Scholar]
- Berk, M.; Schubert, O.; Kroll, H.M.; Buschardt, B.; Straub, D. Exploiting Redundancy for Reliability Analysis of Sensor Perception in Automated Driving Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 5073–5085. [Google Scholar] [CrossRef]
- Makridis, M.; Mattas, K.; Ciuffo, B. Response Time and Time Headway of an Adaptive Cruise Control. An Empirical Characterization and Potential Impacts on Road Capacity. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1677–1686. [Google Scholar] [CrossRef]
- Li, X. Trade-off between safety, mobility and stability in automated vehicle following control: An analytical method. Transp. Res. Part B Methodol. 2022, 166, 1–18. [Google Scholar] [CrossRef]
- Kolarova, V.; Steck, F.; Bahamonde-Birke, F.J. Assessing the effect of autonomous driving on value of travel time savings: A comparison between current and future preferences. Transp. Res. Part A Policy Pract. 2019, 129, 155–169. [Google Scholar] [CrossRef]
- Othman, K. Impact of autonomous vehicles on the physical infrastructure: Changes and challenges. Designs 2021, 5, 40. [Google Scholar] [CrossRef]
- Cabri, G.; Gherardini, L.; Montangero, M.; Muzzini, F. About auction strategies for intersection management when human-driven and autonomous vehicles coexist. Multimed. Tools Appl. 2021, 80, 15921–15936. [Google Scholar] [CrossRef]
- Gherardini, L.; Cabri, G.; Montangero, M. Decentralized approaches for autonomous vehicles coordination. In Internet Technology Letters; Wiley Online Library: Hoboken, NJ, USA, 2022; p. e398. [Google Scholar] [CrossRef]
- Cabri, G.; Crisci, S.; Montangero, M. Traffic Flow Modelling When Autonomous Vehicles Coexist with Human Driven Vehicles: Perspectives and Challenges. Stud. Comput. Intell. 2022, 1026, 169–177. [Google Scholar] [CrossRef]
- Martínez-Díaz, M.; Soriguera, F.; Pérez, I. Autonomous driving: A bird’s eye view. IET Intell. Transp. Syst. 2019, 13, 563–579. [Google Scholar] [CrossRef]
- Thomas, E.; McCrudden, C.; Wharton, Z.; Behera, A. Perception of autonomous vehicles by the modern society: A survey. IET Intell. Transp. Syst. 2020, 14, 1228–1239. [Google Scholar] [CrossRef]
- Koo, J.; Kwac, J.; Ju, W.; Steinert, M.; Leifer, L.; Nass, C. Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. Int. J. Interact. Des. Manuf. 2015, 9, 269–275. [Google Scholar] [CrossRef]
- Alonso, E.; Arpón, C.; González, M.; Fernández, R.Á.; Nieto, M. Economic impact of autonomous vehicles in Spain. Eur. Transp. Res. Rev. 2020, 12, 59. [Google Scholar] [CrossRef]
- Wåseth, H.; Safi, J.; Nielsen, T.; Bayr, U.; Johansen, N.; Fjeldaas, E.; Christensen, T. Embedding sustainability into the design of street lighting. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Stockholm, Sweden, 4–6 December 2023; IOP Publishing: Bristol, UK, 2024; Volume 1320, p. 012016. [Google Scholar]
- Walters, J.G.; Meng, X.; Xu, C.; Jing, H.J.; Marsh, S. Rural positioning challenges for connected and autonomous vehicles. In Proceedings of the 2019 International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 828–842. [Google Scholar]
- Vujić, M.; Gregurić, M.; Dedić, L.; Nečoska, D.K. The Impact of Unconditional Priority for Escorted Vehicles in Traffic Networks on Sustainable Urban Mobility. Sustainability 2024, 16, 151. [Google Scholar] [CrossRef]
