
Research on a Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm for Three-Dimensional UAV Trajectory Path Planning

Abstract
1. Introduction
2. Methods
2.1. Sand Cat Swarm Optimization (SCSO) Algorithm
2.1.1. Population Initialization
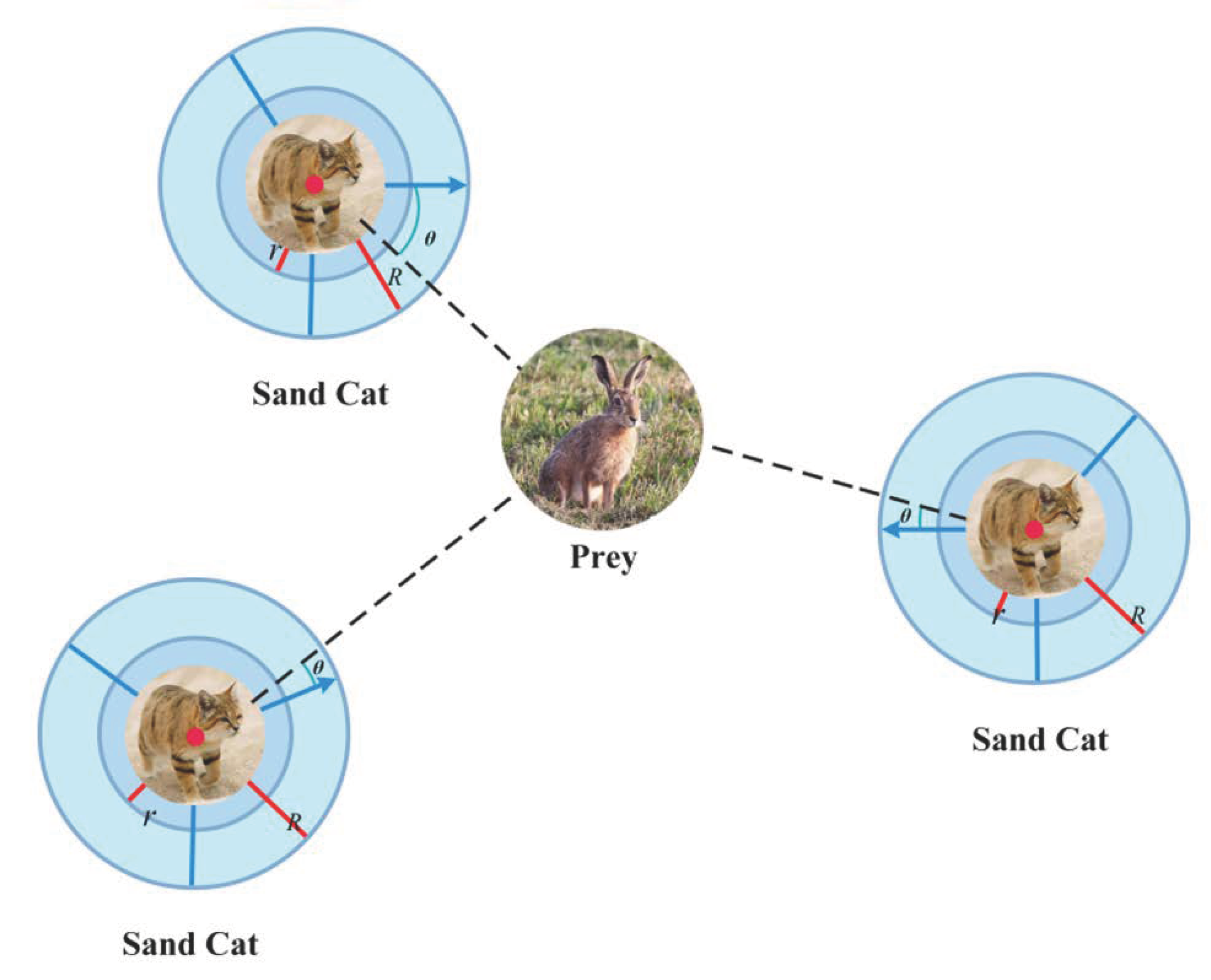
2.1.2. Search for Prey (Detect)
2.1.3. Hunting for Prey (Development)
2.1.4. Search and Attack Choice
2.2. Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm (MISCSO)
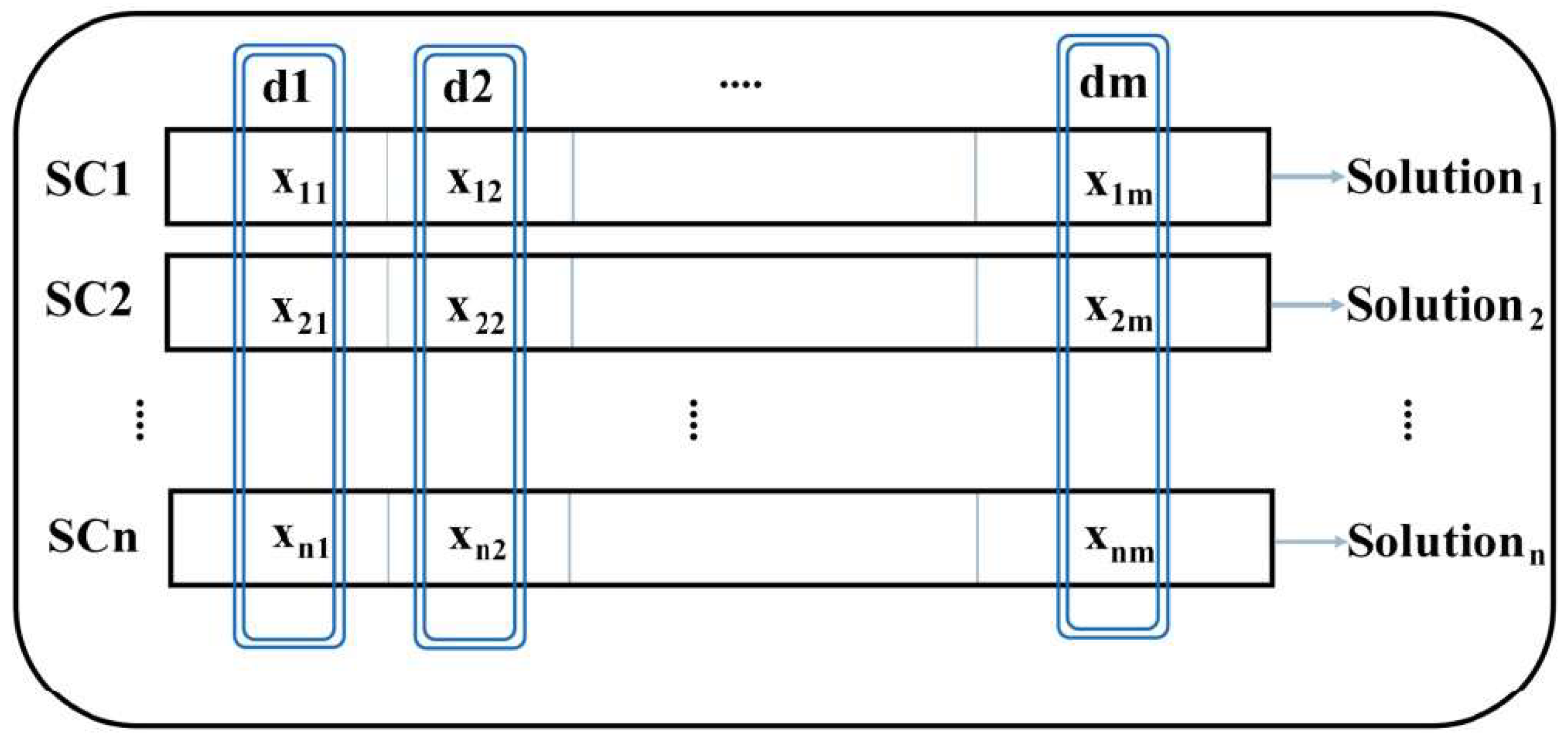
2.2.1. Multi-Population Strategy
2.2.2. Distribution Estimation Learning Strategy
2.2.3. Elite Pool Strategy
2.2.4. Cauchy Perturbation Strategy
2.2.5. Time Complexity
- (1)
- The initialization parameter has a time complexity of O (1).
- (2)
- The initialization of population positions has a time complexity of O (N × D).
- (3)
- Sand cat predation has a time complexity of O (T × N × D).
- (4)
- The position update based on the distribution estimation learning strategy has a time complexity of O (T × N × D).
- (5)
- The cost of function computation includes the algorithm computation time O (T × N × C), elite pool strategy calculation time O (T × N × C), and distribution estimation learning strategy calculation time O (T × N × C), summing up to O (3 × T × N × C).
2.3. Mathematical Model for UAV Path Planning
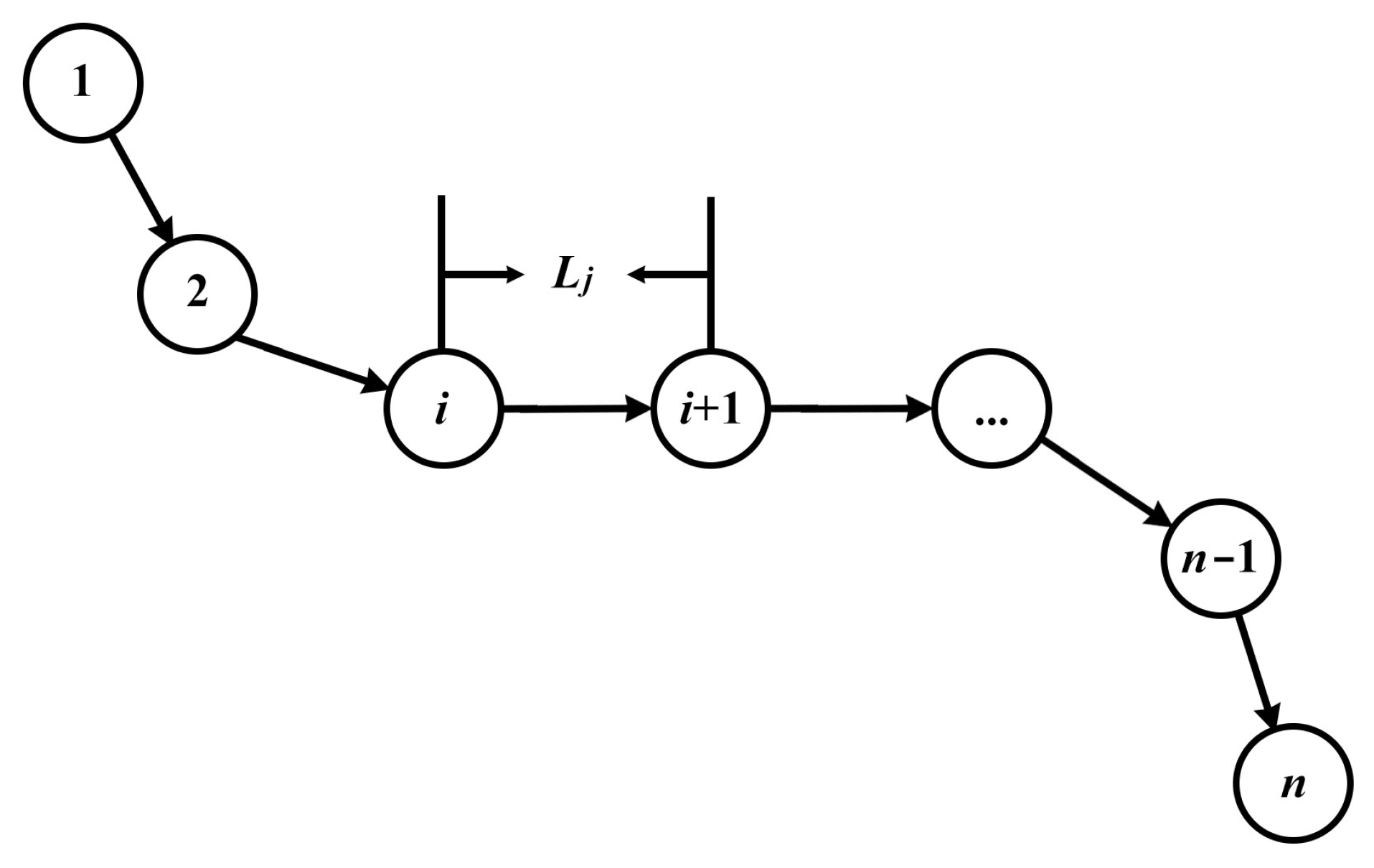
2.3.1. Path Cost
2.3.2. Threat Cost
2.3.3. Altitude Cost
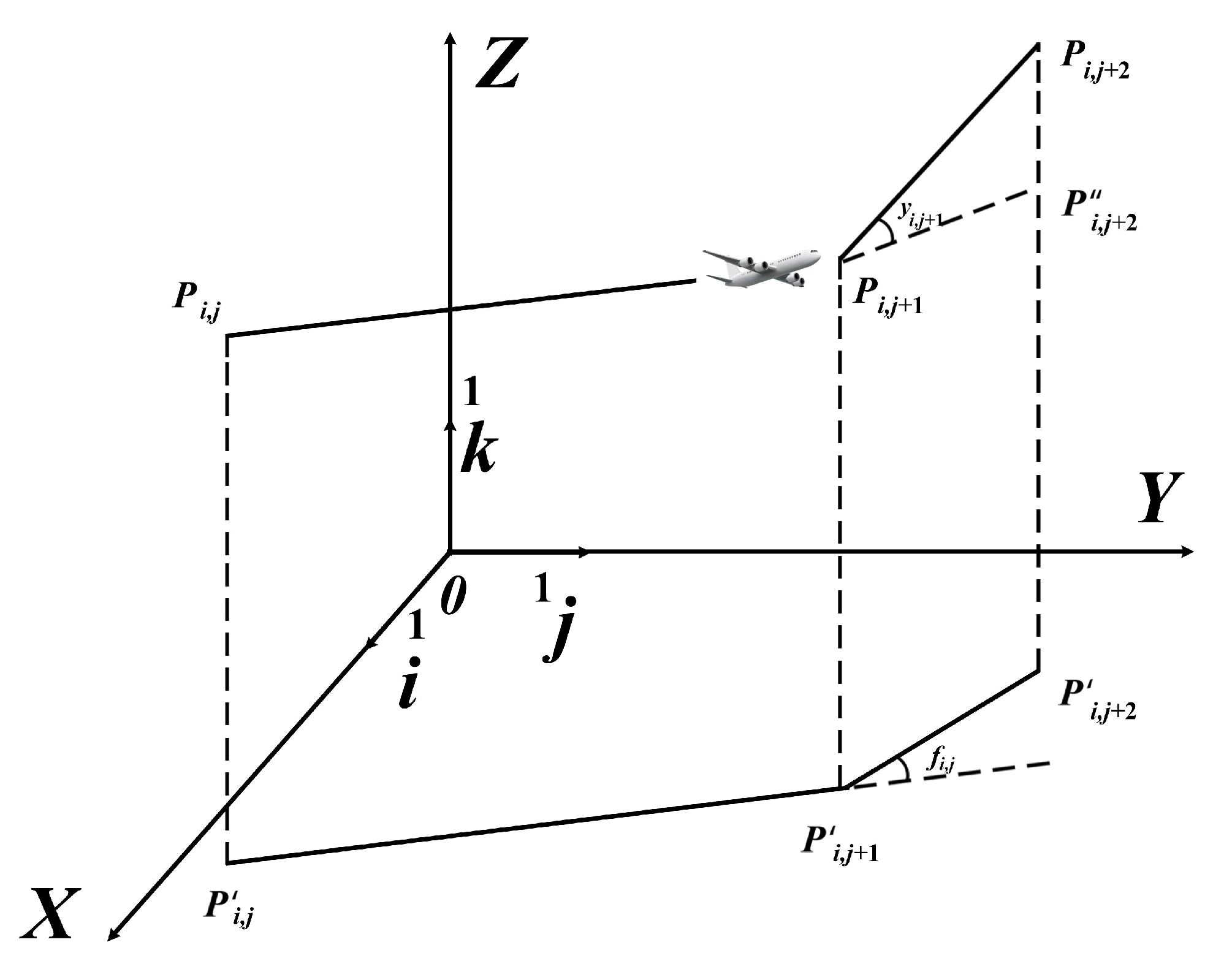
2.3.4. Smoothness Cost
2.3.5. Total Cost
3. Results and Discussion
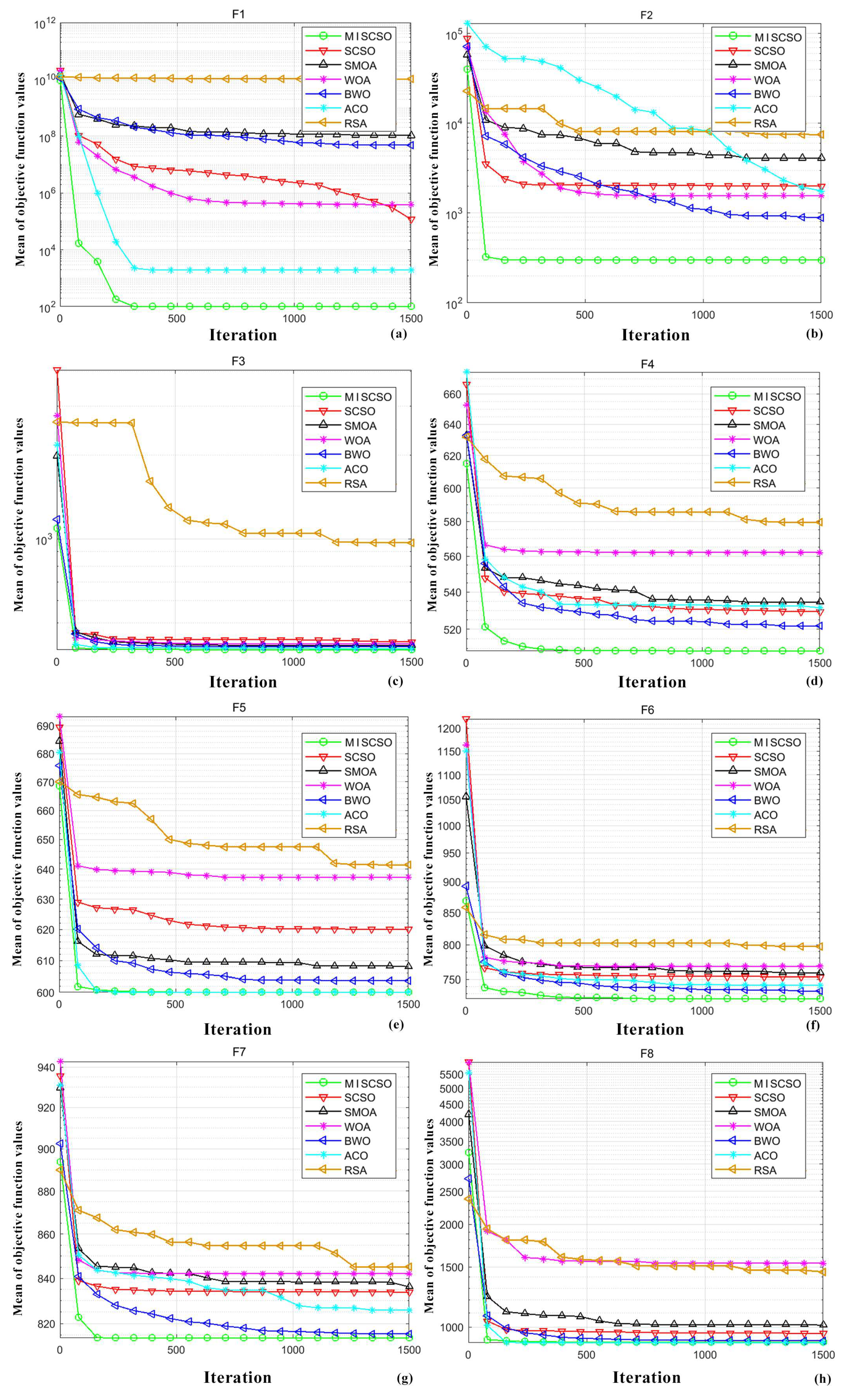
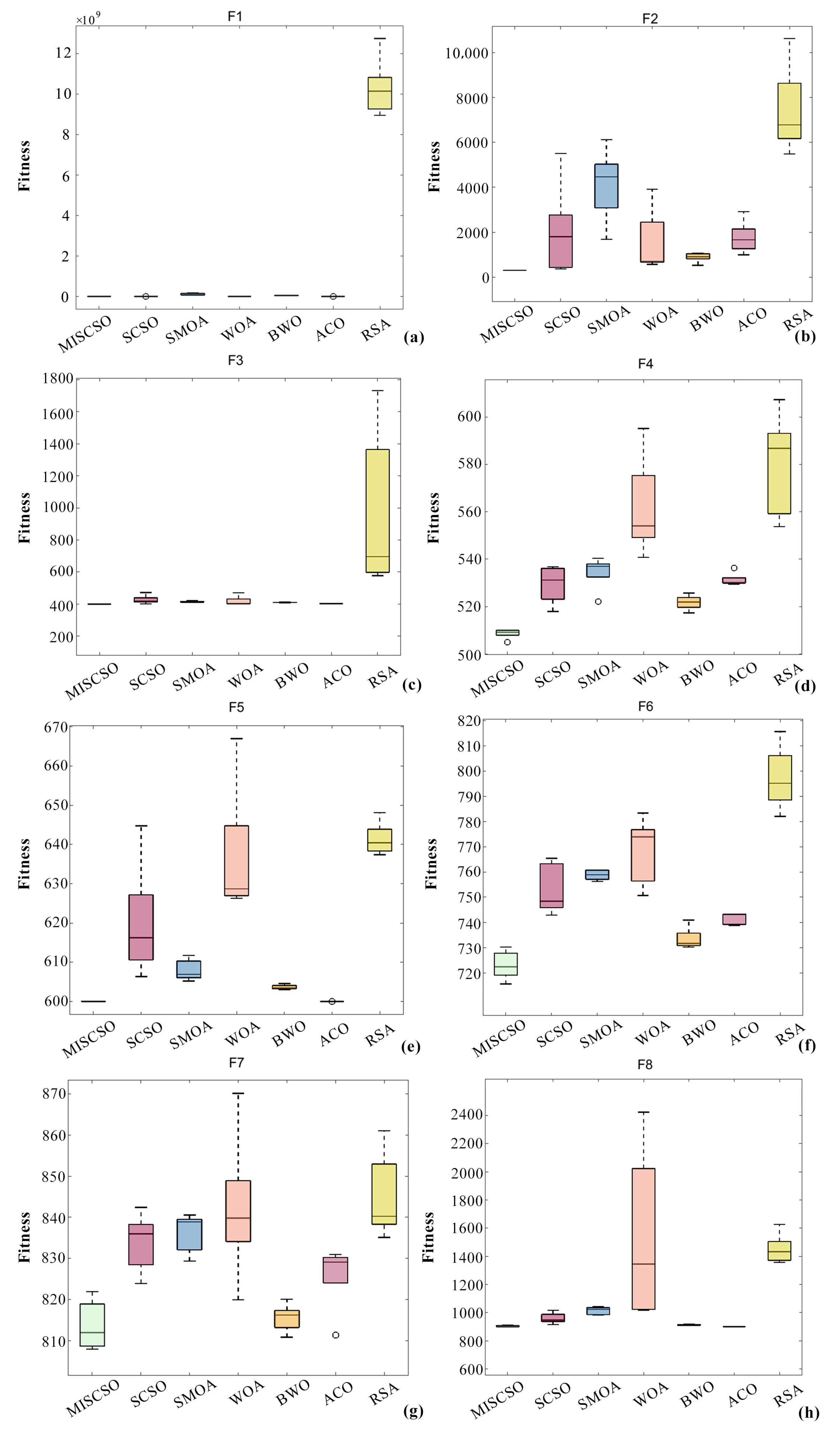
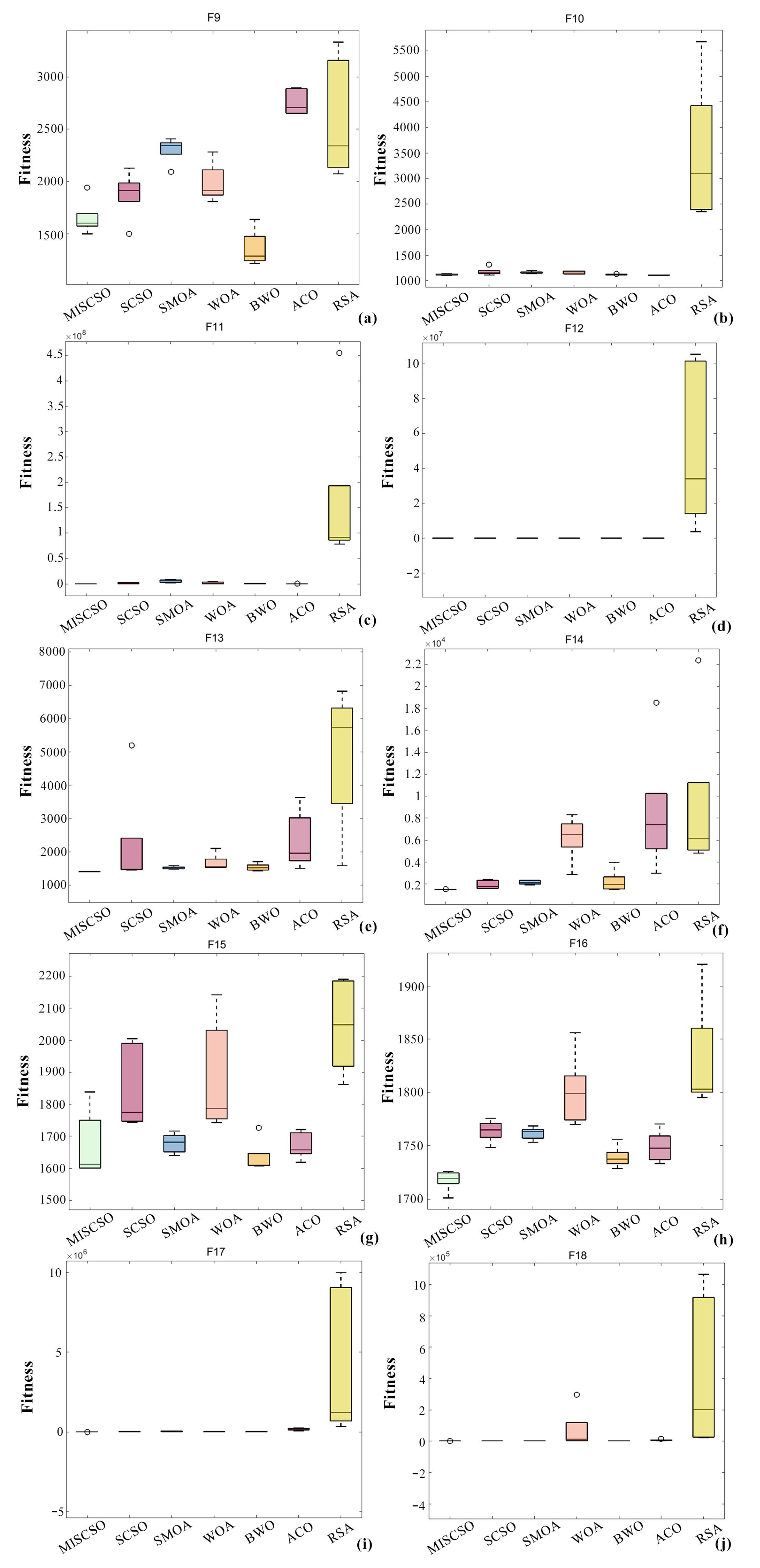
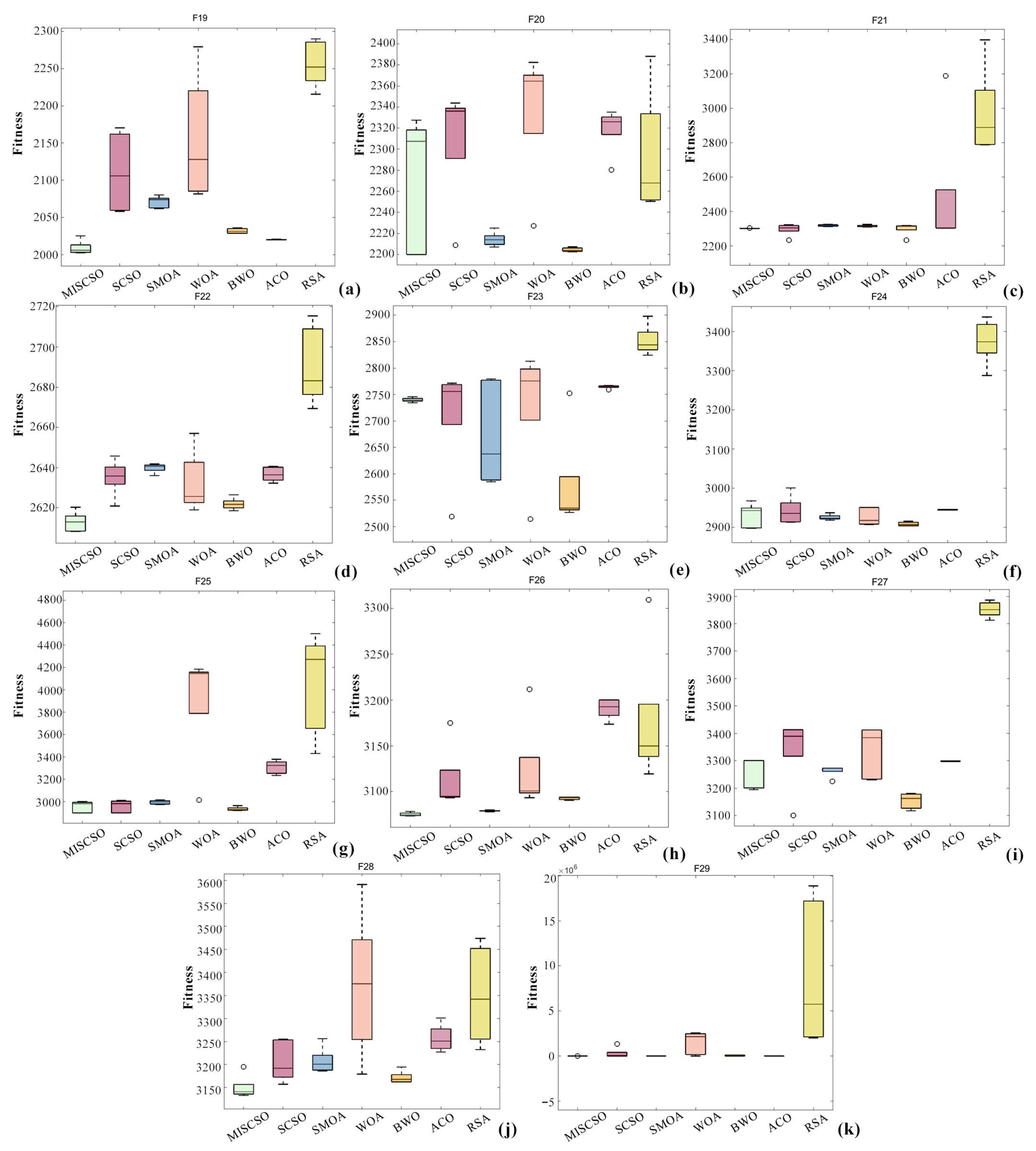
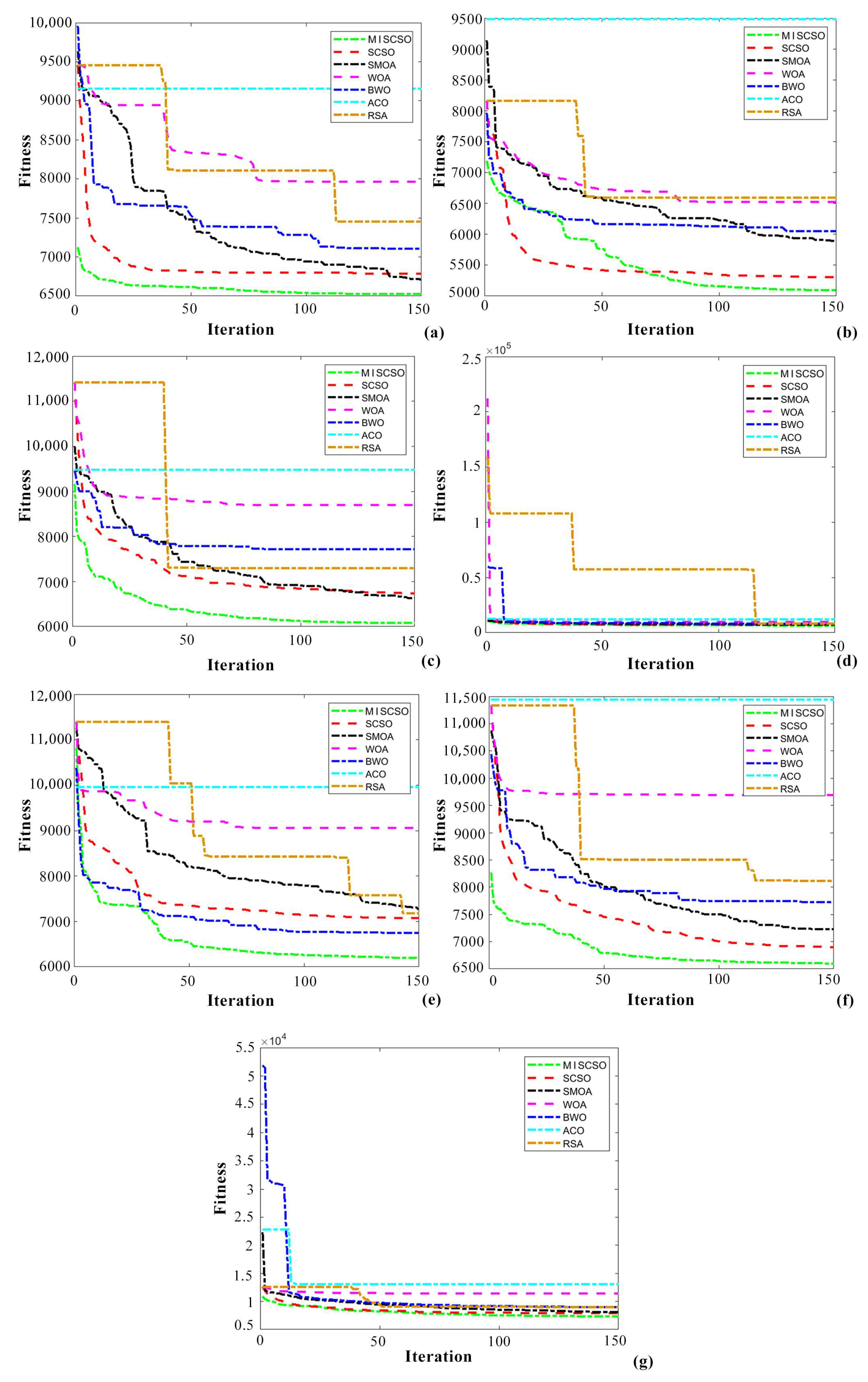
3.1. MISCSO Algorithm Evaluation
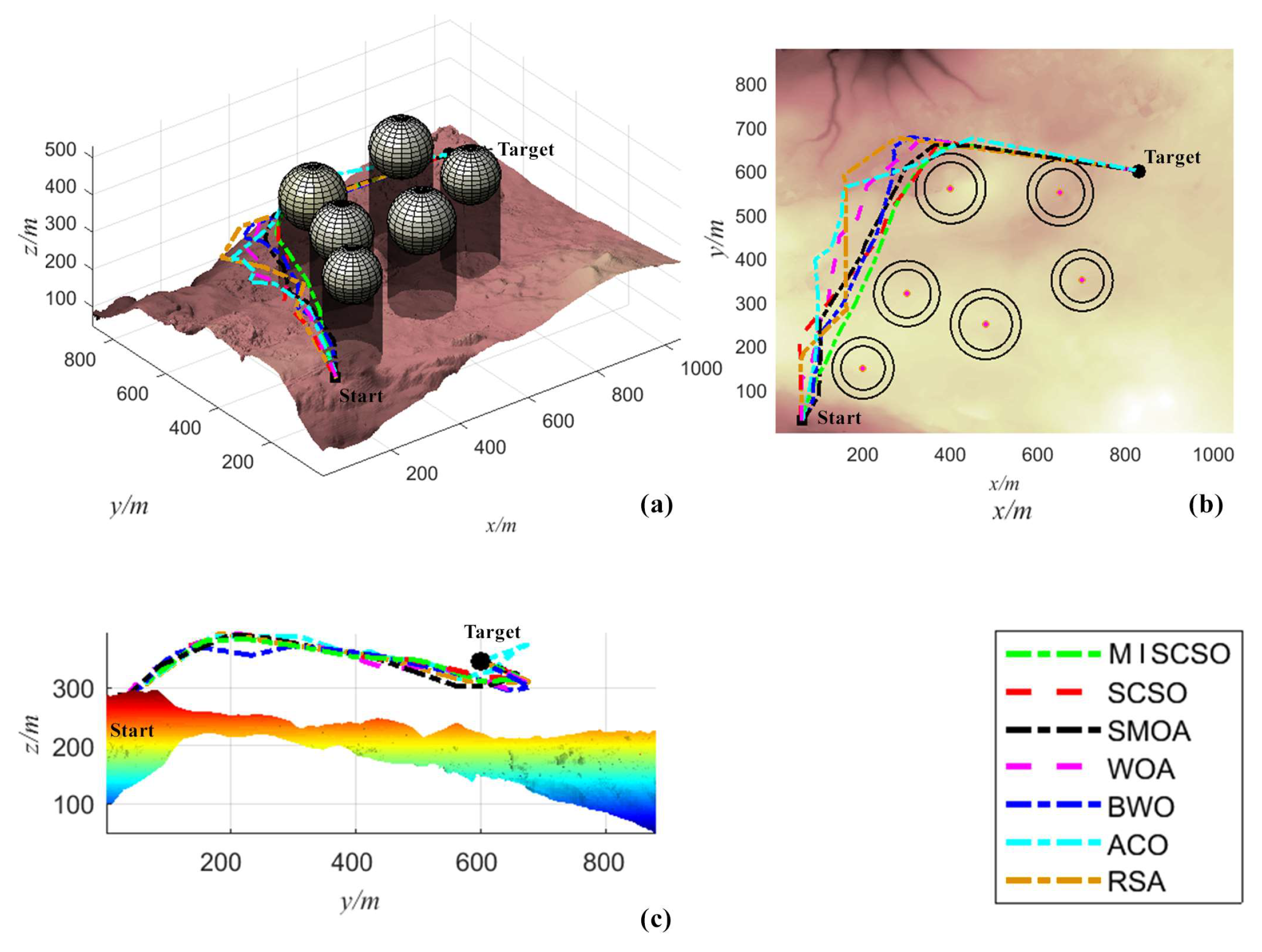
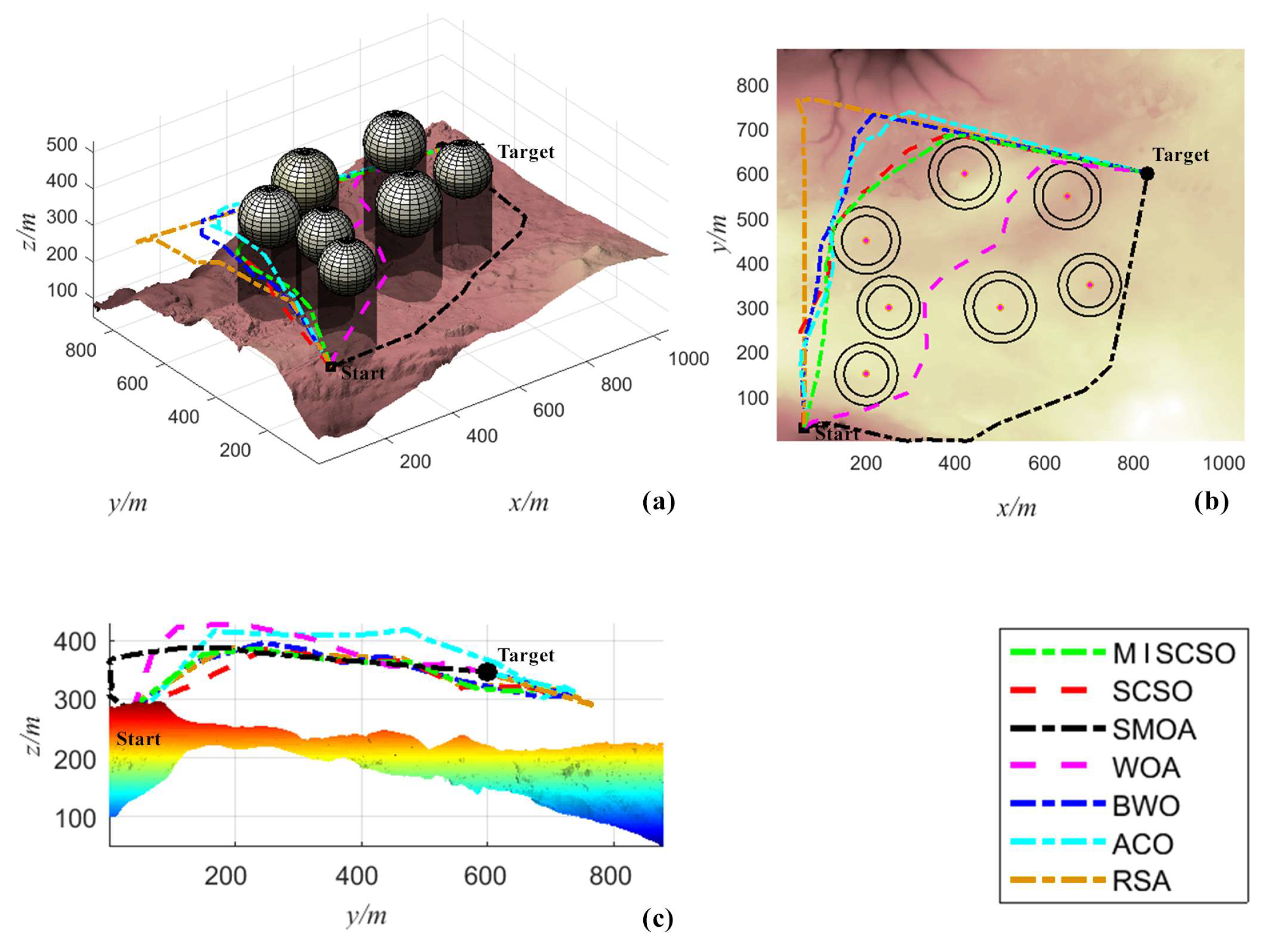
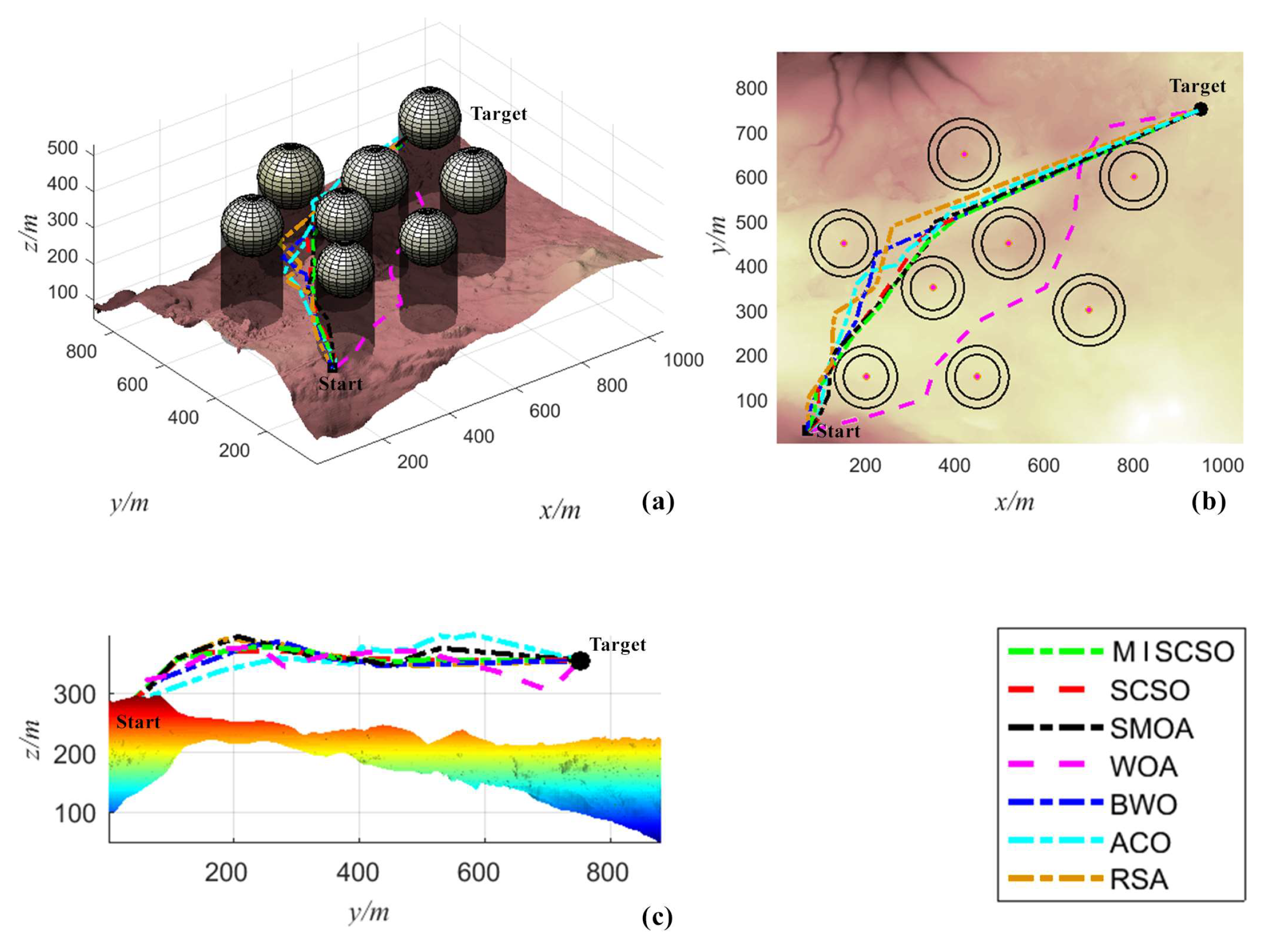
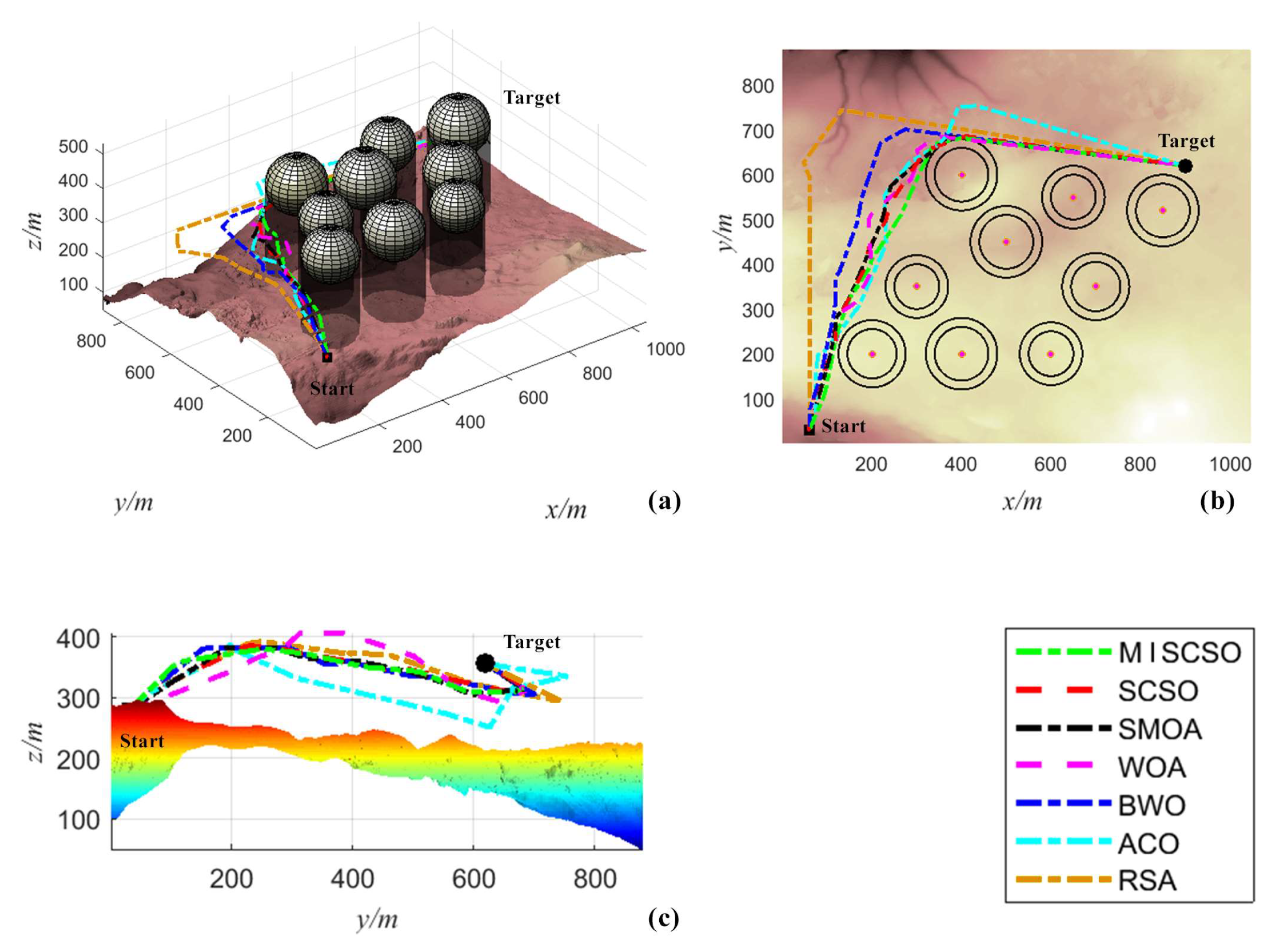
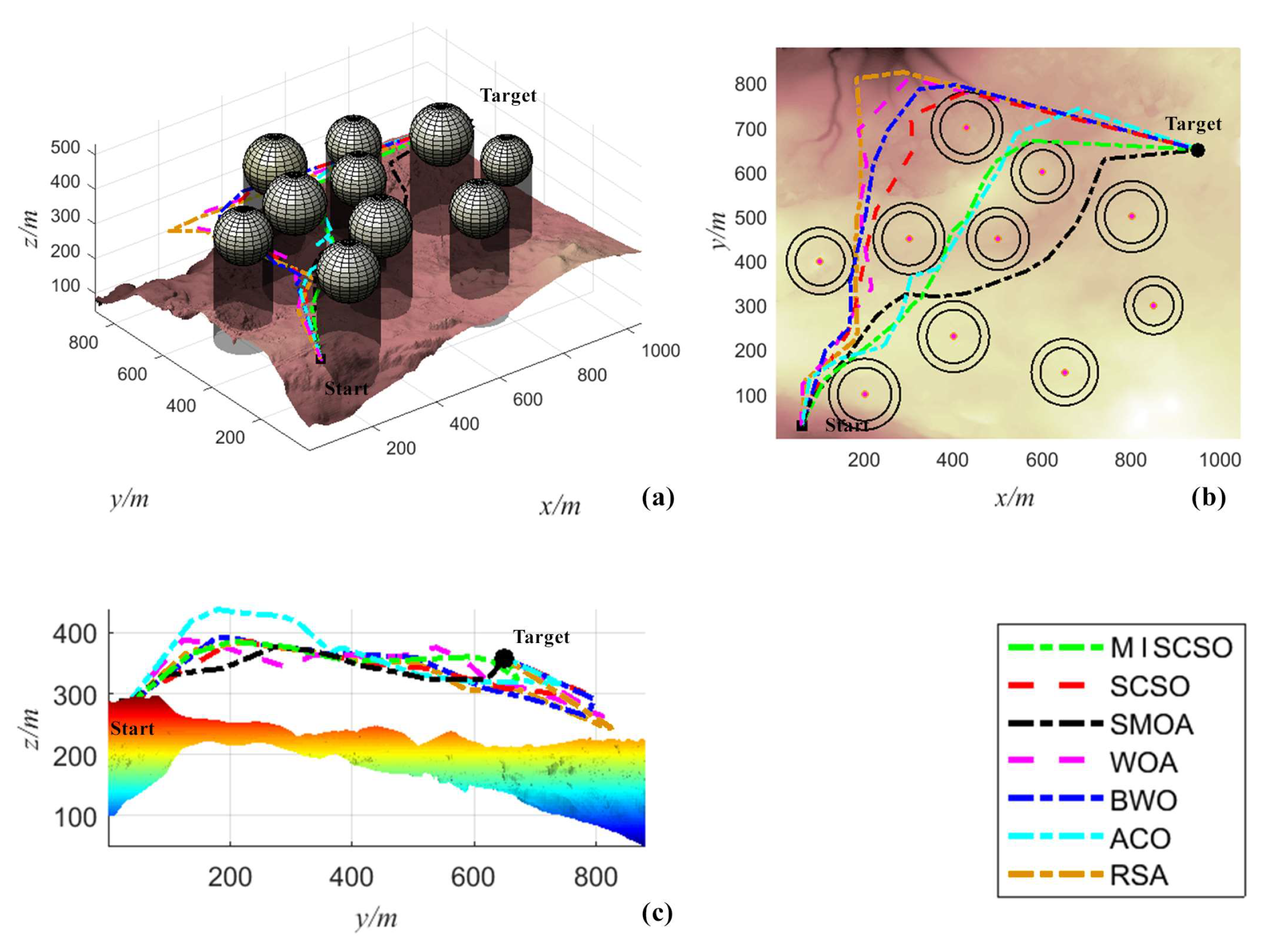
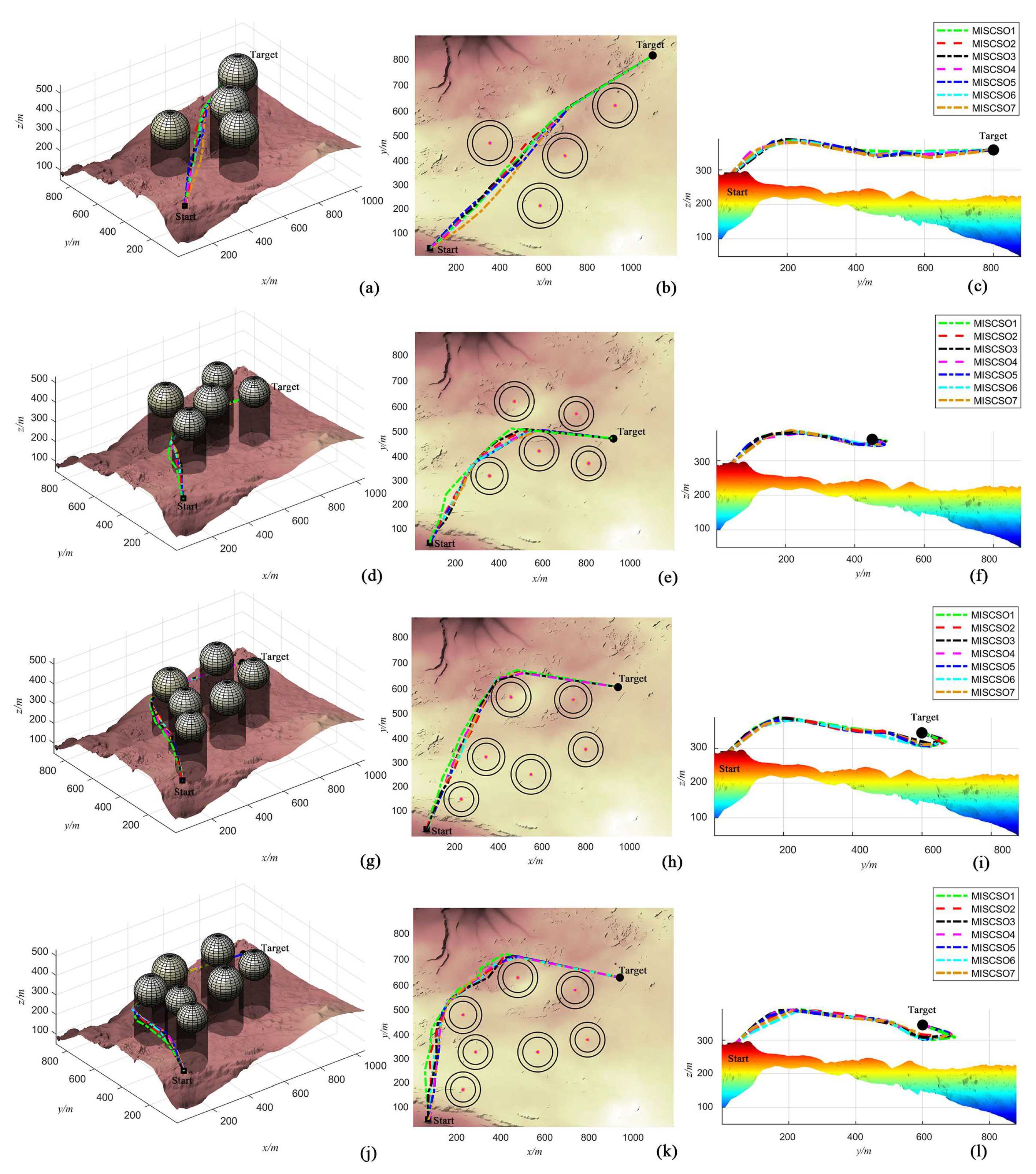
3.2. UAV Three-Dimensional Path Planning
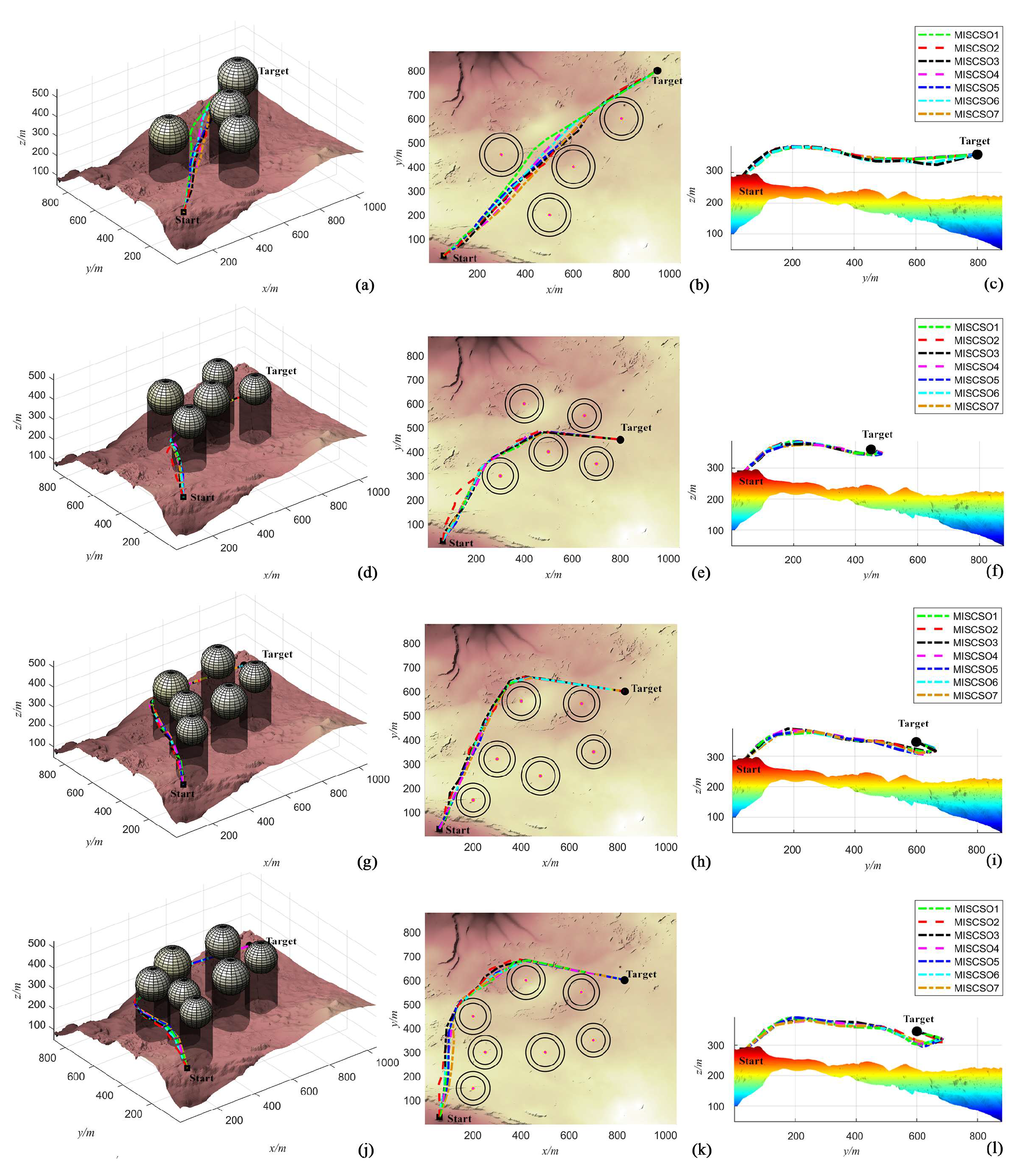
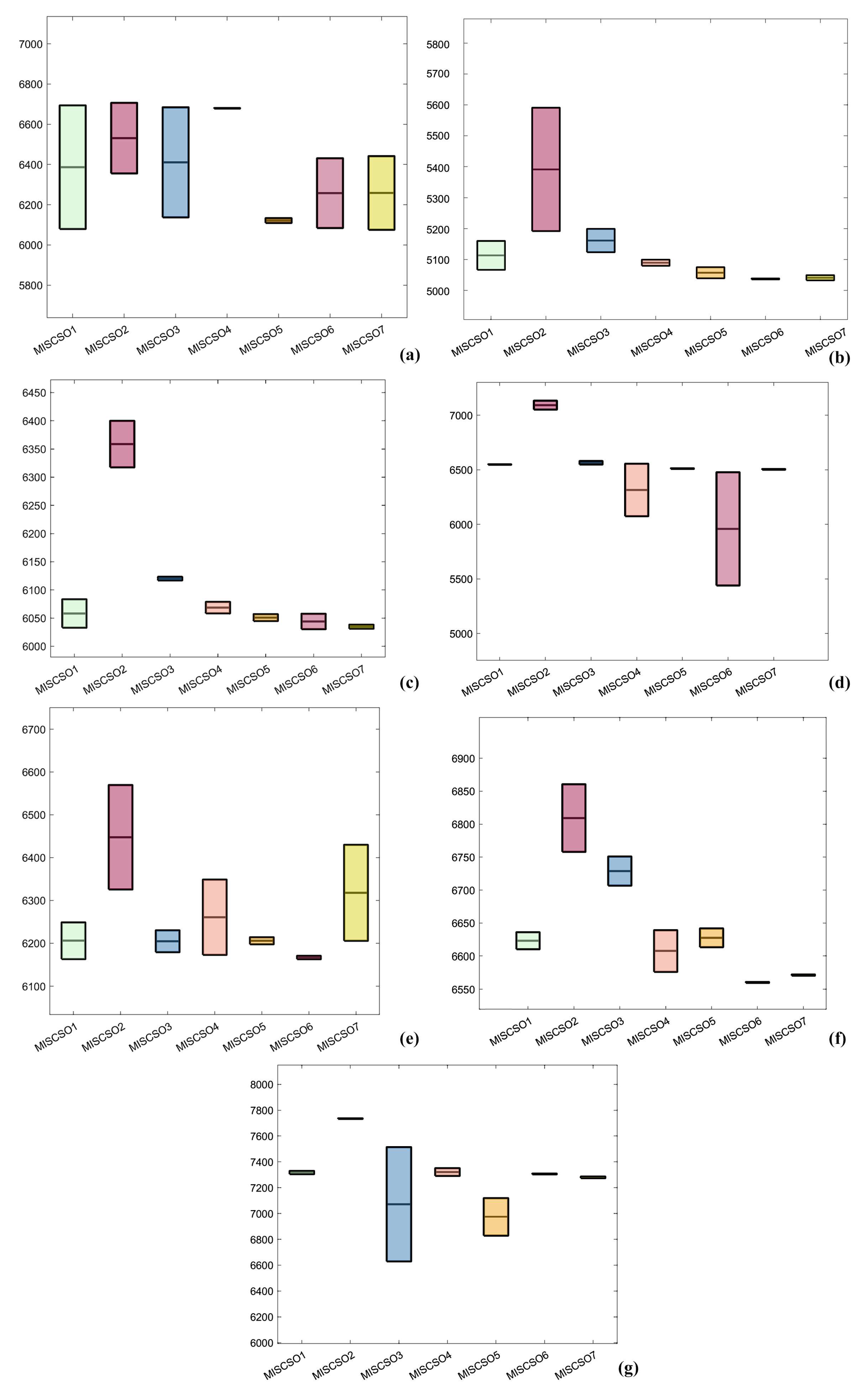
3.2.1. Population Size (Pop)
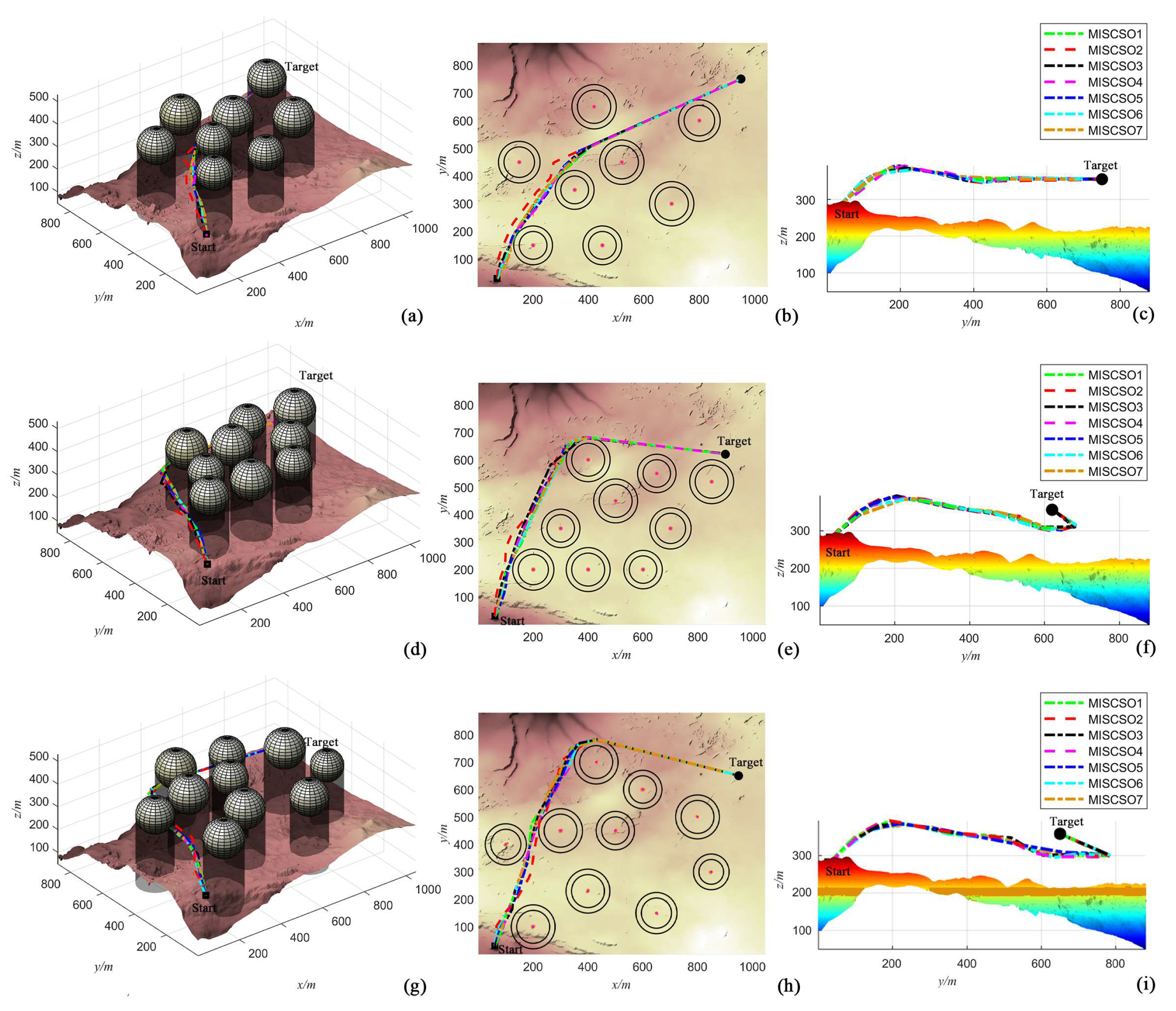
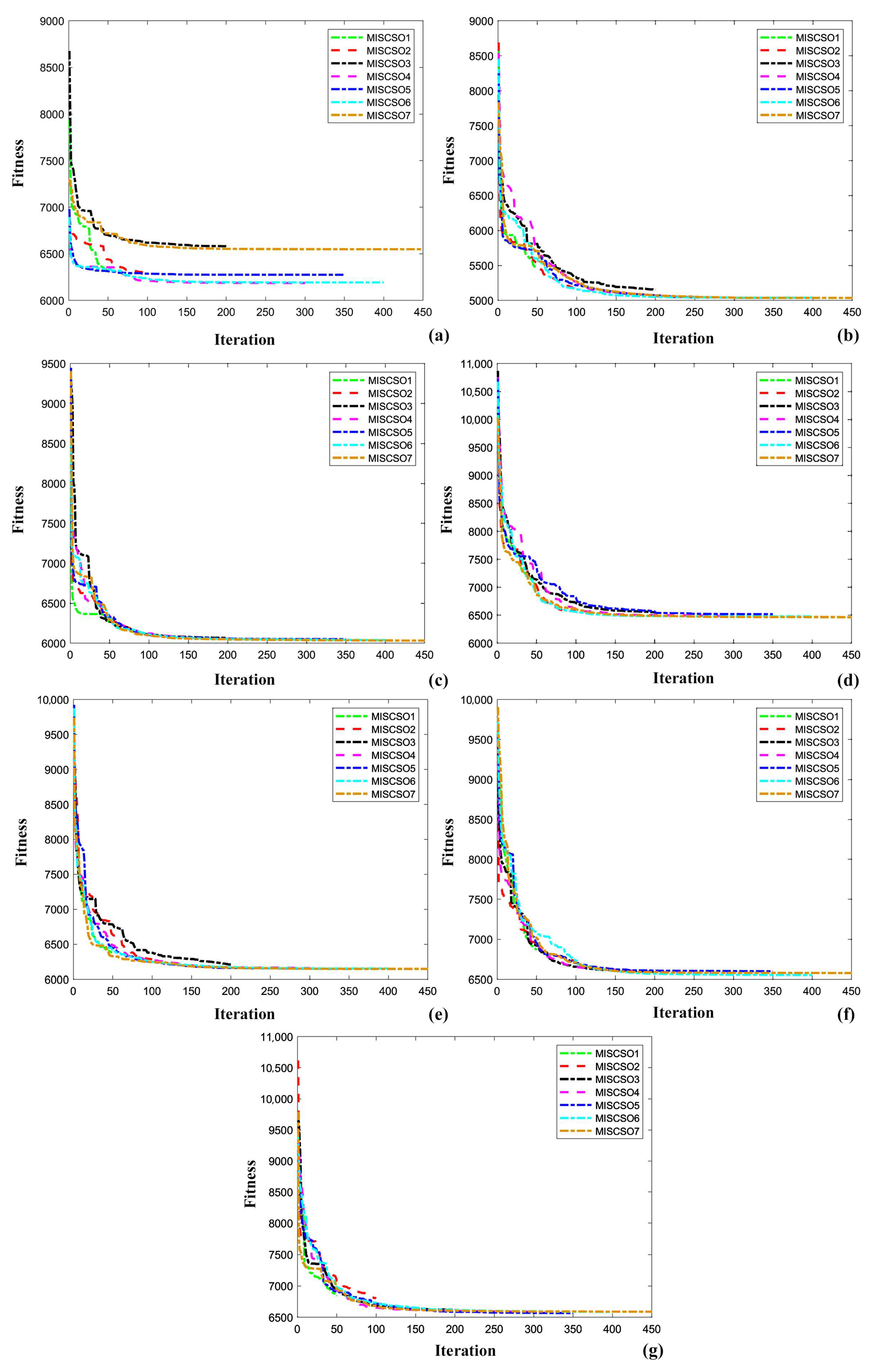
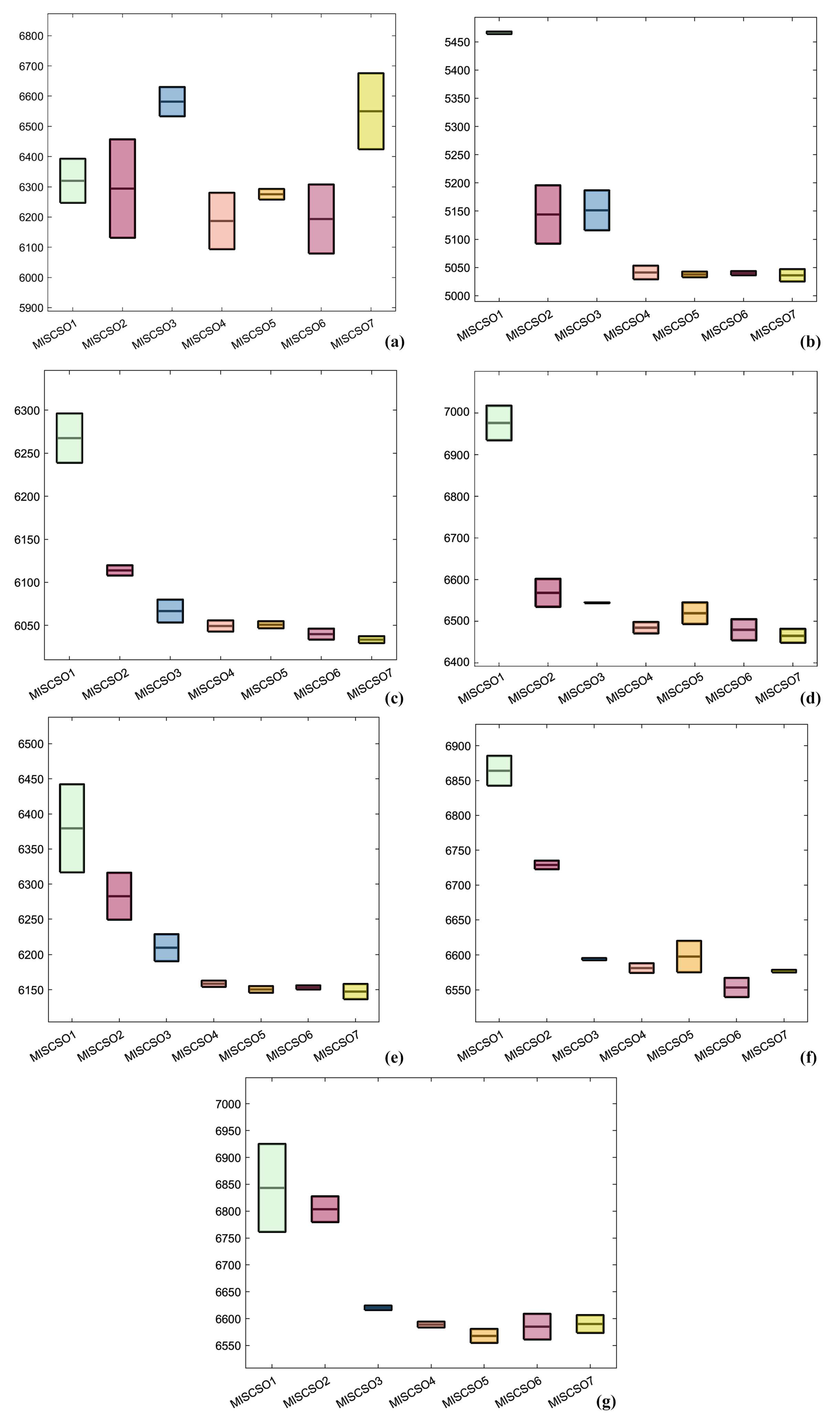
3.2.2. Maximum Number of Iterations (M)
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Name | Metric | MISCSO | SCSO | SMOA | WOA | BWO | ACO | RSA |
|---|---|---|---|---|---|---|---|---|
| f1 | Best | 100.04 | 1089.44 | 6.17 × 107 | 7.91 × 104 | 3.79 × 107 | 194.18 | 8.95 × 109 |
| STD | 0.04 | 2.41 × 105 | 4.42 × 107 | 3.23 × 105 | 8.75 × 106 | 3657.95 | 1.47 × 109 | |
| Average | 100.09 | 1.19 × 105 | 1.08 × 108 | 3.94 × 105 | 4.82 × 107 | 1922.78 | 1.03 × 1010 | |
| Worst | 100.14 | 5.49 × 105 | 1.66 × 108 | 9.17 × 105 | 6.09 × 107 | 8465.10 | 1.27 × 1010 | |
| f2 | Best | 300.00 | 368.28 | 1684.30 | 563.21 | 525.00 | 990.97 | 5485.49 |
| STD | 0.00 | 2086.98 | 1632.34 | 1428.02 | 213.28 | 726.61 | 1983.29 | |
| Average | 300.00 | 1994.09 | 4097.54 | 1565.74 | 886.18 | 1762.15 | 7454.23 | |
| Worst | 300.00 | 5506.34 | 6119.30 | 3912.05 | 1061.43 | 2914.76 | 1.06 × 104 |
| Function Name | Metric | MISCSO | SCSO | SMOA | WOA | BWO | ACO | RSA |
|---|---|---|---|---|---|---|---|---|
| f3 | Best | 400.00 | 400.58 | 410.87 | 401.61 | 408.19 | 403.27 | 577.91 |
| STD | 0.00 | 26.75 | 4.63 | 28.97 | 1.37 | 0.09 | 503.57 | |
| Average | 400.00 | 427.00 | 414.95 | 419.81 | 410.13 | 403.41 | 969.93 | |
| Worst | 400.00 | 471.48 | 422.80 | 469.99 | 412.06 | 403.50 | 1730.58 | |
| f4 | Best | 504.98 | 517.96 | 522.24 | 540.83 | 517.35 | 529.41 | 553.71 |
| STD | 2.09 | 7.94 | 7.09 | 20.96 | 3.10 | 2.80 | 21.84 | |
| Average | 508.62 | 529.36 | 534.56 | 562.13 | 521.76 | 531.38 | 579.47 | |
| Worst | 510.02 | 536.85 | 540.41 | 595.15 | 525.70 | 536.31 | 607.32 | |
| f5 | Best | 600.01 | 606.38 | 605.23 | 626.22 | 602.97 | 600.00 | 637.38 |
| STD | 0.03 | 14.80 | 2.69 | 17.18 | 0.63 | 0.00 | 4.21 | |
