We first present the findings based on the descriptive statistics of the sample. In
Section 4.1, we will zoom in on the socio-demographic characteristics of the respondents and their opinions on the shuttle aspects. Furthermore, passenger views on the usefulness of the shuttle testing are discussed, as well as worries about autonomous vehicles. In the next section, we focus on the passengers’ experience and expectation of shuttle use. In
Section 4.3, opinions regarding the necessity of cars are studied, and we consider environmental awareness and usage expectation. Lastly, in
Section 4.4, the findings of the correlation analysis are described, and hierarchical multiple regression analysis results are presented.
4.1. Passenger and Shuttle Characteristics
In Woluwe park, the final sample of the study included 384 respondents, 47.92% of whom were male. The respondents were aged between 17 and 91, with a mean age of 44.27 years. Regarding their occupation, 70.31% of the respondents were working or currently unemployed, 16.93% were retired and 12.76% were students. Furthermore, for 64.84% of the respondents, the highest obtained degree was a university or college degree.
At the Brussels Health Campus, a total of 145 respondents completed the survey for shuttle passengers, 42.76% of which were male. As the trajectory was situated on a university campus, 73.10% of the respondents were students and 68.97% were below the age of 25. For 40% of the respondents, the highest obtained degree was a university or college degree, while for 44% of the respondents, the highest obtained degree was a high school degree. In both samples, the majority of the respondents indicated that their main mode of transport in the Brussels capital region was public transport; a third used a car or motorcycle and a few travelled by bicycle or on foot. The main characteristics of the two samples are listed in
Table 3.
After indicating their main mode of transport, respondents were asked to select reasons for using that mode. The options were “price (cheaper)”, “no traffic”, “better for the environment”, “less stressful”, “faster”, “comfort” and “I have no alternative”. In the Woluwe sample, 83 respondents selected “better for the environment” as one of the reasons for their choice of transport mode. At the Brussels Health Campus, 50 respondents selected the “better for the environment” option.
At both sites, the respondents were asked to rate their experience on a seven-point Likert scale with the shuttle in terms of several aspects:
comfort of the vehicle, ease of getting in and out of the vehicle, the driving behaviour of the vehicle and the experience in general. As can be seen in
Figure 3, respondents generally rated these aspects positively. The general experience reached an average score of 6.1 for the Woluwe site and 6.0 for the Health Campus, indicating that respondents felt that they had a good experience with the shuttle. Respondents found it easy to board and exit the vehicle, with average ratings of 6.4 for Woluwe and 6.3 for the Health Campus. The driving behaviour of the shuttle was also positively rated by the respondents, with average scores of 6.5 for Woluwe and 5.8 for the Health Campus. The slightly dispersed ratings between both sites might be due to the difference of the traffic situation in each of the sites. At the Health Campus, the shuttle drove by parked cars and interacted with other motor vehicles. In Woluwe Park, only soft transport modes interacted with the vehicle along its trajectory. Lastly, most respondents appreciated the comfort of the shuttle, with average scores of 5.8 for Woluwe and 6.0 for the Brussels Health Campus. The respondents’ comments indicated that the negative ratings regarding the comfort of the vehicle could be linked to the discomfort of the seating in the shuttle. Several respondents remarked that they did not appreciate the “hard wooden seating”, which is “not suitable for long travel”.
The respondents also evaluated the
availability and professionalism of the accompanying personnel, as there was a safety operator on board at all times.
Figure 4 shows that the opinions were very positive, with ratings mostly ranging from “good” to “very good”. In the Woluwe park, over 96% of the passengers rated the availability and professionalism of the accompanying personnel as “good” or “very good”. At the Brussels Health Campus, the satisfaction with the on-board personnel was even more pronounced, with over 62% of the respondents rating availability and professionalism as “very good”. This indicates that the service of the operator in the autonomous vehicles is much appreciated. Additionally, in the open comment section of the survey, respondents often pointed out that they particularly appreciated the on-board personnel and their knowledge of the technology. Additionally, some respondents pointed out that they appreciated the available information about the shuttle and the technology that was available at the stops.