- Khan, J.; Wang, L.; Jacobs, E.; Talebian, A.; Santo, C.; Golias, M.; Astorne-figari, C.; Khan, J.; Wang, L.; Jacobs, E.; et al. Smart Cities Connected and Autonomous Vehicles Readiness Index to cite this version: HAL Id: hal-02291446 Smart Cities Connected and Autonomous Vehicles Readiness Index. ACM SCC 2019, 1–8. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S. A technological overview & design considerations for developing electric vehicle charging stations. J. Energy Storage 2021, 43, 103225. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Yin, Y. Optimal deployment of charging lanes for electric vehicles in transportation networks. Transp. Res. Part B Methodol. 2016, 91, 344–365. [Google Scholar] [CrossRef]
- Saad, M.M.; Khan, M.T.R.; Shah, S.H.A.; Kim, D. Advancements in Vehicular Communication Technologies: C-V2X and NR-V2X Comparison. IEEE Commun. Mag. 2021, 59, 107–113. [Google Scholar] [CrossRef]
- Gambelli, M.; Mariani, S.; Cabri, G.; Zambonelli, F. Combining coordination strategies for autonomous vehicles in intersections networks. In International Symposium on Intelligent and Distributed Computing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 147–157. [Google Scholar]
- Anderson, J.; Nidhi, K.; Stanley, K.; Sorensen, P.; Samaras, C.; Oluwatola, O. Autonomous Vehicle Technology: A Guide for Policymakers; RAND Corporation research report series; RR-443-1-RC; RAND Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Gavanas, N. Autonomous Road Vehicles: Challenges for Urban Planning in European Cities. Urban Sci. 2019, 3, 61. [Google Scholar] [CrossRef]
- Pucher, J.; Schausberger, W.; Werneck, T.; Committee of the Regions; Metis GmbH. State of Play of Connected and Automated Driving and Future Challenges and Opportunities for Europe’s Cities and Regions. 2018. Available online: https://op.europa.eu/en/publication-detail/-/publication/82a26577-e70a-11e8-b690-01aa75ed71a1/language-en (accessed on 12 December 2024).
- Kim, T.J. Automated autonomous vehicles: Prospects and impacts on society. J. Transp. Technol. 2018, 8, 137. [Google Scholar] [CrossRef][Green Version]
- Pettigrew, S.; Fritschi, L.; Norman, R. The potential implications of autonomous vehicles in and around the workplace. Int. J. Environ. Res. Public Health 2018, 15, 1876. [Google Scholar] [CrossRef]
- Nikitas, A.; Vitel, A.E.; Cotet, C. Autonomous vehicles and employment: An urban futures revolution or catastrophe? Cities 2021, 114, 103203. [Google Scholar] [CrossRef]
- Fasenfest, D.; Jacobs, J. An Anatomy of Change and Transition: The Automobile Industry of Southeast Michigan. Small Bus. Econ. 2003, 21, 153–172. [Google Scholar] [CrossRef]
- Van Fossen, J.A.; Chang, C.H.; Ford, J.K.; Mack, E.A.; Cotten, S.R. Identifying alternative occupations for truck drivers displaced due to autonomous vehicles by leveraging the O* NET database. Am. Behav. Sci. 2023, 67, 1693–1715. [Google Scholar] [CrossRef]
- Kim, S.; Shrestha, R. Security and Privacy in Intelligent Autonomous Vehicles. In Automotive Cyber Security; Springer: Singapore, 2020; pp. 35–66. [Google Scholar] [CrossRef]
- Xu, X.; Fan, C.K. Autonomous vehicles, risk perceptions and insurance demand: An individual survey in China. Transp. Res. Part A Policy Pract. 2019, 124, 549–556. [Google Scholar] [CrossRef]
- Rojas-Rueda, D.; Nieuwenhuijsen, M.J.; Khreis, H.; Frumkin, H. Autonomous vehicles and public health. Annu. Rev. Public Health 2019, 41, 329–345. [Google Scholar] [CrossRef]
