Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV)



Abstract
:1. Introduction
- How is the stability of communication in IoV based on the dynamic nature enhanced?
- How is a vehicular network that is more manageable, optimized, and scalable created to have equal distribution of network load?
- How is higher performance achieved in regard to delivery ratio of packet, throughput, and end-to-end delay?
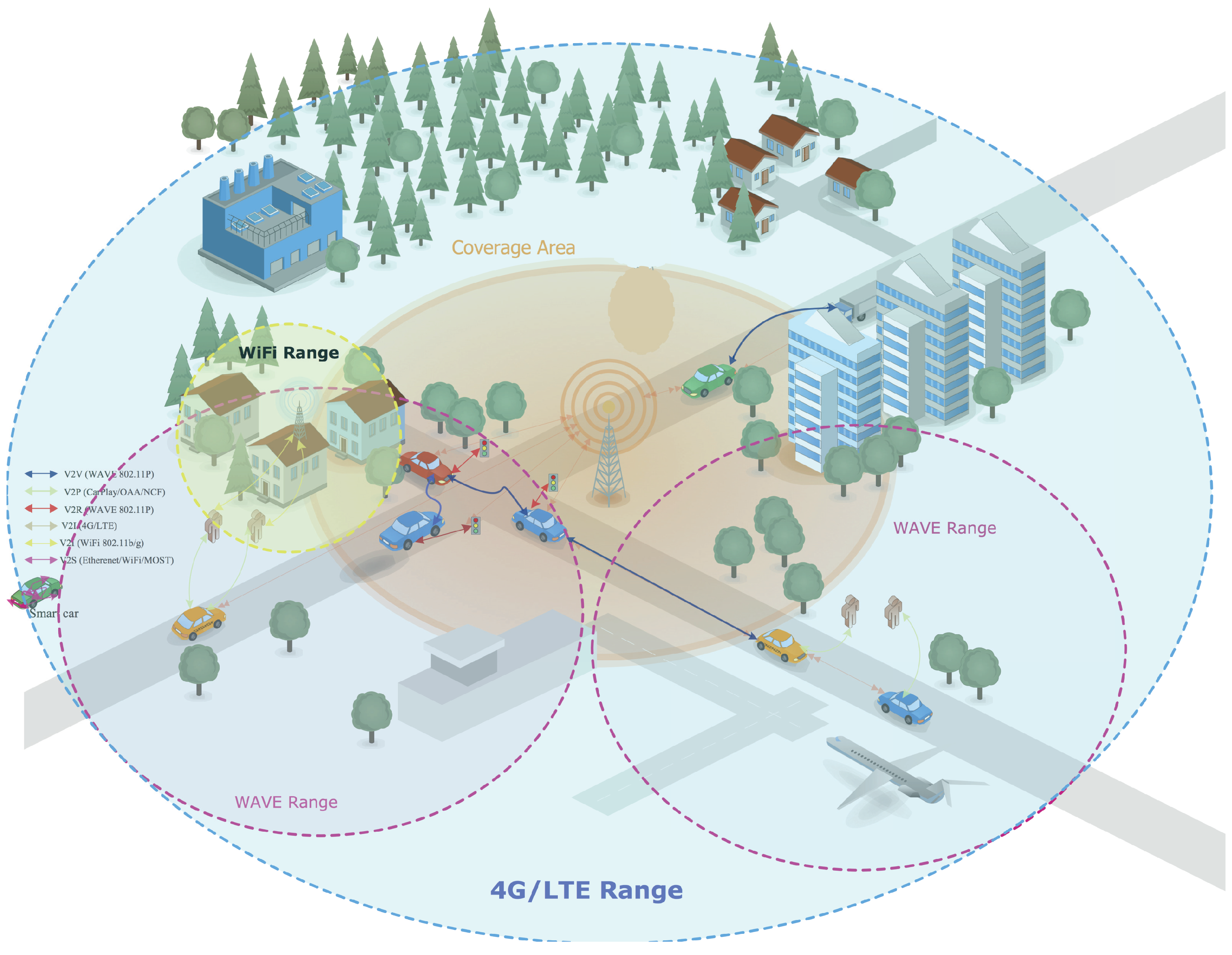
- Introduction of a realistic communication model for clustering heterogeneous network that supports V2V and V2I communication.
- Avoiding network dissemination problems, by introducing a novel metaheuristic modified ACO-based clustering algorithm “CACOIOV” to stabilize topology for cluster-based packet route optimization.
- Avoiding the local optimum problem, which is a common problem during route-finding by introducing new approaches in searching space and pheromone evaporation.
- Adapting the dynamic range of transmission in regard to density of local traffic by applying the DA-TRLD algorithm on CACOIOV, ACO, and AODV algorithms to maintain the connectivity of network.
- Contributing to Sustainable Transportation and smart cities by measuring and analyzing the performance of these three routing protocols for the IoV.