| Average | 600.04 | 620.12 | 608.02 | 637.27 | 603.66 | 600.00 | 641.39 | |
| Worst | 600.08 | 644.72 | 611.77 | 666.98 | 604.61 | 600.00 | 648.10 | |
| f6 | Best | 715.70 | 742.96 | 756.26 | 750.62 | 730.31 | 738.81 | 782.02 |
| STD | 5.72 | 10.06 | 1.98 | 13.32 | 4.36 | 2.30 | 12.74 | |
| Average | 723.20 | 753.23 | 758.78 | 768.13 | 733.68 | 741.65 | 797.29 | |
| Worst | 730.36 | 765.40 | 760.72 | 783.36 | 741.05 | 743.40 | 815.64 | |
| f7 | Best | 807.96 | 823.94 | 829.32 | 819.92 | 810.83 | 811.38 | 835.11 |
| STD | 5.99 | 7.07 | 4.80 | 17.98 | 3.40 | 8.20 | 10.43 | |
| Average | 813.73 | 833.82 | 836.18 | 842.10 | 815.51 | 825.94 | 845.17 | |
| Worst | 821.89 | 842.38 | 840.56 | 870.12 | 820.06 | 830.94 | 860.99 | |
| f8 | Best | 900.00 | 915.42 | 982.62 | 1017.30 | 907.41 | 900.00 | 1356.63 |
| STD | 4.47 | 38.03 | 27.47 | 608.37 | 4.12 | 0.00 | 107.33 | |
| Average | 903.45 | 959.62 | 1013.12 | 1539.96 | 911.70 | 900.00 | 1451.14 | |
| Worst | 909.23 | 1015.33 | 1042.63 | 2424.16 | 917.17 | 900.00 | 1627.26 | |
| f9 | Best | 1498.56 | 1499.79 | 2092.30 | 1808.04 | 1215.73 | 2648.94 | 2073.84 |
| STD | 169.73 | 230.02 | 122.48 | 186.28 | 171.73 | 123.31 | 577.17 | |
| Average | 1650.38 | 1878.55 | 2303.80 | 1990.47 | 1361.79 | 2758.42 | 2599.13 | |
| Worst | 1942.86 | 2127.95 | 2406.51 | 2283.28 | 1636.00 | 2894.87 | 3333.27 |
| Function Name | Metric | MISCSO | SCSO | SMOA | WOA | BWO | ACO | RSA |
|---|---|---|---|---|---|---|---|---|
| f10 | Best | 1104.50 | 1112.49 | 1135.96 | 1129.37 | 1114.43 | 1106.15 | 2352.44 |
| STD | 11.56 | 76.61 | 22.13 | 28.34 | 8.76 | 1.11 | 1386.97 | |
| Average | 1116.26 | 1176.79 | 1160.55 | 1160.83 | 1120.02 | 1107.69 | 3510.24 | |
| Worst | 1131.58 | 1309.88 | 1195.63 | 1186.24 | 1135.55 | 1108.81 | 5682.04 | |
| f11 | Best | 1331.16 | 1.93 × 105 | 2.32 × 106 | 5.41 × 104 | 2.25 × 105 | 1.31 × 104 | 7.86 × 107 |
| STD | 138.73 | 9.80 × 105 | 2.98 × 106 | 1.77 × 106 | 2.38 × 105 | 2.96 × 104 | 1.63 × 108 | |
| Average | 1459.82 | 1.44 × 106 | 4.75 × 106 | 1.66 × 106 | 5.58 × 105 | 2.90 × 104 | 1.64 × 108 | |
| Worst | 1660.87 | 2.52 × 106 | 8.82 × 106 | 3.91 × 106 | 8.55 × 105 | 8.17 × 104 | 4.55 × 108 | |
| f12 | Best | 1306.42 | 2927.92 | 6992.05 | 3592.02 | 7090.00 | 6109.62 | 3.80 × 106 |
| STD | 2.74 | 7414.25 | 5506.73 | 2.78 × 104 | 3240.47 | 6777.05 | 4.74 × 107 | |
| Average | 1310.54 | 8469.54 | 1.42 × 104 | 3.07 × 104 | 1.07 × 104 | 1.18 × 104 | 5.22 × 107 | |
| Worst | 1314.03 | 1.90 × 104 | 2.24 × 104 | 6.66 × 104 | 1.39 × 104 | 2.11 × 104 | 1.05 × 108 | |
| f13 | Best | 1402.79 | 1459.58 | 1487.10 | 1537.08 | 1430.81 | 1506.61 | 1581.91 |
| STD | 6.49 | 1667.35 | 38.40 | 243.10 | 109.49 | 868.78 | 2101.40 | |
| Average | 1407.72 | 2220.64 | 1527.48 | 1683.29 | 1539.85 | 2345.87 | 4872.09 | |
| Worst | 1418.61 | 5203.23 | 1583.49 | 2105.32 | 1707.76 | 3633.26 | 6825.12 | |
| f14 | Best | 1501.18 | 1582.07 | 1916.71 | 2860.87 | 1525.79 | 2988.62 | 4817.00 |
| STD | 3.81 | 399.28 | 182.05 | 2039.76 | 1014.79 | 5912.52 | 7440.52 | |
| Average | 1504.25 | 1926.98 | 2145.06 | 6213.46 | 2237.43 | 8474.08 | 9200.37 | |
| Worst | 1510.88 | 2415.23 | 2345.93 | 8302.91 | 3983.13 | 1.85 × 104 | 2.24 × 104 | |
| f15 | Best | 1600.55 | 1744.28 | 1639.91 | 1742.89 | 1606.56 | 1618.22 | 1862.44 |
| STD | 104.64 | 132.17 | 30.96 | 176.00 | 52.09 | 41.98 | 145.84 | |
| Average | 1674.20 | 1851.25 | 1677.87 | 1885.09 | 1633.92 | 1671.75 | 2044.53 | |
| Worst | 1838.23 | 2004.66 | 1716.07 | 2142.06 | 1726.73 | 1720.79 | 2190.36 | |
| f16 | Best | 1701.43 | 1748.29 | 1753.26 | 1770.06 | 1728.69 | 1733.31 | 1795.26 |
| STD | 9.69 | 10.25 | 5.89 | 34.03 | 10.24 | 14.66 | 52.28 | |
| Average | 1717.93 | 1763.88 | 1761.59 | 1800.62 | 1739.32 | 1749.00 | 1832.23 | |
| Worst | 1725.86 | 1775.75 | 1768.65 | 1856.04 | 1756.11 | 1770.33 | 1920.24 | |
| f17 | Best | 1802.01 | 4334.47 | 1.33 × 104 | 8439.07 | 4295.59 | 6.26 × 104 | 3.30 × 105 |
