
Impact Assessment of Integrating AVs in Optimizing Urban Traffic Operations for Sustainable Transportation Planning in Riyadh


Abstract
:1. Introduction
Accordingly, Several Objectives Have Been Identified to Be Achieved in This Research
- Assess and Measure the Optimization of Traffic Flow: To develop novel algorithms and strategies to maximize traffic flow in urban and regional areas by intelligently incorporating AVs;
- Assess and Measure the Mitigation of Urban Traffic Congestion: Investigate congestion mitigation techniques through the integration of AVs, aiming to reduce traffic bottlenecks and enhance overall transportation system efficiency;
- Assess and Measure the Enhancement of Urban Signalized Intersections and Traffic Signal Synchronization: To propose advanced traffic signal HCM Optimization methods to ensure efficient and coordinated movement of vehicles, particularly in mixed-traffic environments;
- Model AV Impact: To create comprehensive models to quantify the impact of AVs on traffic flow and congestion, considering factors such as adoption rates, technology advancements, and vehicle interactions;
- Develop Effective Policy and Planning Frameworks: To formulate innovative policies and planning frameworks that promote the seamless integration of AVs into urban and regional transportation systems, addressing legal, infrastructural, and societal considerations.
- Advanced Traffic Management: This research contributes novel approaches to traffic management by optimizing traffic flow and reducing congestion through autonomous vehicle integration, ultimately leading to more efficient transportation systems;
- Sustainable Urban Planning: This study proposes advanced traffic signal synchronization methods to enhance the sustainability of urban planning by minimizing travel times and decreasing environmental impacts;
- AV Impact Assessment: Assessing the impact provides a comprehensive understanding of how AVs impact traffic operations, contributing valuable insights for decision-makers, planners, and policymakers;
- Innovative Policy Frameworks: This research offers innovative policy and planning frameworks for integrating AVs into urban and regional transportation, addressing legal and infrastructural aspects and ensuring a smooth transition;
- Holistic Traffic Solutions: This paper offers a holistic approach to addressing the challenges and opportunities of AVs in traffic management, paving the way for more efficient and sustainable urban and regional transportation systems.
2. Review Literature
2.1. AV-Based Traffic Flow Optimization
2.2. Congestion Mitigation Strategies
2.3. Traffic Signal Synchronization in Mixed Environments
2.4. Policy and Infrastructure Readiness for AV Integration
2.5. Gaps in Current Research
3. Materials and Methods
3.1. Dataset Description
3.1.1. Traffic Operations Data
3.1.2. Autonomous Vehicle Interaction Data
3.1.3. Traffic Signal and Infrastructure Data
3.1.4. Policy and Planning Framework Data
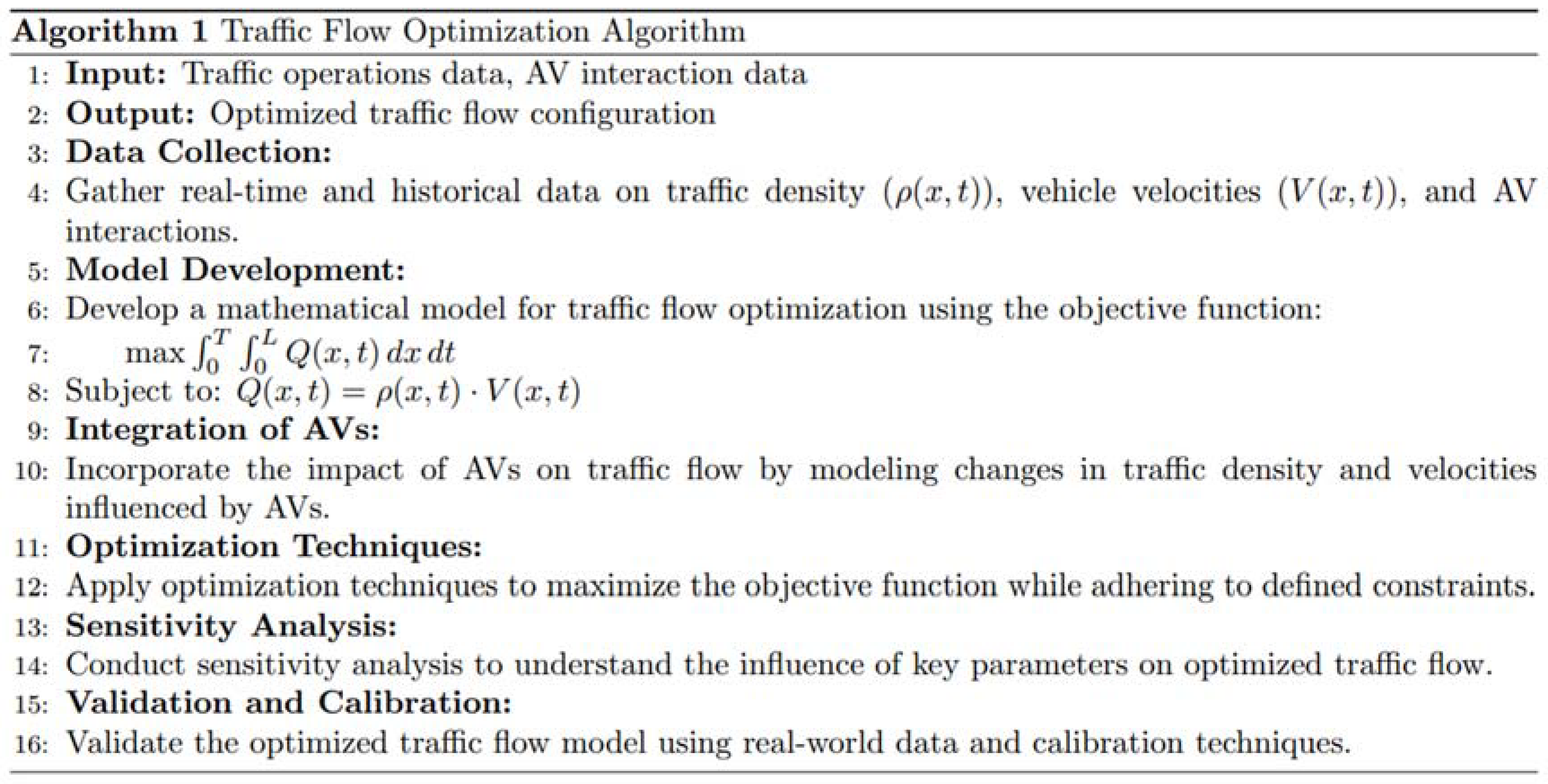
3.2. Traffic Flow HCM Optimization
- Data Collection: Gather real-time and historical data on traffic density (ρ(x,t)), vehicle velocities (V(x,t)), and other relevant parameters from urban areas. Additionally, collect data on AV interactions and their impact on traffic flow;
