


Transfer Function-Based Road Classification for Vehicles with Nonlinear Semi-Active Suspension




Abstract
:1. Introduction
2. Materials and Methods
2.1. Vehicle Modeling
2.1.1. Governing Equations of the Half-Car Model
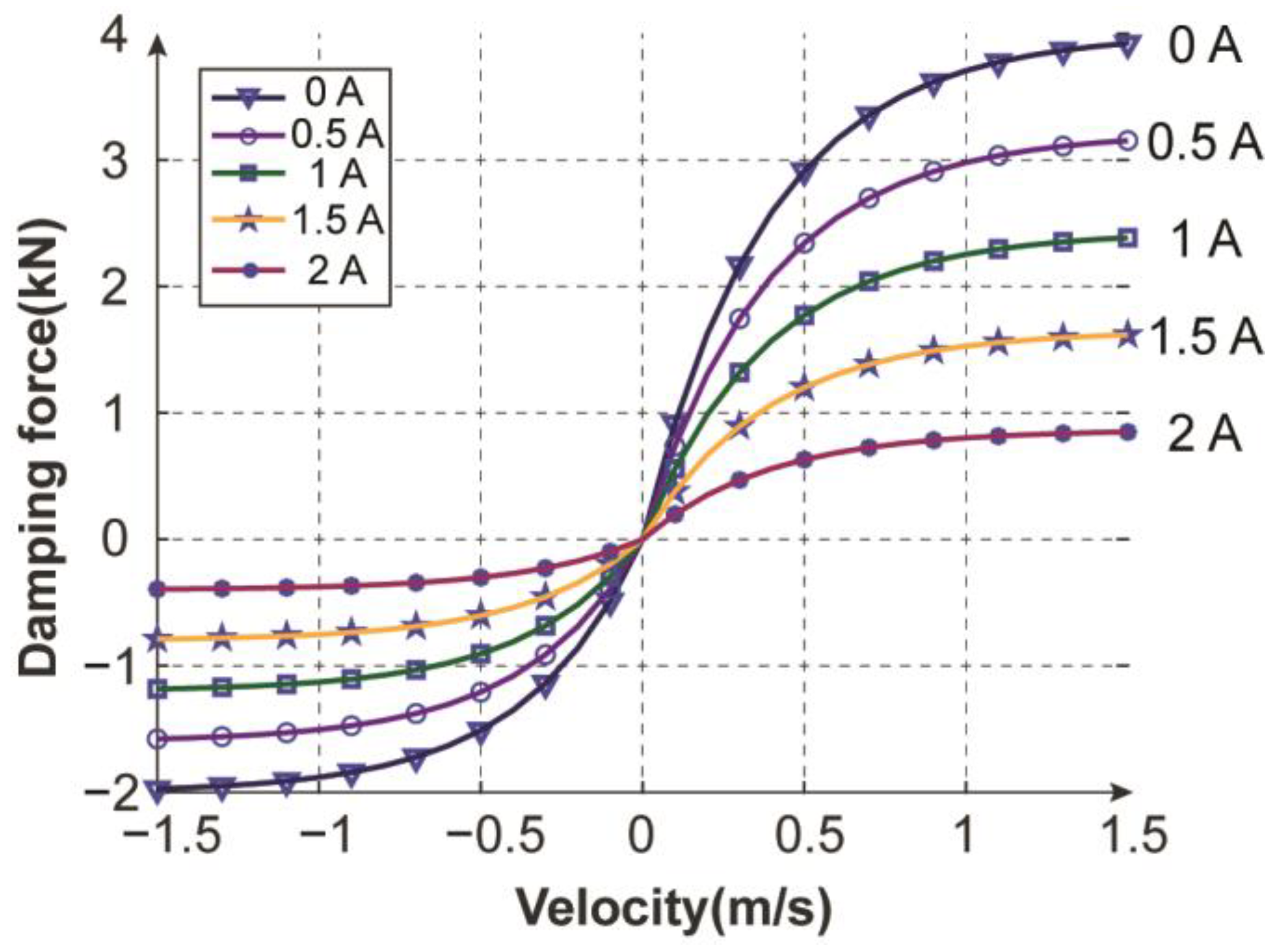