| STD | 11.54 | 1.30 × 104 | 2.21 × 104 | 9851.29 | 1.31 × 104 | 6.71 × 104 | 4.73 × 106 | |
| Average | 1810.24 | 1.43 × 104 | 3.48 × 104 | 2.42 × 104 | 1.68 × 104 | 1.66 × 105 | 4.22 × 106 | |
| Worst | 1830.46 | 3.32 × 104 | 6.79 × 104 | 3.52 × 104 | 3.82 × 104 | 2.38 × 105 | 9.99 × 106 | |
| f18 | Best | 1901.09 | 1911.97 | 1974.90 | 2905.19 | 2205.69 | 4078.99 | 2.16 × 104 |
| STD | 0.95 | 39.81 | 111.71 | 1.26 × 105 | 427.53 | 4027.01 | 4.93 × 105 | |
| Average | 1901.65 | 1950.77 | 2062.28 | 7.53 × 104 | 2708.82 | 7314.75 | 4.37 × 105 | |
| Worst | 1903.33 | 2016.30 | 2220.71 | 2.96 × 105 | 3270.77 | 14,328.77 | 1.06 × 106 | |
| f19 | Best | 2002.48 | 2058.37 | 2062.10 | 2081.71 | 2028.74 | 2020.02 | 2215.51 |
| STD | 9.30 | 52.95 | 7.88 | 83.98 | 3.41 | 0.28 | 31.00 | |
| Average | 2009.28 | 2110.80 | 2070.89 | 2155.21 | 2032.06 | 2020.24 | 2256.23 | |
| Worst | 2025.31 | 2170.45 | 2080.42 | 2279.13 | 2036.31 | 2020.68 | 2289.92 |
| Function Name | Metric | MISCSO | SCSO | SMOA | WOA | BWO | ACO | RSA |
|---|---|---|---|---|---|---|---|---|
| f20 | Best | 2200.00 | 2208.93 | 2207.01 | 2227.12 | 2202.60 | 2280.19 | 2250.45 |
| STD | 64.28 | 56.66 | 6.80 | 62.83 | 1.87 | 22.08 | 58.39 | |
| Average | 2269.98 | 2308.91 | 2214.33 | 2336.85 | 2204.51 | 2319.07 | 2294.83 | |
| Worst | 2327.41 | 2343.76 | 2225.03 | 2382.40 | 2207.17 | 2335.05 | 2388.16 | |
| f21 | Best | 2300.90 | 2232.98 | 2312.53 | 2309.78 | 2233.28 | 2302.43 | 2785.73 |
| STD | 1.22 | 35.79 | 5.27 | 5.59 | 36.48 | 395.27 | 253.15 | |
| Average | 2301.57 | 2295.33 | 2317.83 | 2315.48 | 2298.43 | 2480.32 | 2973.24 | |
| Worst | 2303.73 | 2321.33 | 2325.69 | 2324.32 | 2318.22 | 3187.39 | 3396.56 | |
| f22 | Best | 2608.25 | 2620.92 | 2635.97 | 2619.01 | 2618.61 | 2632.29 | 2669.38 |
| STD | 4.94 | 9.05 | 2.32 | 15.26 | 2.90 | 3.61 | 19.53 | |
| Average | 2612.93 | 2635.29 | 2639.83 | 2632.67 | 2621.93 | 2636.75 | 2690.68 | |
| Worst | 2620.28 | 2645.81 | 2641.83 | 2657.00 | 2626.43 | 2640.64 | 2715.42 | |
| f23 | Best | 2734.30 | 2518.73 | 2585.00 | 2514.24 | 2527.26 | 2759.58 | 2824.45 |
| STD | 4.18 | 108.94 | 97.30 | 123.13 | 97.48 | 2.87 | 28.09 | |
| Average | 2740.15 | 2713.05 | 2673.60 | 2731.99 | 2577.97 | 2764.48 | 2852.38 | |
| Worst | 2745.89 | 2771.50 | 2779.26 | 2812.92 | 2752.09 | 2767.11 | 2897.88 | |
| f24 | Best | 2897.94 | 2913.46 | 2918.42 | 2907.33 | 2903.83 | 2943.98 | 3288.10 |
| STD | 30.72 | 35.71 | 7.18 | 22.05 | 5.16 | 1.06 | 56.89 | |
| Average | 2930.26 | 2942.92 | 2925.69 | 2927.19 | 2908.71 | 2945.16 | 3375.42 | |
| Worst | 2967.68 | 3000.74 | 2937.29 | 2951.26 | 2915.85 | 2945.97 | 3437.43 | |
| f25 | Best | 2900.00 | 2900.05 | 2972.53 | 3015.22 | 2921.19 | 3233.69 | 3430.28 |
| STD | 50.28 | 55.19 | 17.58 | 501.48 | 17.14 | 60.32 | 455.92 | |
| Average | 2954.68 | 2959.36 | 2994.83 | 3907.67 | 2935.90 | 3308.36 | 4057.46 | |
| Worst | 3000.01 | 3013.10 | 3014.26 | 4183.29 | 2964.36 | 3378.75 | 4500.62 | |
| f26 | Best | 3073.47 | 3093.04 | 3077.95 | 3093.28 | 3090.35 | 3173.62 | 3119.34 |
| STD | 1.98 | 35.18 | 0.69 | 49.71 | 1.55 | 11.04 | 75.81 | |
| Average | 3075.29 | 3112.74 | 3078.96 | 3123.75 | 3092.59 | 3190.49 | 3176.15 | |
| Worst | 3078.34 | 3174.96 | 3079.88 | 3211.81 | 3093.97 | 3200.00 | 3309.34 | |
| f27 | Best | 3194.53 | 3100.05 | 3223.88 | 3230.02 | 3116.71 | 3297.09 | 3812.87 |
| STD | 55.59 | 135.07 | 21.89 | 94.05 | 28.68 | 1.01 | 28.54 | |
| Average | 3259.46 | 3340.75 | 3263.03 | 3334.34 | 3153.36 | 3298.19 | 3852.27 | |
| Worst | 3300.00 | 3412.70 | 3273.01 | 3411.91 | 3180.49 | 3299.72 | 3885.93 | |
| f28 | Best | 3132.88 | 3157.13 | 3186.35 | 3179.14 | 3161.93 | 3227.18 | 3232.37 |
| STD | 25.70 | 44.71 | 28.46 | 155.94 | 13.31 | 29.15 | 106.91 | |
| Average | 3150.07 | 3207.19 | 3208.04 | 3371.21 | 3172.00 | 3257.18 | 3351.24 | |
| Worst | 3195.47 | 3255.05 | 3256.36 | 3591.07 | 3194.55 | 3301.10 | 3473.92 | |
| f29 | Best | 3247.28 | 4828.62 | 3564.07 | 14,381.73 | 8971.21 | 5391.90 | 2.02 × 106 |