2. Related Work
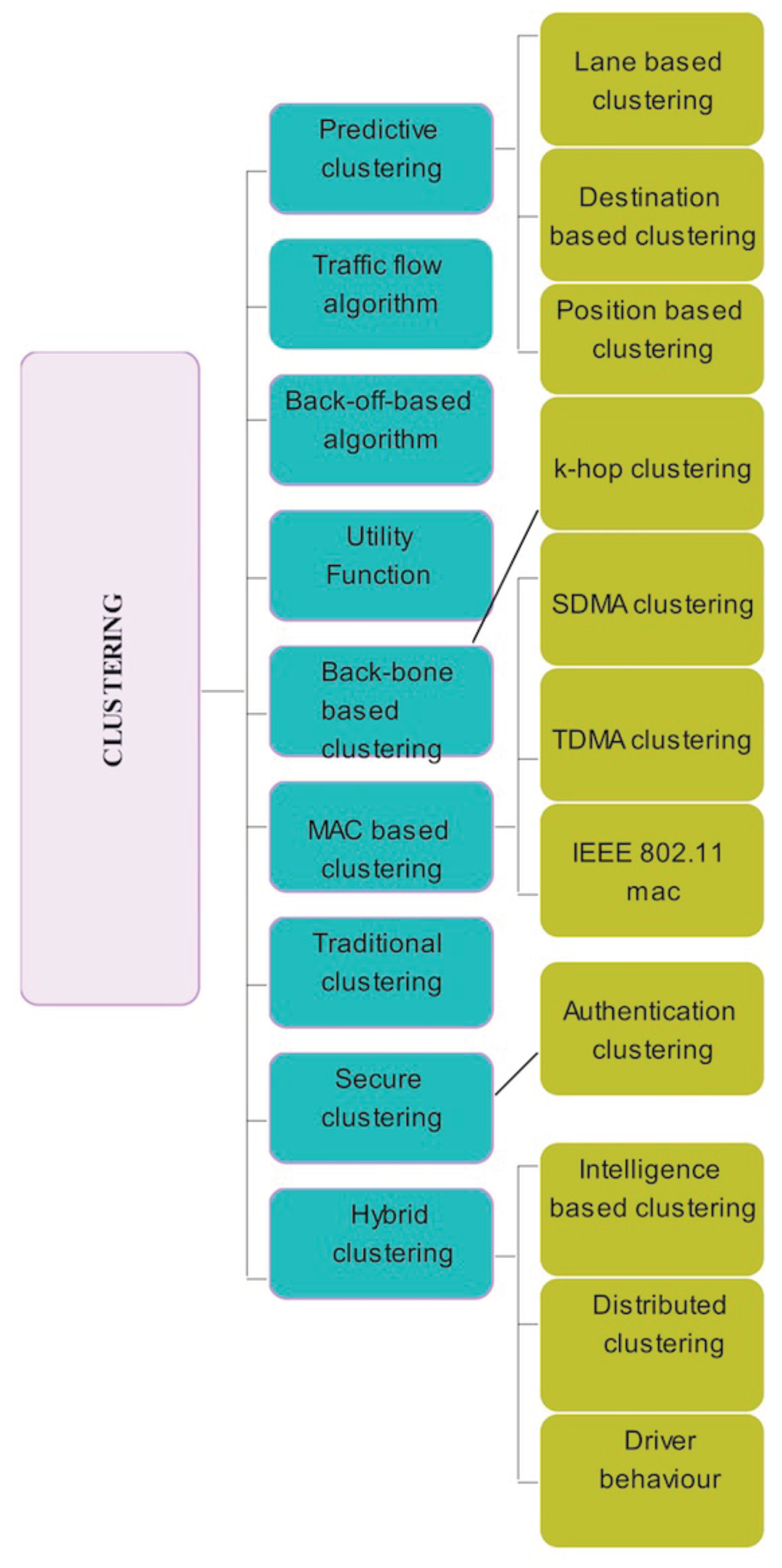
2.1. VANETs’ Clustering
2.2. Clustering in IoV
- Search can be conducted in parallel among a population.
- It can adapt to changes such as novel distances.
- It discovers good solutions rapidly.
- Convergences are guaranteed.
- There is the probability of change in each iteration.
- Difficulty in theoretical analysis and has more experimental basis than theoretical research.
- Random decisions are dependent sequences.
- Uncertain convergence time.
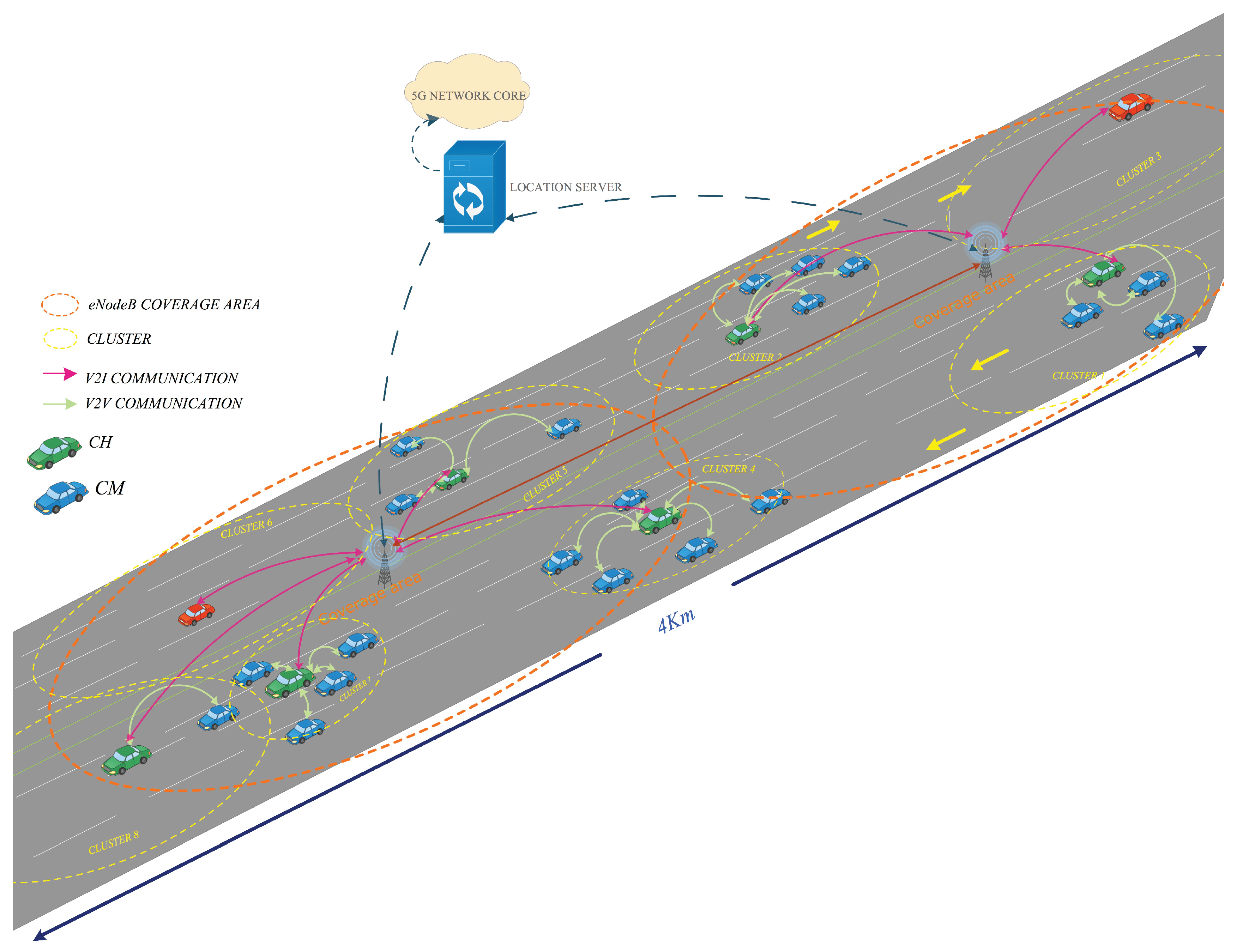
3. Proposed CACOIOV Architecture
3.1. IoV’s 5G Interface
3.2. Protocol Description of CACOIOV
- Search space modeling and Initialization
- CH selection approaches
| Algorithm 1 Proposed CACOIOV algorithm |
|
| Algorithm 2 Proposed DA-TRLD algorithm |
|
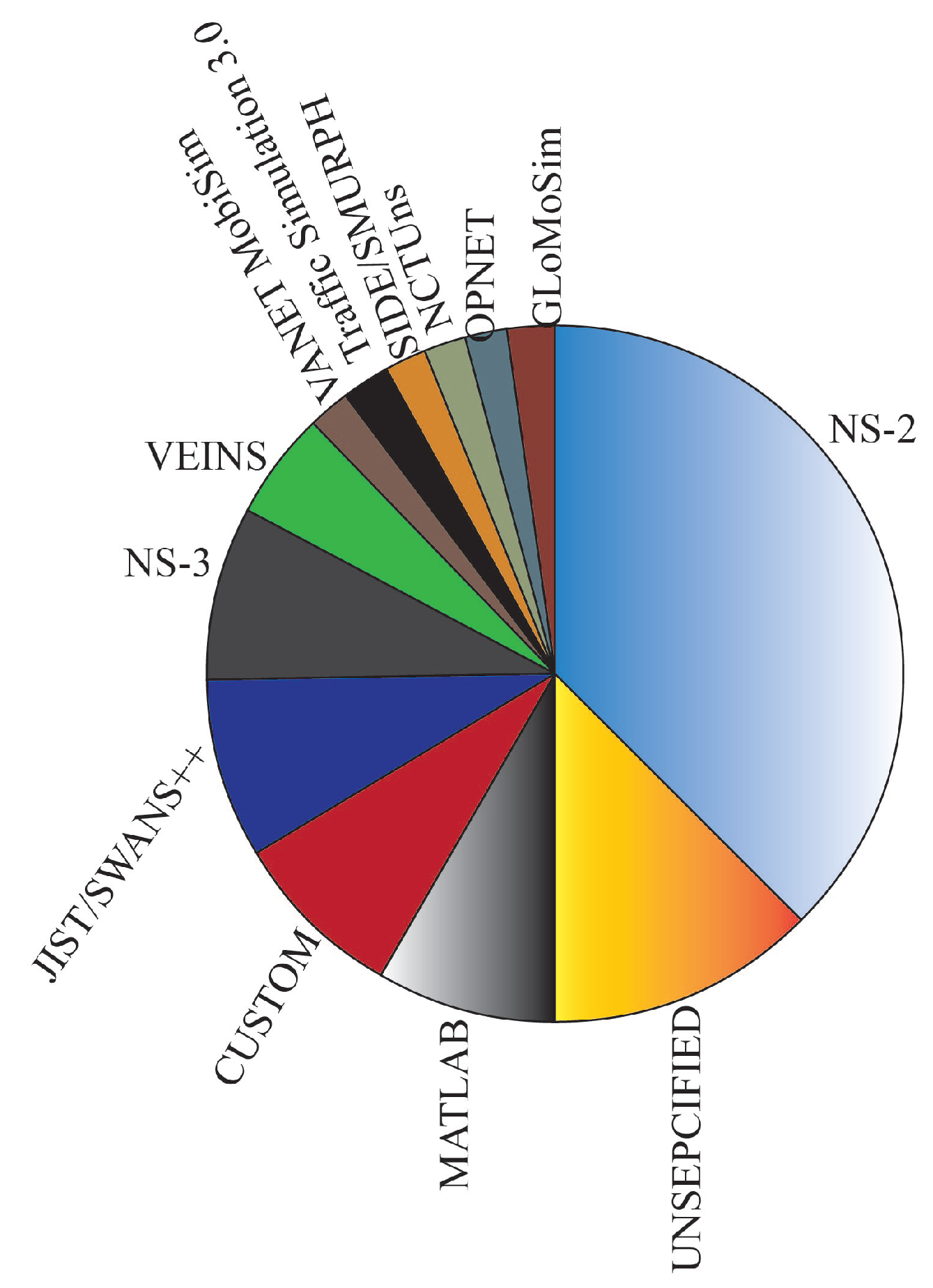
4. Channel Models and Simulator
5. Evaluation
5.1. Simulation Assumptions
5.2. Results and Simulation Analysis
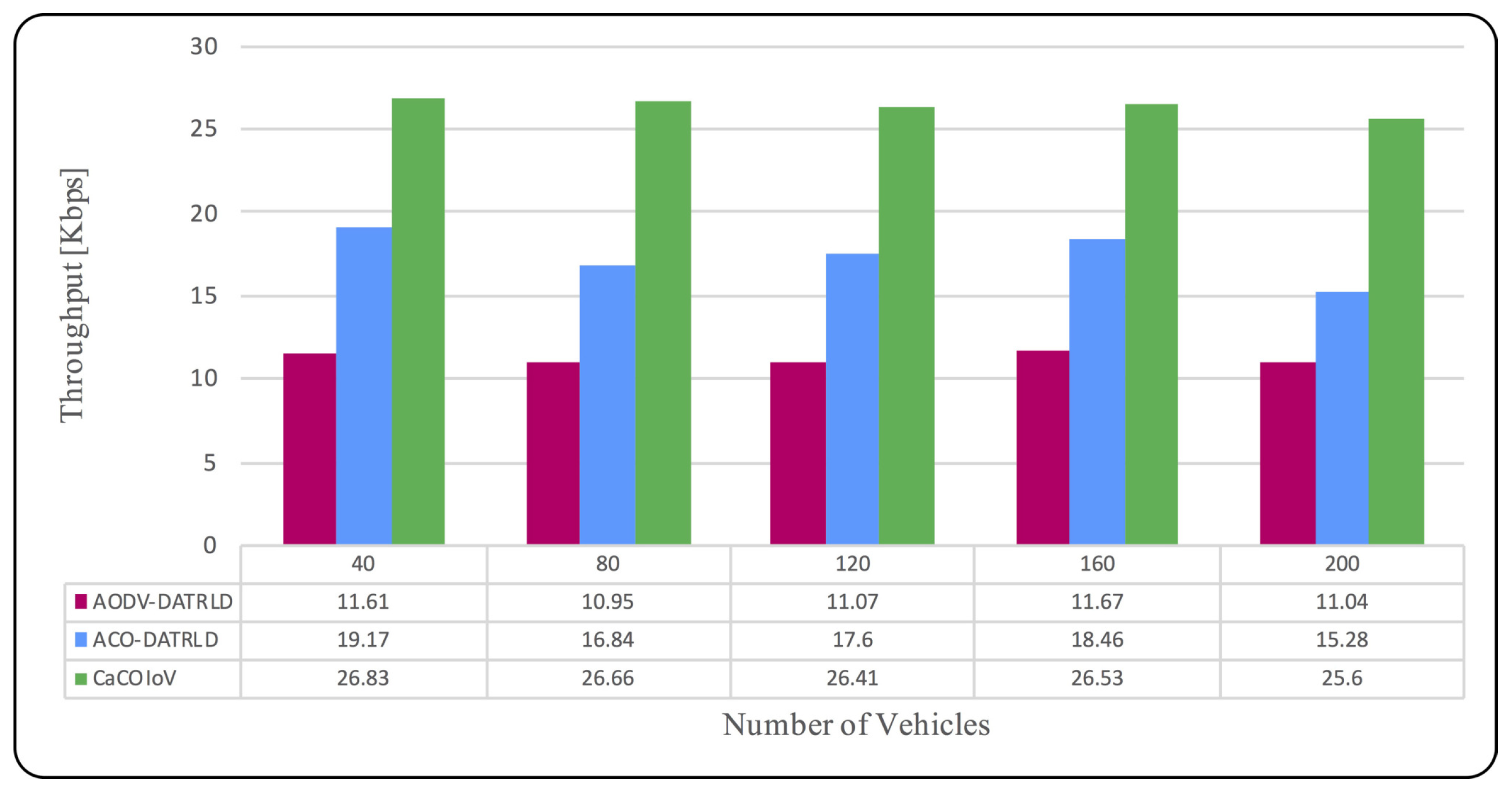
- Throughput:
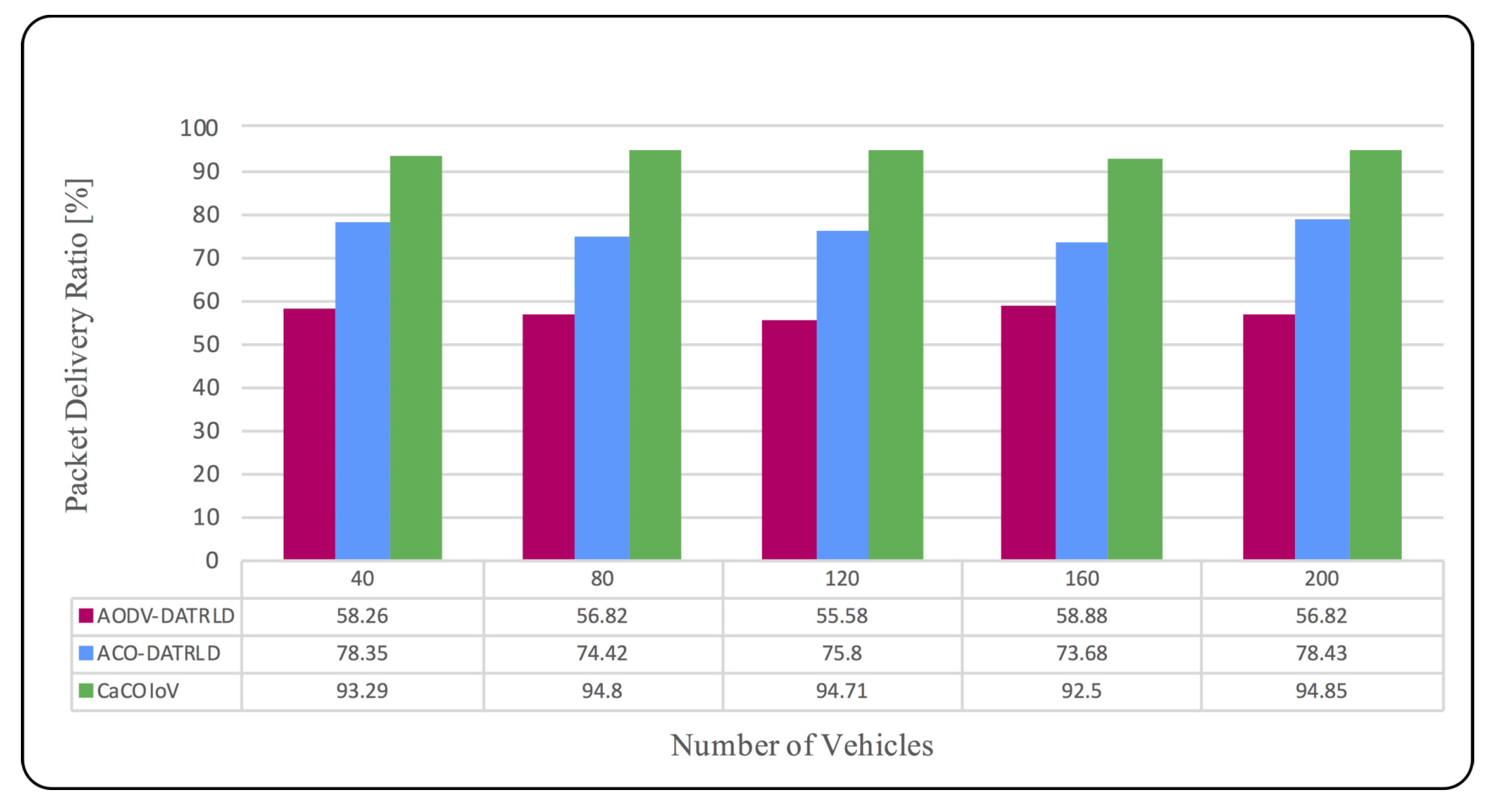
- Data Packet Delivery Ratio (DPDR):
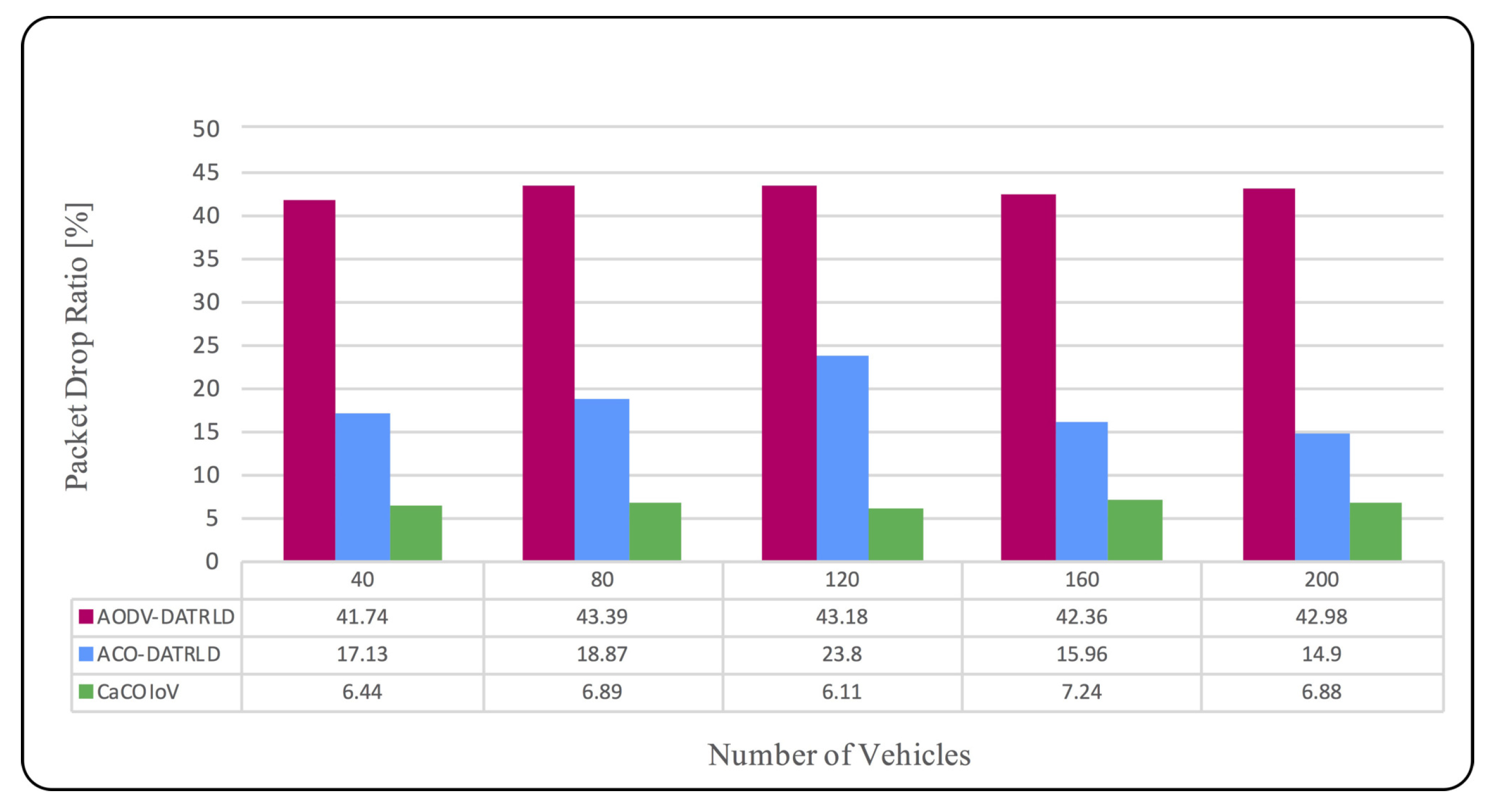
- Packet Drop Ratio:
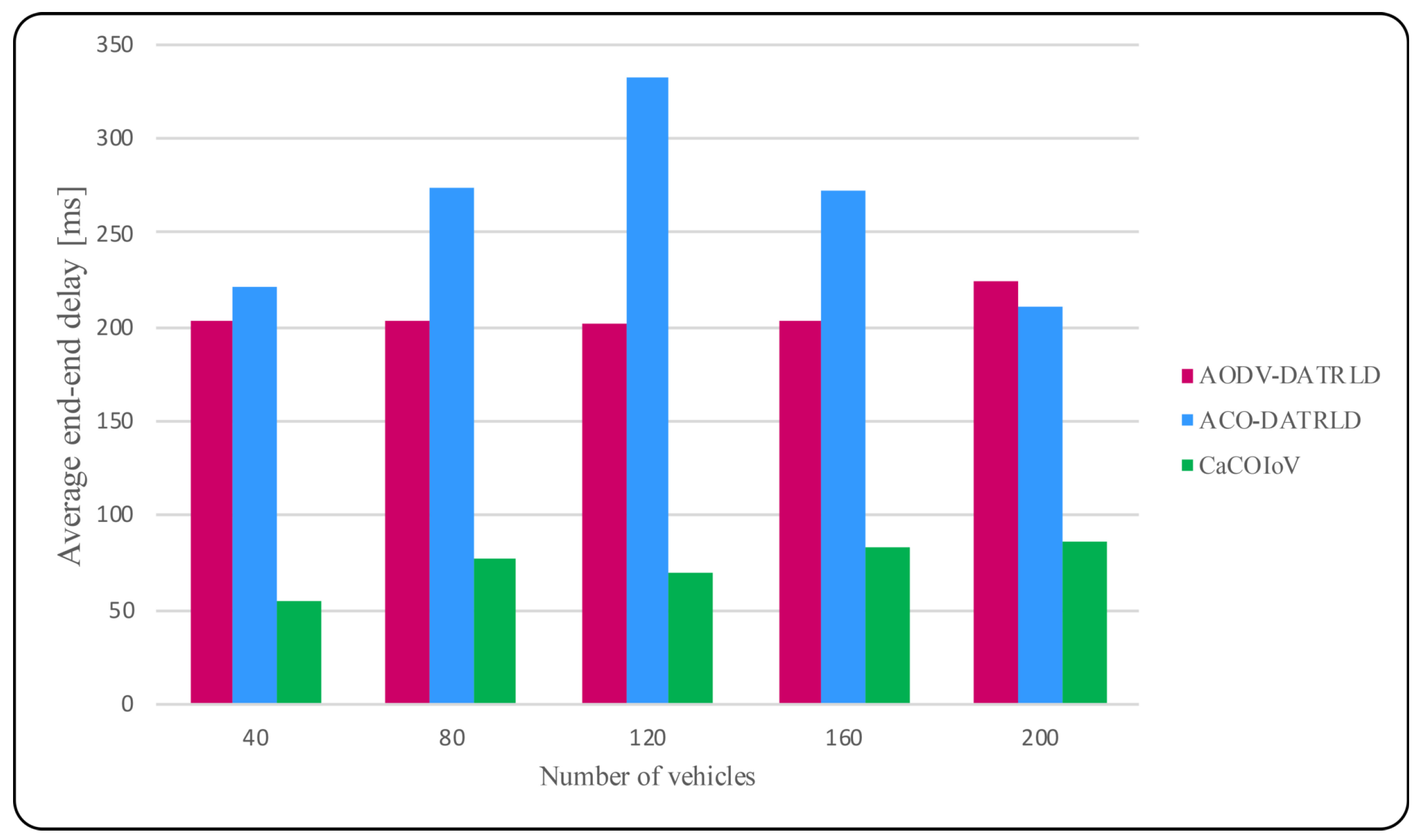
- Average End-to-End Delay:
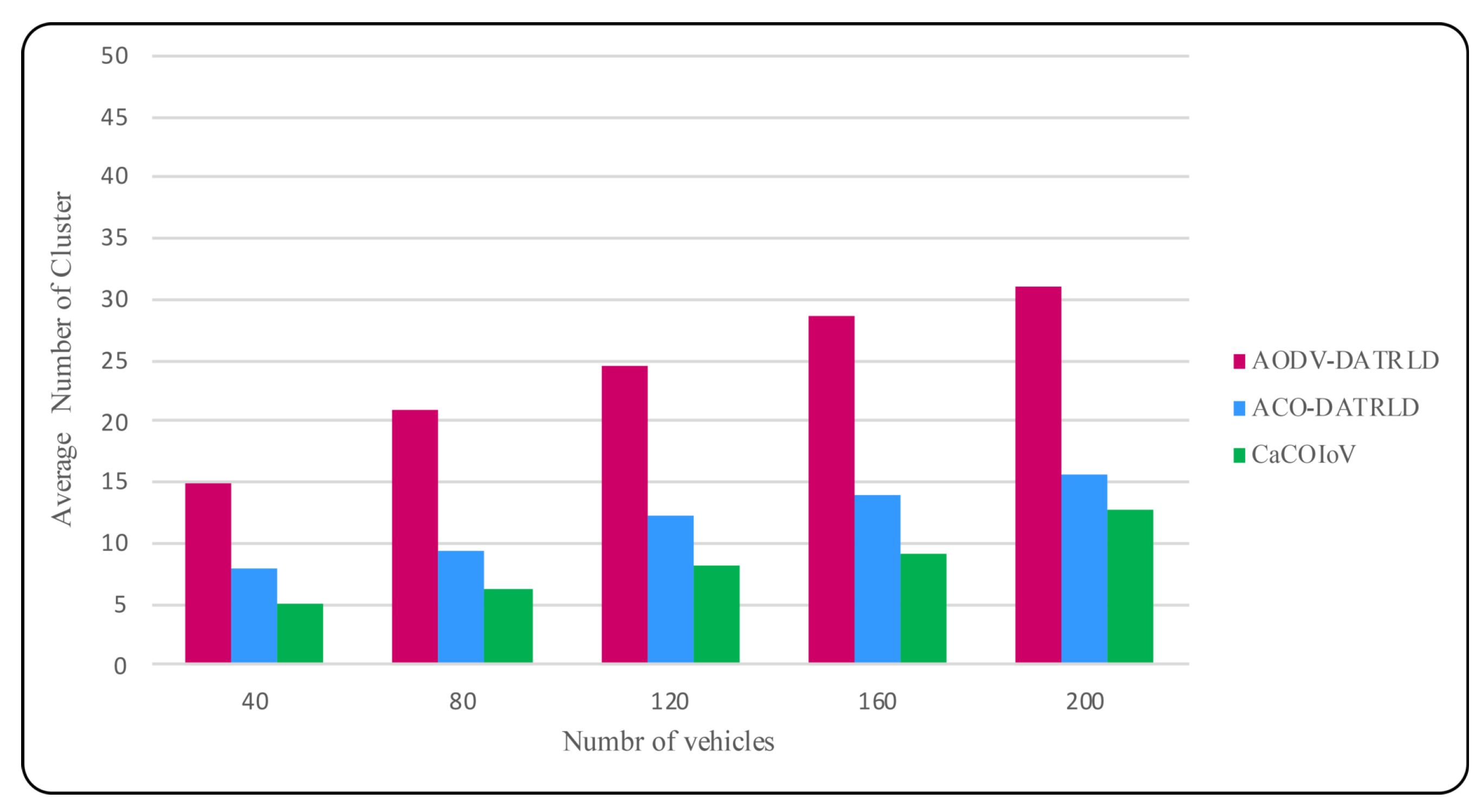
- Average Number of Cluster:
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- López, L.I.B.; Caraguay, Á.L.V.; Monge, M.A.S.; Villalba, L.J.G. Key Technologies in the Context of Future Networks: Operational and Management Requirements. Future Internet 2017, 9, 1. [Google Scholar] [CrossRef]
- Taherkhani, N.; Pierre, S. Centralized and localized data congestion control strategy for vehicular ad hoc networks using a machine learning clustering algorithm. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3275–3285. [Google Scholar] [CrossRef]
- Ucar, S.; Ergen, S.C.; Ozkasap, O. Multihop-cluster-based IEEE 802.11 p and LTE hybrid architecture for VANET safety message dissemination. IEEE Trans. Veh. Technol. 2016, 65, 2621–2636. [Google Scholar] [CrossRef]