2.1.2. Nonlinear Damping Characteristic Curve
2.1.3. Nonlinear Spring Model
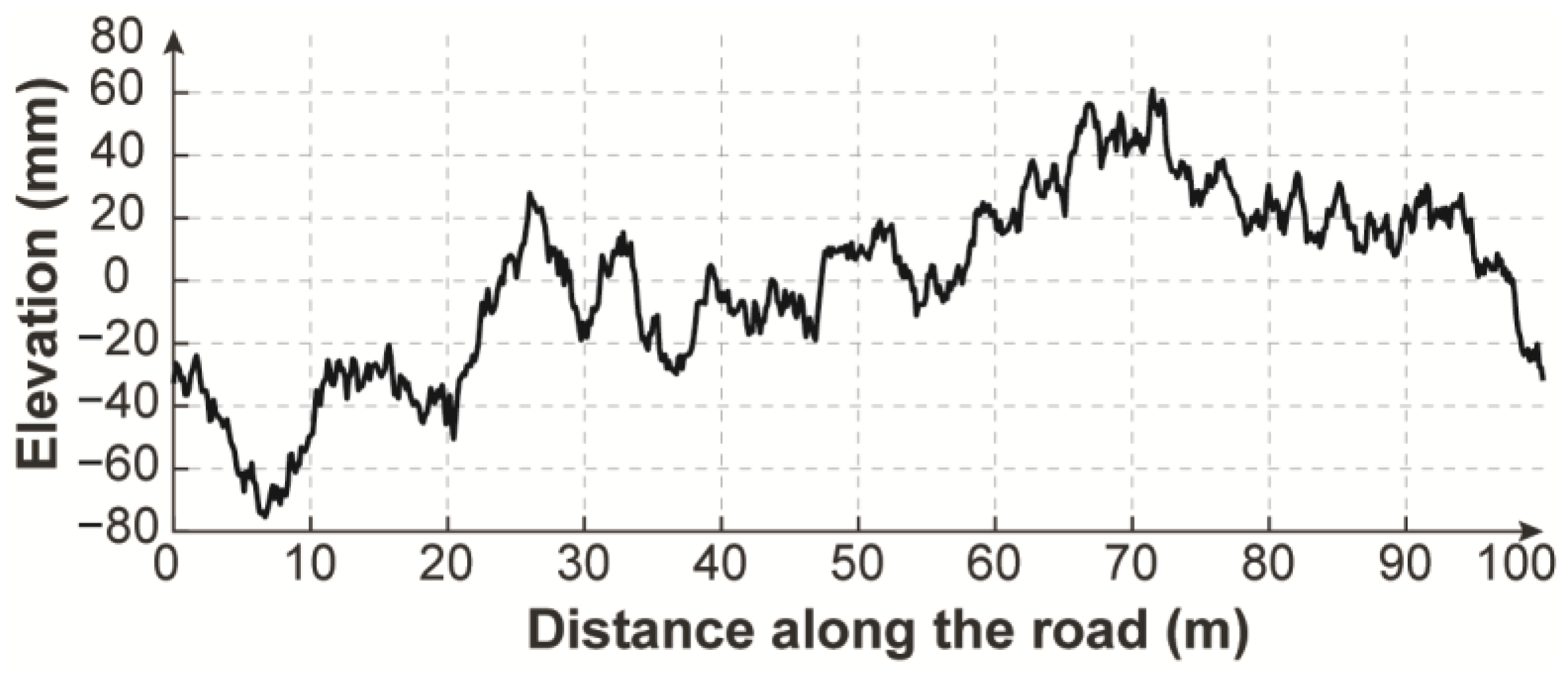
2.2. Road Profile Generation
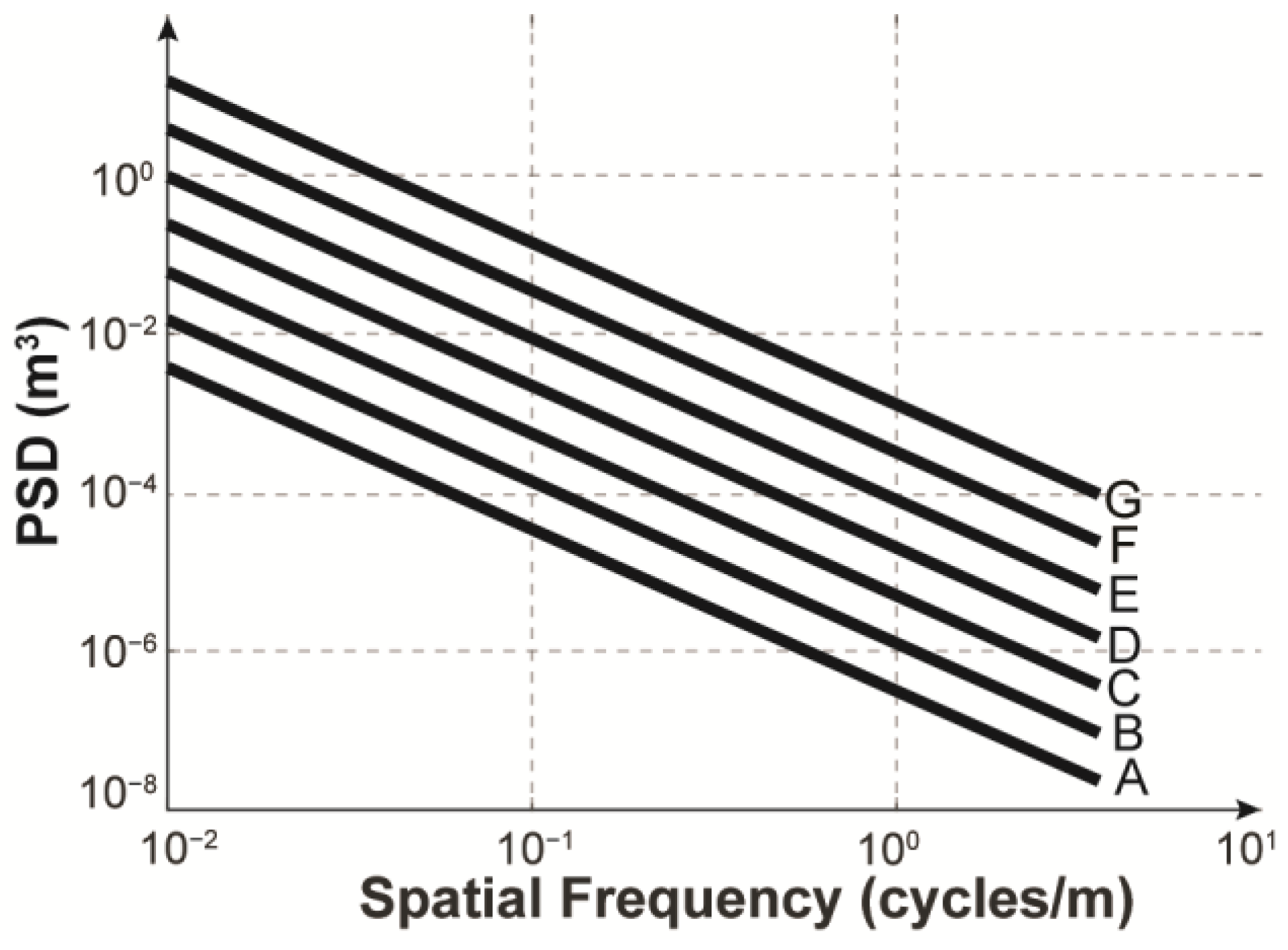
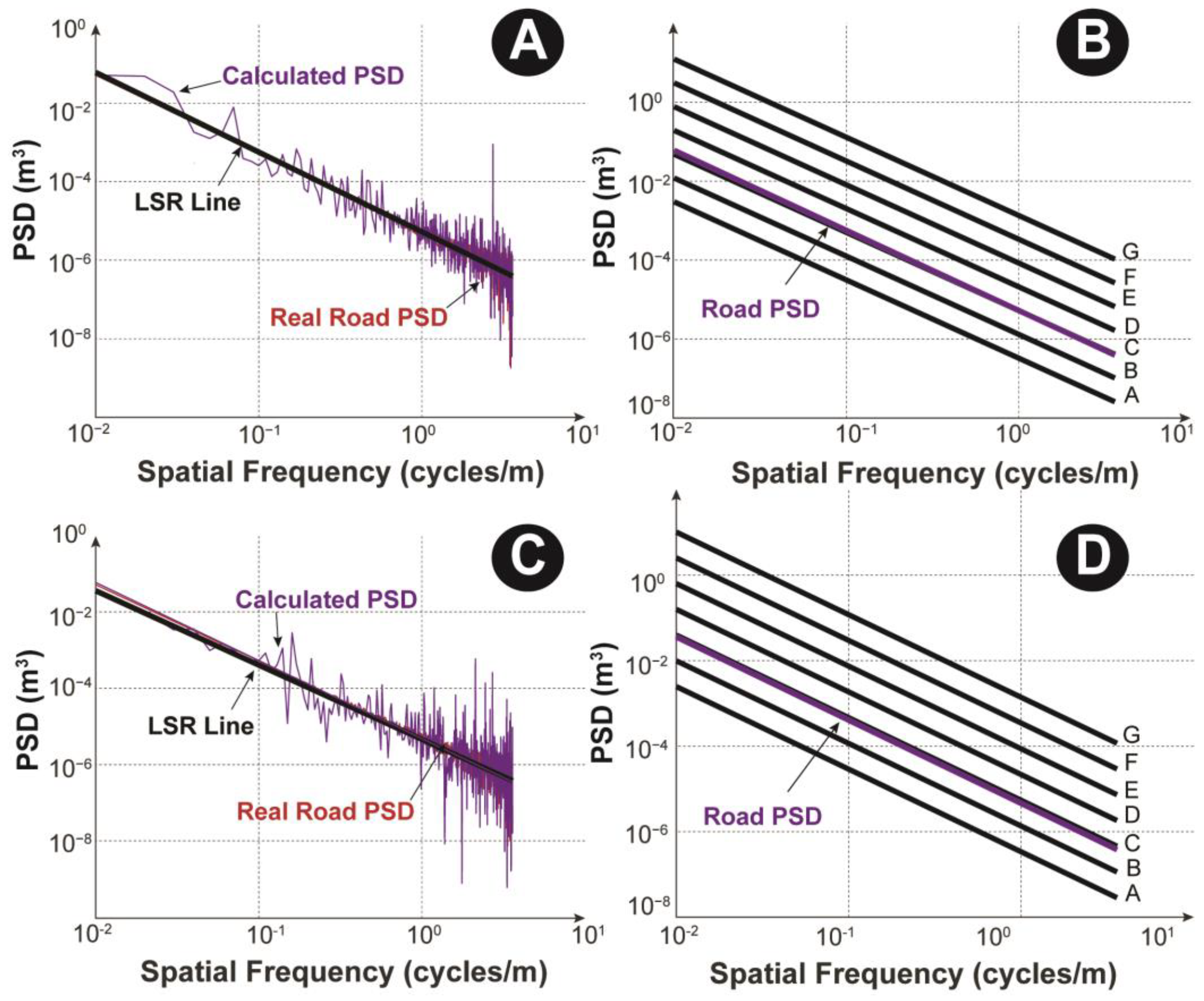
2.3. Calculating the PSD of the Road
2.4. Road Classification Algorithm
2.5. Hybrid Control
2.5.1. Skyhook Control
2.5.2. Groundhook Control
2.5.3. Hybrid Control
2.5.4. Design of the Parameter
3. Results and Discussions
Robustness Analysis of the Road Classifier
- Road classification is investigated for the following two cases of accelerometer location: 1-on the vehicle axle; 2-on the vehicle body center of mass (P1)
- Three percentages of 0%, +15% and +30% are considered for the uncertainty levels of vehicle body mass and moment of inertia.
