Optimal Power Control of Inverter-Based Distributed Generations in Grid-Connected Microgrid



Abstract
:1. Introduction
- (1)
- A new optimal PQ control scheme is proposed for inverter-based grid-connected microgrid to improve the microgrid dynamic stability.
- (2)
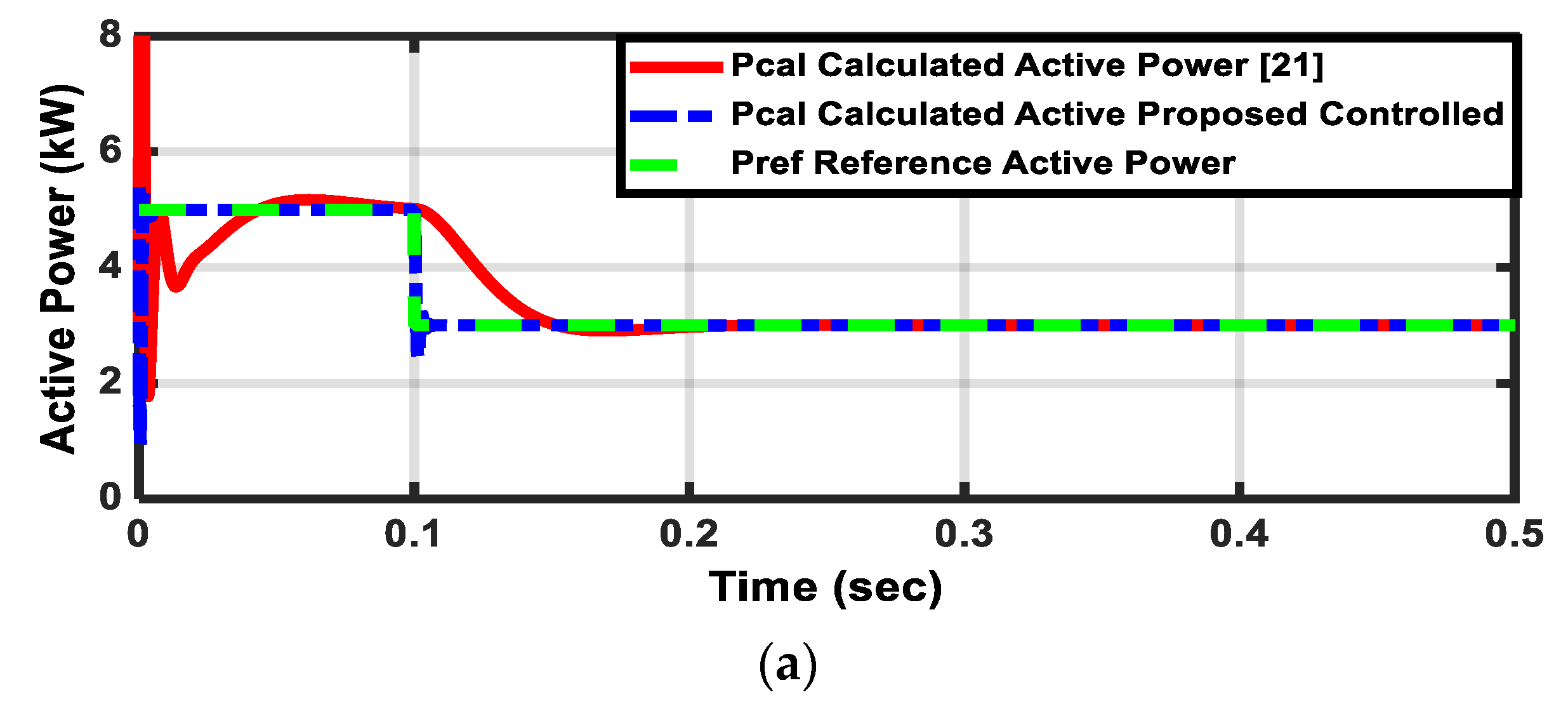
- The proposed scheme is compared with the exciting control scheme to validate the proposed controller robustness. The superiority of the proposed control is confirmed using both MATLAB simulation and RTDS experimental results for an inverter-based grid-connected microgrid.
- (3)
- The proposed controller has been verified for a two inverter-based grid-connected microgrid.
- (4)
- To the best of the authors’ knowledge, an optimal PQ control technique is firstly implemented in real time digital simulator (RTDS) to control the injected real and reactive powers of the inverter-based DGs in the grid-connected microgrid.
- (5)
- The superiority of the proposed method is demonstrated by experimental results using RTDS.
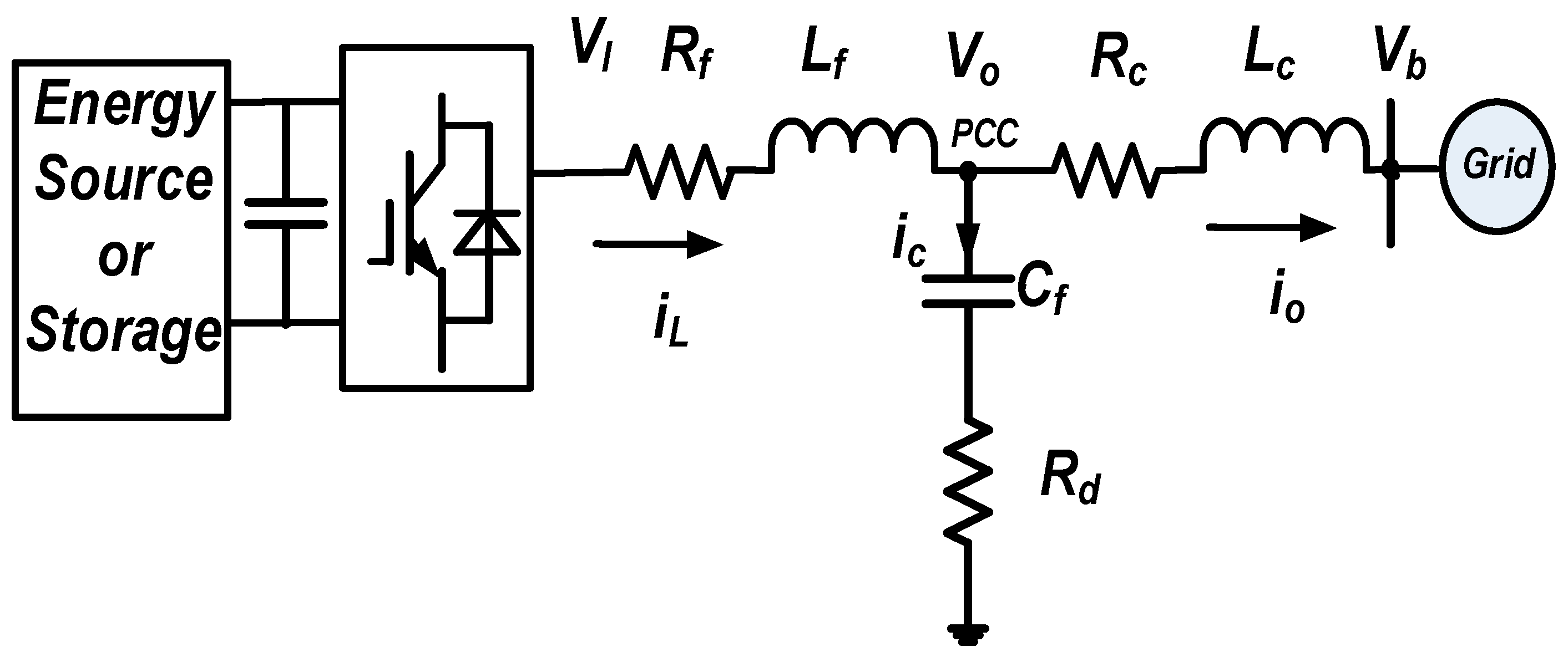
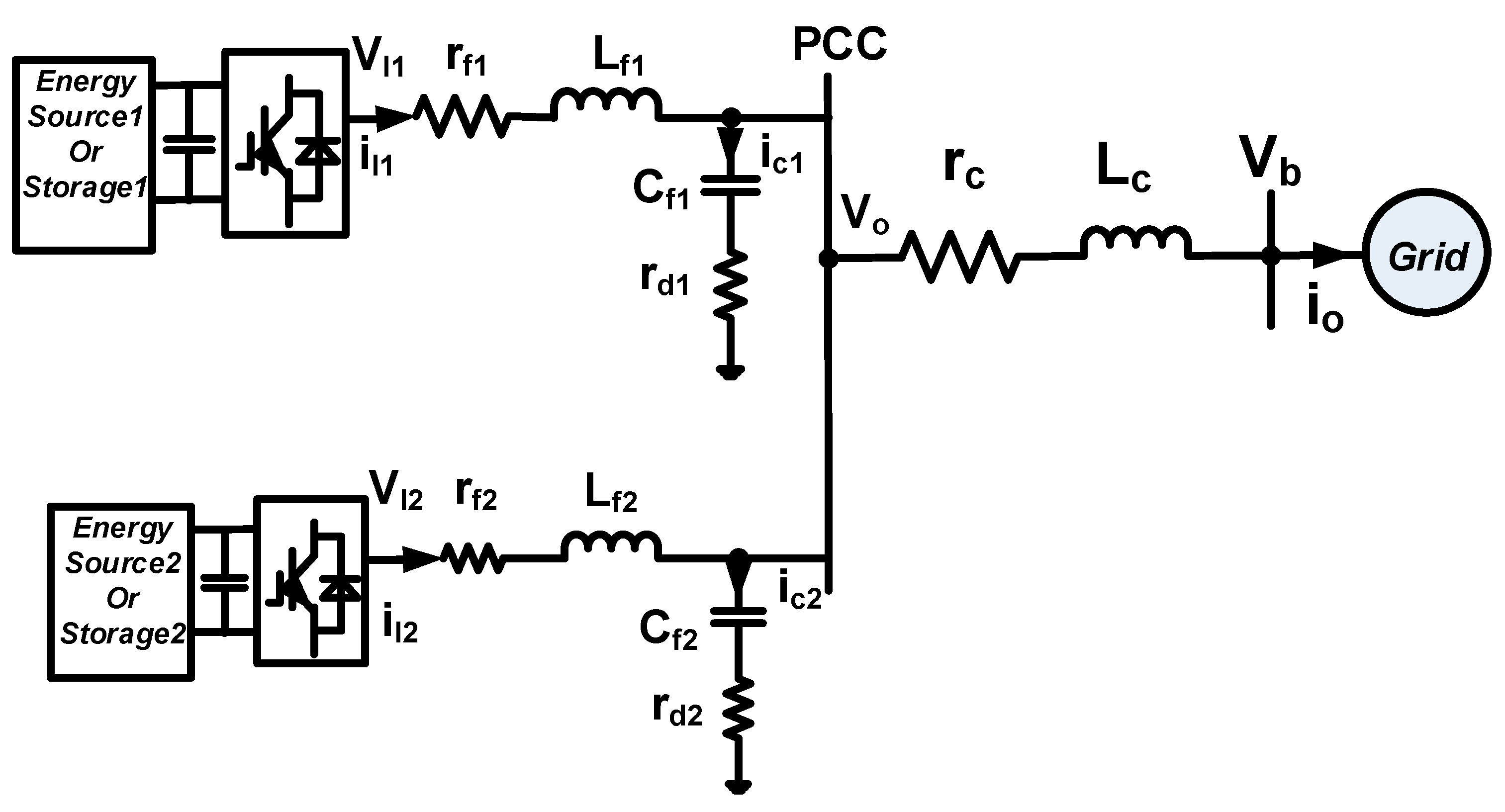
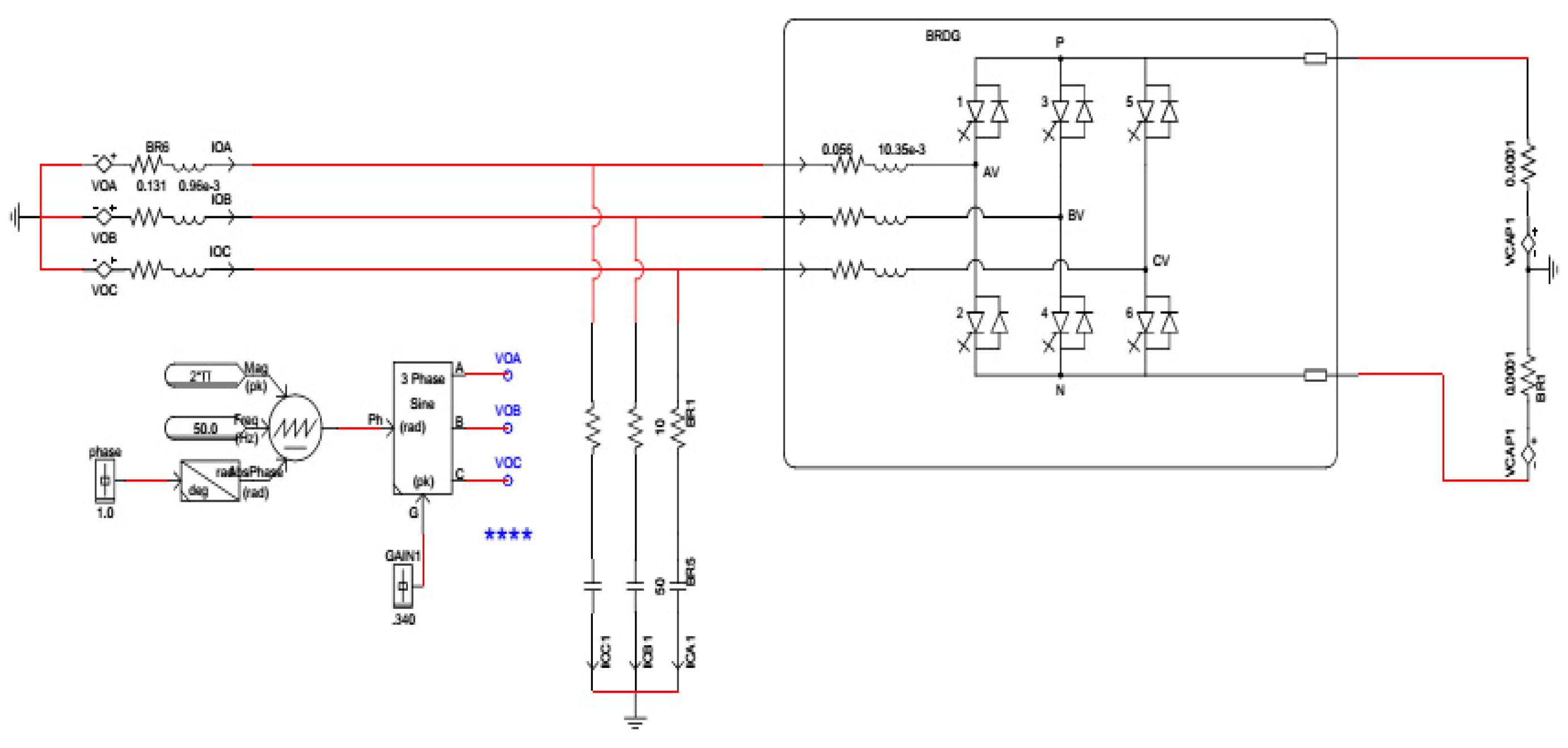
2. System Description
- Cf, Lf and Rf are the capacitance, inductance and resistance of the LC filter,
- Lc and Rc are the inductance and resistance of the coupling inductor,
- Rd is the damping resistance,
- iL is the coupling inductor current,
- io is the inverter output current,
- ic is the capacitor current,
- VI is the inverter output voltage,
- Vo is the PCC voltage,
- Vg is the grid voltage.
- Cf1, Lf1 and rf1 are the capacitance, inductance and resistance of the LC filter for DG1,
- Cf2, Lf2 and rf2 are the capacitance, inductance and resistance of the LC filter for DG2,
- iL1 and iL2 are the coupling inductor currents of DG1 and DG2 respectively,
- ic1 and ic1 are the capacitor currents of DG1 and DG2 respectively,
- VI1 and VI2 are the inverter output voltages of DG1 and DG2 respectively,
- rd1 and rd2 are the damping resistances.
