Review of Wave Energy Converter and Design of Mooring System




Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| World Regions | Wave Energy Potential (TWh/y) |
|---|---|
| Asia | 6200 |
| New Zealand, the Pacific Islands, and Australia | 5600 |
| South America | 4600 |
| North America and Greenland | 4000 |
| Africa | 3500 |
| Western and Northern Europe | 2800 |
| Central America | 1500 |
| The Mediterranean Sea and Atlantic Archipelagos | 1300 |
| Total | 29,500 |
2. WECs
2.1. Historical Background
2.2. Wave Energy Converter Classifications
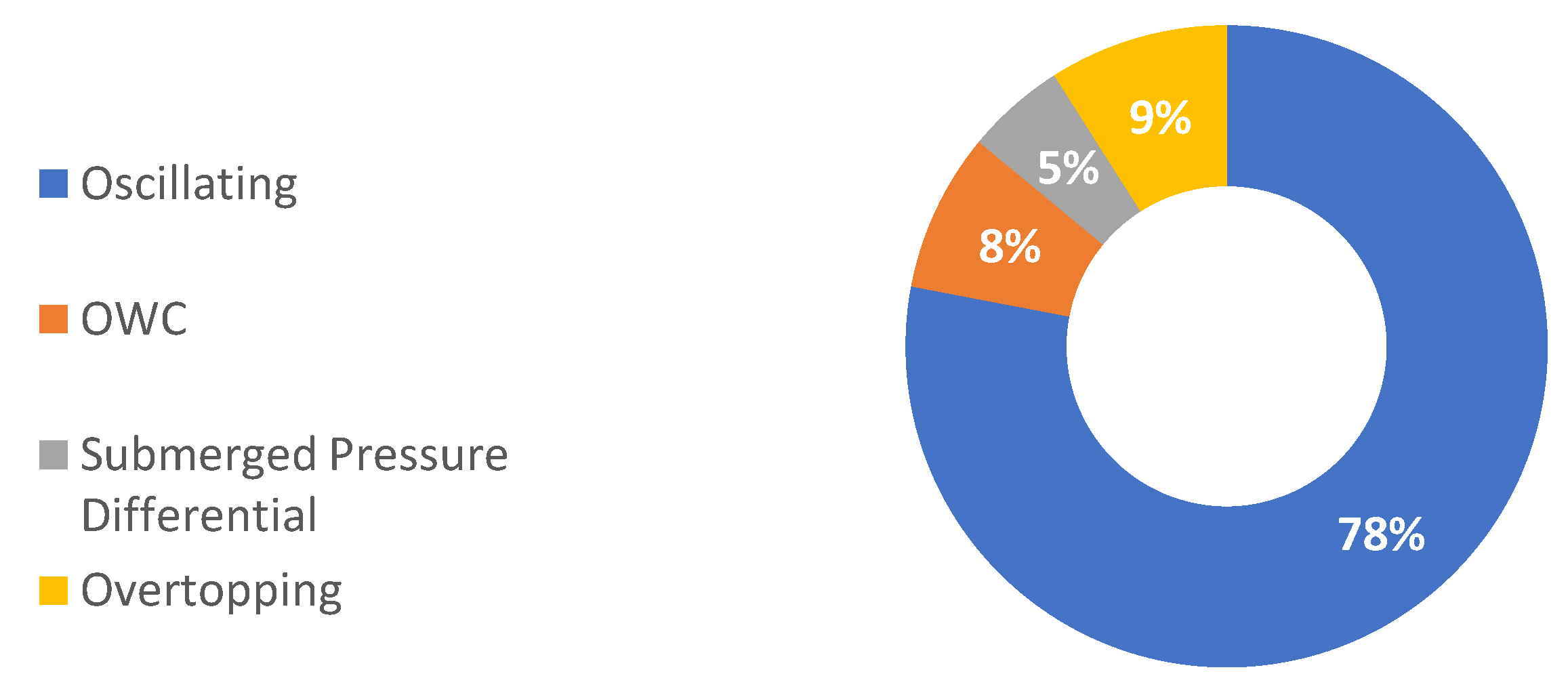
2.2.1. Operational Principle
2.2.2. Direction
2.2.3. Location
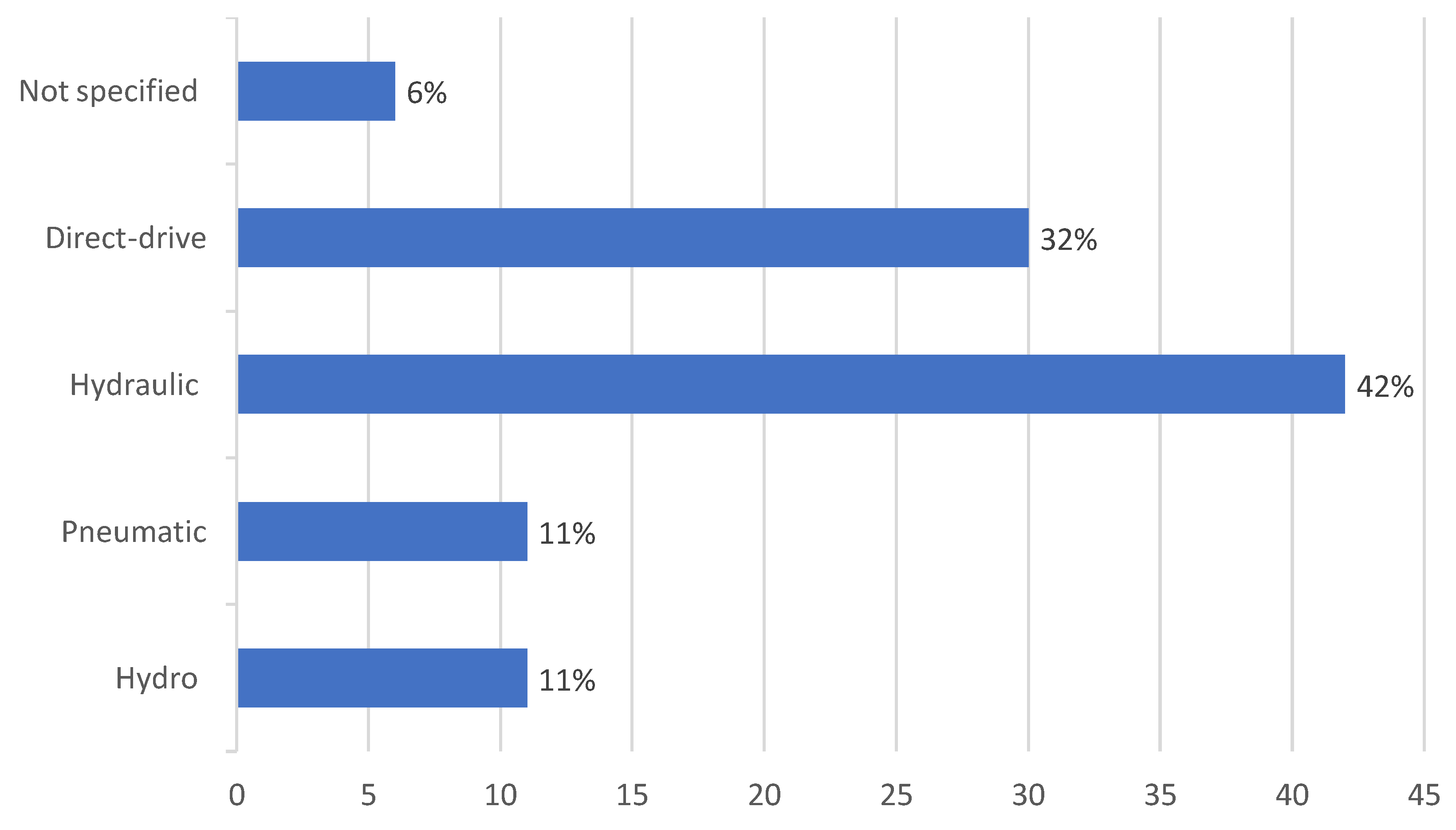
2.2.4. Power Take-Off
| WEC Device Type | Efficiency % |
|---|---|
| Hydro | 85 |
| Pneumatic | 55 |
| Hydraulic | 65 |
| Direct mechanical drive | 90 |
| Direct electrical drive | 95 |
2.3. Power Production Analysis of WECs
2.4. WEC Design Challenges
3. Mooring System for WEC
3.1. Mooring Materials
3.2. Mooring Configurations
3.3. Mooring Requirements
4. Modeling Approaches for WECs
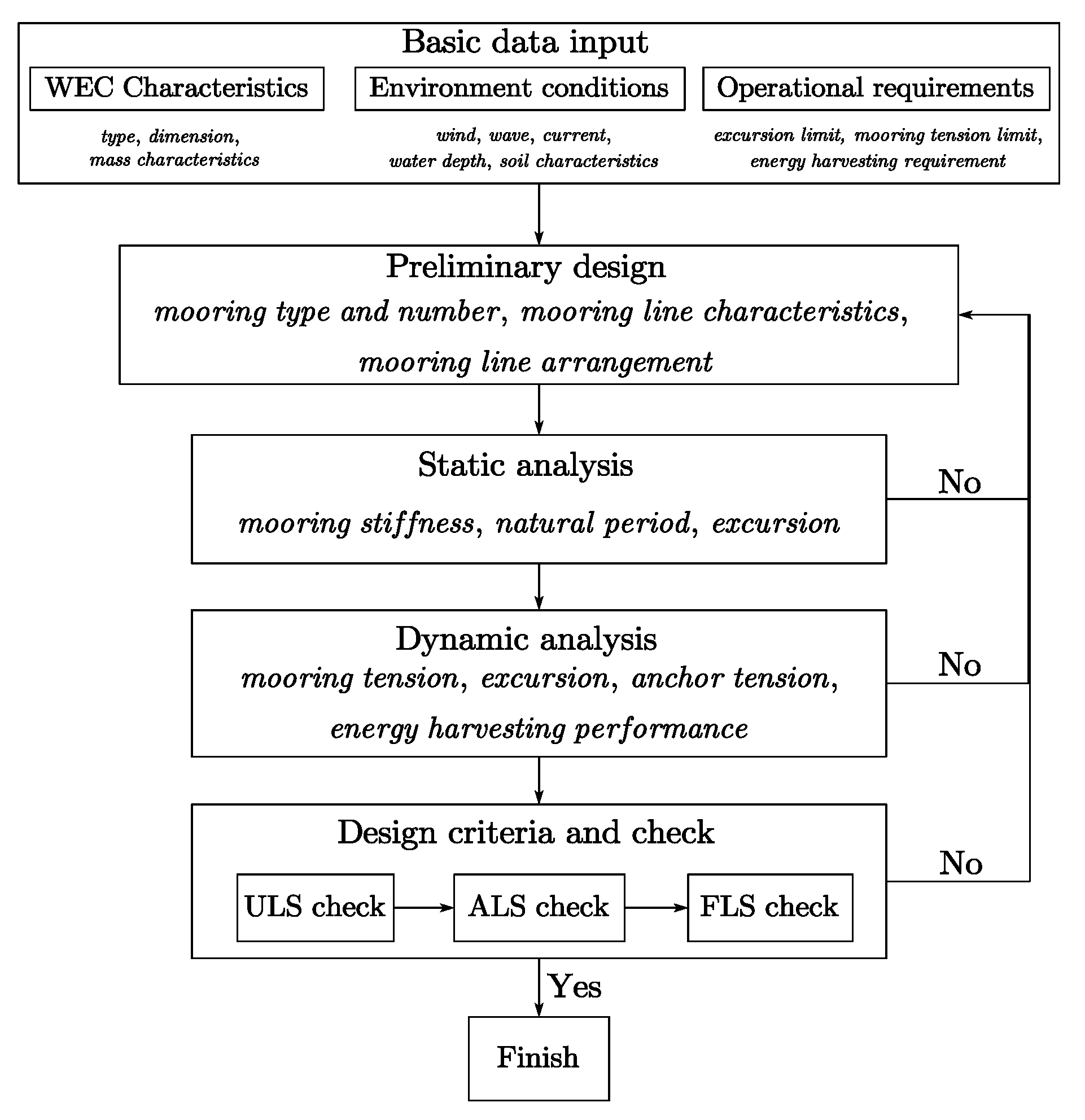
5. Design of Mooring System
5.1. Mooring Design Considerations and Standards
5.2. Analysis Model Types
5.3. Research Status
5.3.1. Mooring Design Concept
5.3.2. Static Approach for Initial Mooring Design
5.3.3. Dynamic Approach for Mooring Design
5.3.4. Optimization Approach for Mooring Design
5.3.5. Experimental Approach for Mooring Design
5.4. Software
5.5. Mooring Design Challenge
5.5.1. Metocean
5.5.2. Responses
5.5.3. Strength and Fatigue
5.5.4. Snap Failure
5.5.5. Installation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Clément, A.; McCullen, P.; Falcão, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S.; et al. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar] [CrossRef]
- Thorpe, T.W. A Brief Review of Wave Energy; Harwell Laboratory, Energy Technology Support Unit: London, UK, 1999. [Google Scholar]
- Ilyas, A.; Kashif, S.A.R.; Saqib, M.A.; Asad, M.M. Wave electrical energy systems: Implementation, challenges and environmental issues. Renew. Sustain. Energy Rev. 2014, 40, 260–268. [Google Scholar] [CrossRef]
- Mork, G.; Barstow, S.; Kabuth, A.; Pontes, M.T. Assessing the Global Wave Energy Potential. In Proceedings of the OMAE2010 29th International Conference on Ocean, Offshore Mechanics and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Izadparast, A.H.; Niedzwecki, J.M. Estimating the potential of ocean wave power resources. Ocean Eng. 2011, 38, 177–185. [Google Scholar] [CrossRef]
- Mollison, D. Hydrodynamics of Ocean Wave-Energy Utilization; Springer: Berlin, Germany, 1986; pp. 133–156. [Google Scholar]