- Three percentages of 0%, ±20% and ±40% are considered for the uncertainty levels of vehicle tire stiffness.
- Two standard deviations, and , are considered for the accelerometer noise levels.
- The classification error index is the cost function value given in Equation (15).
- The road level C and hybrid controller with are considered for robustness analysis (note that the transfer function does not depend on the road level and only depends on the vehicle model [11]).
- Finally, the road classification algorithm (15) gives the estimated road level automatically.
4. Conclusions
- -
- Using system identification methods to obtain an accurate vehicle model to be used for obtaining an accurate transfer function;
- -
- The authors would like to conduct experiments with a real sample in their future work;
- -
- Considering the full 3D vehicle model and the multi-physical magic formula of tires model in the proposed road classifier;
- -
- In this paper, the classification method is robust against typical uncertainties. However, fewer cases with rare and unusual uncertainties lead to misclassification. To face high-level and unusual uncertainties, a new road classification algorithm should be proposed, as the development of the current classifier may lead to higher computational burden and complexity.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Strandemar, K. On Objective Measures for Ride Comfort Evaluation; KTH: Stockholm, Sweden, 2005. [Google Scholar]
- Qin, Y.; Xiang, C.; Wang, Z.; Dong, M. Road excitation classification for semi-active suspension system based on system response. J. Vib. Control 2018, 24, 2732–2748. [Google Scholar] [CrossRef]
- Tudón-Martínez, J.C.; Fergani, S.; Sename, O.; Martinez, J.J.; Morales-Menendez, R.; Dugard, L. Adaptive road profile estimation in semiactive car suspensions. IEEE Trans. Control Syst. Technol. 2015, 23, 2293–2305. [Google Scholar] [CrossRef]
- Qin, Y.; Dong, M.; Zhao, F.; Langari, R.; Gu, L. Road profile classification for vehicle semi-active suspension system based on adaptive neuro-fuzzy inference system. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 1533–1538. [Google Scholar]
- Doumiati, M.; Victorino, A.; Charara, A.; Lechner, D. Estimation of road profile for vehicle dynamics motion: Experimental validation. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 5237–5242. [Google Scholar]
- Yu, W.; Zhang, X.; Guo, K.; Karimi, H.R.; Ma, F.; Zheng, F. Adaptive real-time estimation on road disturbances properties considering load variation via vehicle vertical dynamics. Math. Probl. Eng. 2013, 2013, 283528. [Google Scholar] [CrossRef]
- Doumiati, M.; Erhart, S.; Martinez, J.; Sename, O.; Dugard, L. Adaptive control scheme for road profile estimation: Application to vehicle dynamics. IFAC Proc. Vol. 2014, 47, 8445–8450. [Google Scholar] [CrossRef]
- Sun, J.; Dong, M.; Qin, Y.; Gu, L. Control Research of Nonlinear Vehicle Suspension System Based on Road Estimation; SAE Technical Paper; Published April 03, 2018 by SAE International in United States; Sector:Automotive; Event:WCX World Congress Experience; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018; ISSN 0148-7191. [Google Scholar] [CrossRef]
- Soliman, A.; Kaldas, M. Semi-active suspension systems from research to mass-market—A review. J. Low Freq. Noise Vib. Act. Control 2021, 40, 1005–1023. [Google Scholar] [CrossRef]
- Hu, F. Development of a Direct Type Road Roughness Evaluation System. Master’s Thesis, University of South Florida, Tampa, FL, USA, 2004. [Google Scholar]
- González, A.; O’brien, E.J.; Li, Y.-Y.; Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. Veh. Syst. Dyn. 2008, 46, 483–499. [Google Scholar] [CrossRef]