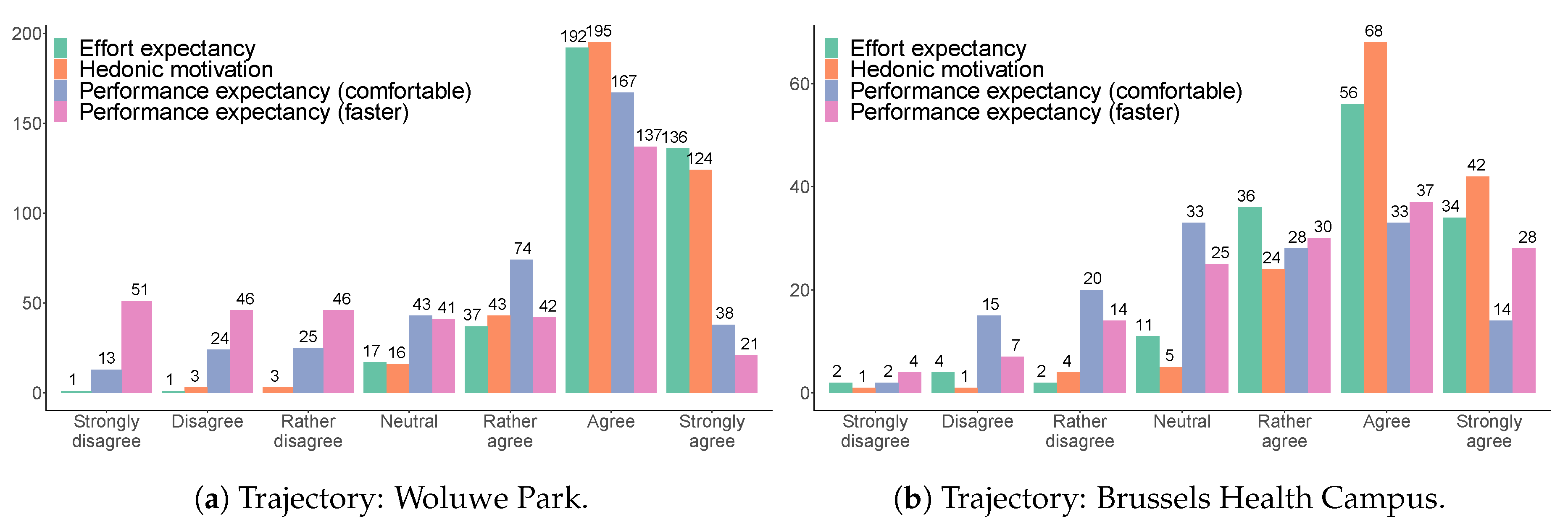
At both sites, respondents were asked to rate three statements concerning
the usefulness of shuttle testing (see
Figure 5). Passengers agreed that testing autonomous shuttles at their respective sites is useful and does not bother them. At the Woluwe site, 194 passengers agreed that the test corresponded to their needs, while at the Brussels Health Campus, 66 respondents found themselves in a neutral position towards the statement.
Additionally, respondents were asked to indicate their agreement with two statements linking the image of the public transport operator or the Brussels Health Campus to the respective pilot tests. Passengers from the Brussels Health Campus found that testing autonomous vehicle technology on the campus fit the image of the campus and gave a positive image to the campus. Similarly, passengers from the Woluwe Park agreed that the autonomous shuttle test fit the image of the public transport operator and gave it a positive image (see
Figure 6).
At Woluwe Park, respondents were asked about the responsibility of the public transport operator to test new mobility solutions and technology. A majority—284 respondents—stated that they believe that this is the role of the public transport operator.
Figure 7 shows the respondents’ ratings to the negative formulation of the statement.