- Lenee-Bluhm, P.; Paasch, R.; Özkan-Haller, H.T. Characterizing the wave energy resource of the US Pacific Northwest. Renew. Energy 2011, 36, 2106–2119. [Google Scholar] [CrossRef]
- Iglesias, G.; López, M.; Carballo, R.; Castro, A.; Fraguela, J.A.; Frigaard, P. Wave energy potential in Galicia (NW Spain). Renew. Energy 2009, 34, 2323–2333. [Google Scholar] [CrossRef]
- Citiroglu, H.K.; Okur, A. An approach to wave energy converter applications in Eregli on the Western Black Sea Coast of Turkey. Appl. Energy 2014, 135, 738–747. [Google Scholar] [CrossRef]
- Haces-Fernandez, F. Investigation on the Possibility of Extracting Wave Energy from the Texas Coast. Master’s Thesis, Texas A&M University Kingsville, Kingsville, TX, USA, 2014. [Google Scholar]
- IEA–International Energy Agency. Available online: https://www.iea.org/ (accessed on 20 July 2020).
- Cruz, J. Ocean Wave Energy Current Status and Future Perspectives; Springer: Berlin, Germany, 2008. [Google Scholar]
- IRENA–International Renewable Energy Agency. Available online: https://www.irena.org/ (accessed on 20 July 2020).
- Jones, N. The Outlook for Energy: A View to 2040; Technical Report by Exxon Mobil Corporation: Spring, TX, USA, 2015. [Google Scholar]
- Annual Report Ocean Energy Systems. Available online: https://report2016.ocean-energy-systems.org/ (accessed on 20 July 2020).
- Jacobson, P.T.; Hagerman, G.; Scott, G. Mapping and Assessment of the United States Ocean Wave Energy Resource; Electric Power Research Institute: Palo Alto, CA, USA, 2011. [Google Scholar]
- Lawrence, J.; Kofoed-Hansen, H.; Chevalier, C. High-Resolution Metocean Modelling at EMEC’s (UK) Marine Energy Test Sites. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Neary, V.S.; Lawson, M.; Previsic, M.; Copping, A.; Hallett, K.C.; LaBonte, A.; Murray, D. Methodology for Design and Economic Analysis of Marine Energy Conversion (MEC) Technologies; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2014. [Google Scholar]
- Cada, G.; Ahlgrimm, J.; Bahleda, M.; Bigford, T.; Stavrakas, S.D.; Hall, D.; Moursund, R.; Sale, M. Potential impacts of hydrokinetic and wave energy conversion technologies on aquatic environments. Fisheries 2007, 32, 174–181. [Google Scholar] [CrossRef]
- Brekken, T.K.; von Jouanne, A.; Han, H.Y. Ocean wave energy overview and research at Oregon State University. In Proceedings of the Power Electronics and Machines in Wind Applications, Lincoln, NE, USA, 24–26 June 2009. [Google Scholar]
- Ocean Power Technologies. Available online: https://oceanpowertechnologies.com/new-homepage-alt/ (accessed on 20 July 2020).