- Keenahan, J.; Ren, Y.; OBrien, E.J. Determination of road profile using multiple passing vehicle measurements. Struct. Infrastruct. Eng. 2020, 16, 1262–1275. [Google Scholar] [CrossRef]
- Xu, C.; Xie, F.; Zhou, R.; Huang, X.; Cheng, W.; Tian, Z.; Li, Z. Vibration analysis and control of semi-active suspension system based on continuous damping control shock absorber. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 341. [Google Scholar] [CrossRef]
- Qin, Y.; Langari, R.; Wang, Z.; Xiang, C.; Dong, M. Road excitation classification for semi-active suspension system with deep neural networks. J. Intell. Fuzzy Syst. 2017, 33, 1907–1918. [Google Scholar] [CrossRef]
- Dong, J.-F.; Han, S.-Y.; Zhou, J.; Chen, Y.-H.; Zhong, X.-F. FNT-Based Road Profile Classification in Vehicle Semi-Active Suspension System. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 1392–1397. [Google Scholar]
- Wang, Z.; Xu, S.; Li, F.; Wang, X.; Yang, J.; Miao, J. Integrated Model Predictive Control and Adaptive Unscented Kalman Filter for Semi-Active Suspension System Based on Road Classification; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2020; ISSN 0148-7191. [Google Scholar]
- Liu, W.; Wang, R.; Ding, R.; Meng, X.; Yang, L. On-line estimation of road profile in semi-active suspension based on unsprung mass acceleration. Mech. Syst. Signal Process. 2020, 135, 106370. [Google Scholar] [CrossRef]
- Ngwangwa, H.M.; Heyns, P.S.; Labuschagne, F.; Kululanga, G.K. Reconstruction of road defects and road roughness classification using vehicle responses with artificial neural networks simulation. J. Terramechanics 2010, 47, 97–111. [Google Scholar] [CrossRef]
- Wang, Z.; Qin, Y.; Gu, L.; Dong, M. Vehicle system state estimation based on adaptive unscented Kalman filtering combing with road classification. IEEE Access 2017, 5, 27786–27799. [Google Scholar] [CrossRef]
- Wang, Z.; Dong, M.; Qin, Y.; Du, Y.; Zhao, F.; Gu, L. Suspension system state estimation using adaptive Kalman filtering based on road classification. Veh. Syst. Dyn. 2017, 55, 371–398. [Google Scholar] [CrossRef]
- Yousefzadeh, M.; Azadi, S.; Soltani, A. Road profile estimation using neural network algorithm. J. Mech. Sci. Technol. 2010, 24, 743–754. [Google Scholar] [CrossRef]
- Qin, Y.; Wei, C.; Tang, X.; Zhang, N.; Dong, M.; Hu, C. A novel nonlinear road profile classification approach for controllable suspension system: Simulation and experimental validation. Mech. Syst. Signal Process. 2019, 125, 79–98. [Google Scholar] [CrossRef]
- Qin, Y.; Rath, J.J.; Hu, C.; Sentouh, C.; Wang, R. Adaptive nonlinear active suspension control based on a robust road classifier with a modified super-twisting algorithm. Nonlinear Dyn. 2019, 97, 2425–2442. [Google Scholar] [CrossRef]
- Qin, Y.; Yuan, K.; Huang, Y.; Tang, X.; Wang, Z.; Dong, M. Road Classification Based on System Response with Consideration of Tire Enveloping; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018; ISSN 0148-7191. [Google Scholar]
- Gorges, C.; Öztürk, K.; Liebich, R. Road classification for two-wheeled vehicles. Veh. Syst. Dyn. 2018, 56, 1289–1314. [Google Scholar] [CrossRef]
- Ding, Z.; Zhao, F.; Qin, Y.; Tan, C. Adaptive neural network control for semi-active vehicle suspensions. J. Vibroengineering 2017, 19, 2654–2669. [Google Scholar] [CrossRef]
- ISO 8608; Technical Committee ISO/TC, Mechanical Vibration, Shock. Subcommittee SC2 Measurement; Evaluation of Mechanical Vibration, Shock as Applied to Machines. In Mechanical Vibration—Road Surface Profiles—Reporting of Measured Data. International Organization for Standardization: Geneva, Switzerland, 1995.