- Model Development: Develop a mathematical model for traffic flow HCM Optimization by formulating an objective function that maximizes vehicle throughput through road networks. Consider the relationships between traffic density, vehicle velocities, and the impact of AVs;
- Integration of AVs: Incorporate the impact of AVs on traffic flow by modeling the changes in traffic density and velocities influenced by their presence. Consider factors such as AV adoption rates, technology advancements, and their ability to adapt to traffic conditions;
- HCM Optimization Techniques: Apply HCM Optimization techniques, such as gradient descent or evolutionary algorithms, to maximize the objective function while adhering to the defined constraints. The process aims to find the optimal traffic flow configuration considering both traditional vehicles and AVs;
- Sensitivity Analysis: Perform sensitivity analysis to understand the influence of key parameters, such as AV adoption rates and traffic density, on the optimized traffic flow. This analysis aids in identifying critical factors for adequate traffic flow HCM Optimization;
- Validation and Calibration: Validate the optimized traffic flow model using real-world data and calibration techniques. Ensure the model accurately represents the observed traffic conditions and applies to diverse urban and regional settings.
3.3. Congestion Mitigation
- Data Collection: Gather real-time and historical data on traffic flow, congestion levels, and relevant parameters from urban areas. Additionally, collect data on AV interactions and their impact on congestion patterns;
- Model Development: Develop a mathematical model for congestion mitigation by formulating an objective function that minimizes congestion levels through effective traffic management. Consider the relationship between the maximum sustainable traffic flow (Qmax) and the actual traffic flow (Q(x,t)) at a given location and time;
- 3.
- Integration of AVs: Incorporate the impact of AVs on congestion levels by modeling changes in traffic flow and congestion patterns influenced by their presence. Consider factors such as AV adoption rates, technology advancements, and their ability to navigate traffic efficiently;
- 4.
- HCM Optimization Techniques: Apply HCM Optimization techniques to minimize the objective function, aiming to reduce congestion levels while adhering to the defined constraints. HCM Optimization algorithms, such as linear programming or metaheuristic methods, can be employed to find the optimal solution. The advanced HCM Optimization formulations have been used to optimize traffic flow, taking inspiration from established methodologies outlined in the HCM. The manual provides comprehensive insights into design-oriented evaluation methods, which have been used to formulate the study of HCM Optimization models.
- 5.
- Sensitivity Analysis: Conduct sensitivity analysis to assess the influence of key parameters, such as AV adoption rates and maximum sustainable traffic flow, on the effectiveness of congestion mitigation. This analysis helps identify critical factors for successful congestion reduction;
- 6.
- Validation and Calibration: Validate the congestion mitigation model using real-world data and calibration techniques. Ensure the model accurately represents observed congestion levels and applies to diverse urban and regional settings.
