Assessing the Socioeconomic Impacts of Intelligent Connected Vehicles in China: A Cost–Benefit Analysis


Abstract
:1. Introduction
- How can the socioeconomic impacts of ICVs be measured at the country level?
- Can the benefits of ICVs cover their deployment costs and how long will it take?
- What are the key factors that will influence the ICVs’ benefits and deployment?
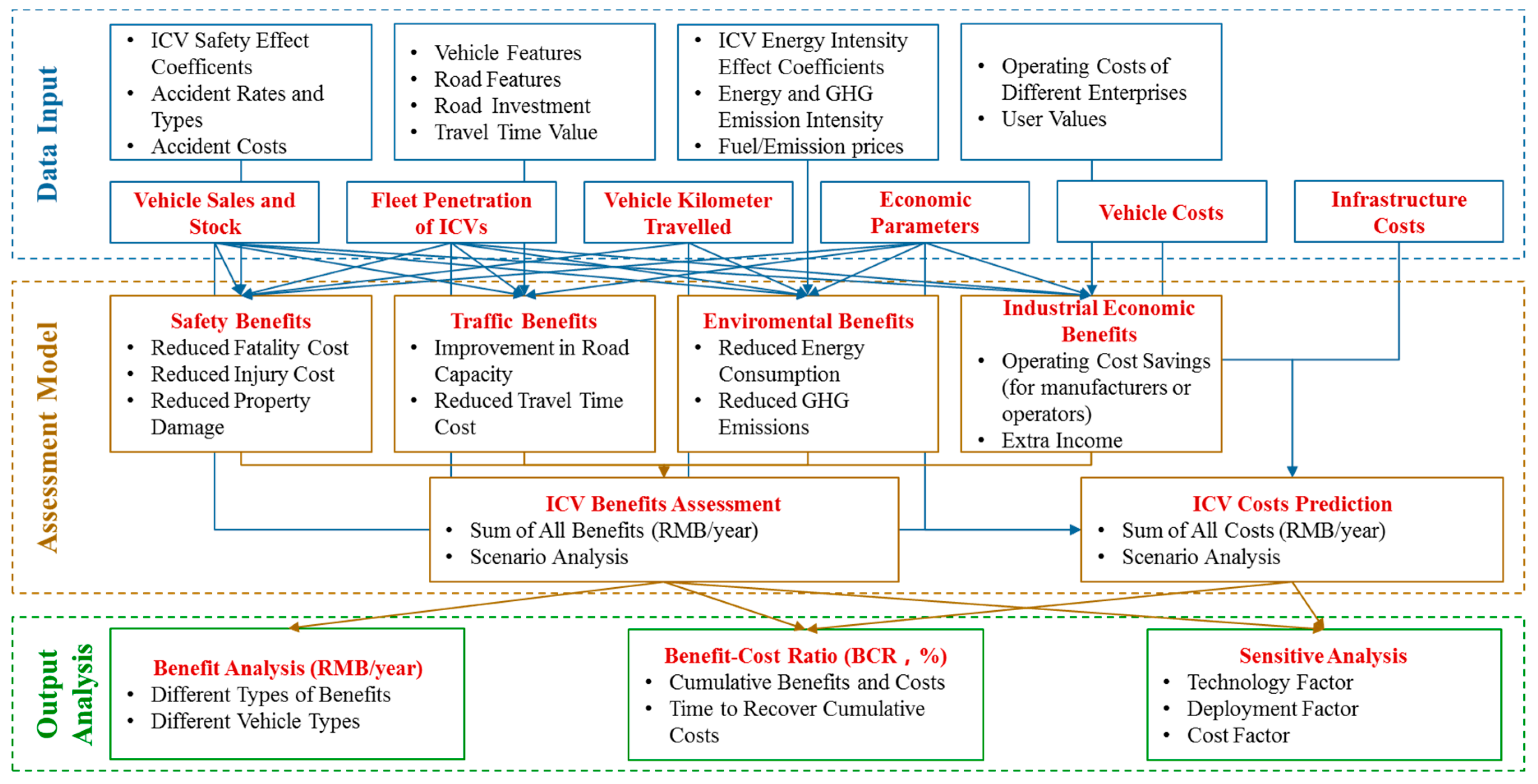
2. Materials and Methods
2.1. Definition and Basic Assumptions
2.1.1. Basic Definitions and Scenarios
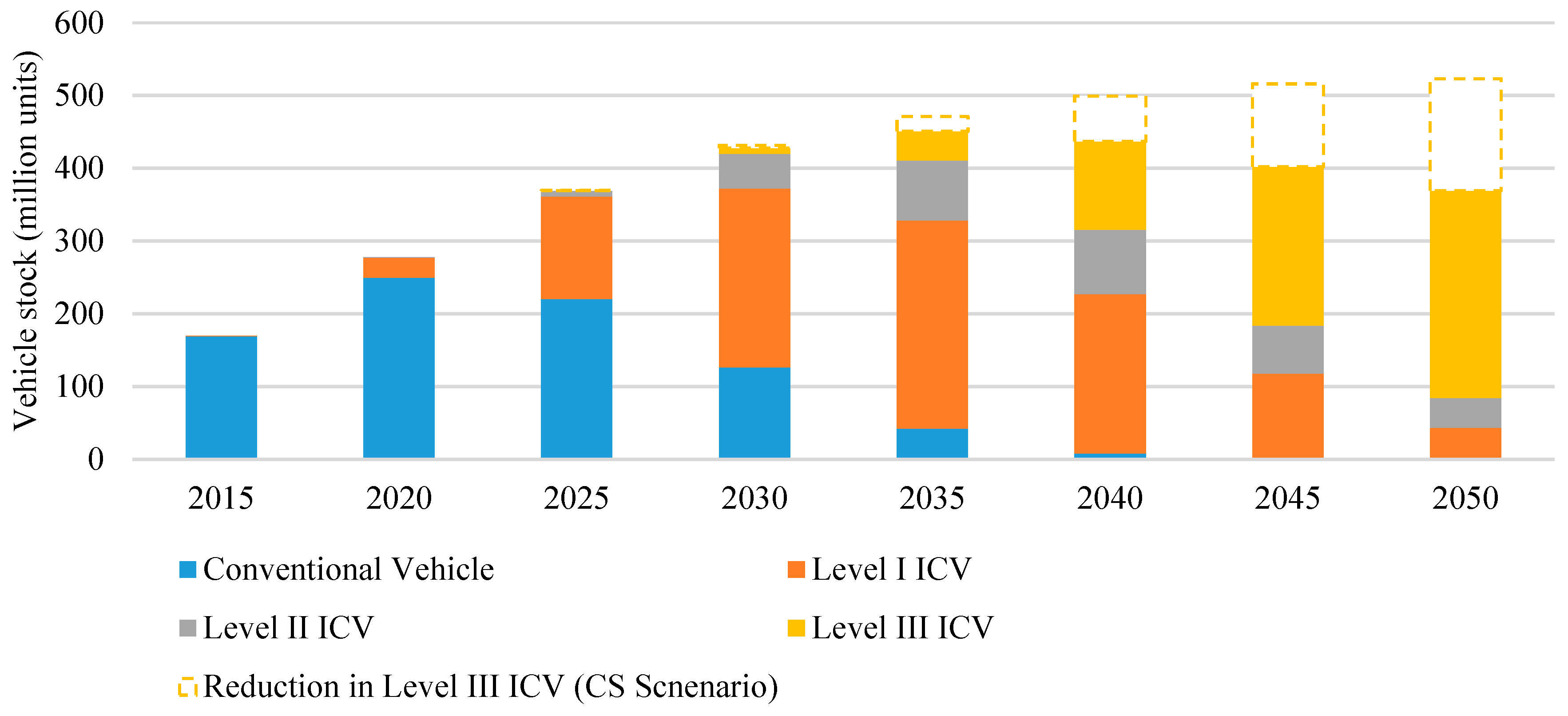
2.1.2. Vehicle Stock and Fleet Penetration
