
Intelligent Vehicle Formation System Based on Information Interaction

Abstract
1. Introduction
2. System Design
2.1. Structure of Intelligent Vehicle Information Interaction System
2.2. System Hardware Design
2.2.1. Processor Module
2.2.2. Four-Channel Infrared Sensor Module
2.2.3. Photoelectric Speed Measurement Module
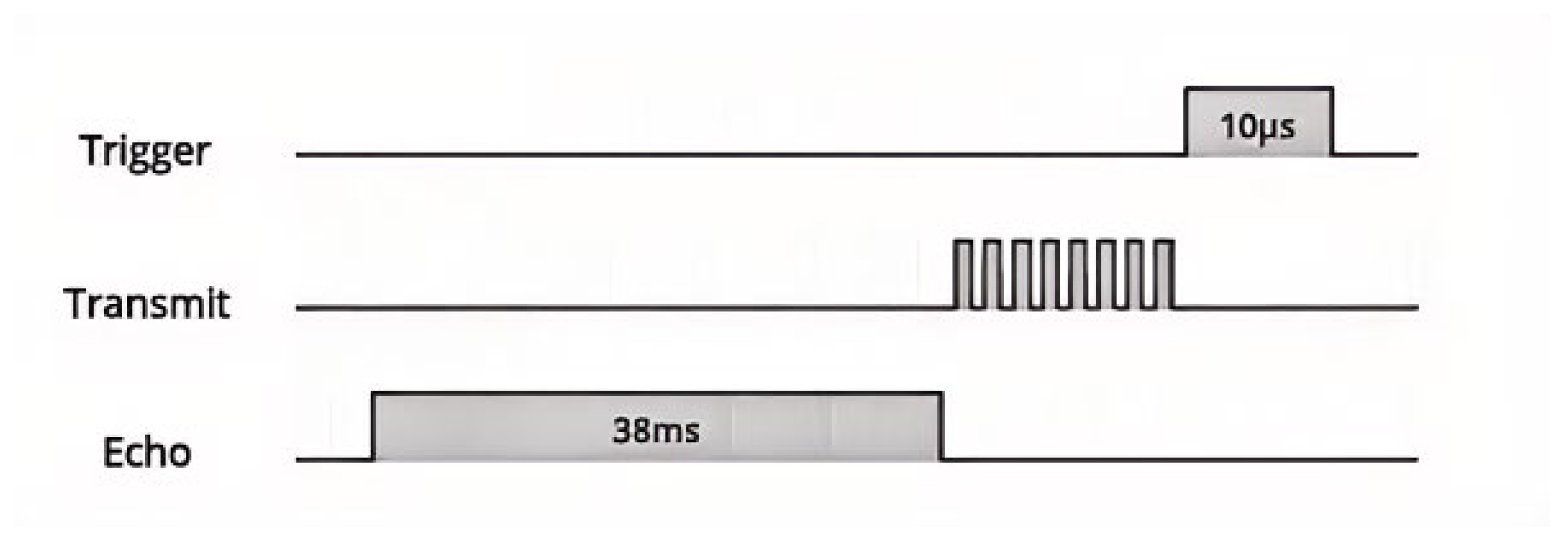
2.2.4. Ultrasonic Distance Measurement Module
2.2.5. ZigBee Communication Module
2.2.6. Bluetooth Networking Module
2.2.7. Motor Drive Module
2.3. System Software Design
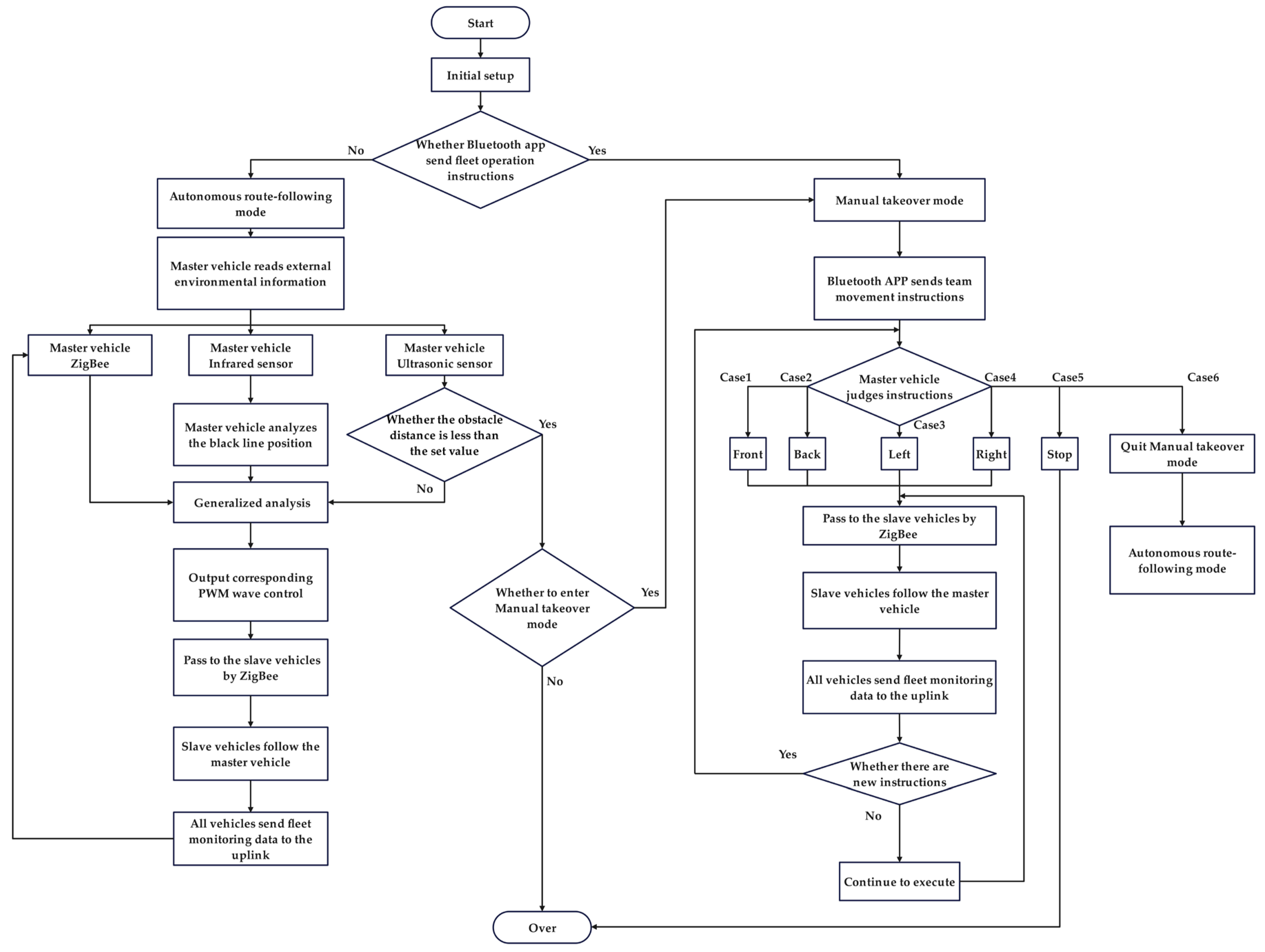
2.3.1. General Design of the System Program
2.3.2. Generalized Analysis
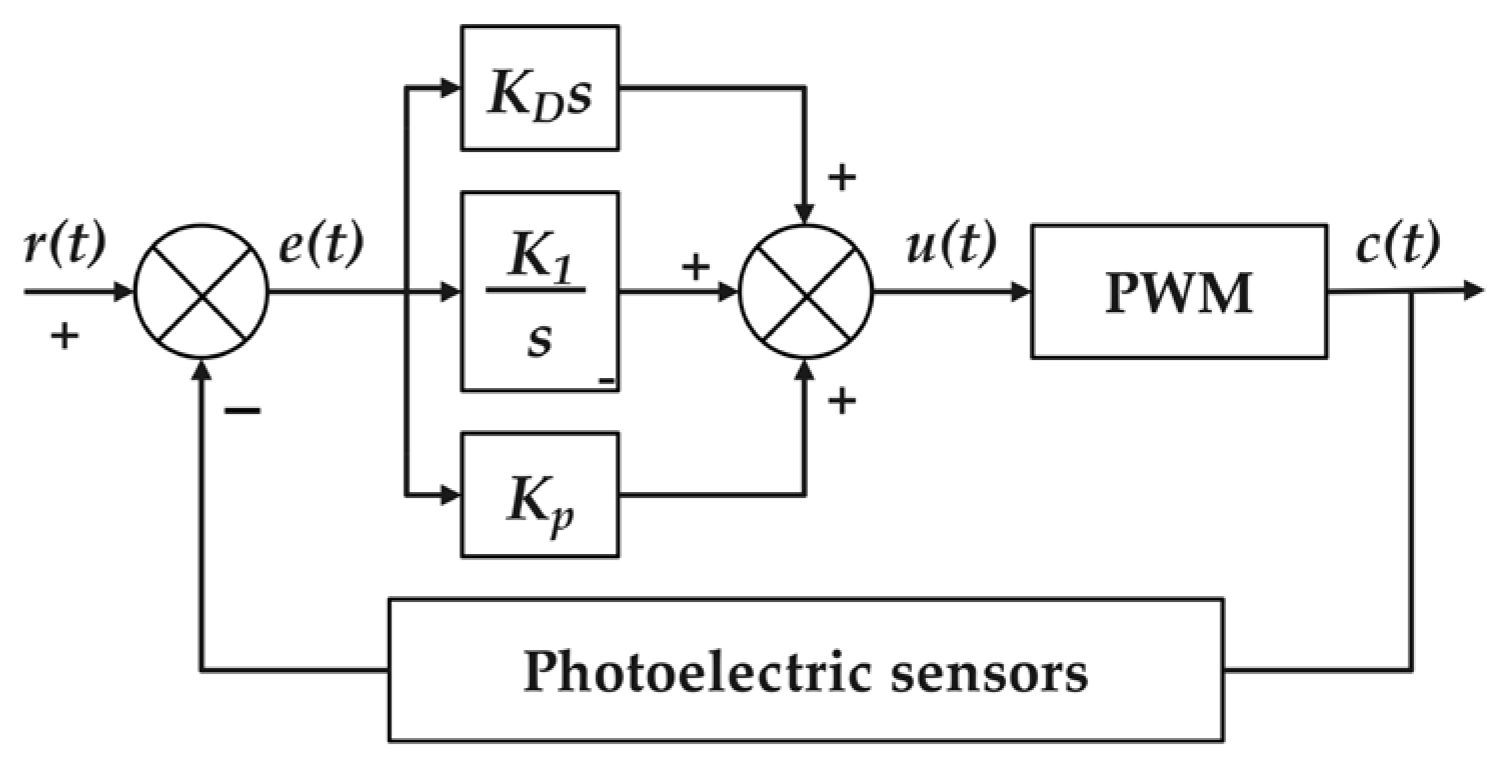
- Master vehicle speed PID controller design;
- 2.
- Fleet spacing PID controller design;
- 3.
- Vehicle following strategy.
2.3.3. Design of Bluetooth APP
3. System Test
3.1. Vehicle Formation Operation Test under a Straight Road
- To further verify the stability of this vehicle formation and the accuracy of the Zigbee communication, we designed a single-lane road experimental scenario to experiment with the PID constant spacing formation control algorithm, as shown in Figure 14.
- Three intelligent vehicles traveling in formation; the intelligent vehicles transmit state information (e.g., speed, fleet spacing, etc.) to the master vehicle through the ZigBee wireless communication network, and the master vehicle applies the PID constant spacing algorithm to control the formation, with the initial spacing and the safety spacing between the intelligent vehicles set to 20 cm, and the initial speed of the three vehicles set to zero.
