Combining Satellite and UAV Imagery to Delineate Forest Cover and Basal Area after Mixed-Severity Fires


Abstract
:1. Introduction
2. Materials and Methods
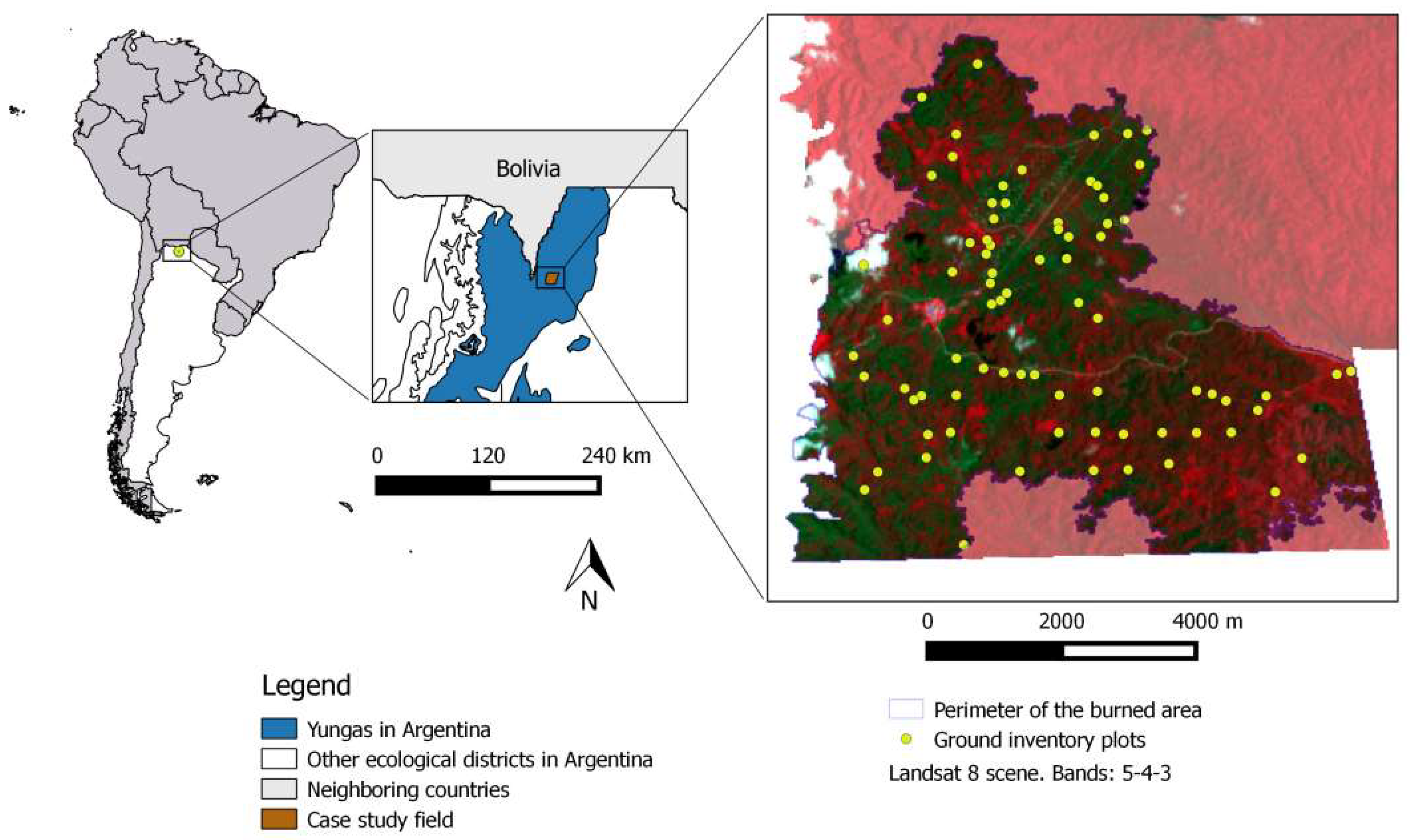
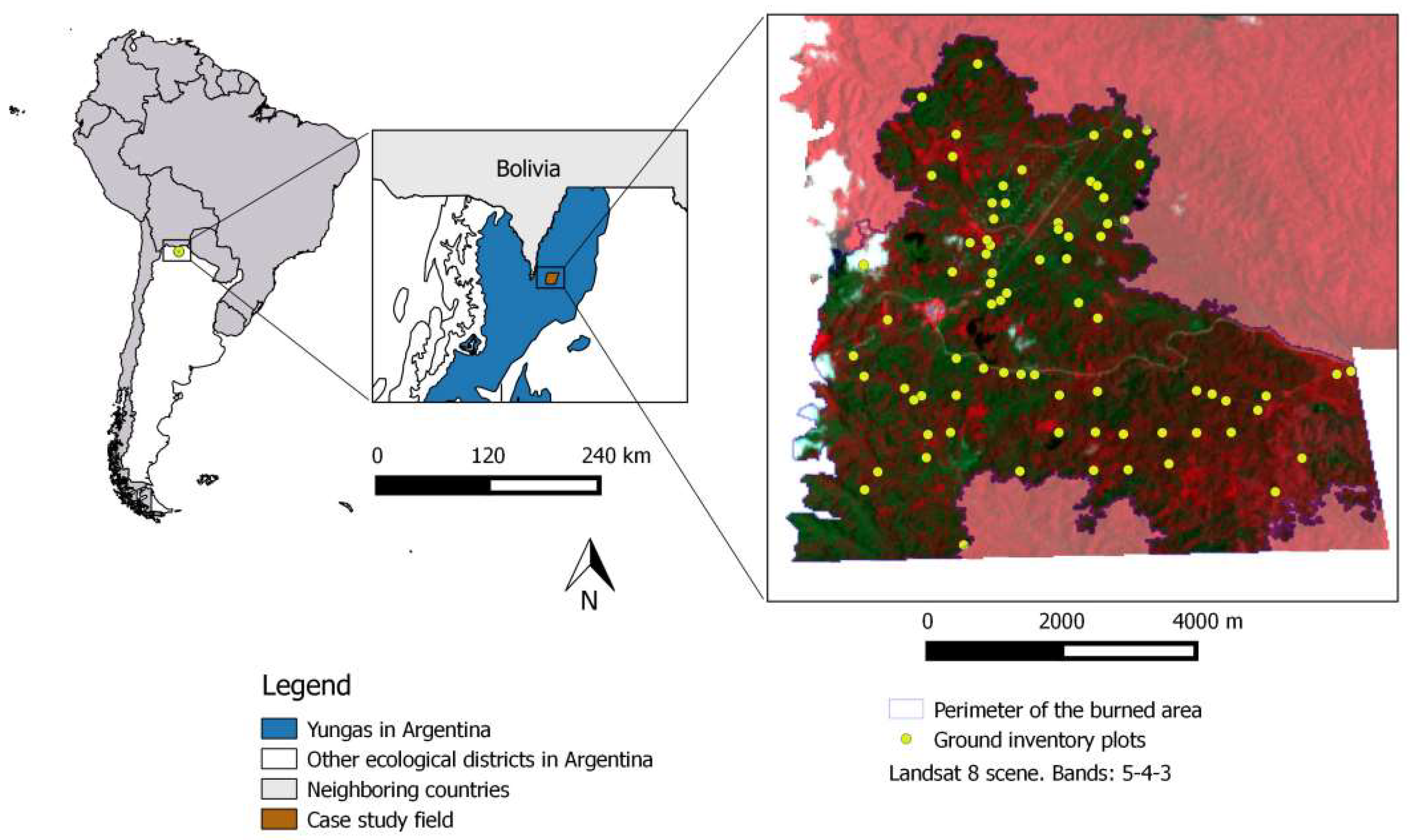
2.1. Study Area
2.2. Plot-Based Field Inventory
2.3. UAV Imagery Acquisition
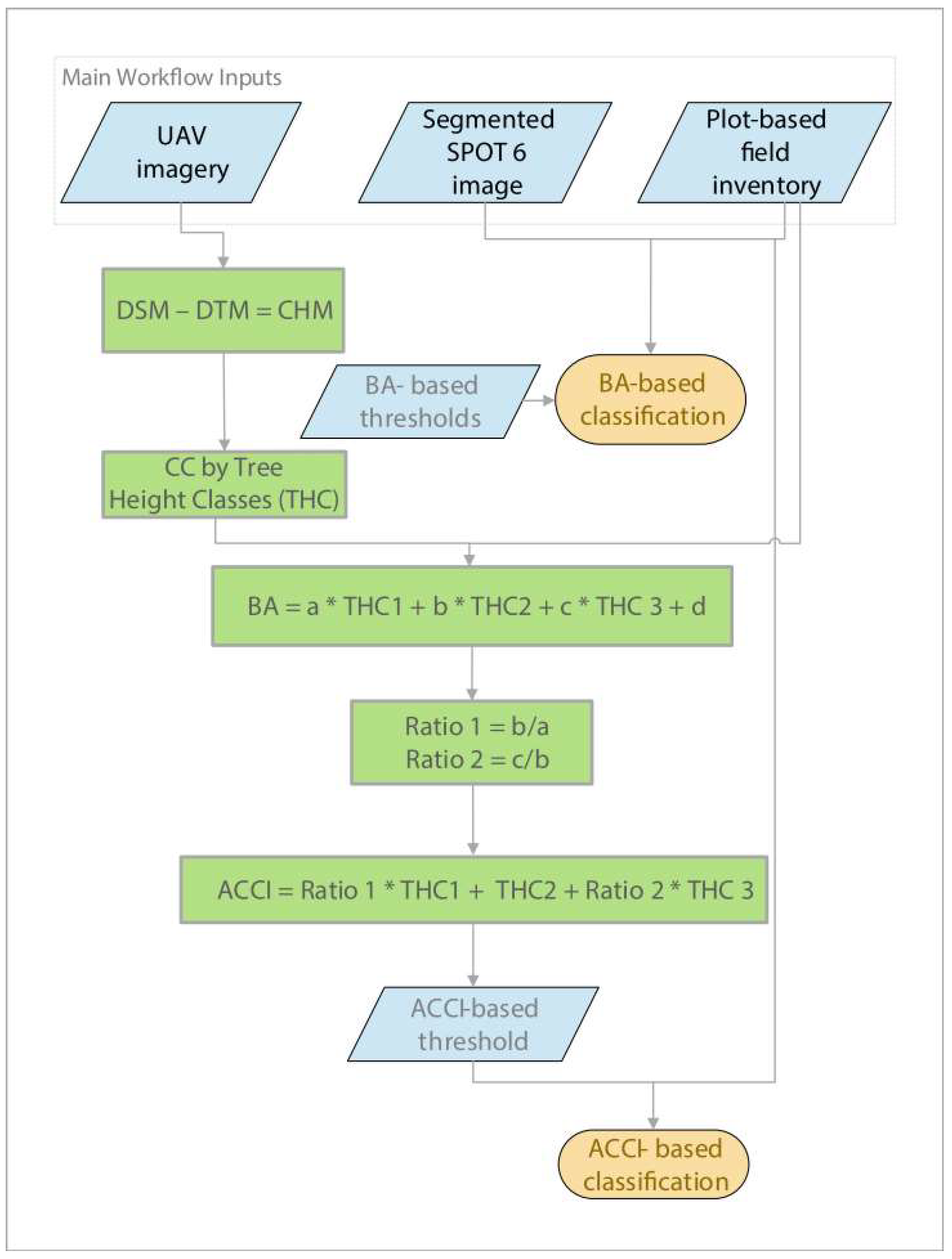
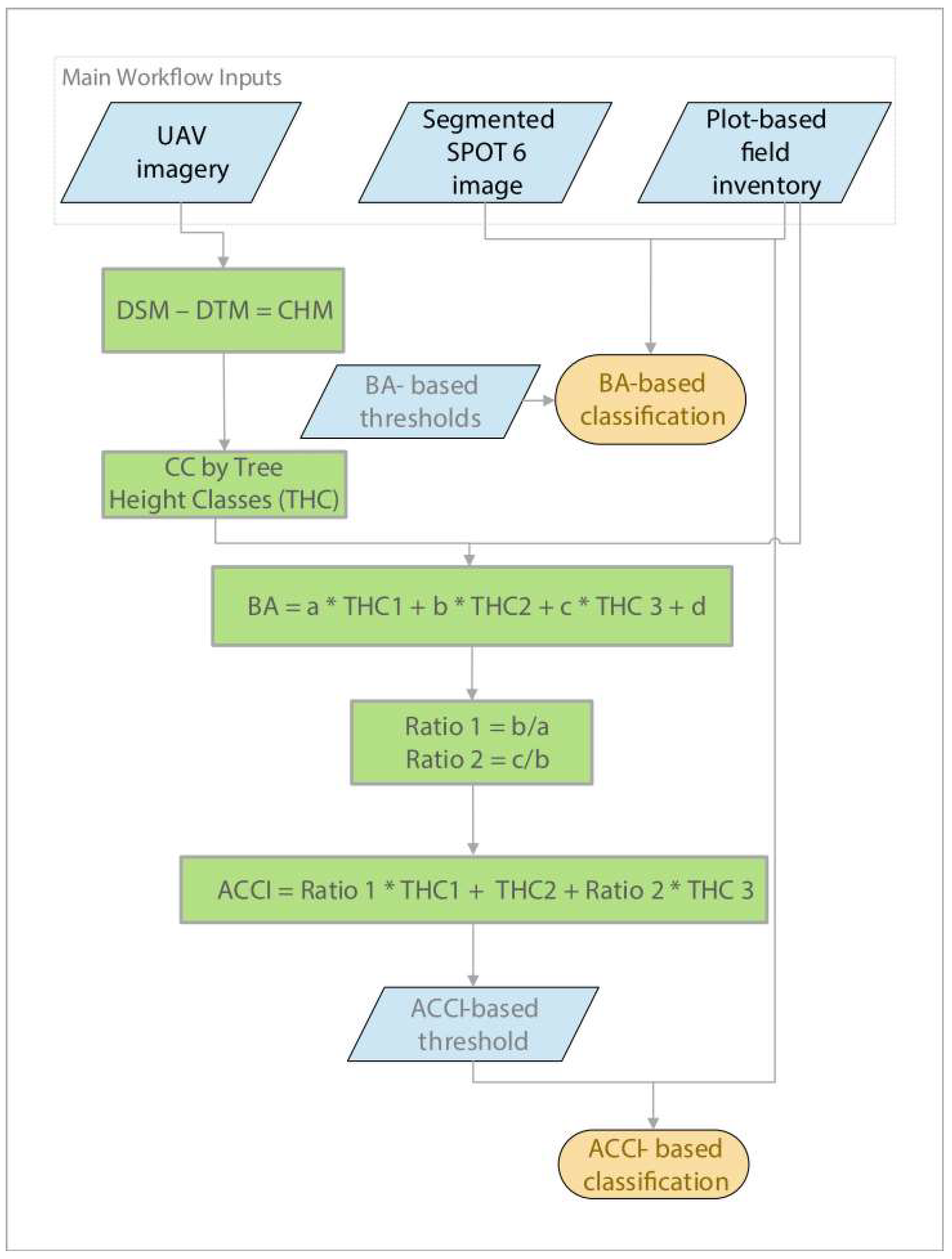
2.4. Workflow
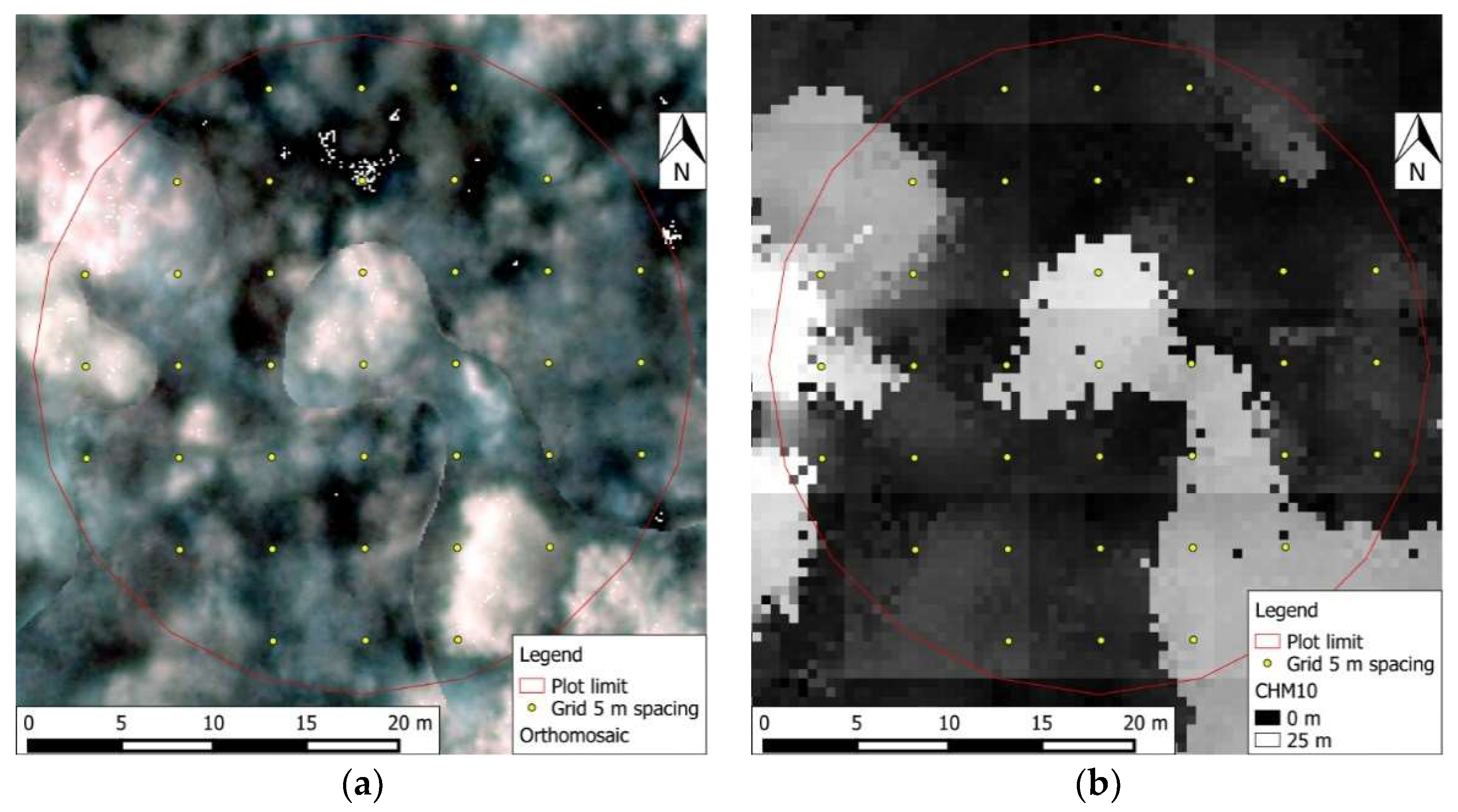
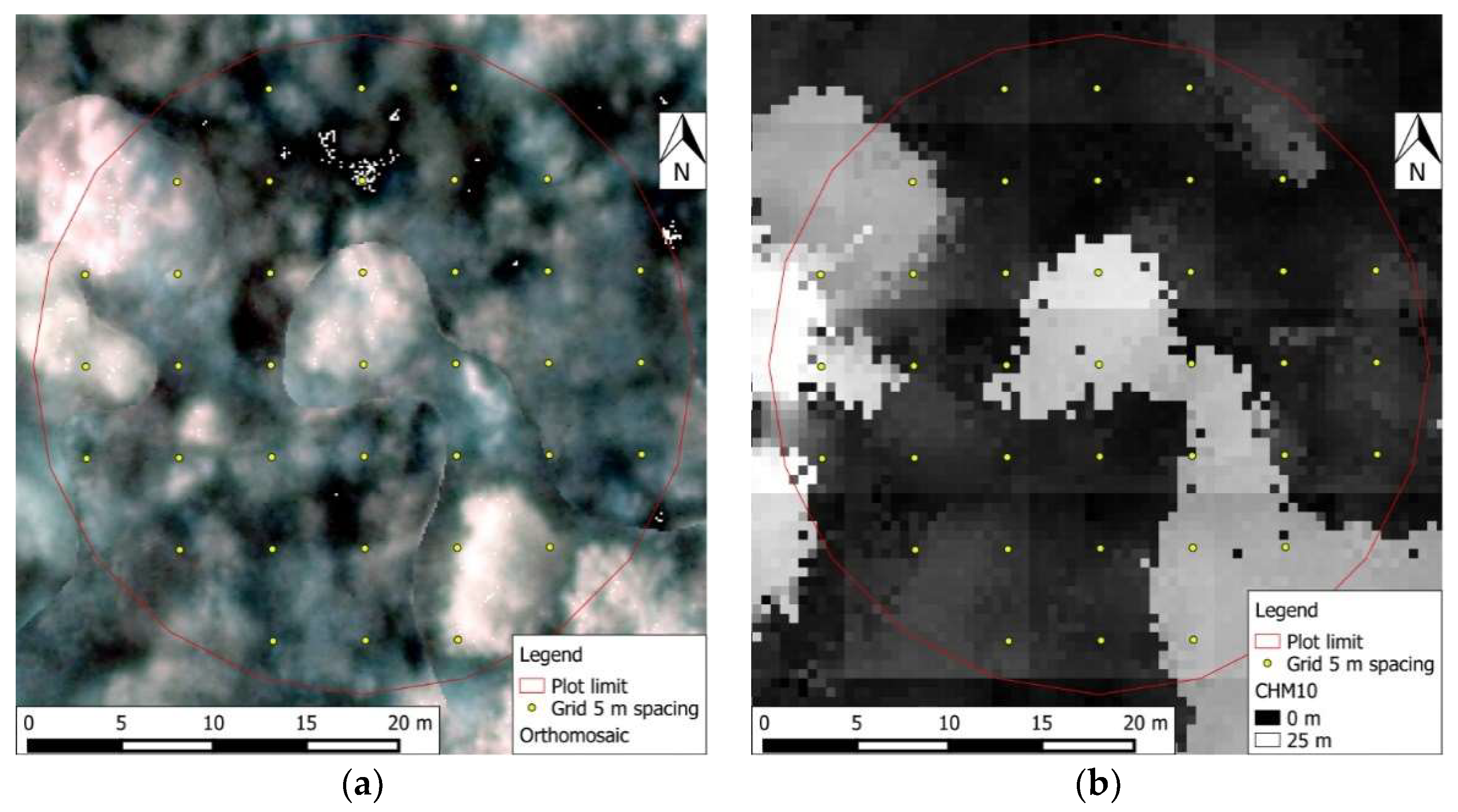
2.4.1. Photogrammetric Processing
2.4.2. Tree Height and Adjusted Canopy Cover Index
- THC1: CC from tree heights between 5 and 10 m
- THC2: CC from tree heights between 10 and 20 m
- THC3: CC from trees higher than 20 m
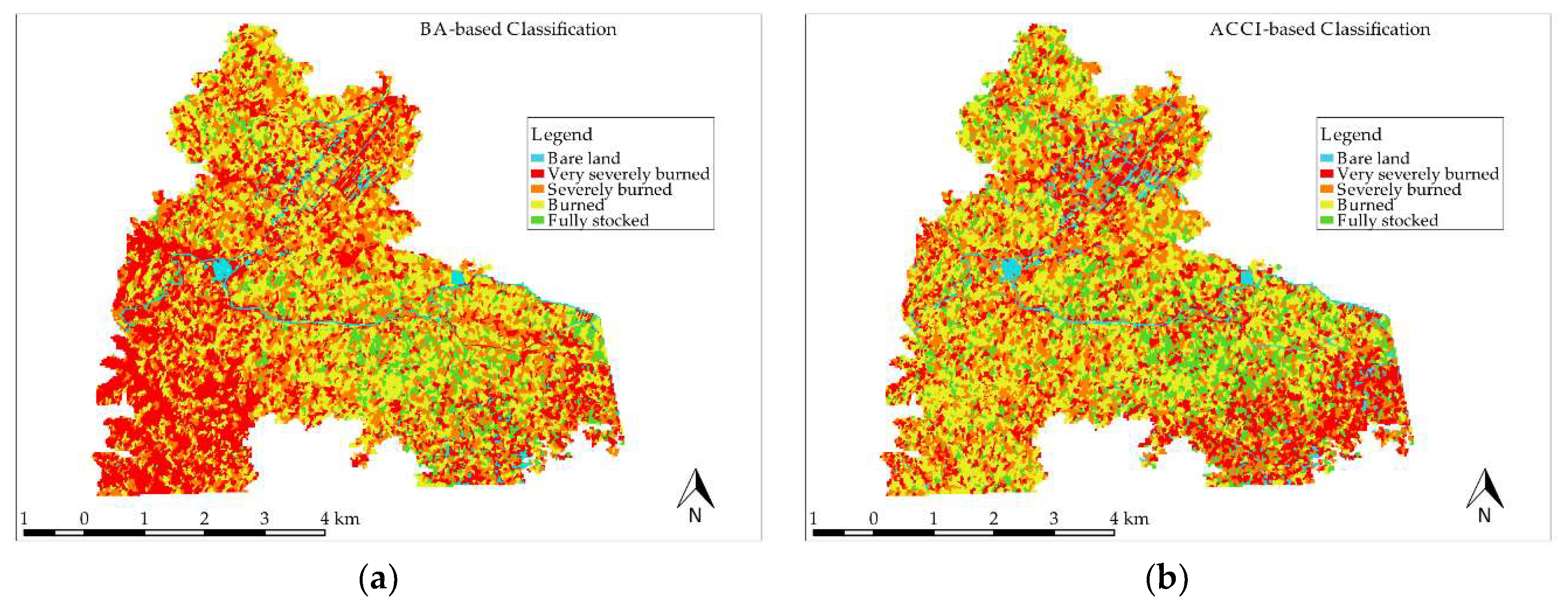
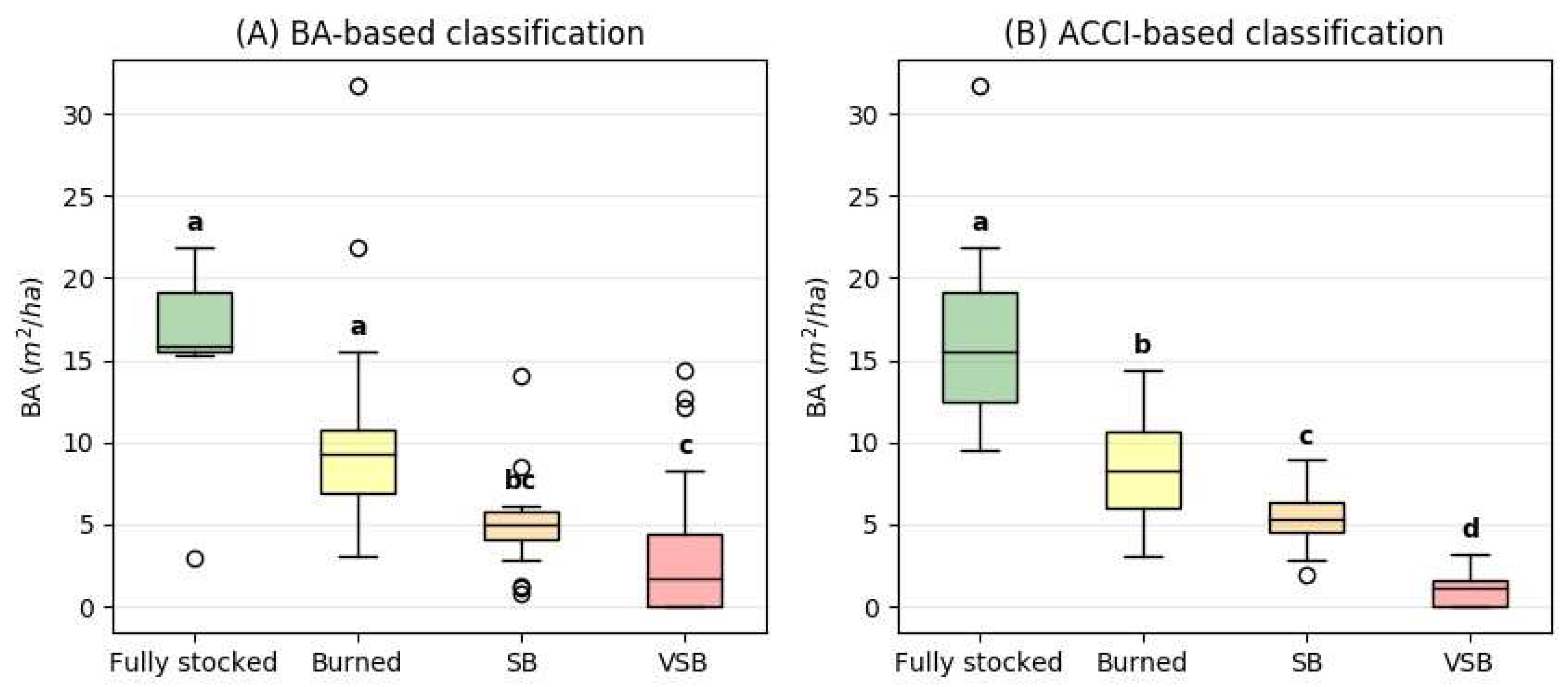
2.4.3. Image Classification
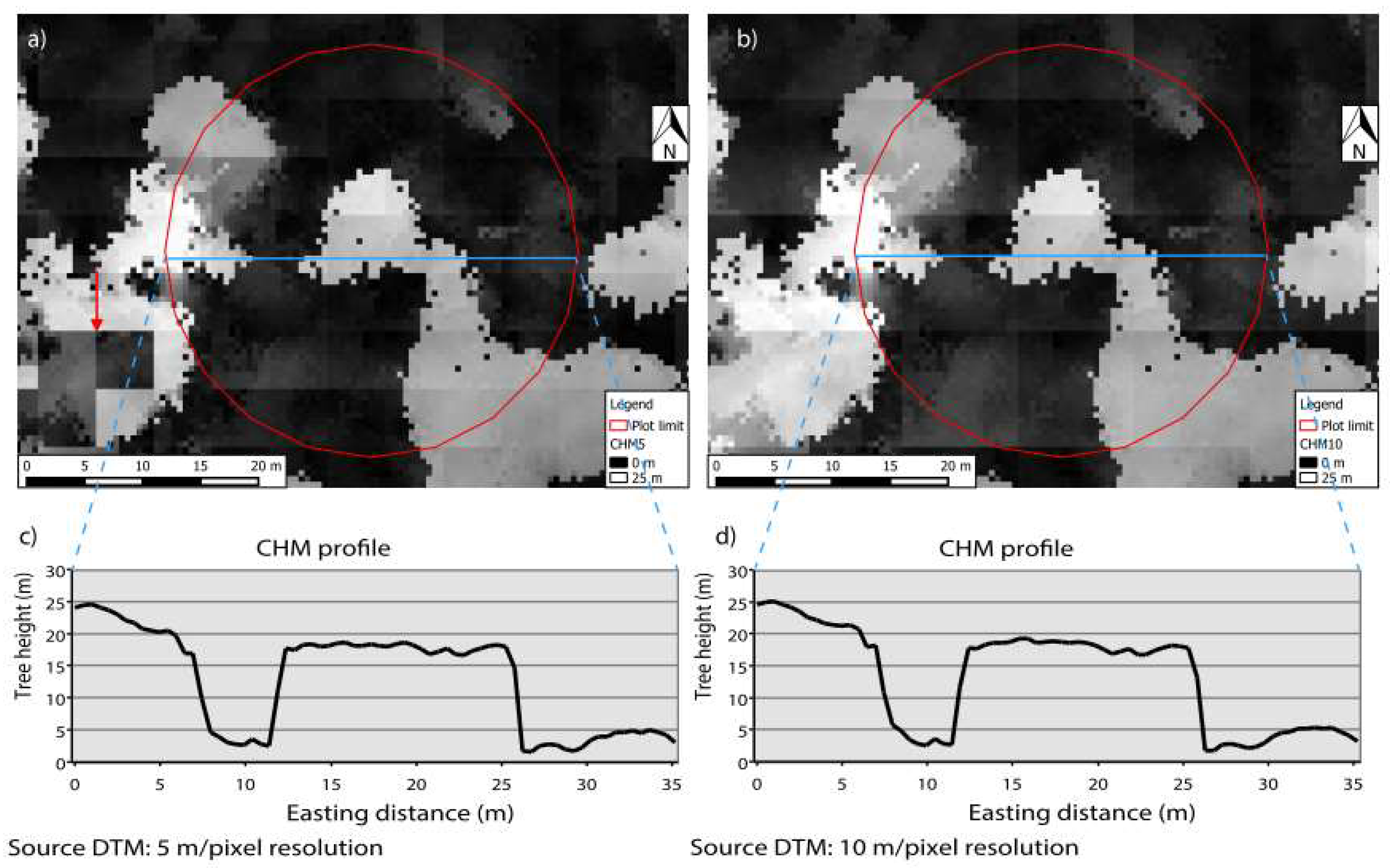
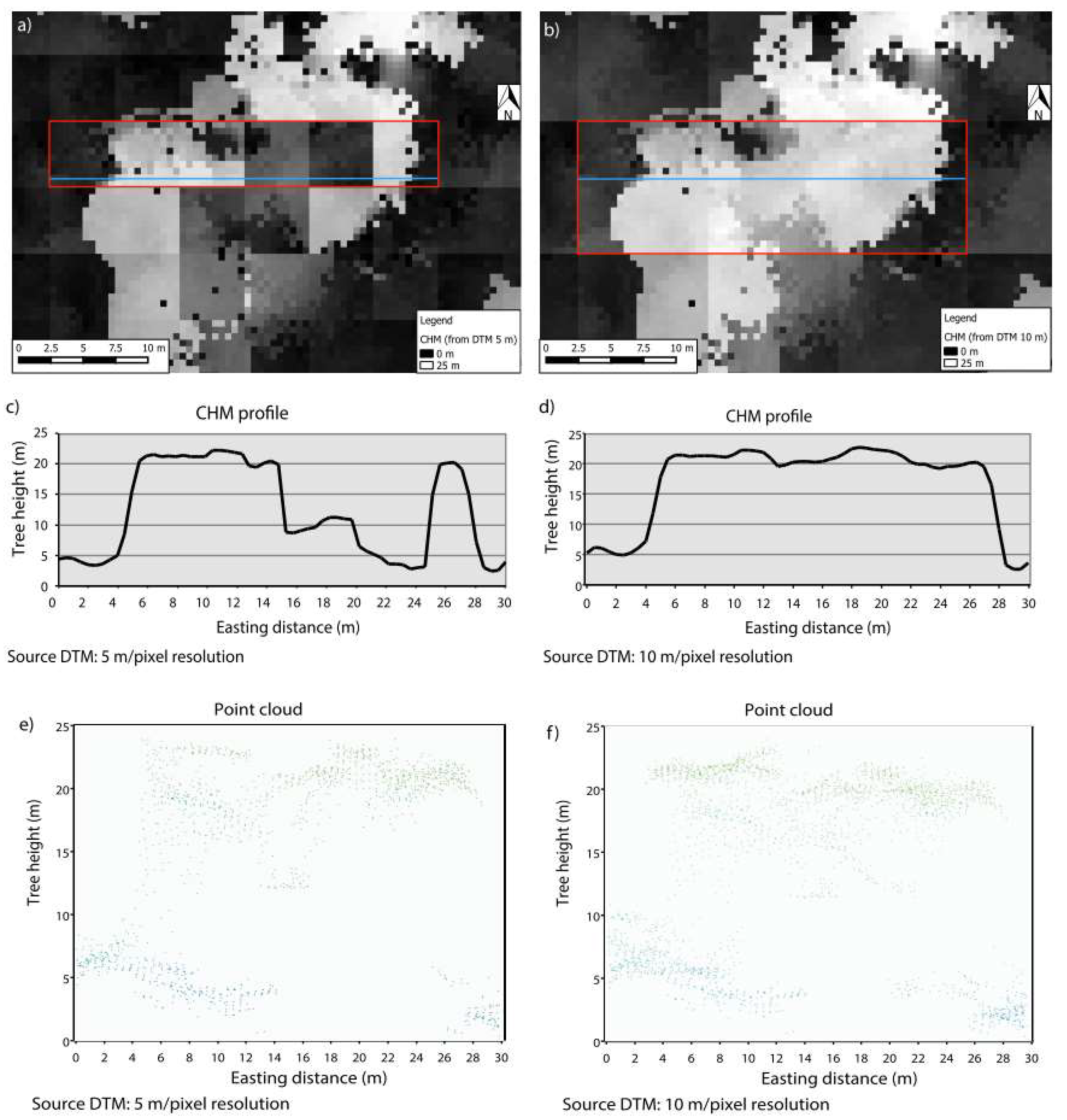
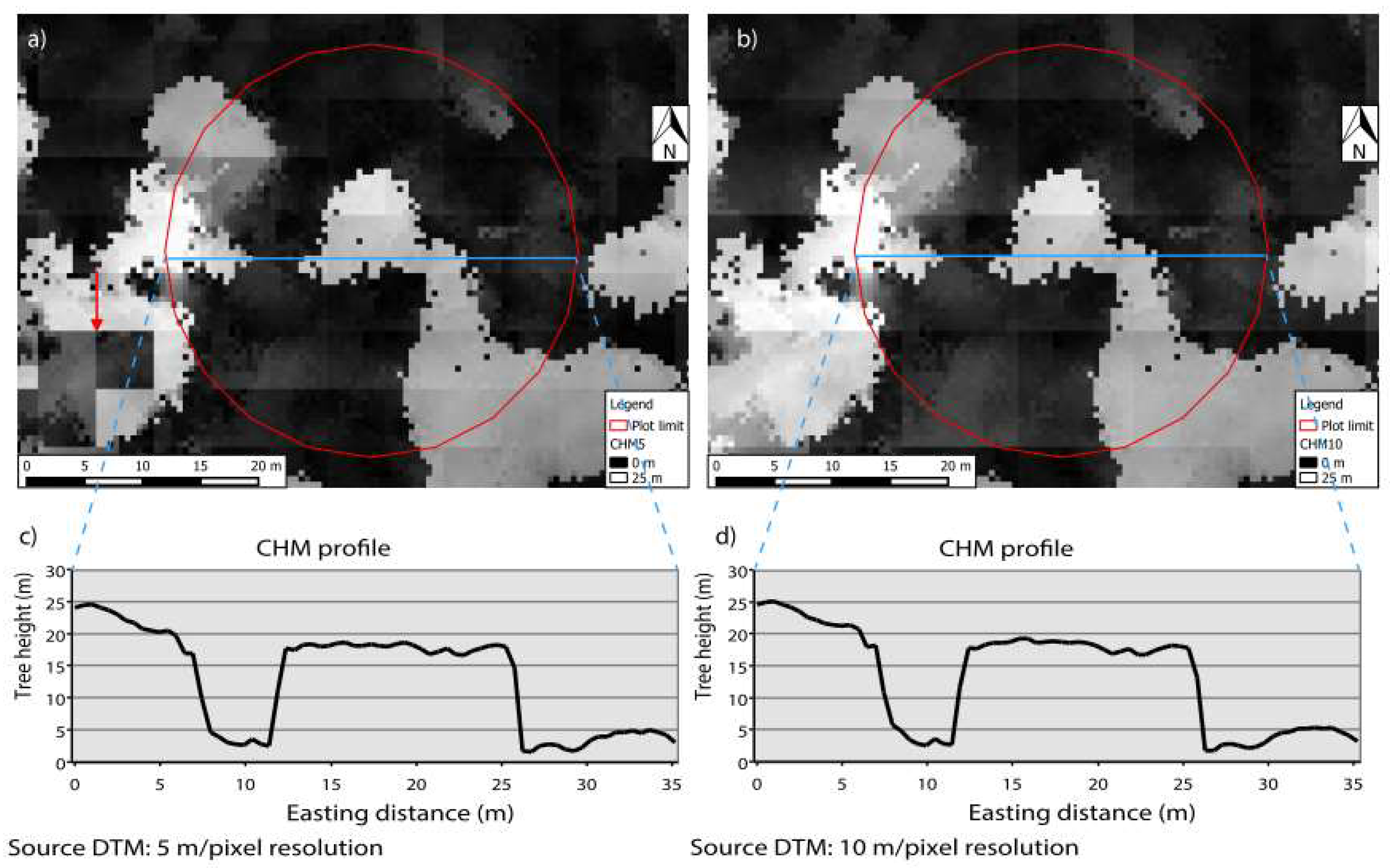
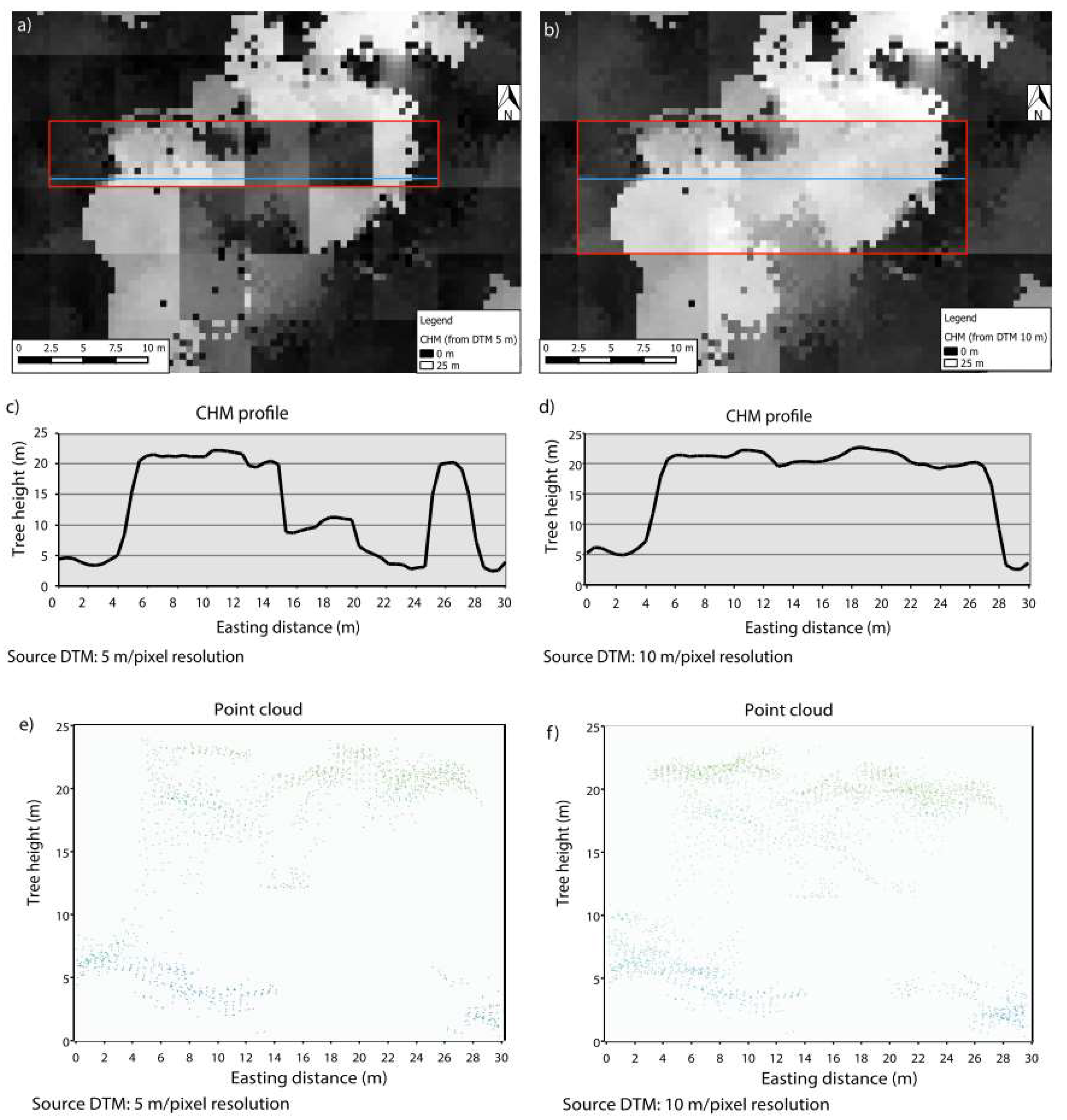
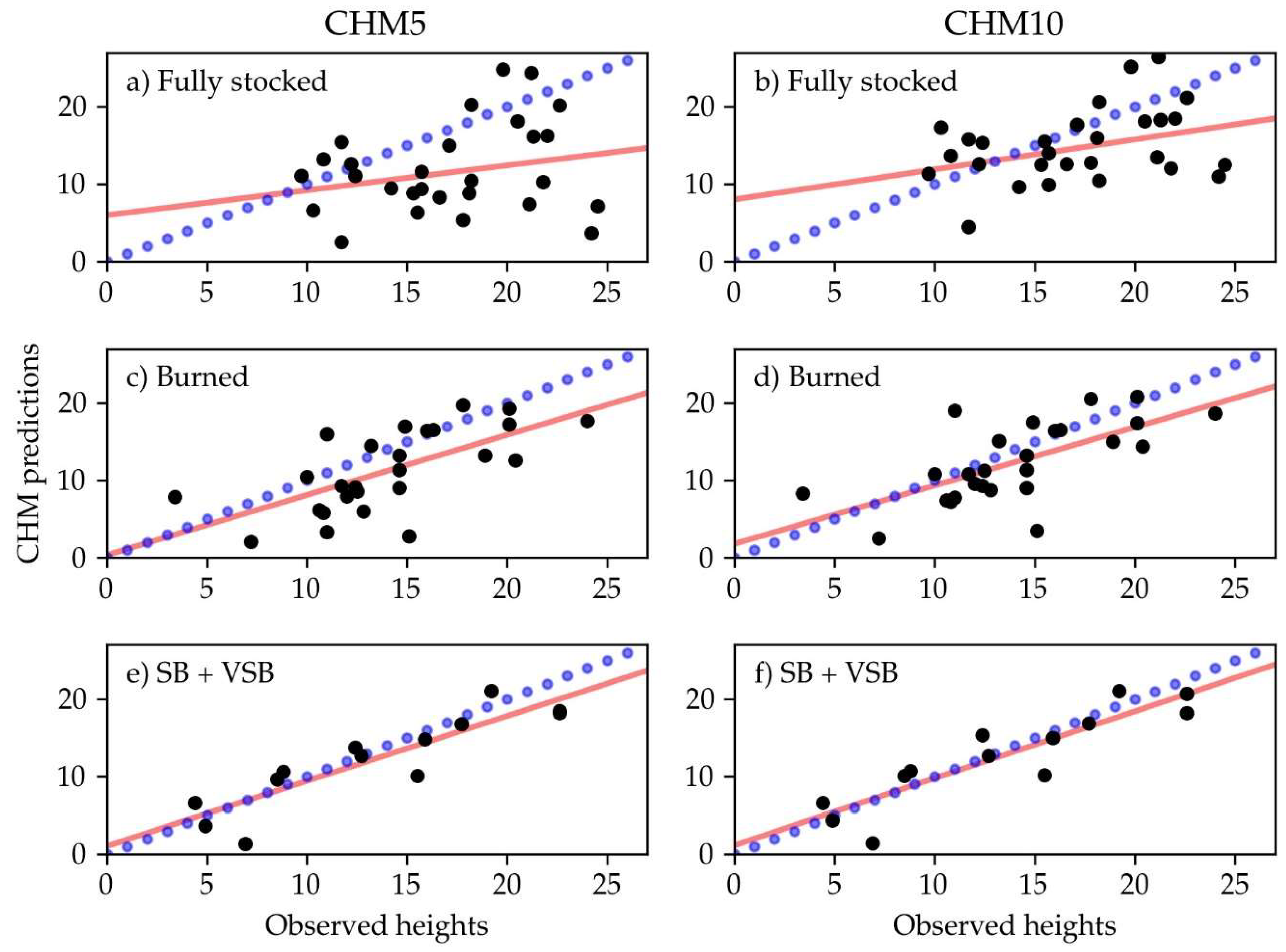
2.4.4. Validation of CHMs
3. Results
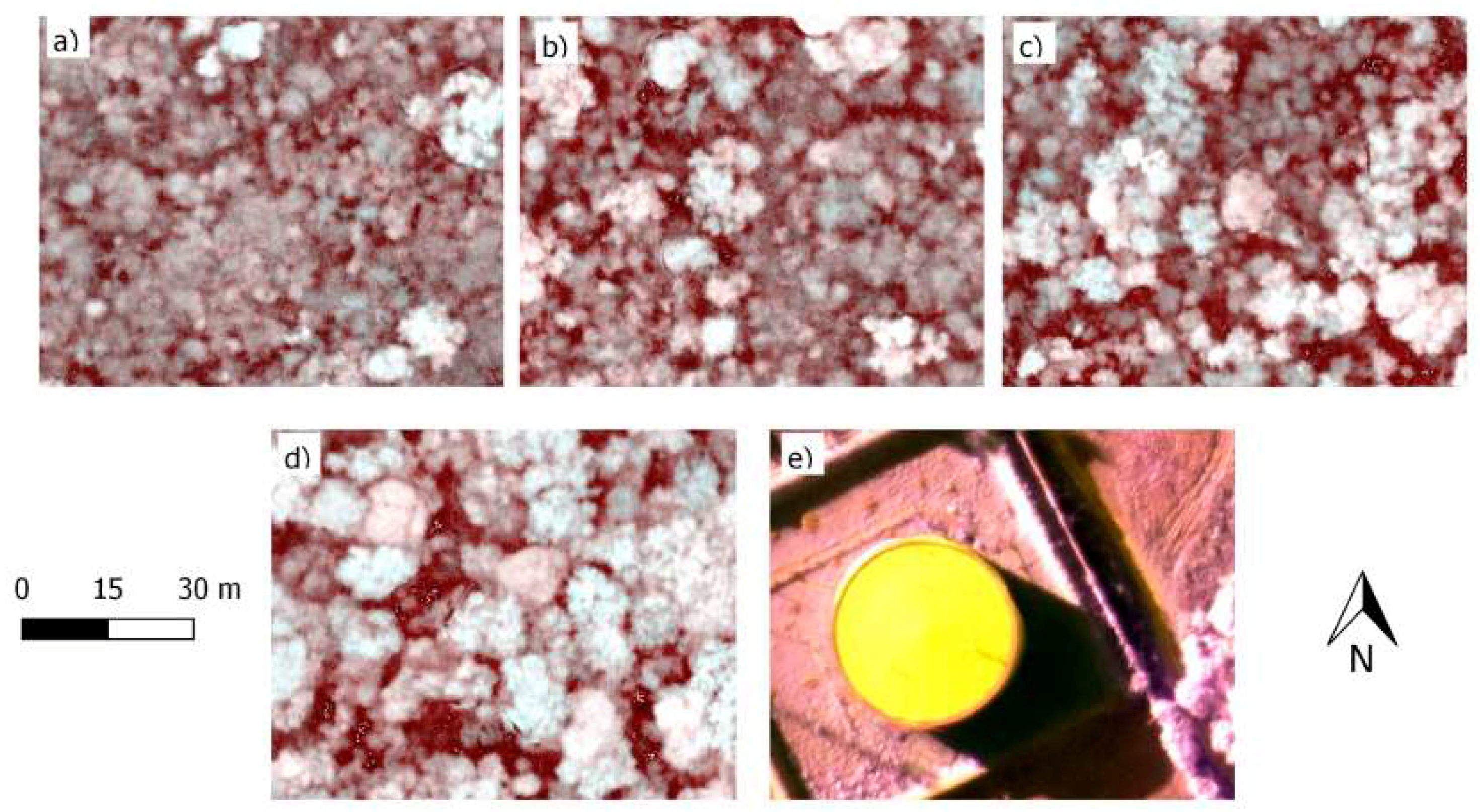
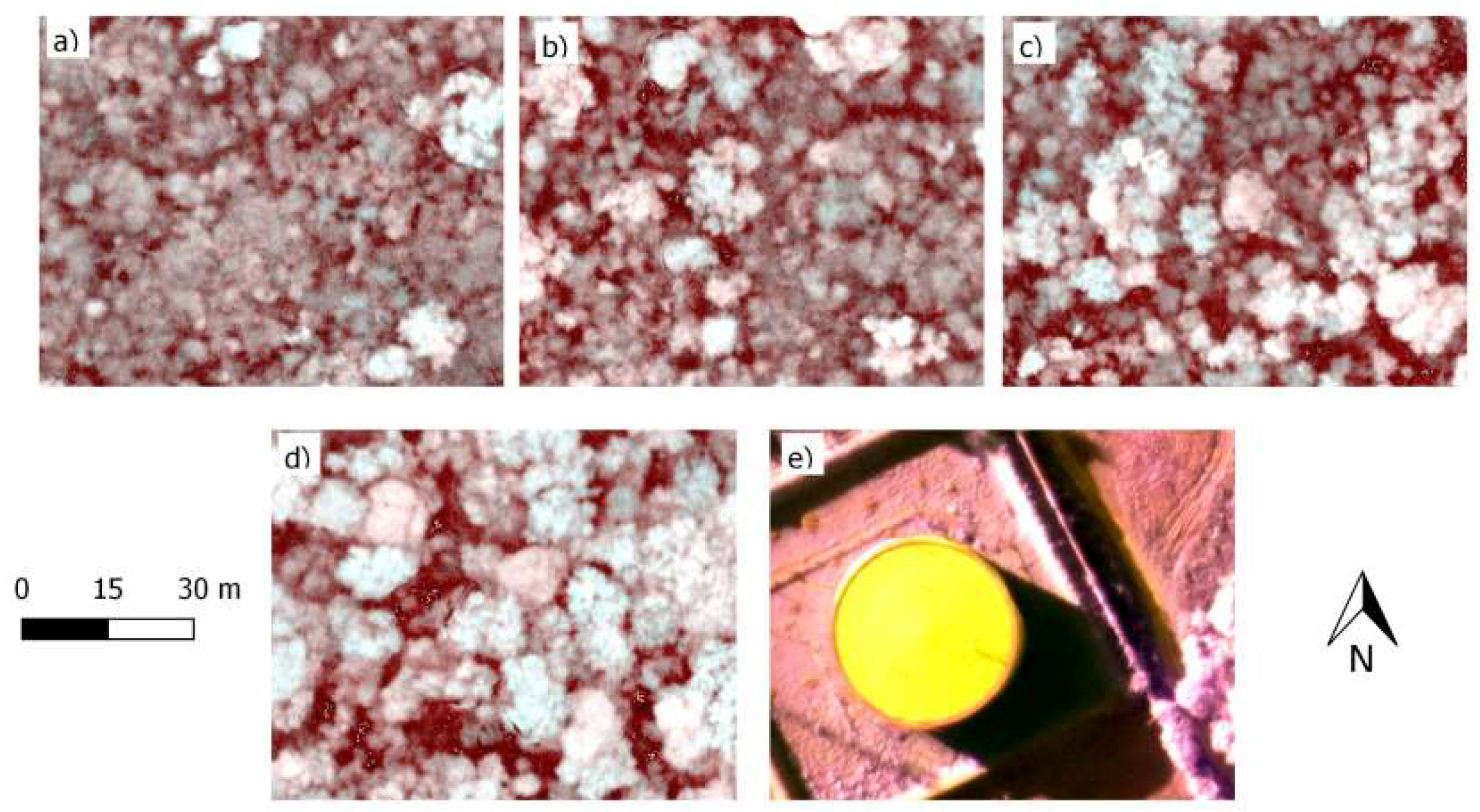
3.1. UAV Image Acquisition
3.2. Photogrammetric Processing
3.3. Tree Height and Adjusted Canopy Cover Index
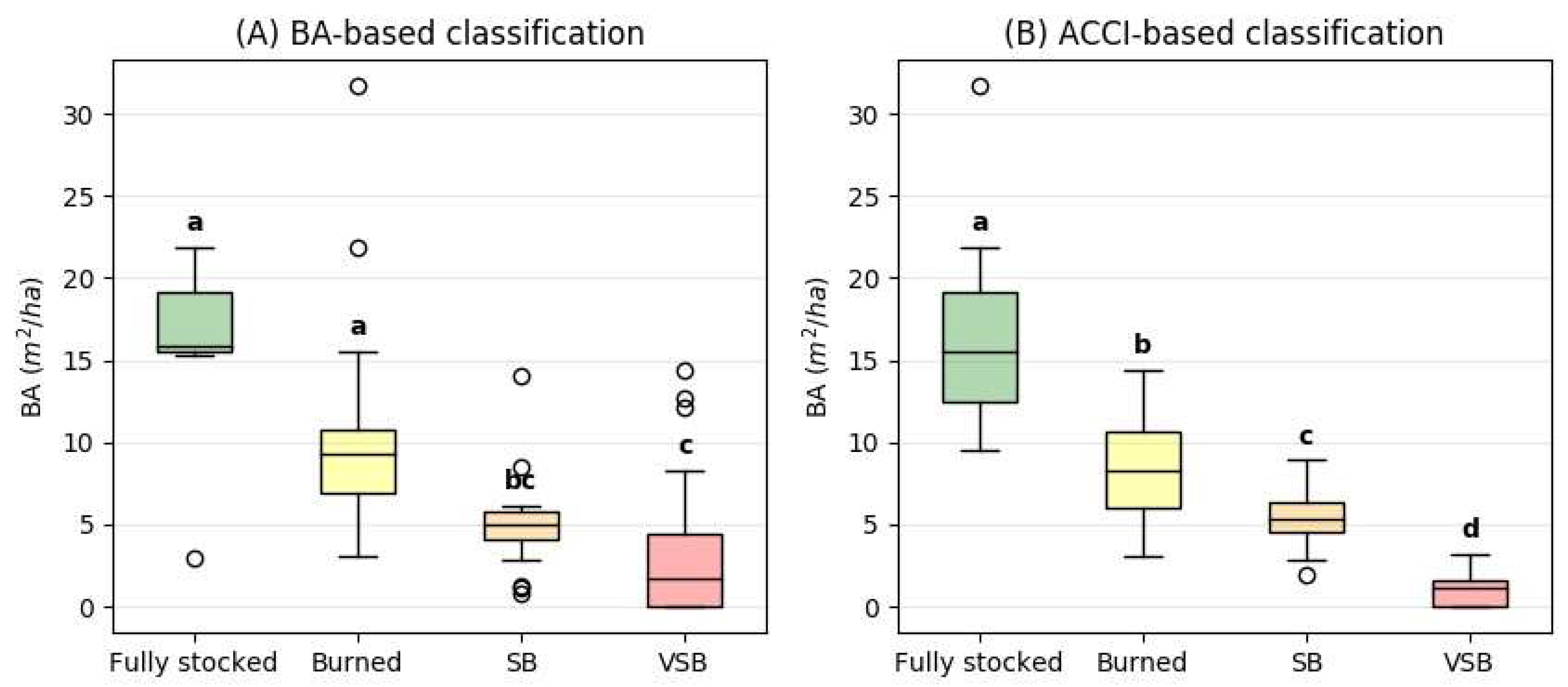
3.4. Image Classification
3.5. Validation of CHMs
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ACCI | adjusted canopy cover index |
| ALS | airborne laser scanning |
| BA | basal area |
| CBI | composite burned index |
| CC | canopy cover |
| CHM | canopy height model |
| CHM5 | canopy height model calculated from DTM5 |
| CHM10 | canopy height model calculated from DTM10 |
| COFEMA | Consejo Federal del Medio Ambiente |
| DBH | diameter at breast height |
| DSM | digital surface model |
| DTM | digital terrain model |
| DTM5 | digital terrain model with 5 m/pixel of resolution |
| DTM10 | digital terrain model with 10 m/pixel of resolution |
| FAO | Food and Agriculture Organisation of the United Nations |
| GPS | global positioning system |
| MAE | mean absolute error |