| STD | 1951.57 | 5.95 × 105 | 201.26 | 1.25 × 106 | 4.23 × 104 | 4665.66 | 8.09 × 106 | |
| Average | 4155.55 | 3.04 × 105 | 3708.90 | 1.48 × 106 | 5.01 × 104 | 9042.96 | 9.09 × 106 | |
| Worst | 7646.19 | 1.37 × 106 | 4050.50 | 2.55 × 106 | 1.00 × 105 | 1.68 × 104 | 1.89 × 107 |
References
- Huang, T.; Huang, D.; Qin, N.; Li, Y. Path planning and control of a quadrotor UAV based on an improved APF using parallel search. Int. J. Aerosp. Eng. 2021, 2021, 5524841. [Google Scholar] [CrossRef]
- Fu, G.; Gao, Y.; Liu, L.; Yang, M.; Zhu, X. UAV Mission Path Planning Based on Reinforcement Learning in Dynamic Environment. J. Funct. Space. 2023, 2023, 9708143. [Google Scholar] [CrossRef]
- Yuan, M.; Zhou, T.; Chen, M. Improved lazy theta* algorithm based on octree map for path planning of UAV. Def. Technol. 2023, 23, 8–18. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, X.; Yang, Y.; Zhang, W. FC-RRT*: An Improved Path Planning Algorithm for UAV in 3D Complex Environment. ISPRS Int. J. Geo-Inf. 2022, 11, 112. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Zou, W.; Cai, J.; He, H.; Tan, T. Path Planning for UAV Based on Improved PRM. Energies 2022, 15, 7267. [Google Scholar] [CrossRef]
- Li, J.; Liao, C.; Zhang, W.; Fu, H.; Fu, S. UAV Path Planning Model Based on R5DOS Model Improved A-Star Algorithm. Appl. Sci. 2022, 12, 11338. [Google Scholar] [CrossRef]
- Wang, X.; Cheng, M.; Zhang, S.; Gong, H. Multi-UAV Cooperative Obstacle Avoidance of 3D Vector Field Histogram Plus and Dynamic Window Approach. Drones 2023, 7, 504. [Google Scholar] [CrossRef]
- Ait-Saadi, A.; Meraihi, Y.; Soukane, A.; Ramdane-Cherif, A.; Gabis, A.B. A Novel hybrid Chaotic Aquila Optimization algorithm with Simulated Annealing for Unmanned Aerial Vehicles path planning. Comput. Electr. Eng. 2022, 69, 2093–2123. [Google Scholar] [CrossRef]
- Deng, L.; Chen, H.; Zhang, X.; Liu, H. Three-Dimensional Path Planning of UAV Based on Improved Particle Swarm Optimization. Mathematics 2023, 11, 1987. [Google Scholar] [CrossRef]
- Chen, Q.; He, Q.; Zhang, D. UAV Path Planning Based on an Improved Chimp Optimization Algorithm. Axioms 2023, 12, 702. [Google Scholar] [CrossRef]
- Zhang, R.; Li, S.; Ding, Y.; Qin, X.; Xia, Q. UAV Path Planning Algorithm Based on Improved Harris Hawks Optimization. Sensors 2022, 22, 5232. [Google Scholar] [CrossRef] [PubMed]
- Rajeev, K.; Laxman, S.; Rajdev, T. Novel Reinforcement Learning Guided Enhanced Variable Weight Grey Wolf Optimization (RLV-GWO) Algorithm for Multi-UAV Path Planning. Wirel. Pers. Commun. 2023, 131, 2093–2123. [Google Scholar]
- Saxena, P.; Tayal, S.; Gupta, R.; Maheshwari, A.; Kaushal, G.; Tiwari, R. Three-dimensional route planning for multiple unmanned aerial vehicles using Salp Swarm Algorithm. J. Exp. Theor. Artif. Intell. 2022, 35, 1059–1078. [Google Scholar]
- Wang, W.; Chen, Y.; Tian, J. SGGTSO: A Spherical Vector-Based Optimization Algorithm for 3D UAV Path Planning. Drones 2023, 7, 452. [Google Scholar] [CrossRef]
- Chen, H.; Liang, Y.; Meng, X. A UAV Path Planning Method for Building Surface Information Acquisition Utilizing Opposition-Based Learning Artificial Bee Colony Algorithm. Remote Sens. 2023, 15, 4312. [Google Scholar] [CrossRef]
- Meng, X.; Zhu, X.; Zhao, J. Obstacle Avoidance Path Planning Using the Elite Ant Colony Algorithm for Parameter Optimization of Unmanned Aerial Vehicles. Arab. J. Sci. Eng. 2023, 48, 2261–2275. [Google Scholar] [CrossRef]
- Shen, Q.; Zhang, D.; Xie, M.; He, Q. Multi-Strategy Enhanced Dung Beetle Optimizer and Its Application in Three-Dimensional UAV Path Planning. Symmetry 2023, 15, 1432. [Google Scholar] [CrossRef]
- Wu, X.; Xu, L.; Zhen, R.; Wu, X. Global and Local Moth-flame Optimization Algorithm for UAV Formation Path Planning Under Multi-constraints. Int. J. Control Autom. 2023, 21, 1032–1047. [Google Scholar] [CrossRef]