- Scenario 1 (simulation of a clear road, convoy start-up to stable driving): the system is in a zero initial state, the master vehicle is started, and the slave vehicle is verified to follow the vehicle from a set initial speed to a stable following process.
- Figure 15 shows that the front vehicle starts at the zero moment, and the rear vehicle quickly responds and maintains a similar speed to the front vehicle. After about 1.2 s, the start was completed, and the convoy formed an equidistant longitudinal formation stably in a short time, while the inter-vehicle distances all stably reached the preset desired values.
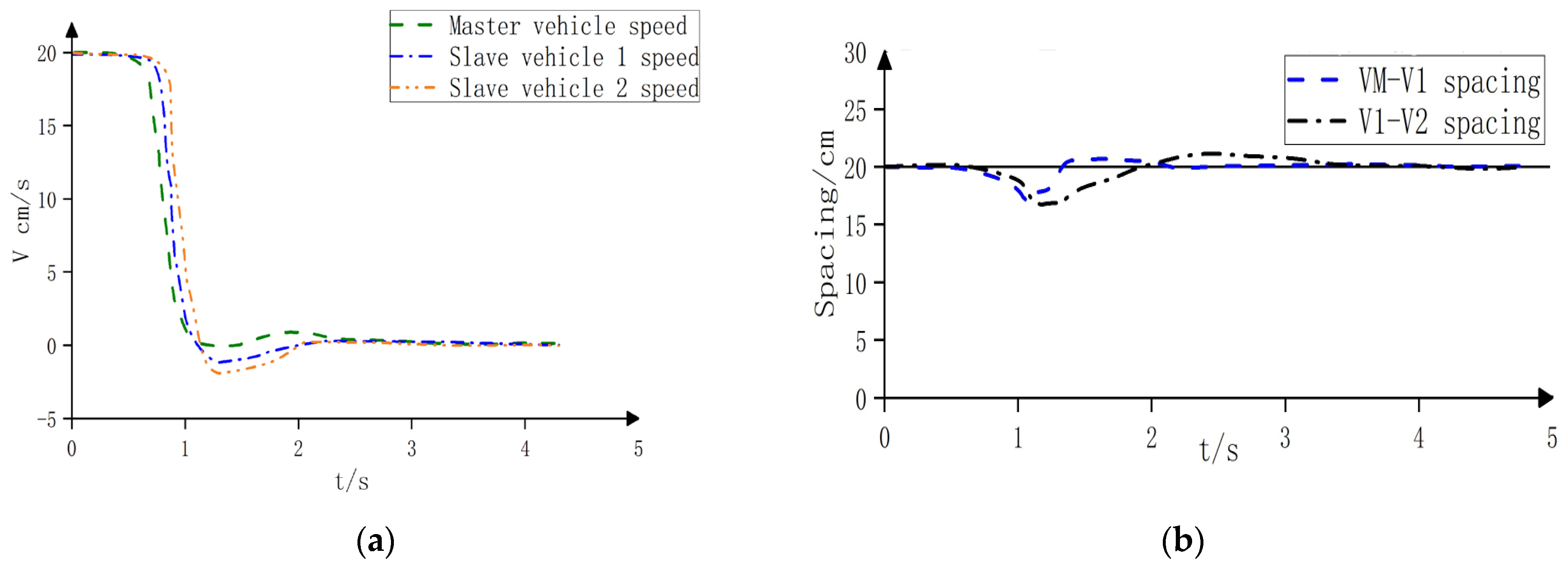
- Scenario 2: (simulated road blockage) The system is in a non-zero initial state; there is an obstacle in front of the main vehicle, and the main vehicle is emergency braking to verify the safety of the following vehicle.
- As can be seen from Figure 16, when the master vehicle stops, the speed of the master vehicle drops to zero, and the rear vehicle passes through the speed quickly and drops to zero; the overshooting amount is small, and after that, the error also decreases gradually, and finally converges to zero, and the distance between the front vehicle and the rear vehicle is always the same as the set distance to avoid the occurrence of the phenomenon of vehicle collision.