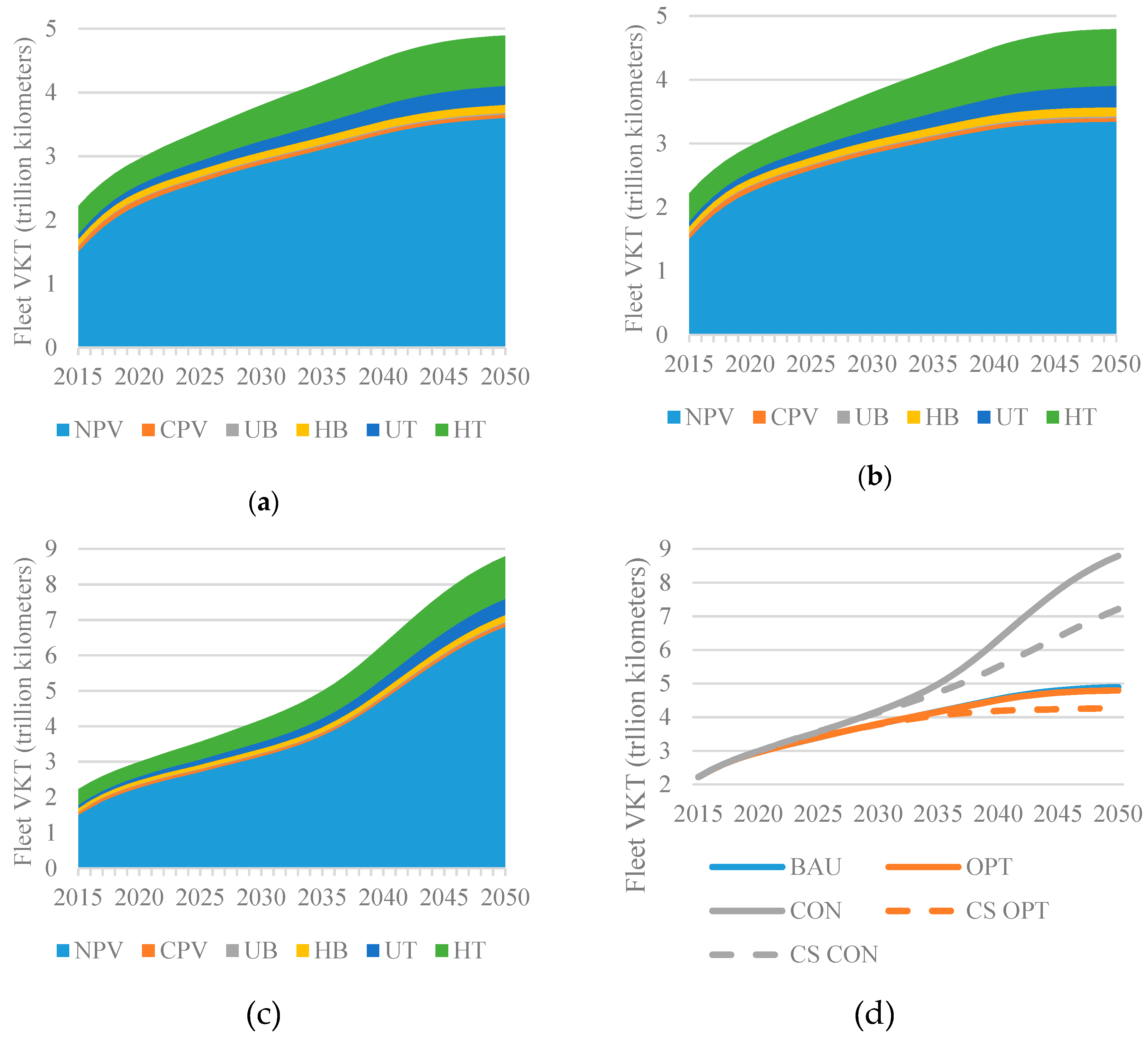
2.1.3. Vehicle Kilometers Travelled
2.1.4. Economic Assumptions
2.2. Safety Benefits
2.2.1. Impacts on Number of Accidents
2.2.2. Accident Costs
2.3. Traffic Benefits
2.3.1. Impacts on Road Capacity
2.3.2. Impacts on Travel Time
2.3.3. Road Capacity Cost and Travel Time Value
2.4. Environmental Benefits
2.4.1. Impacts on Energy Consumption
2.4.2. Impacts on GHG emissions
2.4.3. Energy and GHG Emissions Costs
2.5. Industrial Economic Benefits
2.5.1. Impacts on Operating Costs
2.5.2. Impacts on Income
2.6. Implementation Costs
