
A Bi-Objective Optimal Scheduling Method for the Charging and Discharging of EVs Considering the Uncertainty of Wind and Photovoltaic Output in the Context of Time-of-Use Electricity Price


Abstract
1. Introduction
1.1. Literature Review
1.2. Motivation and Contributions
2. Problem Description
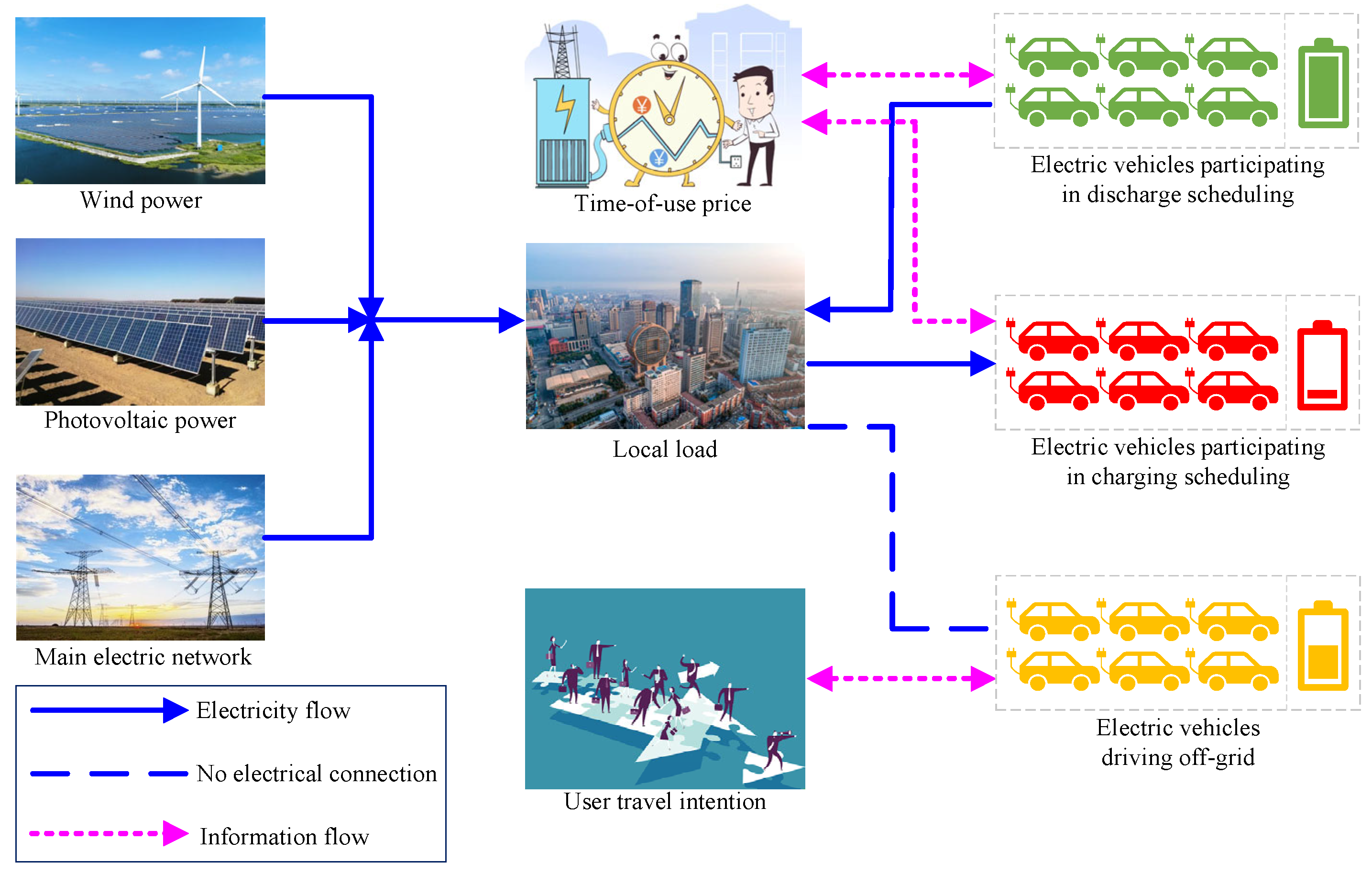
2.1. System Structure
2.2. Mathematical Model
3. Algorithm Design of Bi-Objective Optimal Scheduling
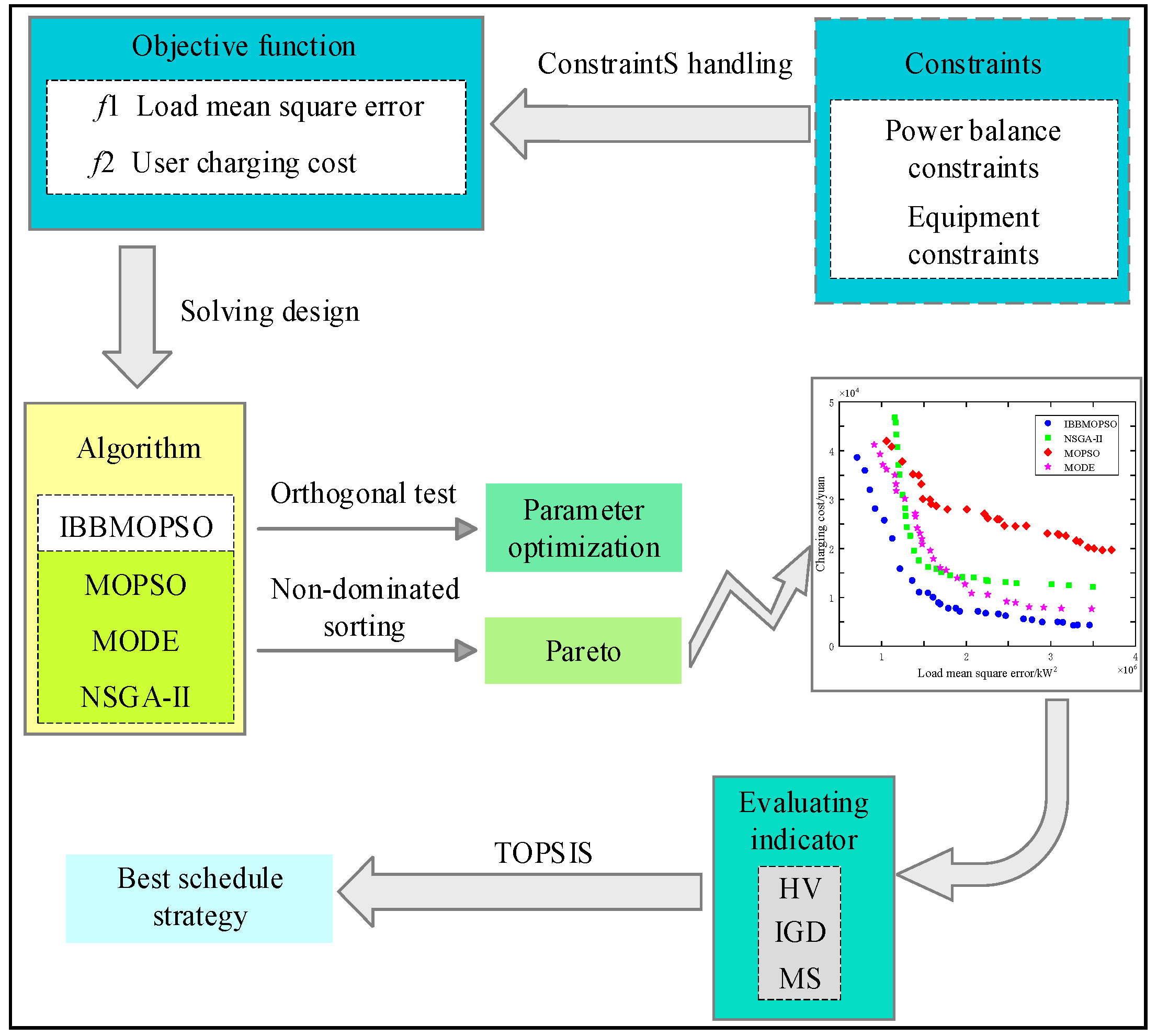
3.1. Structure of the Optimization Strategy
3.2. Algorithm Design
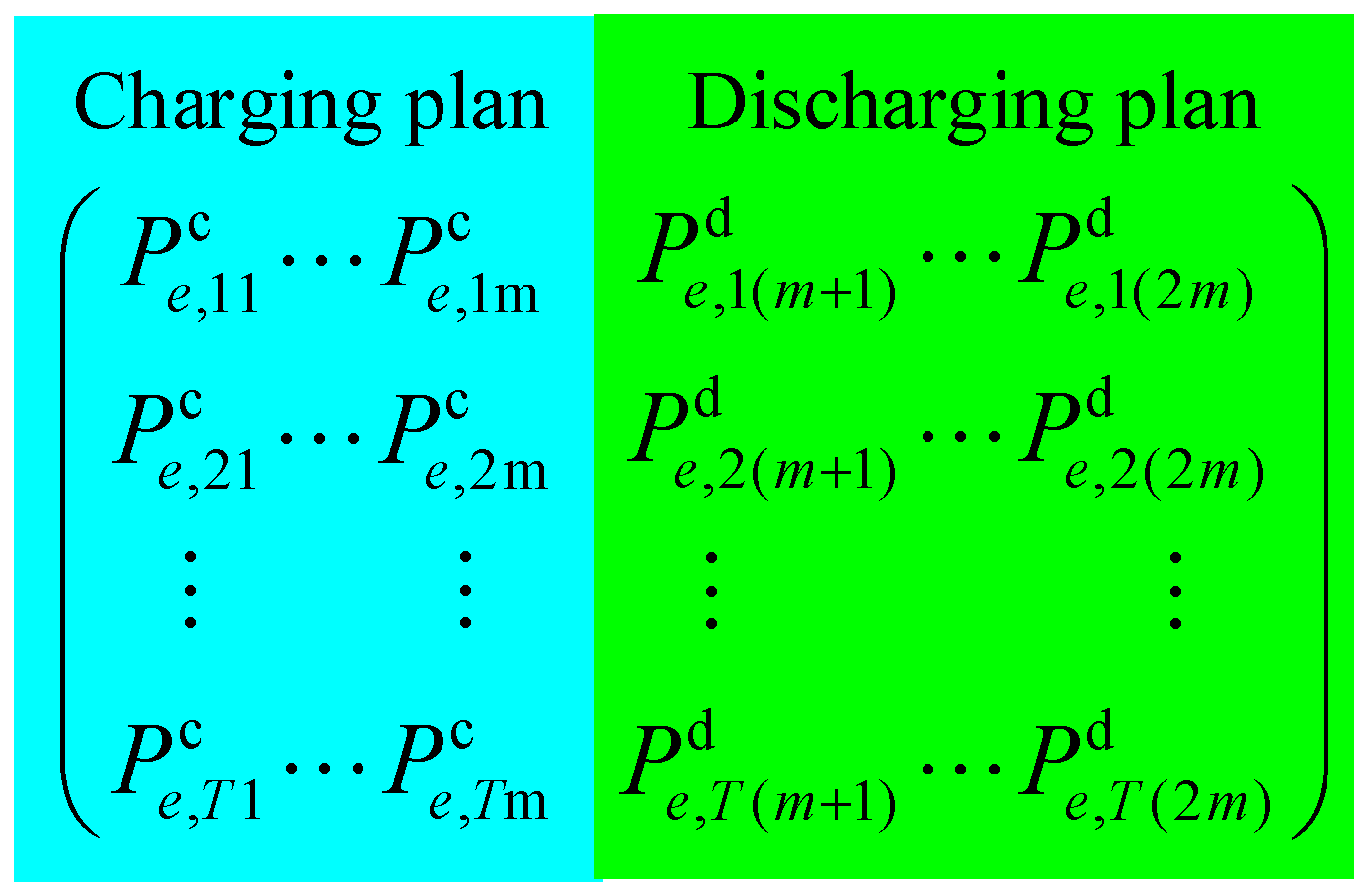
3.2.1. Particle Coding
3.2.2. Optimize the Particle Position Update Equation
3.2.3. Pseudo-Code of IBBMOPSO
| Algorithm 1 IBBMOPSO |
 |
3.3. Comprehensive Decision-Making
4. EV Travel Simulation
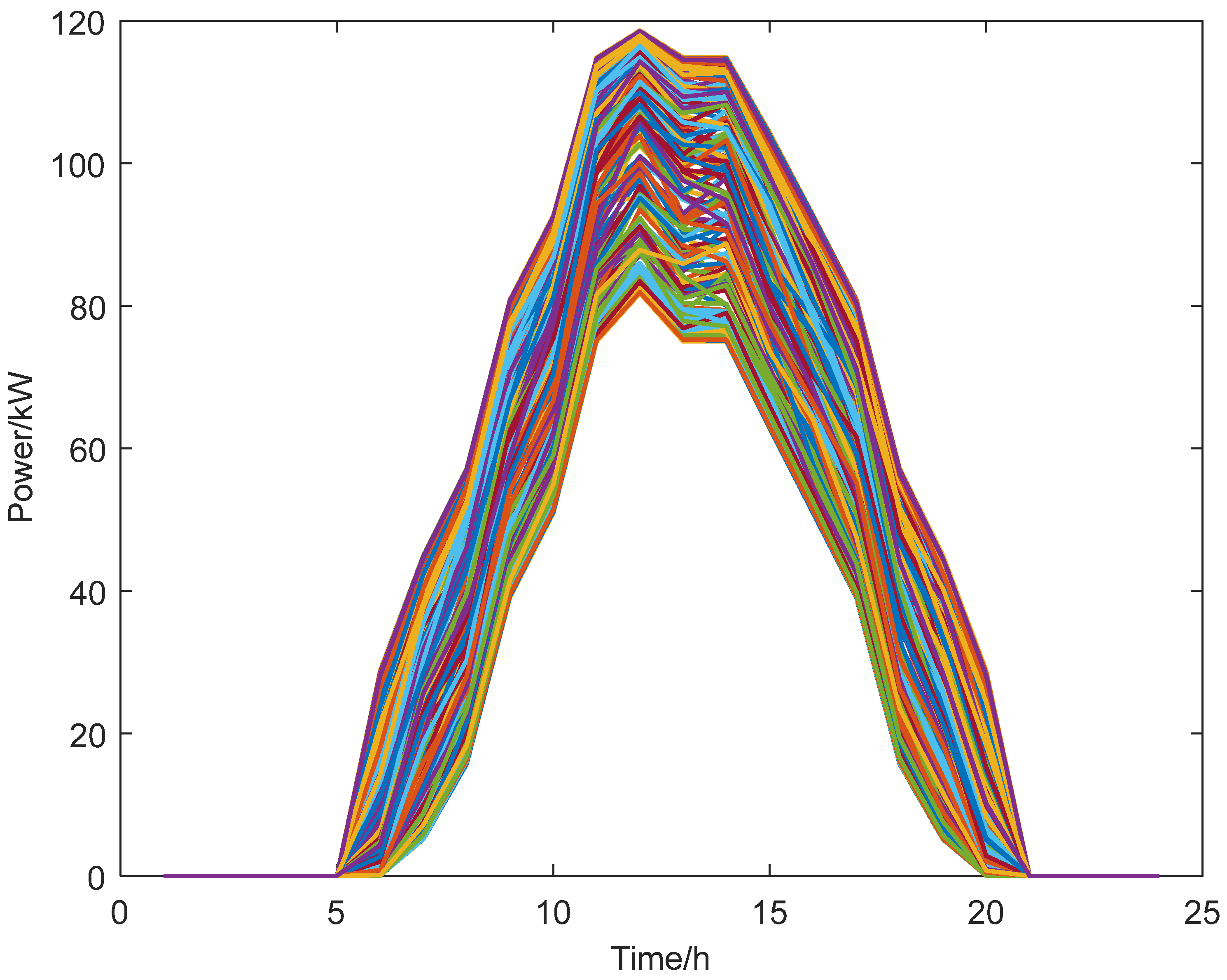
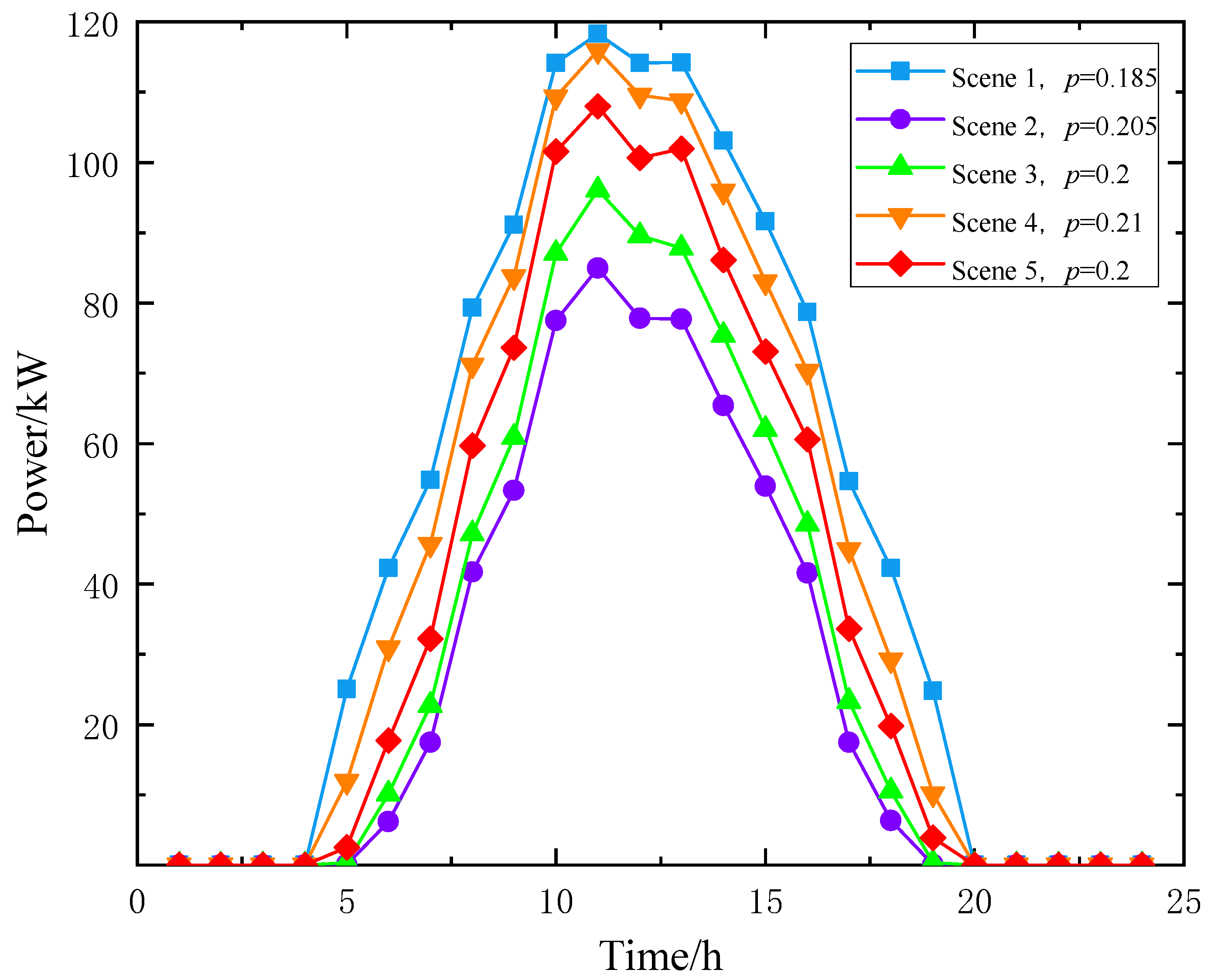
5. Wind Power Scenario and Photovoltaic Scenario Generation and Reduction
6. Simulation Analysis
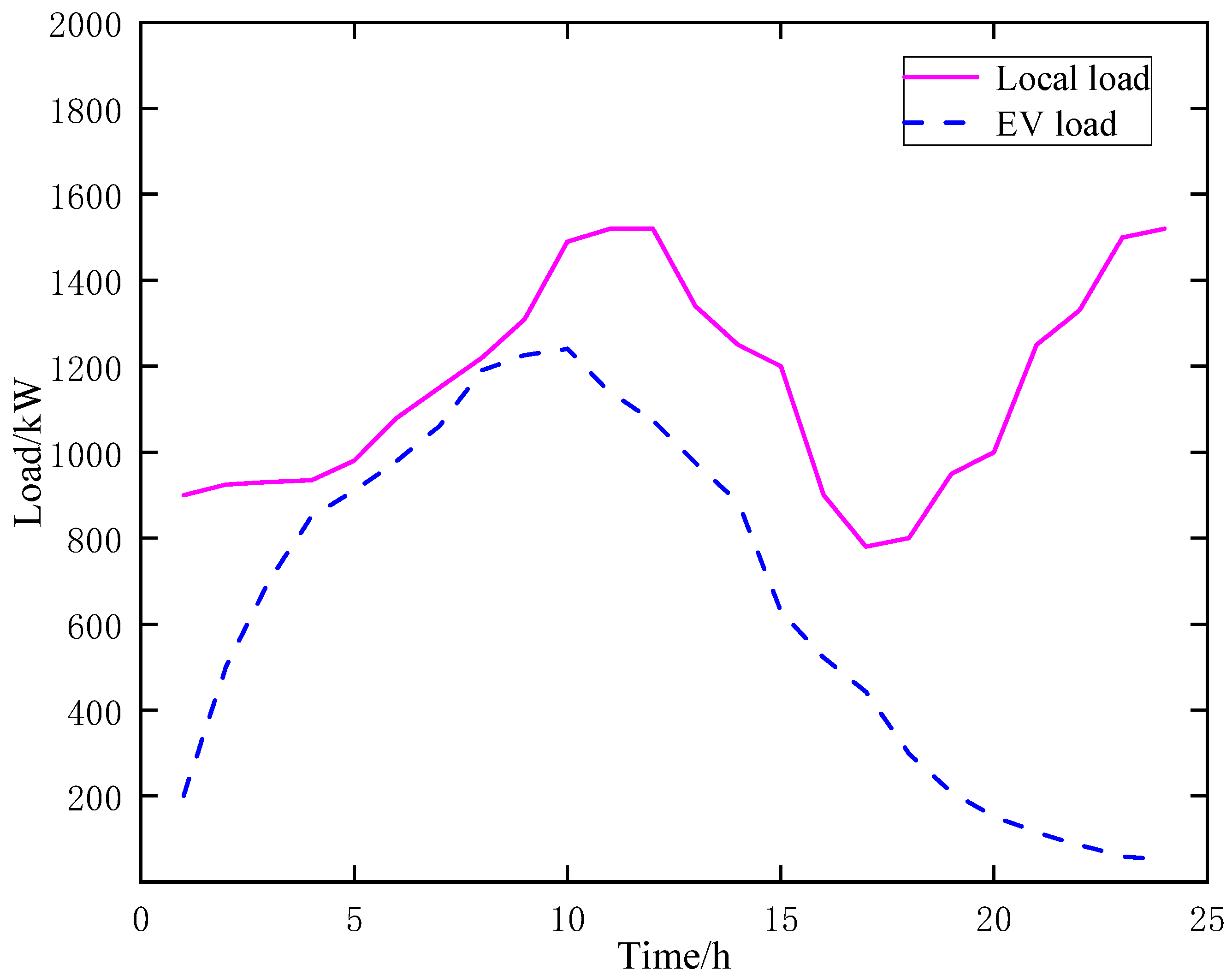
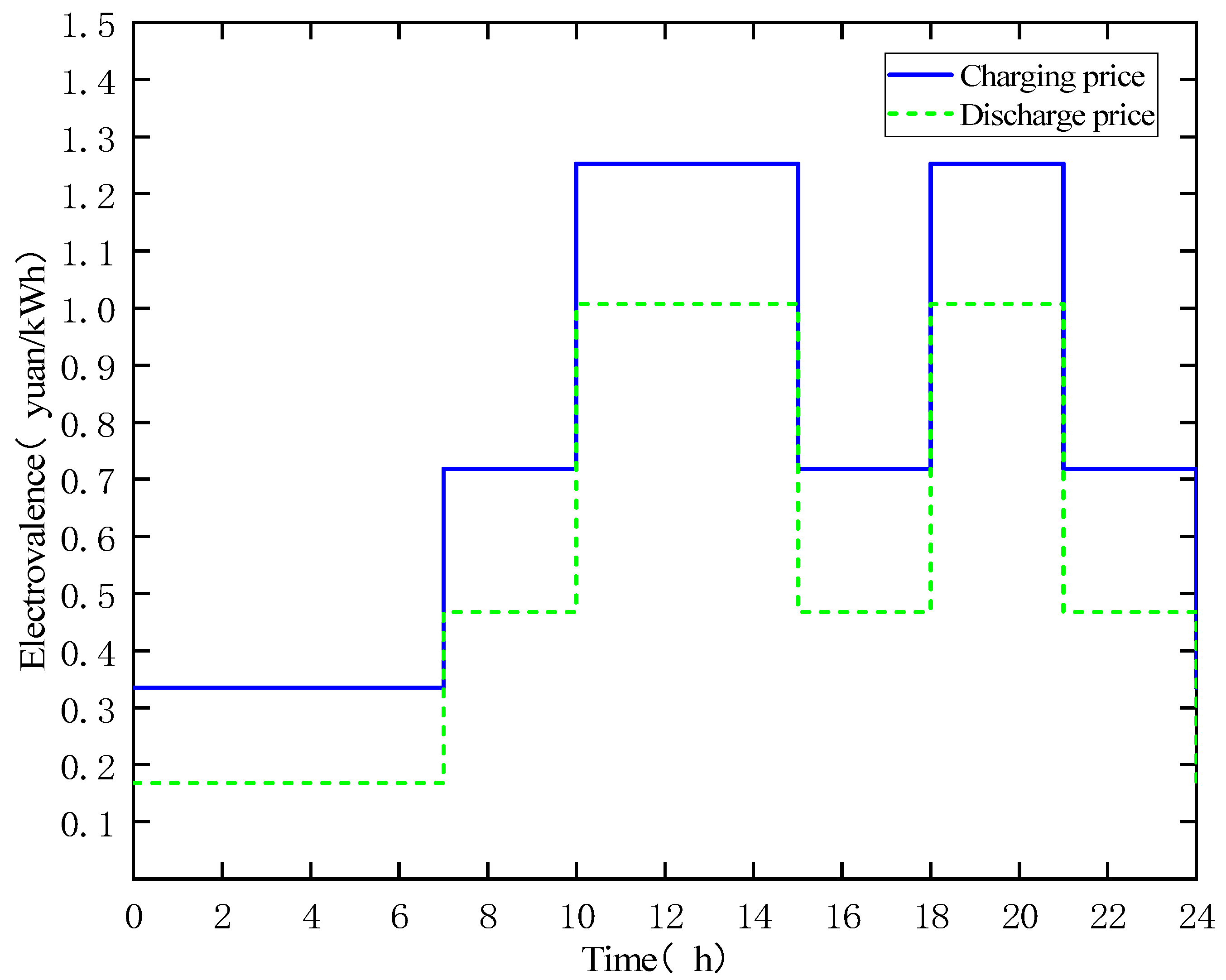
6.1. System Initial Data
6.2. Simulation Environment
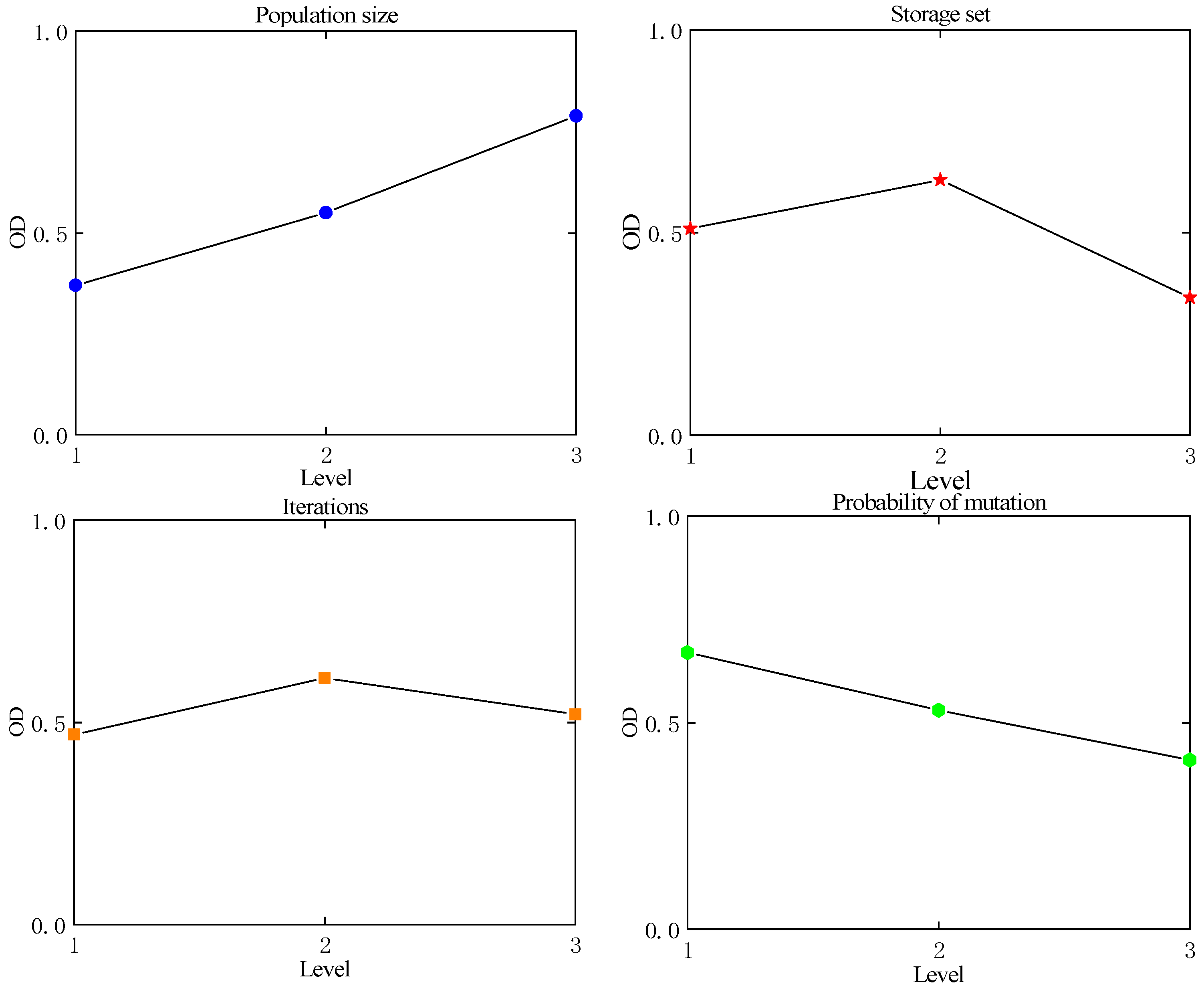
6.3. Algorithm Parameters Setting and Optimization
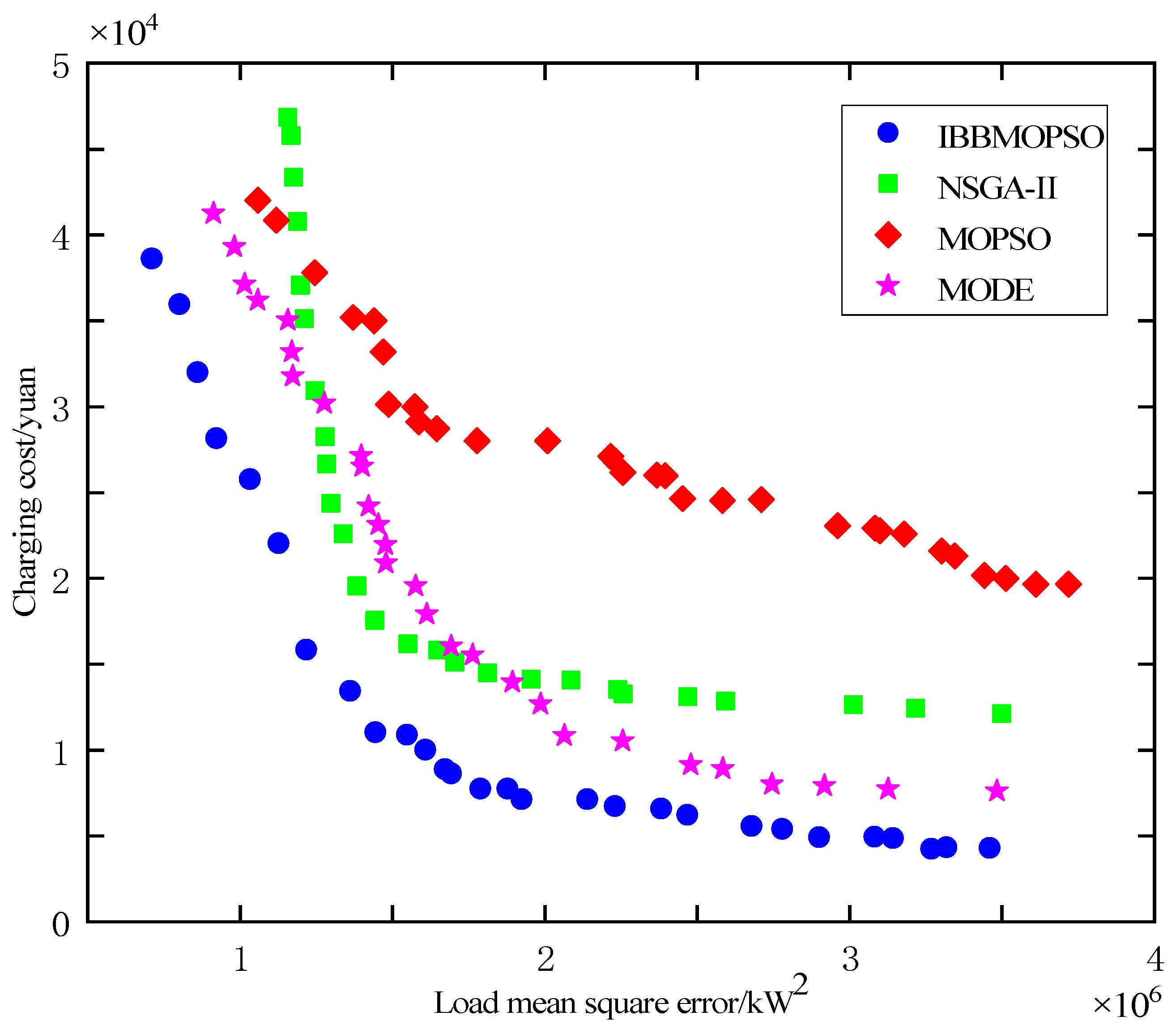
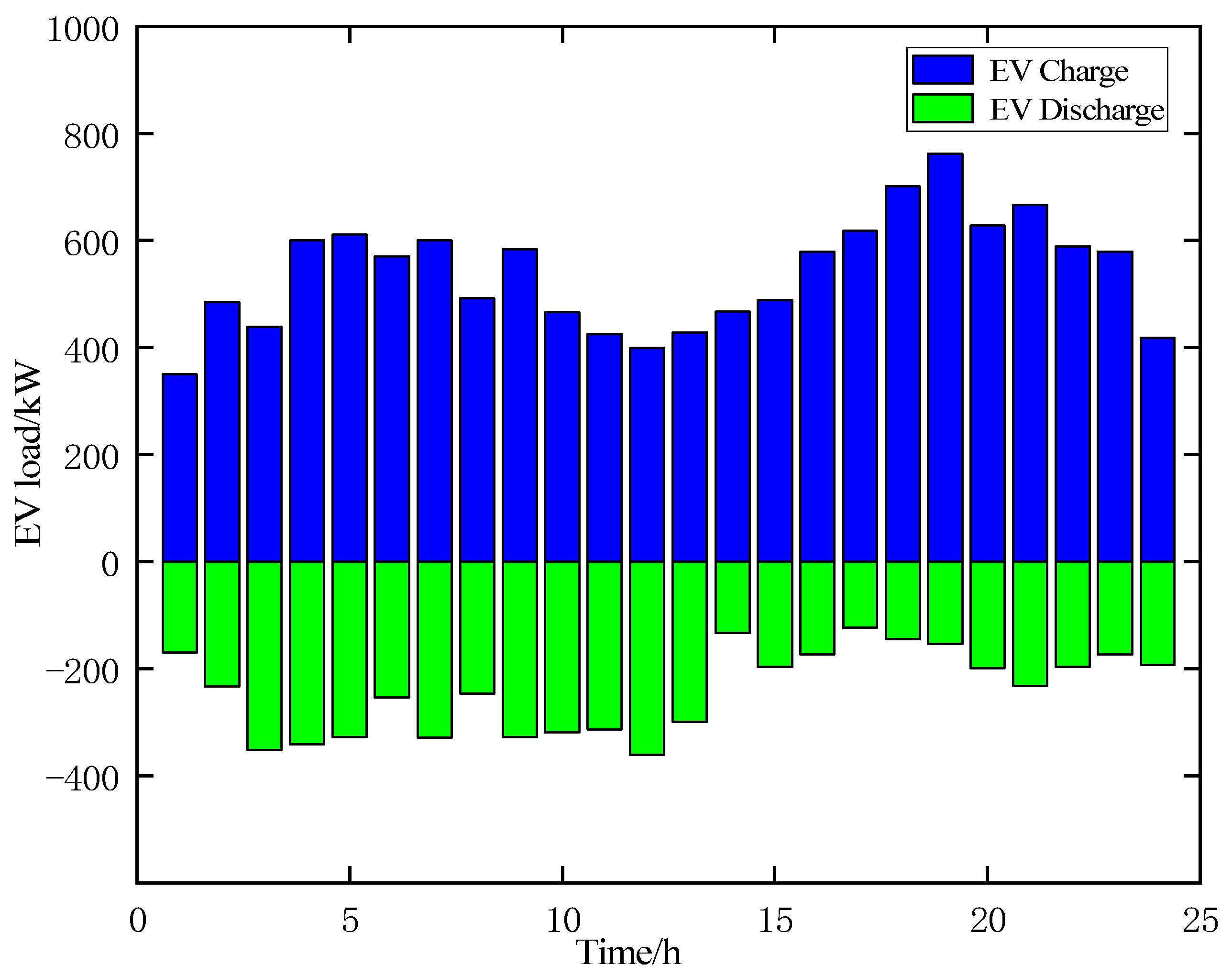
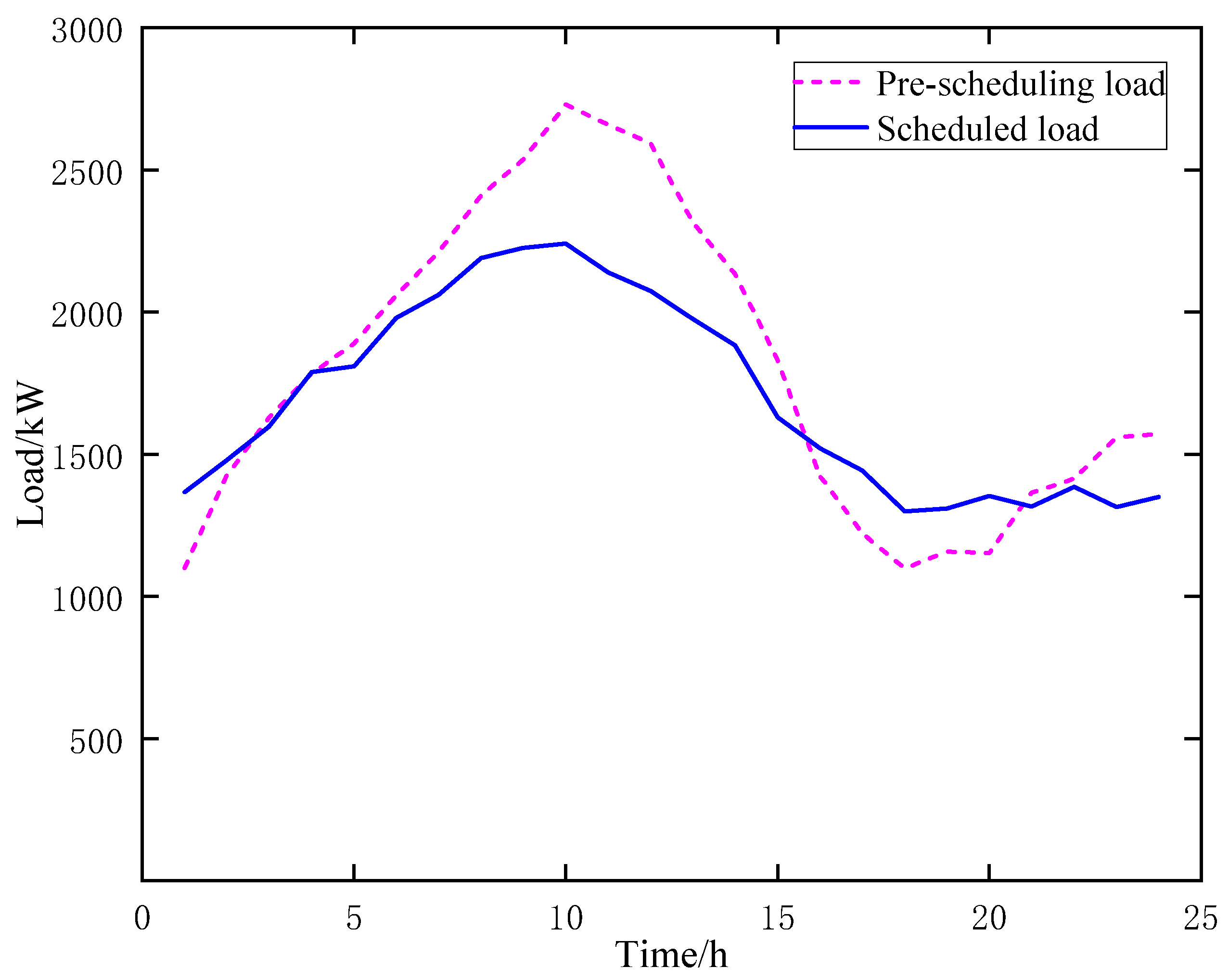
6.4. Simulation Results Analysis
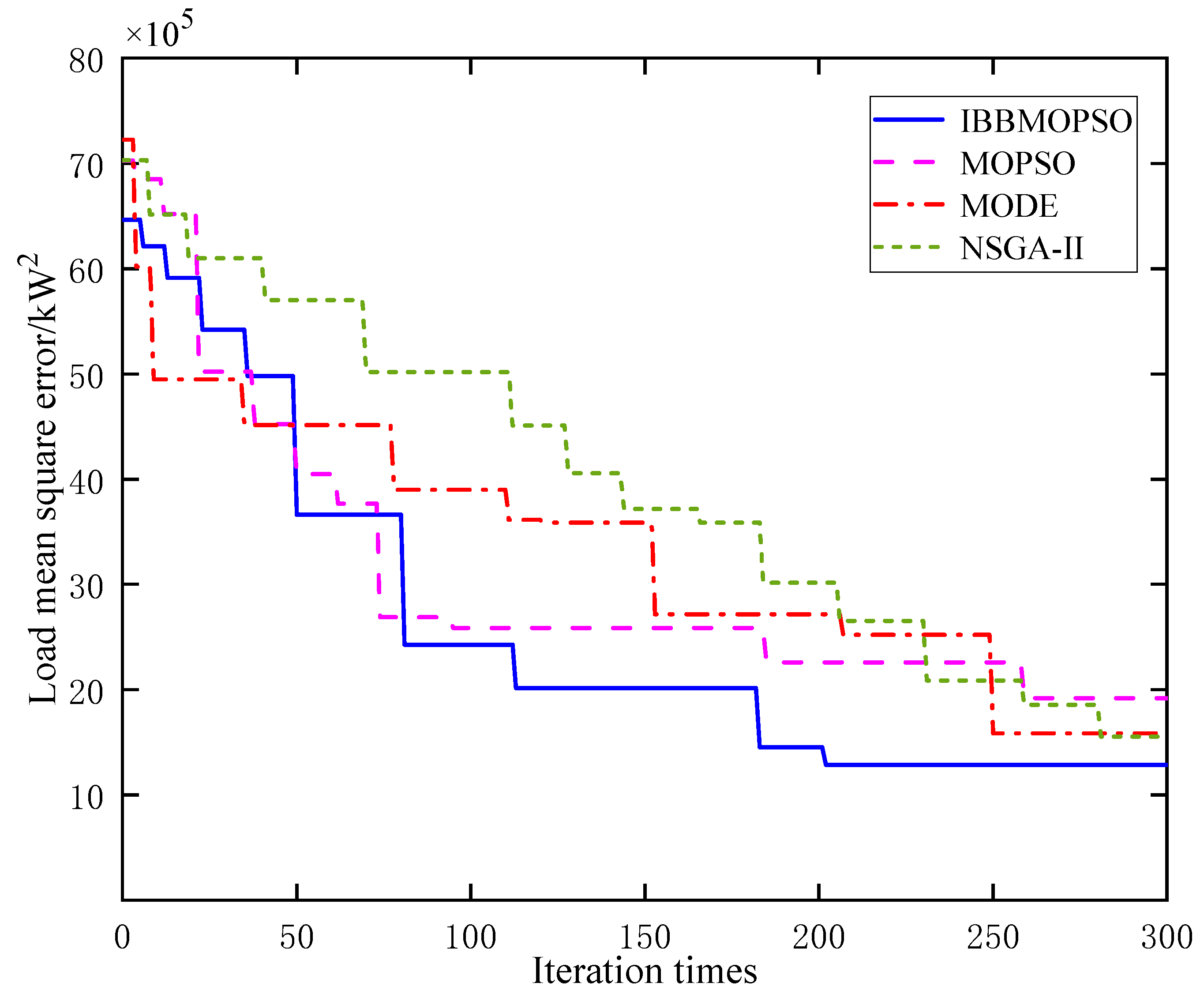
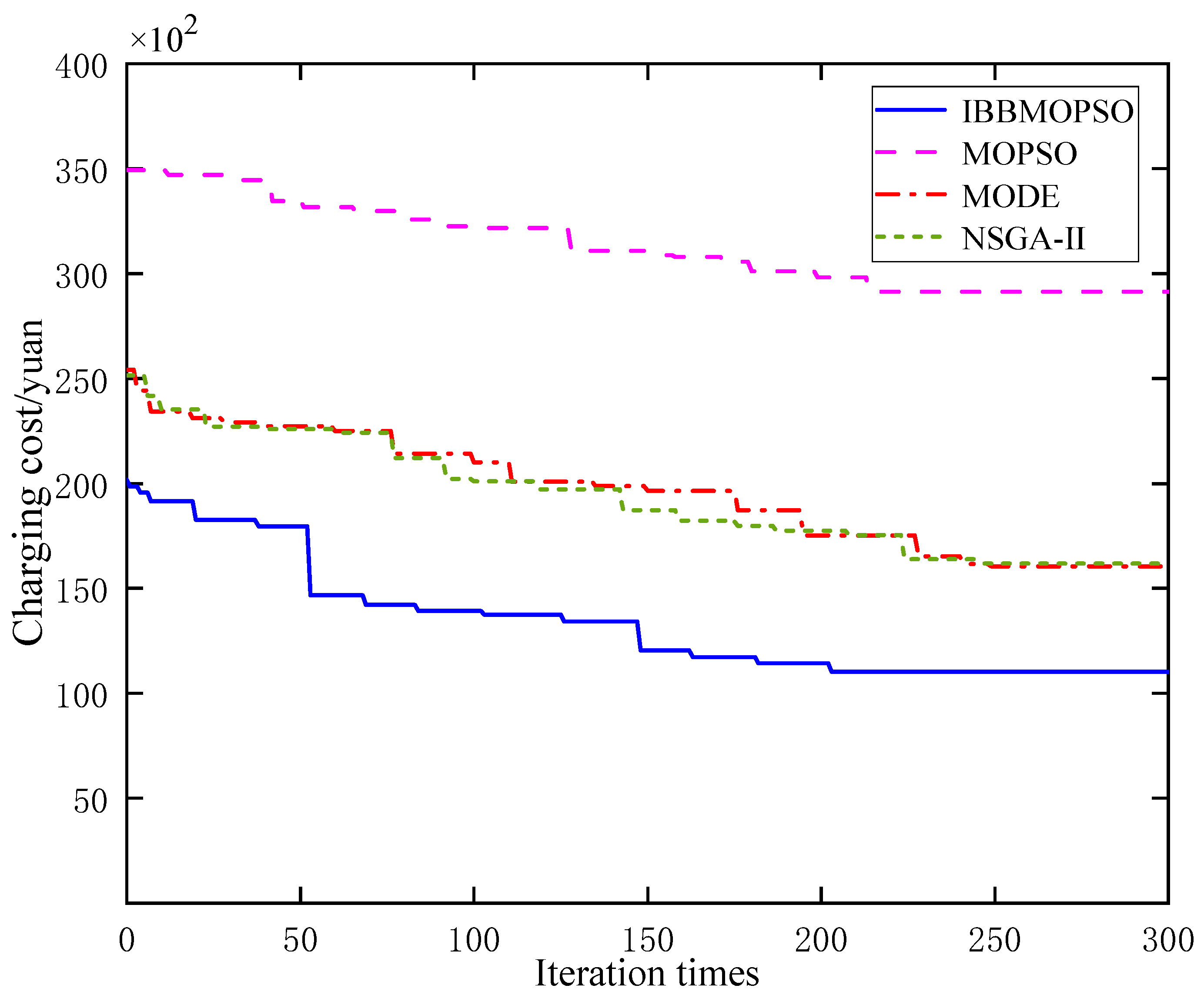
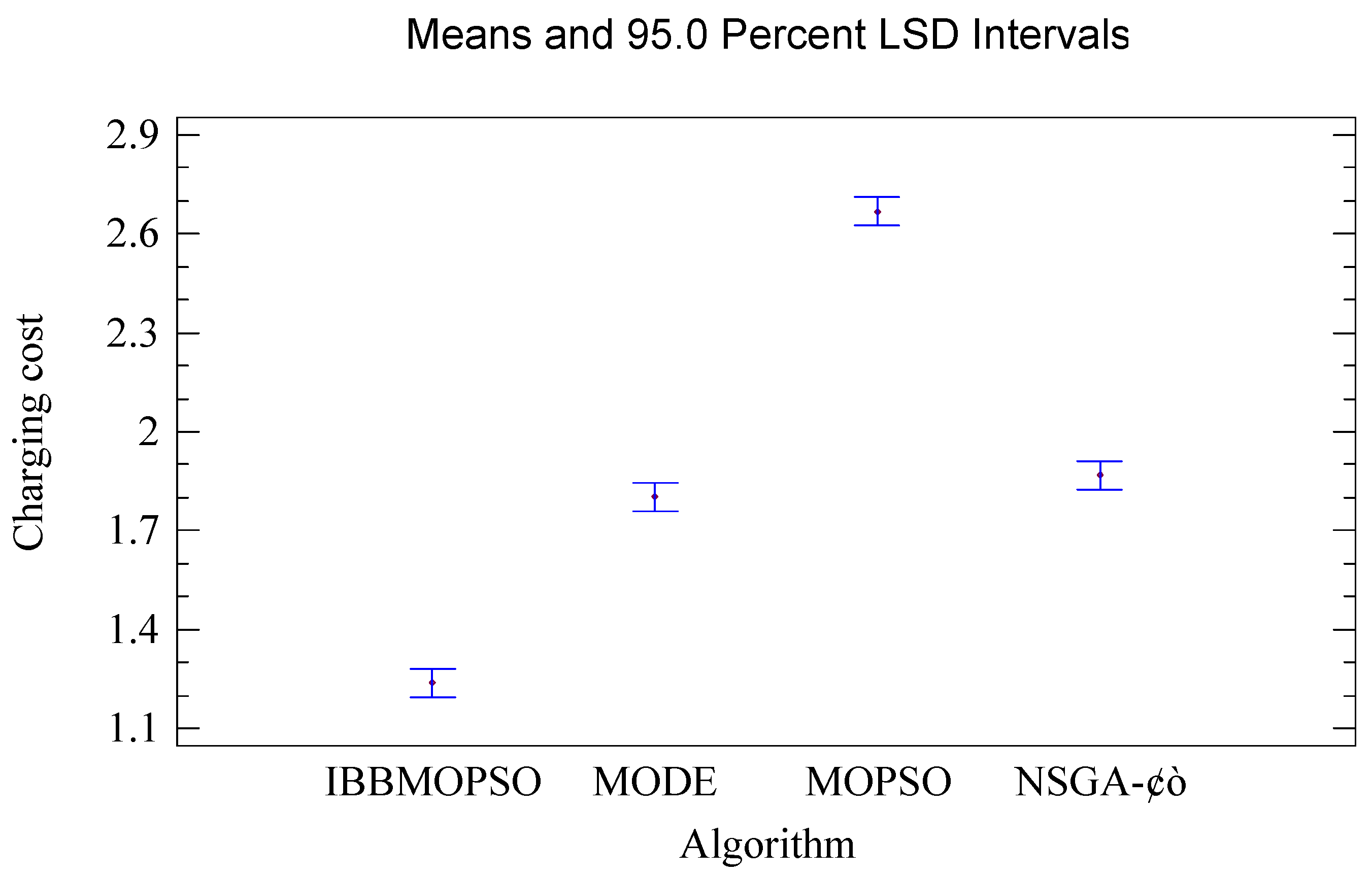
6.5. Algorithm Analysis
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| V2G | Vehicle-to-Grid; |
| IBBMOPSO | Improved bare-bones multi-objective particle swarm optimization; |
| LSTM | Long Short-Term Memory; |
| LP | Linear Programming; |
| IGD | Inverted Generational Distance; |
| HV | Hypervolume; |
| MS | Maximum spread; |