- Experiments show that the vehicle formation control system exhibits good performance under different working conditions. The system is able to adjust the speed of the slave vehicles to follow the master vehicle when the convoy is starting and driving steadily; in an emergency braking situation, the system can detect and take braking measures in time to ensure driving safety. However, the communication delay of the system may lead to transient inconsistencies in speed control, which needs to be optimized in subsequent studies.
3.2. Vehicle Formation Operation Test in Complex ROAD Conditions
- Figure 17 shows the experiment map. All the intelligent vehicles in the experiment satisfy the operation conditions, and the preset safety distance between the two workshops is 15 cm.
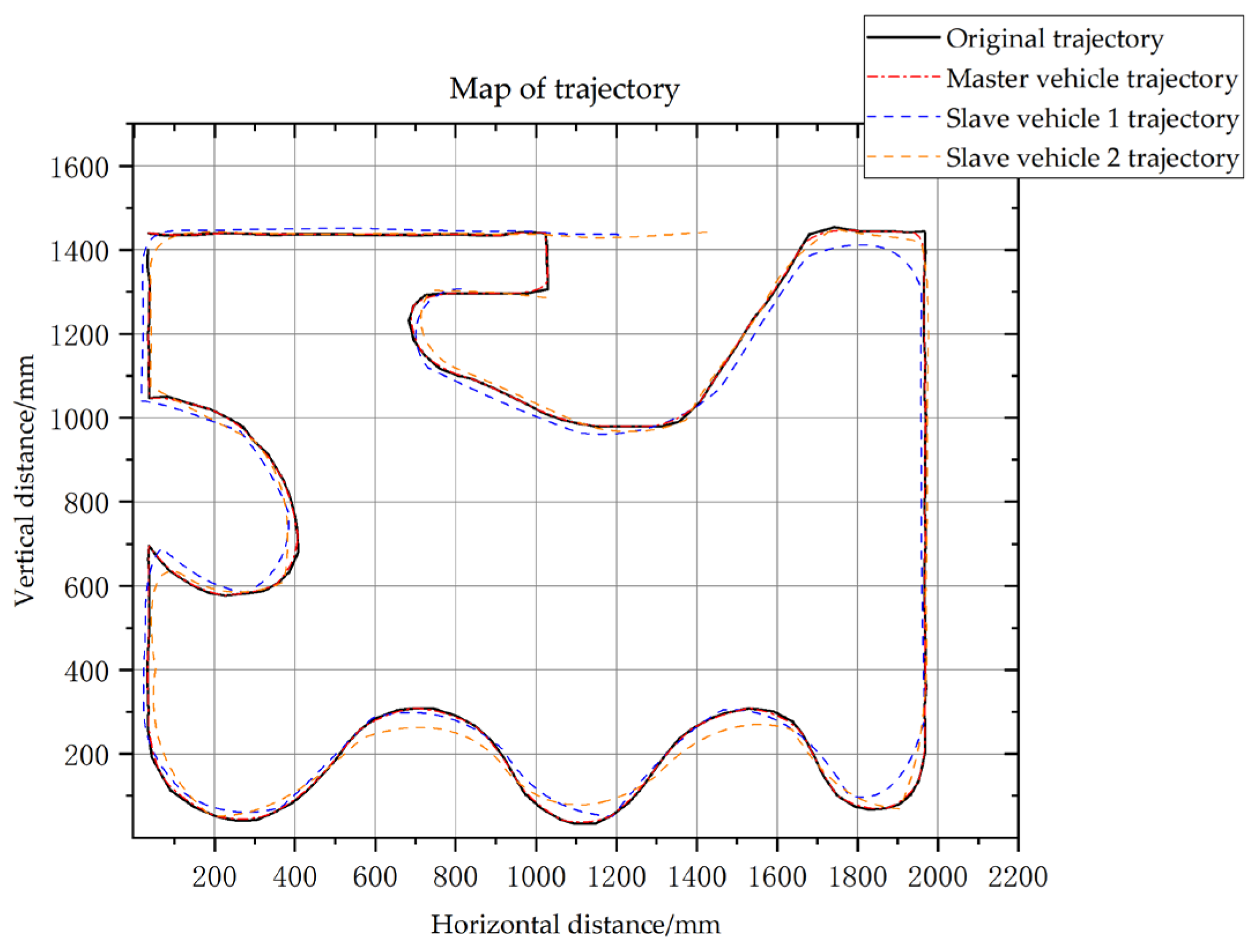
- After testing, the vehicles execute the motion instruction issued by the main control unit with very high accuracy, so the authors will extract the PWM value of the vehicle servo at each moment and redraw the trajectory diagram of the three vehicles following the line through MATLAB. First of all, the kinematic analysis of the intelligent vehicle, according to the above derivation and the parameters of the vehicle model itself, to obtain the relationship between the linear and angular velocities of the intelligent vehicle and the PWM value due to the high frequency of the motion command issued by the central control unit, so the motion parameters of the vehicle in the interval between the two commands can be considered as unchanged, and thus the trajectory of the vehicle motion can be solved for each period. The combination of all segments of the trajectory can draw out the actual trajectory of the vehicle movement.
