
State-Feedback and Nonsmooth Controller Design for Truck Platoon Subject to Uncertainties and Disturbances


Abstract
:1. Introduction
1.1. Background of this Research
1.2. Related Works
2. Mathematical Background
3. Model Description and Problem Formulation
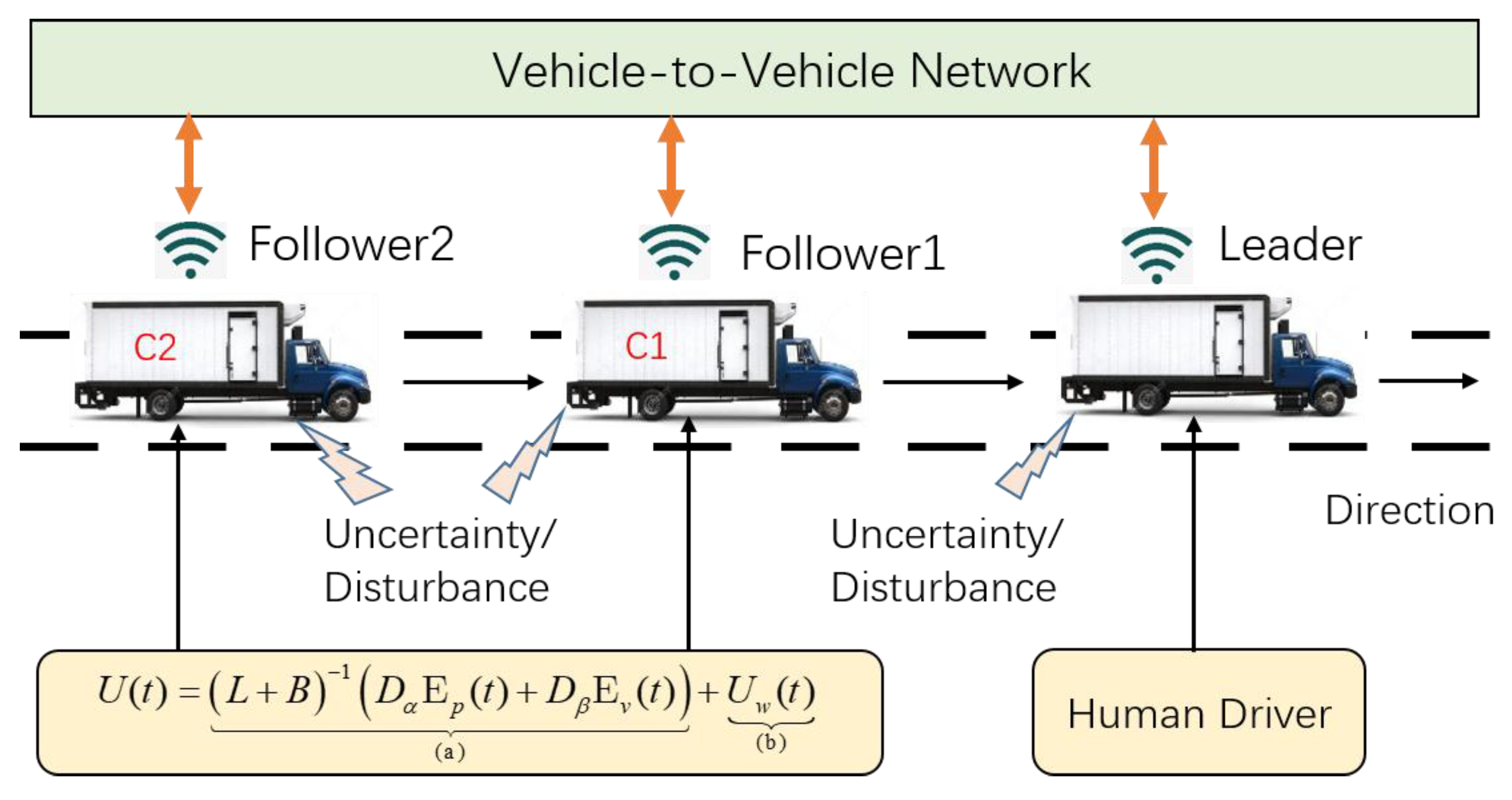
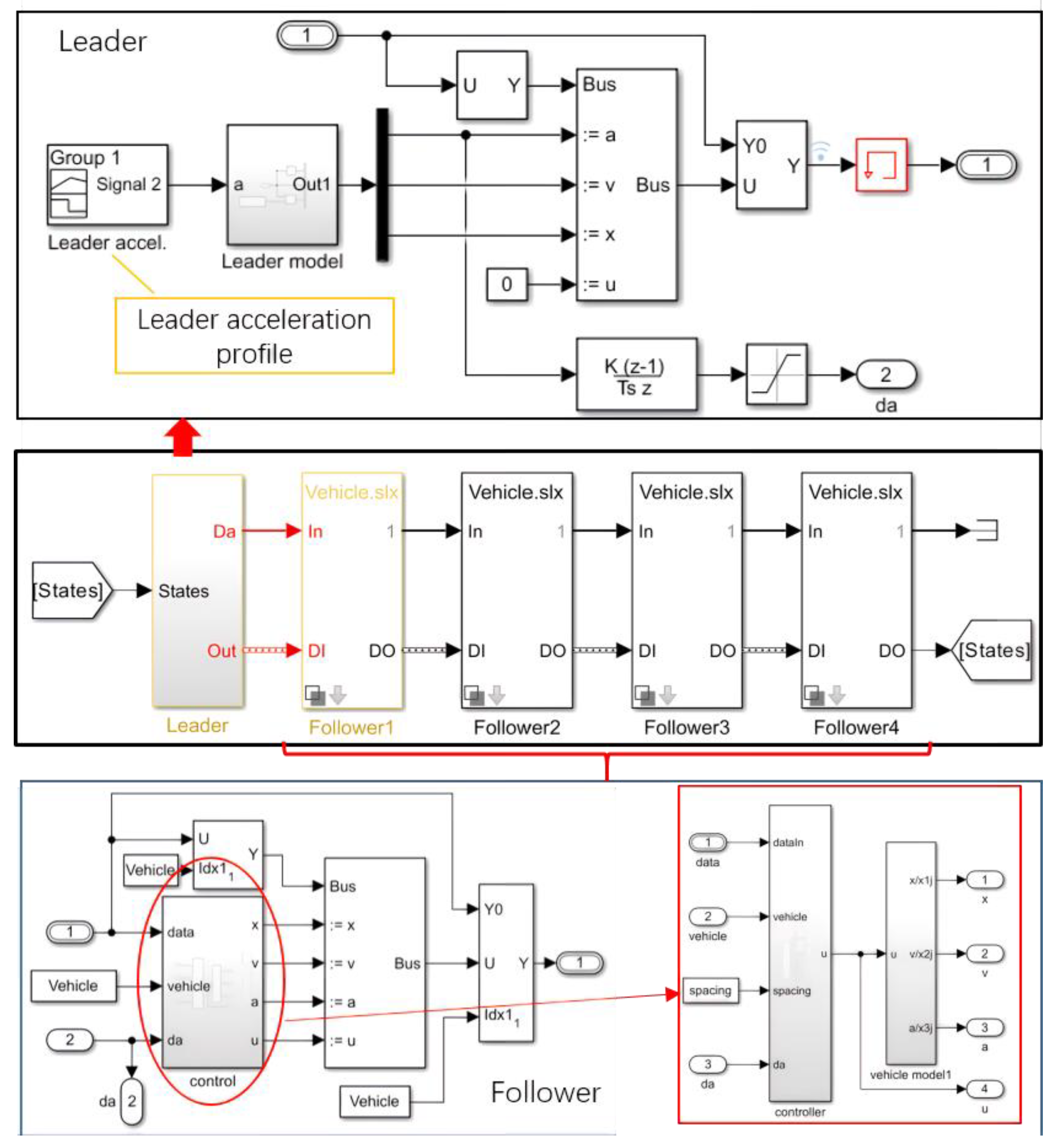
3.1. Vehicle Dynamics Modeling
3.2. Definition of Second-Order Consensus
4. Robust Controller Design
4.1. Platoon Error Dynamics Model
4.2. Derivation of the Controller
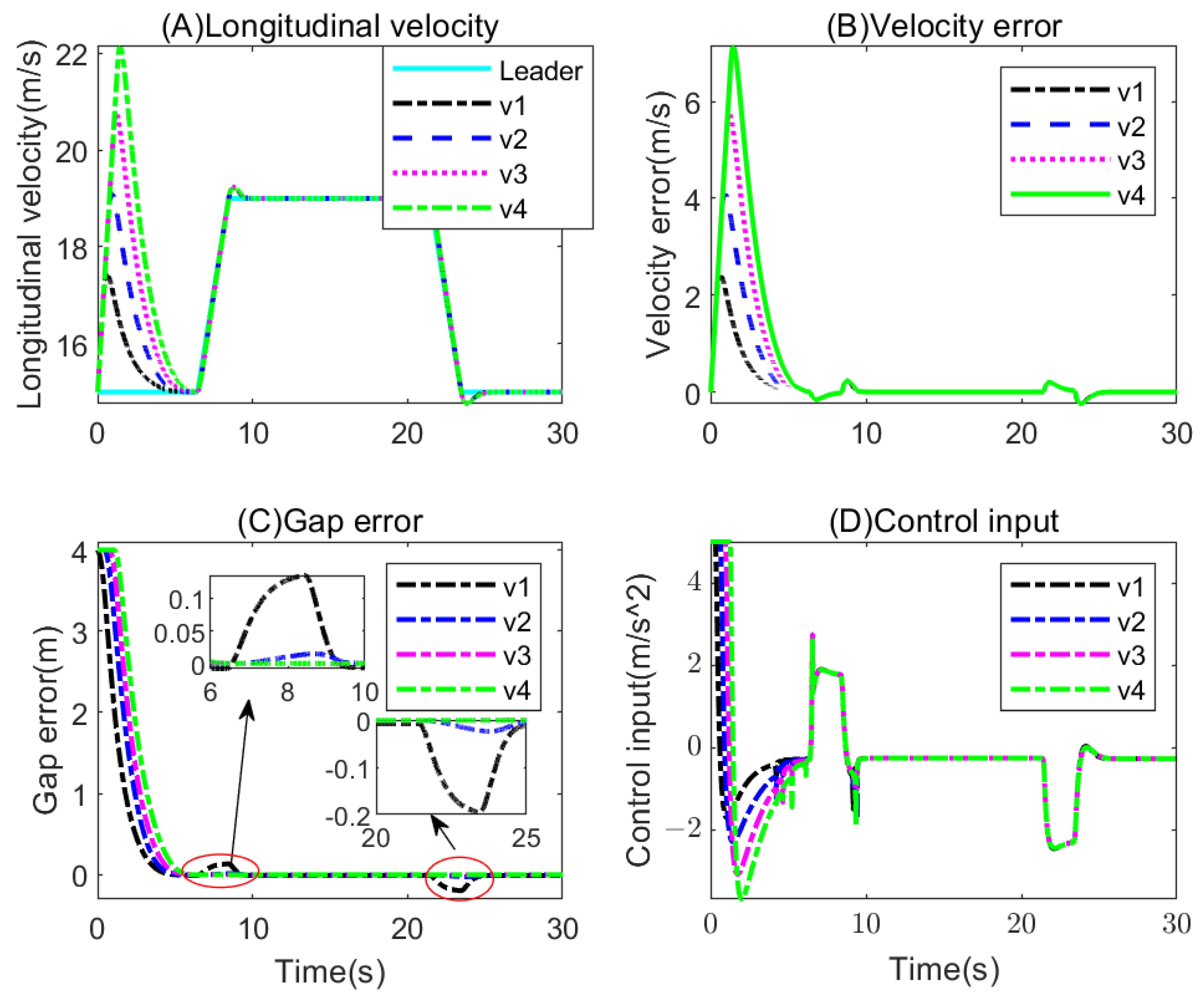
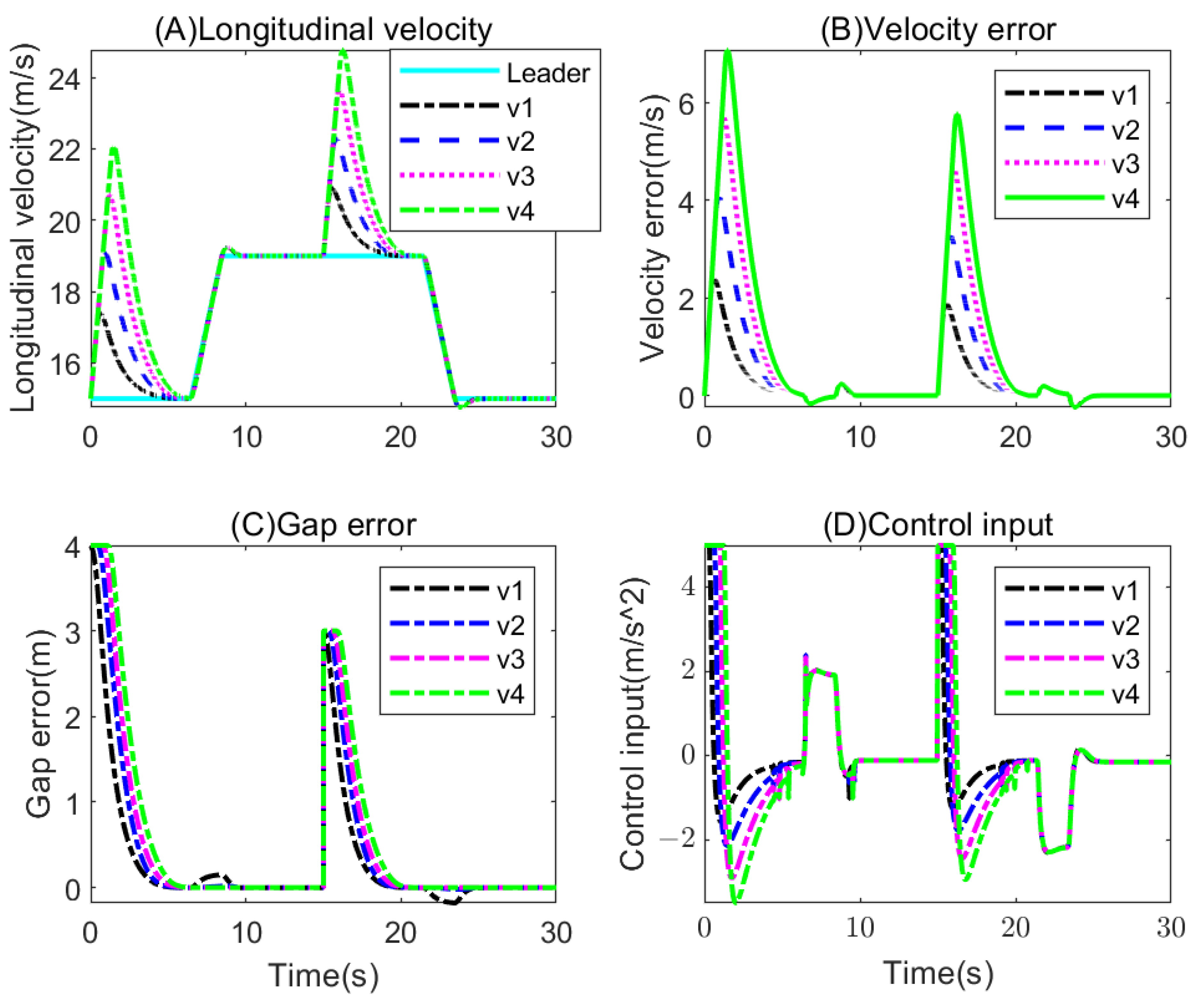
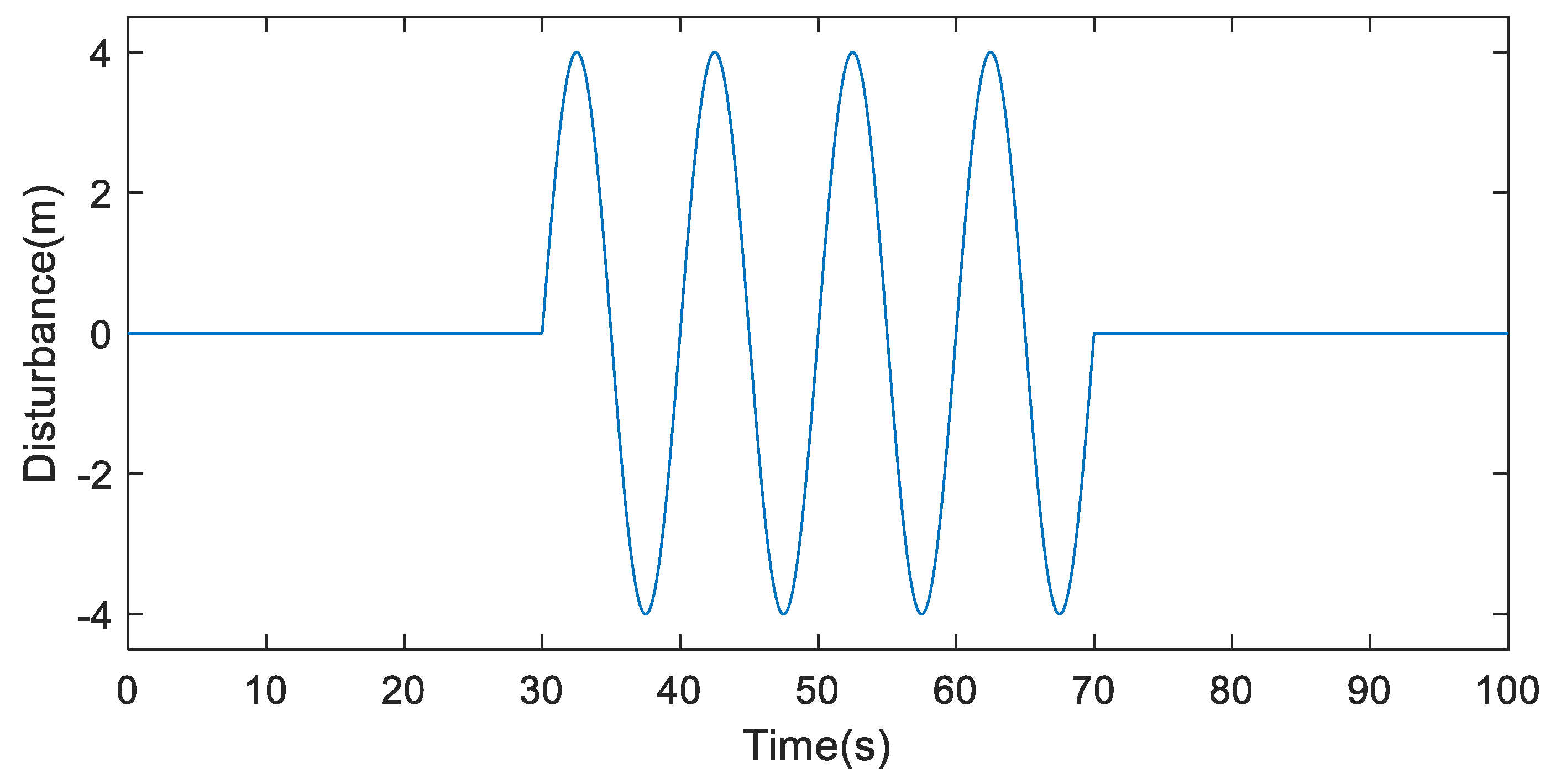
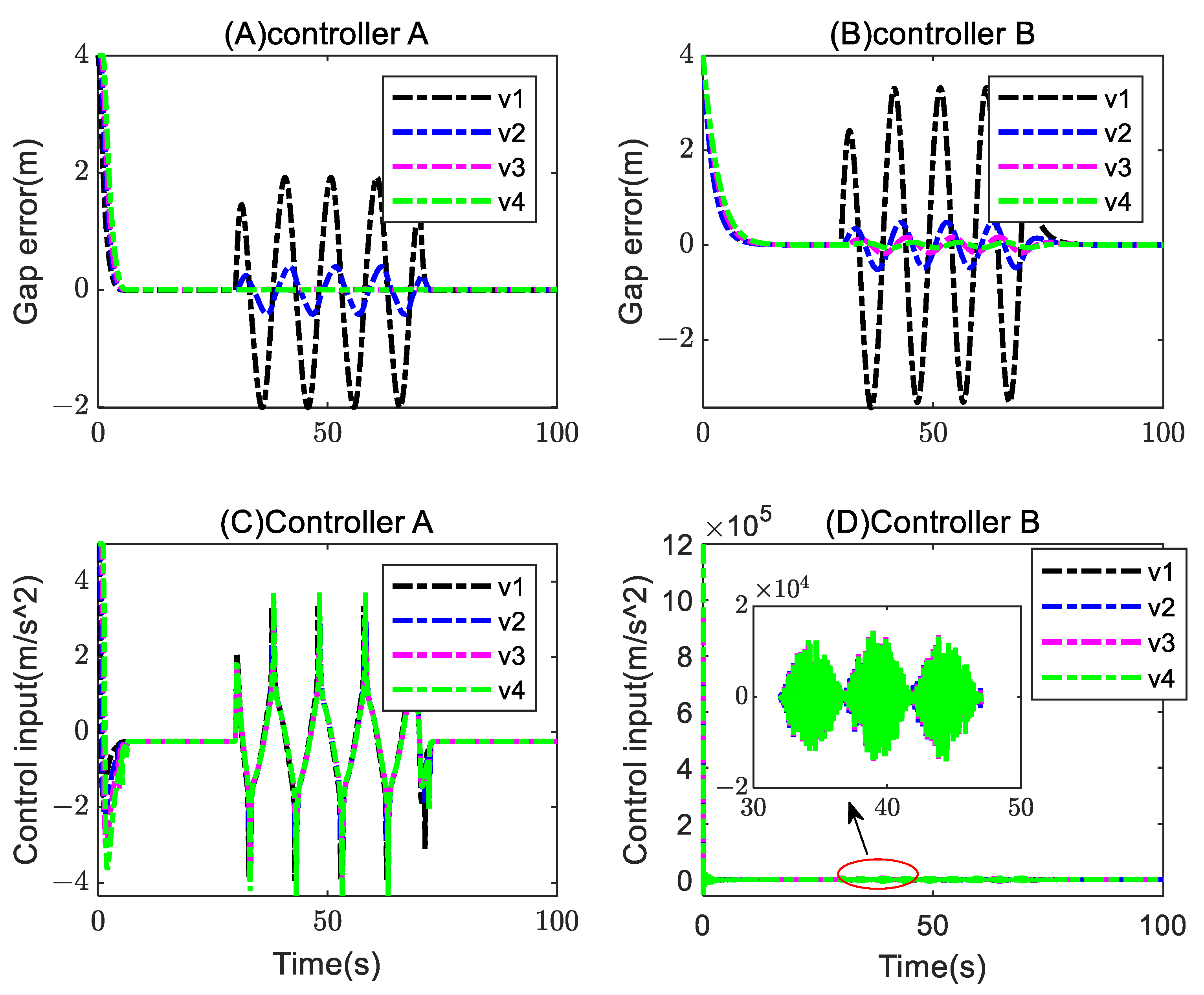
5. Simulation and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, H.; Chen, S.; Yang, L.; Zhao, Y. Optimal Path Planning and Speed Control Integration Strategy for UGVs in Static and Dynamic Environments. IEEE Trans. Veh. Technol. 2020, 69, 10619–10629. