
A Study on an Energy-Regenerative Braking Model Using Supercapacitors and DC Motors
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Literature Review
2.1. Supercapacitors
2.2. DC Motor Dynamic Braking
2.3. Power Electronics
2.4. Application of Regenerative Braking in Cars
3. Methodology
3.1. Experimental Model
3.1.1. Experimental Design Overview
3.1.2. Experimental Circuit Design
3.1.3. Experimental Circuit Construction
3.2. Arduino Programming
3.3. Numerical Model in Simulink
3.4. Validation Calculations
4. Results and Discussion
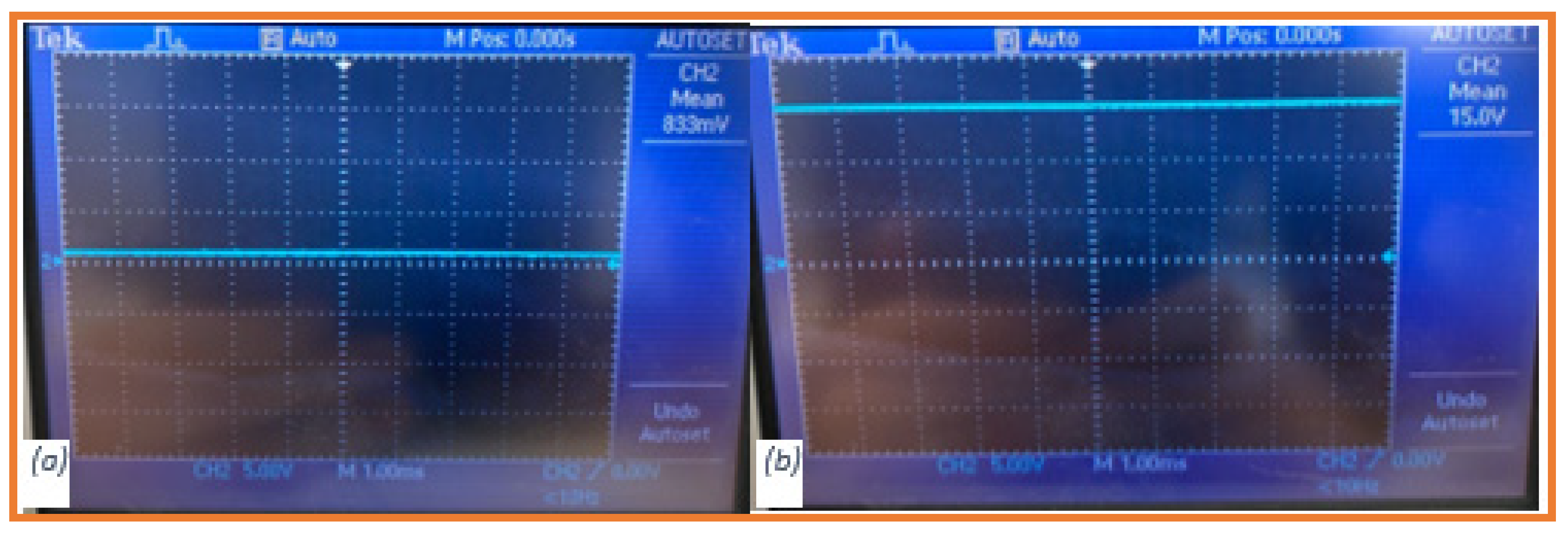
4.1. Current and Voltage Testing
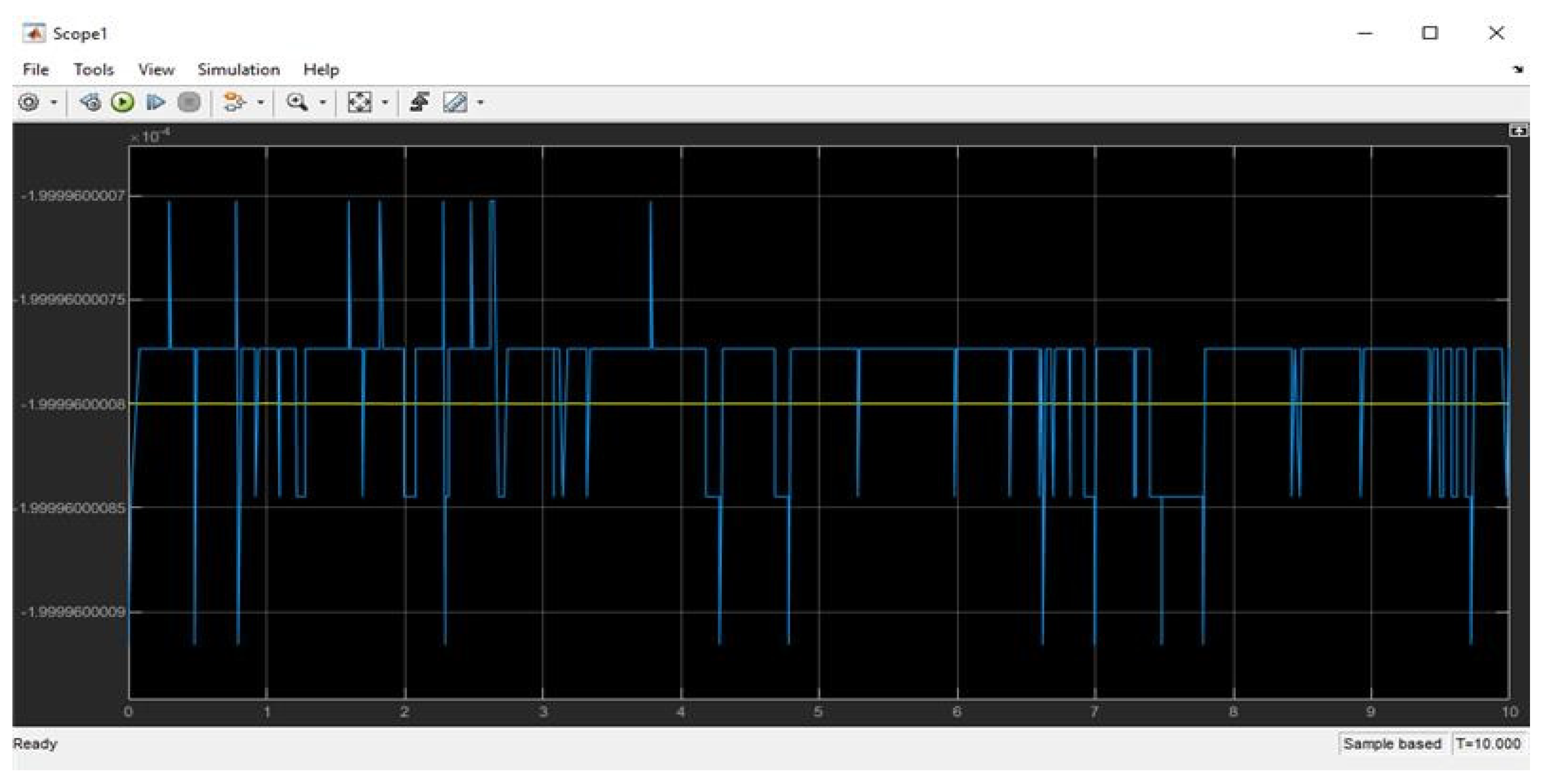