- He, M.; Guan, Z.; Bao, L.; Zhou, Z.; Anisetti, M.; Damiani, E.; Jeon, G. Performance Analysis of a Polling-Based Access Control Combining with the Sleeping Schema in V2I VANETs for Smart Cities. Sustainability 2019, 11, 503. [Google Scholar] [CrossRef]
- Nirav, J.; Patel, R.; Jhaveri, H. Trust based approaches for secure routing in VANET: A Survey. Procedia Comput. Sci. 2015, 45, 592–601. [Google Scholar]
- Aloise, D.; Deshpande, A.; Hansen, P.; Popat, P. NP-hardness of Euclidean sum-of-squares clustering. Mach. Learn. 2009, 75, 245–248. [Google Scholar] [CrossRef] [Green Version]
- Sahoo, A.; Swain, S.K.; Pattanayak, B.K.; Mohanty, M.N. An optimized cluster based routing technique in VANET for next generation network. Inf. Syst. Des. Intell. Appl. 2016, 433, 667–675. [Google Scholar]
- Aadil, F.; Bajwa, K.B.; Khan, S.; Chaudary, N.M.; Akram, A. CACONET: Ant colony optimization (ACO) based clustering algorithm for VANET. PLoS ONE 2016, 11, e0154080. [Google Scholar] [CrossRef]
- Fahad, M.; Aadil, F.; Rehman, Z.U.; Khan, S.; Shah, P.A.; Muhammad, K.; Lloret, J.; Wang, H.; Lee, J.W.; Mehmood, I. Grey wolf optimization based clustering algorithm for vehicular ad-hoc networks. Comput. Electr. Eng. 2018. [Google Scholar] [CrossRef]
- Hernafi, Y.; Ahmed, M.B.; Bouhorma, M. ACO and PSO algorithms for developing a new communication model for VANET applications in smart cities. Wirel. Pers. Commun. 2017, 96, 2039–2075. [Google Scholar] [CrossRef]
- Aadil, F.; Ahsan, W.; Rehman, Z.U.; Shah, P.A.; Rho, S.; Mehmood, I. Clustering algorithm for internet of vehicles (IoV) based on dragonfly optimizer (CAVDO). J. Supercomput. 2018, 74, 4542–4567. [Google Scholar] [CrossRef]
- Kafsi, M.; Papadimitratos, P.; Dousse, D.; Alpcan, T.; Hubaux, J.P. VANET Connectivity Analysis. arXiv 2009, arXiv:0912.5527. [Google Scholar]
- Foteini, K. Algorithms for Stable Clustering in VANETs (Vehicular Ad Hoc Networks). Master’s Thesis, University of Thessaly, Volos, Greece, 2013. [Google Scholar]
- Gerla, M.; Tsai, J.T.C. Multicluster, mobile, multimedia radio network. Wirel. Netw. 1995, 1, 255–265. [Google Scholar] [CrossRef]