2.6.1. Vehicle Costs
2.6.2. Infrastructure Costs
3. Results
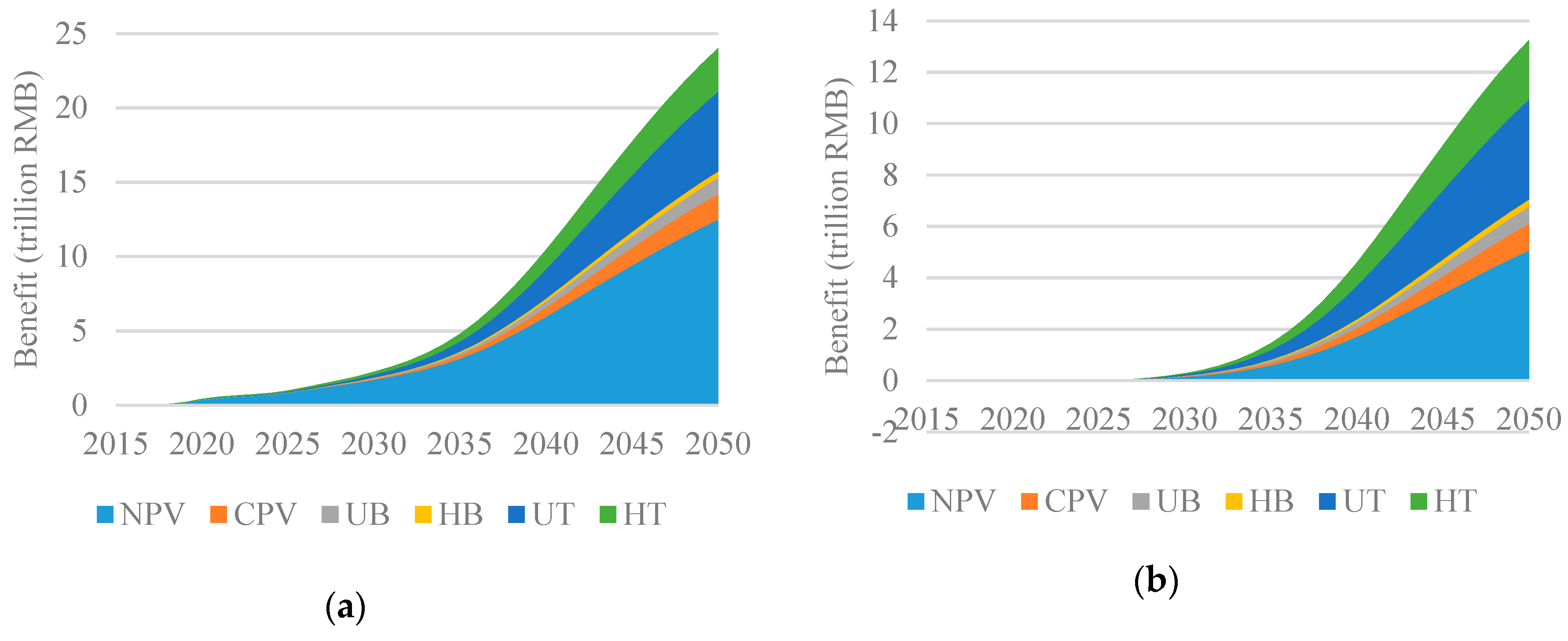
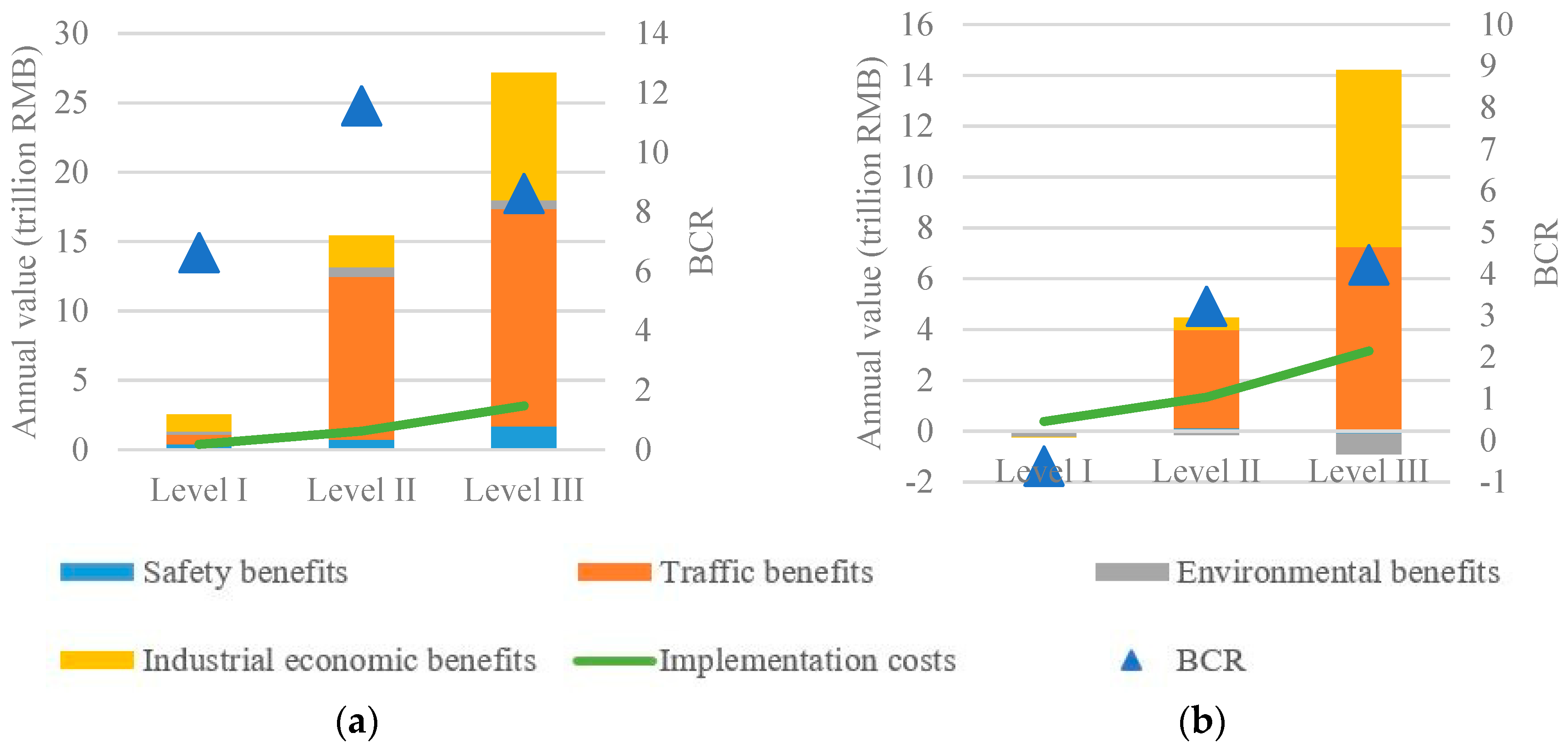
3.1. Different Types of Benefits
3.2. Benefits for Different Types of Vehicles
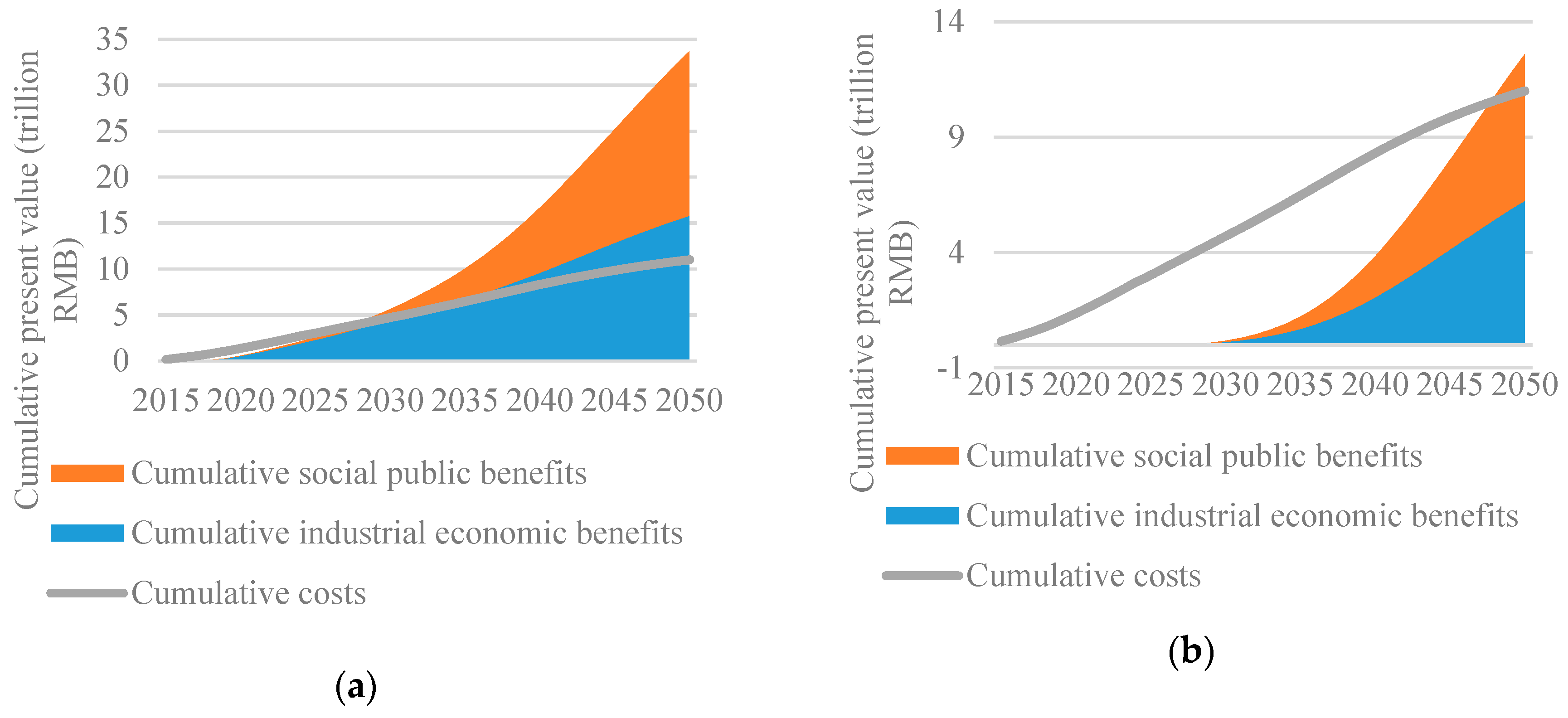
3.3. Cumulative Cost–Benefit Analysis
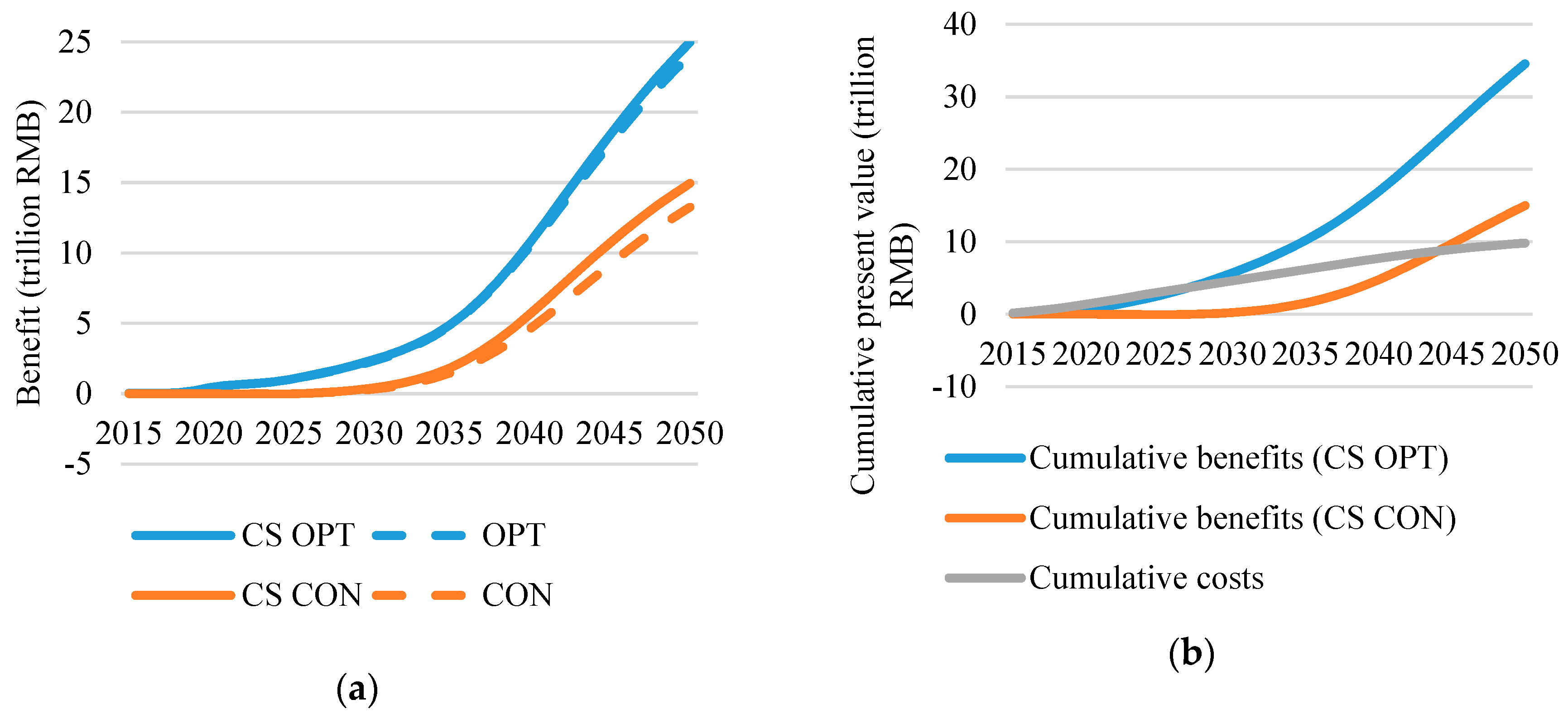
3.4. Impacts of Car Sharing
4. Discussion: Sensitivity Analysis
4.1. Technology Factor
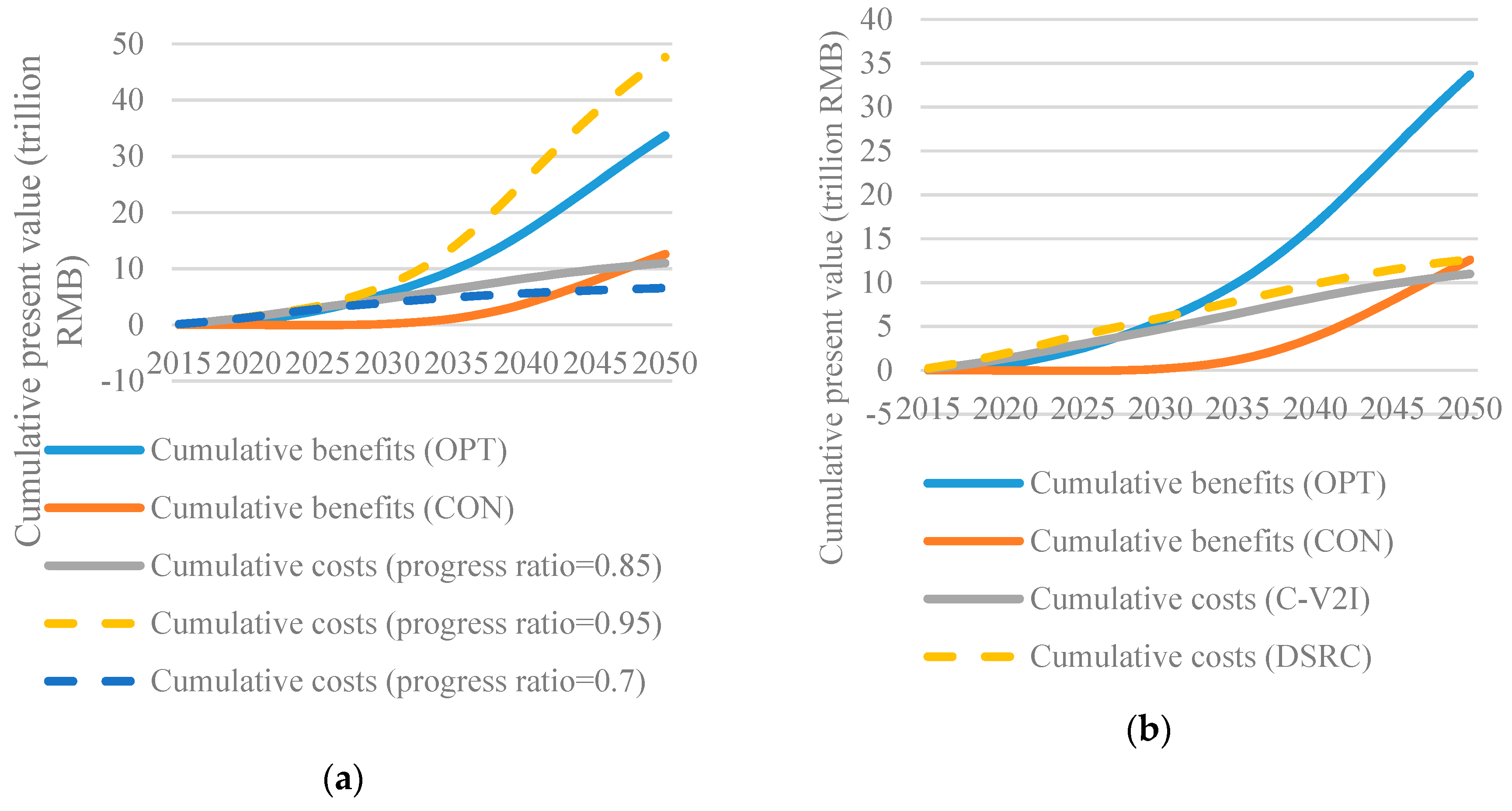
4.2. Deployment Factor
4.3. Cost Factor
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kuang, X.; Zhao, F.Q.; Hao, H.; Liu, Z.W. Intelligent connected vehicles: The industrial practices and impacts on automotive value-chains in China. Asia Pac. Bus. Rev. 2018, 24, 1–21. [Google Scholar] [CrossRef]
- Martinez-Diaz, M.; Soriguera, F.; Perez, I. Autonomous driving: A bird’s eye view. IET Intell. Transp. Syst. 2019, 13, 563–579. [Google Scholar] [CrossRef]
- Bertoncello, M.; Wee, D. Ten Ways Autonomous Driving Could Redefine the Automotive World. Available online: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/ten-ways-autonomous-driving-could-redefine-the-automotive-world (accessed on 27 March 2019).