- Hayal, M.; Elsayed, E.; Kakati, D.; Singh, M.; Elfikky, A.; Boghdady, A.; Grover, A.; Mehta, S.; Mohsan, S.; Nurhidayat, I. Modeling and investigation on the performance enhancement of hovering UAV-based FSO relay optical wireless communication systems under pointing errors and atmospheric turbulence effects. Opt. Quantum Electron. 2023, 55, 1–23. [Google Scholar]
- Elsayed, E. Investigations on OFDM UAV-based free-space optical transmission system with scintillation mitigation for optical wireless communication-to-ground links in atmospheric turbulence. Opt. Quantum Electron. 2024, 56, 837. [Google Scholar] [CrossRef]
- Kvitko, D.; Rybin, V.; Bayazitov, O.; Karimov, A.; Karimov, T.; Butusov, D. Chaotic Path-Planning Algorithm Based on Courbage–Nekorkin Artificial Neuron Model. Mathematics 2024, 12, 892. [Google Scholar] [CrossRef]
- Li, C.; Huang, X.; Ding, J.; Song, K.; Lu, S. Global path planning based on a bidirectional alternating search A* algorithm for mobile robots. Comput. Ind. Eng. 2022, 168, 108123. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.-H. Neural RRT*: Learning-Based Optimal Path Planning. IEEE T Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Lopes, G.; Hoffman, D. An Optimized Breadth-First Search Algorithm for Routing in Optical Access Networks. IEEE Lat. Am. Trans. 2019, 17, 1088–1095. [Google Scholar] [CrossRef]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problems. Eng. Comput. 2022, 39, 2627–2651. [Google Scholar] [CrossRef]
- Farzad, K.; Sajjad, N.; Fateme, A.; Mine, A. Chaotic Sand Cat Swarm Optimization. Mathematics 2023, 11, 2340. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Q.; Zhang, L. An Adaptive Sand Cat Swarm Algorithm Based on Cauchy Mutation and Optimal Neighborhood Disturbance Strategy. Biomimetics 2023, 8, 191. [Google Scholar] [CrossRef] [PubMed]
- Wu, D.; Rao, H.; Wen, C.; Jia, H.; Liu, Q.; Abualigah, L. Modified Sand Cat Swarm Optimization Algorithm for Solving Constrained Engineering Optimization Problems. Mathematics 2022, 10, 4350. [Google Scholar] [CrossRef]
- Yao, L.; Yang, J.; Yuan, P.; Li, G.; Lu, Y. Multi-Strategy Improved Sand Cat Swarm Optimization: Global Optimization and Feature Selection. Biomimetics 2023, 8, 492. [Google Scholar] [CrossRef] [PubMed]
- Qadir, Z.; Zafar, M.H.; Moosavi, S. Autonomous UAV-path planning optimization using metaheuristic approach for pre-disaster assessment. IEEE Internet Things 2021, 9, 12505–12514. [Google Scholar] [CrossRef]
- Seo, D.; Kang, J. Collision-avoided Tracking Control of UAV Using Velocity-adaptive 3D Local Path Planning. Int. J. Control Autom. Syst. 2023, 21, 231–243. [Google Scholar] [CrossRef]
- Jayaweera, H.; Hanoun, S. Path planning of unmanned aerial vehicles (UAVs) in windy environments. Drones 2022, 6, 101. [Google Scholar] [CrossRef]
- Ali, A.; Zhang, G.; Zhen, G. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment. Meas. Control 2023, 56, 459–469. [Google Scholar] [CrossRef]
- Kyriakakis, N.A.; Marinaki, M.; Matsatsinis, N. A cumulative unmanned aerial vehicle routing problem approach for humanitarian coverage path planning. Eur. J. Oper. Res. 2022, 300, 992–1004. [Google Scholar] [CrossRef]
- Balasubramanian, E.; Elangovan, E.; Tamilarasan, P.; Kanagachidambaresan, G.R.; Chutia, D. Optimal energy efficient path planning of UAV using hybrid MACO-MEA* algorithm: Theoretical and experimental approach. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 13847–13867. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.T.R.; Saad, M.M.; Ru, Y.; Seo, J.; Kim, D. Aspects of UAV path planning: Overview and applications. Int. J. Commun. Syst. 2021, 34, e4827. [Google Scholar] [CrossRef]
- Deng, M.; Yang, Q.; Peng, Y. A Real-Time Path Planning Method for Urban Low-Altitude Logistics UAVs. Sensors 2023, 23, 747–753. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhang, R.; Zhao, H. Path planning of multiple unmanned aerial vehicles covering multiple regions based on minimum consumption ratio. Aerospace 2023, 10, 93–102. [Google Scholar] [CrossRef]