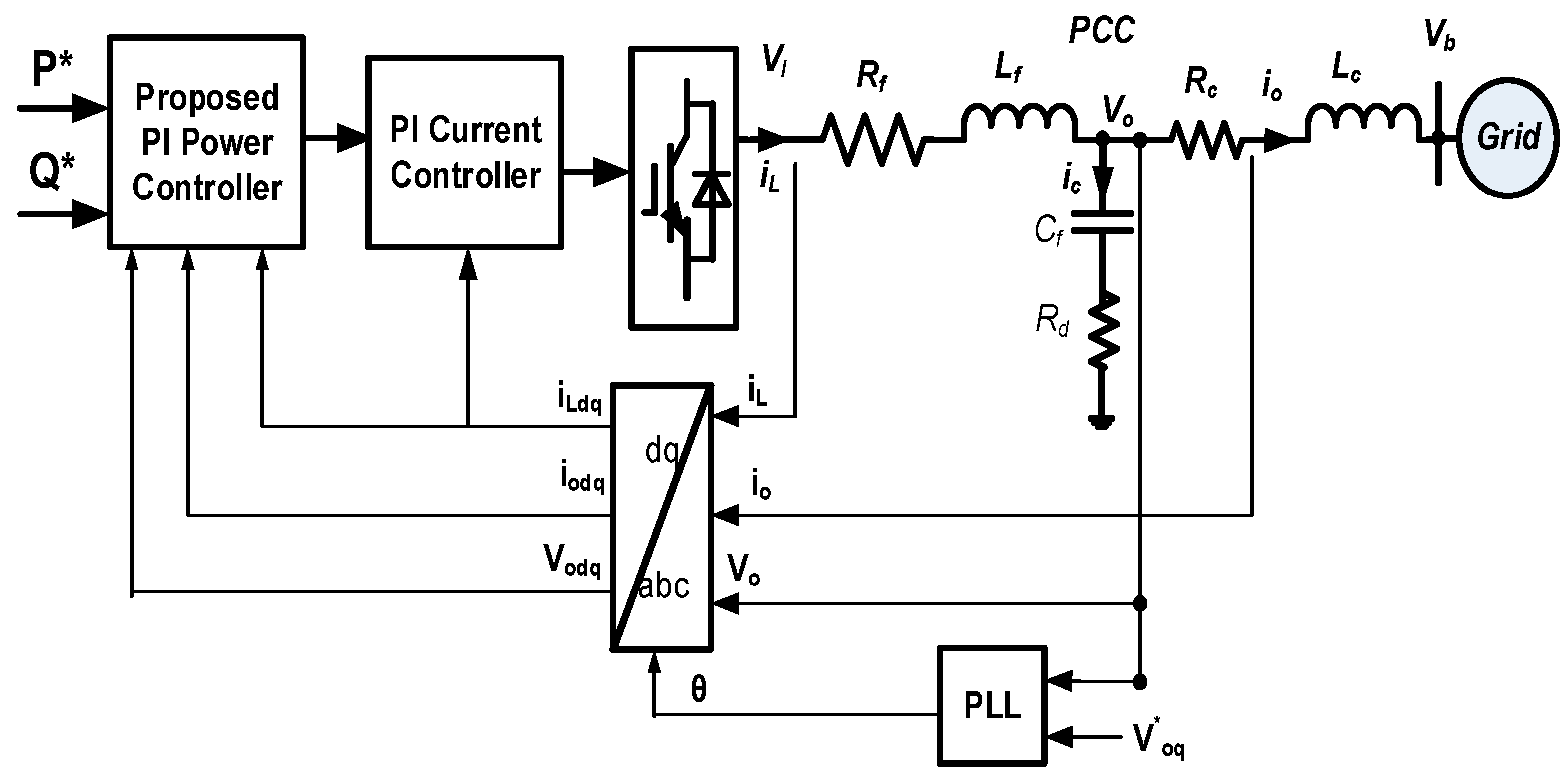
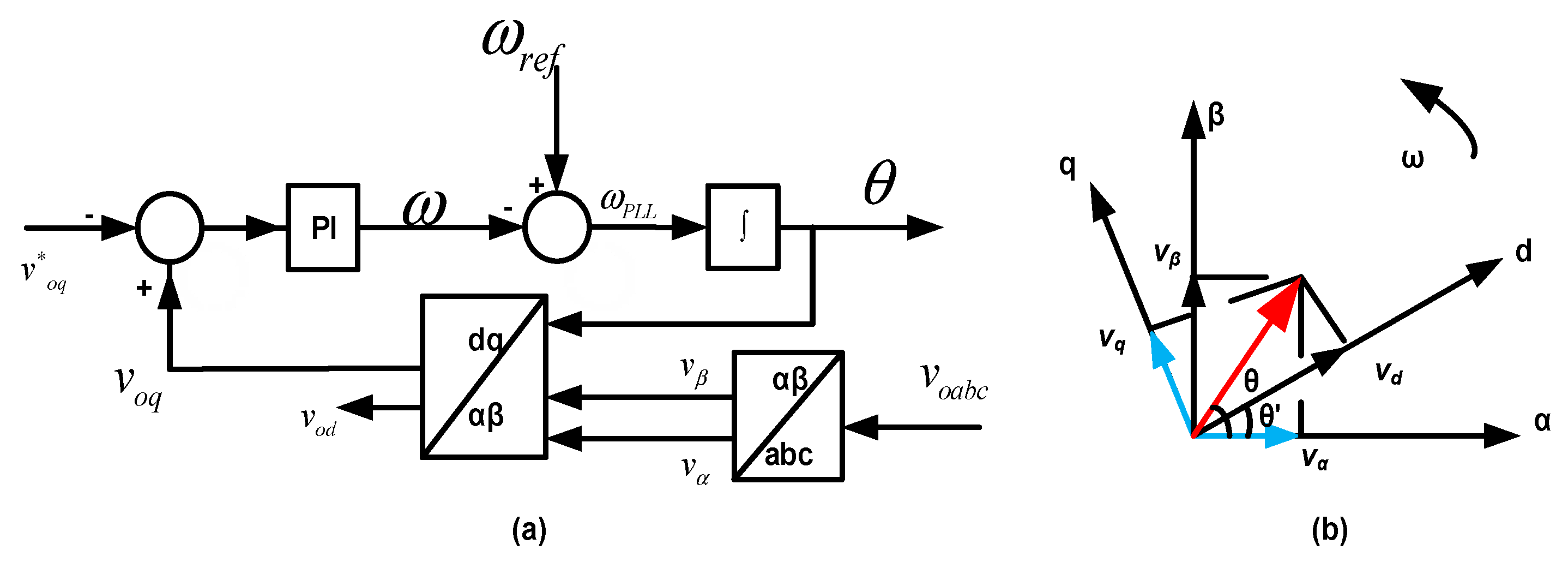
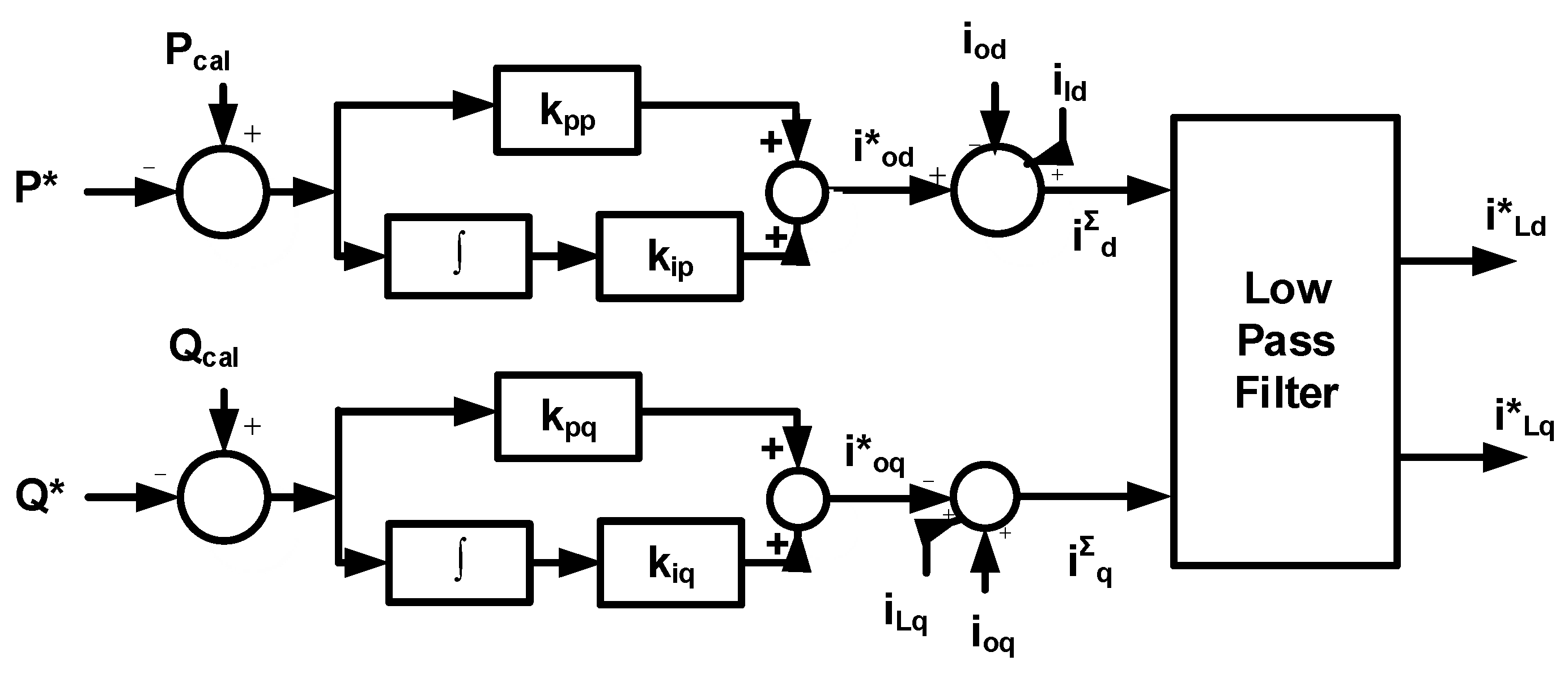
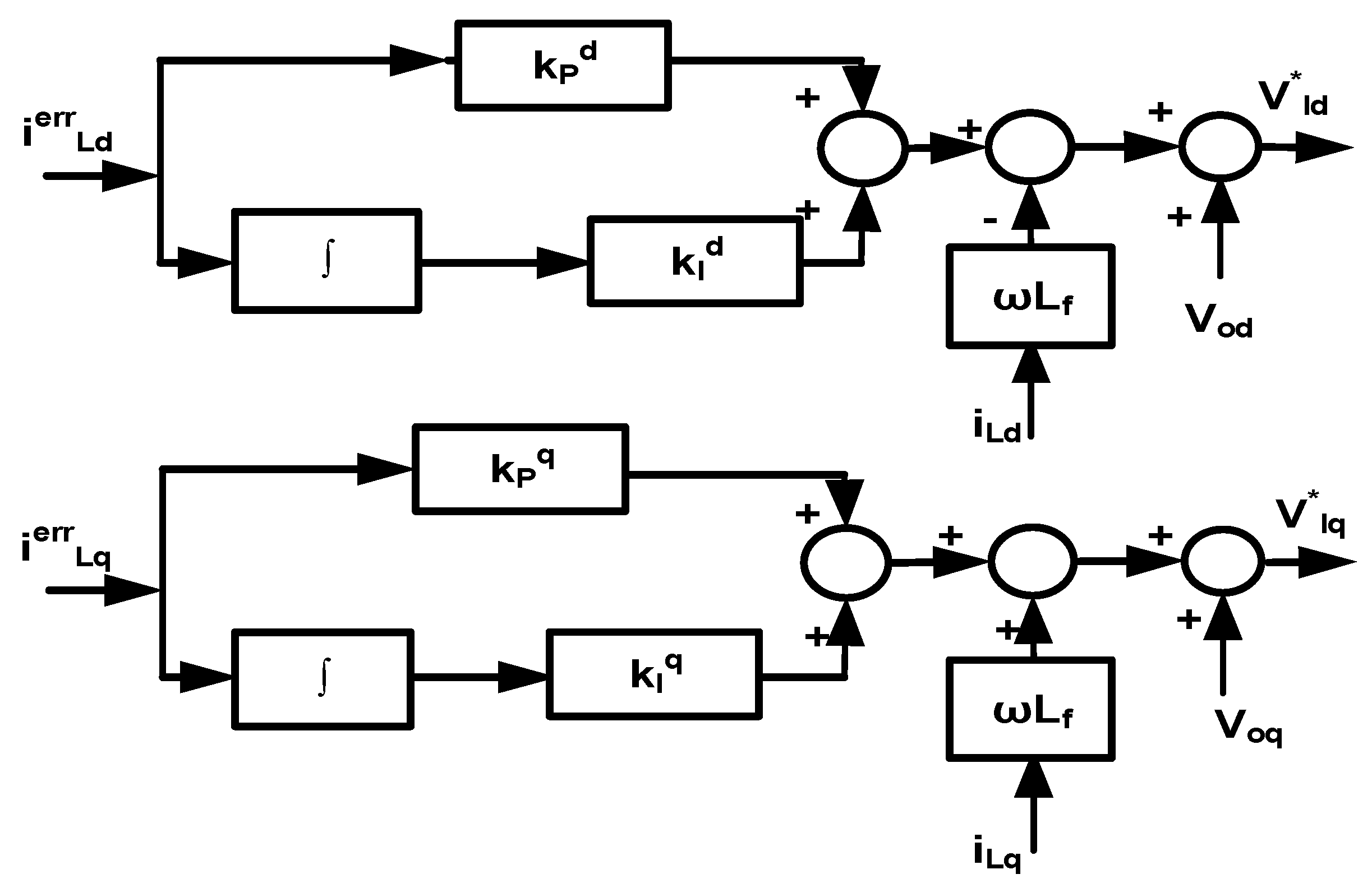
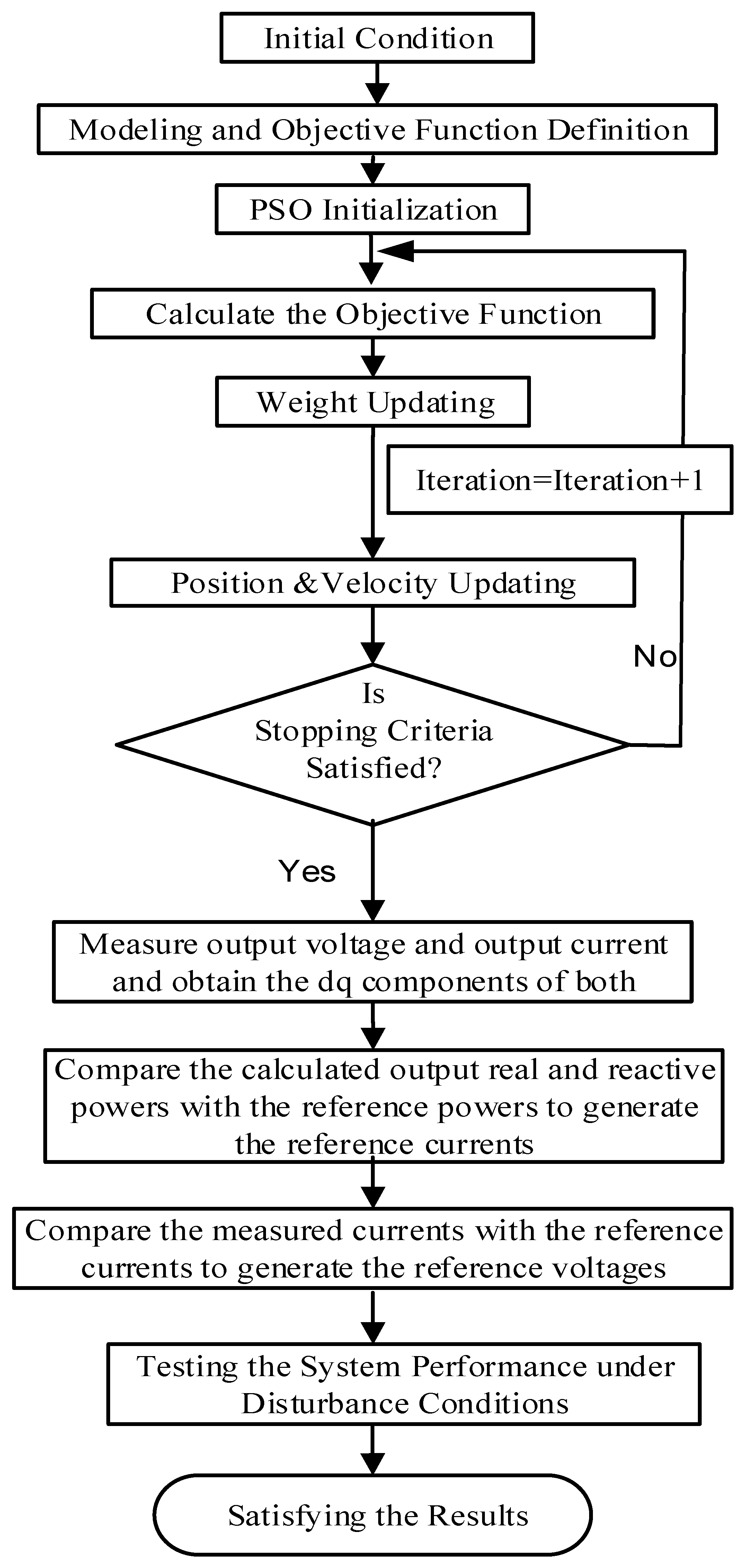
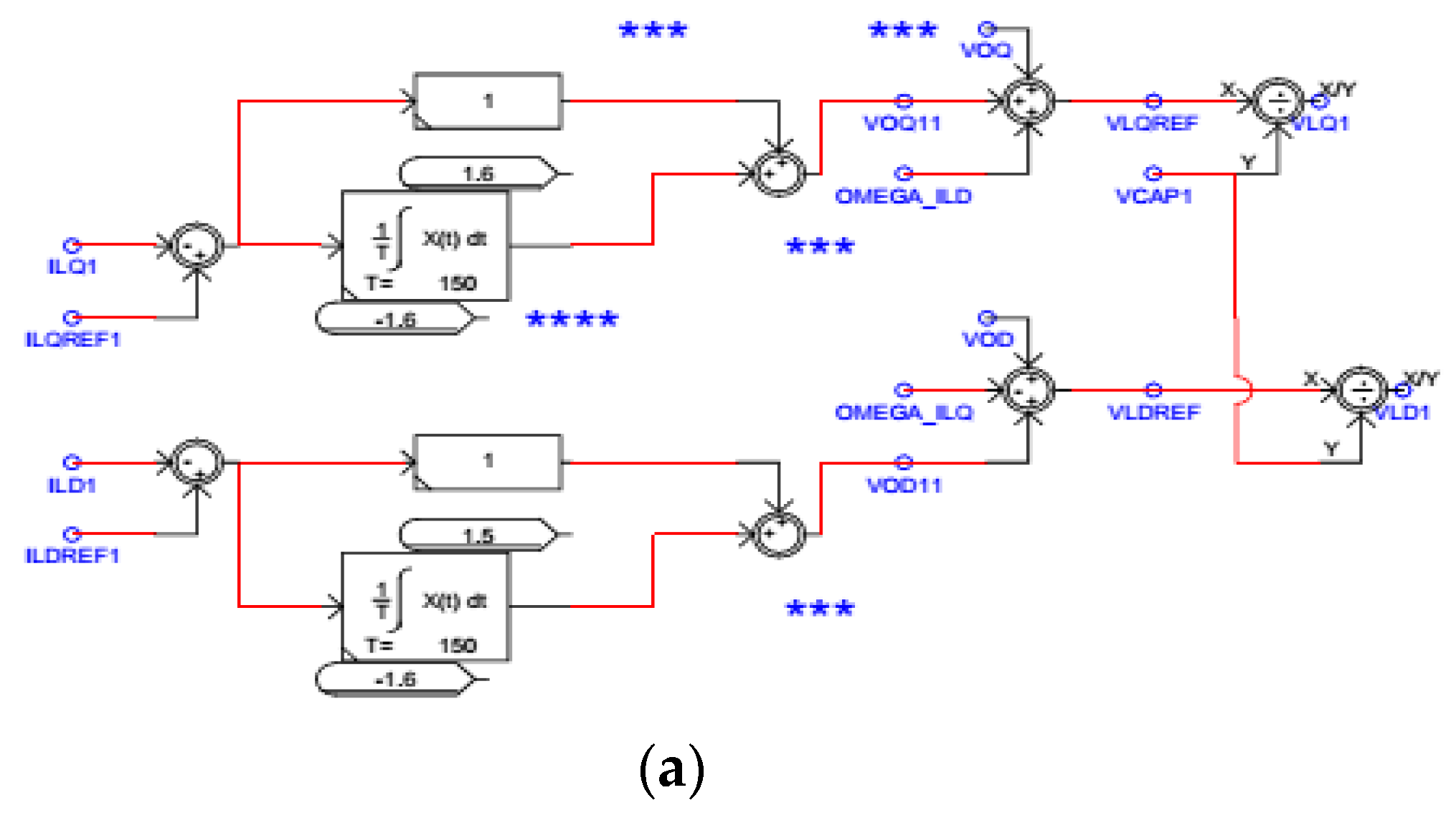
3. Proposed Methodology