| TOPSIS | Technique for order preference by similarity to an ideal solution; |
| MOPSO | Multi-objective particle swarm optimization; |
| MODE | Multi-Objective Differential Evolution; |
| NSGA-II | Non-dominated Sorting Genetic Algorithm II; |
| IGWA | Improved grey wolf algorithm; |
| ICSA | Improved cuckoo search algorithm; |
| SOC | State of capacity; |
| RV | Response variables; |
| RPI | Relative percentage increase. |
References
- Bhaskar, C.; Jain, S.K. Scheduling of electric vehicle’s power in V2G and G2V modes using an improved charge–discharge opportunity-based approach. IEEE Trans. Transp. Electrif. 2023, 10, 811–822. [Google Scholar]
- Khabbouchi, I.; Said, D.; Oukaira, A.; Mellal, I.; Khoukhi, L. Machine learning and game-theoretic model for advanced wind energy management protocol (AWEMP). Energies 2023, 16, 2179. [Google Scholar] [CrossRef]
- Shaheen, H.I.; Rashed, G.I.; Yang, B.; Yang, J.; Shaheen, H.I.; Rashed, G.I.; Yang, B.; Yang, J. Optimal electric vehicle charging and discharging scheduling using metaheuristic algorithms: V2G approach for cost reduction and grid support. J. Energy Storage 2024, 90, 111816. [Google Scholar] [CrossRef]
- Yin, W.; Xuan, Q. Cooperative optimization strategy for large-scale electric vehicle charging and discharging. Energy 2022, 258, 124969. [Google Scholar] [CrossRef]
- Khalid, H.M.; Peng, J.C.H. Bidirectional charging in V2G systems: An in-cell variation analysis of vehicle batteries. IEEE Syst. J. 2020, 14, 3665–3675. [Google Scholar] [CrossRef]
- Tookanlou, M.B.; Kani, S.A.P.; Marzband, M. A comprehensive day-ahead scheduling strategy for electric vehicles operation. Int. J. Electr. Power Energy Syst. 2021, 131, 106912. [Google Scholar] [CrossRef]