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, S.; Ren, H.; Gao, Z.; Liu, Z. Path Tracking and Handling Stability Control Strategy with Collision Avoidance for the Autonomous Vehicle Under Extreme Conditions. IEEE Trans. Veh. Technol. 2020, 69, 14602–14617. [Google Scholar] [CrossRef]
- Liu, Y.; Yao, D.; Wang, L.; Lu, S. Distributed Adaptive Fixed-Time Robust Platoon Control for Fully Heterogeneous Vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 264–274. [Google Scholar] [CrossRef]
- Mosharafian, S.; Mohammadpour Velni, J. A hybrid stochastic model predictive design approach for cooperative adaptive cruise control in connected vehicle applications. Control Eng. Pract. 2023, 130, 105383. [Google Scholar] [CrossRef]
- Wang, J.; Li, X.; Park, J.H.; Guo, G. Distributed MPC-Based String Stable Platoon Control of Networked Vehicle Systems. IEEE Trans. Intell. Transp. 2023, 24, 3078–3090. [Google Scholar] [CrossRef]
- Wiseman, Y. Autonomous vehicles. In Research Anthology on Cross-Disciplinary Designs and Applications of Automation; IGI Global: Hershey, PA, USA, 2022; pp. 878–889. [Google Scholar]
- Bian, Y.; Du, C.; Hu, M.; Li, S.E.; Liu, H.; Li, C. Fuel economy optimization for platooning vehicle swarms via distributed economic model predictive control. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2711–2723. [Google Scholar] [CrossRef]
- Wang, C.; Wang, D.; Peng, Z. Distributed Output-Feedback Control of Unmanned Container Transporter Platooning With Uncertainties and Disturbances Using Event-Triggered Mechanism. IEEE Trans. Veh. Technol. 2022, 71, 162–170. [Google Scholar] [CrossRef]
- Xiao, S.; Ge, X.; Han, Q.L.; Zhang, Y. Dynamic Event-Triggered Platooning Control of Automated Vehicles Under Random Communication Topologies and Various Spacing Policies. IEEE Trans. Cybern. 2022, 52, 11477–11490. [Google Scholar] [CrossRef]
- Ard, T.; Guo, L.; Han, J.; Jia, Y.; Vahidi, A.; Karbowski, D. Energy-efficient driving in connected corridors via minimum principle control: Vehicle-in-the-loop experimental verification in mixed fleets. IEEE Trans. Intell. Veh. 2023, 8, 1279–1291. [Google Scholar] [CrossRef]