4. Optimal Controller Design
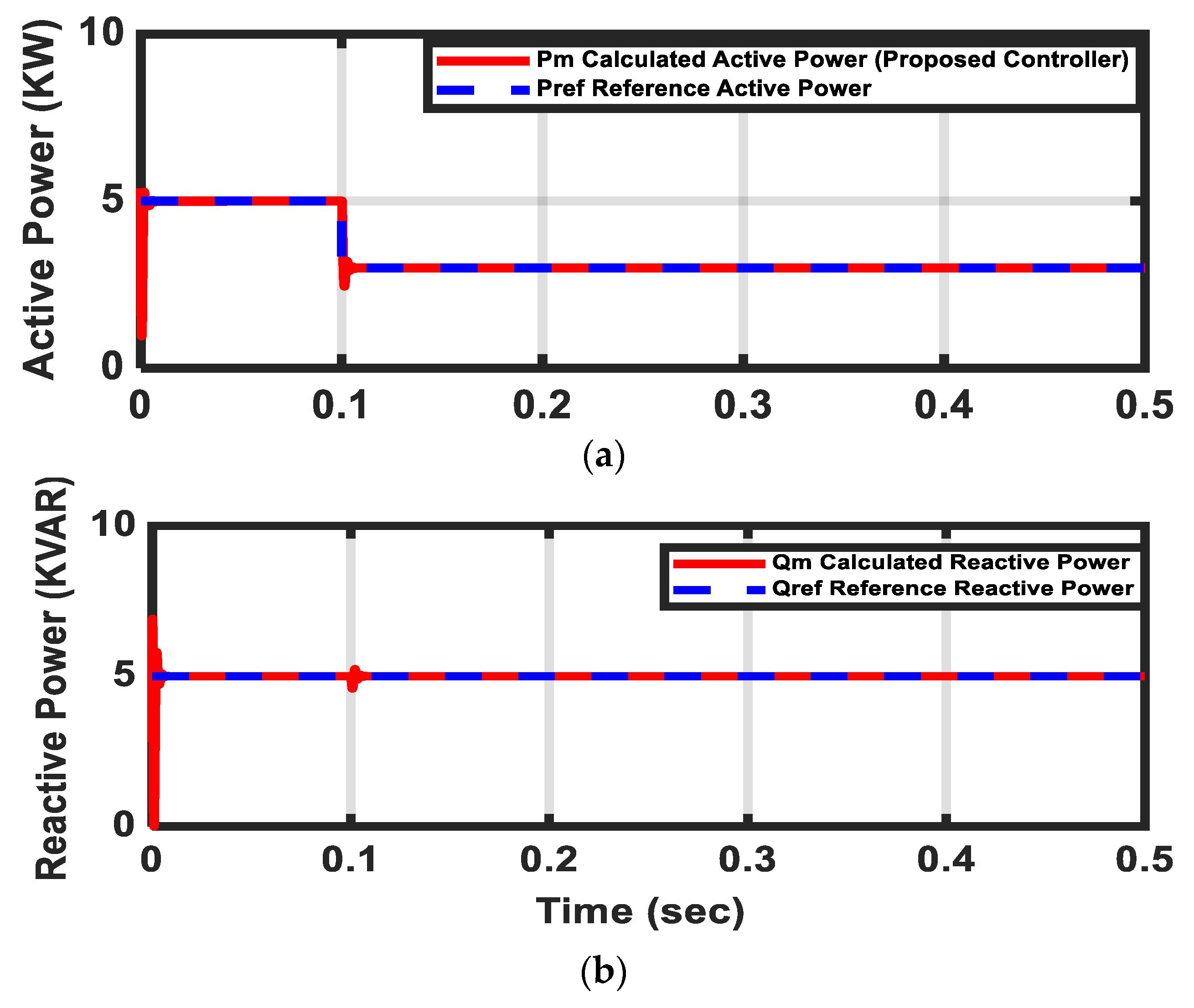
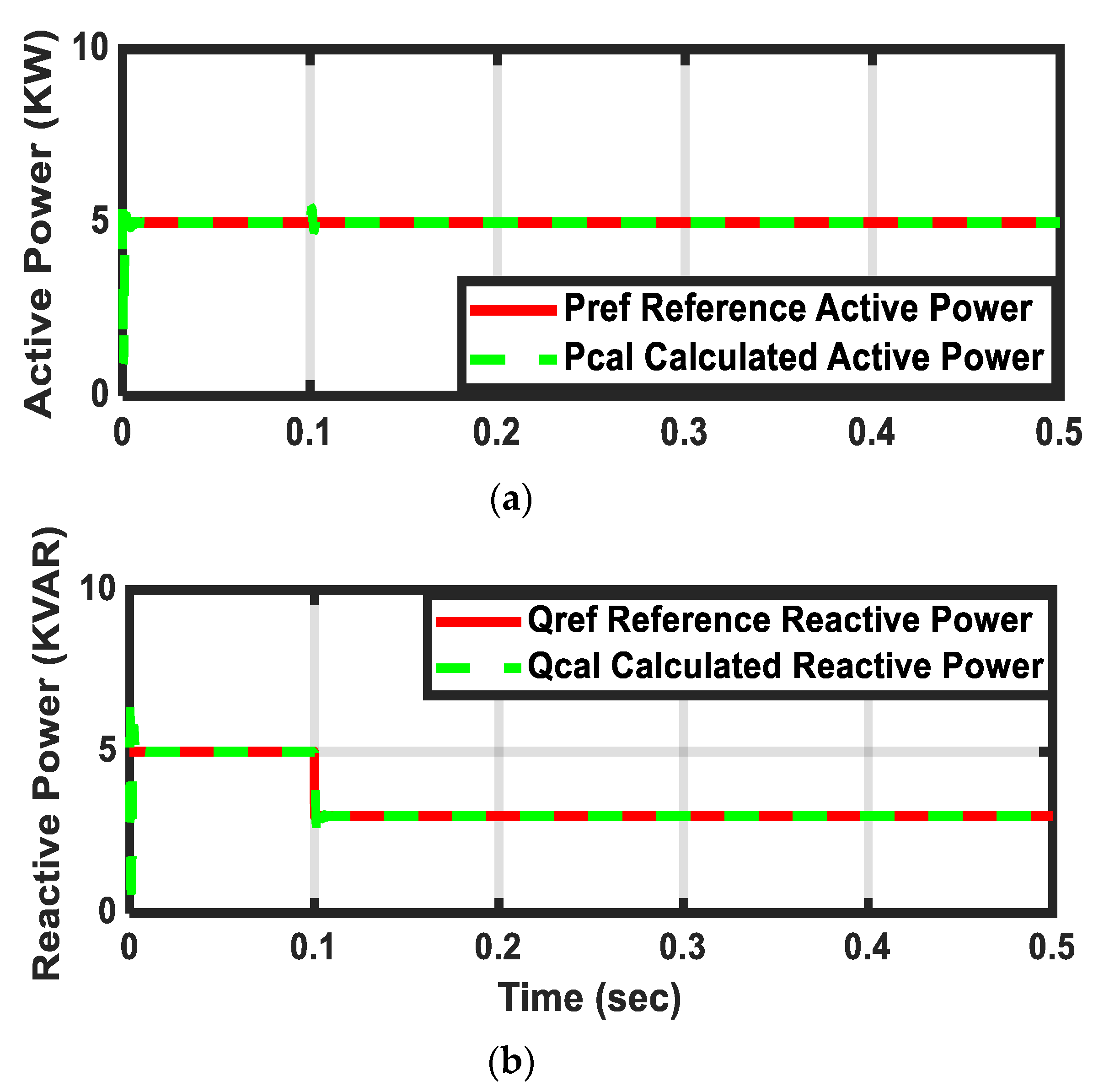
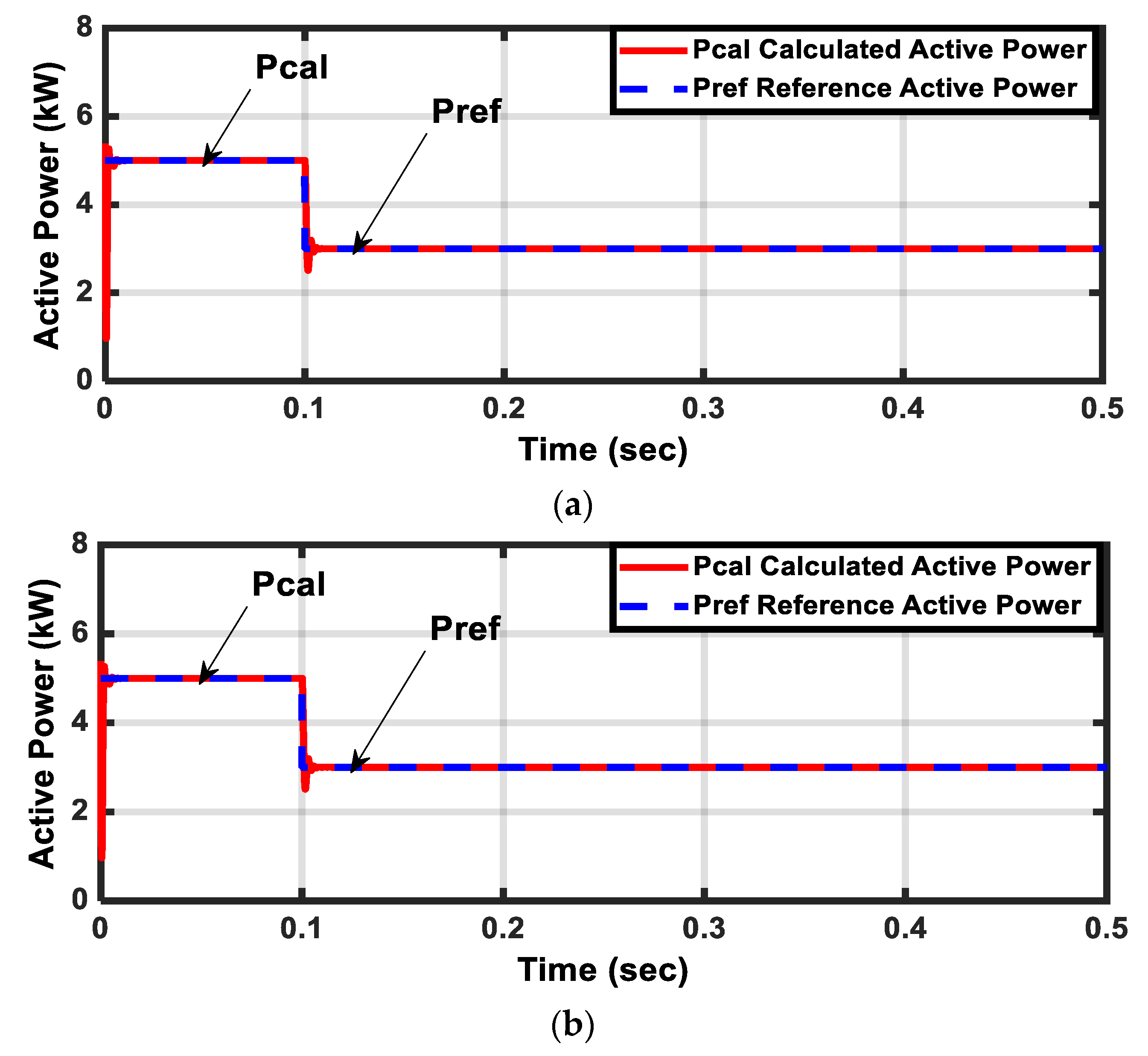
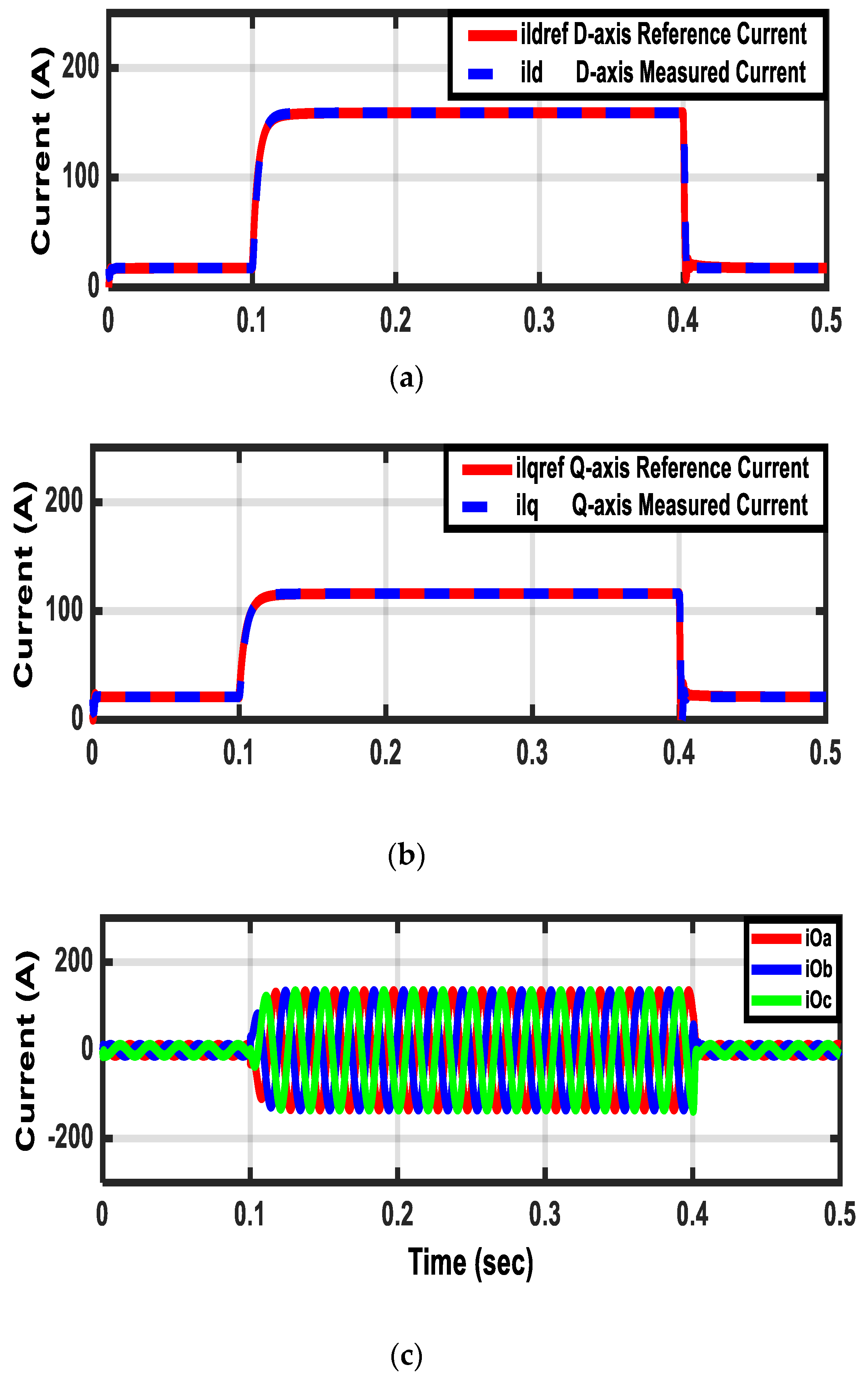
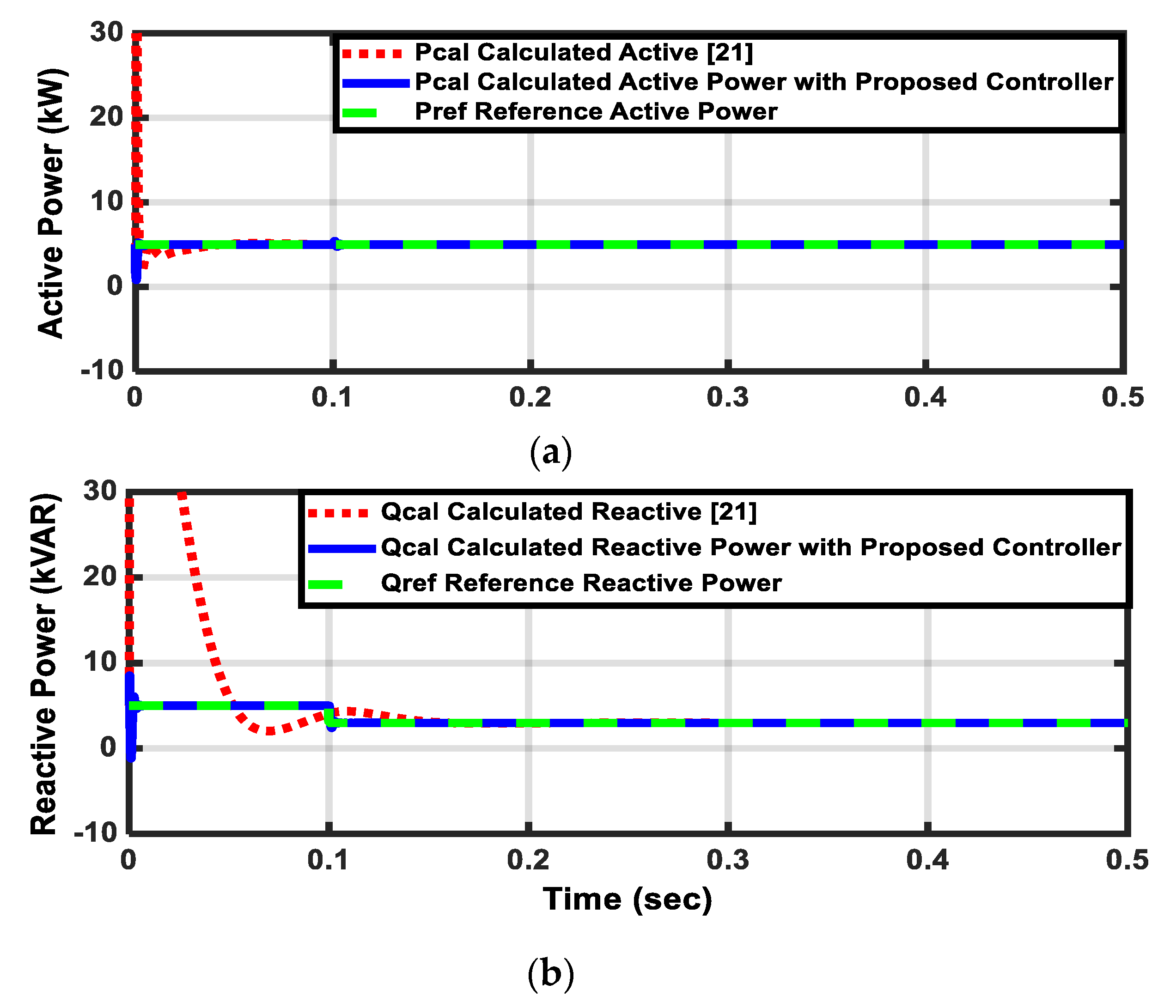
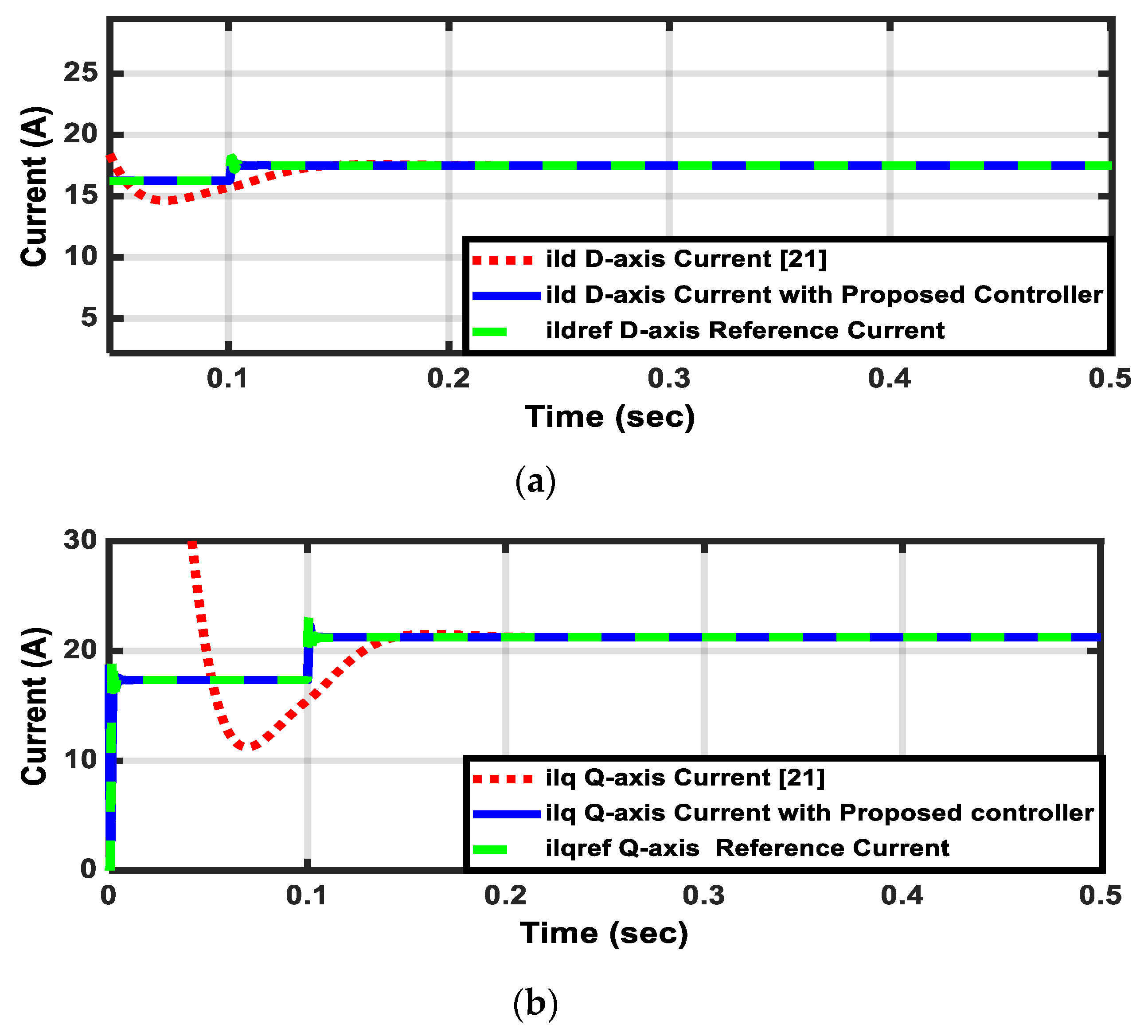