- Figure 18 shows the coordinate position changes of the formation of intelligent vehicles during the movement process, where the horizontal and vertical axes represent different coordinate positions, respectively. The black trajectory represents the road line, the red trajectory represents the traveling path of the master vehicle, and the blue and orange trajectories represent the following path of the slave vehicles. From the figure, it can be observed that the master vehicle travels along the black roadway line, and the slave vehicles closely follow the master vehicle, and its path almost overlaps with the master vehicle’s trajectory. From the actual observation, the three intelligent vehicles eventually form a stable longitudinal formation, and the motion effect is consistent with the theoretical expectation.
4. Discussion
- In the future, driven by 5G and 6G network technologies, intelligent vehicle communications will usher in multiple research directions and innovation opportunities. At the system design level, research on self-organizing networks [28] and edge computing technologies [29] to optimize dynamic topology management and low-latency data processing to ensure that intelligent vehicles can maintain efficient and stable communication capabilities in a variety of complex environments is important. In terms of communication protocols, new low-latency protocols and multihop communication methods will [30] enhance the reliability of communication between vehicles and between vehicles and infrastructure. In addition, multimodal sensing fusion [31] and sensor network optimization research will further enhance the accuracy of intelligent vehicles’ perception of the environment and the efficiency of data transmission so that they can more accurately identify traffic conditions, changes in road conditions, and other information to make smarter driving decisions, and these innovations and improvements will comprehensively enhance the communication capability and user experience of intelligent vehicles, and promote the development of intelligent transportation systems.
- Based on intelligent network technology, internet-connected and self-driving vehicles can obtain more road information by utilizing advanced technologies (e.g., vehicle-to-vehicle communication, vehicle-to-infrastructure communication, and intelligent transportation systems). These rich communication methods provide an excellent advantage for intelligent vehicles to implement eco-driving strategies. Eco-driving strategies are an effective means to promote energy-efficient operation of intelligent vehicles by optimizing speed profiles. By collecting and analyzing traffic information (e.g., road conditions, traffic flow, traffic light signals, etc.), the vehicle control system can calculate an optimal speed change profile to drive as smoothly and efficiently as possible [32].