| NIR | near infra-red |
| RMSE | root-mean-squared error THC |
| SfM | structure form motion |
| TIN | triangular irregular networks |
| THC | tree height class |
| THC1 | CC from tree heights between 5 and 10 m |
| THC2 | CC from tree heights between 10 and 20 m |
| THC3 | CC from trees higher than 20 m |
| UAV | unmanned aerial vehicles |
| UNSA | Universidad Nacional de Salta |
References
- Griscom, B.; Gannz, D.; Virgilio, N.; Price, F.; Hayward, J.; Cortez, R.; Dodge, G.; Hurf, J.; Lowenstein, F.L.; Stanley, B. The Hidden Frontier of Forest Degradation: A Review of the Science, Policy and Practice of Reducing Degradation Emissions; The Nature Conservancy: Arlington, VA, USA, 2009; 76p. [Google Scholar]
- Simula, M.; Mansur, E. Un desafío mundial que reclama una respuesta local. Unasylva, Revista Internacional de Silvicultura e Industrias Forestales 2012, 238, 3–7. [Google Scholar]
- Stanturf, J.; Mansouruan, S.; Kleine, M. Introduction and overview. In Implementing Forest Landscape Restoration. A Practitioner‘s Guide; Stanturf, J., Mansouruan, S., Kleine, M., Eds.; IUFRO: Vienna, Austria, 2017; 128p, ISBN 978-3-902762-78-8. [Google Scholar]
- ITTO (Internaitonal Tropical Timber Organization). Guidelines for the Restoration, Management and Rehabilitation of Degraded and Secondary Tropical Forest; Internaitonal Tropical Timber Organization: Yokohama, Japan, 2002; ISBN 490204501X. [Google Scholar]
- Penman, J. Good Practice Guidance for Land Use, Land-Use Change and Forestry. The Intergovernmental Panel on Climate Change; Penman, J., Ed.; IPPC National Greenhouse Gas Inventories Programme: Hayama, Kanagawa, 2003; ISBN 4-88788-003-0. [Google Scholar]
- FAO (Food and Agriculture Organization). Assessing Forest Degradation. Towards the Development of Globally Applicable Guidelines; FAO: Rome, Italy, 2011. [Google Scholar]
- FAO (Food and Agriculture Organization). Towards Defining Forest Degradation: Comparative Analysis of Existing Definitions; Simula, M., Ed.; FAO: Rome, Italy, 2009. [Google Scholar]