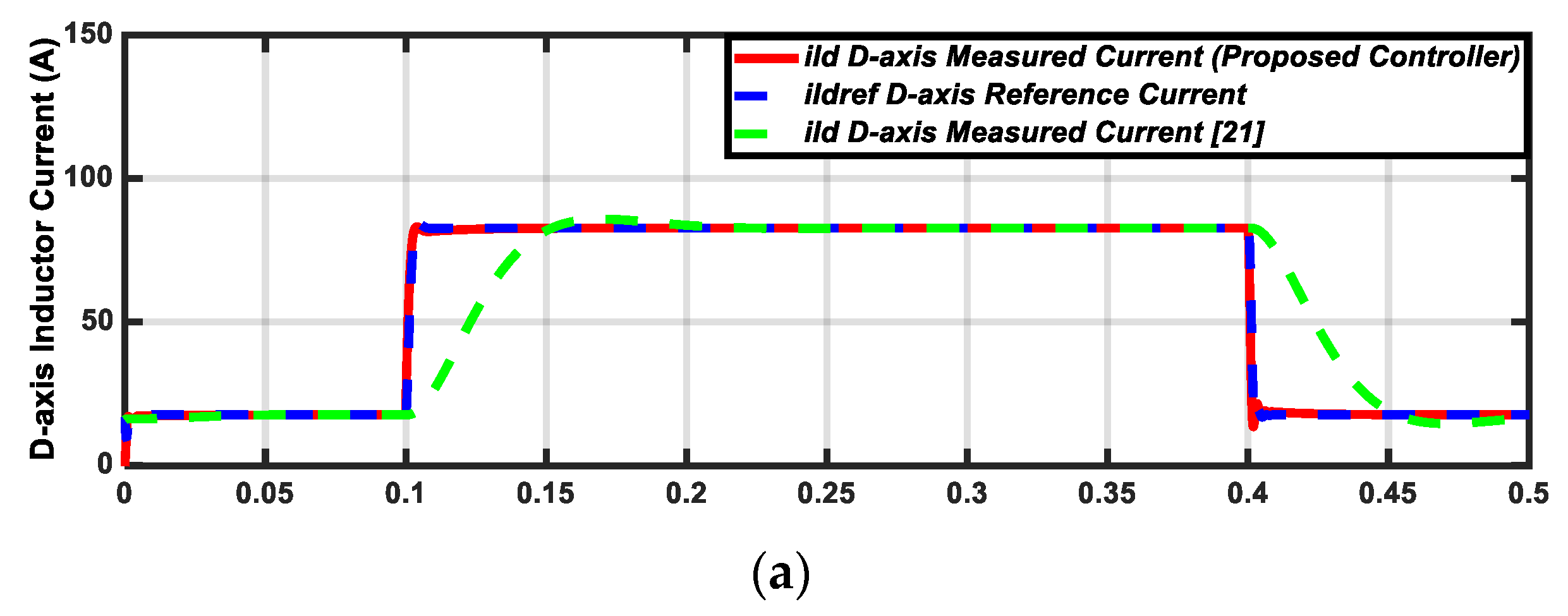
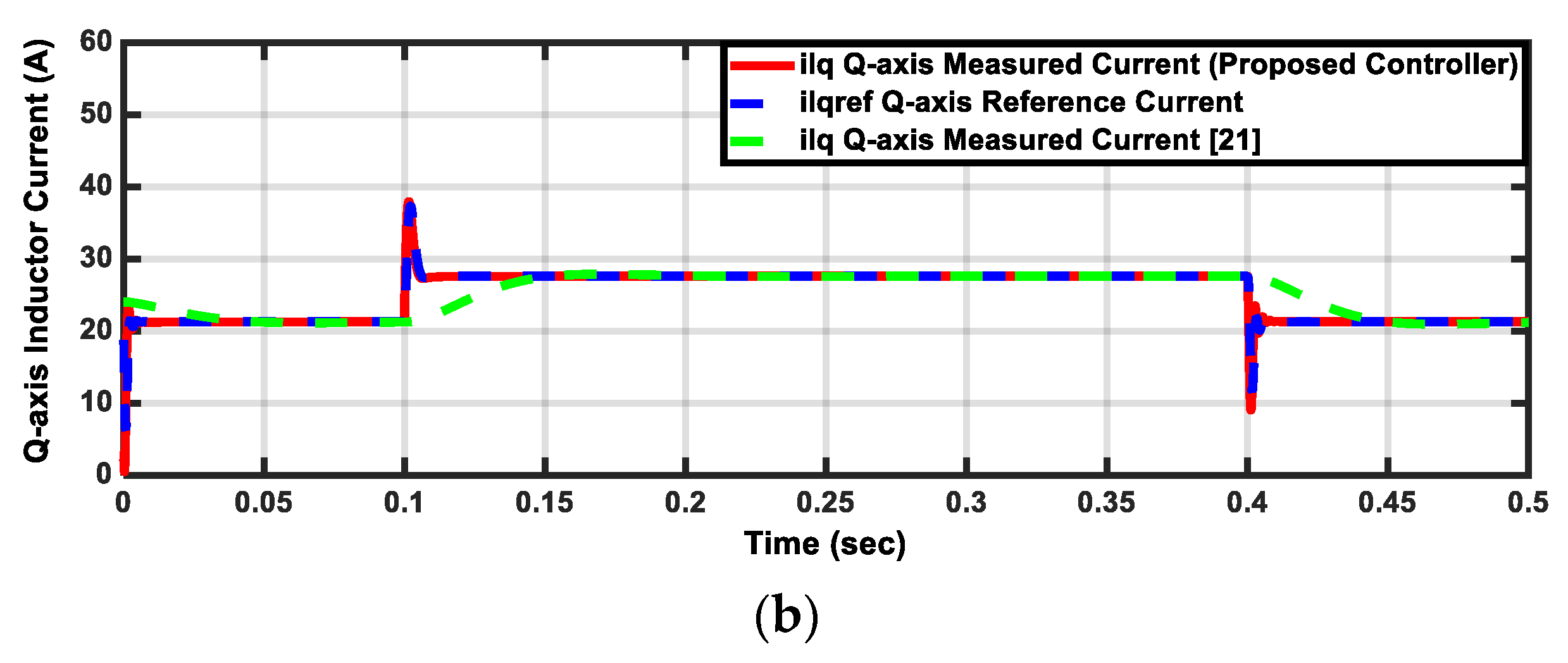
5. Simulation Results and Discussion
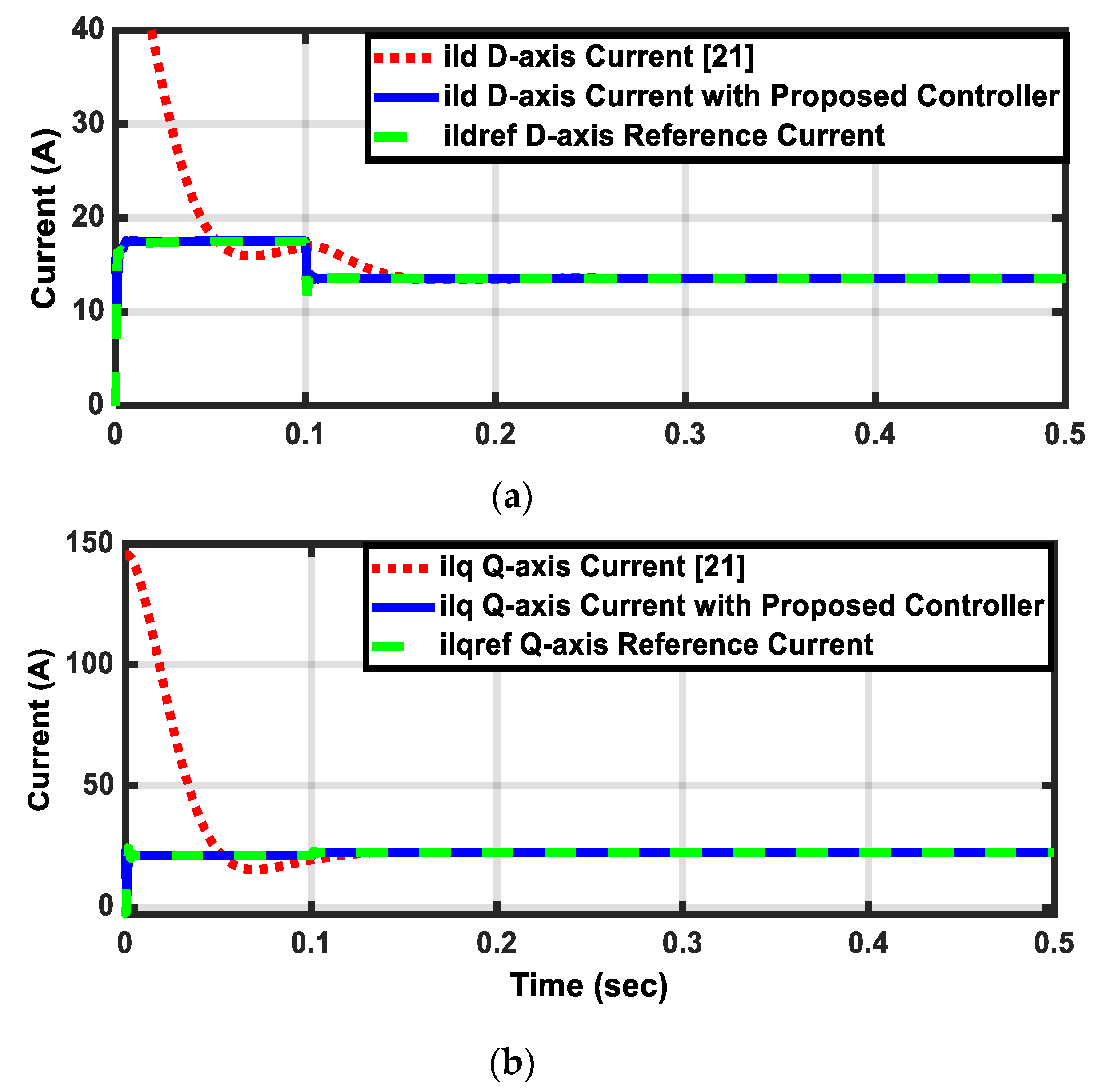
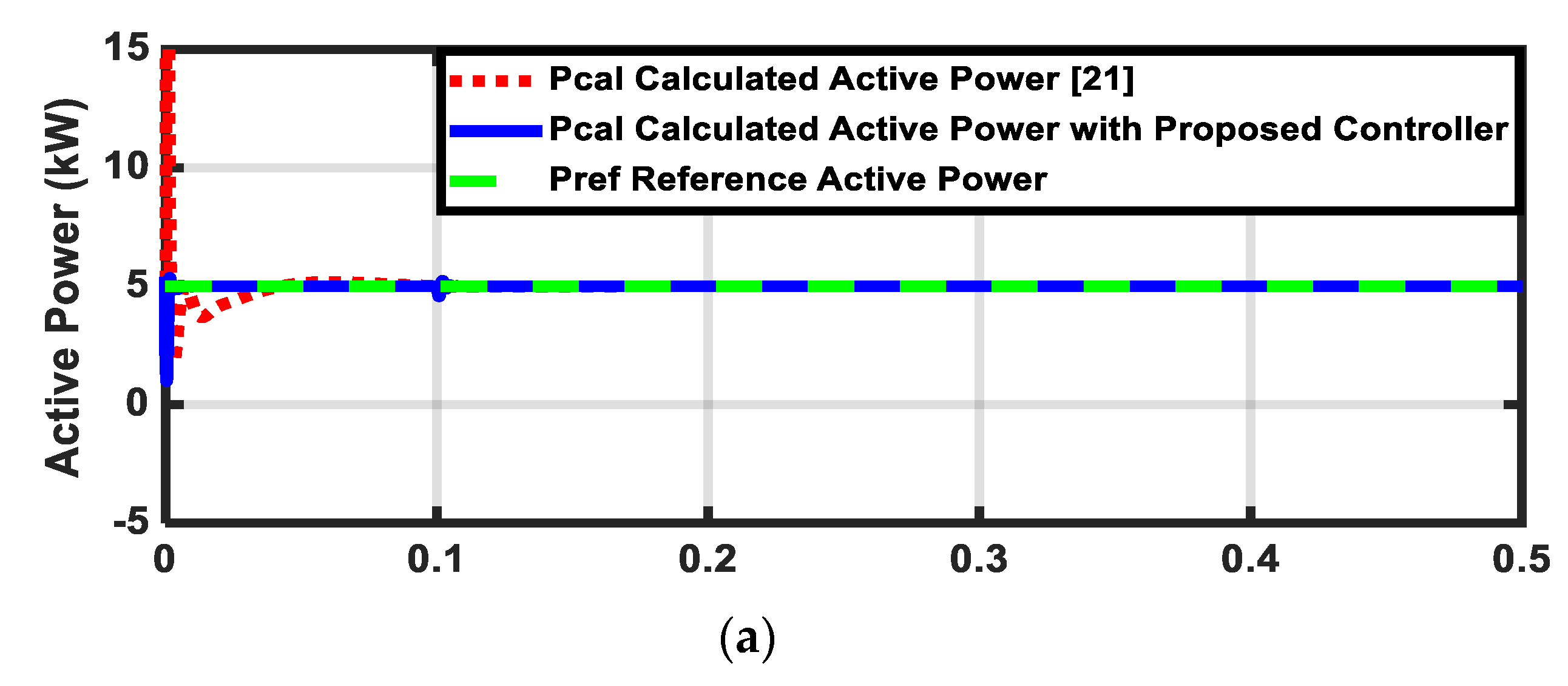
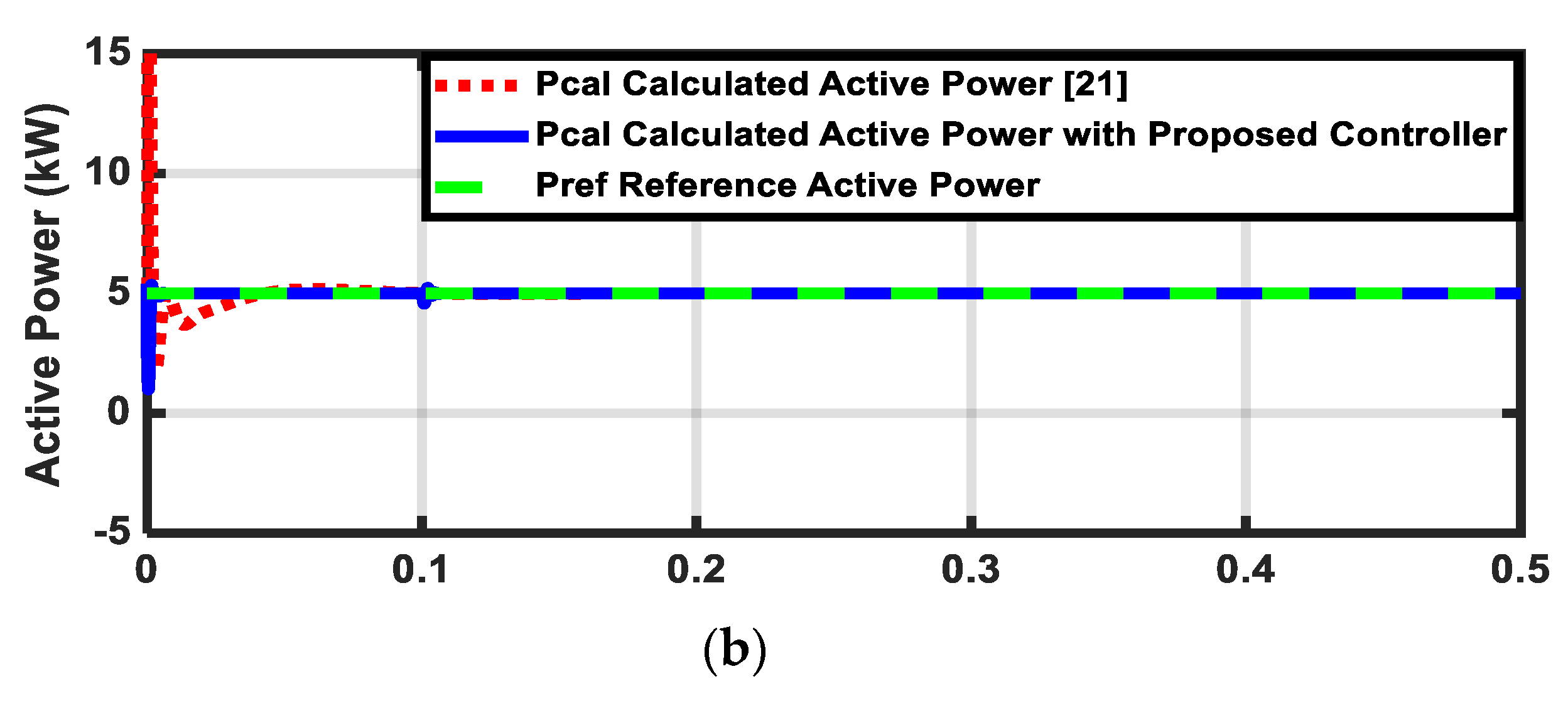
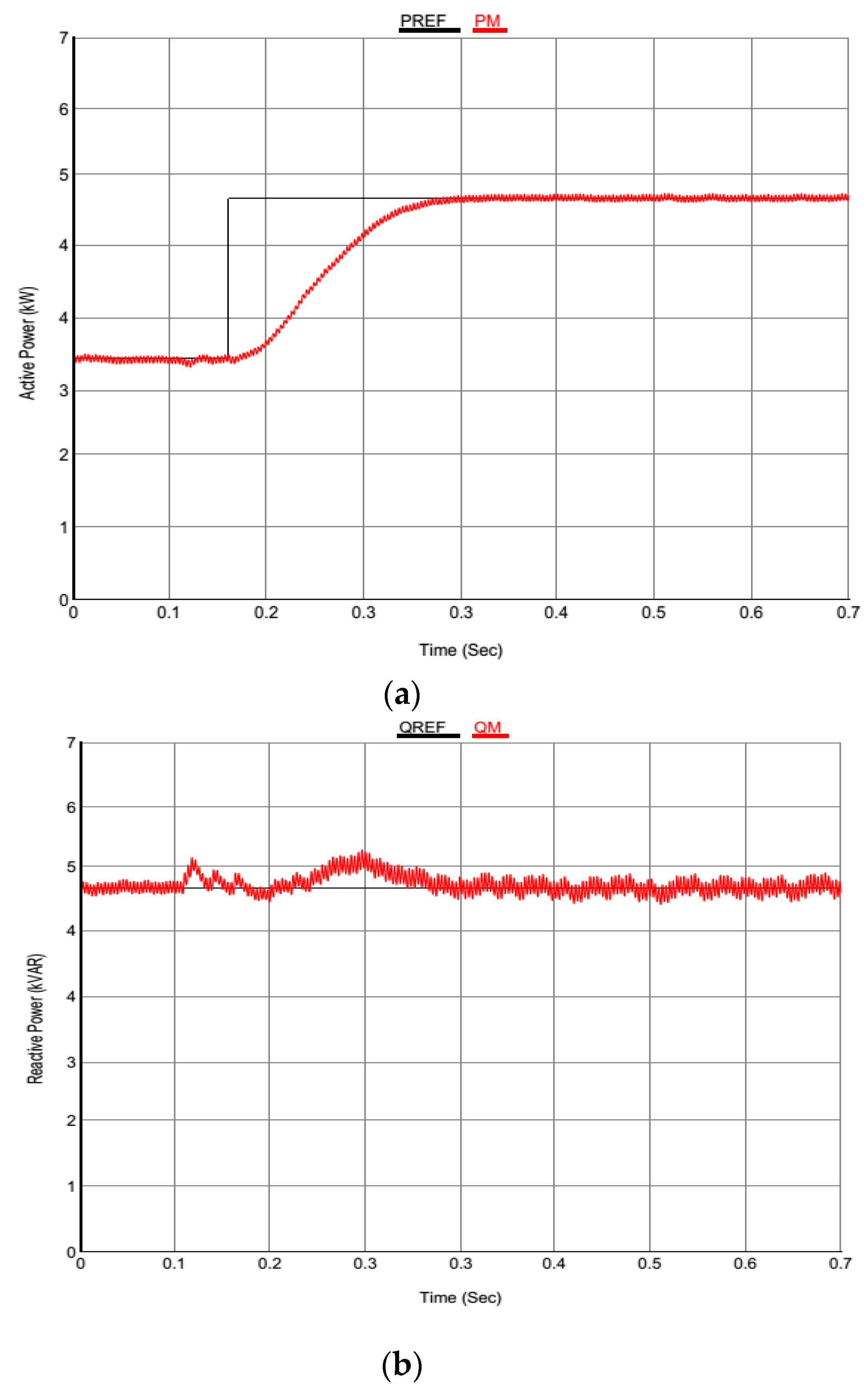