- Rozyn, M.; Zhang, N. A method for estimation of vehicle inertial parameters. Veh. Syst. Dyn. 2010, 48, 547–565. [Google Scholar] [CrossRef]
- Fundowicz, P.; Sar, H. Estimation of mass moments of inertia of automobile. In Proceedings of the 2018 XI International Science-Technical Conference Automotive Safety, Casta, Papiernicka, 18–20 April 2018; pp. 1–6. [Google Scholar]
- Hanafi, D. PID controller design for semi-active car suspension based on model from intelligent system identification. In Proceedings of the 2010 Second International Conference on Computer Engineering and Applications, Washington, DC, USA, 19–21 March 2010; pp. 60–63. [Google Scholar]
- Barbaro, M.; Genovese, A.; Timpone, F.; Sakhnevych, A. Extension of the multiphysical magic formula tire model for ride comfort applications. Nonlinear Dyn. 2024, 112, 4183–4208. [Google Scholar] [CrossRef]
- Kilicaslan, S. Control of active suspension system in the presence of nonlinear spring and damper. Sci. Iran. 2022, 29, 1221–1235. [Google Scholar]
- Qin, Y.; Dong, M.; Langari, R.; Gu, L.; Guan, J. Adaptive hybrid control of vehicle semiactive suspension based on road profile estimation. Shock Vib. 2015, 2015, 636739. [Google Scholar]
- Lalanne, C. Random Vibration; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Hoboken, NJ, USA, 2022. [Google Scholar]
- Sankaranarayanan, V.; Emekli, M.E.; Gilvenc, B.; Guvenc, L.; Ozturk, E.; Ersolmaz, E.; Eyol, I.E.; Sinal, M. Semiactive suspension control of a light commercial vehicle. IEEE/ASME Trans. Mechatron. 2008, 13, 598–604. [Google Scholar] [CrossRef]
- Turnip, A.; Panggabean, J.H. Hybrid controller design based magneto-rheological damper lookup table for quarter car suspension. Int. J. Artif. Intell 2020, 18, 193–206. [Google Scholar]
- Nguyen, D.N.; Nguyen, T.A. A novel hybrid control algorithm sliding mode-PID for the active suspension system with state multivariable. Complexity 2022, 2022, 9527384. [Google Scholar] [CrossRef]
- Goel, R.; Maini, R. Improved multi-ant-colony algorithm for solving multi-objective vehicle routing problems. Sci. Iran. 2021, 28, 3412–3428. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Symbol | Value |
|---|---|---|---|
| 650 | 4002.75 | ||
| 42 | −1567.91 | ||
| 42 | −2002.45 | ||
| 1.44 | 801.58 | ||
| 0.96 | 3.41 | ||
| 750 | 1.31 | ||
| 190,000 | 9.48 | ||
| 16,000 | 3.38 | ||
| 0.1 |
| Road Level | ||
|---|---|---|
| A | 0.111 | 0.0377 |
| B | 0.111 | 0.0754 |
| C | 0.111 | 0.151 |
| D | 0.111 | 0.302 |
| E | 0.111 | 0.603 |
| F | 0.111 | 1.206 |
| G | 0.111 | 2.413 |
| H | 0.111 | 4.825 |
| Road Level | β = 0 | β = 0.3 | β = 0.6 | β = 0.8 | β = 1 |
|---|---|---|---|---|---|
| A | 1.5 | 1.2 | 1.8 | 2.2 | 2.5 |
| B | 2 | 2 | 1.7 | 2 | 3 |
| C | 4 | 3.2 | 3 | 3.5 | 4.5 |
| D | 8 | 7 | 7 | 15 | 8 |
| E | 13 | 14 | 13 | 20 | 20 |