- Montagnini, F.; Eibl, B.; Fenández, R.; Brewer, M. Estrategias Para la Restauración de Paisajes Forestales. Experiencias en Misiones, Argentina. In Proceedings of the Actas II Congreso Forestal Latinoamericano IUFRO, Talca, Chile, 23–27 October 2006. [Google Scholar]
- Di Marco, E. Práctica silvícola. Enriqueciemiento del bosque native. Producción Forestal 2014, 11, 35–37. [Google Scholar]
- Brown, A.D.; Blendinger, P.G.; Lomáscolo, T.; García Bes, P. Selva Pedemontana de las Yunagas: Historia Natural, Ecología y Manejo de un Ecosistema en Peligro; Ediciones del Subtrópico: Yerba Buena, Argentina, 2009; ISBN 978-987-23533-5-3. [Google Scholar]
- Blundo, C.; Malizia, L.R. Impacto del Aprovechamiento Forestal en la Estructura y Diversidad de la Sleva Pedemontana; Pro Yungas: Tucumán, Argentina, 2009. [Google Scholar]
- Blundo, C.; Malizia, L.R.; Blake, J.G.; Brown, A.D. Tree species distribution in Andean forests. Influence of regional and local factors. J. Trop. Ecol. 2012, 28, 83–95. [Google Scholar] [CrossRef]
- Malizia, L.; Pacheco, S.; Blundo, C.; Brown, A.D. Caracterización altitudinal, uso y conservación de las Yungas Subtropicales de Argentina. Ecosistemas 2012, 21, 53–73. [Google Scholar]
- Frolking, S.; Palace, M.W.; Clark, D.B.; Chambers, J.Q.; Shugart, H.H.; Hurtt, G.C. Forest disturbance and recovery: A general review in the context of spaceborne remote sensing of impacts on aboveground biomass and canopy structure. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Dunn, C.; Bailey, J. Tree mortality and structural change following mixed-severity fire in Pseudotsuga forests of Oregon’s western Cascades, USA. For. Ecol. Manag. 2016, 365, 107–118. [Google Scholar] [CrossRef]
- Belote, T.R.; Larson, A.J.; Dietz, M.S. Tree survival scales to community-level effects following mixed-severity fire in a mixed-conifer forest. For. Ecol. Manag. 2015, 353, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Collins, B.M.; Stephens, S.L. Stand-replacing patches within a ‘mixed severity’ fire regime: Quantitative characterization using recent fires in a long-established natural fire area. Landsc. Ecol. 2010, 25, 927–939. [Google Scholar] [CrossRef]