- Chen, Q.; Li, Q.; Li, R. UAV Network Path Planning and Optimization Using a Vehicle Routing Model. Remote Sens. 2023, 15, 2227–2247. [Google Scholar] [CrossRef]
- Luo, J.; Tian, Y.; Wang, Z. Research on Unmanned Aerial Vehicle Path Planning. Drones 2024, 8, 51–64. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]








| Type | No. | Functions | Fi* = Fi(x*) |
|---|---|---|---|
| Unimodal Functions | 1 | Shifted and Rotated Bent Cigar Function | 100 |
| 2 | Shifted and Rotated Zakharov Function | 300 | |
| Multimodal Functions | 3 | Shifted and Rotated Rosenbrock’s Function | 400 |
| 4 | Shifted and Rotated Rastrigin’s Function | 500 | |
| 5 | Shifted and Rotated Schaffer’s F7 Function | 600 | |
| 6 | Shifted and Rotated Lunacek Bi-Rastrigin’s Function | 700 | |
| 7 | Shifted and Rotated Non-Continuous Rastrigin’s Function | 800 | |
| 8 | Shifted and Rotated Levy Function | 900 | |
| 9 | Shifted and Rotated Schwefel’s Function | 1000 | |
| Hybrid Functions | 10 | Hybrid Function 1 (N = 3) | 1100 |
| 11 | Hybrid Function 2 (N = 3) | 1200 | |
| 12 | Hybrid Function 3 (N = 3) | 1300 | |
| 13 | Hybrid Function 4 (N = 4) | 1400 | |
| 14 | Hybrid Function 5 (N = 4) | 1500 | |
| 15 | Hvbrid Function 6 (N = 4) | 1600 | |
| 16 | Hybrid Function 7 (N = 5) | 1700 | |
| 17 | Hybrid Function 8 (N = 5) | 1800 | |
| 18 | Hybrid Function 9 (N = 5) | 1900 | |
| 19 | Hybrid Function 10 (N = 6) | 2000 | |
| Composition Functions | 20 | Composition Function 1 (N = 3) | 2100 |
| 21 | Composition Function 2 (N = 3) | 2200 | |
| 22 | Composition Function 3 (N = 4) | 2300 | |
| 23 | Composition Function 4 (N = 4) | 2400 | |
| 24 | Composition Function 5 (N = 5) | 2500 | |
| 25 | Composition Function 6 (N = 5) | 2600 | |
| 26 | Composition Function 7 (N = 6) | 2700 | |
| 27 | Composition Function 8 (N = 6) | 2800 | |
| 28 | Composition Function 10 (N = 3) | 2900 | |
| 29 | Composition Function 10 (N = 3) | 3000 |
| Number of Obstacles | Metric | MISCSO | SCSO | SMOA | WOA | BWO | ACO | RSA |
|---|---|---|---|---|---|---|---|---|
| 4 | Best | 6.52 × 103 | 6.79 × 103 | 6.71 × 103 | 7.97 × 103 | 7.11 × 103 | 9.15 × 103 | 7.45 × 103 |
| STD | 6.35 × 103 | 6.78 × 103 | 6.49 × 103 | 7.85 × 103 | 7.03 × 103 | 8.12 × 103 | 7.20 × 103 | |
| Average | 240.96 | 8.85 | 301.78 | 172.43 | 100.78 | 1.47 × 103 | 358.88 | |
| Worst | 6.70 × 103 | 6.79 × 103 | 6.92 × 103 | 8.09 × 103 | 7.18 × 103 | 1.02 × 104 | 7.71 × 103 | |
| 5 | Best | 5.10 × 103 | 5.31 × 103 | 5.89 × 103 | 6.52 × 103 | 6.05 × 103 | 9.48 × 103 | 6.59 × 103 |
| STD | 5.09 × 103 | 5.27 × 103 | 5.75 × 103 | 6.49 × 103 | 5.94 × 103 | 9.19 × 103 | 6.19 × 103 | |
| Average | 11.31 | 48.02 | 197.19 | 45.26 | 154.17 | 418.94 | 564.17 | |
| Worst | 5.10 × 103 | 5.34 × 103 | 6.03 × 103 | 6.56 × 103 | 6.16 × 103 | 9.78 × 103 | 6.99 × 103 | |
| 6 | Best | 6.08 × 103 | 6.73 × 103 | 6.63 × 103 | 8.70 × 103 | 7.72 × 103 | 9.48 × 103 | 7.30 × 103 |
| STD | 6.07 × 103 | 6.61 × 103 | 6.61 × 103 | 8.49 × 103 | 7.58 × 103 | 9.33 × 103 | 6.85 × 103 | |
| Average | 12.93 | 170.03 | 21.34 | 290.12 | 203.13 | 207.44 | 641.85 | |
| Worst | 6.09 × 103 | 6.85 × 103 | 6.64 × 103 | 8.90 × 103 | 7.86 × 103 | 9.62 × 103 | 7.75 × 103 | |
| 7 | Best | 6.53 × 103 | 7.33 × 103 | 7.14 × 103 | 9.69 × 103 | 8.36 × 103 | 1.22 × 104 | 8.35 × 103 |
| STD | 6.50 × 103 | 7.27 × 103 | 6.61 × 103 | 8.71 × 103 | 8.26 × 103 | 1.19 × 104 | 8.27 × 103 | |
| Average | 30.12 | 93.05 | 738.92 | 1.38 × 103 | 133.19 | 445.25 | 110.59 | |
| Worst | 6.55 × 103 | 7.40 × 103 | 7.66 × 103 | 1.07 × 104 | 8.45 × 103 | 1.25 × 104 | 8.43 × 103 | |
| 8 | Best | 6.19 × 103 | 7.07 × 103 | 7.23 × 103 | 9.05 × 103 | 6.75 × 103 | 9.96 × 103 | 7.17 × 103 |
| STD | 6.18 × 103 | 6.44 × 103 | 7.14 × 103 | 8.62 × 103 | 6.75 × 103 | 9.23 × 103 | 6.97 × 103 | |
| Average | 24.97 | 885.57 | 134.42 | 616.99 | 5.85 | 1.04 × 103 | 293.57 | |
| Worst | 6.21 × 103 | 7.69 × 103 | 7.33 × 103 | 9.49 × 103 | 6.76 × 103 | 1.07 × 104 | 7.38 × 103 | |