- The Strategic Advisory Committee of Technology Roadmap for Energy Saving and New Energy Vehicles; SAE-China. Technology Roadmap for Energy Saving and New Energy Vehicles; China Machine Press: Beijing, China, 2016. [Google Scholar]
- Kuhnert, F.; Stürmer, C.; Koster, A. Five Trends Transforming the Automotive Industry; PricewaterhouseCoopers GmbH Wirtschaftsprüfungsgesellschaft: Berlin, Germany, 2018; Available online: https://www.pwc.com/gx/en/industries/automotive/assets/pwc-five-trends-transforming-the-automotive-industry.pdf (accessed on 5 June 2019).
- Wiethoff, M. Action for Advanced Driver Assistance and Vehicle Control Systems Implementation, Standardisation, Optimum use of the Road Network and Safety; SWOV Institute for Road Safety Research: Leidschendam, The Netherlands, 2003. [Google Scholar]
- Abele, J.; Kerlen, C.; Krueger, S.; Baum, H.; Geißler, T.; Grawenhoff, S.; Schneider, J.; Schulz, W.H. Exploratory Study on the Potential Socio-Economic Impact of the Introduction of Intelligent Safety Systems in Road Vehicles; VDI/VDE Innovation + Technik GmbH.; Institute for Transport Economics at the University of Cologne: Teltow, Germany, 2005. [Google Scholar]
- Malong, K.; Wilmink, I.; Noecker, G.; Roßrucker, K.; Galbas, R.; Alkim, T. Final Report and Integration of Results and Perspectives for Market Introduction of IVSS; Netherland’s Organization for Applied Scientific Research: Delft, The Netherlands, 2008. [Google Scholar]
- Lu, M.; Wevers, K.; van der Heijden, R.; Marchau, V. Infrastructure measures versus ADAS for traffic safety—Application of the grey relational analysis evaluation method. In Proceedings of the 12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005; pp. 716–736. [Google Scholar]
- Psaraki, V.; Pagoni, I.; Schafer, A. Techno-economic assessment of the potential of intelligent transport systems to reduce CO2 emissions. IET Intell. Transp. Syst. 2012, 6, 355–363. [Google Scholar] [CrossRef]
- Benmimoun, M.; Putz, A.; Zlocki, A.; Eckstein, L. euroFOT: Field operational test and impact assessment of advanced driver assistance systems: Final results. In Proceedings of the 34th FISITA World Automotive Congress, Beijing, China, 27–30 November 2012; pp. 537–547. [Google Scholar]
- Kuang, X.; Zhao, F.; Hao, H.; Liu, Z. Intelligent Vehicles’ Effects on Chinese Traffic: A Simulation Study of Cooperative Adaptive Cruise Control and Intelligent Speed Adaption. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems (ITSC) 2018, Maui, HI, USA, 4–7 November 2018; pp. 368–373. [Google Scholar]
- Kiefer, R.J.; Hankey, J.M. Lane change behavior with a side blind zone alert system. Accid. Anal. Prev. 2008, 40, 683–690. [Google Scholar] [CrossRef] [PubMed]
- Lie, A.; Tingvall, C.; Krafft, M.; Kullgren, A. The effectiveness of electronic stability control (ESC) in reducing real life crashes and injuries. Traffic Inj. Prev. 2006, 7, 38–43. [Google Scholar] [CrossRef] [PubMed]
- Edwards, M.; Nathanson, A.; Wisch, M. Estimate of Potential Benefit for Europe of Fitting Autonomous Emergency Braking (AEB) Systems for Pedestrian Protection to Passenger Cars. Traffic Inj. Prev. 2014, 15, S173–S182. [Google Scholar] [CrossRef] [PubMed]
- Erke, A. Effects of electronic stability control (ESC) on accidents: A review of empirical evidence. Accid. Anal. Prev. 2008, 40, 167–173. [Google Scholar] [CrossRef]
- Ponte, G.; Ryan, G.A.; Anderson, R.W.G. An estimate of the effectiveness of an in-vehicle automatic collision notification system in reducing road crash fatalities in South Australia. Traffic Inj. Prev. 2016, 17, 258–263. [Google Scholar] [CrossRef]
- Jermakian, J.S. Crash avoidance potential of four passenger vehicle technologies. Accid. Anal. Prev. 2011, 43, 732–740. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. A Policy 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Stephens, T.; Gonder, J.; Chen, Y.; Lin, Z.; Liu, C.; Gohlke, D. Estimated Bounds and Important Factors for Fuel Use and Consumer Costs of Connected and Automated Vehicles; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016.
- Wadud, Z.; MacKenzie, D.; Leiby, P. Help or hindrance? The travel, energy and carbon impacts of highly automated vehicles. Transp. Res. A Policy 2016, 86, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Brown, A.; Gonder, J.; Repac, B. An Analysis of Possible Energy Impacts of Automated Vehicle. In Lect N Mobil; Meyer, G., Beiker, S., Eds.; Springer Int Publishing Ag: Cham, Switzerland, 2014; pp. 137–153. [Google Scholar]
- Friedrich, B. The Effect of Autonomous Vehicles on Traffic. In Autonomous Driving: Technical, Legal and Social Aspects; Maurer, M., Gerdes, J.C., Lenz, B., Winner, H., Eds.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2016; pp. 317–334. [Google Scholar] [Green Version]
- Boran, C.; Bostrom, O.; Jacobson, B.J.H.; Lie, A.; Sander, U. Saving lives with V2X versus on-board sensing systems -which will be more effective? Technology leadership brief. In Proceedings of the SAE Convergence 2012, Detroit, MI, USA, 16–17 October 2012. [Google Scholar]
- Harding, J.; Powell, G.; Yoon, R.; Fikentscher, J.; Doyle, C.; Sade, D.; Lukuc, M.; Simons, J.; Wang, J. Vehicle-to-Vehicle Communications: Readiness of V2V Technology for Application; DOT HS 812 014; National Highway Traffic Safety Administration: Washington, DC, USA, 2014.
- Rodier, C.J. Travel Effects and Associated Greenhouse Gas Emissions of Automated Vehicles; University of California, Davis: Davis, CA, USA, 2018. [Google Scholar]
- MacKenzie, D.; Wadud, Z.; Leiby, P. A first order estimate of energy impacts of automated vehicles in the United States. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 12–16 January 2014; TRB Paper No. 14-2193. Available online: https://faculty.washington.edu/dwhm/wp-content/uploads/2016/01/MacKenzie-Wadud-Leiby-14-2193-as-submitted.pdf (accessed on 27 March 2019).
- Gucwa, M. Mobility and energy impacts of automated cars. In Proceedings of the Automated Vehicles Symposium, San Francisco, CA, USA, 14–18 July 2014. [Google Scholar]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. C Emerg. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- SAE On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018; Available online: https://saemobilus.sae.org/content/j3016_201806 (accessed on 27 March 2019).