In the final section of the survey on the experience and expectations of autonomous shuttles, respondents were asked whether they had any worries with regard to autonomous vehicles. To this question, 75% of the Woluwe respondents and 70% of the Health Campus respondents answered “no”. If respondents answered “yes”, they were invited to comment on the kinds of worries they had. Their comments showed that the most frequent concerns were related to emergencies (danger, accident, obstacle), technical or technological failures of the vehicle and its behaviour in a regular traffic situation (“How would it react in dense traffic situations”, “There are always concerns in normal traffic situations for the pedestrians”, “In this setting no, elsewhere yes”, “Reaction towards other vehicles” and “On the road”). Respondents also expressed frequent concerns about the function of the vehicle in everyday life (“How would they be integrated in everyday life”, “Where to put them IRL (in real life)” and “What place does it have in the real circulation”), the loss of driver jobs and the risk of external misuse of the intelligent driving system (“What if it is hacked and misused” and “Risk of being boycotted”). To a lesser extent, respondents worried about the operation of the vehicle in poor weather conditions (such as rain and snow) and the possibility of acting as a replacement for active modes of transport. Lastly, a respondent commented, “I would be unable to board without on-board personnel”. Although a button on the outside of the vehicle is used to activate the wheelchair ramp, the design of the surrounding infrastructure and stops must permit the use of the ramp.
Regardless of expressing worries concerning AVs, all respondents were provided with the option of entering any remark they might have about the shuttle test or autonomous shuttles in general. First, regarding the shuttle aspects, respondents mentioned the low speed of the vehicle and the discomfort of the seats. Second, several respondents expressed their concern for the job security of drivers: “If it becomes widespread it will lead to job loss, no more drivers, no more work for them”, “Loss of driver jobs” and “If everything is automated, what about the employment of the drivers?”. Third, some respondents were concerned about the “lack of social control (delinquency, violence, …)”. Fourth, in line with the respondents’ impressions regarding the test and the image it provides, they remarked that it is an “Excellent initiative”, “It is cool”, “It is positive” and “Super”. Lastly, while excited about the test, respondents found it hard to imagine the use of autonomous shuttles as they experienced them in a real urban setting. However, they expressed belief that an AS can serve a purpose on campuses and at hospitals. More importantly, respondents expressed a belief in the usefulness of AS transport for people with reduced mobility and therefore argued that more space should be provided for wheelchairs and strollers.
4.3. Passengers’ Opinions on the Necessity of Cars and Environmental Concern
Next, we describe the
passengers’ opinions on the necessity of cars. Part of the goal of providing first/last mile shuttle trajectories is to improve the connection between car-dependent areas and the public transport network to contribute to more sustainable mobility solutions. Even though the shuttle did not operate in such a setting, respondents were asked to consider if they believed that owning a car would be less necessary after the adoption of autonomous vehicles. The respondents’ opinions to this statement are plotted in
Figure 10. A different picture was found for the two sites: at the Brussels Health Campus, 53% of the respondents thought that owning a car would no longer be necessary; in contrast, at Woluwe Park, half of the respondents disagreed with the statement (rather disagree to strongly disagree).
Focusing more closely on the aspect of the necessity of cars, the ratings were plotted against different socio-demographic attributes of the sample.
Table 5 and
Table 6 show the respondents’ ratings with regards to the necessity of cars for each age group. At the Woluwe Park site, respondents between the ages of 25 and 64 generally disagreed with the statement of a reduced necessity of cars. More than 50%f the respondents within each age group expressed disagreement: 51.06% in the 25 to 34 age group, 57.14% in the 35 to 44 age group, 55.77% in the 45 to 54 age group, and 58.14% in the 55 to 64 age group. In the younger age group of 15 to 24 years of age, 42.55% disagreed with the statement. Finally, the share of respondents in disagreement with the statement in the category older than 65 was 35.09%. Among the older passengers, agreement with the statement was highest and reached 45.61%. At the Brussels Health Campus, 70% of the respondents were aged between 15 and 24, and 51.49% of them believed that cars would be less necessary after AV adoption.
Figure 11 shows the respondents’ opinions regarding the necessity of cars per occupation type. The respondents were grouped into the categories of student, working or retired based on their selected work situation. Within the Woluwe Park sample, 70% of the respondents fell within the working group, of which 54.44% did not believe that the necessity of cars would drop after AV adoption. At the Brussels Health Campus, 73% of the passengers are students, of which 51.89% had a positive perception of the reduced need for car ownership.
The figures show that the active working population, aged 25 to 65, indicated a stronger disagreement with regard to reduced necessity of cars after AV adoption than the young and elderly.
While the major share of car users at the Brussels Health Campus felt optimistic about the reduction of car ownership (51.22% agreed), car users at Woluwe Park generally disagreed (57.5%). The majority of respondents, however, used public transport as their primary mode of transportation in Brussels.