3.4. Traffic Signal HCM Optimization


3.5. AV Integration and Impact Modeling

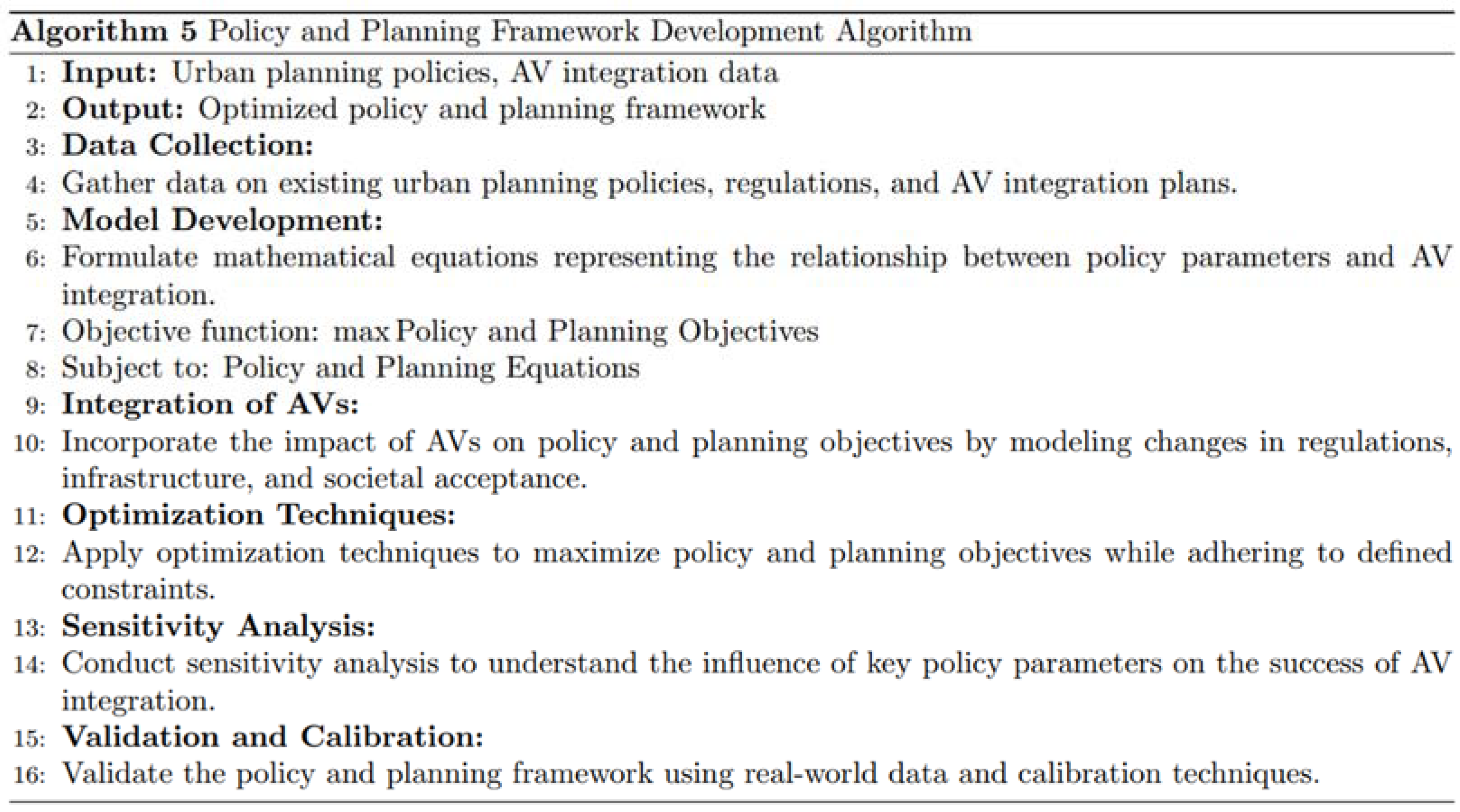
3.6. Policy and Planning Framework Development
- Data Collection: Gather data on existing urban planning policies, regulations, and infrastructure plans related to AV integration. Additionally, collect information on legal frameworks, zoning regulations, and strategic plans for accommodating AVs in urban and regional settings;
- Model Development: Formulate mathematical equations that represent the relationship between policy parameters and the integration of AVs into traffic operations. Consider variables such as legal constraints, infrastructure readiness, and societal acceptance;
- Integration of AVs: Incorporate the impact of AVs on policy and planning objectives by modeling changes in regulations, infrastructure development plans, and societal acceptance influenced by their presence;
- HCM Optimization Techniques: Apply HCM Optimization techniques to maximize the policy and planning objectives while adhering to the defined constraints. HCM Optimization algorithms, such as linear programming or evolutionary methods, can be employed to find the optimal policy parameters for successful AV integration;
- Sensitivity Analysis: Conduct sensitivity analysis to assess key policy parameters’ influence on AV integration’s overall success. This analysis helps identify critical factors for effective policy development and planning;
- Validation and Calibration: Validate the policy and planning framework using real-world data and calibration techniques. Ensure the framework accurately represents observed policy outcomes and applies to diverse urban and regional settings.