- Lu, Z.; Zhou, Y.; Cai, H.; Wang, M.; He, X.; Przesmitzki, S. China Vehicle Fleet Model: Estimation of Vehicle Stocks, Usage, Emissions, and Energy Use-Model Description, Technical Documentation, and User Guide; Argonne National Lab. (ANL): Argonne, IL, USA, 2018.
- He, N.; Zhao, S.C. Study on Urban Road Impedance Function Model—A Case Study of Dalian City. J. Highw. Transp. Res. Dev. 2014, 31, 104–108. [Google Scholar] [CrossRef]
- United States. Bureau of Public Roads. Traffic Assignment Manual for Application with a Large, High Speed Computer; U.S. Dept. of Commerce, Bureau of Public Roads, Office of Planning, Urban Planning Division: Washington, DC, USA, 1964. Available online: https://books.google.com/books/about/ Traffic_assignment_manual_for_applicatio.html?id=gkNZAAAAMAAJ (accessed on 27 March 2019).
- Liu, F.Q.; Zhao, F.Q.; Liu, Z.W.; Hao, H. China’s Electric Vehicle Deployment: Energy and Greenhouse Gas Emission Impacts. Energies 2018, 11, 3353. [Google Scholar] [CrossRef]
- AUTOTEC. A Study on Intelligent Vehicle Technology Development Trend and Market Response; China Automotive Technology & Research Center: Beijing, China, 2016. [Google Scholar]
- Huo, H.; Zhang, Q.; He, K.B.; Yao, Z.L.; Wang, M.C. Vehicle-use intensity in China: Current status and future trend. Energy Policy 2012, 43, 6–16. [Google Scholar] [CrossRef]
- Shoup, D.C. Cruising for parking. Transp. Policy 2006, 13, 479–486. [Google Scholar] [CrossRef]
- Harper, C.D.; Hendrickson, C.T.; Mangones, S.; Samaras, C. Estimating potential increases in travel with autonomous vehicles for the non-driving, elderly and people with travel-restrictive medical conditions. Transp. Res. Part. C 2016, 72, 1–9. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 2018, 45, 143–158. [Google Scholar] [CrossRef]
- Beijing Transport Institute. Beijing Transportation Annual Report; Beijing Transport Institute: Beijing, China, 2018; Available online: http://www.bjtrc.org.cn/Show/download/id/18/at/0.html (accessed on 27 March 2019).
- Kulmala, R. Ex-ante assessment of the safety effects of intelligent transport systems. Accid. Anal. Prev. 2010, 42, 1359–1369. [Google Scholar] [CrossRef]
- The Ministry of Public Security. Annual Statistical Report on Road Traffic Accidents 2016; Traffic Management Research Institute of the Ministry of Public Security: Beijing, China, 2017. [Google Scholar]
- National Highway Traffic Safety Administration. Fatality Analysis Reporting System (FARS) Encyclopedia. Available online: https://www-fars.nhtsa.dot.gov/Main/index.aspx (accessed on 27 March 2019).
- Wilmink, I.; Janssen, W.; Jonkers, E.; Malone, K.; van Noort, M.; Klunder, G.; Rämä, P.; Sihvola, N.; Kulmala, R.; Schirokoff, A.; et al. Impact Assessment of Intelligent Vehicle Safety Systems; Netherland’s Organization for Applied Scientific Research: Delft, The Netherlands, 2008. [Google Scholar]
- Louwerse, W.J.R.; Hoogendoorn, S.P. ADAS safety impacts on rural and urban highways. In Proceedings of the 2004 IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 887–890. [Google Scholar]
- Kusano, K.D.; Gabler, H.; Gorman, T.I. Fleetwide Safety Benefits of Production Forward Collision and Lane Departure Warning Systems. SAE Int. J. Passeng. Cars-Mech. Syst. 2014, 7, 514–527. [Google Scholar] [CrossRef]
- Schwesinger, U.; Bürki, M.; Timpner, J.; Rottmann, S.; Wolf, L.; Paz, L.M.; Grimmett, H.; Posner, I.; Newman, P.; Häne, C.; et al. Automated valet parking and charging for e-mobility. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 157–164. Available online: https://ieeexplore.ieee.org/document/7535380 (accessed on 27 March 2019).
- Kaplan, S.; Guvensan, M.A.; Yavuz, A.G.; Karalurt, Y. Driver Behavior Analysis for Safe Driving: A Survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Mittal, A.; Kumar, K.; Dhamija, S.; Kaur, M. Head movement-based driver drowsiness detection: A review of state-of-art techniques. In Proceedings of the 2nd IEEE International Conference on Engineering and Technology, ICETECH 2016, Coimbatore, India, 17–18 March 2016; pp. 903–908. [Google Scholar]
- Mathias, M.; Timofte, R.; Benenson, R.; Gool, L.V. Traffic sign recognition—How far are we from the solution? In Proceedings of the 2013 International Joint Conference on Neural Networks (IJCNN), Dallas, TX, USA, 4–9 August 2013; pp. 1–8. Available online: https://ieeexplore.ieee.org/document/6707049 (accessed on 27 March 2019).
- Malone, K.; Hogema, J.; Innamaa, S.; Hausberger, S.; Dippold, M.; van Noort, M.; de Feijter, E.; Rämä, P.; Aittoniemi, E.; Benz, T.; et al. Impact Assessment and User Perception of Cooperative Systems: DRIVE C2X; DRIVE C2X Deliverables; D11.4; European Commission: Sindelfingen, Germany, 2014; Available online: https://www.eict.de/fileadmin/redakteure/Projekte/DriveC2X/Deliverables/DRIVE_C2X_D11.4_Impact_Assessment_v1.0_full_version-1.pdf (accessed on 27 March 2019).
- McMahon, K.; Dahdah, S. The True Cost of Road Crashes: Valuing Life and the Cost of a Serious Injury; International Road Assessment Programme (iRAP): Hampshire, UK, 2008. [Google Scholar]
- Wijnen, W.; Stipdonk, H. Social costs of road crashes: An international analysis. Accid. Anal. Prev. 2016, 94, 97–106. [Google Scholar] [CrossRef] [PubMed]
- Qin, X.Z.; Li, L.X.; Liu, Y.Y. The value of life and its regional difference in China. China Agric. Econ. Rev. 2013, 5, 373–390. [Google Scholar] [CrossRef]
- Office of the Secretary of Transportation. Revised Departmental Guidance 2016: Treatment of the Value of Preventing Fatalities and Injuries in Preparing Economic Analyses; U.S. Department of Transportation: Washington, DC, USA, 2016.
- Huber, M.J. Estimation of Passenger-Car Equivalents of Trucks in Traffic Stream; Transportation Research Board: Washington, DC, USA, 1982; Available online: http://onlinepubs.trb.org/onlinepubs/trr/1982/869/869-010.pdf (accessed on 27 March 2019).
- Calvert, S.C.; Schakel, W.J.; van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transp. 2017, 2017, 3082781. [Google Scholar] [CrossRef]
- Le Vine, S.; Zolfaghari, A.; Polak, J. Autonomous cars: The tension between occupant experience and intersection capacity. Transp. Res. C Emerg. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Litman, T. Transportation Cost and Benefit Analysis Techniques, Estimates and Implications; Victoria Transport Policy Institute: Victoria, BC, Canada, 2016; Available online: https://www.vtpi.org/tca/ (accessed on 27 March 2019).