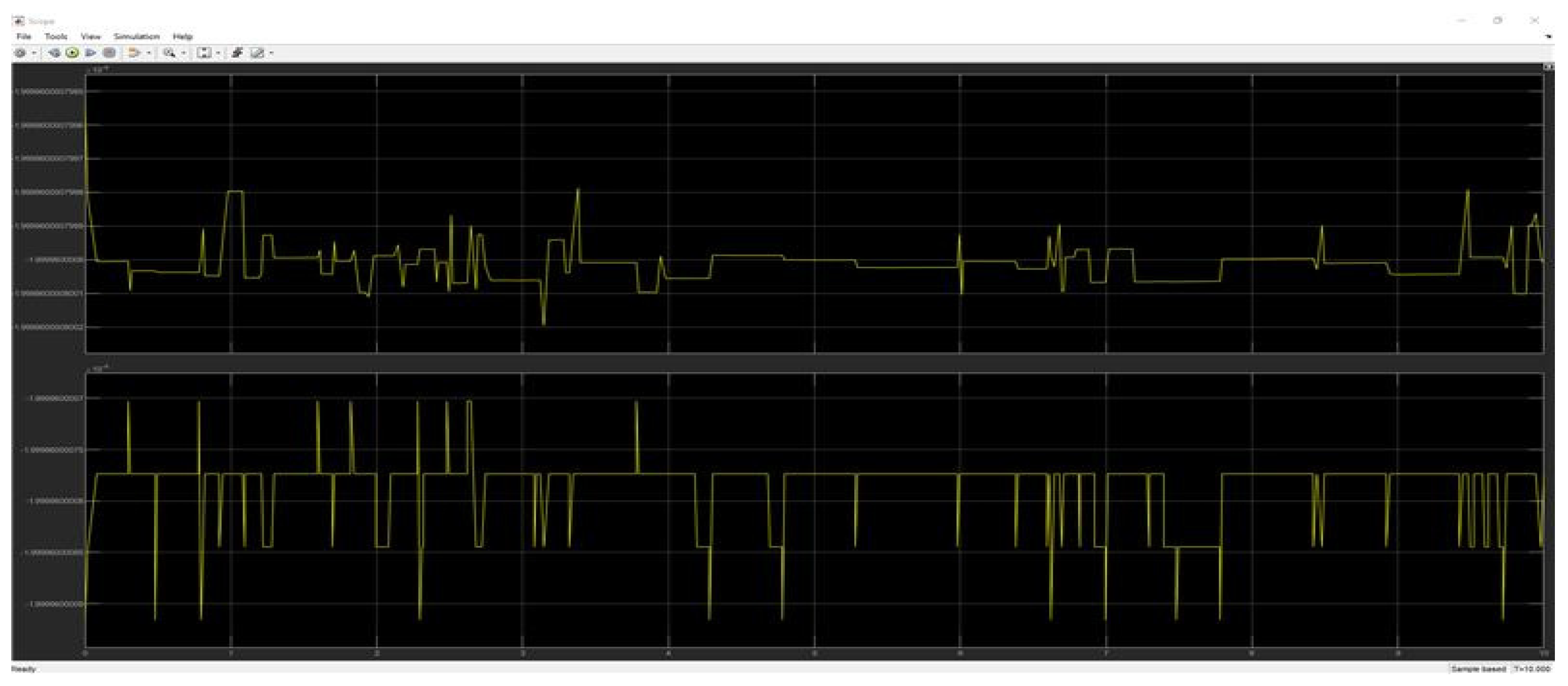
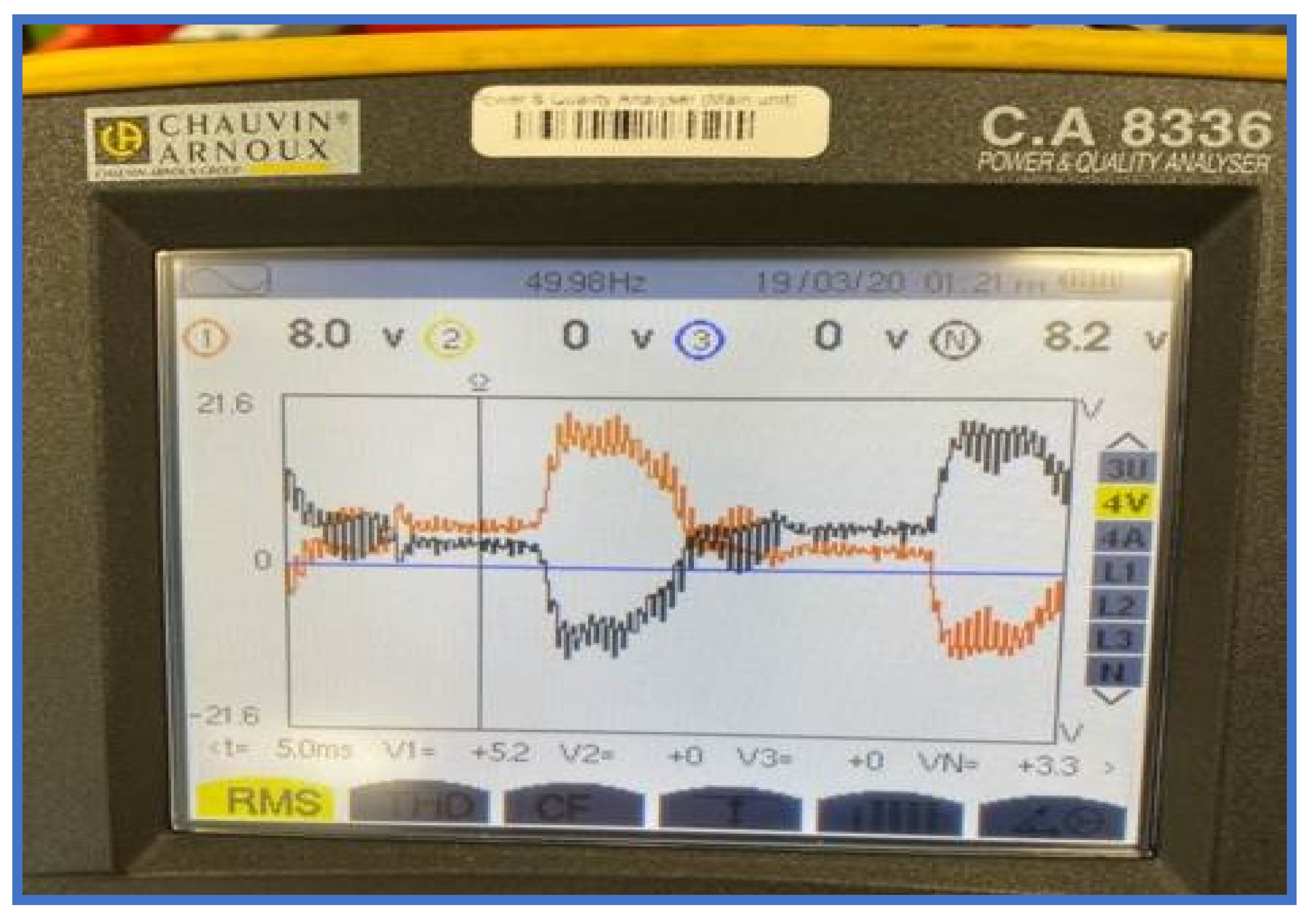
4.2. Waveform Testing
4.3. Charging and Discharge Voltages
- Efficient deceleration is achieved through regenerative braking, but for total stopping force, especially in emergency situations or at low speeds, conventional friction brakes are usually required as well.