- Chai, Y.T.; Che, H.S.; Tan, C.; Tan, W.-N.; Yip, S.-C.; Gan, M.-T. A two-stage optimization method for vehicle to grid coordination considering building and electric vehicle user expectations. Int. J. Electr. Power Energy Syst. 2023, 148, 108984. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Hao, L.; Zheng, X.; Liu, X.; Li, J. Multi-objective optimal scheduling strategy of microgrid based on V2G technology. In Proceedings of the 2022 12th International Conference on Power and Energy Systems (ICPES), Guangzhou, China, 23 December 2022. [Google Scholar]
- Paraskevas, A.; Aletras, D.; Chrysopoulos, A.; Marinopoulos, A.; Doukas, D.I. Optimal management for EV charging stations: A win–win strategy for different stakeholders using constrained deep Q-learning. Energies 2022, 15, 2323. [Google Scholar] [CrossRef]
- Zhang, C.; Yin, W.; Wen, T. An advanced multi-objective collaborative scheduling strategy for large scale EV charging and discharging connected to the predictable wind power grid. Energy 2024, 287, 129495. [Google Scholar] [CrossRef]
- Ren, L.; Yuan, M.; Jiao, X. Electric vehicle charging and discharging scheduling strategy based on dynamic electricity price. Eng. Appl. Artif. Intell. 2023, 123, 106320. [Google Scholar] [CrossRef]
- Shuai-Shuai, L.V.; Hui, W.; Ming-Yue, W.; Zi-Jie, L.; Di, W. Multi-objective day-ahead optimal scheduling of wind-solar microgrid considering V2G technology. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 21 May 2022. [Google Scholar]
- Saner, C.B.; Trivedi, A.; Srinivasan, D. A cooperative hierarchical multi-agent system for EV charging scheduling in presence of multiple charging stations. IEEE Trans. Smart Grid 2022, 13, 2218–2233. [Google Scholar] [CrossRef]
- Yu, H.; Tu, J.; Lei, X.; Shao, Z.; Jian, L. A cost-effective and high-efficient EV shared fast charging scheme with hierarchical coordinated operation strategy for addressing difficult-to-charge issue in old residential communities. Sustain. Cities Soc. 2024, 101, 105090. [Google Scholar] [CrossRef]