- COFEMA (Consejo Federal del Medio Ambiente). Resolution N 230; COFEMA: Buenos Aires, Argentina, 2012. [Google Scholar]
- Argentinian Parlament. Public Law 26331. Presupuestos Mínimos de Protección Ambiental de los Bosques Nativos; Boletín Oficial de la República Argentina: Buenos Aires, Argentina, 2007. [Google Scholar]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C. Remote sensing of selective logging in Amazonia. Remote Sens. Environ. 2002, 80, 483–496. [Google Scholar] [CrossRef]
- Souza, C.M.; Roberts, D.A.; Cochrane, M.A. Combining spectral and spatial information to map canopy damage from selective logging and forest fires. Remote Sens. Environ. 2005, 98, 329–343. [Google Scholar] [CrossRef]
- Matricardi, E.A.T.; Skole, D.L.; Pedlowski, M.A.; Chomentowski, W.; Fernandes, L.C. Assessment of tropical forest degradation by selective logging and fire using Landsat imagery. Remote Sens. Environ. 2010, 114, 1117–1129. [Google Scholar] [CrossRef]
- Dennis, R.A.; Colfer, C.P. Impacts of land use and fire on the loss and degradation of lowland forest in 1983–2000 in East Kutai District, East Kalimantan, Indonesia. Singap. J. Trop. Geogr. 2006, 27, 30–48. [Google Scholar] [CrossRef]
- Chuvieco, E.; Kasischke, E.S. Remote sensing information for fire management and fire effects assessment. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Kasischke, E.S.; Turetsky, M.R. Recent changes in the fire regime across the North American boreal region. Spatial and temporal patterns of burning across. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Fisher, R.P.; Hobgen, S.E.; Haleberek, K.; Sula, N.; Mandaya, I. Free satellite imagery and digital elevation model analyses enabling natural resource management in the developing world. Case studies from Eastern Indonesia. Singap. J. Trop. Geogr. 2017, 63, 107–129. [Google Scholar] [CrossRef]