- The seamless transition between regenerative and friction braking is achieved by the application of advanced control algorithms, which further improve driving safety and comfort.
- Although energy capture efficiency can vary, the result is that EVs will be able to travel farther between charges as a large amount of their kinetic energy can be recovered and used.
- The battery’s capacity to swiftly and effectively accept and store the regenerated energy has an impact on how successful energy recovery is achieved. The combination of a supercapacitor with a battery makes this even more efficient.
- Contemporary electric vehicles (EVs) employ advanced electronic control units (ECUs) to regulate the regenerative braking mechanism, maximizing energy recovery while preserving the vehicle’s stability and control [57].
- Further work could be carried out using neural networks and machine learning methods to optimize the regenerative braking system for EVs (see [35,68]). Also, more work could be done on EV stability and torque control, as different authors consider a range of parameters in their design [69,70,71,72,73,74,75,76,77,78,79]. Lastly, future works could consider the regenerative braking systems for other EVs, plug-in hybrid electric vehicles (PHEVs) and hybrid electric vehicles (HEVs).
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schafer, D.; Lamantia, M.; Chen, P. Modeling and Spacing Control for an Electric Vehicle with One-Pedal-Driving Feature. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 166–171. [Google Scholar] [CrossRef]
- Adelusi, I.; Amaechi, C.V.; Andrieux, F.; Dawson, R. Multiphysics simulation of added carbon particles within fluidized bed anode zinc-electrode. Eng. Res. Express J. ERX 2020, 2, 025014. [Google Scholar] [CrossRef]
- Adelusi, I.; Amaechi, C.V.; Andrieux, F.; Dawson, R. Practical Development of a ZnBr2 Flow Battery with a Fluidized Bed Anode Zinc-Electrode. J. Electrochem. Soc. 2020, 167, 050504. [Google Scholar] [CrossRef]
- Leis-Pretto, J. Regenerative Braking. 2017. Submitted on November 8, 2017 as PH240 coursework, Stanford University, Fall 2017. Available online: http://large.stanford.edu/courses/2017/ph240/leis-pretto1/ (accessed on 15 July 2024).
- EERE. Electric Car Safety, Maintenance, and Battery Life. 2020. Energy Efficiency & Renewable Energy (EERE), U.S. Department of Energy. Available online: https://www.energy.gov/eere/electricvehicles/electric-car-safety-maintenance-and-battery-life (accessed on 20 March 2020).
- AFDC. Maintenance and Safety of Electric Vehicles. 2024. Alternative Fuel Data Center (AFDC), U.S. Department of Energy. Available online: https://afdc.energy.gov/vehicles/electric-maintenance (accessed on 15 July 2024).