- Ciatto, G.; Schumacher, M.I.; Omicini, A.; Calvaresi, D. Agent-Based Explanations in AI: Towards an Abstract Framework; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; Volume 12175 LNAI, pp. 3–20. [Google Scholar] [CrossRef]
- Guidotti, R.; Monreale, A.; Pedreschi, D.; Giannotti, F. Principles of Explainable Artificial Intelligence. In Explainable AI Within the Digital Transformation and Cyber Physical Systems; Springer: Berlin/Heidelberg, Germany, 2021; pp. 9–31. [Google Scholar] [CrossRef]
- Goodman, B. A Step Towards Accountable Algorithms?: Algorithmic Discrimination and the European Union General Data Protection. In Proceedings of the 29th Conference on Neural Information Processing Systems (NIPS 2016), Barcelona, Spain, 5–10 December 2016. [Google Scholar]
- MacCarthy, M. An Examination of the Algorithmic Accountability Act of 2019. SSRN Electron. J. 2020, 1–10. [Google Scholar] [CrossRef]
- Lazányi, K. Perceived Risks of Autonomous Vehicles. Risks 2023, 11, 26. [Google Scholar] [CrossRef]
- Chah, B.; Lombard, A.; Bkakria, A.; Yaich, R.; Abbas-Turki, A.; Galland, S. Privacy Threat Analysis for connected and autonomous vehicles. Procedia Comput. Sci. 2022, 210, 36–44. [Google Scholar] [CrossRef]
- Wuyts, K.; Scandariato, R.; Joosen, W. LIND (D) UN Privacy Threat Tree Catalog; Department of Computer Science, KU: Leuven, Belgium, 2014. [Google Scholar]
- Safa, N.S.; Mitchell, F.; Maple, C.; Azad, M.A.; Dabbagh, M. Privacy Enhancing Technologies (PETs) for connected vehicles in smart cities. Trans. Emerg. Telecommun. Technol. 2022, 33, e4173. [Google Scholar] [CrossRef]
- Shabanpour, R.; Shamshiripour, A.; Mohammadian, A. Modeling adoption timing of autonomous vehicles: Innovation diffusion approach. Transportation 2018, 45, 1607–1621. [Google Scholar] [CrossRef]
- Bissell, D.; Birtchnell, T.; Elliott, A.; Hsu, E.L. Autonomous automobilities: The social impacts of driverless vehicles. Curr. Sociol. 2020, 68, 116–134. [Google Scholar] [CrossRef]
- Sparrow, R.; Howard, M. Make way for the wealthy? Autonomous vehicles, markets in mobility, and social justice. Mobilities 2020, 15, 514–526. [Google Scholar] [CrossRef]
- Liu, H.Y. Irresponsibilities, inequalities and injustice for autonomous vehicles. Ethics Inf. Technol. 2017, 19, 193–207. [Google Scholar] [CrossRef]
- Eppenberger, N.; Richter, M.A. The opportunity of shared autonomous vehicles to improve spatial equity in accessibility and socio-economic developments in European urban areas. Eur. Transp. Res. Rev. 2021, 13, 32. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated Vehicles, On-Demand Mobility, and Environmental Impacts. Curr. Sustain. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Brown, A.; Gonder, J.; Repac, B. An Analysis of Possible Energy Impacts of Automated Vehicles. In Road Vehicle Automation; Springer: Berlin/Heidelberg, Germany, 2014; pp. 137–153. [Google Scholar] [CrossRef]
- Nechyba, T.J.; Walsh, R.P. Urban sprawl. J. Econ. Perspect. 2004, 18, 177–200. [Google Scholar] [CrossRef]
- Dubljević, V.; Douglas, S.; Milojevich, J.; Ajmeri, N.; Bauer, W.A.; List, G.; Singh, M.P. Moral and social ramifications of autonomous vehicles: A qualitative study of the perceptions of professional drivers. Behav. Inf. Technol. 2023, 42, 1271–1278. [Google Scholar] [CrossRef]
- Giacomin, J. What is human centred design? Des. J. 2014, 17, 606–623. [Google Scholar] [CrossRef]