Figure 12 shows respondents’ opinions regarding the necessity of cars distributed across three levels of frequency of public transport use: daily, multiple times a week and once a week or less. At the Brussels Health Campus, public transport usage is evenly distributed across the three levels, and respondents within each of the categories generally seemed to believe that cars would be less necessary. At the Woluwe park, the distribution shows a different picture: the majority of the respondents were daily public transport users, and almost half of them did not believe that cars would be less necessary. Additionally, among the frequent and less frequent users of public transport, more than 50% of the respondents disagreed with the statement.
Among the respondents in both samples, several respondents stated that they took
environmental concerns into account in their choice of their primary mode of transportation. For the Woluwe site, this group covers one-fifth of the total sample, and at the Brussels Health Campus, the share of environmentally conscious passengers comprised one-third of the sample.
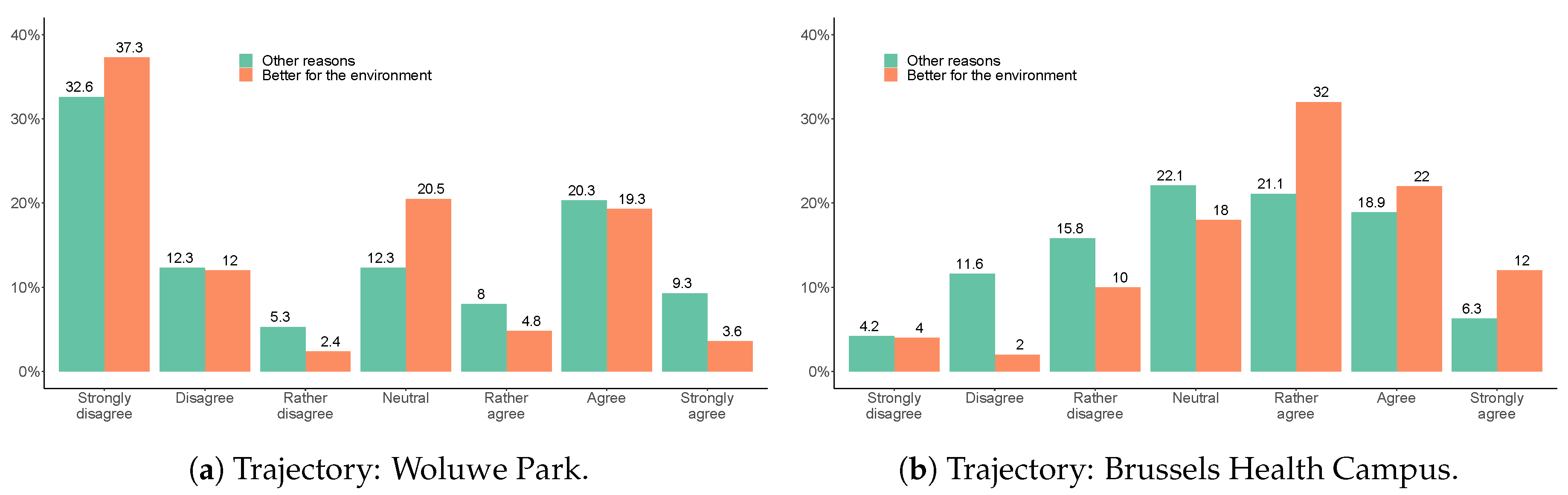
Figure 13 shows the respondents who selected “better for the environment” as one of the reasons behind their choice of transport mode and their intention to use AS in the future. Most of the environmentally-conscious respondents expected to use AS in the future. The distribution of the opinions of this subgroup is similar to the distribution of opinions within the general sample.
Figure 14 shows that environmentally-conscious respondents of the Woluwe sample mostly did not agree that cars would be less necessary after the adoption of AVs. At the Brussels Health Campus, environmentally-conscious respondents were more positive towards the reduction of necessity of cars. The environmentally-conscious respondents comprised 42.86% of the total portion of respondents who believed that cars would be less necessary. In general, the distribution of opinions resembles that of the entire sample.