| F | 25 | 25 | 30 | 40 | 40 |
| No. Simulation | Passive | Hybrid | Passive | Hybrid |
|---|---|---|---|---|
| 1 | 0.99 | 0.72 | 1.23 | 0.93 |
| 2 | 0.98 | 0.74 | 0.95 | 0.8 |
| 3 | 1 | 0.69 | 0.95 | 0.8 |
| 4 | 1.02 | 0.75 | 1.14 | 0.93 |
| 5 | 1.07 | 0.79 | 1.17 | 0.87 |
| Uncertainty of Body Mass Properties | Uncertainty of Tire Stiffness | (m/s2) | Estimated Road Level | Classifier Error | |
|---|---|---|---|---|---|
| +30% | ±40% | 0.05 | D (failed) | 14.1 | 1. |
| 0.2 | D (failed) | 14.4 | 2. | ||
| ±20% | 0.05 | C | 3.1 | 3. | |
| 0.2 | C | 3.71 | 4. | ||
| 0% | 0.05 | C | 0.8 | 5. | |
| 0.2 | C | 1.59 | 6. | ||
| +15% | ±40% | 0.05 | B (failed) | 13 | 7. |
| 0.2 | B (failed) | 13.5 | 8. | ||
| ±20% | 0.05 | C | 2.2 | 9. | |
| 0.2 | C | 2.56 | 10. | ||
| 0% | 0.05 | C | 0.62 | 11. | |
| 0.2 | C | 0.83 | 12. | ||
| 0% | ±40% | 0.05 | C | 9.91 | 13. |
| 0.2 | C | 10.2 | 14. | ||
| ±20% | 0.05 | C | 2.04 | 15. | |
| 0.2 | C | 2.17 | 16. | ||
| 0% | 0.05 | C | 0.45 | 17. | |
| 0.2 | C | 0.54 | 18. |
| Uncertainty of Body Mass Properties | Uncertainty of Tire Stiffness | (m/s2) | Estimated Road Level | Classifier Error | |
|---|---|---|---|---|---|
| +30% | ±40% | 0.05 | C | 9.05 | 1. |
| 0.2 | B (failed) | 44.56 | 2. | ||
| ±20% | 0.05 | C | 5.12 | 3. | |
| 0.2 | B (failed) | 38.80 | 4. | ||
| 0% | 0.05 | C | 3.91 | 5. | |
| 0.2 | C | 26.94 | 6. | ||
| +15% | ±40% | 0.05 | C | 6.48 | 7. |
| 0.2 | D (failed) | 22.44 | 8. | ||
| ±20% | 0.05 | C | 4.83 | 9. | |
| 0.2 | B (failed) | 17.85 | 10. | ||
| 0% | 0.05 | C | 1.65 | 11. | |
| 0.2 | C | 14.74 | 12. | ||
| 0% | ±40% | 0.05 | C | 2.42 | 13. |
| 0.2 | C | 13.17 | 14. | ||
| ±20% | 0.05 | C | 2.21 | 15. | |
| 0.2 | C | 11.08 | 16. | ||
| 0% | 0.05 | C | 1.36 | 17. | |
| 0.2 | C | 8.02 | 18. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouhi, H.; Ghalami, M.; Norouzzadeh, A.; Ahmadi, A. Transfer Function-Based Road Classification for Vehicles with Nonlinear Semi-Active Suspension. World Electr. Veh. J. 2024, 15, 143. https://doi.org/10.3390/wevj15040143
Kouhi H, Ghalami M, Norouzzadeh A, Ahmadi A. Transfer Function-Based Road Classification for Vehicles with Nonlinear Semi-Active Suspension. World Electric Vehicle Journal. 2024; 15(4):143. https://doi.org/10.3390/wevj15040143
Chicago/Turabian StyleKouhi, Hamed, Mehran Ghalami, Amir Norouzzadeh, and Amirmasoud Ahmadi. 2024. "Transfer Function-Based Road Classification for Vehicles with Nonlinear Semi-Active Suspension" World Electric Vehicle Journal 15, no. 4: 143. https://doi.org/10.3390/wevj15040143
APA StyleKouhi, H., Ghalami, M., Norouzzadeh, A., & Ahmadi, A. (2024). Transfer Function-Based Road Classification for Vehicles with Nonlinear Semi-Active Suspension. World Electric Vehicle Journal, 15(4), 143. https://doi.org/10.3390/wevj15040143