- Herold, M.; Achard, F.; De Fries, R.; Skole, D.; Brown, S.; Townshend, J. Report of the First Workshop on Monitoring Tropical Deforestation for Compensated Reductions. In Proceedings of the GOFC-GOLD Symposium on Forest and Land Cover Observations, Jena, Germany, 21–22 March 2006. [Google Scholar]
- Souza, C.M.; Roberts, D. Mapping forest degradation in the Amazon region with Ikonos images. Int. J. Remote Sens. 2005, 26, 425–429. [Google Scholar] [CrossRef]
- Anderson, K.; Gaston, K.J. Lightweight unmanned aerial vehicles will revolutionize spatial ecology. Front. Ecol. Environ. 2013, 11, 138–146. [Google Scholar] [CrossRef] [Green Version]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A Photogrammetric Workflow for the creation of a Forest Height Model from Small Unmanned Aerial System Imagery. Forests 2013, 4, 192–944. [Google Scholar] [CrossRef]
- Penner, M.; Woods, M.; Pitt, D. A comparison of airborne laser scanning and image point cloud derived tree size class distribution models in Boreal Ontario. Forests 2015, 6, 4034–4054. [Google Scholar] [CrossRef]
- Nurminen, K.; Karjalainen, M.; Yu, X.; Hyyppä, J.; Honkavaara, E. Performance of dense digital surface models based on image matching in the estimation of plot-level forest variables. ISPRS J. Photogramm. Remote Sens. 2013, 83, 104–115. [Google Scholar] [CrossRef]
- White, J.; Wulder, M.; Vastaranta, M.; Coops, N.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.; Gobakken, T.; Næsset, E. Inventory of Small Forest Areas Using an Unmanned Aerial System. Remote Sens. 2015, 8, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Honkavaara, E.; Litkey, P.; Nurminen, K. Automatic storm damage detection in forests using high-altitude photogrammetric imagery. Remote Sens. 2013, 5, 1405–1424. [Google Scholar] [CrossRef]
- Tuominen, S.; Balazs, A.; Saari, H.; Pölönen, I.; Sarkeala, J.; Viitala, R. Unmanned aerial system imagery and photogrammetric canopy height data in area-based estimation of forest variables. Silva Fennica 2015, 49. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopeˇnka, P. Assessment of forest structure using two UAV techniques. A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.; Genesio, L.; Vaccari, F.