- Gawron, J.H.; Keoleian, G.A.; De Kleine, R.D.; Wallington, T.J.; Kim, H.C. Life Cycle Assessment of Connected and Automated Vehicles: Sensing and Computing Subsystem and Vehicle Level Effects. Environ. Sci. Technol. 2018, 52, 3249–3256. [Google Scholar] [CrossRef]
- Hao, H.; Mu, Z.X.; Liu, Z.W.; Zhao, F.Q. Abating transport GHG emissions by hydrogen fuel cell vehicles: Chances for the developing world. Front. Energy 2018, 12, 466–480. [Google Scholar] [CrossRef]
- Verma, A.; Kumar, A. Life cycle assessment of hydrogen production from underground coal gasification. Appl. Energy 2015, 147, 556–568. [Google Scholar] [CrossRef]
- Turconi, R.; Boldrin, A.; Astrup, T. Life cycle assessment (LCA) of electricity generation technologies: Overview, comparability and limitations. Renew. Sustain. Energy Rev. 2013, 28, 555–565. [Google Scholar] [CrossRef] [Green Version]
- Luo, J.G.; He, B.L.; Xing, Y.T. Research on China’s Power Industry Development Roadmap. Energy China 2014, 36, 31–35. [Google Scholar] [CrossRef]
- Hao, X.; Wang, H.W.; Li, W.F.; Ouyang, M.G. Analysis of PHEV CO2 Emission Based on China’s Grid Structure and Travelling Pattern in Mega Cities. Environ. Sci. 2019, 14, 1705–1714. [Google Scholar] [CrossRef]
- Parry, I. Countries Are Signing up for Sizeable Carbon Prices. Available online: https://blogs.imf.org/2016/04/21/countries-are-signing-up-for-sizeable-carbon-prices/ (accessed on 5 June 2019).
- Bosch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Viereckl, R.; Hoppe, S.; Koster, A.; Pohlmann, A.; Ahlemann, D.; Bühnen, T.; Seyfferth, J. Digital Auto Report; PwC Strategy & (Germany) GmbH: Stuttgart, Germany, 2017. [Google Scholar]
- China Intelligent Manufacturing System Integrator Consortium. System Solution Market. Research Report on Smart Manufacturing Industries; China Electronics Standardization Institute: Beijing, China, 2017. [Google Scholar]
- Bange, C.; Grosser, T.; Janoschek, N. Big Data Use Cases—Getting Real on Data Monetization; Business Application Research Center: Würzburg, Germany, 2015. [Google Scholar]
- Liu, X.P. A study on Chinese automobile insurance market. Shanghai Auto 2017. [Google Scholar] [CrossRef]
- Research Group of Chinese Truck Drivers. China Social Research Report: Group Characteristics and Labor Process of the Truck Drivers; Social Sciences Academic Press (China): Beijing, China, 2018. [Google Scholar]
- Daziano, R.A.; Sarrias, M.; Leard, B. Are consumers willing to pay to let cars drive for them? Analyzing response to autonomous vehicles. Transp. Res. C Emerg. 2017, 78, 150–164. [Google Scholar] [CrossRef] [Green Version]
- Archambault, P.; Delaney, M.; Yuzawa, K.; Burgstaller, S.; Tamberrino, D.; Duval, A. Monetizing the Rise of Autonomous Vehicles; The Goldman Sachs Group, Inc.: New York, NY, USA, 2015. [Google Scholar]
- Tsuchiya, H.; Kobayashi, O. Mass production cost of PEM fuel cell by learning curve. Int. J. Hydrog. Energy 2004, 29, 985–990. [Google Scholar] [CrossRef]
- Wright, J.; Garrett, J.K.; Hill, C.J.; Krueger, G.D.; Evans, J.H.; Andrews, S.; Wilson, C.K.; Rajbhandari, R.; Burkhard, B. National Connected Vehicle Field Infrastructure Footprint Analysis; FHWA-JPO-14-125; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2014. [Google Scholar]
- Nguyen, T.V.; Shailesh, P.; Sudhir, B.; Kapil, G.; Jiang, L.; Wu, Z.; Malladi, D.; Li, J. A comparison of cellular vehicle-to-everything and dedicated short range communication. In Proceedings of the 2017 IEEE Vehicular Networking Conference, VNC 2017, Torino, Italy, 27–29 November 2017; pp. 101–108. [Google Scholar]
- Synced China. The Golden Age of HD Mapping for Autonomous Driving. Available online: https://medium.com/syncedreview/the-golden-age-of-hd-mapping-for-autonomous-driving-b2a2ec4c11d (accessed on 27 March 2019).
- Walz, E. lvl5 Looks to Crowdsourcing for Help Building HD Maps for Self-Driving Cars. Available online: https://www.futurecar.com/1236/lvl5-Looks-to-Crowdsourcing-for-Help-Building-HD-Maps-for-Self-Driving-Cars (accessed on 27 March 2019).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Types | ICV Levels | ||
|---|---|---|---|
| I | II | III | |
| Autonomous Functions [30] | Level 1 to 2 ADS | Level 3 ADS | Level 4 to 5 ADS |
| Connected Functions |
|
|
|
| Vehicle Type | Usage | Stock Assumption | Average Length (m) |
|---|---|---|---|
| Passenger Vehicle (PV) | Noncommercial Passenger Vehicle (NPV), e.g., Private, Business | Calculated on sales prediction | 4.5 [12] |
| Commercial Passenger Vehicle (CPV), e.g., Taxi, Fleet of Transportation Network Company | 2 per 1000 urban residents by 2050 | ||
| Bus | Urban Bus (UB) | 1 per 1000 urban residents by 2050 | 7 [23] |
| Highway Bus (HB) | Calculated on sales prediction | ||
| Truck | Urban Truck (UT) | Calculated on sales prediction | 10 [23] |
| Highway Truck (HT) | Proportion in truck fleet may drop to 50% by 2050 |
| Road Levels | Design Speed (km/h) | A | B | |
|---|---|---|---|---|
| Urban Roads [32] | Express Way | 80 | 1.448 | 1.435 |
| Arterial Road | 60 | 0.905 | 3.497 | |
| Secondary Trunk Road | 40 | 0.726 | 5.897 | |
| Bypass | 30 | 0.596 | 1.457 | |
| Highways [33] | Super Highway | 100 | 0.15 | 4 |
| National and Provincial Highway | 80 | |||
| Rural Highway | 30 | |||
| Rural Roads | 20 | |||
| Mechanisms | Applied Vehicle Types | Level I and II ICV | Level III ICV | Sources | ||
|---|---|---|---|---|---|---|
| OPT | CON | OPT | CON | |||
| Less Hunting for Parking | NPV | −5% | −2% | −11% | −5% | [22,37] |
| More Travel due to Higher Efficiency | All | 4% | 13% | 14.5% | 60% | [21,27,28] |
| More Travel of Underserved Population | PV | 0 | 0 | 2% | 14% | [27,38] |
| Ridesharing | PV | 0 | 0 | −12% | 0 | [22] |
| Empty Mileage | PV | 0 | 0 | 0 | 8.68% | [39] |
| Transit Modes Shift | NPV | 0 | 0 | 0 | 10% | Estimated based on [40] |
| Functions 1 | ICV Levels | Accident Types [42] | Injury Reduction % | Fatality Reduction % | Sources | |||
|---|---|---|---|---|---|---|---|---|
| I | II | CON | OPT | CON | OPT | |||
| FSR ACC | √ | √ | Overspeed, improper acceleration | 16 | 30 | 16 | 45 | [44,45] |