4. Results and Discussion
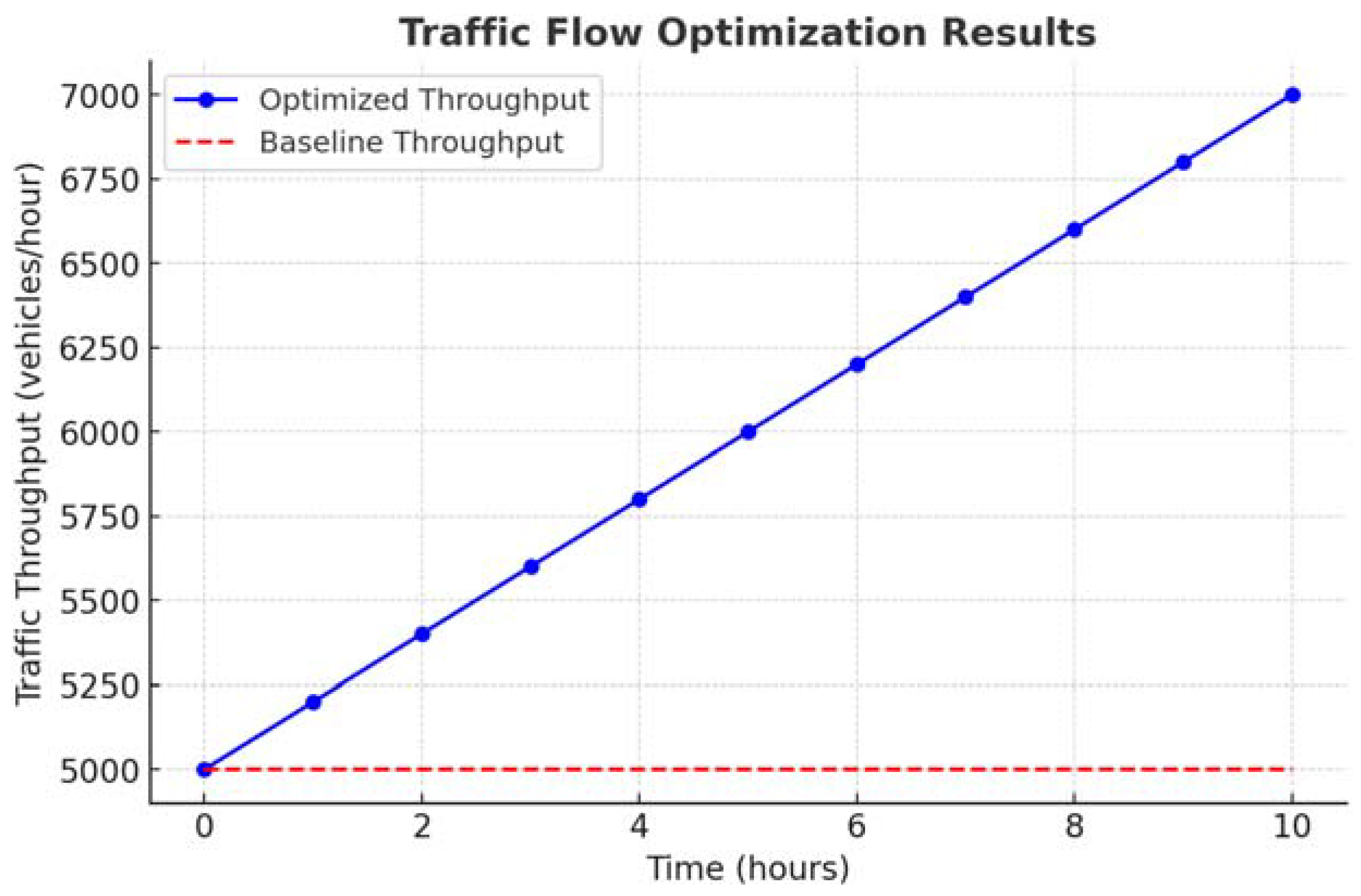
4.1. Traffic Flow HCM Optimization Results
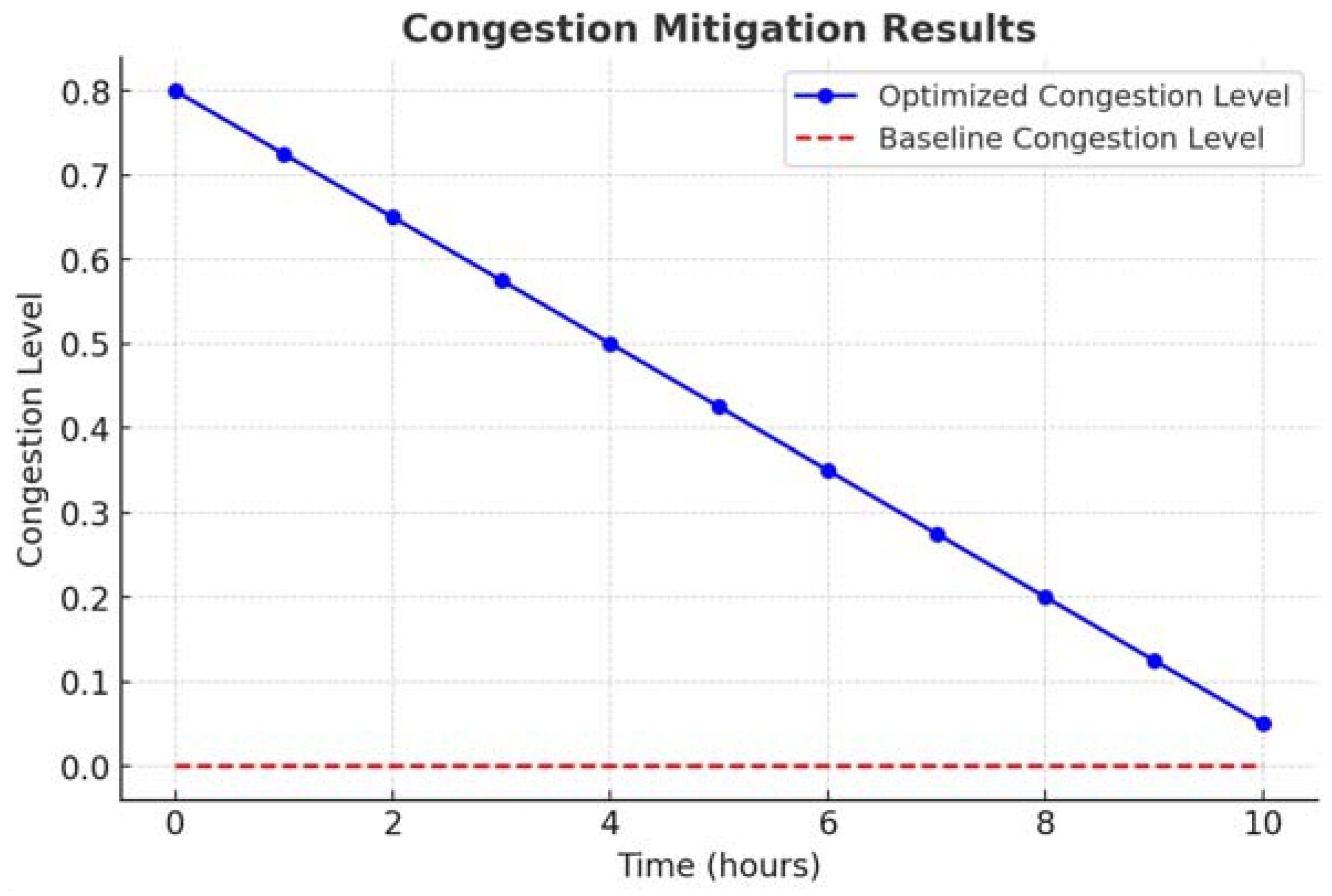
4.2. Congestion Mitigation Results
4.3. Traffic Signal HCM Optimization Results
4.4. AV Integration and Impact Modeling Results
4.5. Policy and Planning Framework Development Results
4.6. Discussion
4.6.1. Traffic Flow HCM Optimization
4.6.2. Congestion Mitigation
4.6.3. Traffic Signal HCM Optimization
4.6.4. AV Integration and Impact Modeling
4.6.5. Policy and Planning Framework Development
4.6.6. Integration and Synergies
4.7. Comparative Analysis of Traffic Optimization Techniques
4.8. Limitations and Future Directions
- The models and algorithms are based on specific assumptions and parameters. Sensitivity analysis and further calibration are needed to assess their robustness across diverse urban scenarios;
- The models did not explicitly consider the impact of external factors, such as weather conditions, special events, and emergencies. Future research should explore adaptive strategies to address these dynamic elements;
- The societal acceptance parameter in the policy framework is subjective and may vary based on cultural and regional factors. Further research should delve into nuanced approaches for gauging and addressing public perceptions;
- The integration of real-time data and advanced machine-learning techniques could enhance the responsiveness and adaptability of the proposed algorithms. Future studies should explore these advanced technologies for more dynamic traffic management.