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote Sensing of Vegetation Structure Using Computer Vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital Surface Models and Orthophotos Obtained with an Unmanned Aerial System for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 9632–9654. [Google Scholar] [CrossRef]
- Gerrand, A.; Lindquist, E.; D’Annunzio, R. Un estudio per teledetección permite actualizar los cálculos de pérdidas de superficies forestales. Unasylva Revista Internacional de Silvicultura e Industrias Forestales 2012, 238, 14–15. [Google Scholar]
- Puliti, S.; Ene, L.T.; Gobakken, T.; Næsset, E. Use of partial-coverage UAV data in sampling for large scale forest inventories. Remote Sens. Environ. 2017, 194, 115–126. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Bohlin, J.; Wallerman, J.; Fransson, J.E.S. Forest variable estimation using photogrammetric matching of digital aerial images in combination with a high-resolution DEM. Scand. J. For. Res. 2012, 62, 692–699. [Google Scholar] [CrossRef]
- Nelson, R.; Boudreau, J.; Gregoire, T.G.; Margolis, H.; Næsset, E.; Gobakken, T.; Ståhl, G. Estimating Quebec provincial forest resources using ICESat/GLAS. Can. J. For. Res. 2009, 39, 862–881. [Google Scholar] [CrossRef]
- Ene, L.T.; Næsset, E.; Gobakken, T. Simulation-based assessment of sampling strategies for large-area biomass estimation using wall-to-wall and partial coverage airborne laser scanning surveys. Remote Sens. Environ. 2016, 176, 328–340. [Google Scholar] [CrossRef]
- Fraser, R.H.; van der Sluijs, J.; Hal, R.J. Calibrating Satellite-Based Indices of Burn Severity from UAV-Derived Metrics of a Burned Boreal Forest in NWT, Canada. Remote Sens. 2017, 9, 279. [Google Scholar] [CrossRef]
- Puliti, S.; Saarela, S.; Gobakken, T.; Ståhl, G.; Næsset, E. Combining UAV and Sentinel-2 auxiliary data for forest growing stock volume estimation through hierarchical model-based inference. Remote Sens. Environ. 2018, 204, 485–497. [Google Scholar] [CrossRef]