- Kandpal, B.; Pareek, P.; Verma, A. A robust day-ahead scheduling strategy for EV charging stations in unbalanced distribution grid. Energy 2022, 249, 123737. [Google Scholar] [CrossRef]
- Yin, W.; Wen, T.; Zhang, C. Cooperative optimal scheduling strategy of electric vehicles based on dynamic electricity price mechanism. Energy 2023, 263, 125627. [Google Scholar] [CrossRef]
- Triviño-Cabrera, A.; Aguado, J.A.; de la Torre, S. Joint routing and scheduling for electric vehicles in smart grids with V2G. Energy 2019, 175, 113–122. [Google Scholar] [CrossRef]
- Huang, Z.; Guo, Z.; Ma, P.; Wang, M.; Long, Y.; Zhang, M. Economic-environmental scheduling of microgrid considering V2G-enabled electric vehicles integration. Sustain. Energy Grids Netw. 2022, 32, 100872. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, L.; Tang, W.; Ma, Z.; Huang, J. Equilibrium configuration strategy of vehicle-to-grid-based electric vehicle charging stations in low-carbon resilient distribution networks. Appl. Energy 2024, 361, 122931. [Google Scholar] [CrossRef]
- Hou, H.; Wang, Y.; Chen, Y.; Zhao, B.; Zhang, L.; Xie, C. Long-time scale vehicle-to-grid scheduling strategy considering psychological effect based on weber-fechner law. Int. J. Electr. Power Energy Syst. 2022, 136, 107709. [Google Scholar] [CrossRef]
- Jie, X.; Huang, Y. The short-term optimal resource allocation approach for electric vehicles and V2G service stations. Appl. Energy 2022, 319, 119200. [Google Scholar]
- Zaneti, L.A.; Arias, N.B.; de Almeida, M.C.; Rider, M.J. Sustainable charging schedule of electric buses in a university campus: A rolling horizon approach. Renew. Sustain. Energy Rev. 2022, 161, 112276. [Google Scholar] [CrossRef]