- The eco-driving strategy can be realized by the real-time optimization control method. Real-time optimization focuses on timely adjusting the state of the intelligent vehicle so that it consumes the least amount of energy and reduces carbon emissions. Some studies have shown that eco-driving strategies can improve a vehicle’s fuel economy by as much as 25%. In this study, PID is used to control the speed change process of the master and slave vehicles, which realizes the linear motion of the queue vehicle with a smooth change of vehicle speed and reduces unnecessary acceleration, deceleration, and stopping, thus reducing energy consumption. The practice of eco-driving helps to promote the sustainable development of the automotive industry and contributes to the building of a greener, more environmentally friendly, and sustainable society [33].
- Against the backdrop of increasing levels of intelligence, we must also think deeply about the ethical issues raised by vehicle fleet technology. In emergency situations, intelligent fleet systems must make quick decisions, for example, to protect passengers or pedestrians in the vehicle. This involves complex ethical judgments, and there are two main options for ethical decision-making: Personal Ethics Settings (PES) and Mandatory Ethics Settings (MES). Personal Ethics Setting allows the end user to control and set the vehicle’s behavior in emergencies based on personal morals and preferences. MES guides the vehicle in making decisions through predefined ethical settings without human intervention. However, it has the disadvantage that it is often difficult to make satisfactory choices in the face of complex road situations. PES and MES have advantages and disadvantages, and in the early stages, a combination of the two may be preferable. However, as the technology develops and the ethical framework improves, a gradual transition to a mature MES may be the best solution to the ethical dilemma. In the meantime, national laws should clearly define the responsible parties for accidents in such situations to ensure clarity and fairness in the attribution of responsibility. For data privacy, strict data protection regulations must be established to ensure the security and privacy of public information and to create a safe and trustworthy intelligent transportation environment for the public. These measures represent a prudent application of technology and a responsible attitude toward public safety and enhance public confidence in intelligent transportation technology.
- In summary, realizing fully unmanned control of intelligent vehicle queues requires the joint efforts of the government, enterprises, research institutions, and the public. The government should provide policy support, enterprises should promote technology and applications, research organizations should provide technical support, and the public should actively participate and provide feedback. By building a cooperative ecology, we can work together to promote the development of autonomous driving technology.
5. Conclusions
- In this paper, the hardware platform of the intelligent vehicle system and the software platform of the ZigBee network were established, and according to the requirements of the multi-intelligent vehicles following control system, the multi-sensor intelligent vehicle integrating Arduino as the core controller, processor module, four-channel infrared sensor module, photoelectric speed measurement module, ultrasonic distance measurement module, Bluetooth networking module, motor drive module, and the ZigBee communication used for the communication of intelligent vehicle workshop was established.
- For the following problem in the multi-intelligent vehicles following control system, we constructed the tracking direction mechanism based on ultrasonic waves, designed the PID algorithm of a multi-intelligent vehicle following control, obtained the control method that can ensure the asymptotic stability of the system, obtained the real-time state information of all the intelligent vehicles through the monitoring platform on the mobile phone end, and monitored the motion state of the intelligent vehicles in real-time. The experimental results show that the control system designed in this paper achieves the desired control effect.