- Liang, J.; Wang, F.; Feng, J.; Zhao, M.; Fang, R.; Pi, D.; Yin, G. A hierarchical control of independently driven electric vehicles considering handling stability and energy conservation. IEEE Trans. Intell. Veh. 2023, 9, 738–751. [Google Scholar] [CrossRef]
- Boretti, A.A. Improvements of vehicle fuel economy using mechanical regenerative braking. Int. J. Veh. Des. 2011, 55, 35–48. [Google Scholar] [CrossRef]
- Jo, J.; Ko, J.; Yeo, H.; Yeo, T.; Hwang, S.; Kim, H. Cooperative regenerative braking control algorithm for an automatic transmission-based hybrid electric vehicle during a downshift. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 457–467. [Google Scholar] [CrossRef]
- Bai, Z.-F.; Cao, B.-G.; Li, S.-X.; Kang, L.-Y. Simulation on H∞ robust control for regenerative braking of electric vehicle. J. Syst. Simul. 2005, 17, 2975–2978. [Google Scholar]
- Ye, M.; Jiao, S.; Cao, B. Energy recovery for the main and auxiliary sources of electric vehicles. Energies 2010, 3, 1673–1690. [Google Scholar] [CrossRef]
- Yin, G.; Jin, X. Cooperative control of regenerative braking and antilock braking for a hybrid electric vehicle. Math. Probl. Eng. 2013, 2013, 9. [Google Scholar] [CrossRef]
- Zhou, M.; Bi, S.; Dong, C.; He, C. Regenerative braking system for electric vehicles based on genetic algorithm fuzzy logic control. ICIC Express Lett. Part B Appl. 2014, 5, 689–695. [Google Scholar]
- Jansen, S.; Alirezaei, M.; Kanarachos, S. Adaptive regenerative braking for electric vehicles with an electric motor at the front axle using the state dependent riccati equation control technique. WSEAS Trans. Syst. Control 2014, 9, 424–437. [Google Scholar]
- Chuang, H.-S.; Chuang, Y.-C.; Chen, C.-Y. Development of two-quadrant PMDC motor drives with regenerative braking on electric vehicles. ICIC Express Lett. 2011, 5, 3321–3328. [Google Scholar] [CrossRef]
- Su, Y.X.; Zheng, C.H.; Duan, B.Y. Automatic disturbances rejection controller for precise motion control of permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 2005, 52, 814–823. [Google Scholar] [CrossRef]
- Yu, T.; Tong, J.P. Auto disturbance rejection control of microturbine system. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Han, J.Q. Auto disturbances rejection control technique. Front. Sci. 2007, 1, 24–31. (In Chinese) [Google Scholar]
- Abdi, H.; Bahrami, H.; Mirtalaei, S.M.M. Simplified design and optimization of slotless brushless DC machine for micro-satellites electro-mechanical batteries. J. Electr. Eng. Technol. 2013, 8, 124–129. [Google Scholar] [CrossRef]
- Wu, H.-X.; Cheng, S.-K.; Cui, S.-M. A controller of brushless DC motor for electric vehicle. IEEE Trans. Magn. 2005, 41, 509–513. [Google Scholar] [CrossRef]
- Wen, J.P.; Zhang, C.W. Research on modeling and control of regenerative braking for brushless DC machines driven electric vehicles. Math. Probl. Eng. 2015, 2015, 1–6. [Google Scholar] [CrossRef]
- Mohammad, A.; Khan, M.Z.R. BLDC motor controller for Regenerative Braking. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 21–23 May 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, M.; Jhou, H.; Ma, B.; Shyu, K. A Cost-Effective Method of Electric Brake with Energy Regeneration for Electric Vehicles. IEEE Trans. Ind. Electron. 2009, 56, 2203–2212. [Google Scholar] [CrossRef]
- Du, J.; Chen, J.; Gao, M.; Wang, J. Energy efficiency-oriented design method of power management strategy for range-extended electric vehicles. Math. Probl. Eng. 2016, 2016, 1–9. [Google Scholar] [CrossRef]
- Qiu, C.; Wang, G. New evaluation methodology of regenerative braking contribution to energy efficiency improvement of electric vehicles. Energy Convers. Manag. 2016, 119, 389–398. [Google Scholar] [CrossRef]
- Kumar, C.N.; Subramanian, S.C. Cooperative control of regenerative braking and friction braking for a hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 103–116. [Google Scholar] [CrossRef]
- Kwon, H.; Park, J.H.; Gwak, G.S.; Huh, J.W.; Choi, H.K.; Hwang, S.H. Cooperative control for friction and regenerative braking systems considering dynamic characteristic and temperature condition. Int. J. Automot. Technol. 2016, 17, 437–446. [Google Scholar] [CrossRef]