- Cabrera, A.L. Regiones fitogeográficas argentinas, 2nd ed.; Kugler, W.F., Ed.; Enciclopedia Argentina de Agricultura y Jardinería Acme: Buenos Aires, Argentina, 1976. [Google Scholar]
- Brown, A.D.; Grau, H.R.; Malicia, L.R.; Grau, A. Bosques Nublados del Neotrópico; Maarten, K., Brown, A.D., Eds.; Editorial INBio: Heredia, Costs Rica, 2001. [Google Scholar]
- Eliano, M.P.; Badinier, C.; Malizia, L.R. Manejo Forestal Sustentable en Yungas. Protocolo para el Desarrollo de un Plan de Manejo Forestal e Implementación en una Finca Piloto; ProYungas: Yerba Buena, Argentina, 2009. [Google Scholar]
- Balducci, E.; Eliano, P.; Sosa, I.; Iza, H. Bases Para el Manejo Sostenible de los Bosques Nativos de Jujuy; Incotedes: Jujuy, Argentina, 2012; ISBN 978-987-28804-0-8. [Google Scholar]
- Masek, J.G.; Huang, C.; Wolfe, R.; Cohen, W.; Hall, F.; Kutler, J.; Nelson, P. North American forest disturbance mapped from a decadal Landsat record. Remote Sens. Environ. 2008, 112, 2914–2926. [Google Scholar] [CrossRef]
- Jonsson, B.; Holm, S.; Kallur, H. A forest inventory method based on density-adapted circular plot size. Scand. J. For. Res. 1992, 7, 405–421. [Google Scholar] [CrossRef]
- Lessard, V.C.; Drummer, T.D.; Reed, D.D. Precision of density estimates from fixed-radius plots compared to n-tree distance sampling. For. Sci. 2002, 48, 1–6. [Google Scholar]
- Scott, C.T.; Gove, J.H. Encyclopedia of Environmetrics; El-Shaarawi, A.H., Walter, W., Eds.; Wiley: Chichester, UK; New York, NY, USA, 2002; ISBN 0471899976. [Google Scholar]
- Burns, J.H.R.; Delparte, D. Comparison of commercial structure-from-motion photogrammetry software used for underwater three-dimensional modeling of coral reef environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 127–131. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Redlands, C.A. (Ed.) ArcGIS Desktop: Release 10; Environmental Systems Research Institute: Redlands, CA, USA, 2011. [Google Scholar]
- R Development Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2008; ISBN 3-900051-07-0. Available online: http://www.R-project.org (accessed on 24 September 2017).