- Pan, K.; Liang, C.-D.; Lu, M. Optimal scheduling of electric vehicle ordered charging and discharging based on improved gravitational search and particle swarm optimization algorithm. Int. J. Electr. Power Energy Syst. 2024, 157, 109766. [Google Scholar] [CrossRef]
- Yue, H.; Zhang, Q.; Zeng, X.; Huang, W.; Zhang, L.; Wang, J. Optimal scheduling strategy of electric vehicle cluster based on index evaluation system. IEEE Trans. Ind. Appl. 2022, 59, 1212–1221. [Google Scholar] [CrossRef]
- Sowmya, R.; Sankaranarayanan, V. Optimal vehicle-to-grid and grid-to-vehicle scheduling strategy with uncertainty management using improved marine predator algorithm. Comput. Electr. Eng. 2022, 100, 107949. [Google Scholar]
- Choudhary, D.; Mahanty, R.N.; Kumar, N. Plug-in electric vehicle dynamic pricing strategies for bidirectional power flow in decentralized and centralized environment. Sustain. Energy Grids Netw. 2024, 38, 101317. [Google Scholar] [CrossRef]
- Er, G.; Soykan, G.; Canakoglu, E. Stochastic optimal design of a rural microgrid with hybrid storage system including hydrogen and electric cars using vehicle-to-grid technology. J. Energy Storage 2024, 75, 109747. [Google Scholar] [CrossRef]
- Jin, Y.; Acquah, M.A.; Seo, M.; Ghorbanpour, S.; Han, S.; Jyung, T. Optimal EV scheduling and voltage security via an online bi-layer steady-state assessment method considering uncertainties. Appl. Energy 2023, 347, 121356. [Google Scholar] [CrossRef]
- Pang, X.; Wang, Y.; Yang, S.; Liu, W.; Yu, Y. A bi-objective low-carbon economic scheduling method for cogeneration system considering carbon capture and demand response. Expert Syst. Appl. 2024, 243, 122875. [Google Scholar] [CrossRef]