- Whittaker, T.; Collier, D.; Folley, M.; Osterried, M.; Henry, A.; Crowley, M. The Development of Oyster A Shallow Water Surging Wave Energy Converter. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 1 September 2007. [Google Scholar]
- Pelc, R.; Fujita, R.M. Renewable energy from the ocean. Mar. Policy 2002, 26, 471–479. [Google Scholar] [CrossRef]
- Czech, B.; Bauer, P. Wave energy converter concepts: Design challenges and classification. IEEE Ind. Electron. Mag. 2012, 6, 4–16. [Google Scholar] [CrossRef]
- Lehmann, M.; Karimpour, F.; Goudey, C.A.; Jacobson, P.T.; Alam, M.-R. Ocean wave energy in the United States: Current status and future perspectives. Renew. Sustain. Energy Rev. 2017, 74, 1300–1313. [Google Scholar] [CrossRef]
- Fitzgerald, J. Position Mooring of Wave Energy Converters. Ph.D. Thesis, Chalmers Univerisity of Technology, Gothenburg, Sweden, 2009. [Google Scholar]
- Martinelli, L.; Ruol, P.; Cortellazzo, G. On Mooring Design of Wave Energy Converters the Seabreath Application. In Proceedings of the 33rd International Conference Coastal Engineering, Padua, Italy, 1–6 July 2012. [Google Scholar]
- Fitzgerald, J.; Bergdahl, L. Including moorings in the assessment of a generic offshore wave energy converter: A frequency domain approach. Mar. Struct. 2008, 21, 23–46. [Google Scholar] [CrossRef]
- Webster, W.C. Mooring-induced damping. Ocean Eng. 1995, 22, 571–591. [Google Scholar] [CrossRef]
- IRENA. Wave Energy Technology Brief. 2014. Available online: www.irena.org (accessed on 21 July 2020).
- McCormick, M.E. Ocean Wave Energy Conversion; Courier Corporation: North Chelmsford, MA, USA, 1981. [Google Scholar]
- Ross, D. Power from the Waves; Oxford University Press: New York, NY, USA, 1995. [Google Scholar]
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Masuda, Y. An experience of wave power generator through tests and improvement. In Hydrodynamics of Ocean Wave-Energy Utilization; Springer: Berlin/Heidelberg, Germany, 1986; pp. 445–452. [Google Scholar]
- Masters, C.D.; Root, D.H.; Dietzman, W.D. Distribution and quantitative assessment of world crude-oil reserves and resources. In The Changing Carbon Cycle; Springer: New York, NY, USA, 1986; pp. 491–507. [Google Scholar]
- McGlade, C.; Ekins, P. The geographical distribution of fossil fuels unused when limiting global warming to 2 C. Nature 2015, 517, 187–190. [Google Scholar] [CrossRef]
- Previsic, M.; Moreno, A.; Bedard, R.; Polagye, B.; Collar, C.; Lockard, D.; Rocheleau, R. Hydrokinetic Energy In The United States—Resources, Challenges and Opportunities. In Proceedings of the 8th European Wave Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Grove-Palmer, C.O.J. Wave Energy in the United Kingdom: A Review of the Programme June 1975 to March 1982. In Proceedings of the 2nd International Symposium on Wave Energy Utilization, Trondheim, Norway, 22–24 June 1982. [Google Scholar]
- Salter, S.H. Wave power. Nature 1974, 249, 720–724. [Google Scholar] [CrossRef]
- Shaw, R. Wave Energy A Design Challenge; Ellis Horwood: Chichester, UK, 1982. [Google Scholar]
- Charlier, R.H.; Justus, J.R. Ocean Energies: Environmental, Economic and Technological Aspects of Alternative Power Sources; Elsevier: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Cruz, J. Ocean Wave Energy Current Status and Future Prespectives; Springer: Berlin, Germany, 2007. [Google Scholar]
- Brooke, J. Wave Energy Conversion; Elsevier: Amsterdam, The Netherlands, 2003. [Google Scholar]
- WaveNet, Results from the Work of the European Thematic Network on Wave Energy. Available online: http://www.wave-energy.net/Main.htm (accessed on 21 July 2020).
- Salter, S.H. World Progress in Wave Energy—1988. Int. J. Ambient Energy 1989, 10, 3–24. [Google Scholar] [CrossRef]
- Thorpe, T.W. An Overview of Wave Energy Technologies: Status, Performance and Costs; Moving towards Commercial Viability: London, UK, 1999. [Google Scholar]
- Falcão, A.F.d.O. First-Generation Wave Power Plants Current Status and R&D Requirements. In Proceedings of the 22nd International Conference on Offshore Mechanics and Arctic Engineering, Cancun, Mexico, 8–13 June 2003. [Google Scholar]
- Murray, R. Review and Analysis of Ocean Energy Systems Development and Supporting Policies; Implementing Agreement on Ocean Energy Systems: Ireland, UK, 2006. [Google Scholar]
- Hagerman, G. Wave Energy Resource and Economic Assessment for the State of Hawaii; SEASUN Power System: Alexandria, VA, USA, 1992. [Google Scholar]
- Magagna, D.; Uihlein, A. Ocean energy development in Europe current status and future perspectives. Int. J. Mar. Energy 2015, 11, 84–104. [Google Scholar] [CrossRef]
- Merigaud, A.; Gilloteaux, J.-C.; Ringwood, J.V. A Nonlinear Extension for Linear Boundary Element Methods in Wave Energy Device Modelling. In Proceedings of the ASME 31st International Conference on Ocean Offshore and Arctic Engineering, Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- Antonio, F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar]
- Falcão, A.F.O.; Henriques, J.C.C. Oscillating-water-column wave energy converters and air turbines: A review. Renew. Energy 2016, 85, 1391–1424. [Google Scholar] [CrossRef]
- Medina-Lopez, E.; Allsop, W.; Dimakopoulos, A.; Bruce, T. Conjectures on the Failure of the OWC Breakwater at Mutriku. In Proceedings of the Coastal Structures and Solutions to Coastal Disasters Joint Conference 2015, Boston, MA, USA, 9–11 September 2015. [Google Scholar]
- Bedard, R.; Hagerman, G. E2I EPRI Assessment Offshore Wave Energy Conversion Devices; Electricity Innovation Institute: Washington, DC, USA, 2004. [Google Scholar]
- Australian Renewable Energy Agency. Available online: https://arena.gov.au/ (accessed on 20 July 2020).
- Whittaker, T.J.T.; Beattie, W.; Folley, M.; Boake, C.; Wright, A.; Osterried, M.; Heath, T. The limpet wave power project—The first years of operation. Renew. Energy 2004, 1–8. [Google Scholar]
- Falcão, A.F.O. The Shoreline OWC Wave Power Plant at the Azores. In Proceedings of the 4th European Wave Energy Conference, Aalborg, Denmark, 4–6 December 2000. [Google Scholar]
- Lindroth, S.; Leijon, M. Offshore wave power measurements—A review. Renew. Sustain. Energy Rev. 2011, 15, 4274–4285. [Google Scholar] [CrossRef]
- Falcão, A.F.O.; Henriques, J.C.C.; Cândido, J.J. Dynamics and optimization of the OWC spar buoy wave energy converter. Renew. Energy 2012, 48, 369–381. [Google Scholar] [CrossRef]
- Masuda, Y.; Yamazaki, T.; Outa, Y.; McCormick, M. Study of Backward Bent Duct Buoy. In Proceedings of the OCEANS’87, Halifax, NS, Canada, 28 September–1 October 1987. [Google Scholar]
- European Marine Energy Centre. Available online: http://www.emec.org.uk/marine-energy/wave-devices/ (accessed on 20 July 2020).
- Wave developers European Marine Energy Centre. Available online: http://www.emec.org.uk/marine-energy/wave-developers/ (accessed on 20 July 2020).
- CorPower Ocean. Available online: https://www.corpowerocean.com/ (accessed on 20 July 2020).
- Ocean Power Technologies. Available online: https://oceanpowertechnologies.com/pb3-powerbuoy/ (accessed on 20 July 2020).
- Carnegie Clean Energy. Available online: https://www.carnegiece.com/technology/ (accessed on 20 July 2020).
- SEABASED. Available online: https://seabased.com/ (accessed on 20 July 2020).