- Fathian, M.; Jafarian-Moghaddam, A.R.; Yaghini, M. Improving Vehicular Ad-Hoc Network Stability Using Meta-Heuristic Algorithms. Int. J. Automot. Eng. 2014, 4, 891–901. [Google Scholar]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed Optimization by Ant Colonies. In Proceedings of the European Conference on Artificial Life (ECAL91), Paris, France, 11–13 December 1991; pp. 134–142. [Google Scholar]
- Deneubourg, J.L.; Aron, S.; Goss, S.; Pasteels, J.M. The self-organizing exploratory pattern of the Argentine ant. J. Insect Behav. 1990, 3, 159–168. [Google Scholar] [CrossRef]
- Tsai, C.F.; Wu, H.C.; Tsai, C.W. A new clustering approach for data mining in large databases. In Proceedings of the International Symposium on Parallel Architectures, Algorithms and Networks (ISPAN’02), Makati City, Philippines, 22–24 May 2002; pp. 1087–4089. [Google Scholar]
- Yang, X.B.; Sun, J.G.; Huang, D. A new clustering method based on ant colony algorithm. In Proceedings of the 4th World Congress on Intelligent Control and Automation, Shanghai, China, 10–14 June 2002; pp. 2222–2226. [Google Scholar]
- Kuo, R.J.; Shih, C.W. Association rule mining through the ant colony system for National Health Insurance Research Database in Taiwan. Comput. Math. Appl. 2007, 54, 1303–1318. [Google Scholar] [CrossRef] [Green Version]
- Kuo, R.J.; Wang, H.S.; Hu, T.L.; Chou, S.H. Application of Ant K-Means on Clustering Analysis. Comput. Math. Appl. 2005, 50, 1709–1724. [Google Scholar] [CrossRef]
- Kuo, R.J.; Lin, S.Y.; Shih, C.W. Mining association rules through integration of clustering analysis and ant colony system for health insurance database in Taiwan. Expert Syst. Appl. 2007, 33, 794–808. [Google Scholar] [CrossRef]
- Sahoo, R.R.; Panda, R.; Behera, D.K.; Naskar, M.K. A trust based clustering with Ant Colony Routing in VANET. In Proceedings of the Third International Conference on Computing Communication and Networking Technologies (ICCCNT), Karur, India, 26–28 July 2012; Volume 1, pp. 26–28. [Google Scholar]
- Balaji, S.; Sureshkumar, S.; Saravanan, G. Cluster Based Ant Colony Optimization Routing for Vehicular Ad Hoc Networks. Int. J. Sci. Eng. Res. 2013, 4, 26–30. [Google Scholar]