| 9 | Best | 6.60 × 103 | 6.90 × 103 | 7.23 × 103 | 9.70 × 103 | 7.73 × 103 | 1.14 × 104 | 8.12 × 103 |
| STD | 6.59 × 103 | 6.76 × 103 | 7.10 × 103 | 9.64 × 103 | 7.70 × 103 | 1.10 × 104 | 7.98 × 103 | |
| Average | 14.61 | 197.35 | 189.43 | 80.07 | 45.15 | 666.68 | 185.03 | |
| Worst | 6.61 × 103 | 7.04 × 103 | 7.36 × 103 | 9.75 × 103 | 7.76 × 103 | 1.19 × 104 | 8.25 × 103 | |
| 10 | Best | 7.34 × 103 | 7.89 × 103 | 8.08 × 103 | 1.14 × 104 | 8.97 × 103 | 1.31 × 104 | 8.97 × 103 |
| STD | 6.64 × 103 | 7.55 × 103 | 7.41 × 103 | 1.09 × 104 | 8.33 × 103 | 1.16 × 104 | 8.72 × 103 | |
| Average | 268.51 | 311.97 | 404.77 | 247.60 | 476.98 | 1.21 × 103 | 131.38 | |
| Worst | 7.68 × 103 | 8.64 × 103 | 8.55 × 103 | 1.17 × 104 | 9.95 × 103 | 1.48 × 104 | 9.22 × 103 |
| Number of Obstacles | Metric | MISCSO1 (Pop = 300) | MISCSO2 (Pop = 100) | MISCSO3 (Pop = 200) | MISCSO4 (Pop = 400) | MISCSO5 (Pop = 500) | MISCSO6 (Pop = 600) | MISCSO7 (Pop = 700) |
|---|---|---|---|---|---|---|---|---|
| 4 | Average | 6253.12 | 6408.54 | 6141.48 | 6397.49 | 6307.58 | 6090.97 | 6247.06 |
| Best | 6171.94 | 6275.21 | 6140.33 | 6096.24 | 6095.43 | 6080.30 | 6078.93 | |
| STD | 114.81 | 188.55 | 1.63 | 426.04 | 300.03 | 15.10 | 237.77 | |
| Worst | 6334.30 | 6541.86 | 6142.63 | 6698.75 | 6519.74 | 6101.65 | 6415.19 | |
| Running time | 7.5967 | 3.0977 | 5.3839 | 9.7179 | 12.0983 | 14.2821 | 16.4367 | |
| 5 | Average | 5113.07 | 5391.26 | 5161.10 | 5089.36 | 5056.87 | 5036.86 | 5040.62 |
| Best | 5066.66 | 5191.93 | 5123.68 | 5079.81 | 5039.31 | 5035.66 | 5032.65 | |
| STD | 65.63 | 281.89 | 52.92 | 13.51 | 24.82 | 1.70 | 11.28 | |
| Worst | 5159.48 | 5590.59 | 5198.52 | 5098.91 | 5074.42 | 5038.07 | 5048.59 | |
| Running time | 8.7027 | 3.5553 | 6.108 | 11.0349 | 13.8485 | 16.2055 | 18.5735 | |
| 6 | Average | 6058.14 | 6358.67 | 6119.96 | 6068.57 | 6050.84 | 6043.95 | 6034.68 |
| Best | 6033.12 | 6317.51 | 6116.96 | 6058.51 | 6044.91 | 6030.43 | 6031.31 | |
| STD | 35.38 | 58.20 | 4.24 | 14.22 | 8.39 | 19.13 | 4.77 | |
| Worst | 6083.16 | 6399.82 | 6122.96 | 6078.63 | 6056.77 | 6057.48 | 6038.05 | |
| Running time | 9.1637 | 3.752 | 6.4094 | 11.6825 | 14.3126 | 16.9584 | 19.6273 | |
| 7 | Average | 6530.35 | 7149.56 | 6603.29 | 6517.12 | 6532.95 | 6471.09 | 6484.95 |
| Best | 6507.61 | 6908.15 | 6549.84 | 6484.57 | 6509.53 | 6466.80 | 6476.69 | |
| STD | 32.16 | 341.41 | 75.60 | 46.04 | 33.11 | 6.06 | 11.69 | |
| Worst | 6553.09 | 7390.97 | 6656.75 | 6549.68 | 6556.36 | 6475.37 | 6493.22 | |
| Running time | 10.7919 | 4.692 | 9.6348 | 13.2808 | 16.9696 | 19.6357 | 22.2701 | |
| 8 | Average | 6205.98 | 6447.50 | 6204.44 | 6260.59 | 6205.58 | 6166.82 | 6317.64 |
| Best | 6163.67 | 6325.64 | 6179.06 | 6172.79 | 6197.55 | 6163.41 | 6205.64 | |
| STD | 59.84 | 172.34 | 35.90 | 124.17 | 11.35 | 4.83 | 158.40 | |
| Worst | 6248.30 | 6569.36 | 6229.82 | 6348.39 | 6213.61 | 6170.23 | 6429.65 | |
| Running time | 11.2957 | 7.5831 | 10.0338 | 17.5382 | 19.0601 | 22.2505 | 25.965 | |
| 9 | Average | 6623.12 | 6809.26 | 6728.81 | 6607.71 | 6627.56 | 6560.26 | 6571.48 |
| Best | 6610.38 | 6758.10 | 6706.86 | 6576.46 | 6613.45 | 6559.71 | 6570.72 | |
| STD | 18.01 | 72.35 | 31.04 | 44.20 | 19.95 | 0.78 | 1.08 | |
| Worst | 6635.85 | 6860.42 | 6750.76 | 6638.96 | 6641.67 | 6560.81 | 6572.25 | |
| Running time | 11.4031 | 4.699 | 8.0093 | 15.0312 | 18.178 | 21.2108 | 24.5819 | |
| 10 | Average | 7395.97 | 7622.81 | 7514.50 | 7347.21 | 7290.99 | 7322.39 | 7299.44 |
| Best | 7393.95 | 7596.76 | 7451.65 | 7313.47 | 7282.41 | 7292.78 | 7281.16 | |
| STD | 2.85 | 36.84 | 88.89 | 47.71 | 12.13 | 41.88 | 25.85 | |
| Worst | 7397.98 | 7648.85 | 7577.35 | 7380.95 | 7299.57 | 7352.01 | 7317.72 | |
| Running time | 12.5477 | 5.1809 | 8.8299 | 16.099 | 20.6602 | 22.9782 | 27.1097 |
| Number of Obstacles | Metric | MISCSO1 (M1 = 50) | MISCSO2 (M2 = 100) | MISCSO3 (M3 = 200) | MISCSO4 (M4 = 300) | MISCSO5 (M5 = 350) | MISCSO6 (M6 = 400) | MISCSO7 (M7 = 450) |
|---|---|---|---|---|---|---|---|---|