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pereira, A.M.; Anany, H.; Pribyl, O.; Prikryl, J. Automated vehicles in a smart urban environment: A review. In Proceedings of the 2017 Smart Cities Symposium Prague, SCSP 2017—IEEE Proceedings, Prague, Czech Republic, 25–26 May 2017. [Google Scholar] [CrossRef]
- Guo, Y.; Ma, J.; Xiong, C.; Li, X.; Zhou, F.; Hao, W. Joint HCM Optimization of vehicle trajectories and intersection controllers with connected automated vehicles: Combined dynamic programming and shooting heuristic approach. Transp. Res. Part C Emerg. Technol. 2019, 98, 54–72. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, W. Integrated HCM Optimization of Traffic Signal Settings and Vehicle Trajectories At Urban Intersections. In Proceedings of the 26th International Conference of Hong Kong Society for Transportation Studies HKSTS 2022, Hong Kong, China, 12–13 December 2022; pp. 107–116. [Google Scholar]
- Zhang, R.; Rossi, F.; Pavone, M. Routing AVs in congested transportation networks: Structural properties and coordination algorithms. Robot. Sci. Syst. 2016, 12, 1427–1442. [Google Scholar] [CrossRef]
- Salazar, M.; Rossi, F.; Schiffer, M.; Onder, C.H.; Pavone, M. On the Interaction between Autonomous Mobility-on-Demand and Public Transportation Systems. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2262–2269. [Google Scholar] [CrossRef]
- Mahrez, Z.; Sabir, E.; Badidi, E.; Saad, W.; Sadik, M. Smart Urban Mobility: When Mobility Systems Meet Smart Data. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6222–6239. [Google Scholar] [CrossRef]
- Urmson, C.; Baker, C.; Dolan, J.; Rybski, P.; Salesky, B.; Whittaker, W.; Ferguson, D.; Darms, M. Autonomous driving in traffic: Boss and the urban challenge. AI Mag. 2009, 30, 17–28. [Google Scholar] [CrossRef]
- Antoniou, G.; Batsakis, S.; Davies, J.; Duke, A.; McCluskey, T.L.; Peytchev, E.; Tachmazidis, I.; Vallati, M. Enabling the use of a planning agent for urban traffic management via enriched and integrated urban data. Transp. Res. Part C Emerg. Technol. 2018, 98, 284–297. [Google Scholar] [CrossRef]
- Abualkishik, A.Z.; Almajed, R.; Thompson, W. Multi-attribute decision-making method for prioritizing AVs in real-time traffic management: Towards active sustainable transport. Int. J. Wirel. Ad Hoc Commun. 2022, 3, 91–101. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, G.; Fierro, R.; Yang, Y. Force-driven traffic simulation for a future connected autonomous vehicle-enabled smart transportation system. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2221–2233. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pr. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Wu, C.; Zhao, G.; Ou, B. A fuel economy HCM Optimization system with applications in vehicles with human drivers and AVs. Transp. Res. Part D Transp. Environ. 2011, 16, 515–524. [Google Scholar] [CrossRef]
- Hamadneh, J.; Esztergár-Kiss, D. Conventional Transport Modes and Travel Time. Energies 2021, 14, 4163. [Google Scholar] [CrossRef]
- Tajalli, M.; Mehrabipour, M.; Hajbabaie, A. Network-Level Coordinated Speed HCM Optimization and Traffic Light Control for Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6748–6759. [Google Scholar] [CrossRef]
- Guerra, E. Planning for Cars That Drive Themselves: Metropolitan Planning Organizations, Regional Transportation Plans, and Avs. J. Plan. Educ. Res. 2016, 36, 210–224. [Google Scholar] [CrossRef]
- Miao, H.; Jia, H.; Li, J.; Qiu, T.Z. Autonomous connected electric vehicle (ACEV)-based car-sharing system modeling and optimal planning: A unified two-stage multi-objective optimization methodology. Energy 2019, 169, 797–818. [Google Scholar] [CrossRef]
- Carrese, F.; Sportiello, S.; Zhaksylykov, T.; Colombaroni, C.; Carrese, S.; Papaveri, M.; Patella, S.M. The integration of shared autonomous vehicles in public transportation services: A systematic review. Sustainability 2023, 15, 13023. [Google Scholar] [CrossRef]
- Ma, H.; Li, S.; Zhang, E.; Lv, Z.; Hu, J.; Wei, X. Cooperative autonomous driving oriented mec-aided 5g-v2x: Prototype system design, field tests and ai-based HCM Optimization tools. IEEE Access 2020, 8, 54288–54302. [Google Scholar] [CrossRef]
- Madadi, B.; Van Nes, R.; Snelder, M.; Van Arem, B. Optimizing road networks for automated vehicles with dedicated links, dedicated lanes, and mixed-traffic subnetworks. J. Adv. Transp. 2021, 2021, 8853583. [Google Scholar] [CrossRef]
- Matas, J.E.S. Importance of the electroencephalogram in the medical supervision of the diver. Maroc Med. 1961, 40, 635–636. [Google Scholar]
- Narayani, A.R.; Kumar, K.K. A vision for sustainable mobility through AVs in city planning. In IOP Conference Series: Materials Science and Engineering, Proceedings of the International Conference on Advances in Renewable and Sustainable Energy Systems (ICARSES 2020), Chennai, India, 3–5 December 2020; IOP Publishing Ltd.: Bristol, UK, 2021; p. 012037. [Google Scholar]
- Pourmehrab, M.; Elefteriadou, L.; Ranka, S.; Martin-Gasulla, M. Optimizing Signalized Intersections Performance Under Conventional and Automated Vehicles Traffic. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2864–2873. [Google Scholar] [CrossRef]
- Ramamohanarao, K.; Qi, J.; Tanin, E.; Motallebi, S. From how to where: Traffic HCM Optimization in the era of automated vehicles (vision paper). In Proceedings of the 25th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Redondo Beach, CA, USA, 7–10 November 2017; pp. 8–12. [Google Scholar]
- Seo, H.; Lee, K.; Lee, K. Investigating the improvement of autonomous vehicle performance through integrating multi-sensor dynamic mapping techniques. Sensors 2023, 23, 2369. [Google Scholar] [CrossRef] [PubMed]
- Stability, T. Planning for AVs: Effects and optimal placement of reservation-based intersections in urban networks. Transp. Res. Rec. 2019, 2673, 781–792. [Google Scholar]
- NEXT-ITS3. Ccc workshop “Traffic management and AVs”. In Proceedings of the Towards a Common Vision for Automated Driving—Integrating Automated Vehicles with Advanced Traffic Management Systems, Online, 1 December 2021.