- Mayank, B.; Shabnam, S.; Ashish, K.; Aditya, P. Nature inspired route optimization in vehicular adhoc network. In Proceedings of the 5th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 7–9 September 2016; pp. 447–451. [Google Scholar]
- Seyedali, M. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar]
- Rajesh, K.; Sahil, C. Efficient Routing in Vehicular Ad-hoc Networks Using Firefly Optimization. Int. Conf. Invent. Comput. Technol. (ICICT) 2016, 3, 1–6. [Google Scholar]
- Khorsid, M.; Kassem, S.; Korayem, S.L. Using Grey Wolf Algorithm to Solve the Capacitated Vehicle Routing Problem. IOP Conf. Ser. Mater. Sci. Eng. 2015, 83, 1–10. [Google Scholar]
- Komal, M.; Bajaj, P.R.; Malik, L.G. Fuzzy Bacterial Foraging Optimization Zone Based Routing (FBFOZBR) protocol for VANET. In Proceedings of the International Conference on ICT in Business Industry and Government (ICTBIG), Indore, India, 18–19 November 2016; pp. 1–10. [Google Scholar]
- Hafeez, K.A.; Zhao, L.; Mark, J.W.; Shen, X.; Niu, Z. Distributed multichannel and mobility-aware cluster-based MAC protocol for vehicular ad hoc networks. IEEE Trans. Veh. Technol. 2013, 62, 3886–3902. [Google Scholar] [CrossRef]
- Dharanyadevi, P.; Venkatalakshmi, K. Proficient routing by adroit algorithm in 5G-Cloud-Vmesh network. EURASIP J. Wirel. Commun. Netw. 2016, 89. [Google Scholar] [CrossRef]
- Mumtaz, S.; Huq, K.M.S.; Ashraf, M.I.; Rodriguez, J.; Monteiro, V.; Politis, C. Cognitive vehicular communication for 5G. IEEE Commun. Mag. 2015, 53, 109–117. [Google Scholar] [CrossRef]
- Liu, J.; Wan, J.; Jia, D.; Zeng, B.; Li, D.; Hsu, C.H.; Chen, H. High-efficiency urban traffic management in context-aware computing and 5G communication. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Chowdhary, N.; Kaur, P.D. Dynamic route optimization using nature-inspired algorithms in IoV. In Proceedings of the First International Conference on Smart System, Innovations and Computing, Jaipur, India, 15–16 April 2017; pp. 495–504. [Google Scholar]