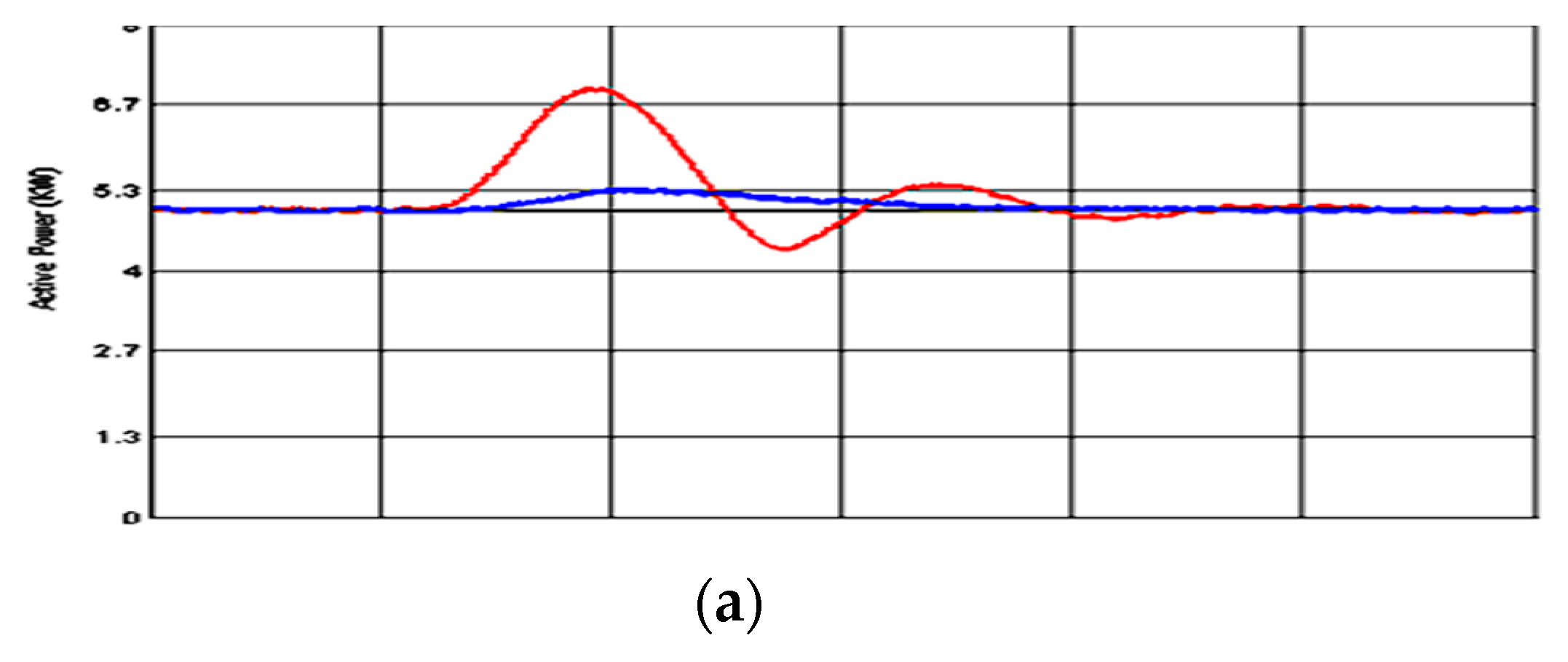
- Step change in the injected real power.
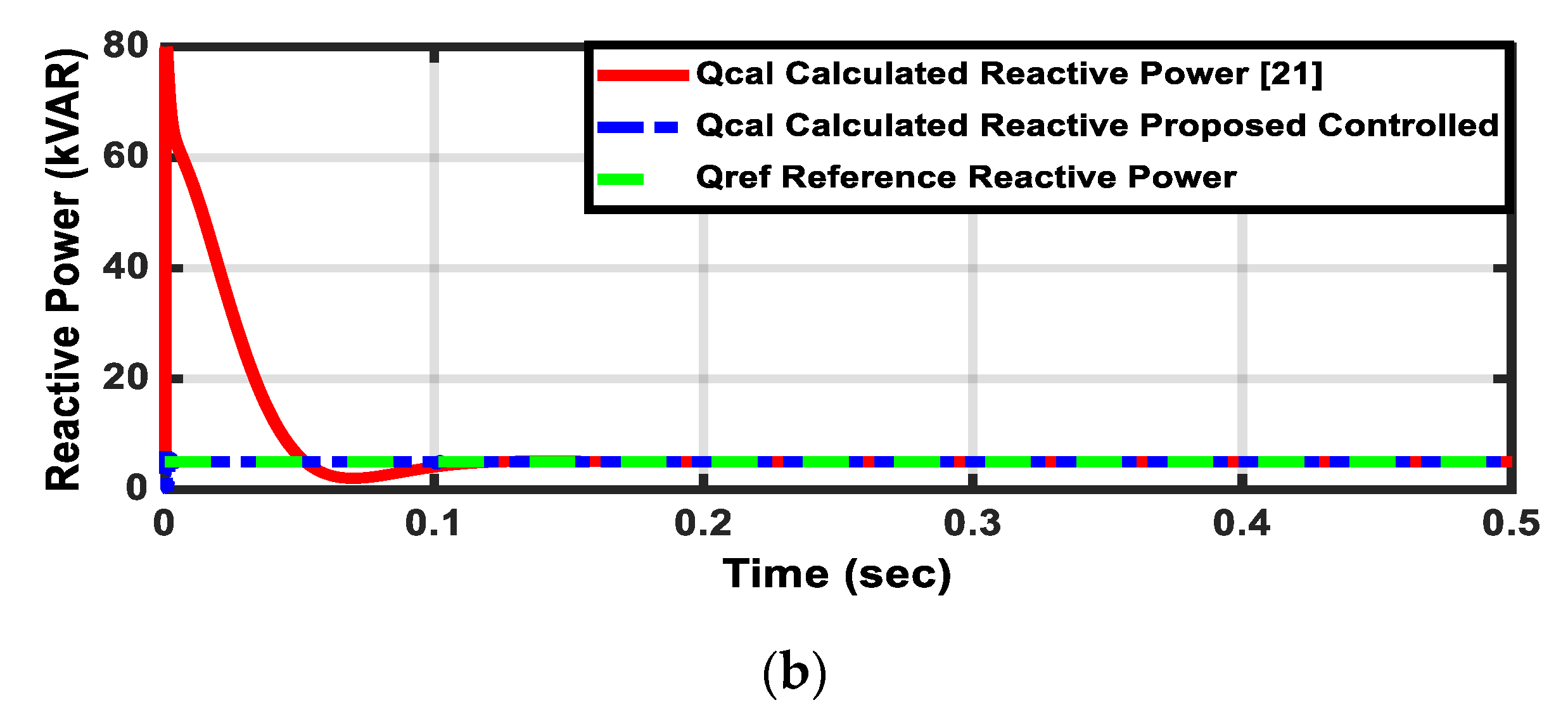
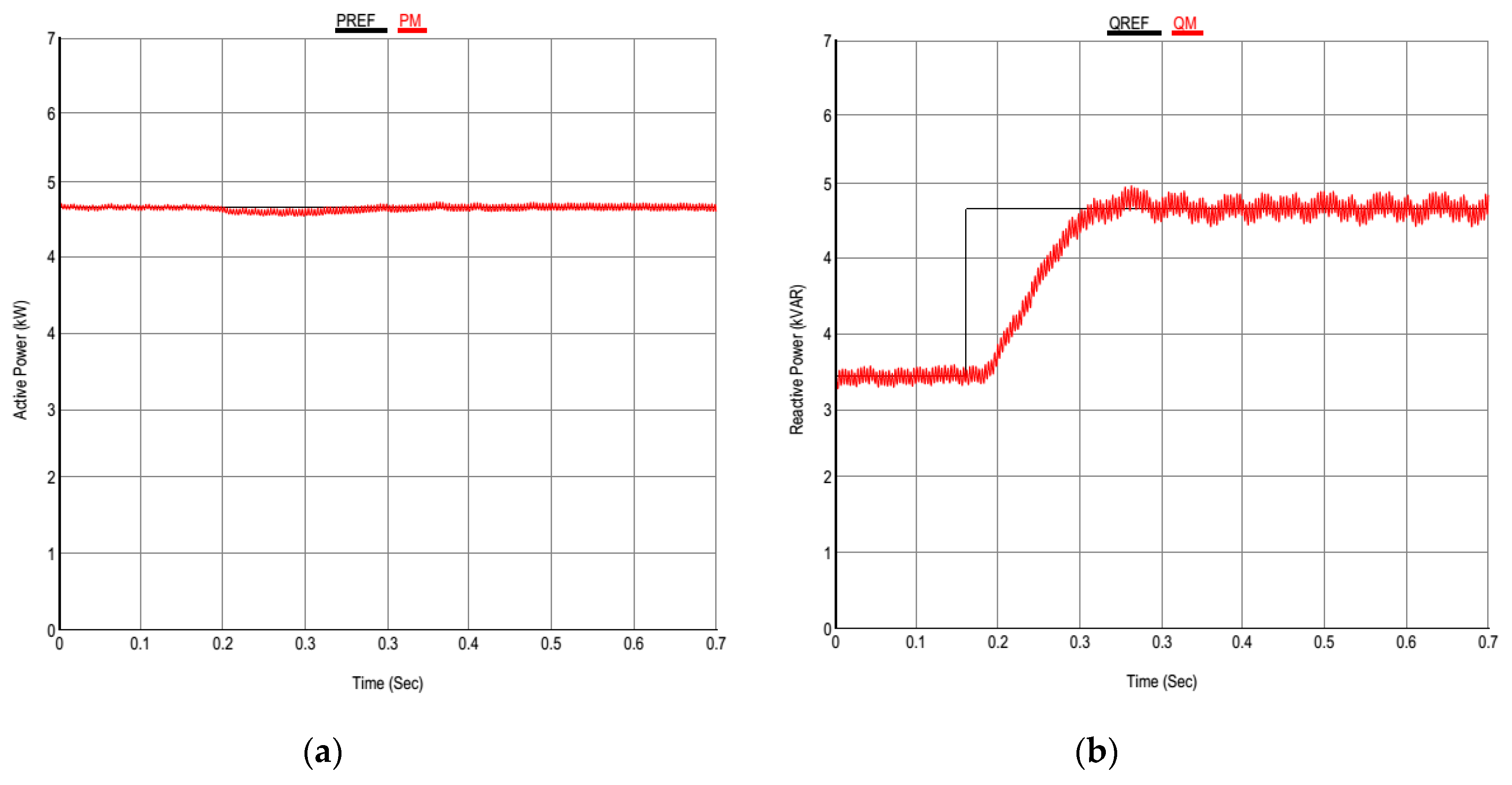
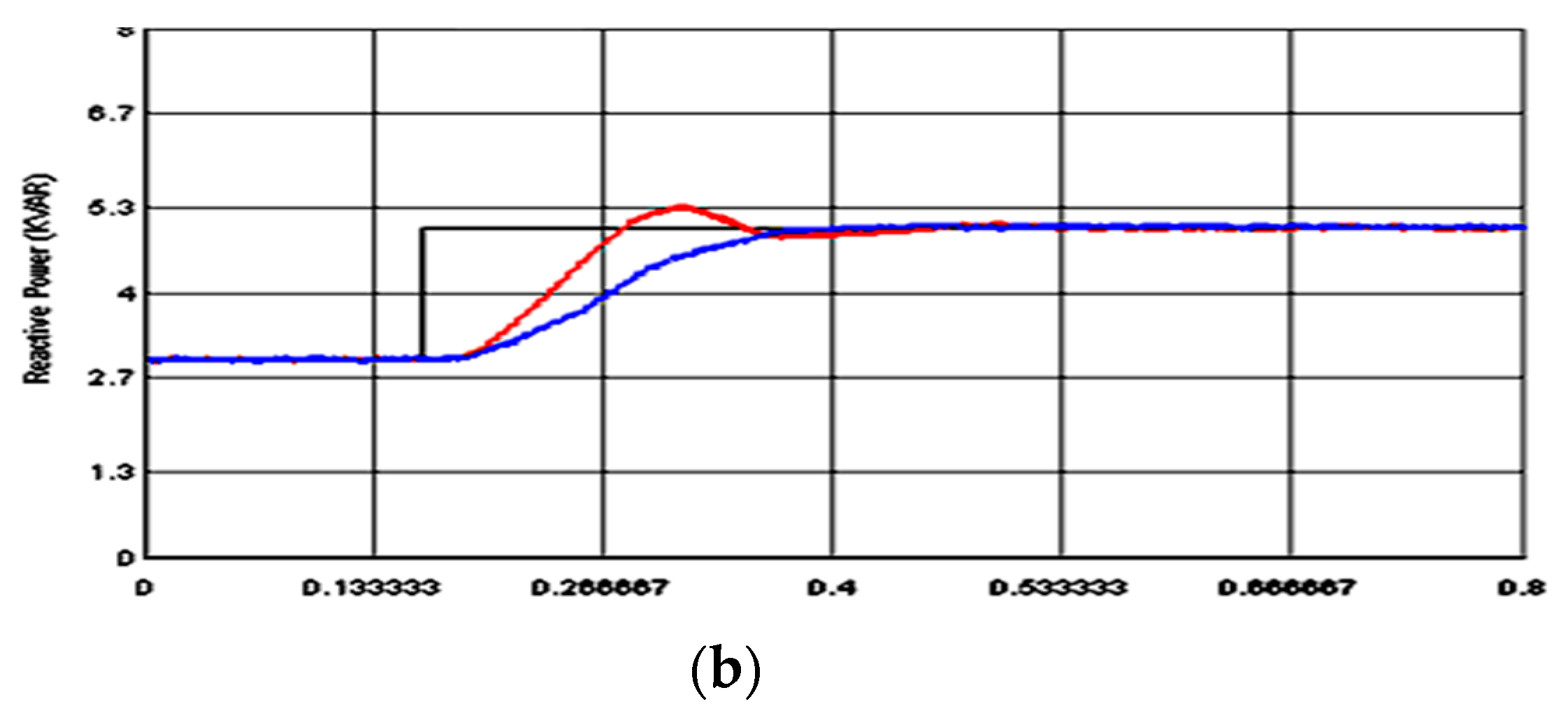
- Step change in the injected reactive power.