- Due to the limitations of the design cycle and the current experimental conditions, some improvements still need to be made to this system. In this paper, we only briefly discuss the following problem of multi-intelligent vehicles. The experimental results show that the vehicle formation control system exhibits a good performance on straight roads. However, in the curved road section, our algorithm of using ultrasonic technology to assist direction correction, simplifying the complex road condition into straight road processing, applying the PID control strategy to keep the distance between the vehicles, and the phenomenon of convoy jitter can be observed, proving that our strategy still needs improvement. To improve the control effect and enhance the robustness of the vehicle following system, we plan to implement a more accurate following control strategy in future work. This system relies on the commands and states of the main vehicle, which constitutes a significant weakness. Once the main vehicle fails or the communication is interrupted, the whole formation may be in chaos or even unable to continue traveling. To solve this problem, more advanced synchronization control algorithms, such as time-based synchronization or distributed coherence control algorithms, can be introduced to reduce the dependence on the main vehicle. On the other hand, the scalability of the system is also limited. As the number of vehicles in the formation increases, communication delay and synchronization complexities rise dramatically. In addition, the research in this paper mainly focused on the longitudinal control of the vehicle following the system. However, lateral movements such as lane changing and steering are unavoidable during vehicle traveling. Therefore, the longitudinal and lateral coupling problem of vehicles will be the focus of the next research.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, L.; Zhao, X.; Wu, G.; Xu, Z.; Matthew, B.; Hui, F.; Hao, P.; Han, M.; Zhao, Z.; Fang, S.; et al. Review on connected and automated vehicles based cooperative eco-driving strategies. J. Traffic Transp. Eng. 2020, 20, 58–72. [Google Scholar]
- Xuan, J.Y.; Lu, G.; Wang, J.C. Vehicle following control system based on micro smart car. Inf. Control 2014, 43, 165–170. [Google Scholar]
- Yang, L. Design and Platform Implementation of Networked Following Control for Multi-Intelligent Car. Master’s Thesis, Shanxi University, Taiyuan, China, 1 June 2019. [Google Scholar]
- Alberto, B. Automatic Vehicle Guidance: The Experience of the ARGO Autonomous Vehicle; World Scientific: Singapore, 2023. [Google Scholar]
- Stentz, T.; Kelly, A.; Herman, H.; Rander, P.; Amidi, O.; Mandelbaum, R. Integrated Air/Ground Vehicle System for Semi-Autonomous Off-Road Navigation. In Proceedings of the AUVSI Symposium, Pittsburgh, PA, USA, 9–11 July 2002. [Google Scholar]
- Xu, C.Y.; Wang, B.R.; Ji, S.W. Study on View Field and Image Rectifying for Intelligent Vehicle. Gonglu Jiaotong Keji 2000, 5, 76–80. [Google Scholar]
- Hong, J.L.; Gao, B.Z.; Dong, S.Y.; Cheng, Y.F. Key Problems and Research Progress of Energy Saving Optimization for Intelligent Connected Vehicles. China J. Highw. Transp. 2021, 34, 304–336. [Google Scholar]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Intell. Transp. Syst. Conf. 2015, 17, 491–509. [Google Scholar] [CrossRef]
- Xu, Q.; Mak, T.; Ko, J.; Sengupta, R. Vehicle-to-vehicle safety messaging in DSRC. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, 1st ed.; Ken, L., Ed.; Association for Computing Machinery: New York, NY, USA, 2004; pp. 19–28. [Google Scholar]
- Xing, H.H.; Xu, Y.; Jiang, X.J.; Fu, Y.K. Research on Application of 5G Communication Technology in Intelligent Transportation System. Transp. Energy Conserv. Environ. Prot. 2023, 19, 120–126. [Google Scholar]
- Chen, X. Leader-Follower Formation Control of Mobile Robots with Prescribed Performance Guarantees. Master’s Thesis, South China University of Technology, Guangzhou, China, 18 April 2019. [Google Scholar]
- Xu, D. Research on Formation Control of Multi-Mobile Unmanned Vehicle Based on WSN. Master’s Thesis, Xi’an Technological University, Xi’an, China, 15 May 2018. [Google Scholar]
- Lin, Z.; Ding, W.; Yan, G.; Yu, C.; Giua, A. Leader-follower formationvia complex Laplacia. Automatica 2013, 49, 1900–1906. [Google Scholar] [CrossRef]
- Han, L. Research on Vehicle Formation Control Based on Robust Adaptivecontrol Algorithm. Master’s Thesis, Beijing Jiaotong University, Beijing, China, March 2015. [Google Scholar]
- Li, R.M.; Wei, L.Z. A control method of unmanned car following under time-varying relative distance and angle. Acta Autom. Sin. 2018, 44, 2031–2040. [Google Scholar]
- Deng, G.C. Research on Multi Vehicle Cooperative Control Technology of Unmanned. Master’s Thesis, University of Jinan, Jinan, China, 29 May 2022. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic Flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Zhao, Q.; Zheng, H. Safety spacing control of truck platoon based on emergency braking under different road conditions. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 7, 69–71. [Google Scholar] [CrossRef]