- Babarit, A.; Hals, J.; Kurniawan, A.; Muliawan, M.; Moan, T.; Krokstad, J. The NumWEC Project: Numerical Estimation of Energy Delivery from a Selection of Wave Energy Converters; Final Report for Statkraft: Nantes, France, 2011. [Google Scholar]
- Polinder, H.; Damen, M.E.C.; Gardner, F. Design, modelling and test results of the AWS PM linear generator. Eur. Trans. Electr. Power 2005, 15, 245–256. [Google Scholar] [CrossRef]
- Algie, C.; Ryan, S.; Fleming, A. Predicted power performance of a submerged membrane pressure-differential wave energy converter. Int. J. Mar. Energy 2017, 20, 125–134. [Google Scholar] [CrossRef]
- Valério, D.; Beirão, P.; Da Costa, J.S. Optimisation of wave energy extraction with the archimedes wave swing. Ocean Eng. 2007, 34, 2330–2344. [Google Scholar] [CrossRef]
- Evans, D.V.; Falcao, A.F.O. Hydrodynamics of Ocean Wave-Energy Utilization; Springer: New York, NY, USA, 1985. [Google Scholar]
- Kofoed, J.P.; Frigaard, P.; Friis-Madsen, E.; Sørensen, H.C. Prototype testing of the wave energy converter wave dragon. Renew. Energy 2006, 31, 181–189. [Google Scholar] [CrossRef]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. Hydraulic Characteristics of Seawave Slot-Cone Generator Pilot Plant at Kvitsøy (Norway). In Proceedings of the 7th European Wave Tidal Energy Conference, Porto, Portugal, 11–13 September 2007. [Google Scholar]
- Wave Dragon. Available online: http://www.wavedragon.net/ (accessed on 20 July 2020).
- Babarit, A. A database of capture width ratio of wave energy converters. Renew. Energy 2015, 80, 610–628. [Google Scholar] [CrossRef]
- Babarit, A.; Wendt, F.; Yu, Y.-H.; Weber, J. Investigation on the energy absorption performance of a fixed-bottom pressure-differential wave energy converter. Appl. Ocean Res. 2017, 65, 90–101. [Google Scholar] [CrossRef]
- International Renewable Energy Agency (IRENA). Ocean Energy: Technologies, Patents, Deployment Status and Outlook; IRENA: Abu Dhabi, UAE, 2014. [Google Scholar]
- Pizer, D.J.; Retzler, C.H.; Yemm, R.W. The OPD Pelamis Experimental and Numerical Results from the Hydrodynamic Work Program. In Proceedings of the 4th EWTEC European Wave Energy Conference, Aalborg, Denmark, 4–6 December 2000. [Google Scholar]
- Mueller, M.; Wallace, R. Enabling science and technology for marine renewable energy. Energy Policy 2008, 36, 4376–4382. [Google Scholar] [CrossRef]
- European Marine Energy Centre. Available online: http://www.emec.org.uk/about-us/wave-clients/pelamis-wave-power/ (accessed on 23 July 2020).
- López, I.; Andreu, J.; Ceballos, S.; De Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A Review of Wave Energy Converter Technology; Sage Publications Sage UK: London, UK, 2009. [Google Scholar]
- Bjerrum, A. The Wave Star Energy Concept. In Proceedings of the 2nd International Conference on Ocean Energy, Brest, France, 15–17 October 2008. [Google Scholar]
- Taghipour, R.; Moan, T. Efficient Frequency-Domain Analysis of Dynamic Response for the Multi-Body Wave Energy Converter in Multi-Directional Wave. In Proceedings of the 18th International Offshore and Polar Engineering Conference, Vancouver, BC, Canada, 6–11 July 2008. [Google Scholar]
- REUK.co.uk. Available online: http://www.reuk.co.uk/wordpress/wave/manchester-bobber-wave-power/ (accessed on 23 July 2020).
- Falnes, J.; Hals, J. Heaving Buoys, Point Absorbers and Arrays. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 246–277. [Google Scholar] [CrossRef] [PubMed]
- WaveRoller. Available online: https://aw-energy.com/waveroller/ (accessed on 23 July 2020).
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Aderinto, T.; Li, H. Ocean wave energy converters: Status and challenges. Energies 2018, 11, 1250. [Google Scholar] [CrossRef]
- Pecher, A.; Peter Kofoed, J. Handbook of Ocean Wave Energy; Springer Nature: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Yemm, R.; Pizer, D.; Retzler, C.; Henderson, R. Pelamis: Experience from concept to connection. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 365–380. [Google Scholar] [CrossRef] [PubMed]
- Weber, J.; Mouwen, F.; Parish, A.; Robertson, D. Wavebob—Research & Development Network and Tools in the Context of Systems Engineering. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Ruellan, M.; BenAhmed, H.; Multon, B.; Josset, C.; Babarit, A.; Clement, A. Design methodology for a SEAREV wave energy converter. IEEE Trans. Energy Convers. 2010, 25, 760–767. [Google Scholar] [CrossRef]
- Arena, F.; Ascanelli, A.; Romolo, A. On Design of the First Prototype of a REWEC3 Caisson Breakwater to Produce Electrical Power from Wave Energy. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Ohneda, H.; Igarashi, S.; Shinbo, O.; Sekihara, S.; Suzuki, K.; Kubota, H.; Morita, H. Construction Procedure of a Wave Power Extracting Caisson Breakwater. In Proceedings of the 3rd Symposium on Ocean Energy Utilization, Tokyo, Japan, 22–23 January 1991. [Google Scholar]
- Weinstein, A.; Fredrikson, G.; Parks, M.J.; Nielsen, K. AquaBuOY-the Offshore Wave Energy Converter Numerical Modeling and Optimization. In Proceedings of the OCEANS’04–MTTS/IEEE TECHNO-OCEAN’04, Kobe, Japan, 9–12 November 2004. [Google Scholar]
- Fadaeenejad, M.; Shamsipour, R.; Rokni, S.D.; Gomes, C. New approaches in harnessing wave energy: With special attention to small islands. Renew. Sustain. Energy Rev. 2014, 29, 345–354. [Google Scholar] [CrossRef]
- Nielsen, K. Ocean Energy Technology Study; DanWEC: Thisted, Denmark, 2012. [Google Scholar]
- McDonald, A.; Schrattenholzer, L. Learning rates for energy technologies. Energy Policy 2001, 29, 255–261. [Google Scholar] [CrossRef]
- Mueller, M.; Jeffrey, H. UKERC Marine (Wave and Tidal Current) Renewable Energy Technology Roadmap: Summary Report; UK Energy Research Centre, University of Edinburgh: Edinburgh, UK, 2008. [Google Scholar]
- Krohn, D.; Woods, M.; Adams, J.; Valpy, B.; Jones, F.; Gardner, P. Wave and Tidal Energy in the UK: Conquering Challenges, Generating Growth; Renewable UK: London, UK, 2013. [Google Scholar]
- Guanche, R.; De Andres, A.D.; Simal, P.D.; Vidal, C.; Losada, I.J. Uncertainty analysis of wave energy farms financial indicators. Renew. Energy 2014, 68, 570–580. [Google Scholar] [CrossRef]
- Shek, J.K.H.; Macpherson, D.E.; Mueller, M.A. Experimental verification of linear generator control for direct drive wave energy conversion. IET Renew. Power Gener. 2010, 4, 395–403. [Google Scholar] [CrossRef]
- Det Norske Veritas (DNV). Guidelines on Design and Operation of Wave Energy Converters; DNV: Oslo, Norway, 2005. [Google Scholar]
- Haces-Fernandez, F.; Li, H.; Jin, K. Investigation into the possibility of extracting wave energy from the Texas Coast. Int. J. Energy Clean Environ. 2019, 20, 23–41. [Google Scholar] [CrossRef]
- Haces-Fernandez, F.; Li, H.; Ramirez, D. Assessment of the potential of energy extracted from waves and wind to supply offshore oil platforms operating in the Gulf of Mexico. Energies 2018, 11, 1084. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P. Assessment of Current State of Mooring Design in the Danish Wave Energy Sector. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Gao, Z.; Moan, T. Mooring System Analysis of Multiple Wave Energy Converters in a Farm Configuration. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Karimirad, M.; Koushan, K.; Weller, S.; Hardwick, J.; Johanning, L. Applicability of Offshore Mooring and Foundation Technologies for Marine Renewable Energy (MRE) Device Arrays. In Proceedings of the International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014. [Google Scholar]
- Vryhof. Available online: https://vryhof.com/ (accessed on 24 July 2020).