- Li, W.; Du, H.; Li, W. A new torque distribution strategy for blended anti-lock braking systems of electric vehicles based on road conditions and driver’s intentions. SAE Int. J. Passeng. Cars—Mech. Syst. 2016, 9, 107–115. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, S.; Ye, Y.; Yu, M.; Wang, G. Composite braking AMT shift strategy for extended-range heavy commercial electric vehicle based on LHMM/ANFIS braking intention identification. Clust. Comput. 2018, 22, 8513–8528. [Google Scholar] [CrossRef]
- Li, W.; Du, H.; Li, W. Driver intention based coordinate control of regenerative and plugging braking for electric vehicles with in-wheel PMSMs. IET Intell. Transp. Syst. 2018, 12, 1300–1311. [Google Scholar] [CrossRef]
- Hirose, T.; Taniguchi, T.; Hatano, T.; Takahashi, K.; Tanaka, N. A study on the effect of brake assist systems (BAS). SAE Int. J. Passeng. Cars—Mech. Syst. 2009, 1, 729–735. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, W.; Yang, Y.; Chen, W. Online energy management of plug-in hybrid electric vehicles for prolongation of all electric range based on dynamic programming. Math. Probl. Eng. 2015, 2015, 1–11. [Google Scholar] [CrossRef]
- Xi, L.; Zhang, X.; Sun, C.; Wang, Z.; Hou, X.; Zhang, J. Intelligent energy management control for extended range electric vehicles based on dynamic programming and neural network. Energies 2017, 10, 1871. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Huaji, W.; Wang, H.; Cao, D. Recognizing Driver Braking Intention with Vehicle Data Using Unsupervised Learning Methods; SAE Technical Papers 2017-01-0433; SAE: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Liang, J.; Feng, J.; Fang, Z.; Lu, Y.; Yin, G.; Mao, X.; Wu, J.; Wang, F. An Energy-Oriented Torque-Vector Control Framework for Distributed Drive Electric Vehicles. IEEE Trans. Transp. Electrif. 2023, 9, 4014–4031. [Google Scholar] [CrossRef]
- Partridge, J.; Abouelamaimen, D.I. The Role of Supercapacitors in Regenerative Braking Systems. Energies 2019, 12, 2683. [Google Scholar] [CrossRef]
- Andrew Burke, H.Z. Applications of Supercapacitors in Electric and Hybrid Vehicles. 2015. Available online: https://steps.ucdavis.edu/wp-content/uploads/2017/05/2015-UCD-ITS-RR-15-09-1.pdf (accessed on 11 April 2020).
- Dixon, J.W. Regenerative Braking for an Electric Vehicle Using Ultracapacitors and a Buck-Boost Converter. 2019. Available online: https://pdfs.semanticscholar.org/c8dc/f4d7c83f099d9e563c8c37596e06b181d264.pdf (accessed on 2 March 2020).
- Mao, S. Looking Closer at Smoothing Capacitors in Electric Vehicles. 2019. Available online: https://blog.knowlescapacitors.com/blog/looking-closer-at-smoothing-capacitors-in-electric-vehicles (accessed on 4 March 2020).
- Electronics Tutorials. Ultracapacitors. 2020. Available online: https://www.electronics-tutorials.ws/wp-content/uploads/2018/05/capacitor-cap50.gif (accessed on 4 March 2020).
- Csanyi, E. Two Basic Methods for Braking a Motor (DC Injection and Dynamic Braking). Published on 18th April, 2016. Electrical Engineering Portal (EEP). 2016. Available online: https://electrical-engineering-portal.com/methods-braking-motor (accessed on 11 April 2020).
- Olabi, A.G.; Abdelkareem, M.A.; Wilberforce, T.; Alkhalidi, A.; Salameh, T.; Abo-Khalil, A.G.; Hassan, M.M.; Sayed, E.T. Battery electric vehicles: Progress, power electronic converters, strength (S), weakness (W), opportunity (O), and threats (T). Int. J. Thermofluids 2022, 16, 100212. [Google Scholar] [CrossRef]
- Karthik, S.R. How Regenerative Braking Works in Electric Vehicles. Published on 25 July 2019. Circuitdigest. 2019. Available online: https://circuitdigest.com/article/how-regenerative-braking-works-in-electric-vehicles (accessed on 24 March 2020).
- Circuitglobe. Dynamic Braking or Rheostatic Braking of DC Motor. CircuitGlobe. 2020. Available online: https://circuitglobe.com/dynamic-braking-or-rheostatic-braking-of-dc-motor.html (accessed on 13 March 2020).
- ConnectUSFund. 6 Advantages and Disadvantages of Regenerative Braking System. ConnectUSFund. 2018. Available online: https://connectusfund.org/6-advantages-and-disadvantages-of-regenerative-braking-system (accessed on 27 February 2020).
- Woodford, C. How Regenerative Brakes Work. Published on 6th September, 2022. Explain That Stuff. 2022. Available online: https://www.explainthatstuff.com/how-regenerative-brakes-work.html (accessed on 4 April 2020).
- Buchmann, I. How Does a Supercapacitor Work? Battery University, Cadex Electronics Inc. 2019. Available online: https://batteryuniversity.com/learn/article/whats_the_role_of_the_supercapacitor (accessed on 7 March 2020).