4.4. Correlations and Hierarchical Multiple Regression Analysis
In the next step, a correlation matrix was calculated to investigate the correlations between the different variables. For the sample of the Brussels Health Campus, a strong correlation of 0.66 can be found between the scoring for the general experience of the shuttle and hedonic motivation (p < 0.01). For the sample from Woluwe Park, no moderate or strong correlations were found.
Table 7 shows the correlations found between behavioural intention and other variables. We assumed equal appearing intervals for the variables measured on a seven-point Likert scale and calculated Pearson’s
r correlations between behavioural intention and effort expectancy, hedonic motivation, performance expectancy, general experience and the necessity of cars. We calculated Spearman’s
p correlations between behavioural intention and the variables of gender, occupation, degree, worries and environmental consciousness.
Here, we note that for the Brussels Health Campus, moderately strong correlations were found between behavioural intention and the items of the UTAUT2 model. In contrast, for Woluwe Park, the UTAUT2 items showed rather weak correlations with behavioural intention. Besides the items related to the shuttle experience, the questionnaire asked whether respondents had any worries concerning autonomous vehicles in general. They were also asked to rate whether they believed that autonomous shuttles would decrease the need to own a personal vehicle. Lastly, respondents were asked to indicate their most used mode of transportation and their reasons for choosing that mode. A new dichotomous variable, environmentally conscious, was created based on this question, indicating whether “better for the environment” was one of the options behind choosing a specific mode of transport.
For both studies, correlations between the dependent variable and these other variables were found to be very weak (r < 0.20). It can be noted that, although respondents indicated having worries with regard to AVs, this did not significantly influence their intention to use AS in the future. Furthermore, having a future intention to use autonomous shuttle did not seem to be strongly related to the necessity of owning a personal car. Finally, environmental consciousness and usage intention showed a very weak negative correlation.
To further investigate the relationships between respondents’ usage intention and the independent variables, a hierarchical multiple linear regression was performed [
22,
27]. In the first step, the linear model included the items based on the UTAUT2 model. In the second step, socio-demographic factors were added. In the third step, the general experience with the autonomous shuttle was added. In the fourth step, environmental consciousness and the necessity of cars were added, which are factors related to personal beliefs.
Prior to evaluating the model as a whole for each of the pilot sites, we used the “OLSRR” package in R to check for the multicollinearity and normality of the outcome [
37]. Firstly, no correlations were larger than 0.70 for both sites, indicating that there was no multicollinearity between the predictor variables. Using collinearity diagnostics, this was confirmed. The minimum tolerance was 0.73 for Woluwe and 0.44 for the Health Campus, and the maximum VIF was 1.37 for Woluwe and 2.28 for the Health Campus [
38]. Secondly, for Woluwe, the interpretation of the Q–Q plot suggests that the outcome of the model is not perfectly normally distributed. For the Health Campus, all the points fell approximately along the 45
reference line; therefore, we can assume normality.
Although the outcome data were not perfectly normally distributed, we continued with the interpretation of the regression results due to the argued robustness of the parametric statistics, even when working with ordinal Likert scale items [
39].
Table 8 shows the results of the hierarchical multiple regression for the Woluwe site. In the first step, the regression results showed that hedonic motivation, effort expectancy and performance expectancy in terms of reaching the destination faster significantly affected usage intention. When accounting for the socio-demographic factors, degree became a significant predictor and added to the variance explained by the model. In the third step, general experience cannibalised the predictive effect of effort expectancy while explaining additional variance. In the final step, we found that environmental consciousness and the necessity of cars did not significantly affect the dependent variable nor add to the variance explained by the model. The model as a whole explained 20% of the usage intention (
).
Table 9 shows the results of the hierarchical multiple regression for the Brussels Health Campus. In the first step, the factors of hedonic motivation, effort expectancy and performance expectancy in terms of reaching the destination in a more comfortable way were found to be significant predictors of usage intention. The second step showed no significant effect in terms of the socio-demographic factors. Adding general experience with the shuttle in the third step and personal beliefs in the fourth step did not significantly explain the additional variance of usage intention, although adding these factors to the model subtracted the predictive effects of performance expectancy (comfortable) and hedonic motivation. The model as a whole explained 54% of the usage intention (
).
At both sites, for step one of the model, hedonic motivation was found to be the strongest predictor of usage intention.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}