- Pasternak, J.D.; Hersley, M.; Leite, S. Increased Offshore MODU Mooring Performance Through MODUline® Polyester Rope. In Proceedings of the 2010 MTS/IEEE OCEANS, Seattle, WA, USA, 1–8 September 2010. [Google Scholar]
- Ridge, I.M.L.; Banfield, S.J.; Mackay, J. Nylon Fibre Rope Moorings for Wave Energy Converters. In Proceedings of the 2010 MTS/IEEE OCEANS, Seattle, WA, USA, 1–8 September 2010. [Google Scholar]
- Harnois, V. Analysis of Highly Dynamic Mooring Systems: Peak Mooring Loads in Realistic Sea Conditions. Ph.D. Thesis, University of Exeter, Exeter, UK, 2014. [Google Scholar]
- Harris, R.E.; Johanning, L.; Wolfram, J. Mooring Systems for Wave Energy Converters: A Review of Design Issues and Choices. In Proceedings of the 3rd International Conference 2004 MAREC, Blyth, UK, 7–9 July 2004. [Google Scholar]
- Weller, S.D.; Johanning, L.; Davies, P.; Banfield, S.J. Synthetic mooring ropes for marine renewable energy applications. Renew. Energy. 2015, 83, 1268–1278. [Google Scholar] [CrossRef]
- Huang, M.; Aggidis, G.A. Developments, Expectations of wave energy converters and mooring anchors in the UK. J. Ocean Univ. China 2008, 7, 10–16. [Google Scholar] [CrossRef]
- Sound and Sea Technology. Advanced Anchoring and Mooring Study; Oregon Wave Energy Trust: Portland, OR, USA, 30 November 2009. [Google Scholar]
- Bruce Anchor. Available online: https://www.bruceanchor.co.uk/ (accessed on 24 July 2020).
- Tavakoli, M.; Brekken, T.K.A.; Bosma, B.; Schacher, A. A Programmable Mooring Controller for Tank Testing of Scaled Wave Energy Converters. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013. [Google Scholar]
- Thies, P.R.; Johanning, L.; McEvoy, P. A novel mooring tether for peak load mitigation: Initial performance and service simulation testing. Int. J. Mar. Energy 2014, 7, 43–56. [Google Scholar] [CrossRef]
- Johanning, L.; Smith, G.H.; Wolfram, J. Measurements of static and dynamic mooring line damping and their importance for floating WEC devices. Ocean Eng. 2007, 34, 1918–1934. [Google Scholar] [CrossRef]
- Johanning, L.; Smith, G.H.; Wolfram, J. Mooring Design approach for wave energy converters. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2006, 220, 159–174. [Google Scholar] [CrossRef]
- Pecher, A.; Foglia, A.; Kofoed, J.P. Comparison and Sensitivity Investigations of a CALM and SALM type mooring system for wave energy converters. J. Mar. Sci. Eng. 2014, 2, 93–122. [Google Scholar] [CrossRef]
- Zanuttigh, B.; Angelelli, E.; Kofoed, J.P. Effects of mooring systems on the performance of a wave activated body energy converter. Renew. Energy 2013, 57, 422–431. [Google Scholar] [CrossRef]
- Cerveira, F.; Fonseca, N.; Pascoal, R. Mooring system influence on the efficiency of wave energy converters. Int. J. Mar. Energy 2013, 3, 65–81. [Google Scholar] [CrossRef]
- Valentine, W.; von Ellenrieder, K.D. Model scaling of ocean hydrokinetic renewable energy systems. IEEE J. Ocean. Eng. 2014, 40, 27–36. [Google Scholar] [CrossRef]
- Fitzgerald, J. Position Mooring of Wave Energy Converters-An Engineering Study into the Mooring of Structures in a Highly Exposed Shallow Ocean Regime, within the Context of the Economics of Renewable Energy Conversion. Ph.D. Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2009. [Google Scholar]
- Det Norske Veritas (DNV). DNV-OS-E301: Position Mooring; DNV: Oslo, Norway, 2008. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Yu, Y.; Li, Y. Preliminary Results of a RANS Simulation for a Floating Point Absorber Wave Energy System under Extreme Wave Conditions. In Proceedings of the ASME 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Ma, Q.W.; Yan, S. QALE-FEM for Numerical Modelling of Non-Linear Interaction between 3D Moored Floating Bodies and Steep Waves. Int. J. Numer. Methods Eng. 2009, 78, 713–756. [Google Scholar] [CrossRef]
- Eskilsson, C.; Palm, J.; Kofoed, J.P.; Friis-Madsen, E. CFD study of the overtopping discharge of the wave dragon wave energy converter. Renew. Energies Offshore 2015, 287–294. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Ringwood, J.V. High-fidelity numerical modelling of ocean wave energy systems: A review of computational fluid dynamics-based numerical wave tanks. Renew. Sustain. Energy Rev. 2018, 93, 610–630. [Google Scholar] [CrossRef]
- Dai, S.; Day, S.; Yuan, Z.; Wang, H. Investigation on the hydrodynamic scaling effect of an OWC type wave energy device using experiment and CFD simulation. Renew. Energy 2019, 142, 184–194. [Google Scholar] [CrossRef]
- Xu, Q.; Li, Y.; Yu, Y.H.; Ding, B.; Jiang, Z.; Lin, Z.; Cazzolato, B. Experimental and numerical investigations of a two-body floating-point absorber wave energy converter in regular waves. J. Fluid Struct. 2019, 91, 102613. [Google Scholar] [CrossRef]
- Windt, C.; Ringwood, J.V.; Davidson, J.; Ransley, E.J.; Jakobsen, M.; Kramer, M. Validation of a CFD-Based Numerical Wave Tank of the Wavestar WEC. In Proceedings of the 3rd International Conference on Renewable Energies Offshore (RENEW 2018), Lisbon, Portugal, 8–10 October 2018. [Google Scholar]
- Seibt, F.M.; Couto, E.C.; dos Santos, E.D.; Isoldi, L.A.; Rocha, L.A.O.; de Freitas Teixeira, P.R. Numerical study on the effect of submerged depth on the horizontal plate wave energy converter. China Ocean Eng. 2014, 28, 687–700. [Google Scholar] [CrossRef]
- Luo, Y.; Wang, Z.; Peng, G.; Xiao, Y.; Zhai, L.; Liu, X.; Zhang, Q. Numerical simulation of a heave-only floating OWC (oscillating water column) device. Energy 2014, 76, 799–806. [Google Scholar] [CrossRef]
- Loh, T.T.; Greaves, D.; Maeki, T.; Vuorinen, M.; Simmonds, D.; Kyte, A. Numerical modelling of the WaveRoller Device Using OpenFOAM. In Proceedings of the 3rd Asian Wave & Tidal Energy Conference, Singapore, 25–27 October 2016. [Google Scholar]
- Connell, K.O.; Thiebaut, F.; Kelly, G.; Cashman, A. Development of a free heaving OWC model with non-linear PTO interaction. Renew. Energy 2018, 117, 108–115. [Google Scholar] [CrossRef]
- Seibt, F.M.; Letzow, M.; das Neves Gomes, M.; Souza, J.A.; Rocha, L.A.O.; dos Santos, E.D.; Isoldi, L.A. Computational modeling applied to the study of wave energy converters (WEC). Mar. Syst. Ocean Tech. 2014, 9, 77–84. [Google Scholar] [CrossRef]
- Elhanafi, A.; Macfarlane, G.; Fleming, A.; Leong, Z. Experimental and numerical investigations on the hydrodynamic performance of a floating–moored oscillating water column wave energy converter. Appl. Energy 2017, 205, 369–390. [Google Scholar] [CrossRef]
- Beatty, S.J.; Roy, A.; Bubbar, K.; Ortiz, J.; Buckham, B.J.; Wild, P.; Nicoll, R. Experimental and Numerical Simulations of Moored Self-Reacting Point Absorber Wave Energy Converters. In Proceedings of the 25th International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Nematbakhsh, A.; Michailides, C.; Gao, Z.; Moan, T. Comparison of Experimental Data of a Moored Multibody Wave Energy Device with a Hybrid CFD and BIEM Numerical Analysis Framework. In Proceedings of the 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Sirigu, A.S.; Gallizio, F.; Giorgi, G.; Bonfanti, M.; Bracco, G.; Mattiazzo, G. Numerical and experimental identification of the aerodynamic power losses of the ISWEC. J. Mar. Sci. Eng. 2020, 8, 49. [Google Scholar] [CrossRef]
- Liu, H.; Yan, F.; Jing, F.; Ao, J.; Han, Z.; Kong, F. Numerical and experimental investigation on a moonpool-buoy wave energy converter. Energies 2020, 13, 2364. [Google Scholar] [CrossRef]
- Zhao, X.L.; Ning, D.Z.; Liang, D.F. Experimental investigation on hydrodynamic performance of a breakwater-integrated WEC system. Ocean Eng. 2019, 171, 25–32. [Google Scholar] [CrossRef]
- Ransley, E.; Yan, S.; Brown, S.A.; Mai, T.; Graham, D.; Ma, Q.; Musiedlak, P.H.; Engsig-Karup, A.P.; Eskilsson, C.; Li, Q.; et al. A blind comparative study of focused wave interactions with a fixed FPSO-like structure (CCP-WSI Blind Test Series 1). Int. J. Offshore Polar Eng. 2019, 29, 113127. [Google Scholar] [CrossRef]