- Giacomin, J. Humans and Autonomous Vehicles; Routledge: London, UK, 2022. [Google Scholar]
- Samsani, S.S.; Muhammad, M.S. Socially compliant robot navigation in crowded environment by human behavior resemblance using deep reinforcement learning. IEEE Robot. Autom. Lett. 2021, 6, 5223–5230. [Google Scholar] [CrossRef]
- Cha, K. Affective Scenarios in Automotive Design: A Human-Centred Approach Towards Understanding of Emotional Experience. Ph.D. Thesis, Brunel University London, Uxbridge, UK, 2019. [Google Scholar]
- Silva, Ó.; Cordera, R.; González-González, E.; Nogués, S. Environmental impacts of autonomous vehicles: A review of the scientific literature. Sci. Total Environ. 2022, 830, 154615. [Google Scholar] [CrossRef]
- Hannappel, R. The impact of global warming on the automotive industry. AIP Conf. Proc. 2017, 1871, 060001. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Nazzal, M.A.; Darras, B.M.; Deiab, I.M. Global warming potential, water footprint, and energy demand of shared autonomous electric vehicles incorporating circular economy practices. Sustain. Prod. Consum. 2023, 36, 449–462. [Google Scholar] [CrossRef]
- Acar, C.; Dincer, I. The potential role of hydrogen as a sustainable transportation fuel to combat global warming. Int. J. Hydrogen Energy 2020, 45, 3396–3406. [Google Scholar] [CrossRef]
- Lim, L.; Tawfik, A.M. Estimating Future Travel Costs for Autonomous Vehicles (AVs) and Shared Autonomous Vehicles (SAVs). In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, Maui, HI, USA, 4–7 November 2018; pp. 1702–1707. [Google Scholar] [CrossRef]
- Schaller, B. Can sharing a ride make for less traffic? Evidence from Uber and Lyft and implications for cities. Transp. Policy 2021, 102, 1–10. [Google Scholar] [CrossRef]
- Yang, Z.; Huang, H.; Lin, F. Sustainable Electric Vehicle Batteries for a Sustainable World: Perspectives on Battery Cathodes, Environment, Supply Chain, Manufacturing, Life Cycle, and Policy. Adv. Energy Mater. 2022, 12, 2200383. [Google Scholar] [CrossRef]
- Xia, X.; Li, P. A review of the life cycle assessment of electric vehicles: Considering the influence of batteries. Sci. Total Environ. 2022, 814, 152870. [Google Scholar] [CrossRef]
- Liang, J.; Feng, J.; Fang, Z.; Lu, Y.; Yin, G.; Mao, X.; Wu, J.; Wang, F. An Energy-Oriented Torque-Vector Control Framework for Distributed Drive Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 4014–4031. [Google Scholar] [CrossRef]
- Nangia, V.; Patil, S.; Chigurupati, A.; Lassar, N. Convex optimization of durability testing profiles for autonomous vehicles. In Proceedings of the Annual Reliability and Maintainability Symposium, Tucson, AZ, USA, 25–28 January 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Zeng, W.; Zhang, Y.; Tao, D.; Li, G.; Qu, X. What drives people to use automated vehicles? A meta-analytic review. Accid. Anal. Prev. 2021, 159, 106270. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, T.; Ma, L. Human acceptance of autonomous vehicles: Research status and prospects. Int. J. Ind. Ergon. 2023, 95, 103458. [Google Scholar] [CrossRef]
- Rahman, M.M.; Thill, J.C. Impacts of connected and autonomous vehicles on urban transportation and environment: A comprehensive review. Sustain. Cities Soc. 2023, 96, 104649. [Google Scholar] [CrossRef]
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).