- Jacobson, V.; Smetters, D.K.; Thornton, J.D.; Plass, M.F.; Briggs, N.H.; Braynard, R.L. Networking named content. In Proceedings of the 5th International Conference on Emerging Networking Experiments and Technologies, Rome, Italy, 1–4 December 2009; pp. 1–12. [Google Scholar]
- Li, Z.; Chen, Y.; Liu, D.; Li, X. Performance analysis for an enhanced architecture of IoV via contentcentric networking. EURASIP J. Wirel. Commun. Netw. 2017, 124. [Google Scholar] [CrossRef]
- Hofmeyr, S.A.; Forrest, S. Architecture for an artificial immune system. Evol. Comput. 2000, 8, 443–473. [Google Scholar] [CrossRef]
- Gupta, A.; Kumar, P.; Sahoo, R.; Sahu, A.; Sarangi, S. Performance measurement of plate fin heat exchanger by exploration: ANN, ANFIS, GA, and SA. J. Comput. Des. Eng. 2017, 4, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Gravel, M.; Price, W.L.; Gagné, C. Scheduling continuous casting of aluminum using a multiple objective ant colony optimization metaheuristic. Eur. J. Oper. Res. 2002, 143, 218–229. [Google Scholar] [CrossRef]
- Dorigo, M.; Stutzle, T. Ant Colony Optimization; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Cunha, F.; Villas, L.; Boukerche, A.; Maia, G.; Viana, A.; Mini, R.A.; Loureiro, A.A. Data communication in VANETs: Protocols. Appl. Chall. Ad Hoc Netw. 2016, 44, 90–103. [Google Scholar] [CrossRef]
- Yang, C.; Li, J.; Guizani, M.; Anpalagan, A.; Elkashlan, M. Advanced spectrum sharing in 5G cognitive heterogeneous networks. IEEE Wirel. Commun. 2016, 23, 94–101. [Google Scholar] [CrossRef]
- Artimy, M. Local Density Estimation and Dynamic Transmission-Range Assignment in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2007, 8, 400–412. [Google Scholar] [CrossRef]
- Artimy, M.M.; Robertson, W.; Phillips, W.J. Assignment of Dynamic Transmission Range Based on Estimation of Vehicle Density. Veh. Ad Hoc Netw. 2005. [Google Scholar] [CrossRef]
- Darwish, T.; Abu Bakar, K. Traffic density estimation in vehicular ad hoc networks: A review. Ad Hoc Netw. 2015, 24 Pt A, 337–351. [Google Scholar] [CrossRef]
- Ping, D.; Yong, A.I. Research on an Improved Ant Colony Optimization Algorithm and its Application. Int. J. Hybrid Inf. Technol. 2016, 9, 223–234. [Google Scholar]