- Allen, J.; Sampanis, K.; Wan, J.; Greaves, D.; Miles, J.; Iglesias, G. Laboratory tests in the development of WaveCat. Sustainability 2016, 8, 1339. [Google Scholar] [CrossRef]
- Sirigu, S.A.; Bonfanti, M.; Begovic, E.; Bertorello, C.; Dafnakis, P.; Giorgi, G.; Mattiazzo, G. Experimental investigation of the mooring system of a wave energy converter in operating and extreme wave conditions. J. Mar. Sci. Eng. 2020, 8, 180. [Google Scholar] [CrossRef]
- Van Rij, J.; Yu, Y.H.; McCall, A.; Coe, R.G. Extreme Load Computational Fluid Dynamics Analysis and Verification for a Multibody Wave Energy Converter. In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019. [Google Scholar]
- Oortmerssen, I.G.V. The Motions of a Moored Ship in Waves; Netherlands Ship Model Basin: Wageningen, The Netherlands, 1976. [Google Scholar]
- Cummins, W.E. The Impulse Response Function and Ship Motions; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Bergdahl, L.; Martensson, N. Certification of Wave Energy Plants–Discussion of Existing Guidelines, Especially for Mooring Design. In Proceedings of the 2nd European Wave Power Conference, Lisbon, Portugal, 8–10 November 1995. [Google Scholar]
- Det Norske Veritas (DNV). DNV-OC-F101: Submarine Pipeline Systems; DNV: Oslo, Norway, 2013. [Google Scholar]
- American Petroleum Institute (API). API-RP-2SK: Design and Analysis of Stationkeeping Systems for Floating Structures, 2nd ed.; API: Washington, DC, USA, 1996. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-OS-E301: Position Mooring; DNVGL: Oslo, Norway, 2018. [Google Scholar]
- International Organization for Standardization (ISO). ISO/TS 14909: Fibre Ropes for Offshore Stationkeeping High Modulus Polyethylene (HMPE); BSI: Geneva, Switzerland, 2012. [Google Scholar]
- International Electrotechnical Commission (IEC). IEC TS 62600-10: Marine Energy—Wave, Tidal and Other Water Current Converters; IEC: Geneva, Switzerland, 2015. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-OS-E304: Offshore Mooring Steel Wire Ropes; DNVGL: Oslo, Norway, 2015. [Google Scholar]
- Det Norske Veritas (DNV). DNV-RP-H103: Modelling and Analysis of Marine Operations; DNV: Oslo, Norway, 2010. [Google Scholar]
- Det Norske Veritas (DNV). DNV-OS-J103: Design of Floating Wind Turbine Structures; DNV: Oslo, Norway, 2013. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-RP-F205: Global Performance Analysis of Deepwater Floating Structures; DNV: Oslo, Norway, 2017. [Google Scholar]
- Construction Industry Research and Information Association (CIRIA). CIRIA-C666: Guidelines for the Use of Metocean Data Through the Life Cycle of a Marine Renewable Energy Development, 2nd ed.; CIRIA: London, UK, 2008. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-RP-N103: Modelling and Analysis of Marine Operations; DNVGL: Oslo, Norway, 2017. [Google Scholar]
- Det Norske Veritas (DNV). DNV-RP-C205: Environmental Conditions and Environmental Loads; DNV: Oslo, Norway, 2010. [Google Scholar]
- American Petroleum Institute (API). API-RP-2SM: Design, Manufacture, Installation, and Maintenance of Synthetic Fiber Ropes for Offshore Mooring, 2nd ed.; API: Washington, DC, USA, 2014. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-RP-E302: Design and Installation of Plate Anchors in Clay; DNVGL: Oslo, Norway, 2017. [Google Scholar]
- American Petroleum Institute (API). API-RP-2I: In-service Inspection of Mooring Hardware for Floating Structures, 3rd ed.; API: Washington, DC, USA, 2008. [Google Scholar]
- International Organization for Standardization (ISO). ISO 18692: Fibre Ropes for Offshore Stationkeeping—Polyester; BSI: Geneva, Switzerland, 2007. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-OS-E303: Offshore Fibre Ropes; DNVGL: Oslo, Norway, 2018. [Google Scholar]
- International Organization for Standardization (ISO). ISO 19901-7: Petroleum and Natural Gas Industries—Specific Requirements for Offshore Structures—Part 7: Stationkeeping Systems for Floating Offshore Structures and Mobile Offshore Units, 2nd ed.; BSI: Geneva, Switzerland, 2013. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-OS-C101: Design of Offshore Steel Structures, General-LRFD Method; DNVGL: Oslo, Norway, 2015. [Google Scholar]
- American Bureau of Shipping (ABS). Guidance Notes on Nearshore Position Mooring; ABS: Spring, TX, USA, 2019. [Google Scholar]
- Det Norske Veritas Germanischer Lloyd (DNVGL). DNVGL-OS-E302: Offshore Mooring Chain; DNVGL: Oslo, Norway, 2018. [Google Scholar]
- Vickers, A. Improve the Understanding of Uncertainties in Numerical Analysis of Moored FloatingWave Energy Converters. Ph.D. Thesis, University of Exeter, Exeter, UK, 2012. [Google Scholar]
- Johanning, L.; Smith, G.H.; Wolfram, J. Towards Design Standards for WEC Moorings. In Proceedings of the 6th European Wave and Tidal Energy Conference, Glasgow, UK, 29 August–2 September 2005. [Google Scholar]
- American Petroleum Institute (API). API-RP-2SK: Design and Analysis of Stationkeeping Systems for Floating Structures, 3rd ed.; API: Washington, DC, USA, 2005. [Google Scholar]
- Fitzgerald, J.; Bergdahl, L. Considering Mooring Cables for Offshore Wave Energy Converters. In Proceedings of the 7th European Wave Tidal Energy Conference, Porto, Portugal, 11–13 September 2007. [Google Scholar]
- Zanuttigh, B.; Martinelli, L.; Castagnetti, M. Screening of Suitable Mooring Systems; Aalborg University: Esbjerg, Denmark, 2012. [Google Scholar]
- Bergdahl, L.; Kofoed, J.P. Simplified Design Procedures for Moorings of Wave-Energy Converters; Aalborg University: Esbjerg, Denmark, 2015. [Google Scholar]
- Thomsen, J.B.; Kofoed, J.P.; Delaney, M.; Banfield, S. Initial Assessment of Mooring Solutions for Floating Wave Energy Converters. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016. [Google Scholar]
- Thomsen, J.B. Mooring Solutions for Large Wave Energy Converters. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Thomsen, J.B.; Delaney, M. Preliminary Analysis and Selection of Mooring Solution Candidates; Aalborg University: Esbjerg, Denmark, 2018. [Google Scholar]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P.; Black, K. Cost optimization of mooring solutions for large floating wave energy converters. Energies 2018, 11, 159. [Google Scholar] [CrossRef]
- Monarcha, A.; Fonseca, N. A static analytical method for the preliminary design of multiple line mooring systems. In Maritime Engineering and Technology; Taylor and Francis Group: London, UK, 2012. [Google Scholar]
- Fonseca, N.; Pascoal, R.; Morais, T.; Dias, R. Design of a Mooring System with Synthetic Ropes for the FLOW Wave Energy Converter. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Brown, D.T.; Mavrakos, S. Comparative study on mooring line dynamic loading. Mar. Struct. 1999, 12, 131–151. [Google Scholar] [CrossRef]
- Liu, Y. Dynamics and Extreme Value Problems for Moored Floating Platforms. Ph.D. Thesis, Chalmers University of Technology, Goteborg, Sweden, 1998. [Google Scholar]
- Liu, Y.; Bergdahl, L. Extreme mooring cable tensions due to wave-frequency excitations. Appl. Ocean Res. 1998, 20, 237–249. [Google Scholar] [CrossRef]
- Liu, Y.; Bergdahl, L. On combination formulae for the extremes of wave-frequency and low-frequency responses. Appl. Ocean Res. 1999, 21, 41–46. [Google Scholar] [CrossRef]
- Masciola, M.; Jonkman, J.; Robertson, A. Extending the Capabilities of the Mooring Analysis Program: A Survey of Dynamic Mooring Line Theories for Integration into Fast. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Bergdahl, L. Mooring design for WECs. In Handbook on Ocean Wave Energy; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Shafieefar, M.; Rezvani, A. mooring optimization of floating platforms using a genetic algorithm. Ocean Eng. 2007, 34, 1413–1421. [Google Scholar] [CrossRef]