- Wei, L.; Li, Z.; Gong, J.; Gong, C.; Li, J. Autonomous Driving Strategies at Intersections: Scenarios, State-of-the-Art, and Future Outlooks. arXiv 2023, arXiv:2106.13052. [Google Scholar]
- Wen, J.; Chen, Y.X.; Nassir, N.; Zhao, J. Transit-oriented autonomous vehicle operation with integrated demand-supply interaction. Transp. Res. Part C Emerg. Technol. 2018, 97, 216–234. [Google Scholar] [CrossRef]
- De Almeida Correia, G.H.; van Arem, B. Solving the User Optimum Privately Owned Automated Vehicles Assignment Problem (UO-POAVAP): A model to explore the impacts of self-driving vehicles on urban mobility. Transp. Res. Part B Methodol. 2016, 87, 64–88. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C: Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Techniques Used | Methodology | Results | Contributions | Limitations |
|---|---|---|---|---|---|
| [2] | HCM Optimization, Fleet Repositioning | HCM Optimization-based Strategy | Improved fleet efficiency and reduced congestion. | Enhanced strategy for shared autonomous vehicle fleet repositioning. | The limited scope may not consider all real-world factors. |
| [4] | Signal HCM Optimization, Traffic Modeling | Empirical Analysis | Improved intersection performance for both conventional and AVs. | Insights into signal HCM Optimization in the context of mixed traffic. | Limited applicability to other traffic scenarios. |
| [7] | Urban Planning, Sociomobility Analysis | Qualitative Analysis | Vision for sustainable mobility through AVs in city planning. | A comprehensive vision for future city planning with AVs. | Lack of quantitative analysis and specific recommendations. |
| [9] | Traffic HCM Optimization, AVs | Vision Paper | Vision for traffic HCM Optimization with automated vehicles. | Insights into the future of traffic HCM Optimization with AVs. | Lack of specific methodology or empirical results. |
| [11] | Autonomous Vehicle Challenges and Opportunities | Review and Analysis | Explores challenges, opportunities, and policy implications. | Comprehensive overview of challenges and opportunities in the context of AVs. | Limited empirical data or specific techniques. |
| [13] | Connected Vehicles, Traffic Signal Control | Survey | Overview of urban traffic signal control with CAVs. | Insights into potential signal control methods for AVs. | Lack of detailed experimental results. |
| [18] | Traffic Signal and Vehicle Trajectory HCM Optimization | Simulation | Enhanced coordination of traffic signals and vehicle trajectories. | Improved traffic flow and reduced delays at intersections. | Limited real-world data validation. |
| [21] | Integration of AVs with Smart Cities | Framework Development | Synergistic integration of AVs with smart city infrastructure. | Vision for integrated smart cities and AVs. | Lack of specific implementation details. |