- Hernandez-Ochoa, J.C.; Alejo-Reyes, A.; Rosas-Caro, J.C.; Valdez-Resendiz, J.E. Improved Operation of the Step-Up Converter with Large Voltage Gain and Low Voltage on Capacitors. Appl. Sci. 2023, 13, 2854. [Google Scholar] [CrossRef]
- Kapat, S.; Krein, P.T. Improved time optimal control of a buck converter based on capacitor current. IEEE Trans. Power Electron. 2011, 27, 1444–1454. [Google Scholar] [CrossRef]
- Zupan, T.; Stih, Z.; Trkulja, B. Fast and precise method for inductance calculation of coaxial circular coils with rectangular cross section using the one-dimensional integration of elementary functions applicable to superconducting magnets. IEEE Trans. Appl. Supercond. 2014, 24, 81–89. [Google Scholar] [CrossRef]
- Vasiljević, S.; Aleksandrović, B.; Glišović, J.; Maslać, M. Regenerative braking on electric vehicles: Working principles and benefits of application. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2022; Volume 1271, p. 012025. [Google Scholar] [CrossRef]
- Michaluk, N. One-Pedal Driving Rapid Feature Development with Simulink. In Proceedings of Mathworks’ 2017 Automotive Conference. 2017. Available online: https://www.mathworks.com/content/dam/mathworks/mathworks-dot-com/solutions/automotive/files/mac2017/one-pedal-driving-rapid-feature-development-with-simulink.pdf (accessed on 15 July 2024).
- Amaechi, C.V.; Reda, A.; Kgosiemang, I.M.; Ja’e, I.A.; Oyetunji, A.K.; Olukolajo, M.A.; Igwe, I.B. Guidelines on Asset Management of Offshore Facilities for Monitoring, Sustainable Maintenance, and Safety Practices. Sensors 2022, 22, 7270. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Reda, A.; Ja’e, I.A.; Wang, C.; An, C. Guidelines on Composite Flexible Risers: Monitoring Techniques and Design Approaches. Energies 2022, 15, 4982. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Hosie, G.; Reda, A. Review on Subsea Pipeline Integrity Management: An Operator’s Perspective. Energies 2023, 16, 98. [Google Scholar] [CrossRef]
- Jamadar, N.M.; Jadhav, H.T. Effectiveness of supercapacitor during braking operation of electric vehicle. Mater. Today Proc. 2022, 56, 314–319. [Google Scholar] [CrossRef]
- Kabasawa, K.; Kimura, K.; Taguchi, T.; Anekawa, A. Development of a New Powertrain for Subcompact Electric Vehicles; SAE Technical Paper 2013-01-1478; SAE: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Eichhorn, B.; König, S.; Ullrich, T. Electronic brake control for greater active safety. ATZ Worldw. 2014, 116, 50–53. [Google Scholar] [CrossRef]
- Schick, B.; Büttner, R.; Baltruschat, K.; Meier, G.; Jakob, H. Evaluation methods for the function and quality of driver assistance systems with active brake control. ATZ Worldw. 2007, 109, 14–18. [Google Scholar] [CrossRef]
- Xiao, B.; Lu, H.; Wang, H.; Ruan, J.; Zhang, N. Enhanced regenerative braking strategies for electric vehicles: Dynamic performance and potential analysis. Energies 2017, 10, 1875. [Google Scholar] [CrossRef]
- Tran, D.; Sheng, W.; Liu, L.; Liu, M. A Hidden Markov Model based driver intention prediction system. In Proceedings of the 5th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE-CYBER, Shenyang, China, 8–12 June 2015; pp. 115–120. [Google Scholar] [CrossRef]
- Zhang, D.; Zong, C.; Wan, Y.; Zheng, H.; Zhao, W.-Q. Development and Research on Control Strategy of Advanced Electronic Braking Systems for Commercial Vehicle; SAE Technical Paper 2014-01-2285; SAE: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Pan, H.; Guo, X.; Pei, X.; Pan, J.; Zhang, J. Research on Regenerative Braking Control Strategy of Distributed EV Based on Braking Intention; SAE Technical Paper 2018-01-1342; SAE: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Choi, J.; Jeong, J.; Park, Y.-I.; Cha, S.W. Evaluation of regenerative braking effect for E-REV bus according to characteristic of driving cycle. Int. J. Precis. Eng. Manuf.—Green Technol. 2015, 2, 149–155. [Google Scholar] [CrossRef]