- Simultaneous step change in both injected real and reactive powers.
- Three-phase fault at the PCC.
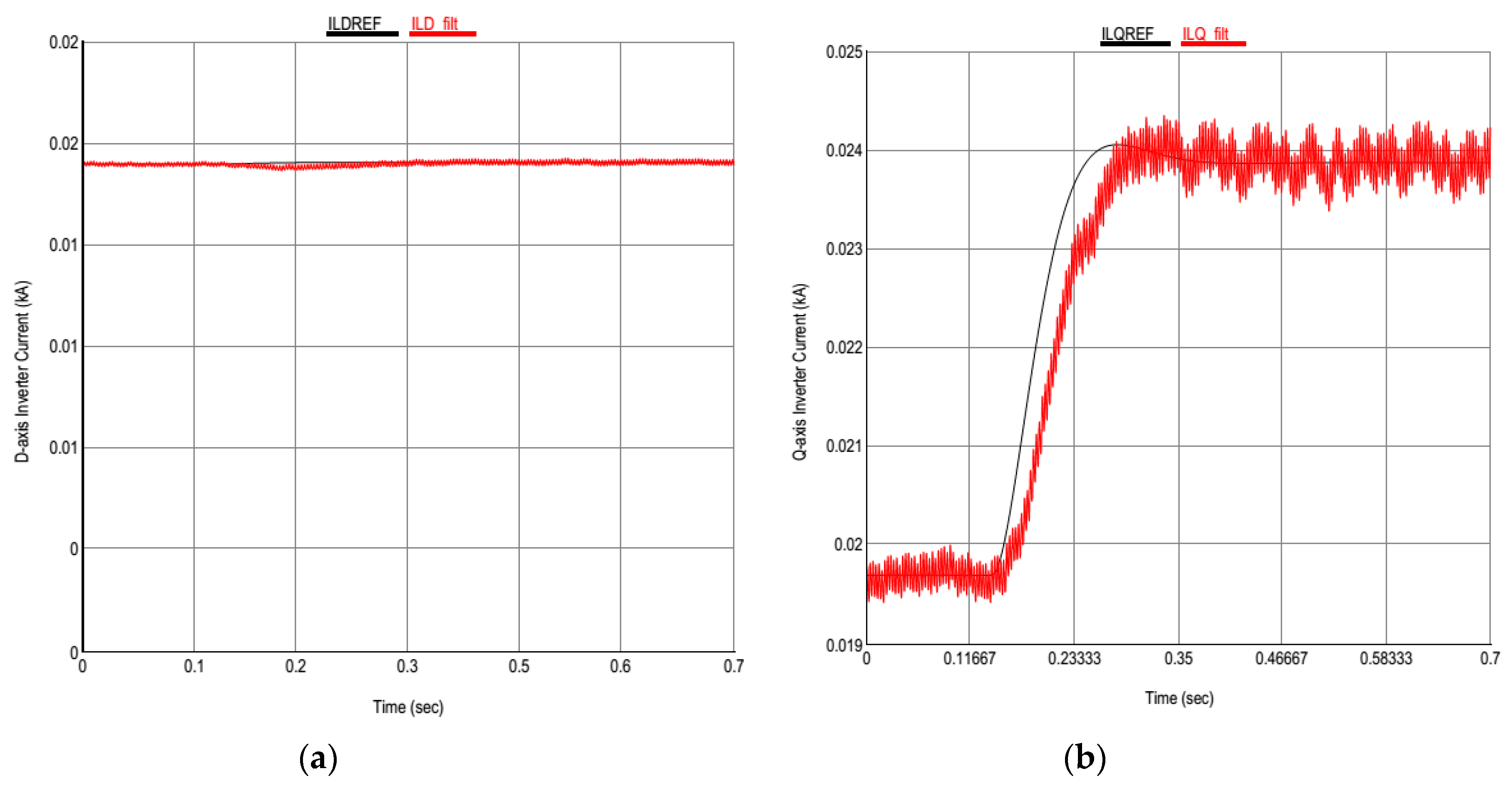
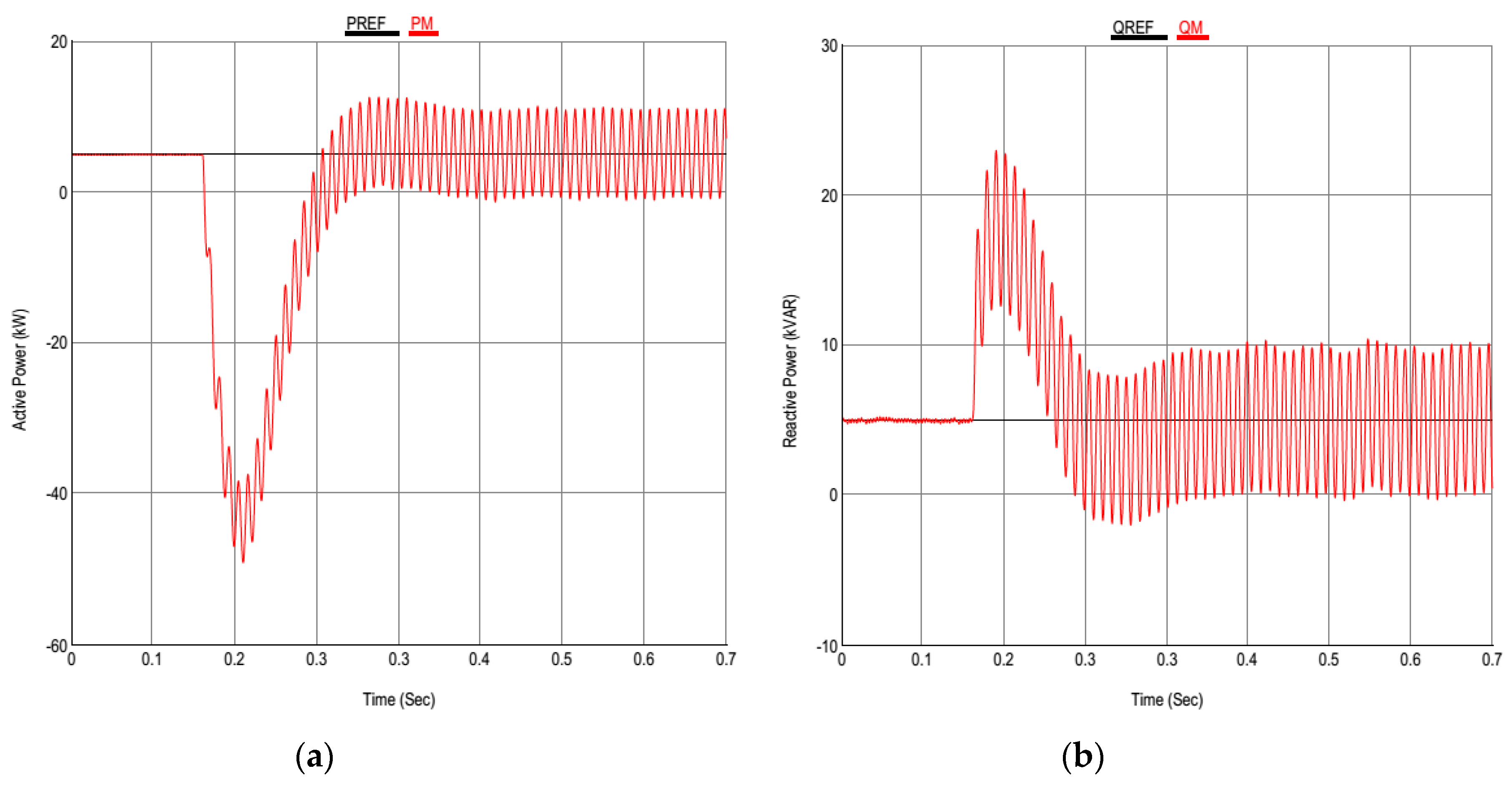
5.1. One Inverter-Based DG Case
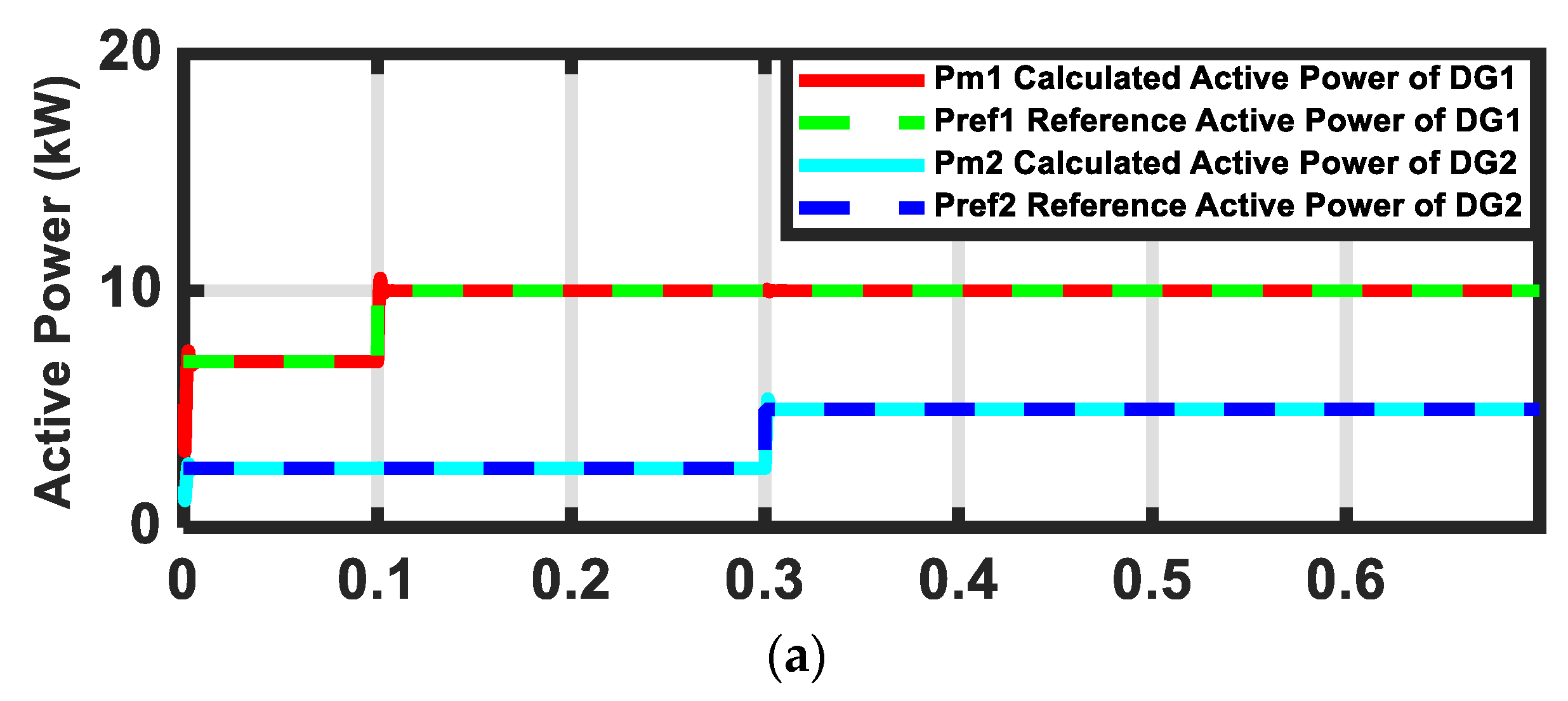
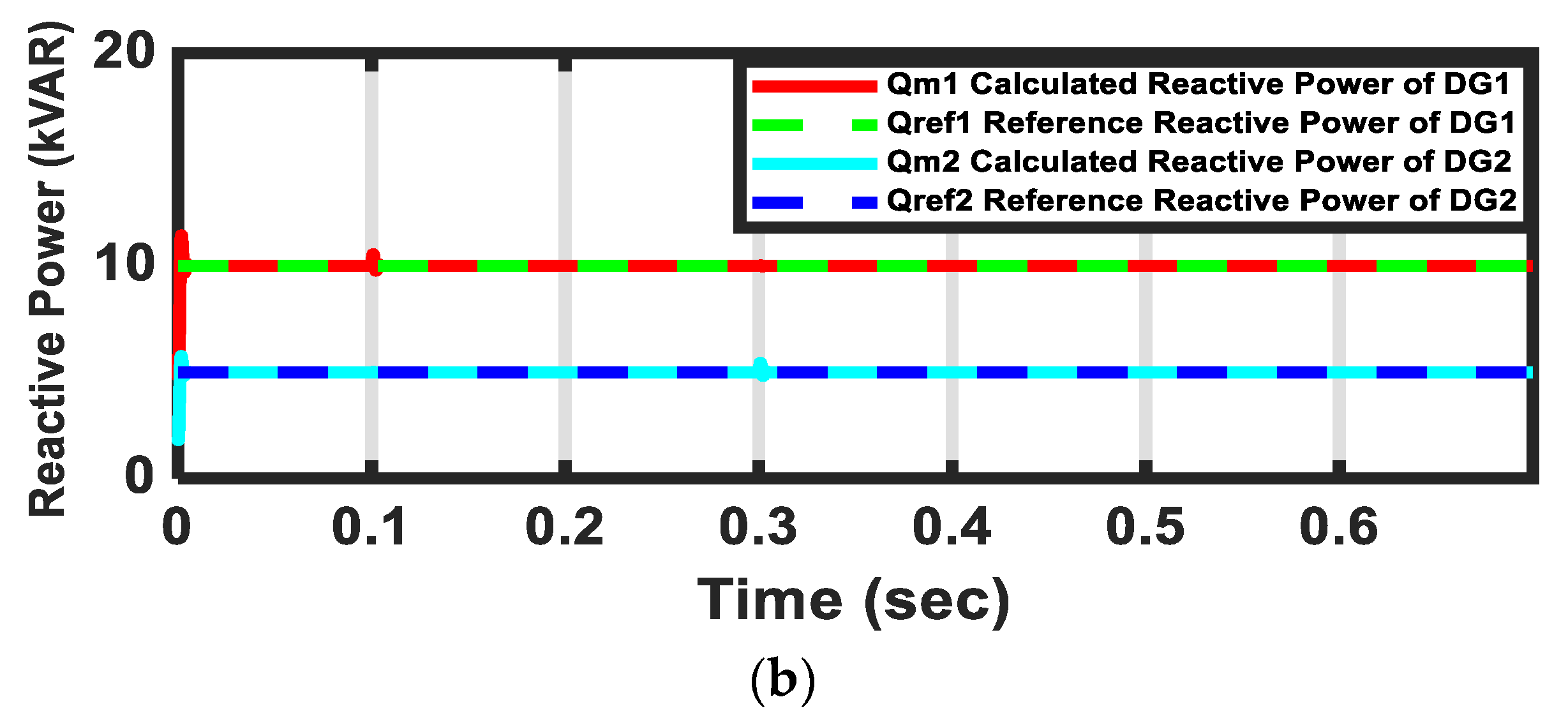
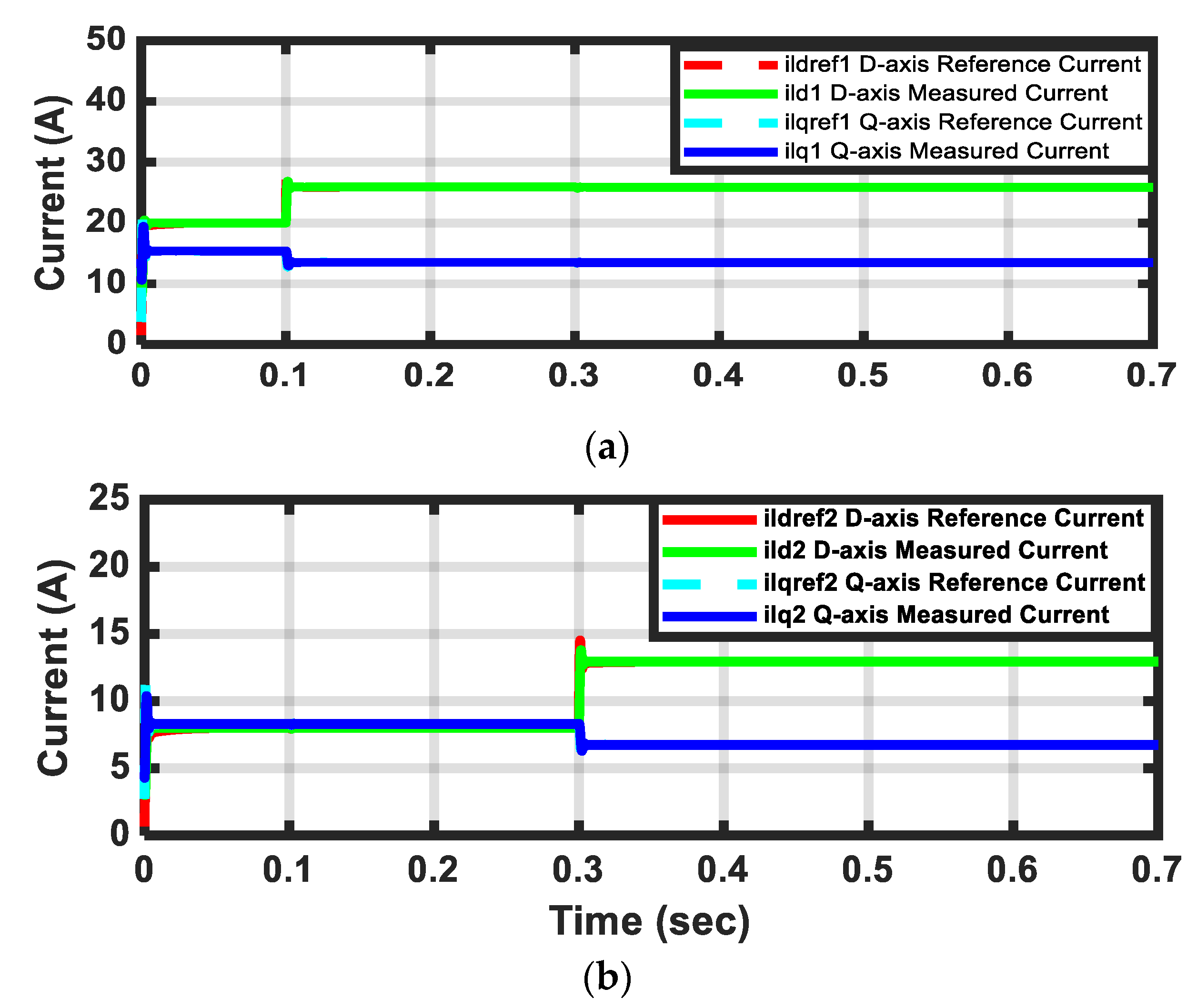
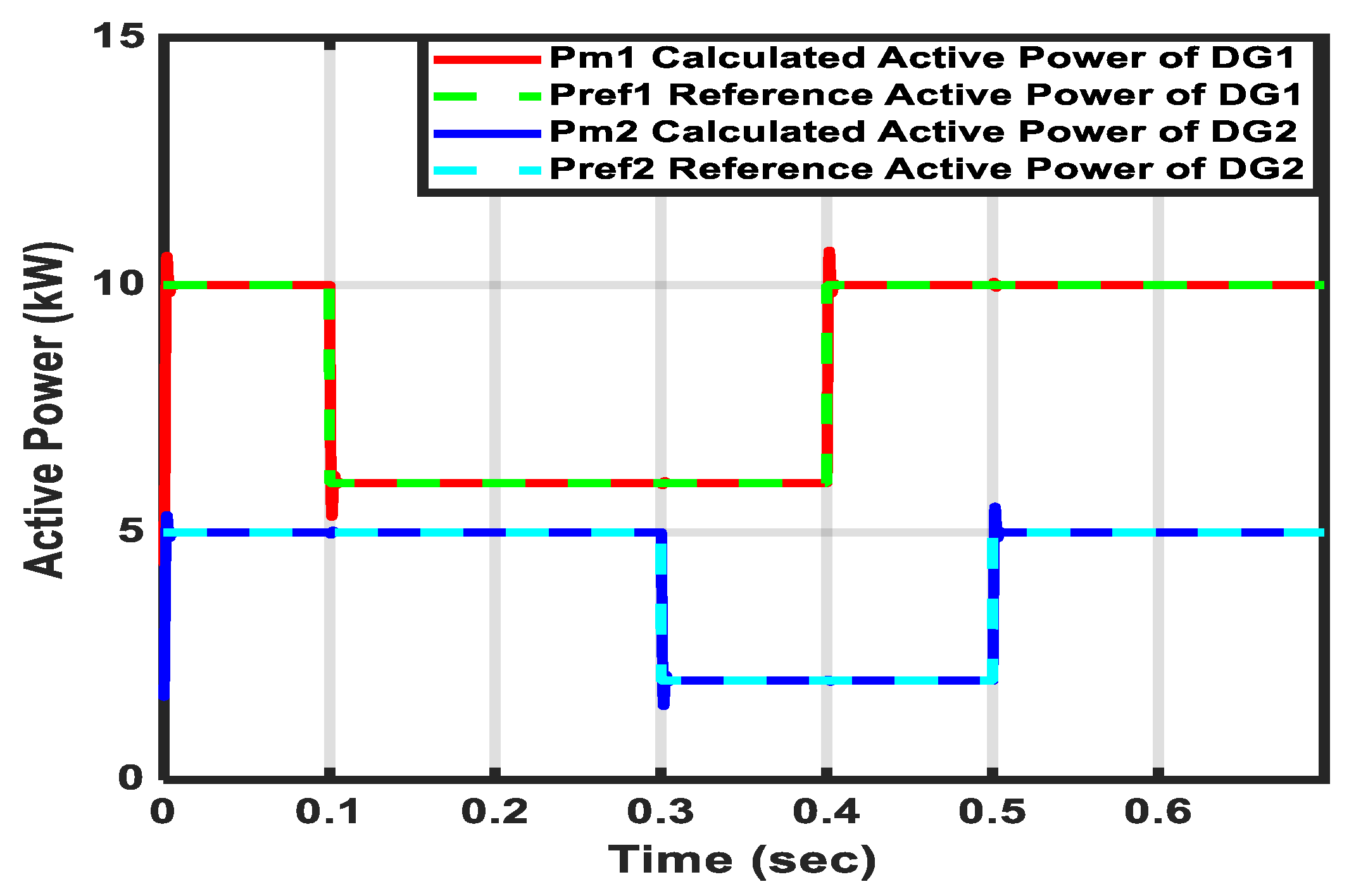
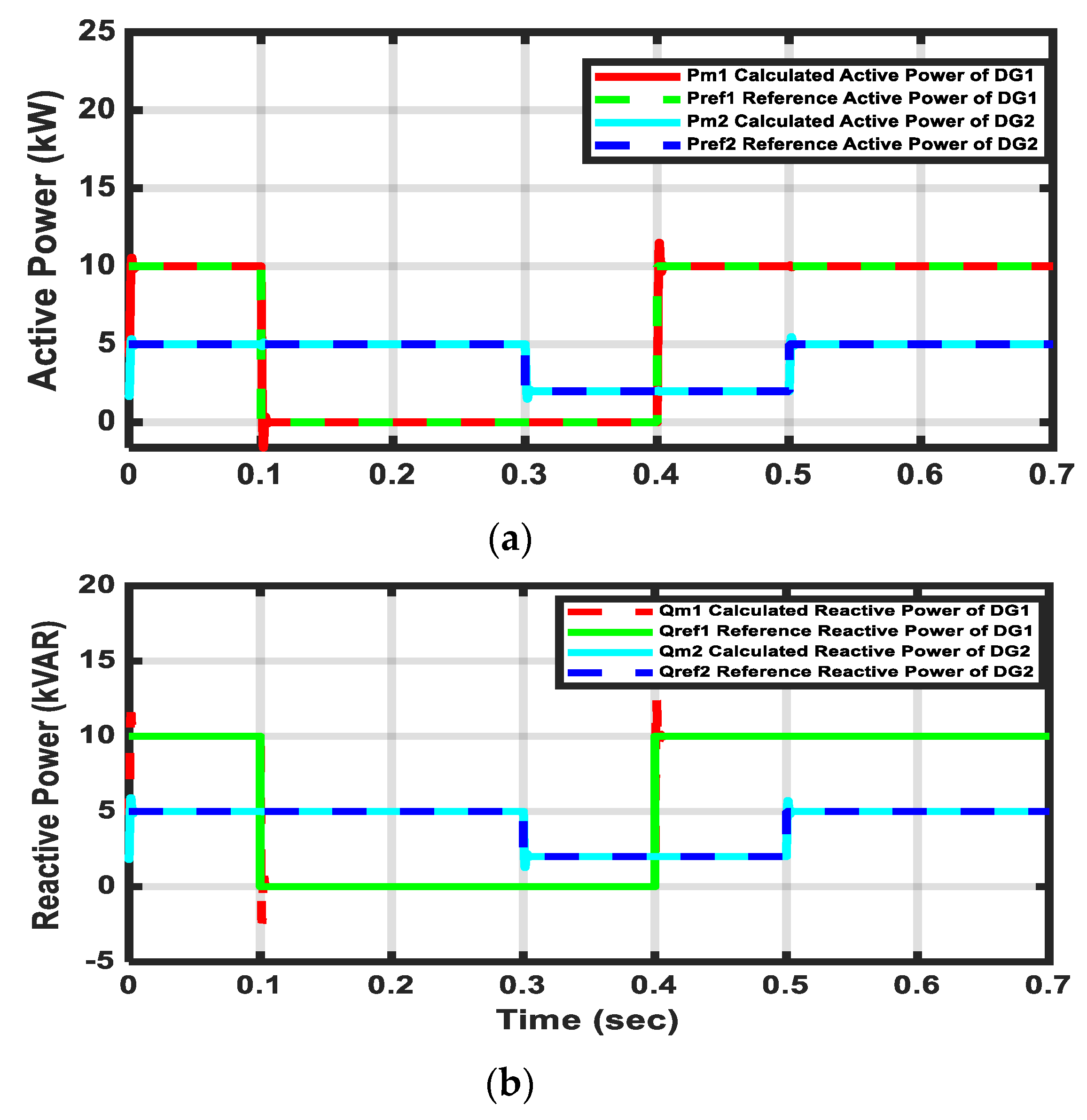
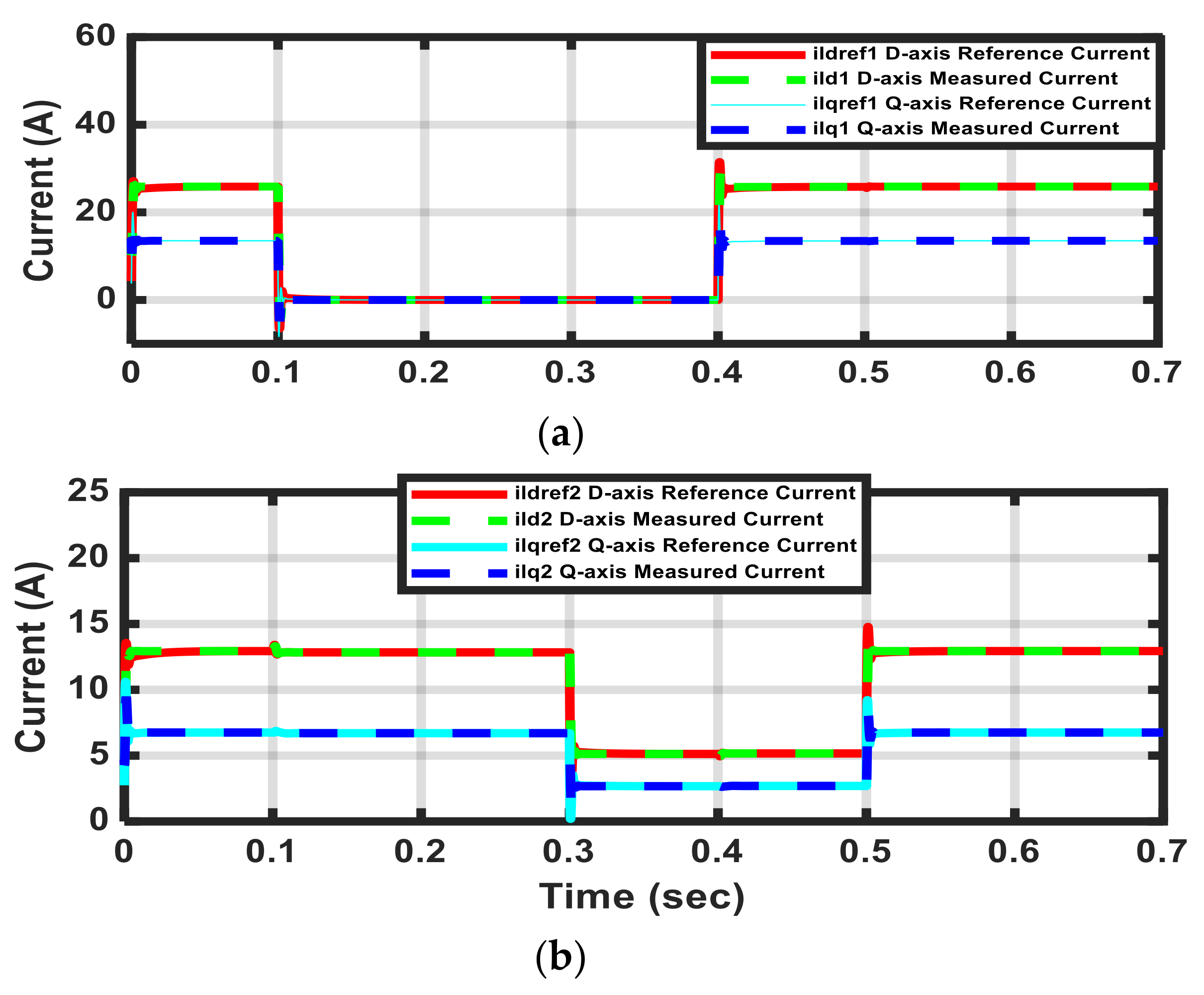
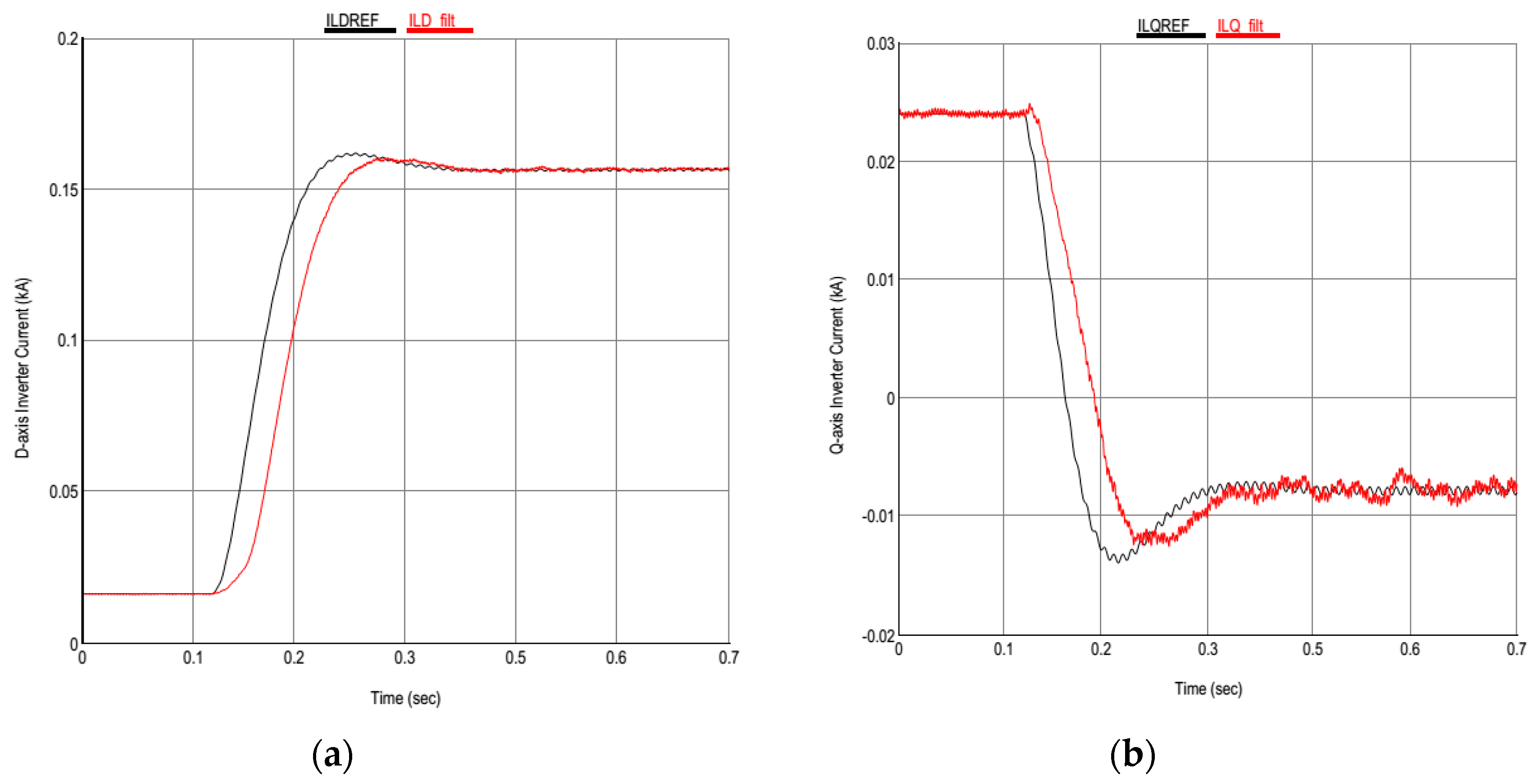
5.2. Two DGs Cases
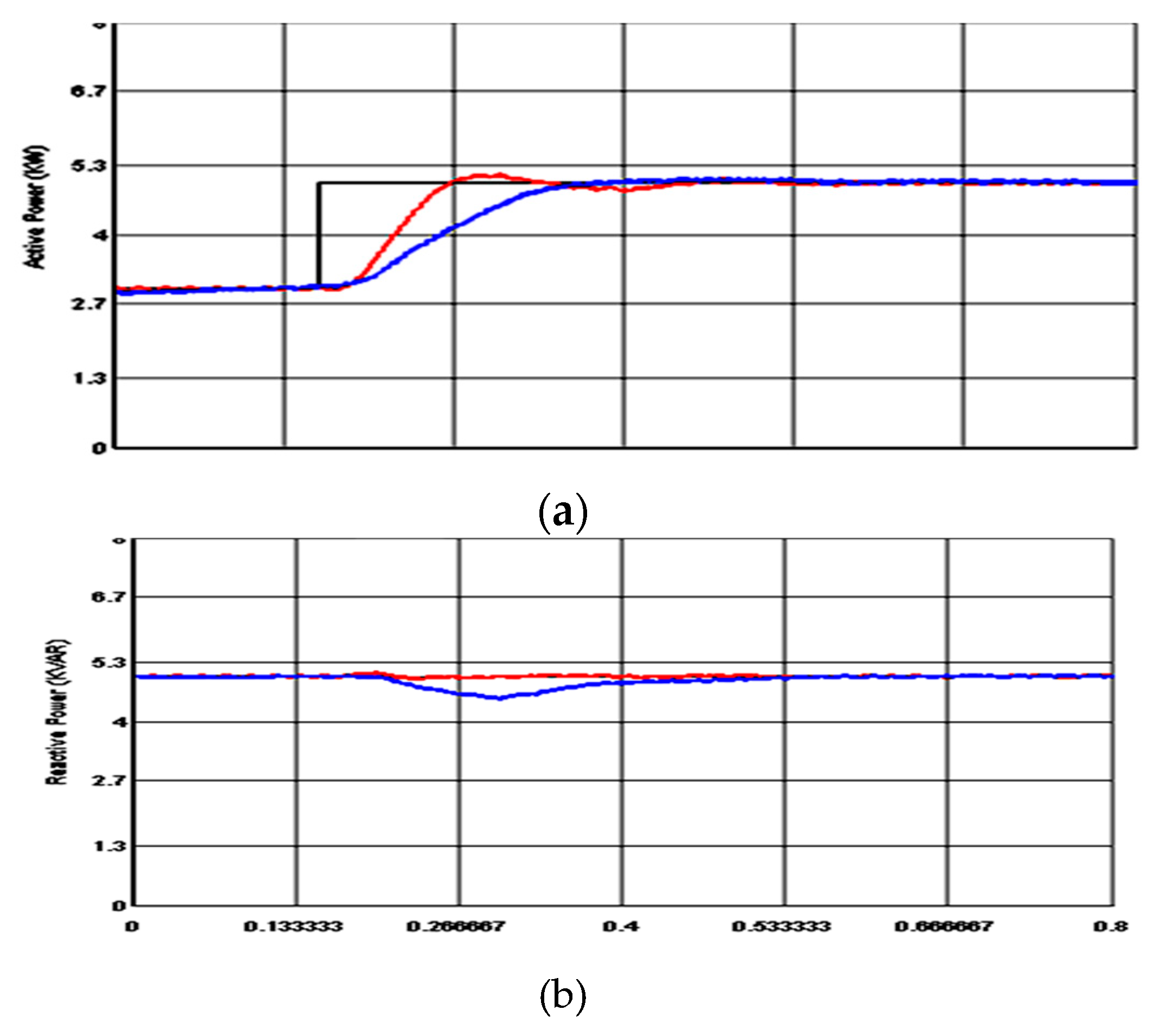
6. Real-Time Implementation
7. Conclusion
Author Contributions
Funding
Conflicts of Interest
References
- Colmenar-Santos, A.; Reino-Rio, C.; Borge-Diez, D.; Collado-Fernández, E. Distributed generation: A review of factors that can contribute most to achieve a scenario of DG units embedded in the new distribution networks. Renew. Sustain. Energy Rev. 2016, 59, 1130–1148. [Google Scholar] [CrossRef]
- Tavakoli, M.; Shokridehaki, F.; Akorede, M.F.; Marzband, M.; Vechiu, I.; Pouresmaeil, E. CVaR-based energy management scheme for optimal resilience and operational cost in commercial building microgrids. Electr. Power Energy Syst. 2018, 100, 1–9. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M. Optimal design of microgrids in autonomous and grid-connected modes using particle swarm optimization. IEEE Trans. Power Electron. 2011, 26, 755–769. [Google Scholar] [CrossRef]
- Mohammadi, F. Power Management Strategy in Multi-Terminal VSC-HVDC System. In Proceedings of the 4th National Conference on Applied Research in Electrical, Mechanical Computer and IT Engineering, Tehran, Iran, 4 October 2018. [Google Scholar]
- Mohammadi, F.; Nazri, G.A.; Saif, M. A Bidirectional Power Charging Control Strategy for Plug-in Hybrid Electric Vehicles. Sustainability 2019, 11, 4317. [Google Scholar] [CrossRef]
- Hassan, M.A.; Worku, M.Y.; Abido, M.A. Optimal design and real time implementation of autonomous microgrid including active load. Energies 2018, 11, 1109. [Google Scholar] [CrossRef]
- Danish, M.S.S.; Matayoshi, H.; Howlader, H.O.R.; Chakraborty, S.; Mandal, P.; Senjyu, T. Microgrid Planning and Design: Resilience to Sustainability. In Proceedings of the 2019 IEEE PES GTD Grand International Conference and Exposition Asia (GTD Asia), Bangkok, Thailand, 19–23 March 2019; pp. 253–258. [Google Scholar]
- Danish, M.S.S.; Senjyu, T.; Funabashi, T.; Ahmadi, M.; Ibrahimi, A.M.; Ohta, R.; Howlader, H.O.R.; Zaheb, H.; Sabory, N.R.; Sediqi, M.M. A sustainable microgrid: A sustainability and management-oriented approach. In Proceedings of the Applied Energy Symposium and Forum, Renewable Energy Integration with Mini/Microgrids; Energy Procedia: Rhodes, Greece, 2018; Volume 159, pp. 160–167. [Google Scholar]
- Sahoo, S.K.; Sinha, A.K.; Kishore, N.K. Control techniques in AC, DC, and hybrid AC–DC microgrid: A Review. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 738–759. [Google Scholar] [CrossRef]
- Xin, H.; Zhang, L.; Wang, Z.; Gan, D.; Wong, K.P. Control of island AC microgrids Using a fully distributed approach. IEEE Trans. Smart Grid 2015, 6, 943–945. [Google Scholar] [CrossRef]
- Bai, W.; Lee, K. Distributed Generation System Control Strategies in Microgrid Operation. Preprints of the 19th World Congress. The International Federation of Automatic Control, Cape Town, South Africa, 24–29 August 2014; pp. 11938–11943. [Google Scholar]