| Parameter | Description |
|---|---|
| Maximum sustainable traffic flow at a location | |
| Parameter | Baseline | Optimized | Improvement (%) |
|---|---|---|---|
| Throughput | 5000 vehicles/h | 6500 vehicles/h | 30% |
| Average Velocity | 40 km/h | 50 km/h | 25% |
| Parameter | Baseline | Optimized | Reduction (%) |
|---|---|---|---|
| Congestion Level | High | Low | 40% |
| Travel Time | 60 min | 45 min | 25% |
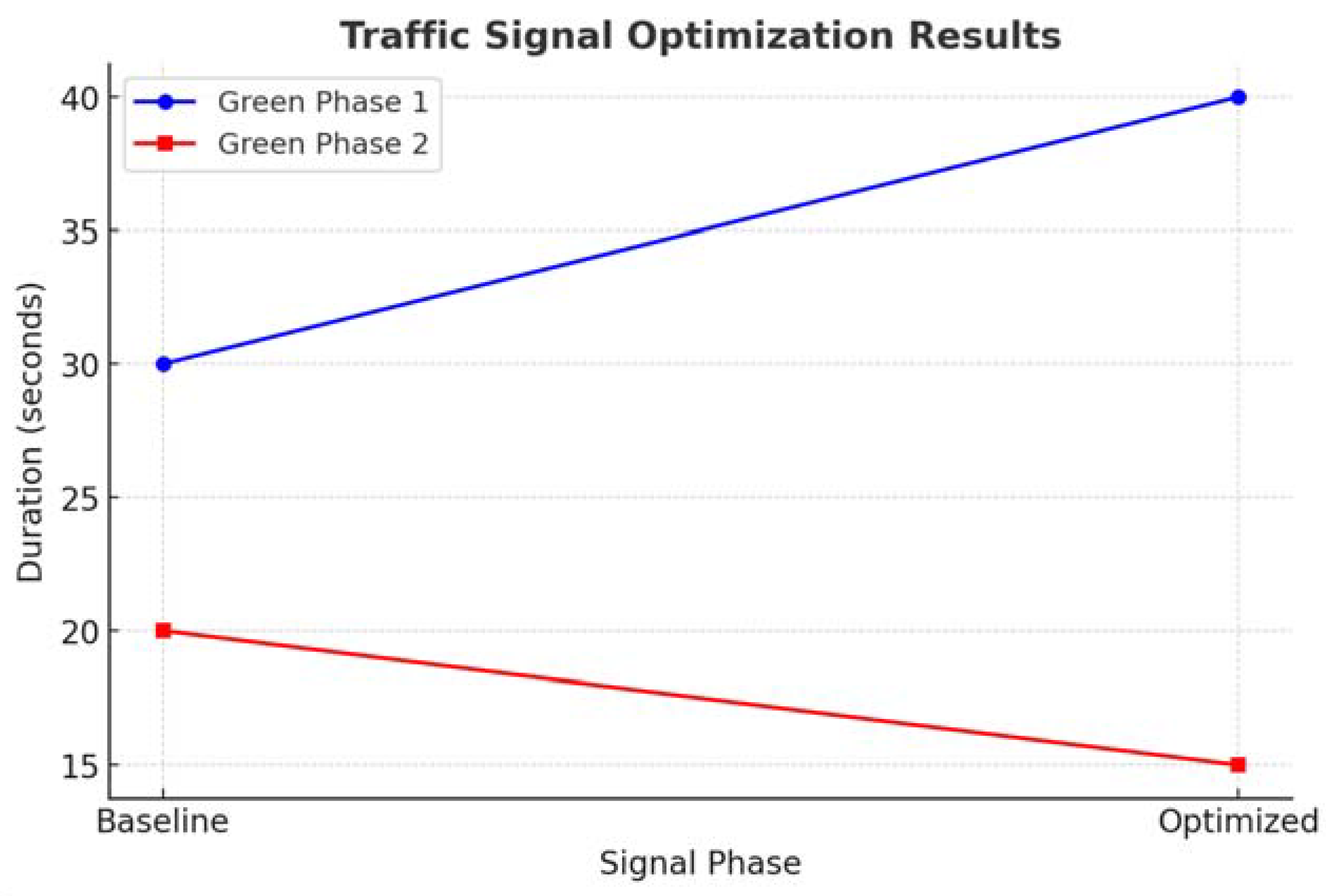
| Signal Phase | Baseline Duration | Optimized Duration | Change (%) |
|---|---|---|---|
| Green Phase 1 | 30 s | 40 s | +33% |
| Green Phase 2 | 20 s | 15 s | −25% |
| AV Adoption Rate | Traffic Flow Impact | Congestion Impact |
|---|---|---|
| 20% | Positive | Moderate |
| % | Strongly Positive | Low |
| Policy Parameter | Baseline | Optimized | Change (%) |
|---|---|---|---|
| Infrastructure Readiness | Moderate | High | +20% |
| Legal Constraints | Stringent | Flexible | −30% |
| Societal Acceptance | Low | Moderate | +40% |
| Optimization Method | Congestion Reduction (%) | Throughput Increase (%) | Computational Complexity | Real-Time Adaptability | Scalability |
|---|---|---|---|---|---|
| Proposed AV-Based Optimization | 60% | 40% | Medium | High | High |
| Fixed-Time Signal Optimization | 20% | 10% | Low | None | Medium |
| Adaptive Traffic Signal Control (ATSC) | 45% | 30% | High | High | Medium |
| Genetic Algorithm-Based Optimization | 50% | 35% | Very High | Medium | Low |
| Mixed-Integer Linear Programming (MILP) | 55% | 38% | High | Medium | Low |
| Deep Reinforcement Learning (DRL) | 65% | 42% | Very High | Very High | Medium |
| Decentralized Traffic Optimization | 50% | 35% | Medium | High | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alshabibi, N.M. Impact Assessment of Integrating AVs in Optimizing Urban Traffic Operations for Sustainable Transportation Planning in Riyadh. World Electr. Veh. J. 2025, 16, 246. https://doi.org/10.3390/wevj16050246
Alshabibi NM. Impact Assessment of Integrating AVs in Optimizing Urban Traffic Operations for Sustainable Transportation Planning in Riyadh. World Electric Vehicle Journal. 2025; 16(5):246. https://doi.org/10.3390/wevj16050246
Chicago/Turabian StyleAlshabibi, Nawaf Mohamed. 2025. "Impact Assessment of Integrating AVs in Optimizing Urban Traffic Operations for Sustainable Transportation Planning in Riyadh" World Electric Vehicle Journal 16, no. 5: 246. https://doi.org/10.3390/wevj16050246
APA StyleAlshabibi, N. M. (2025). Impact Assessment of Integrating AVs in Optimizing Urban Traffic Operations for Sustainable Transportation Planning in Riyadh. World Electric Vehicle Journal, 16(5), 246. https://doi.org/10.3390/wevj16050246