- The Network Simulator NS-2. 2014. Available online: http://www.isi.edu/nsnam/ns/ (accessed on 30 April 2019).
- Giordano, E.; Frank, R.; Pau, G.; Gerla, M. CORNER: A radio propagation model for VANETs in urban scenarios. Proc. IEEE 2011, 99, 1280–1294. [Google Scholar] [CrossRef]
- Giordano, E.; Frank, R.; Pau, G.; Gerla, M. CORNER: A realistic urban propagation model for VANET. In Proceedings of the 7th International Conference on Wireless On-Demand Netw. Syst. Services (WONS), Kranjska Gora, Slovenia, 3–5 February 2010; pp. 57–60. [Google Scholar]
- Cooper, C.; Franklin, D. Simulation of contrasting clustering paradigms under an experimentally-derived channel model. In Proceedings of the 2014 IEEE 80th Vehicular Technology Conference (VTC2014-Fall), Vancouver, BC, Canada, 14–17 September 2014. [Google Scholar]
- Institute of Transportation Systems, SUMO Simulation of Urban Mobility. Available online: http://sumo.dlr.de/ (accessed on 30 April 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Article | Routing Problem | Methodology | Simulation Model |
|---|---|---|---|
| [25] | Traffic collisions | Bat Algorithm | - |
| [26] | Unknown true Pareto optimal | Dragonfly algorithm (DA) | Test functions |
| [27] | Communication disconnections | Firefly algorithm | NS2 |
| [28] | Capacitated Vehicle Routing Problem (CVRP) | ‘K-GWO’ algorithm | MATLAB 2009a |
| [29] | Rapid topology change | Fuzzy Bacterial Foraging Optimization | NS-2 |
| Notation | Definition |
|---|---|
| V | Networks’ nodes |
| Total nodes in network | |
| TR | Nodes’ transmission range-based defined range in standard of DSRC |
| Degree of adjustment | |
| T | Maximum iterations |
| t | Current iteration |
| D | Degree difference value for Load balancing in ad hoc network = 10 |
| The delta difference value of the clusters in t | |
| Summation Distance of CMs from CHs | |
| Quality of ant tour | |
| , | Equivalent weights assigned to two objective functions and , respectively = 0.5 |
| ABS | Absolute value |
| ED | Euclidian Distance |
| Total CMs in cluster | |