- Serban, I.; Marinescu, C. Control strategy of three-phase battery energy storage systems for frequency support in microgrids and with uninterrupted supply of local loads. IEEE Trans. Power Electron. 2014, 29, 5010–5020. [Google Scholar] [CrossRef]
- Jena, S.; Babu, C.; Mishra, G.; Naik, A. Reactive power compensation in inverter-interfaced distributed generation. In Proceedings of the 2011 International Conference on Energy, Automation, and Signal (ICEAS), Bhubaneswar, India, 28–30 December 2011; pp. 1–6. [Google Scholar]
- Hornik, T.; Zhong, Q. A Current-control strategy for voltage-source inverters in microgrids based on H∞ and repetitive control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Zhang, N.; Tang, H.; Yao, C. A systematic method for designing a PR controller and active damping of the LCL filter for single-phase grid-connected PV inverters. Energies 2014, 7, 3934–3954. [Google Scholar] [CrossRef]
- Jeong, H.; Kim, G.; Lee, K. Second-order harmonic reduction technique for photovoltaic power conditioning systems using a proportional-resonant controller. Energies 2013, 6, 79–96. [Google Scholar] [CrossRef]
- Yao, Z.; Xiao, L.; Guerrero, J. Improved control strategy for the three-phase grid-connected inverter. IET Renew. Power Gener. 2015, 9, 587–592. [Google Scholar] [CrossRef]
- Kumar, V.; Jees, S.; Gomathi, V. Control techniques for single phase inverter to interface renewable energy sources with the microgrid. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 437–447. [Google Scholar]
- Lia, S.; Jaithwaa, I.; Suftaha, R.; Fua, X. Direct-current vector control of three-phase grid-connected converter with L, LC, and LCL filters. Electr. Power Compon. Syst. 2015, 43, 1644–1655. [Google Scholar] [CrossRef]
- Schonardie, M.; Coelho, R.; Schweitzer, R.; Martins, D. Control of the active and reactive power using dq0 transformation in a three-phase grid-connected PV system. In Proceedings of the 2012 IEEE International Symposium Industrial Electronic, Hangzhou, China, 28–31 May 2012; pp. 264–269. [Google Scholar]
- Hassan, M.; Abido, M. RTDS implementation of the optimal design of the grid-connected microgrids using particle swarm optimization. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ’12), Santiago de Compostela, Spain, 28–30 March 2012. [Google Scholar]
- Dai, M.; Marwali, M.N.; Keyhani, A. Power flow control of a single distributed generation unit. IEEE Trans. Power Electron. 2008, 23, 343–352. [Google Scholar] [CrossRef]
- Jang, M.; Mihai, C.; Agelidis, V.G. A single-phase grid-connected fuel cell system based on a boost-inverter. IEEE Trans. Power Electron. 2013, 28, 279–288. [Google Scholar] [CrossRef]
- Fazeli, S.M.; Ping, H.W.; Rahim, N.B.A.; Ooi, B.T. Individual-phase decoupled PQ control of three-phase voltage source converter. IET Gener. Transm. Distrib. 2013, 7, 219–1228. [Google Scholar] [CrossRef]
- Adhikari, S.; Li, F.X.; Li, H.J. PQ and PV control of photovoltaic generators in distribution systems. IEEE Trans. Smart 2015, 6, 2929–2941. [Google Scholar] [CrossRef]
- Chen, M.; Wang, H.; Zeng, G.; Dai, Y.; Bi, D. Optimal P-Q control of grid-connected inverters in a microgrid based on adaptive population extremal optimization. Energies 2018, 11, 2107. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M. Real time implementation and optimal design of autonomous microgrids. Electr. Power Syst. Res. 2014, 109, 118–127. [Google Scholar] [CrossRef]