- Coelloc, A.C.; Cortés, N.C. Solving multi-objective optimization problems using an artificial immune system. Genetic. Program. Evolvable Mach. 2005, 6, 163–190. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L. Multi-objective evolutionary algorithms: A comparative case study and the strength pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Luo, S.; Guo, X. Multi-objective optimization problem of the microgrid power dispatch using improved multi-objective evolutionary algorithm based on decomposition. J. Sys. Sci. Math. Sci. 2020, 40, 81–104. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Researchers | Direction of Power Flow | Objective Function | EVs Data Sources | Solution Method | Parameter Optimization | Pareto | Evaluating Indicator | Decision-Making Method | |||
|---|---|---|---|---|---|---|---|---|---|---|---|
| One-Way | Both-Way | Economic Goal | Load Goal | Others | |||||||
| Chai et al. [7] (2023) | √ | √ | Historical data | CPLEX | |||||||
| Ren et al. [11] (2023) | √ | √ | √ | Monte Carlo | Simplex algorithm | ||||||
| LV et al. [12] (2022) | √ | √ | √ | Monte Carlo | IGWA | ||||||
| Saner et al. [13] (2022) | √ | √ | √ | CPLEX | |||||||
| Zhang et al. [8] (2022) | √ | √ | √ | ICSA | |||||||
| Zhao et al. [18] (2022) | √ | √ | √ | Monte Carlo | GA | ||||||
| Xu et al. [21] (2022) | √ | √ | CPLEX | ||||||||
| Hou et al. [20] (2022) | √ | √ | √ | Monte Carlo | GA | ||||||
| Yin et al. [16] (2023) | √ | √ | Historical data | CPLEX | |||||||
| Zaneti et al. [22] (2022) | √ | √ | Historical data | CPLEX | |||||||
| This paper | √ | √ | √ | Monte Carlo | IBBMOPSO | Orthogonal test | √ | IGD, HV, MS | TOPSIS | ||
| Parameter | Numerical Value |
|---|---|
| Quantity of EV | 500 |
| Rated charging power | 12 kW |
| Rated discharge power | 12 kW |
| EV battery capacity | 60 kWh |
| Expected SOC of the user | 0.8 |
| Maximum discharge depth | 0.5 |