| Tour length or total number of clusters | |
| Pheromone trail value encountered in iteration t | |
| Pheromone evaporation rate | |
| He | Heuristic value |
| Maximum transmission range | |
| Traffic service level of the road | |
| Traffic constant from traffic flow = 0.25 | |
| Traffic density | |
| Traffic Threshold | |
| Local vehicle density | |
| Number of Detected vehicles’ neighbors | |
| Distance between vehicles and it is furthest neighbor in front | |
| Distance between vehicles and it is furthest neighbor behind | |
| NL | Number of roads’ Lanes |
| Parameter | Value |
|---|---|
| Simulations Tool | NS2, SUMO |
| Mobility model | Freeway mobility |
| Radio Propagation model | TwoRayGround |
| Antenna model | Omni-directional |
| MAC layer Protocol | WAVE/IEEE 802.11p |
| Beam-forming technology | MmWave |
| The maximum size of packet in the queue | Priority queue (50 packets) |
| Interface Queue Type | Drop TailQueue |
| Population size (ants) | =number of vehicles |
| Node movement | Bidirectional |
| Maximum iterations | 150 |
| Grid size | 4 km |
| Velocity | 22–30 m/s uninform |
| Number of network nodes | 40, 80, 120, 160 and 200 vehicles |
| Transport layer protocols | UDP |
| Traffic Type | CBR |
| Transmission range | Dynamic |
| Packet size | 512 bytes |
| Simulations run | 10 |
| Confidence interval | 95 % |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebadinezhad, S.; Dereboylu, Z.; Ever, E. Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV). Sustainability 2019, 11, 2624. https://doi.org/10.3390/su11092624
Ebadinezhad S, Dereboylu Z, Ever E. Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV). Sustainability. 2019; 11(9):2624. https://doi.org/10.3390/su11092624
Chicago/Turabian StyleEbadinezhad, Sahar, Ziya Dereboylu, and Enver Ever. 2019. "Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV)" Sustainability 11, no. 9: 2624. https://doi.org/10.3390/su11092624
APA StyleEbadinezhad, S., Dereboylu, Z., & Ever, E. (2019). Clustering-Based Modified Ant Colony Optimizer for Internet of Vehicles (CACOIOV). Sustainability, 11(9), 2624. https://doi.org/10.3390/su11092624