- Yang, S.; Shladover, S.E.; Lu, X.-Y.; Ramezani, H.; Kailas, A.; Altan, O.D. A Bayesian regression analysis of truck drivers’ use of cooperative adaptive cruise control (CACC) for platooning on California highways. J. Intell. Transp. Syst. 2023, 27, 80–91. [Google Scholar] [CrossRef]
- Pirani, M.; Baldi, S.; Johansson, K.H. Impact of Network Topology on the Resilience of Vehicle Platoons. IEEE Trans. Intell. Transp. 2022, 23, 15166–15177. [Google Scholar] [CrossRef]
- Dolk, V.S.; Ploeg, J.; Heemels, W.P.M.H. Event-Triggered Control for String-Stable Vehicle Platooning. IEEE Trans. Intell. Transp. 2017, 18, 3486–3500. [Google Scholar] [CrossRef]
- Li, Y.; Tang, C.; Li, K.; He, X.; Peeta, S.; Wang, Y. Consensus-Based Cooperative Control for Multi-Platoon Under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. 2019, 20, 2220–2229. [Google Scholar] [CrossRef]
- Dunbar, W.B.; Caveney, D.S. Distributed Receding Horizon Control of Vehicle Platoons: Stability and String Stability. IEEE Trans. Autom. Control 2012, 57, 620–633. [Google Scholar] [CrossRef]