| Power consumption per kilometer | 0.15 |
| Battery charge efficiency | 90% |
| Battery discharge efficiency | 90% |
| Parameter | Level | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| N | 25 | 50 | 75 |
| P | 30 | 40 | 50 |
| T | 200 | 300 | 400 |
| K | 5 | 10 | 15 |
| Experiment Number | Factor | OD | |||
|---|---|---|---|---|---|
| N | P | T | K | ||
| 1 | 1 | 1 | 1 | 1 | 0.5371 |
| 2 | 1 | 2 | 2 | 2 | 0.6215 |
| 3 | 1 | 3 | 3 | 3 | 0.5231 |
| 4 | 2 | 1 | 2 | 3 | 0.6776 |
| 5 | 2 | 2 | 3 | 1 | 0.7316 |
| 6 | 2 | 3 | 1 | 2 | 0.6829 |
| 7 | 3 | 1 | 3 | 2 | 0.7917 |
| 8 | 3 | 2 | 1 | 3 | 0.5813 |
| 9 | 3 | 3 | 2 | 1 | 0.7218 |
| Algorithms | Charging Cost/CNY | Load Mean Square Error/kW2 | Simulation Time/s |
|---|---|---|---|
| IBBMOPSO | 11,032.4 | 12.84 × 105 | 19.71 |
| MOPSO | 29,125.5 | 19.18 × 105 | 28.68 |
| MODE | 16,053.0 | 15.86 × 105 | 33.49 |
| NSGA-Ⅱ | 16,183.3 | 15.51 × 105 | 27.93 |
| Scenario | Charging Cost/CNY | Load Mean Square Error/kW2 |
|---|---|---|
| 1 | 11,121.4 | 12.42 × 105 |
| 2 | 11,032.4 | 12.84 × 105 |
| 3 | 11,925.8 | 12.71 × 105 |
| 4 | 11,283.3 | 12.65 × 105 |
| 5 | 11,516.9 | 12.81 × 105 |
| Algorithm | IGD | HV | MS |
|---|---|---|---|
| IBBMOPSO | 2.871 × 10−3 | 0.417 × 10−2 | 0.9316 |
| NAGA-Ⅱ | 3.719 × 10−3 | 0.325 × 10−2 | 0.8962 |
| MOPSO | 3.921 × 10−3 | 0.359 × 10−2 | 0.8286 |
| MODE | 3.164 × 10−3 | 0.394 × 10−2 | 0.8767 |
| Number | Load Mean Square Error | Charging Cost | ||||||
|---|---|---|---|---|---|---|---|---|
| IBBMOPSO | MODE | MOPSO | NSGA-Ⅱ | IBBMOPSO | MODE | MOPSO | NSGA-Ⅱ | |
| 1 | 0.727 | 1.215 | 0.918 | 1.328 | 0.125 | 0.827 | 1.961 | 1.743 |
| 2 | 1.021 | 2.086 | 1.768 | 1.657 | 1.172 | 1.372 | 1.821 | 0.781 |
| 3 | 1.125 | 0.829 | 1.562 | 1.853 | 0.521 | 1.538 | 2.319 | 0.579 |
| 4 | 0.917 | 1.656 | 1.847 | 1.943 | 0.965 | 1.632 | 2.191 | 1.636 |