- Heine, J.; Sylla, M.; Langer, I.; Schramm, T.; Abendroth, B.; Bruder, R. Algorithm for driver intention detection with fuzzy logic and edit distance. In Proceedings of the 18th IEEE International Conference on Intelligent Transportation Systems, ITSC 2015, Las Palmas de Gran Canaria, Spain, 15–18 September 2015; pp. 1022–1027. [Google Scholar] [CrossRef]
- Geraee, S.; Mohammadbagherpoor, H.; Shafiei, M.; Valizadeh, M.; Montazeri, F.; Feyzi, M.R. Regenerative braking of electric vehicle using a modified direct torque control and adaptive control theory. Comput. Electr. Eng. 2018, 69, 85–97. [Google Scholar] [CrossRef]
- Cao, J.-B.; Cao, B.-G. Neural network sliding mode control based on on-line identification for electric vehicle with ultracapacitor-battery hybrid power. Int. J. Control. Autom. Syst. 2009, 7, 409–418. [Google Scholar] [CrossRef]
- Zhou, K.; Chen, L.; Pan, C.; Chen, L.; Wang, X. Electric vehicle regenerative braking system based on constant current control of composite power sources. J. Mech. Eng. 2013, 49, 78–83. [Google Scholar] [CrossRef]
- Miller, M.; Holmes, A.; Conlon, B.; Savagian, P. The GM ‘Voltec’ 4ET50 multi-mode electric transaxle. SAE Int. J. Engines 2011, 4, 1102–1114. [Google Scholar] [CrossRef]
- Peng, B.; Zhang, H.; Xuan, G.; Xiao, W. Torque distribution strategy of electric vehicle with in-wheel motors based on the identification of driving intention. Automot. Innov. 2018, 1, 140–146. [Google Scholar] [CrossRef]
- Fang, S.; Song, J.; Song, H.; Tai, Y.; Li, F.; Nguyen, T.S. Design and control of a novel two-speed uninterrupted mechanical transmission for electric vehicles. Mech. Syst. Signal Process. 2016, 75, 473–493. [Google Scholar] [CrossRef]
- Geraee, S.; Mohammadbagherpoor, H.; Shafiei, M.; Valizadehdeh, M.; Montazeri, F.; Feyzi, M.R. A Modified DTC with Capability of Regenerative Braking Energy in BLDC driven Electric Vehicles Using Adaptive Control Theory. arXiv 2017, arXiv:1710.01873. [Google Scholar] [CrossRef]
- Kanarachos, S.; Alirezaei, M.; Jansen, S.; Maurice, J.-P. Control allocation for regenerative braking of electric vehicles with an electric motor at the front axle using the state-dependent Riccati equation control technique. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 129–143. [Google Scholar] [CrossRef]
- Li, W.; Li, H.; Huang, Z.; Liu, J.; Dang, S.; Du, H. A new braking torque distribution strategy based on braking actuator characteristics and a command signal for a blended braking system. IET Intell. Transp. Syst. 2022, 16, 825–841. [Google Scholar] [CrossRef]
- Chuanwei, Z. Simulation Study of H8 Control for Regenerative Braking of Electric Vehicle. In Proceedings of the 2010 International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 5–6 June 2010; pp. 439–441. [Google Scholar] [CrossRef]
- Buchmann, I. Batteries in a Portable World: A Handbook on Rechargeable Batteries for Non-Engineers, 4th ed.; Battery University: Canada, 2017; ISBN 978-0968211847. [Google Scholar]
- Zhao, Y.; Deng, W.; Wu, J.; He, R. Torque control allocation based on constrained optimization with regenerative braking for electric vehicles. Int. J. Automot. Technol. 2017, 18, 685–698. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, S.; Ma, J.; Yu, Q.; Gao, Q.; Yu, M. Identification of driver’s braking intention based on a hybrid model of GHMM and GGAPRBFNN. Neural Comput. Appl. 2018, 31, 161–174. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teasdale, A.; Ishaku, L.; Amaechi, C.V.; Adelusi, I.; Abdelazim, A. A Study on an Energy-Regenerative Braking Model Using Supercapacitors and DC Motors. World Electr. Veh. J. 2024, 15, 326. https://doi.org/10.3390/wevj15070326
Teasdale A, Ishaku L, Amaechi CV, Adelusi I, Abdelazim A. A Study on an Energy-Regenerative Braking Model Using Supercapacitors and DC Motors. World Electric Vehicle Journal. 2024; 15(7):326. https://doi.org/10.3390/wevj15070326
Chicago/Turabian StyleTeasdale, Alistair, Lucky Ishaku, Chiemela Victor Amaechi, Ibitoye Adelusi, and Abdelrahman Abdelazim. 2024. "A Study on an Energy-Regenerative Braking Model Using Supercapacitors and DC Motors" World Electric Vehicle Journal 15, no. 7: 326. https://doi.org/10.3390/wevj15070326