- Maxim, A.; Lazar, C.; Caruntu, C.F. Caruntu Distributed model predictive control algorithm with communication delays for a cooperative adaptive cruise control vehicle platoon. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation, Saint-Raphaël, France, 15–18 September 2020. [Google Scholar]
- Zhao, D.; Dai, Y.; Zhang, Z. Computational Intelligence in Urban Traffic Signal Control: A Survey. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2012, 42, 485–494. [Google Scholar] [CrossRef]
- Akopov, A.S.; Beklaryan, L.A. Traffic Improvement in Manhattan Road Networks with the Use of Parallel Hybrid Biobjective Genetic Algorithm. IEEE Access 2024, 2, 19532–19552. [Google Scholar] [CrossRef]
- Tang, L.; Huang, W.; You, J. The Design of the Intelligent Car Based on the Arduino UNO and Lab VIEW. J. Phys. Conf. Ser. 2019, 1288, 012071. [Google Scholar] [CrossRef]
- Wang, K.; Jiang, F.C. Research on Cooperation Control of Multi—Communication Intelligent Vehicle Platoon. Bull. Sci. Technol. 2020, 36, 40–43. [Google Scholar]
- Lv, Z.C. Arduino Programming Foundation, 2nd ed.; Beihang University Press: Beijing, China, 2014. [Google Scholar]
- Cheng, C. Arduino Development Guide (AVR); China Machine Press: Beijing, China, 2012. [Google Scholar]
- Peng, Y. LabVIEW Virtual Instrument Design and Analysis; Tsinghua University Press: Beijing, China, 2011. [Google Scholar]
- Shen, J. Arduino and LabVIEW Development Combat; China Machine Press: Beijing, China, 2014. [Google Scholar]
- Liu, Y.M.; Li, X.; Ji, H. Key technology of network self-organization in 5G ultra-dense scenario. Telecommun. Sci. 2016, 32, 44–51. [Google Scholar]
- Najmul, H.; Yau, K.-L.A.; Wu, C. Edge computing in 5G: A review. IEEE Access 2019, 7, 127276–127289. [Google Scholar]
- Sarma, S.S.; Hazra, R.; Chong, P.H.J. Performance Analysis of DF Relay-Assisted D2D Communication in a 5G mm Wave Network. Future Internet 2022, 14, 101. [Google Scholar] [CrossRef]
- Wang, Y.; Ning, W.; Zhang, S.; Yu, H.; Cen, H.; Wang, S. Architecture and key terminal technologies of 5G-based internet of vehicles. Comput. Electr. Eng. 2021, 95, 107430. [Google Scholar] [CrossRef]
- Yang, J.; Zhao, D.; Jiang, J.; Lan, J.; Mason, B.; Tian, D.; Li, L. A Less-Disturbed Ecological Driving Strategy for Connected and Automated Vehicles. IEEE Trans. Intell. Veh. 2021, 8, 413–424. [Google Scholar] [CrossRef]
- Zhou, M.; Jin, H.; Wang, W. A review of vehicle fuel consumption models to evaluate eco-driving and eco-routing. Transp. Res. D Transp. Environ. 2016, 49, 203–218. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LS [1] | LS [2] | RS [1] | RS [2] | Motion State |
|---|---|---|---|---|
| 0 | 0 | 1 | 0 | Turn right slightly |
| 0 | 1 | 0 | 0 | Turn left slightly |
| 0 | 0 | 1 | 1 | Turn right |
| 1 | 1 | 0 | 0 | Turn left |
| 0 | 0 | 0 | 1 | Turn right sharply |
| 1 | 0 | 0 | 0 | Turn left sharply |
| 0 | 1 | 1 | 0 | Go straight |
| |v|(cm/s) |w|(rad/s) | (Left/Right Motor) PWM | Command | ||
|---|---|---|---|---|
| 20 | 0 | 150 | 150 | Go ahead |
| 2.1 | 5.46 | 210 | −180 | Turn right |
| 2.1 | 5.46 | −180 | 210 | Turn left |
| 13.6 | 0 | −90 | −90 | Go back |
| 0 | 0 | 0 | 0 | Stop |
| 8.4 | 0.8 | 90 | 150 | Narrow left |
| 8.4 | 0.8 | 150 | 90 | Narrow right |
| 0 | 5.87 | −210 | 210 | Sharp left |
| 0 | 5.87 | 210 | −210 | Sharp right |
| Button | Instruction | Function |
|---|---|---|
| Go ahead | 1 | Control the vehicle forward movement |
| Turn right | 2 | Control the vehicle to turn right |
| Turn left | 3 | Control the vehicle to turn left |
| Go back | 4 | Control the vehicle to move backwards |
| Stop | 5 | Control the vehicle stop |
| Automatic routing | 10 | Autonomous command |
| Manual takeover | 11 | Remote command |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Ouyang, T.; Zhao, S.; Wang, X.; Ni, Z.; Fan, Y. Intelligent Vehicle Formation System Based on Information Interaction. World Electr. Veh. J. 2024, 15, 252. https://doi.org/10.3390/wevj15060252
Wang P, Ouyang T, Zhao S, Wang X, Ni Z, Fan Y. Intelligent Vehicle Formation System Based on Information Interaction. World Electric Vehicle Journal. 2024; 15(6):252. https://doi.org/10.3390/wevj15060252
Chicago/Turabian StyleWang, Peng, Tao Ouyang, Shixin Zhao, Xuelin Wang, Zhewen Ni, and Yuezhen Fan. 2024. "Intelligent Vehicle Formation System Based on Information Interaction" World Electric Vehicle Journal 15, no. 6: 252. https://doi.org/10.3390/wevj15060252
APA StyleWang, P., Ouyang, T., Zhao, S., Wang, X., Ni, Z., & Fan, Y. (2024). Intelligent Vehicle Formation System Based on Information Interaction. World Electric Vehicle Journal, 15(6), 252. https://doi.org/10.3390/wevj15060252