- Patel, R.; Li, C.; Meegahapola, L.; McGrath, B.; Yu, X. Enhancing optimal automatic generation control in a multi-area power system with diverse energy resources. IEEE Trans. Power Syst. 2019, 34, 3465–3475. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M. Optimal power sharing of an inverter–based autonomous microgrid. In Proceedings of the Conference on Renewable Energies and Power Quality (ICREPQ’13), Bilbao, Spain, 20–22 March 2013. [Google Scholar]
- Al-Saedi, W.; Lachowicz, S.W.; Habibi, D.; Bass, O. Voltage and frequency regulation-based DG unit in an autonomous microgrid operation using particle swarm optimization. Int. J. Electr. Power Energy Syst. 2013, 53, 742–751. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of phase-locked loop low-frequency stability in three-phase grid-connected power converters considering impedance interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Errami, Y.; Ouassaid, M.; Maaroufi, M. Modelling and optimal power control for permanent magnet synchronous generator wind turbine system connected to utility grid with fault conditions. World J. Model. Simul. 2015, 11, 123–135. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Worku, M.; Hassan, M.; Abido, M. Real time energy management and control of renewable energy based microgrid in grid connected and island modes. Energies 2019, 12, 276. [Google Scholar] [CrossRef]
- RTDS Technologies. Real Time Digital Simulator Power System and Control User Manual; RTDS Technologies: Winnipeg, MB, Canada, 2009. [Google Scholar]
- Mahmoud, M.; Sattar, A. Real time implementation of the grid to analyze the performance of the variable speed wind turbine−generator during grid disturbances. Int. J. Comput. Electr. Eng. 2016, 8, 104–116. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PI Power Controller Parameters | |||
| kpp(Amp/ Watt) | kip(Amp/ Joule) | kpq(Amp/ Watt) | kiq(Amp/ Joule) |
| 0.000737 | 5.03138 | 0.000737 | 5.03138 |
| PI Current Controller Parameters | |||
| kid(Volt/Current. Sec) | kpq(Volt/ Amp) | kiq(Volt/Current. Sec) | kpd(Volt/ Amp) |
| 649.54 | 8.87277 | 649.54 | 8.87277 |
| Filter Parameters | |||
| Cf (μF) | Lf (mH) | Rd (Ω) | |
| 10.4 | 2.176 | 10.6539 | |
| PI Power Controller Parameters | ||||
| kpp(Amp/ Watt) | kip(Amp/ Joule) | kpq(Amp/ Watt) | kiq(Amp/ Joule) | |
| DG1 | 0.0009 | 5.0 | 0.0009 | 5.0 |
| DG2 | 0.0008542 | 5.97056 | 0. 0008542 | 5.97056 |
| PI Current Controller Parameters | ||||
| kid (Volt/Current. Sec) | kpq(Volt/ Amp) | kiq(Volt/Current. Sec) | kpd(Volt/ Amp) | |
| DG1 | 606.375 | 10 | 606.375 | 10 |
| DG2 | 632.285 | 5.1117 | 632.285 | 5.1117 |
| Filter Parameters | ||||
| Cf(μF) | Lf(mH) | Rd(Ω) | ||
| 11.0 | 5 | 10.0 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassan, M.A.; Worku, M.Y.; Abido, M.A. Optimal Power Control of Inverter-Based Distributed Generations in Grid-Connected Microgrid. Sustainability 2019, 11, 5828. https://doi.org/10.3390/su11205828
Hassan MA, Worku MY, Abido MA. Optimal Power Control of Inverter-Based Distributed Generations in Grid-Connected Microgrid. Sustainability. 2019; 11(20):5828. https://doi.org/10.3390/su11205828
Chicago/Turabian StyleHassan, Mohamed A., Muhammed Y. Worku, and Mohamed A. Abido. 2019. "Optimal Power Control of Inverter-Based Distributed Generations in Grid-Connected Microgrid" Sustainability 11, no. 20: 5828. https://doi.org/10.3390/su11205828
APA StyleHassan, M. A., Worku, M. Y., & Abido, M. A. (2019). Optimal Power Control of Inverter-Based Distributed Generations in Grid-Connected Microgrid. Sustainability, 11(20), 5828. https://doi.org/10.3390/su11205828