- Zhang, L.; Sun, J.; Orosz, G. Hierarchical Design of Connected Cruise Control in the Presence of Information Delays and Uncertain Vehicle Dynamics. IEEE Trans. Control Syst. Technol. 2018, 26, 139–150. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Dai, Q.; Chen, H.; Zhao, W. A Distributed Adaptive Triple-Step Nonlinear Control for a Connected Automated Vehicle Platoon With Dynamic Uncertainty. IEEE Internet Things 2020, 7, 3861–3871. [Google Scholar] [CrossRef]
- Feng, S.; Sun, H.; Zhang, Y.; Zheng, J.; Liu, H.X.; Li, L. Tube-Based Discrete Controller Design for Vehicle Platoons Subject to Disturbances and Saturation Constraints. IEEE Trans. Control Syst. Technol. 2019, 28, 1066–1073. [Google Scholar] [CrossRef]
- Guo, X.; Wang, J.; Fa Ng, L.; Teo, R. Distributed Adaptive Integrated-Sliding-Mode Controller Synthesis for String Stability of Vehicle Platoons. IEEE Trans. Intell. Transp. 2016, 17, 2419–2429. [Google Scholar] [CrossRef]
- Li, S.E.; Yang, Z.; Li, K.; Wang, J. An Overview of Vehicular Platoon Control under the Four-Component Framework. In Proceedings of the Intelligent Vehicles Symposium 2015, Seoul, Republic of Korea, 28 June–1 July 2015. [Google Scholar]
- Kaviarasan, B.; Sakthivel, R.; Wang, C.; Alzahrani, F. Resilient control design for consensus of nonlinear multi-agent systems with switching topology and randomly varying communication delays. Neurocomputing 2018, 311, 155–163. [Google Scholar] [CrossRef]
- Khoo, S.; Xie, L.; Man, Z. Robust Finite-Time Consensus Tracking Algorithm for Multirobot Systems. IEEE/ASME Trans. Mechatron. 2009, 14, 219–228. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K. String stability of interconnected systems. IEEE Trans. Autom. Control 1996, 41, 349–357. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Mechanical Engineering Series; Springer: New York, NY, USA, 2012. [Google Scholar]