- Pillai, A. Multi-Objective Optimization of Mooring Systems for Offshore Renewable Energy. In Proceedings of the 12th European Wave and Tidal Energy Conference, University College Cork, University College Cork, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Pillai, A.C.; Thies, P.R.; Johanning, L. Mooring system design optimization using a surrogate assisted multi-objective genetic algorithm. Eng. Optim. 2019, 51, 1370–1392. [Google Scholar] [CrossRef]
- Li, L.; Jiang, Z.; Ong, M.C.; Hu, W. Design optimization of mooring system: An application to a vessel-shaped offshore fish farm. Eng. Struct. 2019, 197, 109363. [Google Scholar] [CrossRef]
- Wang, Z. An Evolutionary Optimisation Study on Offshore Mooring System Design. Ph.D. Thesis, University of Wollongong, Wollongong, NSW, Australia, 2012. [Google Scholar]
- Sirigu, S.A.; Bonfanti, M.; Passione, B.; Begovic, E.; Bertorello, C.; Dafnakis, P.; Mattiazzo, G. Experimental Investigation of the Hydrodynamic Performance of the ISWEC 1: 20 Scaled Device. In Proceedings of the NAV International Conference on Ship and Shipping Research, Venice, Italy, 19–22 September 2018. [Google Scholar]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E.; Hu, Z.; Bergdahl, L.; Duan, F. Experimental and numerical investigation of a taut-moored wave energy converter: A validation of simulated buoy motions. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2018, 232, 97–115. [Google Scholar] [CrossRef]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E.; Hu, Z. Experimental and numerical investigation of a taut-moored wave energy converter: A validation of simulated mooring line forces. Ships Offshore Struc. 2020, 1–15. [Google Scholar] [CrossRef]
- Wu, M.; Stratigaki, V.; Verbrugghe, T.; Troch, P.; Altomare, C.; Crespo, A.; Gómez-Gesteira, M. Experimental Study of Motion and Mooring Behavior of a Floating Oscillating Water Column Wave Energy Converter. In Proceedings of the 7th International Conference on the Application of Physical Modelling in Coastal and Port Engineering and Science, Santander, Spain, 22–26 May 2018. [Google Scholar]
- Hann, M.; Greaves, D.; Raby, A. Snatch loading of a single taut moored floating wave energy converter due to focussed wave groups. Ocean Eng. 2015, 96, 258–271. [Google Scholar] [CrossRef]
- Paredes, G.M.; Palm, J.; Eskilsson, C.; Bergdahl, L.; Taveira-Pinto, F. Experimental investigation of mooring configurations for wave energy converters. Int. J. Mar. Energy 2016, 15, 56–67. [Google Scholar] [CrossRef]
- Swift, M.R.; Dewhurst, T.; Baldwin, K.; Wosnik, M. Design of a Mooring System for an Inertia Tube Wave Energy Collector. In Proceedings of the 2014 Oceans-St. John’s, St. John’s, NL, Canada, 14–19 September 2014. [Google Scholar]
- Ortiz, J.P.; Bailey, H.; Buckham, B.; Crawford, C. Surrogate Based Design of a Mooring System for a Self-Reacting Point Absorber. In Proceedings of the 25th International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Fernandez, H.; Iglesias, G.; Carballo, R.; Castro, A.; Fraguela, J.A.; Taveira-Pinto, F.; Sanchez, M. The new wave energy converter WaveCat: Concept and laboratory tests. Mar. Struct. 2012, 29, 58–70. [Google Scholar] [CrossRef]
- Huang, S.; Sheng, S.; You, Y.; Gerthoffert, A.; Wang, W.; Wang, Z. Numerical study of a novel flex mooring system of the floating wave energy converter in ultra-shallow water and experimental validation. Ocean Eng. 2018, 151, 342–354. [Google Scholar] [CrossRef]
- Vicente, P.C.; Falcao, A.F.O.; Justino, P.A.P. Optimization of Mooring Configuration Parameters of Floating Wave Energy Converters. In Proceedings of the ASME 2011 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Beatty, S.J.; Hiles, C.; Nicoll, R.S.; Adamson, J.E.; Buckham, B.J. Design Synthesis of a Wave Energy Converter. In Proceedings of the OMAE 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Lavelle, J.; Kofoed, J.P. Experimental Testing of the Langlee Wave Energy Converter. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Vicente, P.C.; Falcão, A.F.; Justino, P.J. Slack-Chain Mooring Configuration Analysis of a Floating Wave Energy Converter. In Proceedings of the 26th International Workshop on Water Waves and Floating Bodies, Athens, Greece, 17 April 2011. [Google Scholar]
- Friis-Madsen, E.; Sørensen, H.C.; Parmeggiani, S. The Development of a 1.5 MW Wave Dragon North Sea Demonstrator. In Proceedings of the 4th International Conference on Ocean Energy, Dublin, Ireland, 12–15 October 2012. [Google Scholar]
- Casaubieilh, P.; Thiebaut, F.; Bosma, B.; Retzler, C.; Shaw, M.; Letertre, Y.; Sheng, W. Performance Improvements of Mooring Systems for Wave Energy Converters. In Proceedings of the 1st International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–26 November 2014. [Google Scholar]
- Harnois, V.; Weller, S.D.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soule, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887. [Google Scholar] [CrossRef]
- Parmeggiani, S.; Kofoed, J.P.; Friis-Madsen, E. Experimental study related to the mooring design for the 1.5 MW wave dragon WEC demonstrator at DanWEC. Energies 2013, 6, 1863–1886. [Google Scholar] [CrossRef]
- ANSYS. Aqwa Theory Manual; ANSYS Inc.: Pittsburgh, PA, USA, 2013. [Google Scholar]
- Bhinder, M.A.; Karimirad, M.; Weller, S.; Debruyne, Y.; Guérinel, M.; Sheng, W. Modelling Mooring Line Non-Linearities (Material and Geometric Effects) for a Wave Energy Converter Using AQWA, SIMA and Orcaflex. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Murphy, S.; Bhinder, M.A.; Casaubieilh, P.; Sheng, W. Effects of Tidal Range on Mooring Systems of Wave Energy Converters. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Angelelli, E.; Zanuttigh, B.; Martinelli, L.; Ferri, F. Physical and Numerical Modelling of Mooring Forces and Displacements of a Wave Activated Body Energy Converter. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- ORCINA. OrcaFlex User Manual; Orcina Ltd.: Cumbria, UK, 2015. [Google Scholar]
- Rhinefrank, K.; Schacher, A.; Prudell, J.; Cruz, J.; Jorge, N.; Stillinger, C.; Naviaux, D.; Brekken, T.; von Jouanne, A.; Newborn, D.; et al. Numerical and Experimental Analysis of a Novel Wave Energy Converter. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Low, Y.M.; Langley, R.S. Time and frequency domain coupled analysis of deepwater floating production systems. Appl. Ocean Res. 2006, 28, 371–385. [Google Scholar] [CrossRef]
- Thies, P.R.; Johanning, L.; Smith, G.H. Assessing mechanical loading regimes and fatigue life of marine power cables in marine energy applications. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2012, 226, 18–32. [Google Scholar] [CrossRef]
- Johanning, L.; Smith, G.H. Improved Measurement technologies for floating wave energy converter (WEC) mooring arrangements. Underw. Technol. 2008, 27, 175–184. [Google Scholar] [CrossRef]
- Elwood, D.; Schacher, A.; Rhinefrank, K.; Prudell, J.; Yim, S.; Amon, E.; Brekken, T.; von Jouanne, A. Numerical Modeling and Ocean Testing of a Direct-Drive Wave Energy Device Utilizing A Permanent Magnet Linear Generator for Power Take-Off. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Teillant, B.; Debruyne, Y.; Sarmento, A.; Gomes, R.; Gato, L.M.; Fontana, M.; Philippe, M.; Combourieu, A. Integration of Breakthrough Concepts into the OWC Spar Buoy. In Proceedings of the 2nd International Conference on Renewable Energies Offshore, Lisbon, Portugal, 24–28 October 2016. [Google Scholar]
- Elwood, D.; Yim, S.C.; Amon, E.; von Jouanne, A.; Brekken, T.K.A. Experimental force characterization and numerical modeling of a taut-moored dual-body wave energy conversion system. J. Offshore Mech. Arct. Eng. 2010, 132, 011102:1–011102:6. [Google Scholar] [CrossRef]