| PCS | √ | √ | Improper braking, accident with pedestrians | 20.9 | 30.6 | 9.9 | 19.9 | [15] |
| LCA | √ | √ | Illegal lane change, illegal overtaking, improper steering | 27 | 90 | 27 | 90 | [13,44] |
| LKA | √ | √ | Driving against traffic, improper steering | 29 | 32 | 25 | 27 | [46] |
| ESC | √ | √ | Overspeed, improper steering | 7 | 35 | 21.6 | 32 | [14,16] |
| AP | √ | Illegal reverse, illegal parking | 75 | 100 | 75 | 100 | [47] | |
| NV | √ | √ | Night accidents | 0 | 20 | 0 | 20 | [44] |
| DM | √ | √ | Drunk driving, driver fatigue | 75 | 99.3 | 75 | 99.3 | [48,49] |
| AFS | √ | √ | Illegal lighting usage | 0 | 91 | 0 | 88 | [18] |
| TSR | √ | Overspeed, driving against traffic, illegal turning back, illegal road occupation | 95 | 99 | 95 | 99 | [50] | |
| eCall | √ | √ | All fatalities | 0 | 0 | 2.4 | 4.6 | [17] |
| IMA | √ | Illegal meeting, illegal overtaking, violation of traffic signals, do not give way | 22.7 | 62 | 22.7 | 62 | [25,44] | |
| WILLWARN | √ | Do not give way, road related accidents | 1.4 | 2 | 2 | 2.5 | [44,51] | |
| √ | Adverse weather | 4.7 | 6.8 | 6.2 | 13 | |||
| Function Types | Functions | Scenario | CF(β, IP) |
|---|---|---|---|
| Single Vehicle | FSR ACC, PCS, LDW, LKA, ESC, AP, DM, TSR, eCall | Vehicle equipped | |
| Multiple Vehicle | AFS, NV | None vehicle equipped | |
| Single vehicle equipped | |||
| Both vehicles equipped | |||
| Vehicle to Vehicle | - | None vehicle equipped | |
| Single vehicle equipped | |||
| Both vehicles equipped | |||
| Vehicle to Infrastructure | IMA, WILLWARN | Neither equipped | |
| Only vehicle equipped | |||
| Only infrastructure equipped | |||
| Both equipped |
| Mechanisms | Applied Vehicle Types | Effect Coefficient | ICV Levels | Sources | ||||
|---|---|---|---|---|---|---|---|---|
| CON | OPT | I | II | III | ||||
| Vehicle Design | Direct Energy Consumption | All | 1.2% | 0.9% | √ | √ | √ | Estimated based on [60] |
| Changes in Weight | All | 1% | 0.3% | √ | √ | √ | [60] | |
| Changes in Shape | All | −8.7% | −45% | √ | √ | [21,60] | ||
| Vehicle Usage | Eco-driving | All | 0 | −20% | √ | √ | √ | [21] |
| Platooning | HB, HT | −3% | −25% | √ | √ | [21] | ||
| Traffic Environment | Less Congestion | PV, UB, UT | −2% | −4% | √ | √ | √ | [21] |
| Higher Speed | HB, HT | 22% | 7% | √ | √ | [21] | ||
| Fewer Accidents | All | 0 | −1.9% | √ | √ | [20] | ||
| Fuel Types | Density (kg/L) | Life Cycle GHG Emissions Factor (g CO2 eq./MJ) | Fuel Price 1 | Sources | |
|---|---|---|---|---|---|
| Gasoline | 43.1 | 0.73 | 100.8 | 6115.2 RMB/tonne | [34,61,62] |
| Diesel | 42.6 | 0.84 | 102.5 | 5104.7 RMB/tonne | |
| CNG | 38.9 | - | 69.4 | 5.12 RMB/liter | |
| LNG | 38.9 | 0.45 | 75.4 | 3298.4 RMB/tonne | |
| Hydrogen | 120 | - | 48.4 | 93.6 RMB/kg | |
| Electricity | - | - | 198.6 (in 2015) to 111.2 (in 2050) | 388.25 RMB/kKWh | Calculated based on [63,64] |
| PHEV 2 | 38% × Value of Fuel + 62% × Value of Electricity | [65] | |||
| Cost Types | Initial Cost Per Vehicle (RMB Per Vehicle Per Year) | Mechanisms | Effect Coefficient | Sources | |
|---|---|---|---|---|---|
| Automotive Manufacturers | R&D Cost | PV: 1259 Bus: 13,366 Truck: 2516 |
| OPT: −4% CON: +15.4% | [68] |
| Production Cost | PV: 67,779 Bus: 292,733 Truck: 95,401 |
| OPT: −0.2% CON: 0 | [69] | |
| Marketing Cost | PV: 6148 Bus: 24,430 Truck: 3478 |
| OPT: −10% CON: 0 | [70] | |
| Commercial Fleet Operators | Financial Cost | NPV: 3700 CPV: 8000 Bus: 5400 UT: 3000 HT: 4500 |
| Level I ICV: 0 Level II ICV: −25% Level III ICV: −50% | [67,71] |
| Cleaning Cost | 0 |
| Level III ICV: Extra 50 RMB per 40 operations | [67] | |
| Labor cost | CPV: 67,200 Bus: 54,000 Truck: 107,000 |
| Level III ICV: −100% | Based on market survey 1 |
| Value Types | Mechanisms | Additional Values of ICVs | Sources | ||
|---|---|---|---|---|---|
| Level I | Level II | Level III | |||
| Product Value (RMB per vehicle) |
| 23,504 | 33,580 | 38,866 | [35,73] |
| Service Value (RMB per vehicle per year) |
| 187 | 280.5 | 374 | [68] |
| Data Value (RMB per vehicle per year) |
| 187 | 374 | 561 | [68] |
| V2I Road Infrastructure [76] | Cost Types | Assumptions | Cost Per Unit (RMB) | Total Cost (Billion RMB) | |
| DSRC | V2I Roadside Unit Construction | A roadside unit per 600 m | 109,620 | 1480.86 | |
| V2I Backhaul Network Construction | There are respectively 1500, 1000, and 500 systems in tier 1, 2–3 and 4–5 cities in China | 249,136 | 59.29 | ||
| Traffic Signal Control System Updating | 19,931 | 4.74 | |||
| Annual Maintenance | Mainly for roadside units | 18,997 per year | 256.63 per year | ||
| C-V2X | V2I Roadside Unit Construction | Doubling communication range of DSRC, a road unit per 1200 m | 109,620 | 740.43 | |
| V2I Backhaul Network Construction | Based on existing 4G base stations | 18,685 | 69.51 | ||
| Traffic Signal Control System Updating | The same with DSRC | 19,931 | 4.74 | ||
| Annual Maintenance | Mainly for roadside units | 18,997 per year | 128.32 per year | ||
| HD Maps | Professional mapping | $5000 cost per kilometer [78] | 31,142/km | 252.42 | |
| Crowdsourcing updating | Semidynamic information, upgrading per 30 seconds, cost rate at 2 cents per mile [79] | 0.077/km | 328.04 per year | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuang, X.; Zhao, F.; Hao, H.; Liu, Z. Assessing the Socioeconomic Impacts of Intelligent Connected Vehicles in China: A Cost–Benefit Analysis. Sustainability 2019, 11, 3273. https://doi.org/10.3390/su11123273
Kuang X, Zhao F, Hao H, Liu Z. Assessing the Socioeconomic Impacts of Intelligent Connected Vehicles in China: A Cost–Benefit Analysis. Sustainability. 2019; 11(12):3273. https://doi.org/10.3390/su11123273
Chicago/Turabian StyleKuang, Xu, Fuquan Zhao, Han Hao, and Zongwei Liu. 2019. "Assessing the Socioeconomic Impacts of Intelligent Connected Vehicles in China: A Cost–Benefit Analysis" Sustainability 11, no. 12: 3273. https://doi.org/10.3390/su11123273
APA StyleKuang, X., Zhao, F., Hao, H., & Liu, Z. (2019). Assessing the Socioeconomic Impacts of Intelligent Connected Vehicles in China: A Cost–Benefit Analysis. Sustainability, 11(12), 3273. https://doi.org/10.3390/su11123273