| 4 | Average | 6319.80 | 6294.04 | 6581.71 | 6186.84 | 6275.32 | 6193.38 | 6549.98 |
| Best | 6247.31 | 6131.43 | 6533.61 | 6093.87 | 6258.17 | 6079.55 | 6424.62 | |
| STD | 102.53 | 229.96 | 68.02 | 131.48 | 24.25 | 160.98 | 177.28 | |
| Worst | 6392.30 | 6456.64 | 6629.80 | 6279.87 | 6292.47 | 6307.21 | 6675.33 | |
| Running time | 2.8948 | 5.7579 | 11.2253 | 16.9434 | 19.8533 | 23.0541 | 25.5226 | |
| 5 | Average | 5466.02 | 5143.94 | 5151.31 | 5041.09 | 5037.64 | 5039.84 | 5036.10 |
| Best | 5464.08 | 5092.40 | 5116.09 | 5029.25 | 5032.89 | 5036.39 | 5025.41 | |
| STD | 2.74 | 72.89 | 49.81 | 16.74 | 6.72 | 4.89 | 15.12 | |
| Worst | 5467.96 | 5195.48 | 5186.54 | 5052.93 | 5042.39 | 5043.30 | 5046.79 | |
| Running time | 2.8943 | 5.332 | 10.7116 | 16.668 | 18.4514 | 21.3263 | 26.2472 | |
| 6 | Average | 6267.53 | 6113.85 | 6066.65 | 6049.29 | 6050.75 | 6039.86 | 6033.43 |
| Best | 6239.06 | 6108.02 | 6053.49 | 6042.99 | 6046.88 | 6033.63 | 6029.59 | |
| STD | 40.27 | 8.26 | 18.62 | 8.90 | 5.48 | 8.82 | 5.44 | |
| Worst | 6296.01 | 6119.69 | 6079.82 | 6055.58 | 6054.63 | 6046.09 | 6037.28 | |
| Running time | 3.0729 | 6.0675 | 12.084 | 18.0471 | 21.0436 | 24.5181 | 27.1008 | |
| 7 | Average | 6975.91 | 6568.36 | 6544.50 | 6484.68 | 6519.41 | 6479.69 | 6465.22 |
| Best | 6934.77 | 6535.15 | 6544.32 | 6471.45 | 6493.92 | 6454.65 | 6448.92 | |
| STD | 58.18 | 46.97 | 0.25 | 18.70 | 36.05 | 35.41 | 23.06 | |
| Worst | 7017.06 | 6601.58 | 6544.68 | 6497.91 | 6544.90 | 6504.72 | 6481.53 | |
| Running time | 3.4173 | 6.7832 | 13.434 | 19.9774 | 23.3108 | 26.7366 | 30.4715 | |
| 8 | Average | 6379.41 | 6282.69 | 6209.77 | 6158.43 | 6150.34 | 6153.16 | 6147.28 |
| Best | 6316.90 | 6249.36 | 6190.68 | 6154.20 | 6145.79 | 6150.42 | 6136.60 | |
| STD | 88.41 | 47.13 | 27.00 | 5.98 | 6.44 | 3.87 | 15.10 | |
| Worst | 6441.93 | 6316.01 | 6228.86 | 6162.66 | 6154.90 | 6155.90 | 6157.95 | |
| Running time | 3.6462 | 7.1847 | 14.2915 | 21.4674 | 25.2968 | 28.4667 | 32.8664 | |
| 9 | Average | 6864.06 | 6728.83 | 6594.01 | 6581.21 | 6597.75 | 6553.33 | 6576.78 |
| Best | 6842.86 | 6722.80 | 6592.65 | 6574.50 | 6575.36 | 6539.72 | 6575.13 | |
| STD | 29.99 | 8.51 | 1.93 | 9.50 | 31.66 | 19.24 | 2.33 | |
| Worst | 6885.27 | 6734.85 | 6595.38 | 6587.93 | 6620.13 | 6566.93 | 6578.43 | |
| Running time | 4.2381 | 7.7054 | 15.4268 | 15.4268 | 26.5691 | 30.6416 | 36.6518 | |
| 10 | Average | 6843.25 | 6803.615 | 6620.16 | 6588.91 | 6567.85 | 6585.06 | 6590.03 |
| Best | 6761.66 | 6779.79 | 6616.22 | 6583.81 | 6555.10 | 6561.35 | 6573.71 | |
| STD | 115.38 | 33.69 | 5.56 | 7.21 | 18.03 | 33.53 | 23.08 | |
| Worst | 6924.84 | 6827.43 | 6624.09 | 6594.02 | 6580.60 | 6608.77 | 6606.35 | |
| Running time | 3.9733 | 7.9074 | 15.7263 | 23.6059 | 28.0165 | 31.3278 | 37.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Lu, Y.; Yang, B.; Yang, L.; Zhao, J.; Chen, Y.; Li, L. Research on a Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm for Three-Dimensional UAV Trajectory Path Planning. World Electr. Veh. J. 2024, 15, 244. https://doi.org/10.3390/wevj15060244
Liu L, Lu Y, Yang B, Yang L, Zhao J, Chen Y, Li L. Research on a Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm for Three-Dimensional UAV Trajectory Path Planning. World Electric Vehicle Journal. 2024; 15(6):244. https://doi.org/10.3390/wevj15060244
Chicago/Turabian StyleLiu, Lili, Yixin Lu, Bufan Yang, Longyue Yang, Jianyong Zhao, Yue Chen, and Longhai Li. 2024. "Research on a Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm for Three-Dimensional UAV Trajectory Path Planning" World Electric Vehicle Journal 15, no. 6: 244. https://doi.org/10.3390/wevj15060244
APA StyleLiu, L., Lu, Y., Yang, B., Yang, L., Zhao, J., Chen, Y., & Li, L. (2024). Research on a Multi-Strategy Improved Sand Cat Swarm Optimization Algorithm for Three-Dimensional UAV Trajectory Path Planning. World Electric Vehicle Journal, 15(6), 244. https://doi.org/10.3390/wevj15060244