- Sokal, R.R.; Rohlf, F.J.; Biometry, L. The Principles and Practice of Statistics in Biological Research, 3rd ed.; W.H. Freeman and Company: New York, NY, USA, 1995; 850p, ISBN 0-7167-2411-1. [Google Scholar]
- Fox, J. Applied Regression Analysis and Generalized Linear Models, 2nd ed.; Sage: Los Angeles, CA, USA, 2008; ISBN 978-0-7619-3042-6. [Google Scholar]
- Baatz, M.; Schäpe, A. Multiresolution Segmentation: An optimization approach for high quality multi-scale image segmentation. In Angewandte Geographische Informationsverarbeitung XII; Strobl, T., Griesebner, G., Eds.; Wichmann Verlag: Karlsruhe, Germany, 2000; pp. 12–23. [Google Scholar]
- Frohn, R.C.; Chaudhary, N. Multi-scale Image Segmentation and Object-Oriented Processing for Land Cover Classification. GISci. Remote Sens. 2008, 45, 377–391. [Google Scholar] [CrossRef]
- Thompson, I.; Guariguata, M.; Okabe, K.; Bahamondez, C.; Nasi, R.; Heymell, V.; Sabogal, C. An Operational Framework for Defining and Monitoring Forest Degradation. Ecol. Soc. 2013, 18, 20. [Google Scholar] [CrossRef]
- Morales-Barquero, L.; Skutsch, M.; Jardel-Peláez, E.; Ghilardi, A.; Kleinn, C.; Healey, J. Operationalizing the definition of forest degradation for REDD+, with application to Mexico. Forests 2014, 5, 1653–1681. [Google Scholar] [CrossRef]
- Bortz, J. Statistik für Sozialwissenchaftler. Bortz, J-4; Springer: Berlin/Heilderberg, Germany; New York, NY, USA; Wiley: Chichester, UK; New York, NY, USA, 1993; ISBN 3-540-56200-1. [Google Scholar]
- Watson, P.F.; Petrie, A. Method agreement analysis: A review of correct methodology. Theriogenology 2010, 73, 1167–1179. [Google Scholar] [CrossRef] [PubMed]
- Gaillard de Benítez, C.; Pece, M.G. Muestreo y Técnicas de Evaluación de Vegetación y Fauna; FCF-UNSE: Santiago del Estero, Argentina, 2011; 80p, ISBN 978-987-1676-44-6. [Google Scholar]
- Arturi, M.; Chacoff, N.; Grau, R.; Morales, J.M.; Prado, D.; Yapura, P. Ecología y Producción de Cedro (Género Cedrela) en las Yungas Australes; Ediciones del Subtrópico: Yerba Buena, Tucumán, 2006; ISBN 978-987-23533-5-3. [Google Scholar]
- Sai, S.V.; Mikhailov, E.V. Texture-based forest segmentation in satellite images. J. Phys. Conf. Ser. 2017, 803, 012133. [Google Scholar] [CrossRef] [Green Version]
- St-Onge, B.; Jumelet, J.; Cobello, M.; Véga, C. Measuring individual tree height using a combination of stereophotogrammetry and lidar Can. J. For. Res. 2004, 34, 2122–2130. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-de-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot Syst. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Getzin, S.; Wiegand, K.; Schöning, I. Assessing biodiversity in forests using very high-resolution images and unmanned aerial vehicles. Methods Ecol. Evol. 2012, 3, 397–404. [Google Scholar] [CrossRef]
- Beckenbach, E.; Müller, T.; Seyfried, H.; Simon, T. Potential of a high-resolution DTM with large spatial coverage for visualization, identification and interpretation of young (Würmian) glacial geomorphology. Quat. Sci. J. 2014, 47. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strata | Range of BA (m2/ha) | Range of ACCI Value |
|---|---|---|
| Very severely burned | ≤3.6 | ≤20 |
| Severely burned | >3.6 and ≤6 | >20 and ≤33 |
| Burned | >6 and ≤12 | >33 and ≤66 |
| Fully stocked | >12 | >66 |
| Variable | Coefficient | Standard Deviation | t-Value |
|---|---|---|---|
| Intercept | −0.93010 | 0.86051 | 0.284 |
| THC1 | 0.14742 | 0.02998 | 6.26 × 10-6 *** |
| THC1 | 0.22734 | 0.01810 | <2 × 10-16 *** |
| THC1 | 0.32320 | 0.06330 | 3.09 × 10-6 *** |
| Actual Stratum | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Fully Stocked | Burned | SB | VSB | Total | |||||||
| Predicted stratum | ACCI | BA | ACCI | BA | ACCI | BA | ACCI | BA | ACCI | BA | |
| Fully stocked | 12 | 6 | 3 | 0 | 0 | 0 | 0 | 1 | 15 | 7 | |
| Burned | 5 | 7 | 18 | 24 | 6 | 2 | 2 | 1 | 31 | 34 | |
| SB | 0 | 1 | 6 | 2 | 6 | 9 | 3 | 4 | 15 | 16 | |
| VSB | 0 | 3 | 0 | 1 | 0 | 1 | 15 | 4 | 15 | 9 | |
| Total | 17 | 17 | 27 | 27 | 12 | 12 | 20 | 20 | 76 | 76 | |
| Strata | Variable | BA-Based Classification | ACCI-Based Classification |
|---|---|---|---|
| VSB + SB | Area (ha) | 2191.0 | 1850.1 |
| Number of plots | 35 | 30 | |
| Average BA (m2/ha) | 4.3 | 3.2 | |
| Max BA (m2/ha) | 14.4 | 8.9 | |
| Min BA (m2/ha) | 0.0 | 0.0 | |
| Estimation error (m2/ha) | 1.4 | 1.0 | |
| Relative estimation error (%) | 32.14 | 31.22 | |
| Necessary plots to target error | 90 | 73 | |
| Burned | Area (ha) | 1369.4 | 1431.0 |
| Number of plots | 34 | 31 | |
| Average BA (m2/ha) | 10.0 | 8.4 | |
| Max BA (m2/ha) | 31.7 | 14.4 | |
| Min BA (m2/ha) | 3.1 | 3.1 | |
| Estimation error (m2/ha) | 1.8 | 1.1 | |
| Relative estimation error (%) | 18.08 | 13.24 | |
| Necessary plots to target error | 28 | 14 | |
| Fully stocked | Area (ha) | 286.9 | 523.7 |
| Number of plots | 7 | 15 | |
| Average BA (m2/ha) | 15.7 | 16.4 | |
| Max BA (m2/ha) | 21.9 | 31.7 | |
| Min BA (m2/ha) | 3.0 | 9.5 | |
| Estimation error (m2/ha) | 5.6 | 3.2 | |
| Relative estimation error (%) | 35.81 | 19.4 | |
| Necessary plots to target error | 23 | 15 | |
| Bare land | Area (ha) | 96.4 | 139.4 |
| Strata | Variable | BA-Based Classification | ACCI-Based Classification |
|---|---|---|---|
| VSB | Area (ha) | 1237.6 | 858.0 |
| Number of plots | 19 | 15 | |
| Average BA (m2/ha) | 3.7 | 1.04 | |
| Max BA (m2/ha) | 14.4 | 3.2 | |
| Min BA (m2/ha) | 0.0 | 0.0 | |
| Estimation error (m2/ha) | 2.25 | 0.59 | |
| Relative estimation error (%) | 60.5 | 57.03 | |
| Necessary plots to target error | 174 | 121 | |
| SB | Area (ha) | 953.4 | 992.1 |
| Number of plots | 16 | 15 | |
| Average BA (m2/ha) | 5.0 | 5.4 | |
| Max BA (m2/ha) | 14.0 | 8.9 | |
| Min BA (m2/ha) | 0.8 | 1.9 | |
| Estimation error (m2/ha) | 1.7 | 1.07 | |
| Relative estimation error (%) | 33.27 | 19.85 | |
| Necessary plots to target error | 44 | 15 |
| Strata | Variable | CHM5 | CHM10 |
|---|---|---|---|
| Fully stocked (32) | Mean absolute error (m) | 6.78 | 4.54 |
| RMSE (m) | 8.25 | 5.49 | |
| r2 to observation measurements | 0.06 | 0.12 | |
| Burned (26) | Mean absolute error (m) | 4.02 | 3.39 |
| RMSE (m) | 4.87 | 4.21 | |
| r2 to observation measurements | 0.44 | 0.44 | |
| SB + VSB (13) | Mean absolute error (m) | 2.39 | 2.29 |
| RMSE (m) | 2.96 | 2.85 | |
| r2 to observation measurements | 0.79 | 0.80 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rossi, F.C.; Fritz, A.; Becker, G. Combining Satellite and UAV Imagery to Delineate Forest Cover and Basal Area after Mixed-Severity Fires. Sustainability 2018, 10, 2227. https://doi.org/10.3390/su10072227
Rossi FC, Fritz A, Becker G. Combining Satellite and UAV Imagery to Delineate Forest Cover and Basal Area after Mixed-Severity Fires. Sustainability. 2018; 10(7):2227. https://doi.org/10.3390/su10072227
Chicago/Turabian StyleRossi, Fernando C., Andreas Fritz, and Gero Becker. 2018. "Combining Satellite and UAV Imagery to Delineate Forest Cover and Basal Area after Mixed-Severity Fires" Sustainability 10, no. 7: 2227. https://doi.org/10.3390/su10072227
APA StyleRossi, F. C., Fritz, A., & Becker, G. (2018). Combining Satellite and UAV Imagery to Delineate Forest Cover and Basal Area after Mixed-Severity Fires. Sustainability, 10(7), 2227. https://doi.org/10.3390/su10072227