- Soulard, T.; Babarit, A.; Borgarino, B.; Wyns, M.; Harismendy, M. C-HYP: A Combined Wave and Wind Energy Platform with Balanced Contributions. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Nicholls-Lee, R.; Walker, A.; Hindley, S.; Argall, R. Coupled Multi-Phase CFD and Transient Mooring Analysis of the FloatingWave Energy Converter OWEL. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Pizer, D.J.; Retzler, C.; Henderson, R.M.; Cowieson, F.L.; Shaw, M.G.; Dickens, B.; Hart, R. Pelamis WEC—Recent Advances in the Numerical and Experimental Modelling Programme. In Proceedings of the 6th EuropeanWave and Tidal Energy Conference, Glasgow, UK, 29 August–2 September 2005. [Google Scholar]
- DNV. DeepC User Manual; DNV Software: Høvik, Norway, 2010. [Google Scholar]
- Yang, S.H.; Ringsberg, J.W.; Johnson, E. Analysis of Mooring Lines for Wave Energy Converters: A Comparison of De-Coupled and Coupled Simulation Procedures. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Herduin, M.; Gaudin, C.; O’Loughlin, C. Multi-Directional Loading Cases on Shared Anchors for an Array of Wave Energy Converters. In Proceedings of the 3rd Asian Wave and Tidal Energy Conference, Singapore, 24–28 October 2016. [Google Scholar]
- WOOD. Flexcom Technical Manual; Wood Group Kenny: Galway, Ireland, 2014. [Google Scholar]
- Martinelli, L.; Lamberti, A.; Ruol, P.; Ricci, P.; Kirrane, P.; Fenton, C.; Johanning, L. Power Umbilical for Ocean Renewable Energy Systems-Feasibility and Dynamic Response Analysis. In Proceedings of the 3rd International Conference on Ocean Energy, Bilbao, Spain, 6–8 October 2010. [Google Scholar]
- PROTEUS. ProteusDS 2015 Manual; Dynamic System Analysis Ltd.: Victoria, BC, Canada, 2016. [Google Scholar]
- Hall, M.; Buckham, B.; Crawford, C. Evaluating the importance of mooring line model fidelity in floating offshore wind turbine simulations. Wind Energy 2014, 17, 1835–1853. [Google Scholar] [CrossRef]
- Ma, K.; Shu, H.; Smedley, P.; L’Hostis, D.; Duggal, A. A Historical Review on Integrity Issues of Permanent Mooring Systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2013. [Google Scholar]
- D’Souza, R.; Majhi, S. Application of Lessons Learned from Field Experience to Design, Installation and Maintenance of FPS Moorings. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2013. [Google Scholar]
- Haugen, S.; Een, V.F.; Seljelid, J. Causal Relationships and Measures Associated with Structural and Maritime Incidents on the Norwegian Continental Shelf; Petroleum Safety Authority: Stavanger, Norway, 2014. [Google Scholar]
- Savin, A.; Svensson, O.; Leijon, M. Azimuth-Inclination Angles and snatch load on a tight mooring system. Ocean Eng. 2012, 40, 40–49. [Google Scholar] [CrossRef]













| Ref. | System | Power | Remarks Advantages/Disadvantages |
|---|---|---|---|
| [98] | Wave Dragon | 11 MW | It is portable, the installation process is easy, but it operates in limited places, and also is expensive |
| [98] | Power Buoy | 11 MW | Continuous electricity produced from all of the directions, but their installation required in far and deep sea |
| [82] | Oyster | 800 kW | It creates no pollution and maintenance process is easy, but it requires a large area for operation |
| [98] | Pelamis | 750 kW | It is portable, and the maintenance process is easy, but it is expensive |
| [99] | Penguin | 500 kW | It is reliable and durable for extreme environments, and the maintenance process is easy, but it requires a large area |
| [82] | LIMPET | 500 kW | It is installed nearshore and has a low maintenance cost, but their initial costs are high |
| Mooring Lines | Installation | Remarks |
|---|---|---|
| Chain | Easy | High abrasion, intermediate fatigue resistance, low elasticity, and low cost |
| Wire Rope | Intermediate | High abrasion, high fatigue resistance, low-intermediate elasticity, and intermediate cost |
| Synthetic Rope | Hard | Polypropylene nylon: Low fatigue resistance, low abrasion, high elasticity, and cheap cost Polyester: High fatigue resistance, abrasion, and elasticity, and costs are intermediate Aramid HMPE: Very high fatigue resistance, intermediate abrasion, low elasticity, and expensive cost |
| Anchors | Ultimate Holding Capacity (UHC) | Load Direction | Cost | Remarks | |
|---|---|---|---|---|---|
| Omnidirectional | Horizontal | ||||
| Deadweight | Lowest | - | Good | Expensive for UHC | Useful for all soil types |
| Drag-embedment Anchor | Highest | Good | Good | Cheapest | Perform well for all soil types, except hard rock |
| Piles | Low | Good | Good | Expensive | Perform well for soft and medium clay, but not suitable for hard clay and rock. For sand, only driven pile performs well |
| Vertical Load Anchor | High | Good | Good | Expensive | Perform well for soft and medium clay, but not suitable for sand, hard clay, and hard rock |
| Type of Approach | References of Publications |
|---|---|
| Numerical Modeling | [139,140,141,142,143] |
| Numerical and Experimental | [144,145,146,147,148] |
| Physical Experiment | [149,150,151,152,153] |
| Documents | Scope | References |
|---|---|---|
| DNVGL OS E301 | Details of mooring processes | [159] |
| ISO/TS 14909 | Offshore station fiber ropes with a high polyethylene modulus | [160] |
| IEC TS 62600-10 | Details of mooring practices | [161] |
| DNVGL OS E304 | Wire ropes details | [162] |
| DNV-RP-H103 | Details of marine operations | [163] |
| DNV OS J103 | Environmental loads | [164] |
| DNVGL RP F205 | The method of dynamic analysis for floating structure | [165] |
| CIRIA C666 | Metocean data | [166] |
| DNVGL RP N103 | Marine operation analysis and modeling | [167] |
| DNV RP C205 | Environmental loading calculations details | [168] |
| API RP 2SM | Synthetic rope details | [169] |
| DNVGL RP E302 | Plate anchors installation and design information | [170] |
| API RP 2I | Mooring hardware inspection | [171] |
| ISO 18692 | Polyester mooring ropes details | [172] |
| DNVGL OS E303 | Fiber ropes information | [173] |
| ISO 19901-7 | Detailed of mooring practices | [174] |
| DNVGL OS C101 | Details of steel structures in offshore | [175] |
| Nearshore Position Mooring | Environment loads | [176] |
| DNVGL OS E302 | Mooring chain details | [177] |
| Type of WEC | Mooring System | References |
|---|---|---|
| Heaving Point Absorber | Spread mooring with three cables | [207] |
| Two Body Heaving Point Absorber | Spread mooring with four cables | [208] |
| Overtopping | CALM | [151,209] |
| Attenuator | Spread hybrid | [210] |
| Point Absorber | Submerged buoy floater without and with a slack chain | [211] |
| Two Body Heaving Point Absorber | Three-point mooring with multiple legs | [212] |
| Oscillating Wave Surge | Spread taut | [213] |
| Multi-point Absorbs | CALM | [124] |
| Point Absorber | Spread slack | [207] |
| Heaving Point Absorber | Floaters and weights with a slack chain | [214] |
| Large-size Floating WECs | Taut SALM and SPM | [184] |
| Overtopping | Five catenary cables attached to WEC | [215] |
| Attenuator | Single point catenary | [216] |
| Point Absorber | Spread catenary | [217] |
| Floating Oscillating Water Column | CALM | [218] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, D.; Haider, R.; Yan, J.; Ning, D.; Li, B. Review of Wave Energy Converter and Design of Mooring System. Sustainability 2020, 12, 8251. https://doi.org/10.3390/su12198251
Qiao D, Haider R, Yan J, Ning D, Li B. Review of Wave Energy Converter and Design of Mooring System. Sustainability. 2020; 12(19):8251. https://doi.org/10.3390/su12198251
Chicago/Turabian StyleQiao, Dongsheng, Rizwan Haider, Jun Yan, Dezhi Ning, and Binbin Li. 2020. "Review of Wave Energy Converter and Design of Mooring System" Sustainability 12, no. 19: 8251. https://doi.org/10.3390/su12198251
APA StyleQiao, D., Haider, R., Yan, J., Ning, D., & Li, B. (2020). Review of Wave Energy Converter and Design of Mooring System. Sustainability, 12(19), 8251. https://doi.org/10.3390/su12198251