- Hua, C.; Xiu, Y.; Guan, X. Adaptive Leader-Following Consensus for Second-Order Time-Varying Nonlinear Multiagent Systems. IEEE Trans. Cybern. 2017, 47, 1532–1539. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Golestani, M.; Hong, S.K. Constrained nonsingular terminal sliding mode attitude control for spacecraft: A funnel control approach. Mathematics 2023, 11, 247. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Wen, G.; Ren, W.; Chen, G. Designing distributed specified-time consensus protocols for linear multiagent systems over directed graphs. IEEE Trans. Autom. Control 2018, 64, 2945–2952. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Consensus algorithms for double-integrator dynamics. In Distributed Consensus in Multi-Vehicle Cooperative Control: Theory and Applications; Springer: London, UK, 2008; pp. 77–104. [Google Scholar]
- Li, X.; Tang, Y.; Karimi, H.R. Consensus of multi-agent systems via fully distributed event-triggered control. Automatica 2020, 116, 108898. [Google Scholar] [CrossRef]
- Di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Trans. Intell. Transp. 2014, 16, 102–112. [Google Scholar] [CrossRef]
- Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J. Robust Nonlinear Control IFAC-Affil. J. 2007, 17, 1002–1033. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 10 | 1.5 | ||
| 0.2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, J.; Gao, Z.; Guo, B. State-Feedback and Nonsmooth Controller Design for Truck Platoon Subject to Uncertainties and Disturbances. World Electr. Veh. J. 2024, 15, 251. https://doi.org/10.3390/wevj15060251
Feng J, Gao Z, Guo B. State-Feedback and Nonsmooth Controller Design for Truck Platoon Subject to Uncertainties and Disturbances. World Electric Vehicle Journal. 2024; 15(6):251. https://doi.org/10.3390/wevj15060251
Chicago/Turabian StyleFeng, Jianbo, Zepeng Gao, and Bingying Guo. 2024. "State-Feedback and Nonsmooth Controller Design for Truck Platoon Subject to Uncertainties and Disturbances" World Electric Vehicle Journal 15, no. 6: 251. https://doi.org/10.3390/wevj15060251