| 5 | 0.135 | 1.867 | 2.312 | 0.781 | 1.278 | 0.976 | 2.012 | 1.673 |
| 6 | 0.813 | 1.929 | 1.965 | 1.128 | 0.821 | 1.257 | 2.571 | 1.728 |
| 7 | 0.137 | 1.712 | 1.731 | 1.743 | 0.917 | 1.551 | 1.569 | 0.217 |
| 8 | 0.215 | 0.921 | 1.727 | 2.012 | 1.216 | 0.527 | 1.127 | 0.721 |
| 9 | 0.426 | 1.671 | 2.012 | 1.667 | 1.748 | 0.613 | 1.765 | 1.137 |
| 10 | 0.000 | 1.412 | 2.125 | 1.439 | 0.000 | 0.215 | 1.246 | 0.621 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, X.; Jia, W.; Li, H.; Gao, Q.; Liu, W. A Bi-Objective Optimal Scheduling Method for the Charging and Discharging of EVs Considering the Uncertainty of Wind and Photovoltaic Output in the Context of Time-of-Use Electricity Price. World Electr. Veh. J. 2024, 15, 398. https://doi.org/10.3390/wevj15090398
Pang X, Jia W, Li H, Gao Q, Liu W. A Bi-Objective Optimal Scheduling Method for the Charging and Discharging of EVs Considering the Uncertainty of Wind and Photovoltaic Output in the Context of Time-of-Use Electricity Price. World Electric Vehicle Journal. 2024; 15(9):398. https://doi.org/10.3390/wevj15090398
Chicago/Turabian StylePang, Xinfu, Wen Jia, Haibo Li, Qingzhong Gao, and Wei Liu. 2024. "A Bi-Objective Optimal Scheduling Method for the Charging and Discharging of EVs Considering the Uncertainty of Wind and Photovoltaic Output in the Context of Time-of-Use Electricity Price" World Electric Vehicle Journal 15, no. 9: 398. https://doi.org/10.3390/wevj15090398
APA StylePang, X., Jia, W., Li, H., Gao, Q., & Liu, W. (2024). A Bi-Objective Optimal Scheduling Method for the Charging and Discharging of EVs Considering the Uncertainty of Wind and Photovoltaic Output in the Context of Time-of-Use Electricity Price. World Electric Vehicle Journal, 15(9), 398. https://doi.org/10.3390/wevj15090398